
Improving Swimming Performance of Photolithography-Based Microswimmers Using Curvature Structures

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
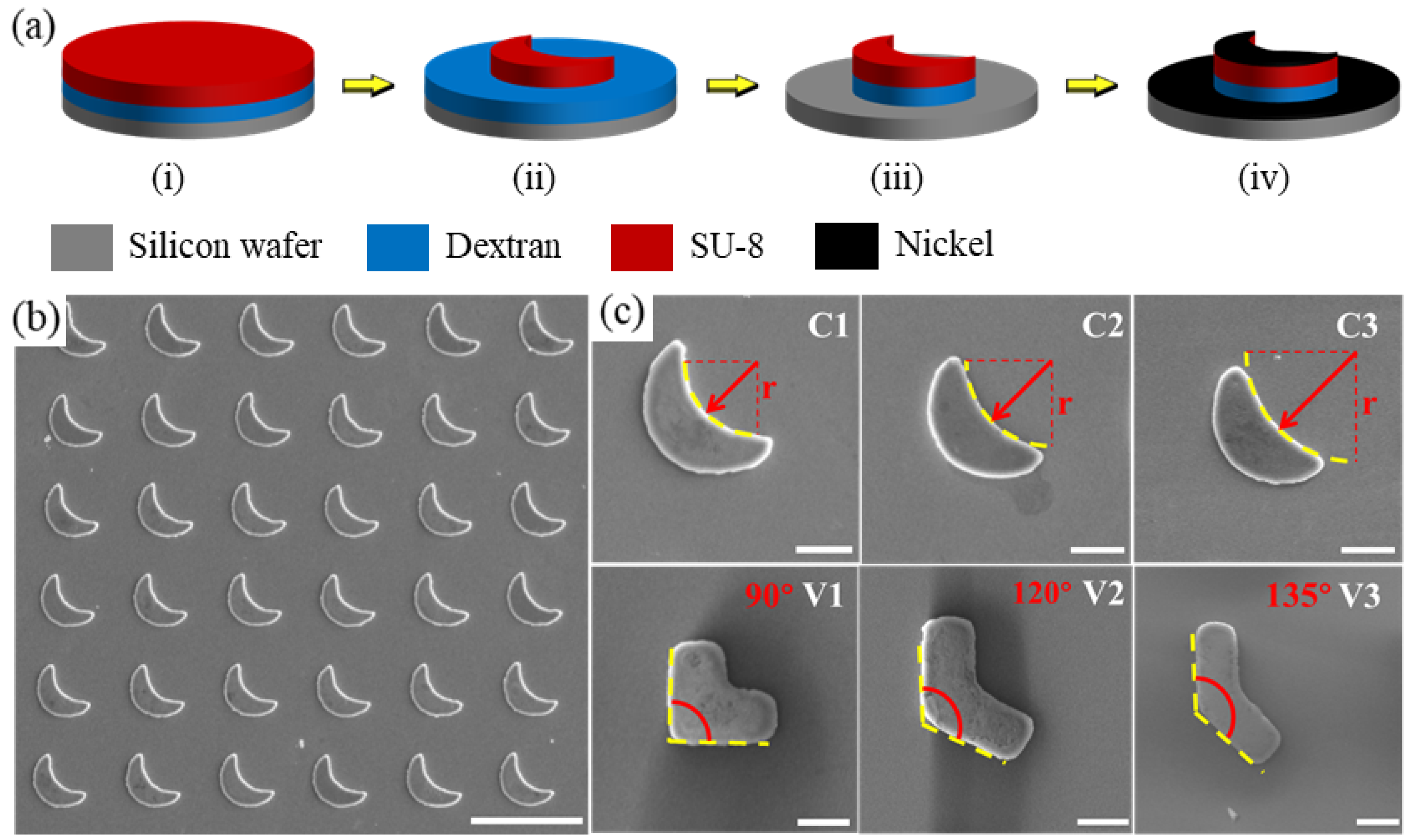
2.1. Microswimmer Fabrication
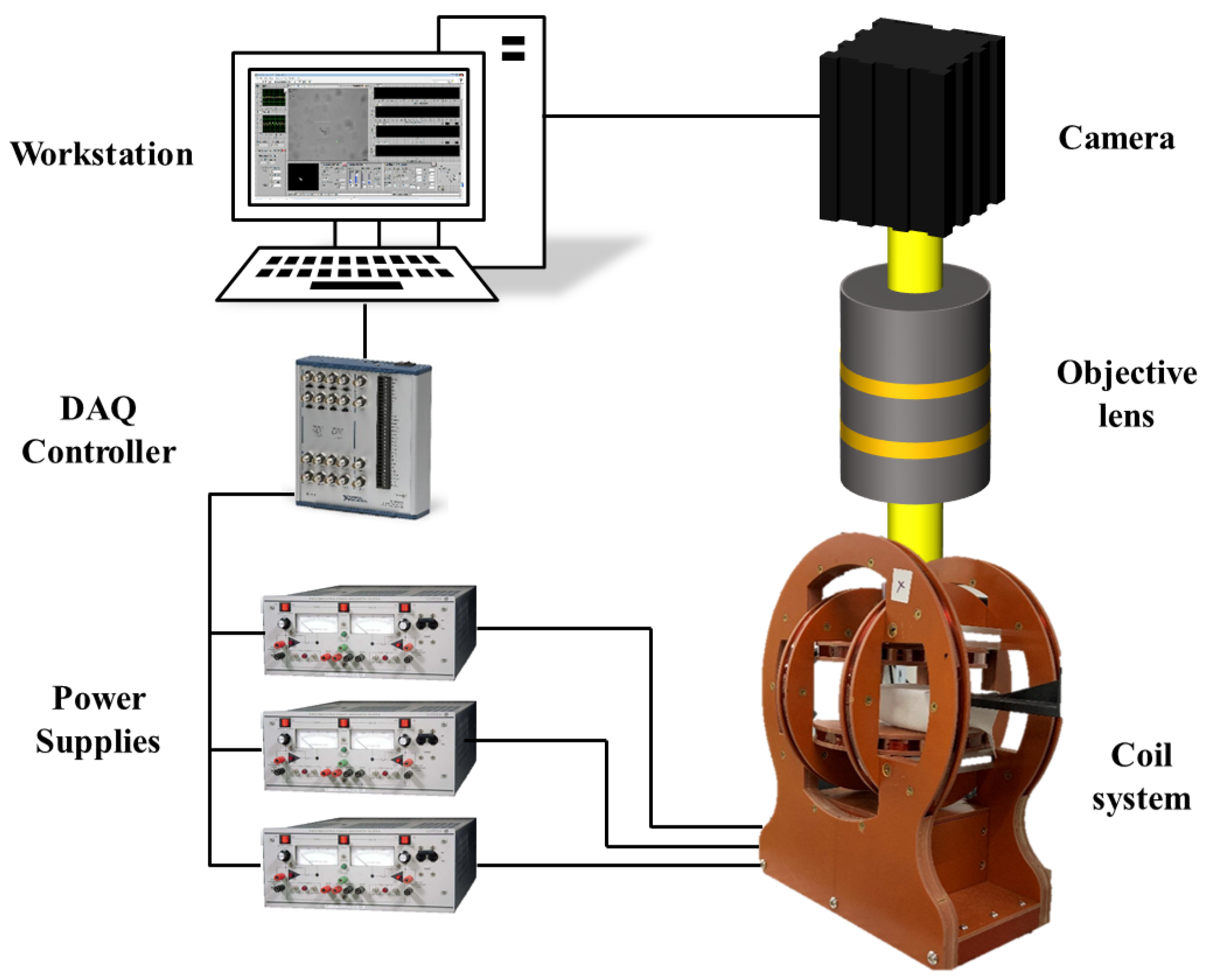
2.2. Actuation Platform and Environment
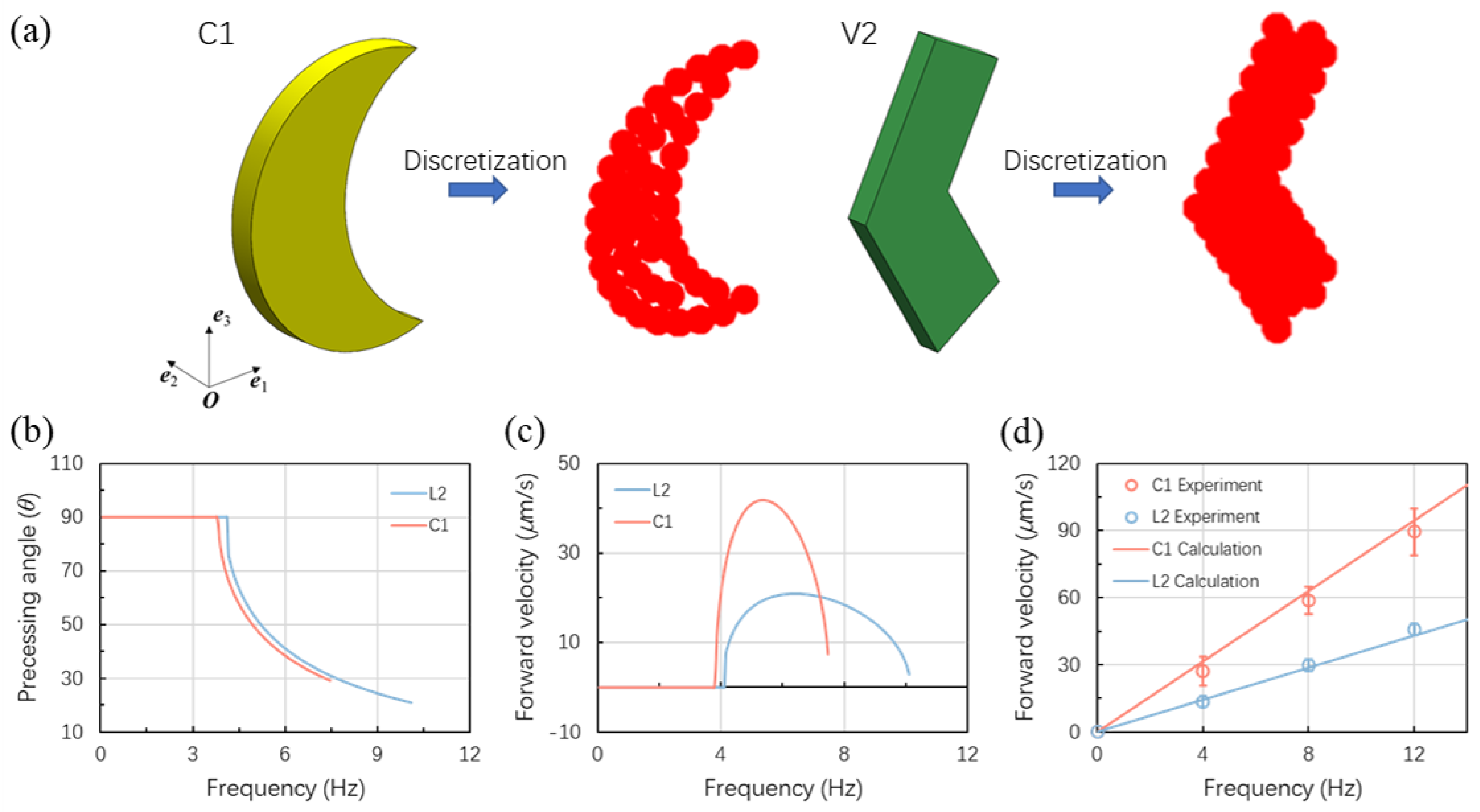
2.3. Theoretical Calculations
3. Results and Discussions
3.1. Fabrication of Microswimmers with Curvatures
3.2. Theoretical Calculations
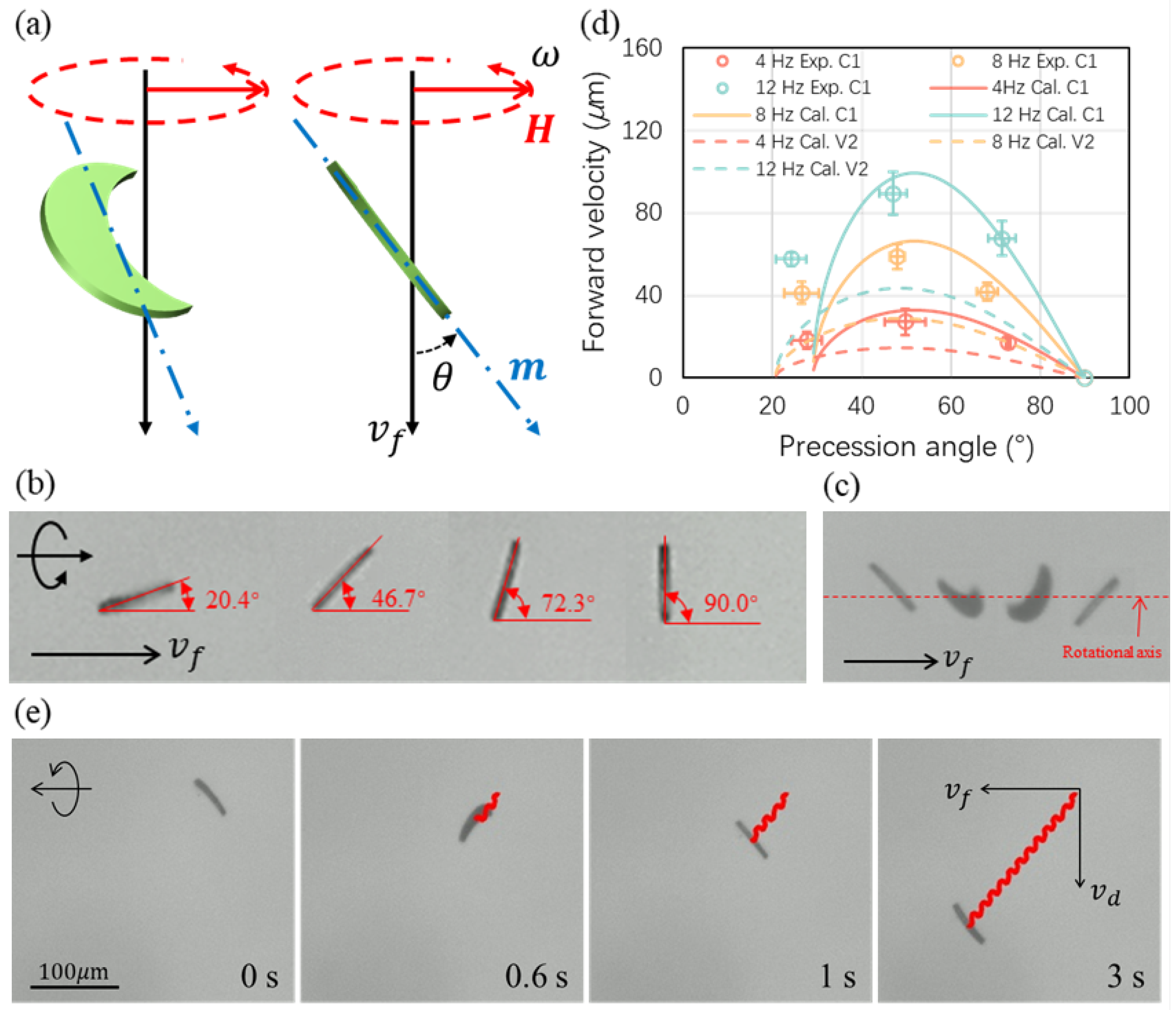
3.3. The Effects of Precession Angle
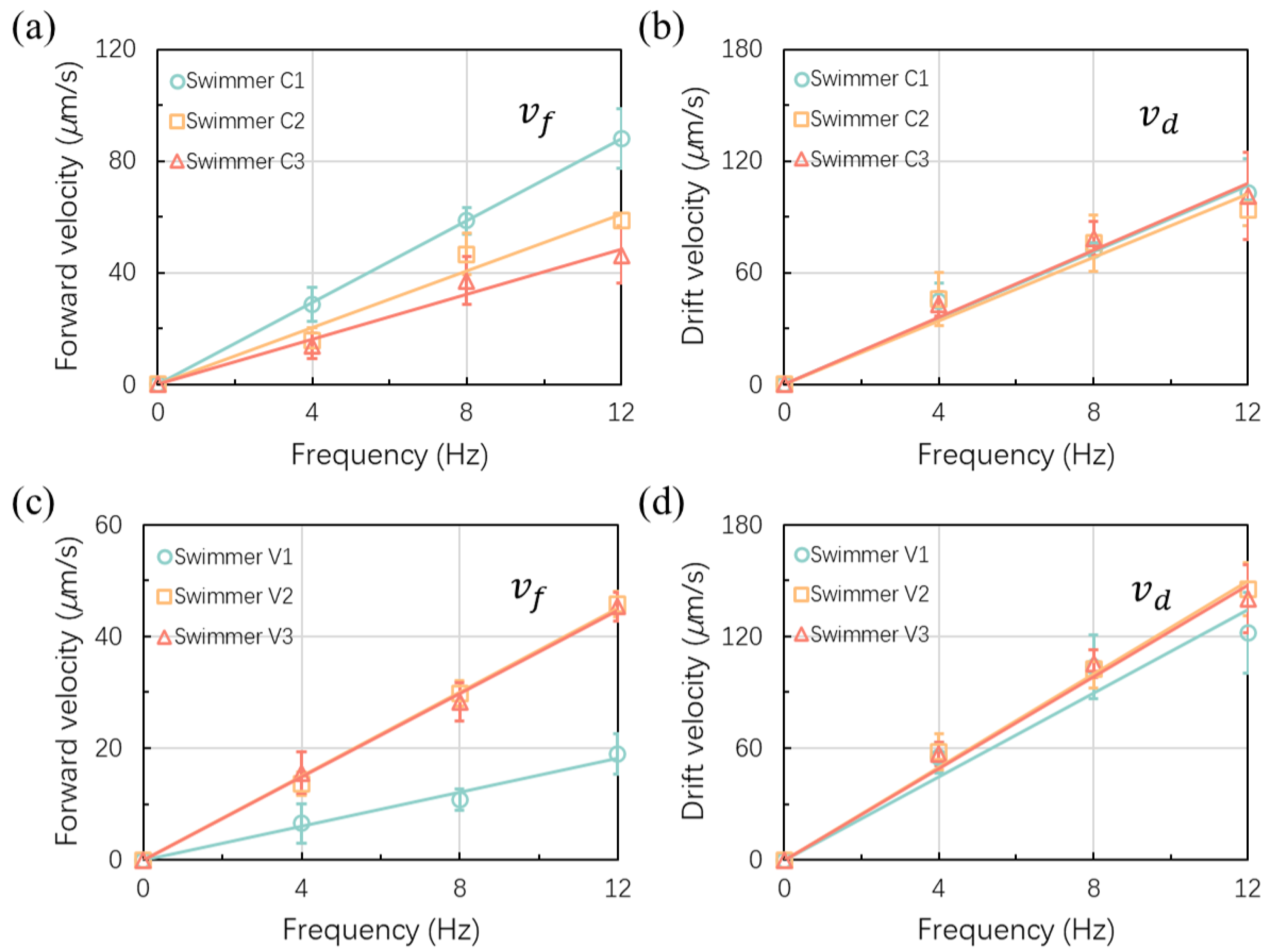
3.4. Swimming Performance with Optimal Precession Angle
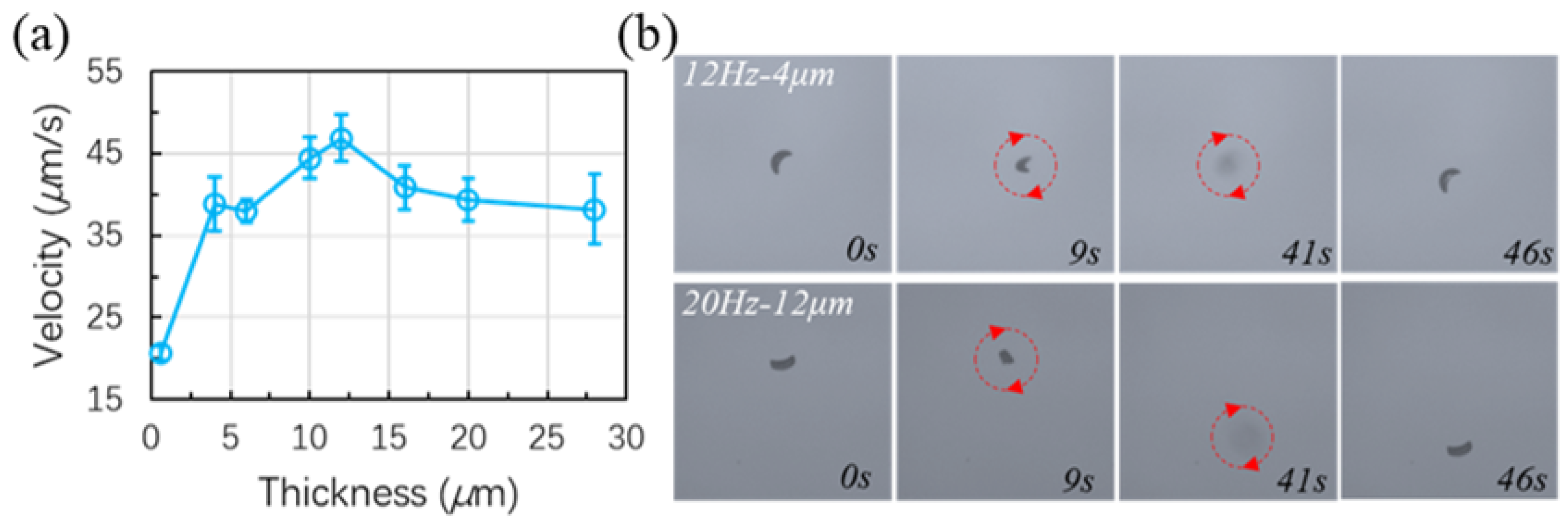
3.5. Thickness Effect and Out-of-Plane Motion
3.6. Discussion on the Swimming Performance
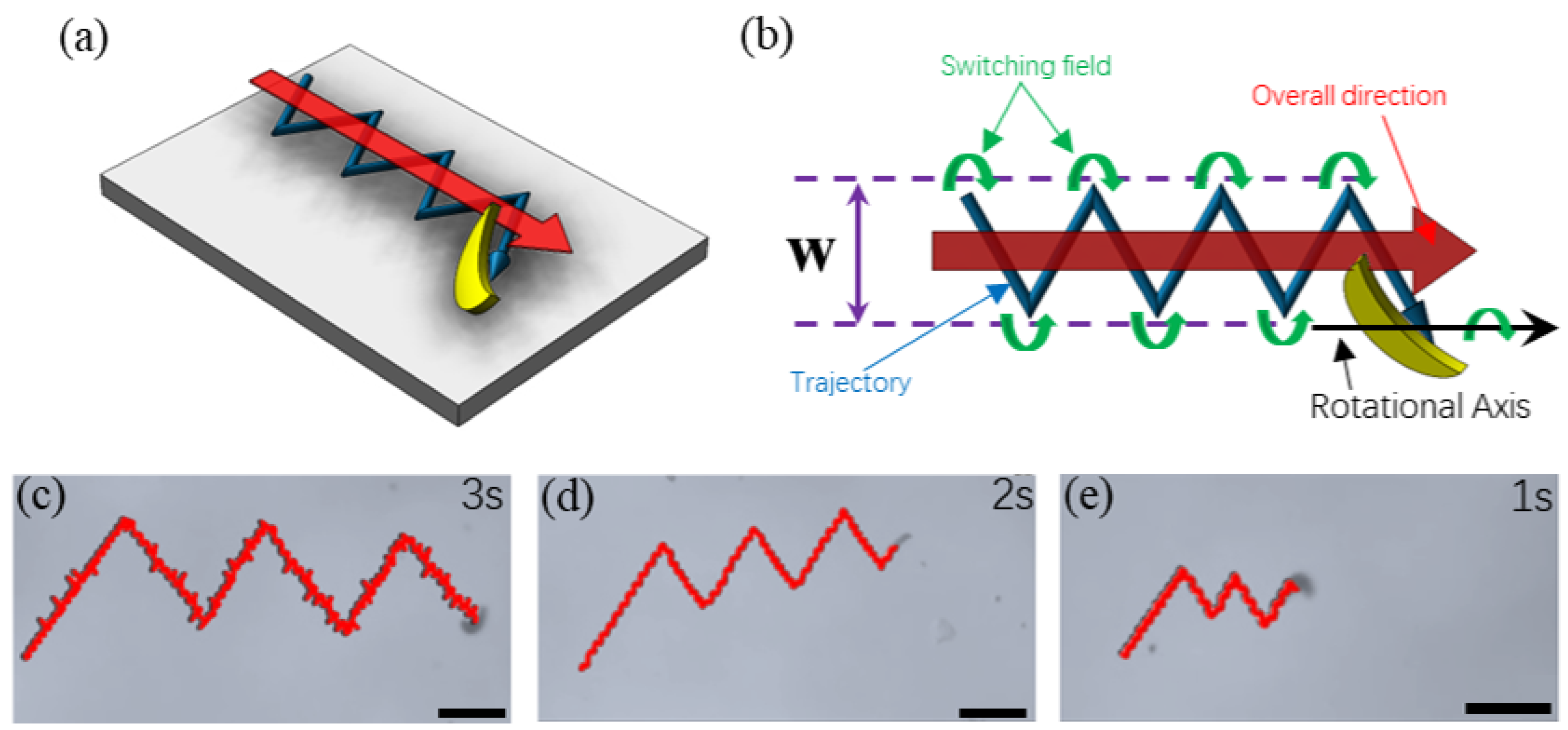
3.7. Zigzag-Trajectory with Unidirectional Swimming
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Lee, H.; Kim, D.I.; Kwon, S.H.; Park, S. Magnetically Actuated Drug Delivery Helical Microrobot with Magnetic Nanoparticle Retrieval Ability. ACS Appl. Mater. Interfaces 2021, 13, 19633–19647. [Google Scholar] [CrossRef] [PubMed]
- Gong, D.; Celi, N.; Zhang, D.; Cai, J. Magnetic Biohybrid Microrobot Multimers Based on Chlorella Cells for Enhanced Targeted Drug Delivery. ACS Appl. Mater. Interfaces 2022, 14, 6320–6330. [Google Scholar] [CrossRef]
