
Mapping Pluvial Flood-Induced Damages with Multi-Sensor Optical Remote Sensing: A Transferable Approach
 , ,
, ,
Abstract
:1. Introduction
2. Materials and Methods
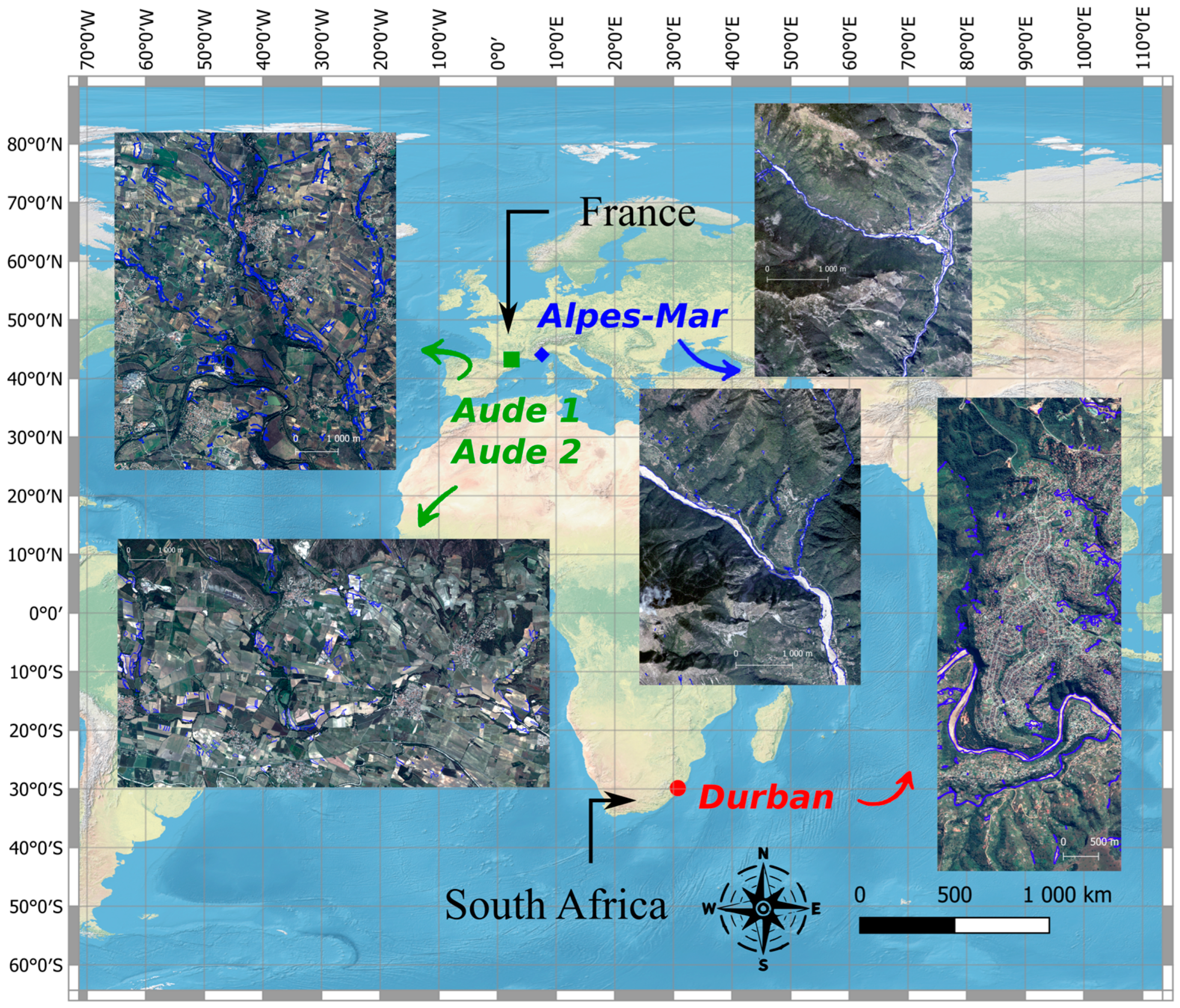
2.1. Study Areas
- Aude 1: Intense precipitations affected the Aude French department on 15 October 2018, with close to 300 mm of rainfall measured around the city of Carcassonne within a day. Up to 250 mm fell locally in only 6 h in this mostly agricultural region [50];
- Aude 2: A weaker event occurred in the same area on 11 May 2020, with up to 175 mm cumulative rainfall measured in two days around the town of Montolieu [51];
- Alpes-Mar: The “Alex” massive storm hit the Alpes-Maritimes French department on 2 October and 3 October 2020. Around 500 mm of rainfall was recorded at Saint-Martin-Vésubie in only a day, and up to 90 mm in just an hour was recorded at the Coursegoules rainfall station. Countless landslides and debris flows were reported in this mountainous region [52];
- Durban: Torrential downpours (~300 mm in 24 h) triggered landslides and mudflows on 11 April and 12 April 2022 on the eastern coast of South Africa near Durban in the KwaZulu-Natal province. The death toll in the surrounding areas exceeded 400 [53].
