
A Novel Packaged Ultra-High Q Silicon MEMS Butterfly Vibratory Gyroscope
 ,
,
Abstract
:1. Introduction
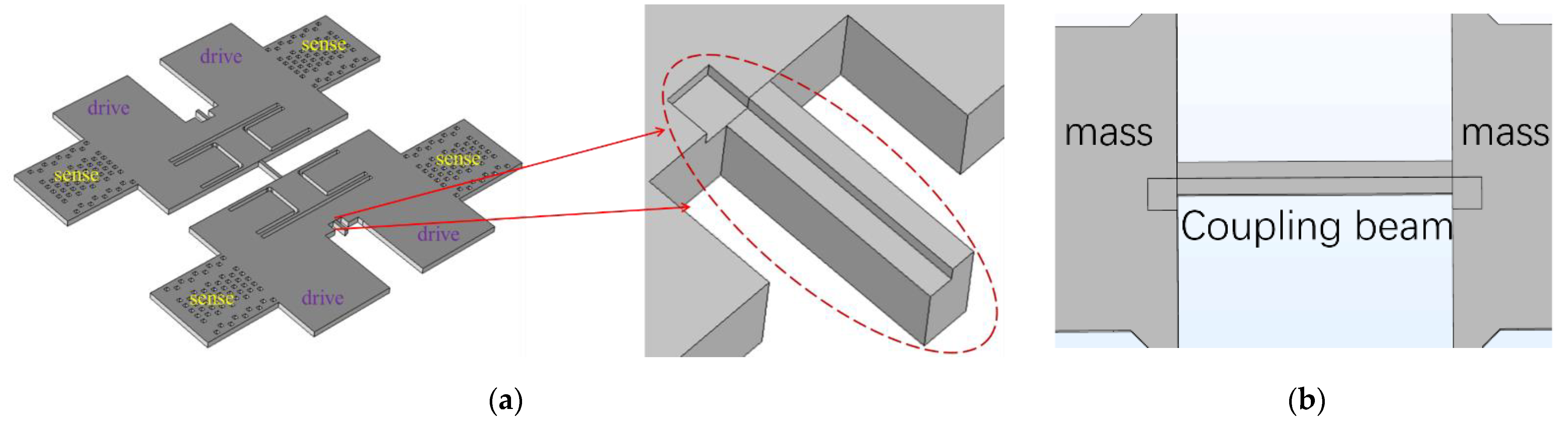
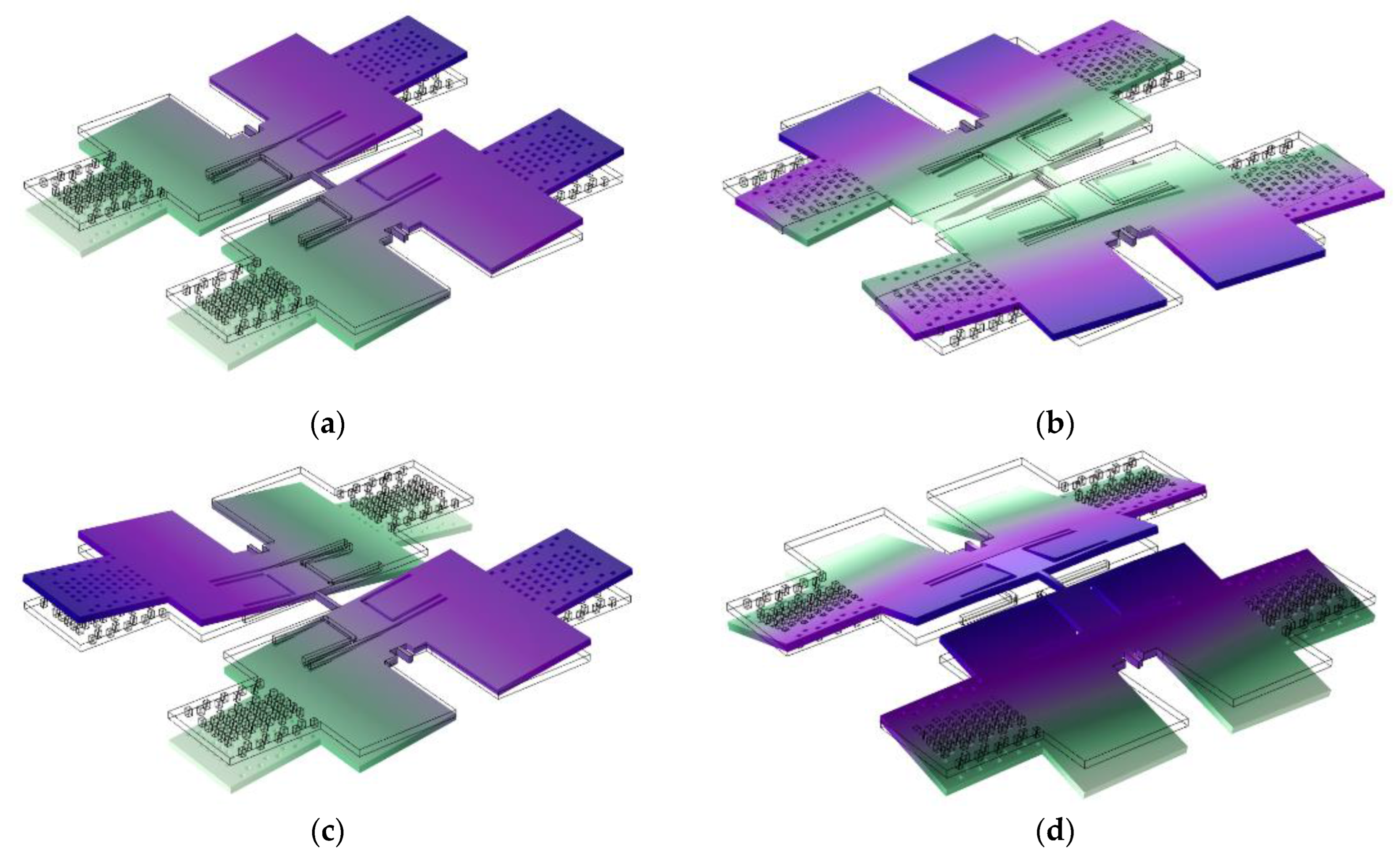
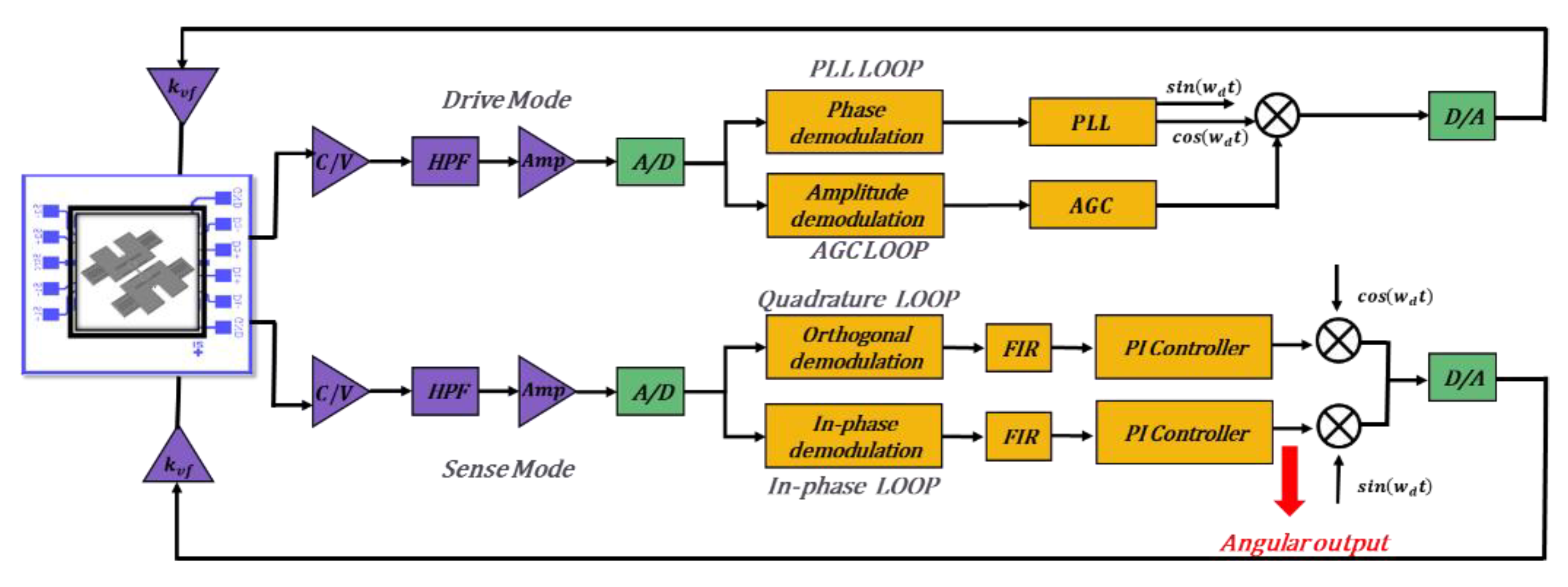
2. Structural Design and Operation Principle
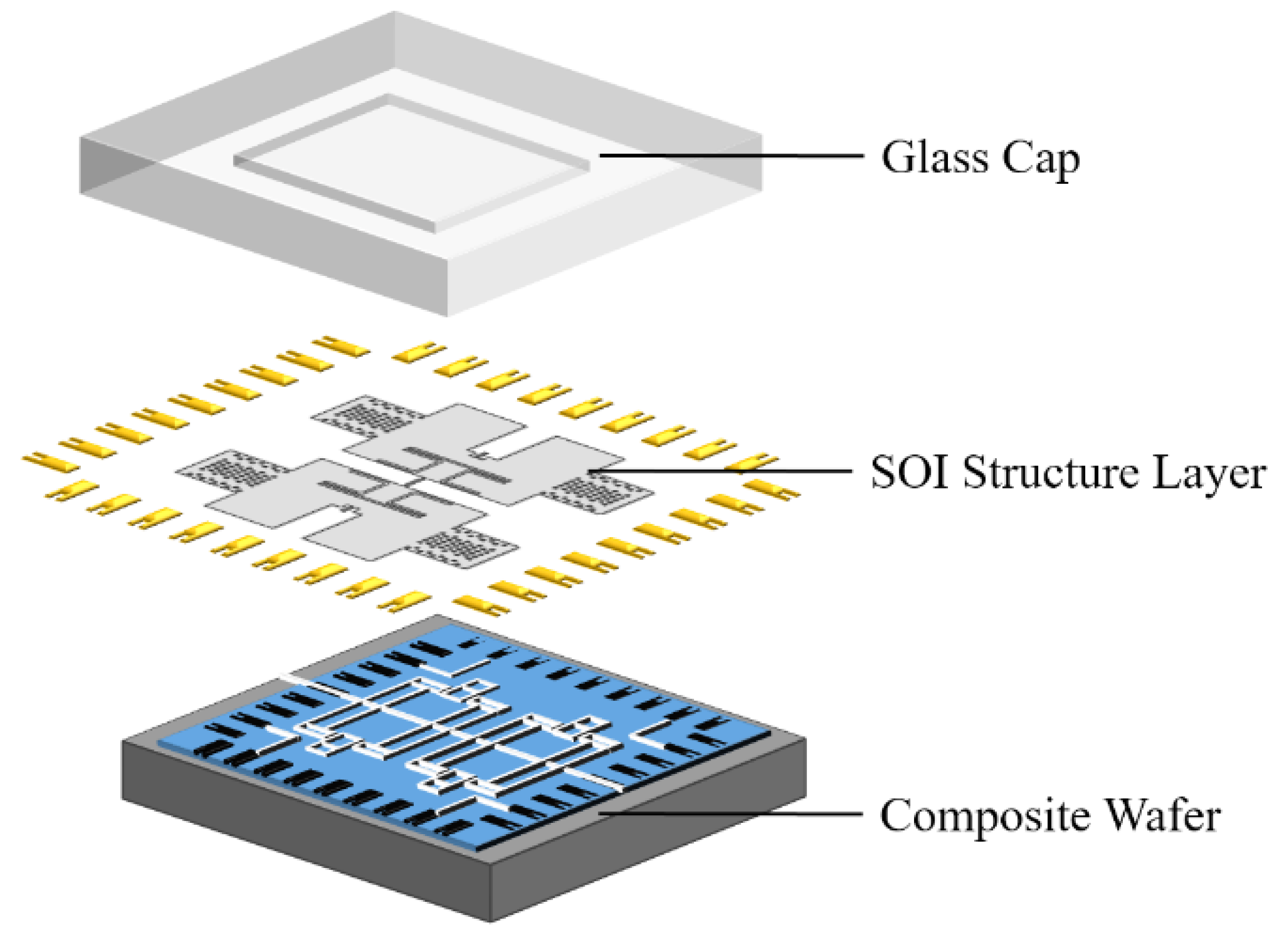
3. Fabrication of BFVG
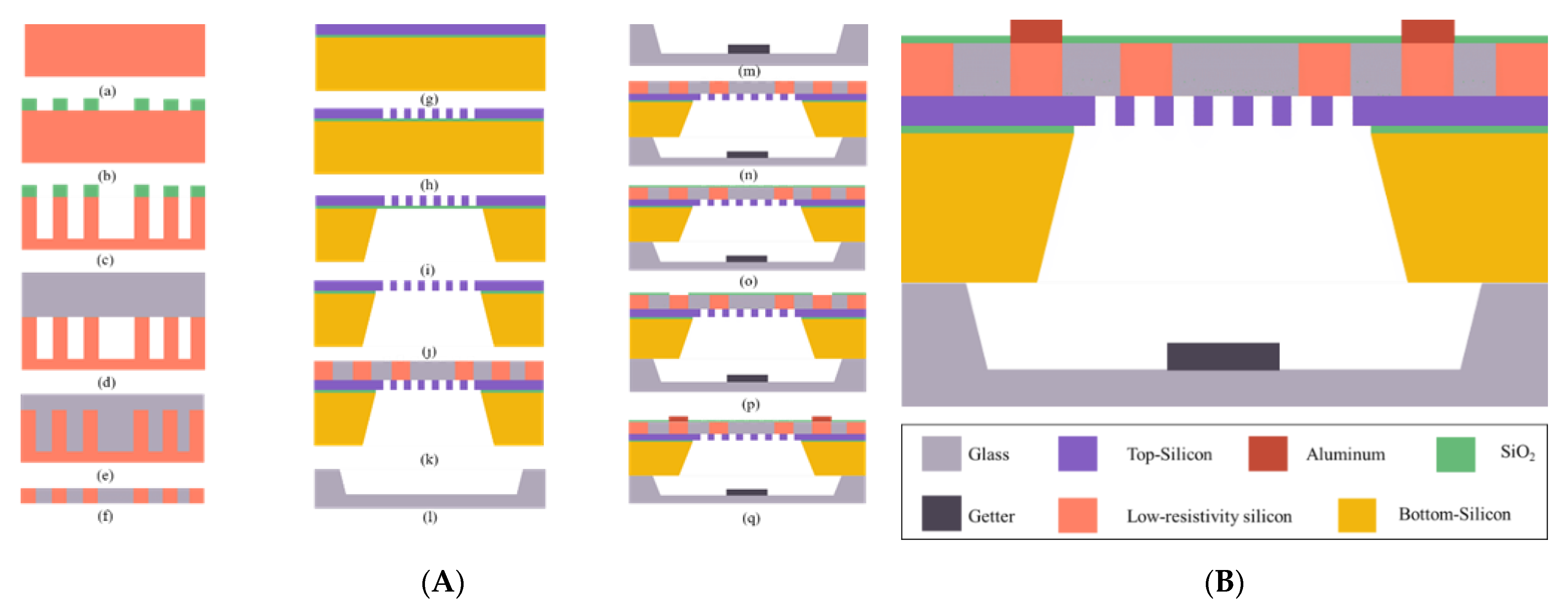
3.1. Novel Manufacturing Technology
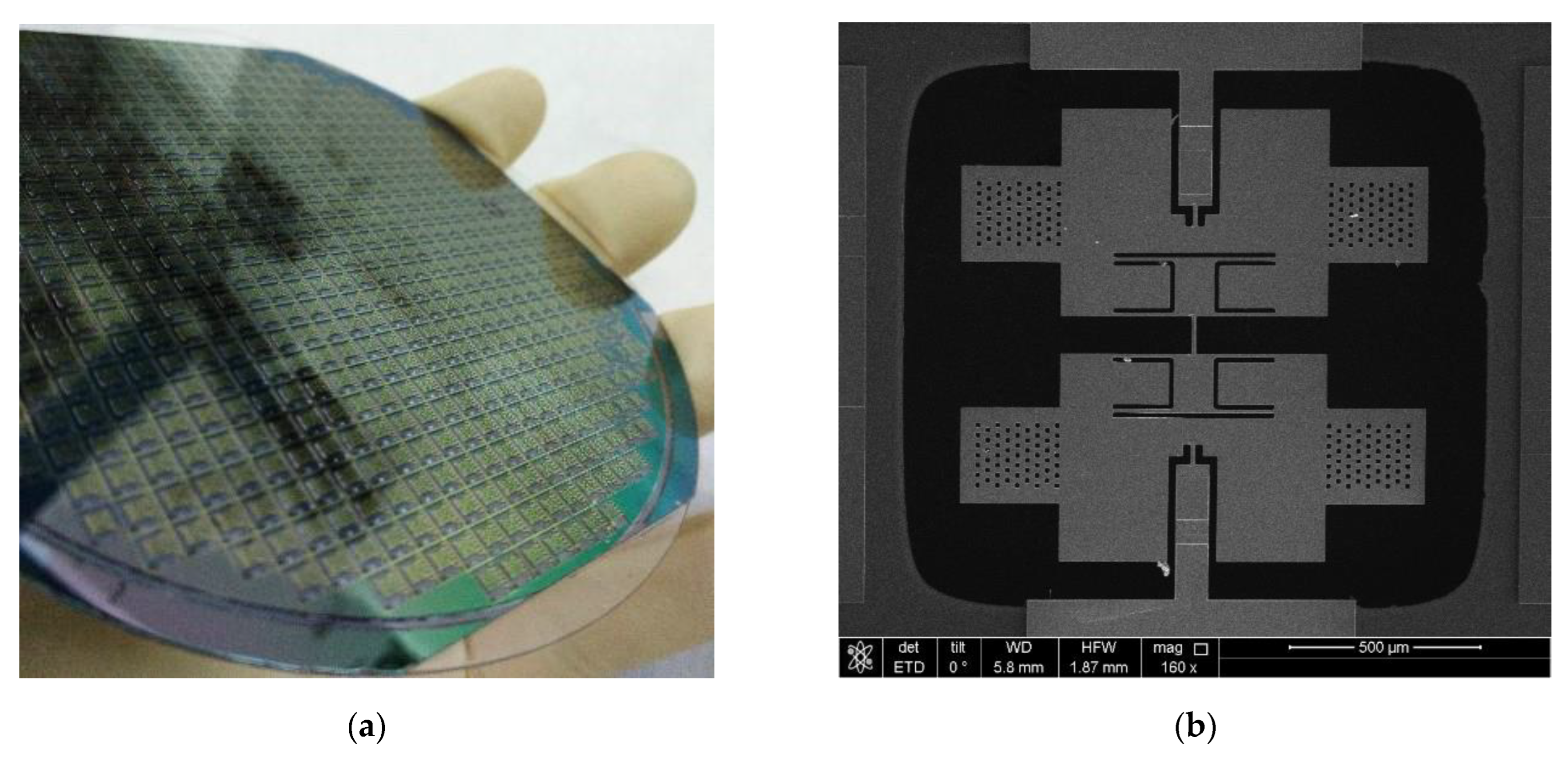
3.2. Fabrication Procedure
4. Characterization and Experimental Results
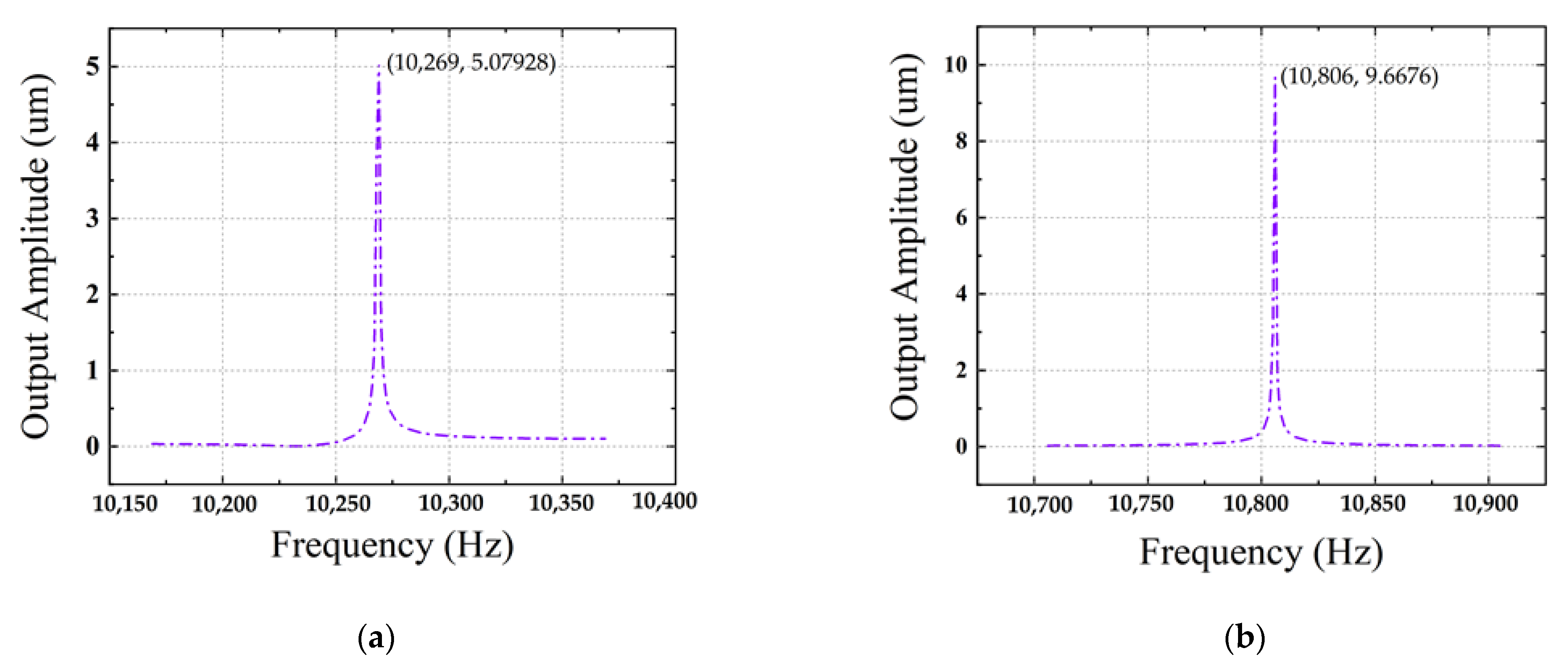
4.1. Frequency Characteristic
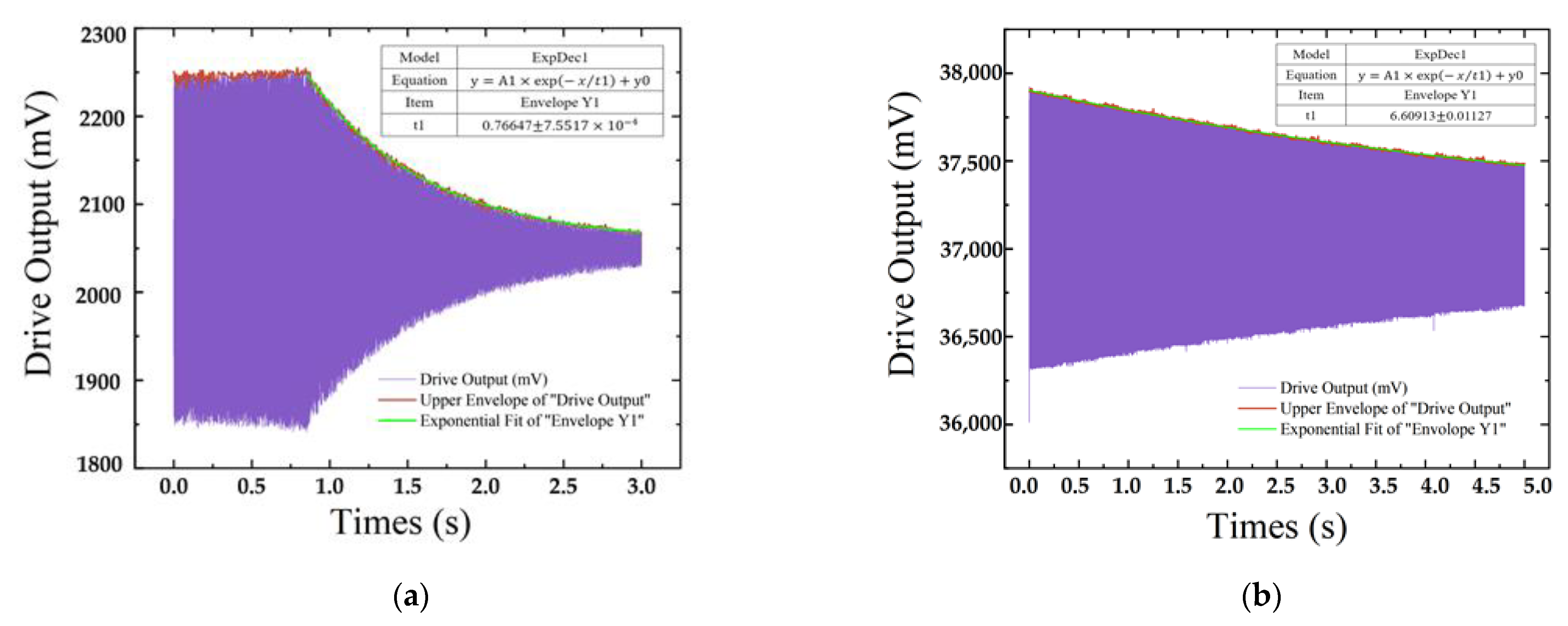
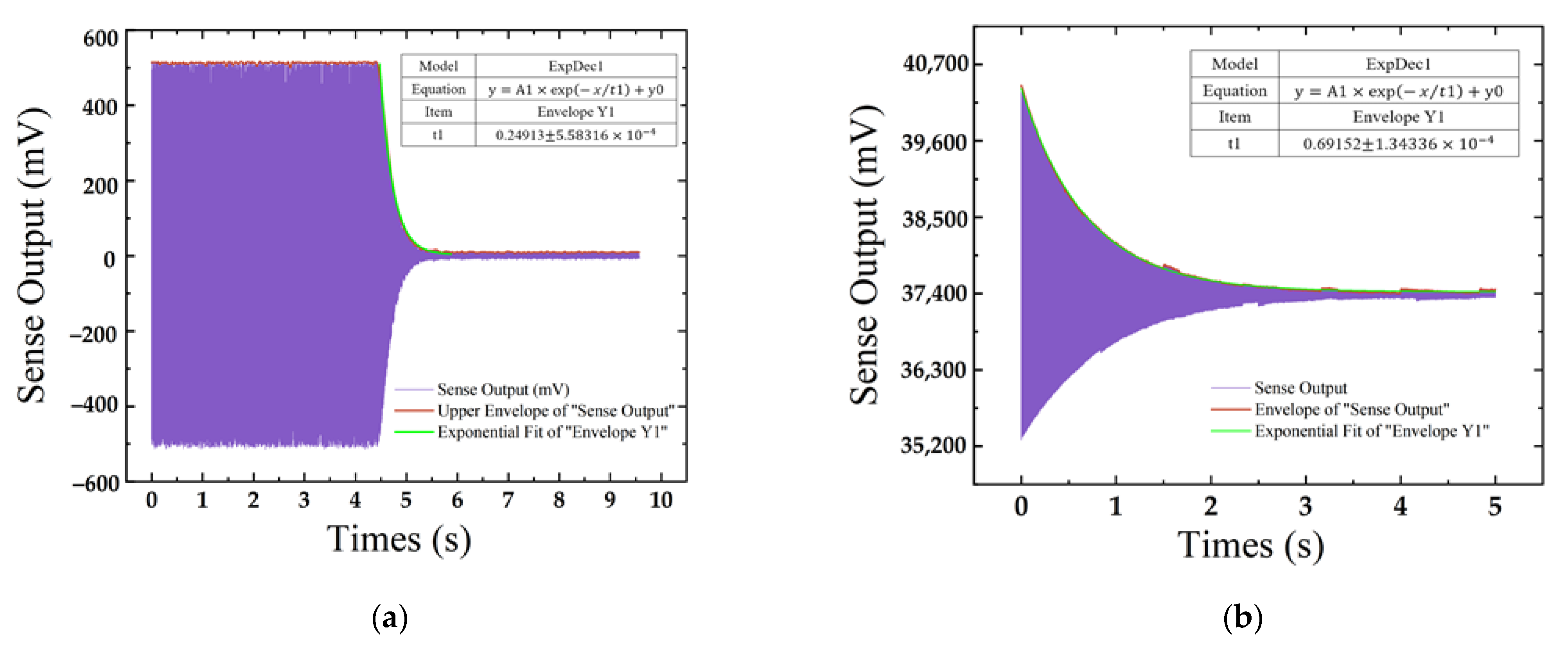
4.2. Time Domain Dynamic Response
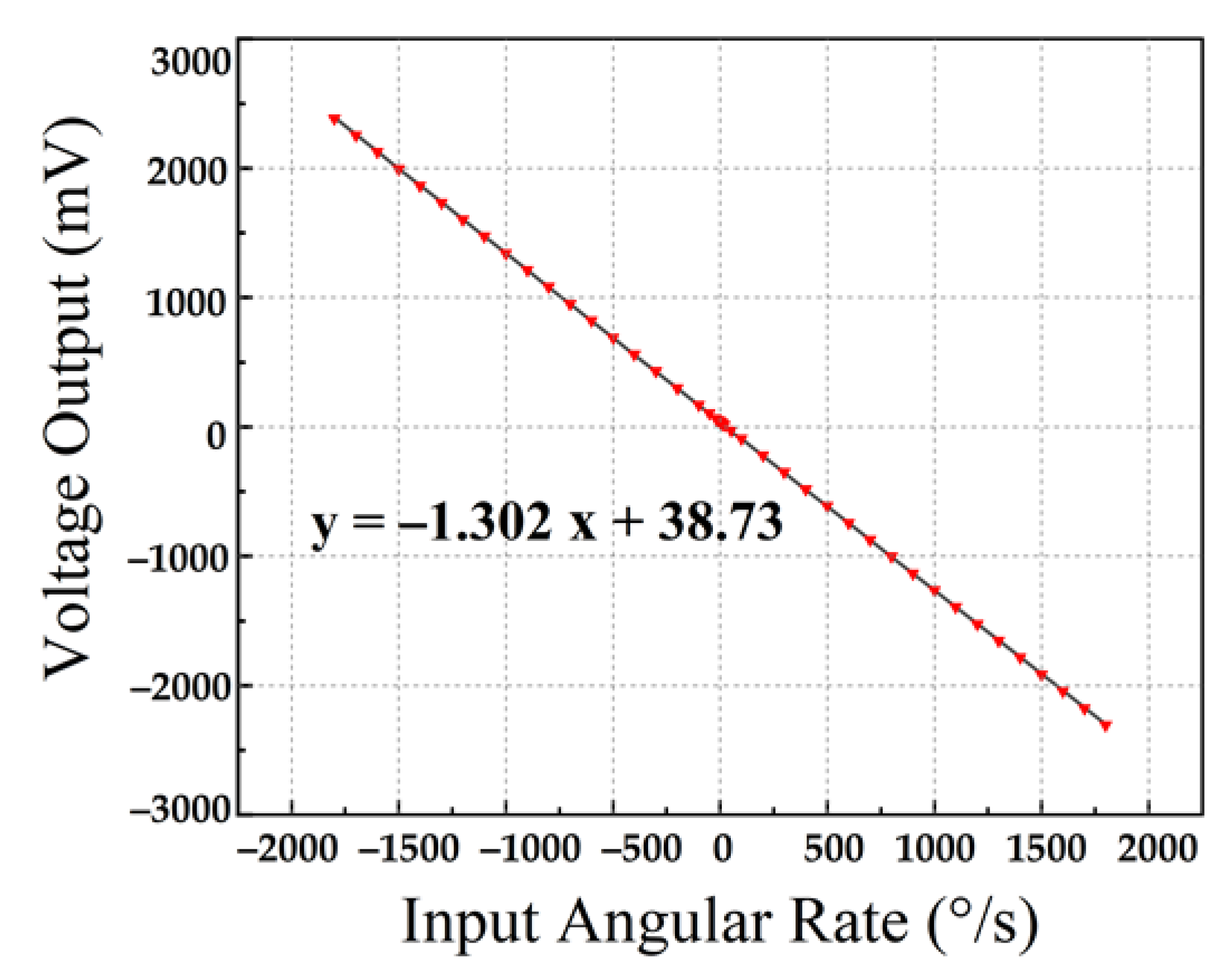
4.3. Full-Scale Range and Nonlinearity
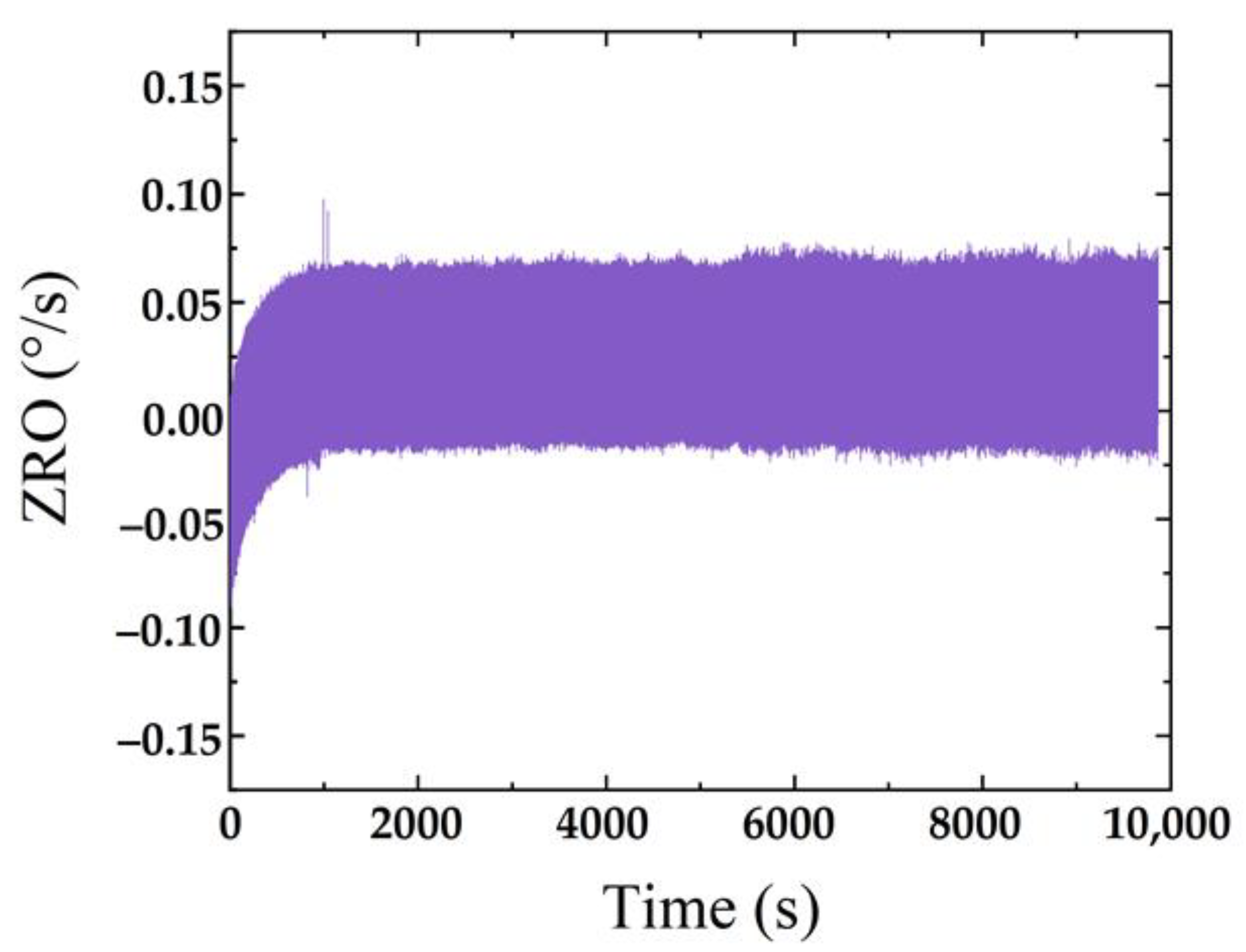
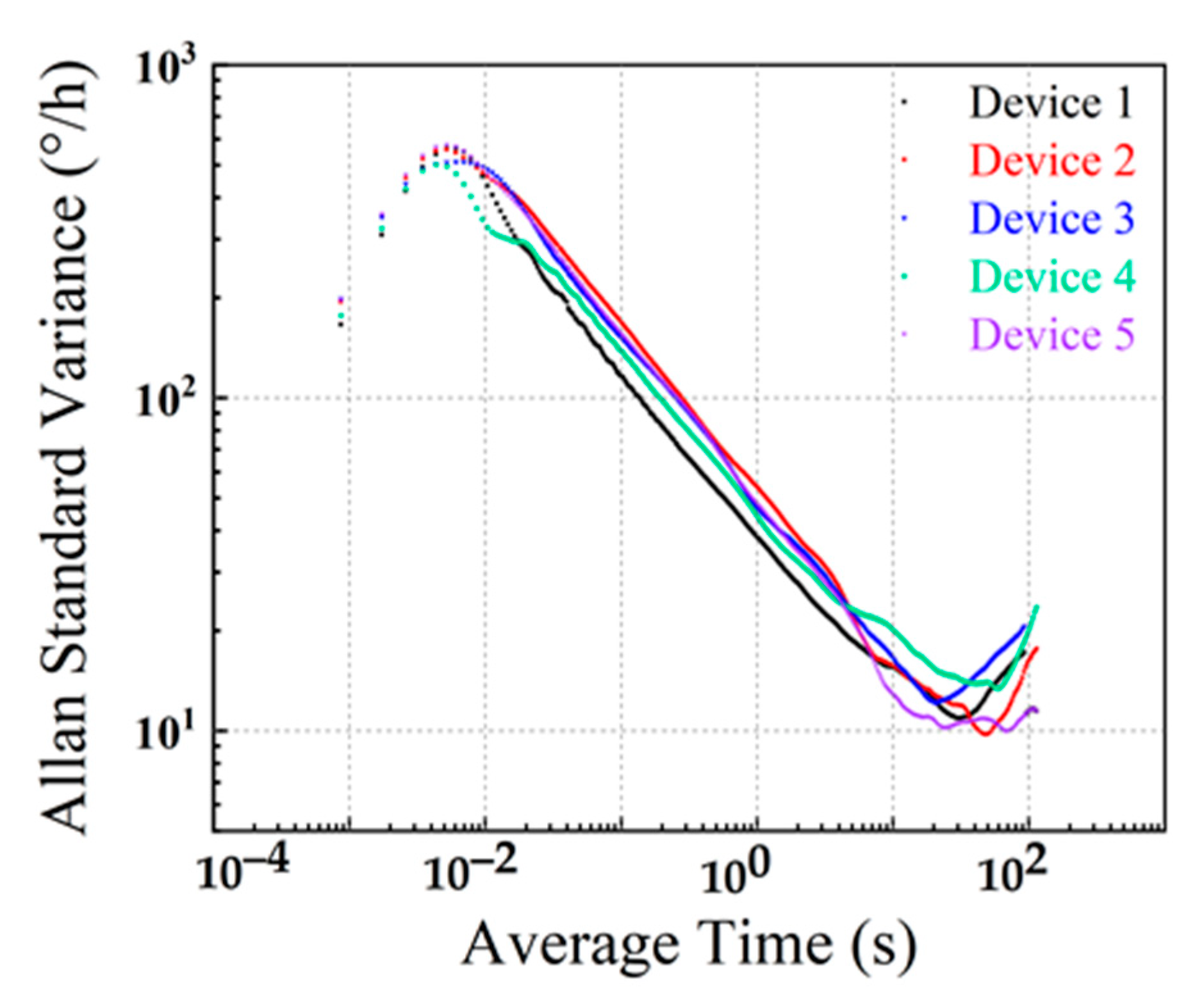
4.4. Stability Test
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Correction Statement