- Xi, W.; Solovev, A.A.; Ananth, A.N.; Gracias, D.H.; Sanchez, S.; Schmidt, O.G. Rolled-up magnetic microdrillers: Towards remotely controlled minimally invasive surgery. Nanoscale 2013, 5, 1294–1297. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Aziz, A.; Pane, S.; Iacovacci, V.; Koukourakis, N.; Czarske, J.; Menciassi, A.; Medina-Sánchez, M.; Schmidt, O.G. Medical Imaging of Microrobots: Toward in Vivo Applications. ACS Nano 2020, 14, 10865–10893. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Zhou, H.; Zhang, B.; Cao, Q.; Wang, B.; Ma, X. Recent Progress of Micro/Nanorobots for Cell Delivery and Manipulation. Adv. Funct. Mater. 2022, 32, 2110625. [Google Scholar] [CrossRef]
- Nelson, B.J.; Kaliakatsos, I.K.; Abbott, J.J. Microrobots for minimally invasive medicine. Annu. Rev. Biomed. Eng. 2010, 12, 55–85. [Google Scholar] [CrossRef] [Green Version]
- Purcell, E.M. Life at low Reynolds number. Am. J. Phys. 1977, 45, 3–11. [Google Scholar] [CrossRef] [Green Version]
- Qiu, T.; Lee, T.C.; Mark, A.G.; Morozov, K.I.; Münster, R.; Mierka, O.; Turek, S.; Leshansky, A.M.; Fischer, P. Swimming by reciprocal motion at low Reynolds number. Nat. Commun. 2014, 5, 1–8. [Google Scholar] [CrossRef] [Green Version]