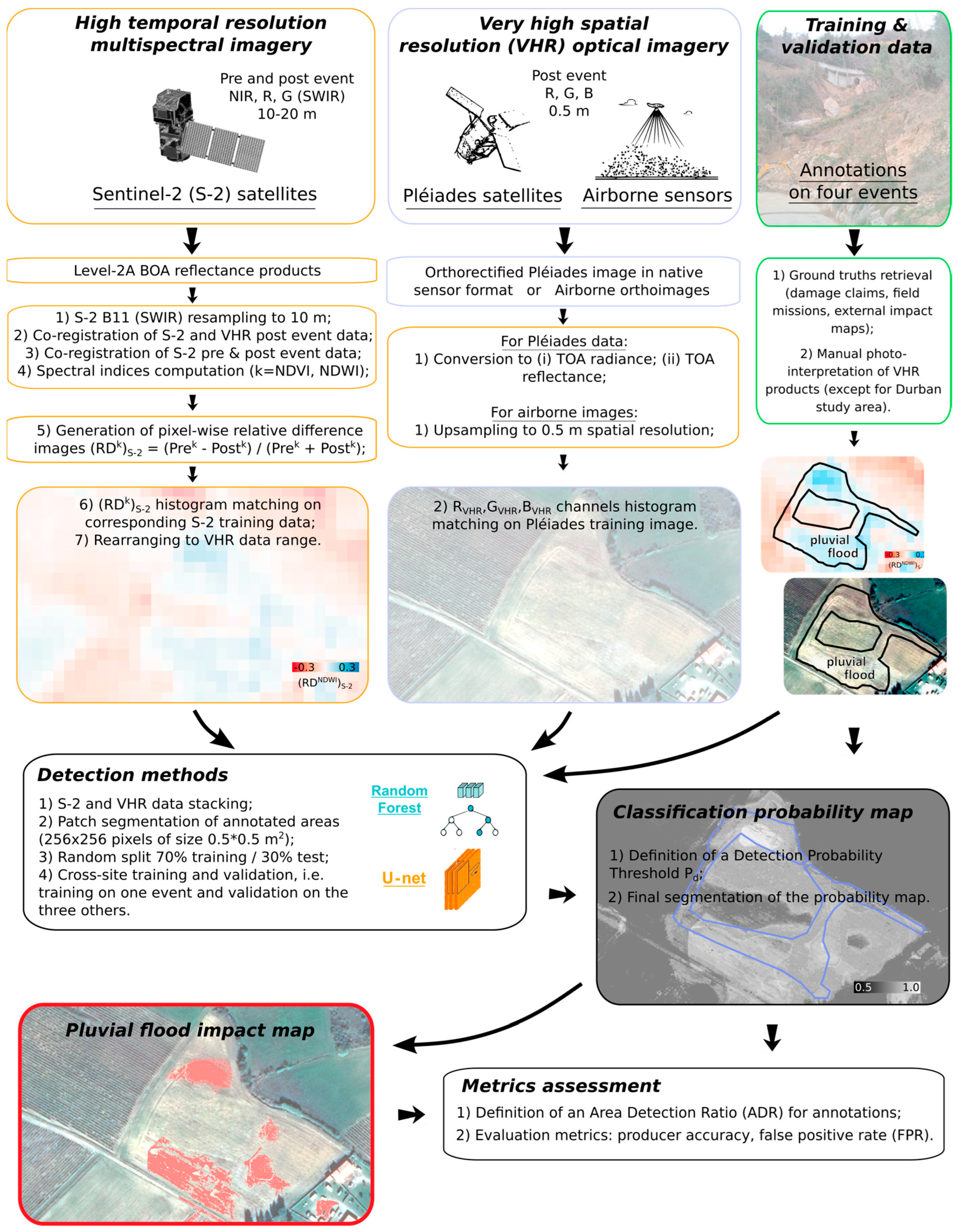
2.2. Remote Sensing Data and Pre-Processing Steps
2.2.1. Post Event Very High Spatial Resolution (VHR) Products
2.2.2. Multispectral Optical Change Images
2.3. Ground Truths Reference Data for Training and Validation
2.4. FuSVIPR: Application and Comparison of Two Concurrent Detection Algorithms for PFs
2.4.1. Random Forest (RF)
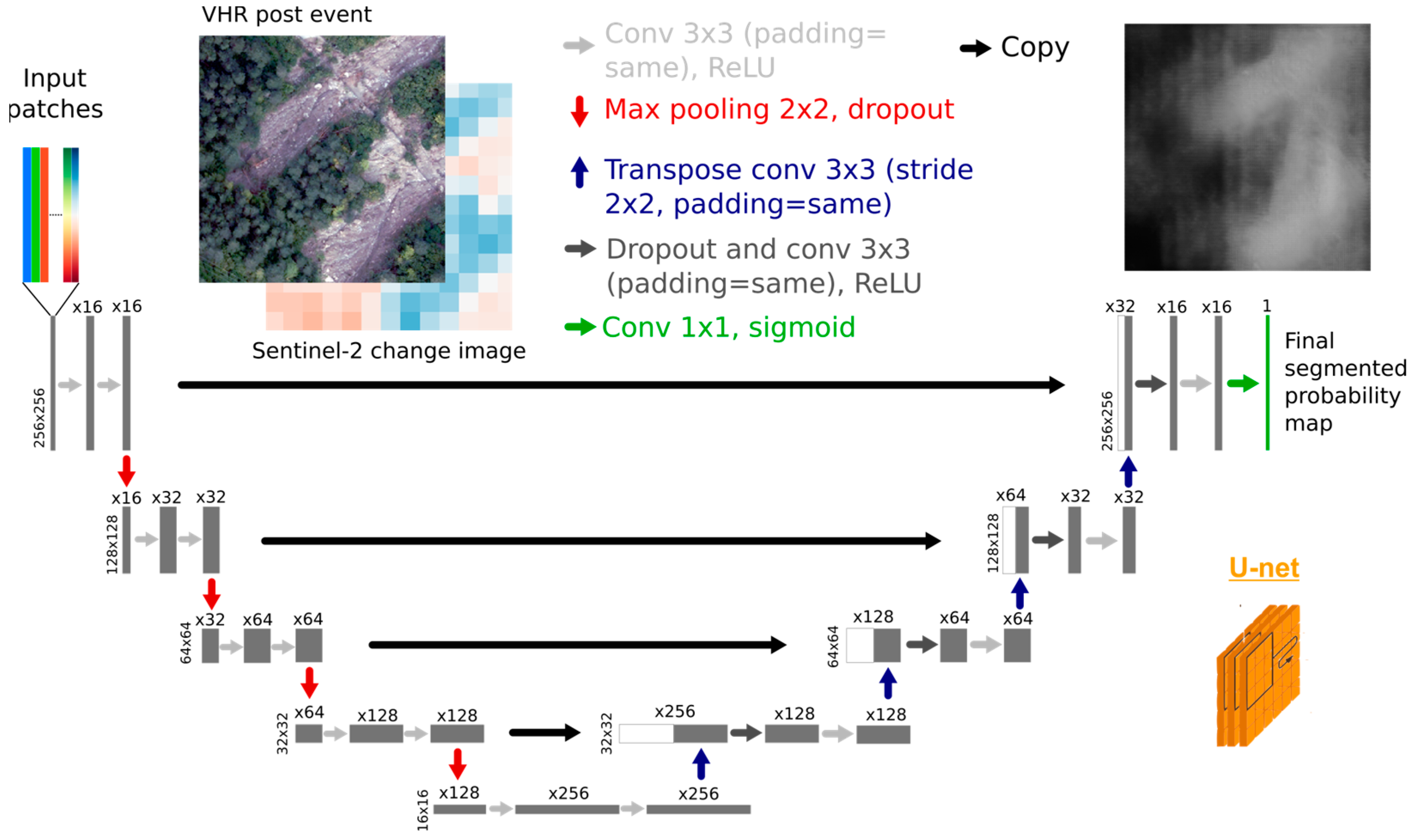
2.4.2. U-Net
2.5. Validation Approach and Metrics
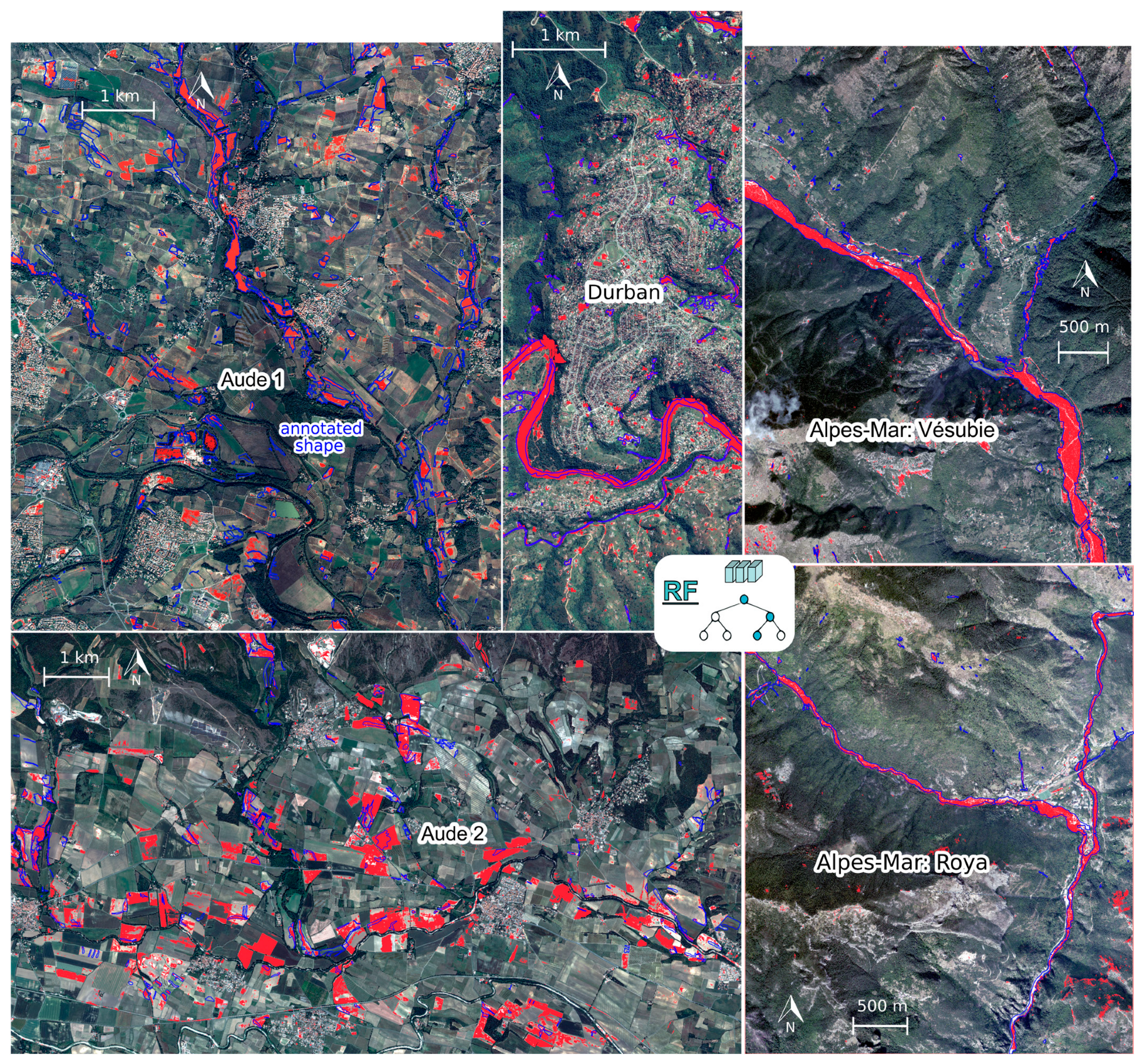
3. Results
3.1. Detection Probability Threshold (Pd) and Area Detection Ratio (ADR)
3.2. Cross Validation Results
4. Discussion
4.1. Detection Extent and False Alarms
4.2. Comparison with the SPCD Method from Cerbelaud et al. [27] and Other Related Approaches
4.3. Random Forest Classifier or U-Net Semantic Segmentation?
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- IPCC. 2022: Summary for Policymakers. In Climate Change 2022: Impacts, Adaptation and Vulnerability; Contribution of Working Group II to the Sixth Assessment Report of the Intergovernmental Panel on Climate Change; Pörtner, H.-O., Roberts, D.C., Tignor, M., Poloczanska, E.S., Mintenbeck, K., Alegría, A., Craig, M., Langsdorf, S., Löschke, S., Möller, V., et al., Eds.; Cambridge University Press: Cambridge, UK; New York, NY, USA, 2022; pp. 3–33. [Google Scholar] [CrossRef]
- Jenkins, K.; Surminski, S.; Hall, J.; Crick, F. Assessing surface water flood risk and management strategies under future climate change: Insights from an Agent-Based Model. Sci. Total Environ. 2017, 595, 159–168. [Google Scholar] [CrossRef]
- Ebi, K.L.; Vanos, J.; Baldwin, J.W.; Bell, J.E.; Hondula, D.M.; Errett, N.A.; Hayes, K.; Reid, C.E.; Saha, S.; Spector, J.; et al. Extreme Weather and Climate Change: Population Health and Health System Implications. Annu. Rev. Public Health 2021, 42, 293–315. [Google Scholar] [CrossRef]
- Gudmundsson, L.; Boulange, J.; Do, H.X.; Gosling, S.N.; Grillakis, M.G.; Koutroulis, A.G.; Leonard, M.; Liu, J.; Schmied, H.M.; Papadimitriou, L.; et al. Globally observed trends in mean and extreme river flow attributed to climate change. Science 2021, 371, 1159–1162. [Google Scholar] [CrossRef] [PubMed]
- Fowler, H.J.; Ali, H.; Allan, R.P.; Ban, N.; Barbero, R.; Berg, P.; Blenkinsop, S.; Cabi, N.S.; Chan, S.; Dale, M.; et al. Towards advancing scientific knowledge of climate change impacts on short-duration rainfall extremes. Phil. Trans. R. Soc. A 2021, 379, 20190542. [Google Scholar] [CrossRef] [PubMed]
- Cerbelaud, A.; Breil, P.; Blanchet, G.; Roupioz, L.; Briottet, X. Proxy data of surface water floods in rural areas: Application to the evaluation of the IRIP intense runoff mapping method based on satellite remote sensing and rainfall radar. Water 2022, 14, 393. [Google Scholar] [CrossRef]
- Moncoulon, D.; Labat, D.; Ardon, J.; Leblois, E.; Onfroy, T.; Poulard, C.; Aji, S.; Rémy, A.; Quantin, A. Analysis of the French insurance market exposure to floods: A stochastic model combining river overflow and surface runoff. Nat. Hazards Earth Syst. Sci. 2014, 14, 2469–2485. [Google Scholar] [CrossRef]