References
- Xiao, D.; Cao, S.; Hou, Z.; Chen, Z.; Wang, X.; Wu, X. Enhanced sensitivity in a butterfly gyroscope with a hexagonal oblique beam. AIP Adv. 2015, 5, 041331. [Google Scholar] [CrossRef]
- Hou, Z.; Kuang, Y.; Ou, F.; Xu, Q.; Miao, T.; Xiao, D.; Wu, X. A quadrature compensation method to improve the performance of the butterfly vibratory gyroscope. Sens. Actuators A Phys. 2021, 319, 112527. [Google Scholar] [CrossRef]
- Lapadatu, D.; Blixhavn, B.; Holm, R.; Kvisterøy, T. SAR500—A high-precision high-stability butterfly gyroscope with north seeking capability. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 6–13. [Google Scholar]
- Su, J.; Xiao, D.; Wang, X.; Chen, Z.; Wu, X. Vibration sensitivity analysis of the ‘Butterfly-gyro’ structure. Microsyst. Technol. 2014, 20, 1281–1290. [Google Scholar] [CrossRef]
- Andersson, G.I.; Hedenstierna, N.; Svensson, P.; Pettersson, H. A Novel Silicon Bulk Gyroscope. J. Ext. Abstr. Transducers 1999, 1, 902–905. [Google Scholar]