- Zhang, L.; Peyer, K.E.; Nelson, B.J. Artificial bacterial flagella for micromanipulation. Lab A Chip 2010, 10, 2203–2215. [Google Scholar] [CrossRef]
- Tottori, S.; Zhang, L.; Qiu, F.; Krawczyk, K.K.; Franco-Obregõn, A.; Nelson, B.J. Magnetic helical micromachines: Fabrication, controlled swimming, and cargo transport. Adv. Mater. 2012, 24, 811–816. [Google Scholar] [CrossRef]
- Gao, W.; Sattayasamitsathit, S.; Manesh, K.M.; Weihs, D.; Wang, J. Magnetically powered flexible metal nanowire motors. J. Am. Chem. Soc. 2010, 132, 14403–14405. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Kagan, D.; Pak, O.S.; Clawson, C.; Campuzano, S.; Chuluun-Erdene, E.; Shipton, E.; Fullerton, E.E.; Zhang, L.; Lauga, E.; et al. Cargo-towing fuel-free magnetic nanoswimmers for targeted drug delivery. Small 2012, 8, 460–467. [Google Scholar] [CrossRef] [Green Version]
- Dreyfus, R.; Baudry, J.; Roper, M.L.; Fermigier, M.; Stone, H.A.; Bibette, J. Microscopic artificial swimmers. Nature 2005, 437, 862–865. [Google Scholar] [CrossRef]
- Maier, A.M.; Weig, C.; Oswald, P.; Frey, E.; Fischer, P.; Liedl, T. Magnetic Propulsion of Microswimmers with DNA-Based Flagellar Bundles. Nano Lett. 2016, 16, 906–910. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, D.; Dillinger, C.; Hong, A.; Nelson, B.J. Artificial Acousto-Magnetic Soft Microswimmers. Adv. Mater. Technol. 2017, 2, 1700050. [Google Scholar] [CrossRef]