- Bernet, D.B.; Prasuhn, V.; Weingartner, R. Surface water floods in Switzerland: What insurance claim records tell us about the damage in space and time. Nat. Hazards Earth Syst. Sci. 2017, 17, 1659–1682. [Google Scholar] [CrossRef]
- Speight, L.J.; Cranston, M.D.; White, C.J.; Kelly, L. Operational and emerging capabilities for surface water flood forecasting. WIREs Water 2021, 8, e1517. [Google Scholar] [CrossRef]
- Li, C.; Handwerger, A.L.; Wang, J.; Yu, W.; Li, X.; Finnegan, N.J.; Xie, Y.; Buscarnera, G.; Horton, D.E. Augmentation of WRF-Hydro to simulate overland-flow- and streamflow-generated debris flow susceptibility in burn scars. Nat. Hazards Earth Syst. Sci. 2022, 22, 2317–2345. [Google Scholar] [CrossRef]
- Dehotin, J.; Breil, P. Technical Report of the IRIP Project: Surface Runoff Flood Hazard Mapping; Technical Report; IRSTEA Hydrology-Hydraulic Research Unit: Lyon, France, 2011. [Google Scholar]
- Kim, J.-C.; Lee, S.; Jung, H.-S.; Lee, S. Landslide susceptibility mapping using random forest and boosted tree models in Pyeong-Chang, Korea. Geocarto Int. 2018, 33, 1000–1015. [Google Scholar] [CrossRef]
- Costache, R.; Barbulescu, A.; Pham, Q.B. Integrated Framework for Detecting the Areas Prone to Flooding Generated by Flash-Floods in Small River Catchments. Water 2021, 13, 758. [Google Scholar] [CrossRef]
- Costache, R.; Tin, T.T.; Arabameri, A.; Crăciun, A.; Ajin, R.S.; Costache, I.; Islam, A.R.; Abba, S.I.; Sahana, M.; Avand, M.; et al. Flash-flood hazard using deep learning based on H2O R package and fuzzy-multicriteria decision-making analysis. J. Hydrol. 2022, 609, 127747. [Google Scholar] [CrossRef]
- Ouma, Y.O.; Lottering, L.; Tateishi, R. Soil Erosion Susceptibility Prediction in Railway Corridors Using RUSLE, Soil Degradation Index and the New Normalized Difference Railway Erosivity Index (NDReLI). Remote Sens. 2022, 14, 348. [Google Scholar] [CrossRef]
- Gatto, M.P.A.; Montrasio, L. X-SLIP: A SLIP-based multi-approach algorithm to predict the spatial–temporal triggering of rainfall-induced shallow landslides over large areas. Comput. Geotech. 2023, 105175. [Google Scholar] [CrossRef]
- Salvatici, T.; Tofani, V.; Rossi, G.; D’Ambrosio, M.; Tacconi Stefanelli, C.; Masi, E.B.; Rosi, A.; Pazzi, V.; Vannocci, P.; Petrolo, M.; et al. Application of a physically based model to forecast shallow landslides at a regional scale. Nat. Hazards Earth Syst. Sci. 2018, 18, 1919–1935. [Google Scholar] [CrossRef]
- Yu, D.; Coulthard, T.J. Evaluating the importance of catchment hydrological parameters for urban surface water flood modelling using a simple hydro-inundation model. J. Hydrol. 2015, 524, 385–400. [Google Scholar] [CrossRef]
- Rahman, M.S.; Di, L. The state of the art of spaceborne remote sensing in flood management. Nat. Hazards 2017, 85, 1223–1248. [Google Scholar] [CrossRef]