- Xu, X.; Xiao, D.; Li, W.; Xu, Q.; Hou, Z.; Wu, X. A Dual-Butterfly Structure Gyroscope. Sensors 2017, 17, 2870. [Google Scholar] [CrossRef] [PubMed]
- Khan, N.; Ahamed, M.J. Design and development of a MEMS butterfly resonator using synchronizing beam and out of plane actuation. Microsyst. Technol. 2020, 26, 1643–1652. [Google Scholar] [CrossRef]
- Hedenstierna, N.; Habibi, S.; Nilsen, S.M.; Kvisteroy, T.; Jensen, G.U. Bulk micromachined angular rate sensor based on the ‘butterfly’-gyro structure, Technical Digest. In Proceedings of the MEMS 2001, 14th IEEE International Conference on Micro Electro Mechanical Systems (Cat. No.01CH37090), Interlaken, Switzerland, 25–25 January 2001; pp. 178–181. [Google Scholar]
- Jeong, C.; Seok, S.; Lee, B.; Kim, H.; Chun, K. A study on resonant frequency and Q factor tunings for MEMS vibratory gyroscopes. J. Micromech. Microeng. 2004, 14, 1530–1536. [Google Scholar] [CrossRef]
- Miao, T.; Hu, X.; Zhou, X.; Wu, X.; Hou, Z.; Xiao, D. A Million-order Effective Quality Factor MEMS Resonator by Mechanical Pumping. In Proceedings of the 2020 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Hiroshima, Japan, 23–26 March 2020; pp. 1–4. [Google Scholar]
- Xu, P.; Si, C.; He, Y.; Wei, Z.; Jia, L.; Han, G.; Ning, J.; Yang, F. A Novel High-Q Dual-Mass MEMS Tuning Fork Gyroscope Based on 3D Wafer-Level Packaging. Sensors 2021, 21, 6428. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Yang, J.; He, Y.; Yang, F.; Yang, F.; Han, G.; Si, C.; Ning, J. Research on a 3D Encapsulation Technique for Capacitive MEMS Sensors Based on through Silicon Via. Sensors 2019, 19, 93. [Google Scholar] [CrossRef] [PubMed]
- Dion, F.; Martel, S.; DeNatale, J. 200mm High performance inertial sensor manufacturing process. In Proceedings of the 2018 IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Lake Como, Italy, 26–29 March 2018; pp. 1–2. [Google Scholar]