- Hu, W.; Ishii, K.S.; Ohta, A.T. Micro-assembly using optically controlled bubble microrobots. Appl. Phys. Lett. 2011, 99, 094103. [Google Scholar] [CrossRef]
- Li, J.; Li, T.; Xu, T.; Kiristi, M.; Liu, W.; Wu, Z.; Wang, J. Magneto-Acoustic Hybrid Nanomotor. Nano Lett. 2015, 15, 4814–4821. [Google Scholar] [CrossRef]
- Chen, X.Z.; Jang, B.; Ahmed, D.; Hu, C.; De Marco, C.; Hoop, M.; Mushtaq, F.; Nelson, B.J.; Pané, S. Small-Scale Machines Driven by External Power Sources. Adv. Mater. 2018, 30, 201705061. [Google Scholar] [CrossRef]
- Ali, J.; Cheang, U.K.; Darvish, A.; Kim, H.; Kim, M.J. Biotemplated flagellar nanoswimmers. APL Mater. 2017, 5, 1777. [Google Scholar] [CrossRef] [Green Version]
- Li, T.; Li, J.; Zhang, H.; Chang, X.; Song, W.; Hu, Y.; Shao, G.; Sandraz, E.; Zhang, G.; Li, L.; et al. Magnetically Propelled Fish-Like Nanoswimmers. Small 2016, 12, 6098–6105. [Google Scholar] [CrossRef]