- Munawar, H.S.; Hammad, A.W.A.; Waller, S.T. Remote Sensing Methods for Flood Prediction: A Review. Sensors 2022, 22, 960. [Google Scholar] [CrossRef] [PubMed]
- Byun, Y.; Han, Y.; Chae, T. Image Fusion-Based Change Detection for Flood Extent Extraction Using Bi-Temporal Very High-Resolution Satellite Images. Remote Sens. 2015, 7, 10347–10363. [Google Scholar] [CrossRef]
- Li, Y.; Martinis, S.; Wieland, M. Urban flood mapping with an active self-learning convolutional neural network based on TerraSAR-X intensity and interferometric coherence. ISPRS J. Photogramm. Remote Sens. 2019, 152, 178–191. [Google Scholar] [CrossRef]
- Goffi, A.; Stroppiana, D.; Brivio, P.A.; Bordogna, G.; Boschetti, M. Towards an automated approach to map flooded areas from Sentinel-2 MSI data and soft integration of water spectral features. Int. J. Appl. Earth Obs. Geoinf. 2020, 84, 101951. [Google Scholar] [CrossRef]
- Kocaman, S.; Tavus, B.; Nefeslioglu, H.A.; Karakas, G.; Gokceoglu, C. Evaluation of Floods and Landslides Triggered by a Meteorological Catastrophe (Ordu, Turkey, August 2018) Using Optical and Radar Data. Geofluids 2020, 8830661, 18. [Google Scholar] [CrossRef]
- Shahabi, H.; Shirzadi, A.; Ghaderi, K.; Omidvar, E.; Al-Ansari, N.; Clague, J.J.; Geertsema, M.; Khosravi, K.; Amini, A.; Bahrami, S.; et al. Flood Detection and Susceptibility Mapping Using Sentinel-1 Remote Sensing Data and a Machine Learning Approach: Hybrid Intelligence of Bagging Ensemble Based on K-Nearest Neighbor Classifier. Remote Sens. 2020, 12, 266. [Google Scholar] [CrossRef]
- Tavus, B.; Kocaman, S.; Gokceoglu, C. Flood damage assessment with Sentinel-1 and Sentinel-2 data after Sardoba dam break with GLCM features and Random Forest method. Sci. Total Environ. 2022, 816, 151585. [Google Scholar] [CrossRef]
- Cerbelaud, A.; Roupioz, L.; Blanchet, G.; Breil, P.; Briottet, X. A repeatable change detection approach to map extreme storm-related damages caused by intense surface runoff based on optical and SAR remote sensing: Evidence from three case studies in the South of France. ISPRS J. Photogramm. Remote Sens. 2021, 182, 153–175. [Google Scholar] [CrossRef]
- Cerbelaud, A.; Favro, A.; Roupioz, L.; Blanchet, G.; Briottet, X.; Delvit, J.-M.; Breil, P. Potential of high resolution satellite optical imagery to detect damages following extreme rainfall events. La Houille Blanche 2020, 6, 66–74. [Google Scholar] [CrossRef]
- Dhakal, A.S.; Amada, T.; Aniya, M.; Sharma, R.R. Detection of areas associated with flood and erosion caused by a heavy rainfall using multitemporal Landsat TM data. Photogramm. Eng. Remote Sens. 2002, 68, 233–239. [Google Scholar]
- Heleno, S.; Matias, M.; Pina, P.; Sousa, A.J. Semiautomated object-based classification of rain-induced landslides with VHR multispectral images on Madeira Island. Nat. Hazards Earth Syst. Sci. 2016, 16, 1035–1048. [Google Scholar] [CrossRef]
- Yokoya, N.; Yamanoi, K.; He, W.; Baier, G.; Adriano, B.; Miura, H.; Oishi, S. Breaking Limits of Remote Sensing by Deep Learning from Simulated Data for Flood and Debris-Flow Mapping. IEEE Trans. Geosci. Remote Sens. 2020, 60, 4400115. [Google Scholar] [CrossRef]