- DeNatale, J.; Martel, S.; Dion, F.; Lachance, J. Manufacturing Transition of High-Performance MEMS Gyroscopes. In Proceedings of the 2020 IEEE/ION Position, Location and Navigation Symposium (PLANS), Portland, OR, USA, 20–23 April 2020; pp. 24–26. [Google Scholar]
- He, Y.; Si, C.; Han, G.; Zhao, Y.; Ning, J.; Yang, F. A Novel Fabrication Method for a Capacitive MEMS Accelerometer Based on Glass–Silicon Composite Wafers. Micromachines 2021, 12, 102. [Google Scholar] [CrossRef] [PubMed]
- Zhang, M.; Yang, J.; He, Y.; Yang, F.; Zhao, Y.; Xue, F.; Han, G.; Si, C.; Ning, J. Research on the Protrusions Near Silicon-Glass Interface during Cavity Fabrication. Micromachines 2019, 10, 420. [Google Scholar] [CrossRef] [PubMed]
- Xu, P.; Wei, Z.; Guo, Z.; Jia, L.; Han, G.; Si, C.; Ning, J.; Yang, F. A Real-Time Circuit Phase Delay Correction System for MEMS Vibratory Gyroscopes. Micromachines 2021, 12, 506. [Google Scholar] [CrossRef] [PubMed]