- Jang, B.; Gutman, E.; Stucki, N.; Seitz, B.F.; Wendel-García, P.D.; Newton, T.; Pokki, J.; Ergeneman, O.; Pané, S.; Or, Y.; et al. Undulatory Locomotion of Magnetic Multilink Nanoswimmers. Nano Lett. 2015, 15, 4829–4833. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sachs, J.; Morozov, K.I.; Kenneth, O.; Qiu, T.; Segreto, N.; Fischer, P.; Leshansky, A.M. Role of symmetry in driven propulsion at low Reynolds number. Phys. Rev. E 2018, 98, 063105. [Google Scholar] [CrossRef] [Green Version]
- Cheang, U.K.; Kim, M.J. Fabrication and control of simple low Reynolds number microswimmers. Appl. Phys. Lett. 2016, 109, 4954946. [Google Scholar] [CrossRef]
- Cheang, U.K.; Meshkati, F.; Kim, D.; Kim, M.J.; Fu, H.C. Minimal geometric requirements for micropropulsion via magnetic rotation. Phys. Rev. E-Stat. Nonlinear, Soft Matter Phys. 2014, 90, 033007. [Google Scholar] [CrossRef] [Green Version]
- Kei Cheang, U.; Lee, K.; Julius, A.A.; Kim, M.J. Multiple-robot drug delivery strategy through coordinated teams of microswimmers. Appl. Phys. Lett. 2014, 105. [Google Scholar] [CrossRef] [Green Version]
- Kei Cheang, U.; Kim, H.; Milutinović, D.; Choi, J.; Kim, M.J. Feedback Control of an Achiral Robotic Microswimmer. J. Bionic Eng. 2017, 14, 245–259. [Google Scholar] [CrossRef]
- Wang, Q.; Yang, L.; Yu, J.; Zhang, L. Characterizing dynamic swimming behaviors of three-particle magnetic microswimmer near a solid surface. In Proceedings of the 2017 IEEE International Conference on Robotics and Biomimetics, ROBIO 2017, Macau, Macao, 5–8 December 2017; pp. 1442–1447. [Google Scholar] [CrossRef]