- Cerbelaud, A.; Roupioz, L.; Blanchet, G.; Breil, P.; Briottet, X. Supervised classification methods for automatic damage detection caused by heavy rainfall using multitemporal high resolution optical imagery and auxiliary data. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2021, 693–700. [Google Scholar] [CrossRef]
- Proy, C.; Tinel, C.; Fontannaz, D. Pleiades in the context of the International Charter “Space and Major Disasters”. In Proceedings of the 2013 IEEE International Geoscience and Remote Sensing Symposium—IGARSS, Melbourne, VIC, Australia, 21–26 July 2013; pp. 4530–4533. [Google Scholar] [CrossRef]
- Yésou, H.; Chastanet, P.; Maxant, J.; Huber, C.; Clandillon, S.; Battiston, S.; Proy, C.; de Fraipont, P. Contribution de l’imagerie Pléiades à la cartographie rapide des dégâts suite à des catastrophes majeures: Retours d’expériences après deux ans d’actions de cartographie rapide localisées en Asie, en Afrique, en Europe et aux Caraïbes. Rev. Fr. Photogramm. Télédétection 2015, 209, 81–87. [Google Scholar] [CrossRef]
- Yésou, H.; Escudier, A.; Battiston, S.; Dardillac, J.-Y.; Clandillon, S.; Uribe, C.; Caspard, M.; Giraud, H.; Maxant, J.; Durand, A.; et al. Exploitation de l’imagerie Pléiades-THR en cartographie réactive suite à des catastrophes naturelles ayant affecté le territoire français en 2013. Rev. Fr. Photogramm. Télédétection 2015, 209, 39–45. [Google Scholar] [CrossRef]
- Chen, A.; Darbon, J.; De Franchis, C.; Facciolo, G.; Meinhardt, E.; Michel, J.; Morel, J.-M. Numerical simulation of landscape evolution and water runoff on digital elevation models obtained from Pleiades. Rev. Fr. Photogramm. Télédétection 2015, 209, 117–123. [Google Scholar] [CrossRef]
- Huang, F.; Chen, L.; Yin, K.; Huang, J.; Gui, L. Object-oriented change detection and damage assessment using high-resolution remote sensing images, Tangjiao Landslide, Three Gorges Reservoir, China. Environ. Earth Sci. 2018, 77, 183. [Google Scholar] [CrossRef]
- Ghorbanzadeh, O.; Crivellari, A.; Ghamisi, P.; Shahabi, H.; Blaschke, T. A comprehensive transferability evaluation of U-Net and ResU-Net for landslide detection from Sentinel-2 data (case study areas from Taiwan, China, and Japan). Sci. Rep. 2021, 11, 14629. [Google Scholar] [CrossRef] [PubMed]
- Meena, S.R.; Soares, L.P.; Grohmann, C.H.; van Westen, C.; Bhuyan, K.; Singh, R.P.; Floris, M.; Catani, F. Landslide detection in the Himalayas using machine learning algorithms and U-Net. Landslides 2022, 19, 1209–1229. [Google Scholar] [CrossRef]
- Saha, S.; Bovolo, F.; Bruzzone, L. Unsupervised Deep Change Vector Analysis for Multiple-Change Detection in VHR Images. IEEE Trans. Geosci. Remote Sens. 2019, 57, 3677–3693. [Google Scholar] [CrossRef]
- Zhang, C.; Wei, S.; Ji, S.; Lu, M. Detecting Large-Scale Urban Land Cover Changes from Very High Resolution Remote Sensing Images Using CNN-Based Classification. ISPRS Int. J. Geo-Inf. 2019, 8, 189. [Google Scholar] [CrossRef]