- Zhong, W.; Han, G.; Si, C.; Ning, J.; Yang, F. Fabrication and characterization of an SOI MEMS gyroscope. J. Semicond. 2013, 34, 064004. [Google Scholar] [CrossRef]
- Liu, N.; Su, Y.; Tong, X.; Han, G.; Si, C.; Li, Z.; Ning, J. The effect of parasitic charge on the output stability of MEMS gyroscopes. J. Semicond. 2018, 39, 084002. [Google Scholar] [CrossRef]
- Zhang, Y.; Tan, X.; Chen, W.; Zhang, G.; Liu, X. Study of MEMS packaging technology. In Proceedings of the 2005 6th International Conference on Electronic Packaging Technology, Shenzhen, China, 30 August–2 September 2005; pp. 1–4. [Google Scholar]
- Qiang, X.; Dingbang, X.; Zhanqiang, H.; Ming, Z.; Wenyin, L.; Xiangming, X.; Xuezhong, W. A Novel High-Sensitivity Butterfly Gyroscope Driven by Horizontal Driving Force. IEEE Sens. J. 2019, 19, 2064–2071. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Properties | Value | Unit |
|---|---|---|
| Thickness of structure | 20 | |
| Etching depth of asymmetric coupling beam | 3 | |
| Width of coupling beam | 1 | |
| Length of coupling beam | 94 | |
| Etching depth of asymmetric supporting beam | 3 | |
| Width of supporting beam | 1 | |
| Length of supporting beam | 51 | |
| Young’s modulus | 190 | GPa |
| Mass density | 0.023 | kg/cm3 |
| Poisson’s ratio | 0.266 | null |
| Mode | Simulation (Hz) | Experimental (Hz) | Error (%) |
|---|---|---|---|
| drive | 10,269 | 11,192 | 8.989 |
| sense | 10,806 | 11,386 | 5.367 |
| Mode | Ceramic Shell Package | Novel 3D Wafer-Level Package | Improvement (Times) |
|---|---|---|---|
| drive | 26,919 | 232,259 | 8.628 |
| sense | 8902 | 24,740 | 2.779 |
| BFVGs | Manufacture Technology | Mode | Q Value |
|---|---|---|---|
| Nils Hedenstierna [8] | Glass–silicon–glass anodic bonding | drive | 170,000 |
| sense | 1600 | ||
| Xu Qiang [21] | Ceramic shell package | drive | 14,296 |
| sense | 4084 | ||