- Meshkati, F.; Fu, H.C. Modeling rigid magnetically rotated microswimmers: Rotation axes, bistability, and controllability. Phys. Rev. E-Stat. Nonlinear, Soft Matter Phys. 2014, 90, 063006. [Google Scholar] [CrossRef] [Green Version]
- Tottori, S.; Nelson, B.J. Controlled Propulsion of Two-Dimensional Microswimmers in a Precessing Magnetic Field. Small 2018, 14, 201800722. [Google Scholar] [CrossRef]
- Tan, L.; Ali, J.; Cheang, U.; Shi, X.; Kim, D.; Kim, M. μ-PIV measurements of flows generated by photolithography-fabricated achiral microswimmers. Micromachines 2019, 10, 865. [Google Scholar] [CrossRef]
- Song, X.; Chen, Z.; Zhang, X.; Xiong, J.; Jiang, T.; Wang, Z.; Geng, X.; Cheang, U.K. Magnetic tri-bead microrobot assisted near-infrared triggered combined photothermal and chemotherapy of cancer cells. Sci. Rep. 2021, 11. [Google Scholar] [CrossRef]
- Jiang, T.; Song, X.; Mu, X.; Cheang, U.K. Macrophage-compatible magnetic achiral nanorobots fabricated by electron beam lithography. Sci. Rep. 2022, 12. [Google Scholar] [CrossRef]