- Peng, X.; Zhong, R.; Li, Z.; Li, Q. Optical Remote Sensing Image Change Detection Based on Attention Mechanism and Image Difference. IEEE Trans. Geosci. Remote Sens. 2021, 59, 7296–7307. [Google Scholar] [CrossRef]
- Sun, S.; Mu, L.; Wang, L.; Liu, P. L-UNet: An LSTM Network for Remote Sensing Image Change Detection. IEEE Geosci. Remote Sens. Lett. 2022, 19, 8004505. [Google Scholar] [CrossRef]
- Chen, H.; Qi, Z.; Shi, Z. Remote Sensing Image Change Detection with Transformers. IEEE Trans. Geosci. Remote Sens. 2022, 60, 5607514. [Google Scholar] [CrossRef]
- Ronneberger, O.; Fischer, P.; Brox, T. U-Net: Convolutional Networks for Biomedical Image Segmentation. In Medical Image Computing and Computer-Assisted Intervention—MICCAI 2015. MICCAI 2015. Lecture Notes in Computer Science; Navab, N., Hornegger, J., Wells, W., Frangi, A., Eds.; Springer: Cham, Switzerland, 2015; Volume 9351. [Google Scholar] [CrossRef]
- Brand, A.K.; Manandhar, A. Semantic segmentation of burned areas in satellite images using a U-net-based convolutional neural network. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLIII-B3-2021, 47–53. [Google Scholar] [CrossRef]
- Basnyat, B.; Roy, N.; Gangopadhyay, A. Flood Detection using Semantic Segmentation and Multimodal Data Fusion. In Proceedings of the 2021 IEEE International Conference on Pervasive Computing and Communications Workshops and other Affiliated Events, Kassel, Germany, 22–26 March 2021; pp. 135–140. [Google Scholar] [CrossRef]
- Feng, Y.; Sester, M. Extraction of Pluvial Flood Relevant Volunteered Geographic Information (VGI) by Deep Learning from User Generated Texts and Photos. ISPRS Int. J. Geo Inf. 2018, 7, 39. [Google Scholar] [CrossRef]
- Ho, T.K. Random Decision Forest. In Proceedings of the 3rd International Conference on Document Analysis and Recognition 1995, Montreal, QC, Canada, 14–16 August 1995; pp. 278–282. [Google Scholar]
- Lebouc, L.; Payrastre, O.; Bourgin, F. Reconstitution des Débits de Pointe des Crues du 15 Octobre 2018 Dans le Bassin de L'Aude. Convention DGPR-IFSTTAR 2018 n° 2201132931 du 22 mai 2018—Action 7 Appui au SCHAPI; Rapport de Recherche; IFSTTAR: Versailles, France, 2019; 14p. [Google Scholar]
- Météo-France. Available online: http://pluiesextremes.meteo.fr/france-metropole/Fortes-pluies-sur-le-sud-de-la-France (accessed on 21 April 2023).
- Carrega, P.; Michelot, N. Une catastrophe hors norme d'origine météorologique le 2 octobre 2020 dans les montagnes des Alpes-Maritimes. Physio Géo 2021, 16, 1–70. [Google Scholar] [CrossRef]
- Pinto, I.; Zachariah, M.; Wolski, P.; Landman, S.; Phakula, V.; Maluleke, W.; Bopape, M.-J.; Engelbrecht, C.; Jack, C.; McClure, A.; et al. Climate Change Exacerbated Rainfall Causing Devastating Flooding in Eastern South Africa. World Weather Attribution Science Report. 2022. Available online: https://www.worldweatherattribution.org/wp-content/uploads/WWA-KZN-floods-scientific-report.pdf (accessed on 21 April 2023).