| J. Su [4] | Certain vacuum package | drive | 16,830 |
| sense | 8052 |
| Devices | ARW (°/√h) | |
|---|---|---|
| device 1 | 1.358 | 10.534 |
| device 2 | 1.586 | 9.789 |
| device 3 | 1.649 | 12.242 |
| device 4 | 1.824 | 13.621 |
| device 5 | 1.281 | 10.061 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jia, L.; Han, G.; Wei, Z.; Si, C.; Ning, J.; Yang, F.; Han, W. A Novel Packaged Ultra-High Q Silicon MEMS Butterfly Vibratory Gyroscope. Micromachines 2022, 13, 1967. https://doi.org/10.3390/mi13111967
Jia L, Han G, Wei Z, Si C, Ning J, Yang F, Han W. A Novel Packaged Ultra-High Q Silicon MEMS Butterfly Vibratory Gyroscope. Micromachines. 2022; 13(11):1967. https://doi.org/10.3390/mi13111967
Chicago/Turabian StyleJia, Lu, Guowei Han, Zhenyu Wei, Chaowei Si, Jin Ning, Fuhua Yang, and Weihua Han. 2022. "A Novel Packaged Ultra-High Q Silicon MEMS Butterfly Vibratory Gyroscope" Micromachines 13, no. 11: 1967. https://doi.org/10.3390/mi13111967