- Kim, H.; Ali, J.; Cheang, U.K.; Jeong, J.; Kim, J.S.; Kim, M.J. Micro Manipulation Using Magnetic Microrobots. J. Bionic Eng. 2016, 13, 515–524. [Google Scholar] [CrossRef]
- Linder, V.; Gates, B.D.; Ryan, D.; Parviz, B.A.; Whitesides, G.M. Water-soluble sacrificial layers for surface micromachining. Small 2005, 1, 730–736. [Google Scholar] [CrossRef]
- Happel, J.; Brenner, H. Low Reynolds Number Hydrodynamics—With Special Applications to Particulate Media; Springer Science & Business Media: Berlin/Heidelberg, Germany, 1983; Volume 1. [Google Scholar] [CrossRef]
- Morozov, K.I.; Mirzae, Y.; Kenneth, O.; Leshansky, A.M. Dynamics of arbitrary shaped propellers driven by a rotating magnetic field. Phys. Rev. Fluids 2017, 2, 044202. [Google Scholar] [CrossRef]
- Mirzae, Y.; Dubrovski, O.; Kenneth, O.; Morozov, K.I.; Leshansky, A.M. Geometric constraints and optimization in externally driven propulsion. Sci. Robot. 2018, 3, 8713. [Google Scholar] [CrossRef] [Green Version]
- Tan, L.; Cappelleri, D.J. Modeling of Bilayer Hydrogel Springs for Microrobots with Adaptive Locomotion. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, Prague, Czech Republic, 27 September–1 October 2021; Volume 2, pp. 8507–8514. [Google Scholar]
- Freedman, J.F.; Mayadas A., F.; Klokholm, E. Magnetization in Ni and Ni-Fe Thin Films. IEEE Trans. Magn. 1969, 5, 170–173. [Google Scholar] [CrossRef]