- Hagolle, O.; Huc, M.; Descardins, C.; Auer, S.; Richter, R. MAJA Algorithm Theoretical Basis Document; CERN: Meyrin, Switzerland, 2017. [Google Scholar] [CrossRef]
- Tucker, C.J. Red and photographic infrared linear combinations for monitoring vegetation. Remote Sens. Environ. 1979, 8, 127–150. [Google Scholar] [CrossRef]
- McFeeters, S.K. The use of the Normalized Difference Water Index (NDWI) in the delineation of open water features. Int. J. Remote Sens. 1996, 17, 1425–1432. [Google Scholar] [CrossRef]
- Yésou, H.; Clandillon, S.; Allenbach, B.; Bestault, C.; de Fraipont, P.; Inglada, J.; Favard, J.C. A constellation of advantages with SPOT SWIR and VHR SPOT 5 data for flood extent mapping during the September 2002 Gard event (France). In Proceedings of the IGARSS 2003 IEEE International Geoscience and Remote Sensing Symposium, (IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; pp. 567–569. [Google Scholar] [CrossRef]
- Gao, B.C. NDWI—A normalized difference water index for remote sensing of vegetation liquid water from space. Remote Sens. Environ. 1996, 58, 257–266. [Google Scholar] [CrossRef]
- Wicki, A.; Lehmann, P.; Hauck, C.; Seneviratne, S.I.; Waldner, P.; Stähli, M. Assessing the potential of soil moisture measurements for regional landslide early warning. Landslides 2020, 17, 1881–1896. [Google Scholar] [CrossRef]
- Brigot, G.; Colin-Koeniguer, E.; Plyer, A.; Janez, F. Adaptation and Evaluation of an Optical Flow Method Applied to Coregistration of Forest Remote Sensing Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2016, 9, 2923–2939. [Google Scholar] [CrossRef]
- Breiman, L.; Friedman, J.H.; Olshen, R.A.; Stone, C.J. Classification and Regression Trees, 1st ed.; Routledge: Oxfordshire, UK, 1984. [Google Scholar] [CrossRef]
- Pelletier, C.; Valero, S.; Inglada, J.; Champion, N.; Dedieu, G. Assessing the robustness of Random Forests to map land cover with high resolution satellite image time series over large areas. Remote Sens. Environ. 2016, 187, 156–168. [Google Scholar] [CrossRef]
- Rüetschi, M.; Small, D.; Waser, L.T. Rapid Detection of Windthrows Using Sentinel-1 C-Band SAR Data. Remote Sens. 2019, 11, 115. [Google Scholar] [CrossRef]
- Du, M.; Huang, J.; Wei, P.; Yang, L.; Chai, D.; Peng, D.; Sha, J.; Sun, W.; Huang, R. Dynamic Mapping of Paddy Rice Using Multi-Temporal Landsat Data Based on a Deep Semantic Segmentation Model. Agronomy 2022, 12, 1583. [Google Scholar] [CrossRef]
- Yoo, C.; Han, D.; Im, J.; Bechtel, B. Comparison between convolutional neural networks and random forest for local climate zone classification in mega urban areas using Landsat images. ISPRS J. Photogramm. Remote Sens. 2019, 157, 155–170. [Google Scholar] [CrossRef]
- Sothe, C.; De Almeida, C.M.; Schimalski, M.B.; La Rosa, L.E.C.; Castro, J.D.B.; Feitosa, R.Q.; Dalponte, M.; Lima, C.L.; Liesenberg, V.; Miyoshi, G.T.; et al. Comparative performance of convolutional neural network, weighted and conventional support vector machine and random forest for classifying tree species using hyperspectral and photogrammetric data. GISci. Remote Sens. 2020, 57, 369–394. [Google Scholar] [CrossRef]
- Taghizadeh-Mehrjardi, R.; Mahdianpari, M.; Mohammadimanesh, F.; Behrens, T.; Toomanian, N.; Scholten, T.; Schmidt, K. Multi-task convolutional neural networks outperformed random forest for mapping soil particle size fractions in central Iran. Geoderma 2020, 376, 114552. [Google Scholar] [CrossRef]
- Ge, S.; Zhang, J.; Pan, Y.; Yang, Z.; Zhu, S. Transferable deep learning model based on the phenological matching principle for mapping crop extent. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102451. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Satellite or Airborne Product | Acquisition Dates Event X: Date t | Wavelength Range (nm) | Spatial Resolution | |||
|---|---|---|---|---|---|---|
| Aude 1: 15 October 2018 | Aude 2: 11 May 2020 | Alpes-Mar: 3 October 2020 | Durban: 12 April 2022 | |||
| Pléiades TOA reflectance (VHR) | Post event 2018/11/03 | Post event 2020/05/22 | Post event 2022/04/14 | Panchromatic 480–820 Blue (B0) 450–530 Green (B1) 510–590 Red (B2) 620–700 NIR (B3) 775–915 | 0.7 m (panchromatic) 2.8 m (multispectral) Pan-sharpened to 0.5 m (all bands) | |
| IGN orthophotos (VHR) | Post event Multiple tiles starting 2020/10/05 | Visible (blue, green and red) | ~0.1 m | |||
| Sentinel-2 Level-2A BOA reflectance (High revisit) | Pre event 2018/10/05 (S-2A) Post event 2018/10/25 (S-2A) | Pre event 2020/05/07 (S-2A) Post event 2020/05/20 (S-2A) | Pre event 2020/09/28 (S-2A) Post event 2020/10/08 (S-2A) | Pre event 2022/03/29 (S-2B) Post event 2022/04/28 (S-2B) | Blue (B2) 460–525 Green (B3) 542–578 Red (B4) 650–680 NIR (B8) 780–886 SWIR (B11) 1565–1660 | 10 m for bands B2, B3, B4 and B8 20 m for band B11 |
| Models Are Trained Only on Aude 1 | RVHR, GVHR and BVHR + (RDk)S-2 Indices/Bands k Used for S-2 | OA-Precision-Recall On Test Patches Aude 1 At Pixel Level | Aude 1 | Aude 2 | Alpes-Mar | |||
|---|---|---|---|---|---|---|---|---|
| Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | |||
| Random Forest (Pd = 0.75) | (a) | 84%-49%-32% | 48%-77% | 5.4% | 67%-84% | 6.2% | 77%-100% | 6.6% |
| (b) NDVI, NDWI | 88%-66%-52% | 75%-89% | 2.6% | 73%-87% | 5.2% | 79%-93% | 1.3% | |
| (c) I NDVI, NDWI, SWIR | 89%-68%-54% | 76%-91% | 2.4% | 72%-88% | 5.3% | 79%-95% | 1.7% | |
| U-net CNN (Pd = 0.35) | (a) | 85%-56%-46% | 65%-77% | 3.9% | 65%-86% | 15.1% | 55%-61% | 13.4% |
| (b) NDVI, NDWI | 87%-59%-56% | 67%-77% | 2.0% | 63%-79% | 4.8% | 60%-65% | 8.8% | |
| (c) I NDVI, NDWI, SWIR | 88%-65%-53% | 63%-70% | 1.3% | 76%-88% | 6.8% | 57%-61% | 2.3% | |
| RVHR, GVHR, BVHR + (RDNDVI)S-2, (RDNDWI)S-2 | Training Site | OA-Precision-Recall On Test Patches Same Site as Training At Pixel Level | Aude 1 | Aude 2 | Alpes-Mar | |||
|---|---|---|---|---|---|---|---|---|
| Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | |||
| Random Forest | Aude 1 (Pd = 0.75) 460 shapes 800 patches | 88%-66%-52% | 75%-89% | 2.6% | 73%-87% | 5.2% | 79%-93% | 1.3% |
| Aude 2 (Pd = 0.70) 223 shapes/513 patches | 82%-42%-54% | 62%-87% | 2.9% | 76%-91% | 4.3% | 56%-96% | 1.8% | |
| Alpes-Mar (Pd = 0.70) 205 shapes/414 patches | 94%-79%-89% | 66%-87% | 2.6% | 62%-80% | 4.1% | 91%-98% | 1.4% | |
| U-net CNN | Aude 1 (Pd = 0.35) 460 shapes/800 patches | 87%-59%-56% | 67%-77% | 2.0% | 63%-79% | 4.8% | 60%-65% | 8.8% |
| Aude 2 (Pd = 0.20) 223 shapes/513 patches | 76%-35%-67% | 73%-91% | 5.7% | 82%-91% | 6.5% | 35%-67% | 1.0% | |
| Alpes-Mar (Pd = 0.10) 205 shapes/414 patches | 85%-53%-94% | 66%-77% | 1.9% | 64%-79% | 5.3% | 77%-88% | 2.0% | |
| RVHR, GVHR, BVHR + (RDNDVI)S-2, (RDNDWI)S-2 | OA-Precision-Recall On Test Patches Same Site as Training At Pixel Level | Aude 1 | Aude 2 | Alpes-Mar | Durban | ||||
|---|---|---|---|---|---|---|---|---|---|
| Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | Detection Rates with ADR 25%-5% | FPR | ||
| RF * Aude 1 training (Pd = 0.75) | 88%-66%-52% | 75%-85% | 1.9% | 73%-86% | 4.9% | 77%-86% | 0.6% | 70%-91% | 1.2% |
| U-net Alpes-Mar training (Pd = 0.10) | 85%-53%-94% | 66%-77% | 1.9% | 64%-79% | 5.3% | 77%-88% | 2.0% | 77%-92% | 1.8% |
| Pluvial Flood Deteriorations Types of Detection Method | Method’s Characteristics | Aude 1 | Aude 2 | Alpes-Mar | |||
|---|---|---|---|---|---|---|---|
| Detection Rates | FPR | Detection Rates | FPR | Detection Rates | FPR | ||
| FuSVIPR-RF Aude 1 trained (Pd = 0.75) | (i) Pixel-based (ii) VHR + S-2 (iii) 0.5 m resolution (iv) U-net or RF | 75%-85% (ADR 25%-5%) | 2% | 73%-86% | 5% | 77%-86% | 1% |
| SPCD Aude 1 trained (Pd = 0.50, Table 5a from [27]) | (i) Plot-based (ii) S-2 (+S-1) + land cadastre + land cover (iii) 10 m resolution (iv) GP classifier | 84% (at plot level) | 12% | 74% | 4% | 70% | 1% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cerbelaud, A.; Blanchet, G.; Roupioz, L.; Breil, P.; Briottet, X. Mapping Pluvial Flood-Induced Damages with Multi-Sensor Optical Remote Sensing: A Transferable Approach. Remote Sens. 2023, 15, 2361. https://doi.org/10.3390/rs15092361
Cerbelaud A, Blanchet G, Roupioz L, Breil P, Briottet X. Mapping Pluvial Flood-Induced Damages with Multi-Sensor Optical Remote Sensing: A Transferable Approach. Remote Sensing. 2023; 15(9):2361. https://doi.org/10.3390/rs15092361
Chicago/Turabian StyleCerbelaud, Arnaud, Gwendoline Blanchet, Laure Roupioz, Pascal Breil, and Xavier Briottet. 2023. "Mapping Pluvial Flood-Induced Damages with Multi-Sensor Optical Remote Sensing: A Transferable Approach" Remote Sensing 15, no. 9: 2361. https://doi.org/10.3390/rs15092361