- Abbott, J.J.; Peyer, K.E.; Lagomarsino, M.C.; Zhang, L.; Dong, L.; Kaliakatsos, I.K.; Nelson, B.J. How should microrobots swim? Int. J. Robot. Res. 2009, 28, 1434–1447. [Google Scholar] [CrossRef]
- Ghosh, A.; Mandal, P.; Karmakar, S.; Ghosh, A. Analytical theory and stability analysis of an elongated nanoscale object under external torque. Phys. Chem. Chem. Phys. 2013, 15, 10817–10823. [Google Scholar] [CrossRef]
- Morozov, K.I.; Leshansky, A.M. The chiral magnetic nanomotors. Nanoscale 2014, 6, 1580–1588. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tan, L.; Wang, Z.; Chen, Z.; Shi, X.; Cheang, U.K. Improving Swimming Performance of Photolithography-Based Microswimmers Using Curvature Structures. Micromachines 2022, 13, 1965. https://doi.org/10.3390/mi13111965
Tan L, Wang Z, Chen Z, Shi X, Cheang UK. Improving Swimming Performance of Photolithography-Based Microswimmers Using Curvature Structures. Micromachines. 2022; 13(11):1965. https://doi.org/10.3390/mi13111965
Chicago/Turabian StyleTan, Liyuan, Zihan Wang, Zhi Chen, Xiangcheng Shi, and U Kei Cheang. 2022. "Improving Swimming Performance of Photolithography-Based Microswimmers Using Curvature Structures" Micromachines 13, no. 11: 1965. https://doi.org/10.3390/mi13111965