
Passive 3D Imaging Method Based on Photonics Integrated Interference Computational Imaging System

Abstract
:
1. Introduction
2. Materials and Methods
2.1. The Structure of a ‘Chessboard’ Photonic Integrated Interference Imager
2.2. The Relationship between the Complex Coherence Factor Collected by the System and the Target Spatial Frequency, Distance and Working Parameters
2.3. The Influence of the Phase of the Complex Coherence Factor on the Reconstructed Image
2.4. The Workflow of Three-Dimensional Positioning Imaging Method
2.5. Performance Analysis
2.5.1. Working Range
2.5.2. Influencing Factors of Positioning Accuracy
3. Results
3.1. Simulation Subsection
3.1.1. 3D Imaging Results of Single-Distance Target
3.1.2. 3D Imaging Results of the Targets at Different Distances
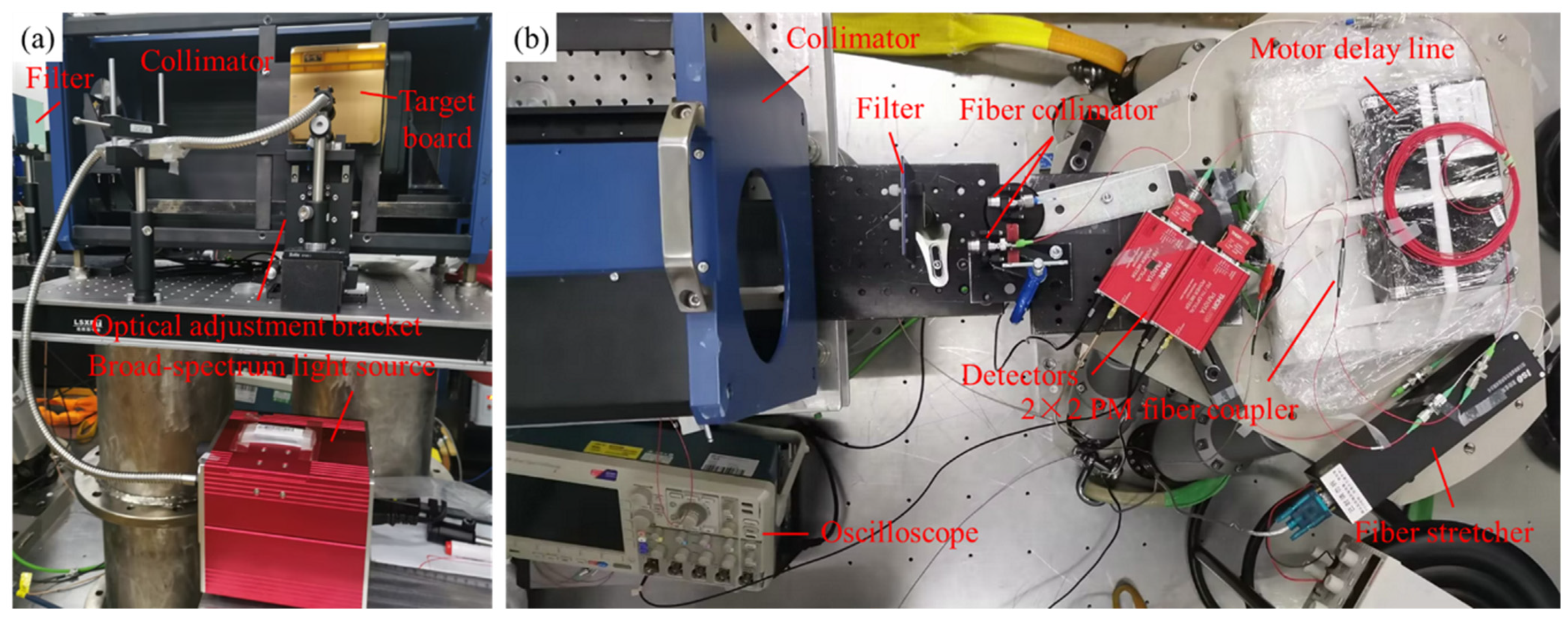
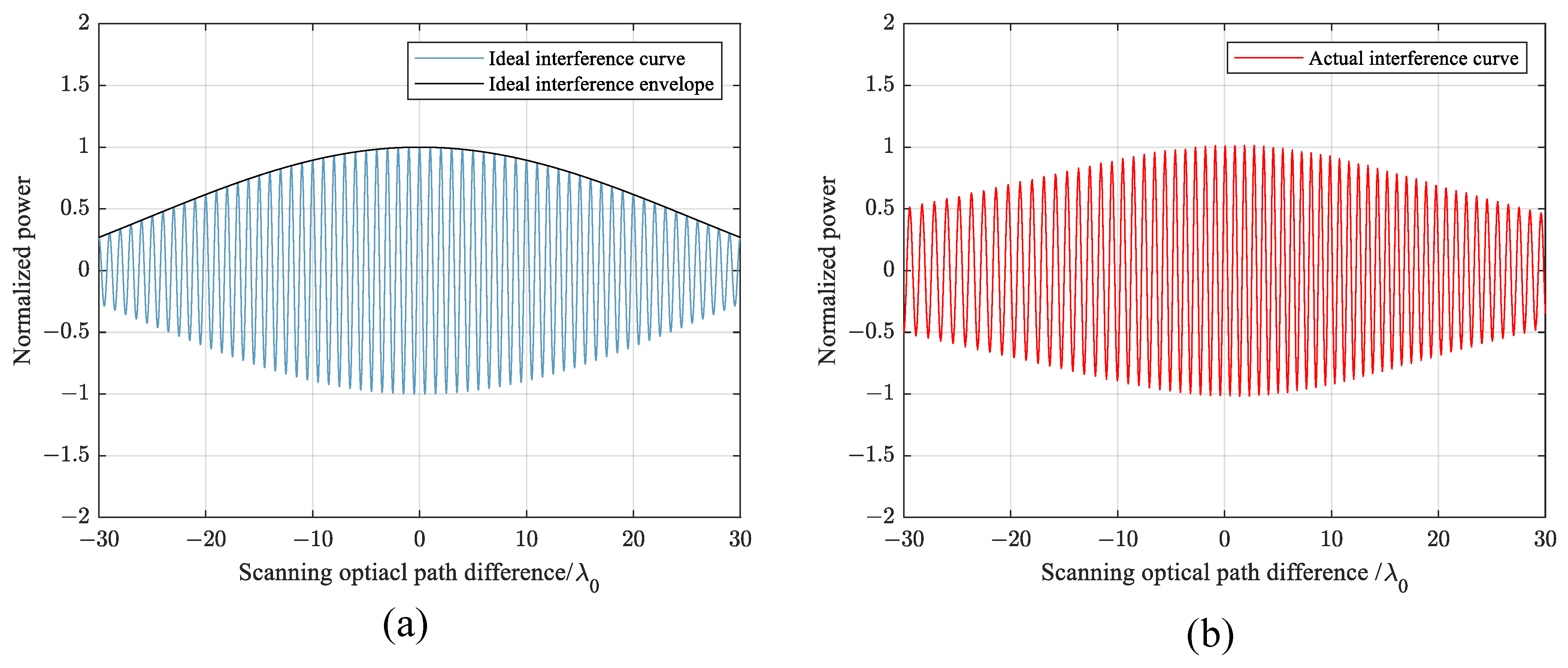
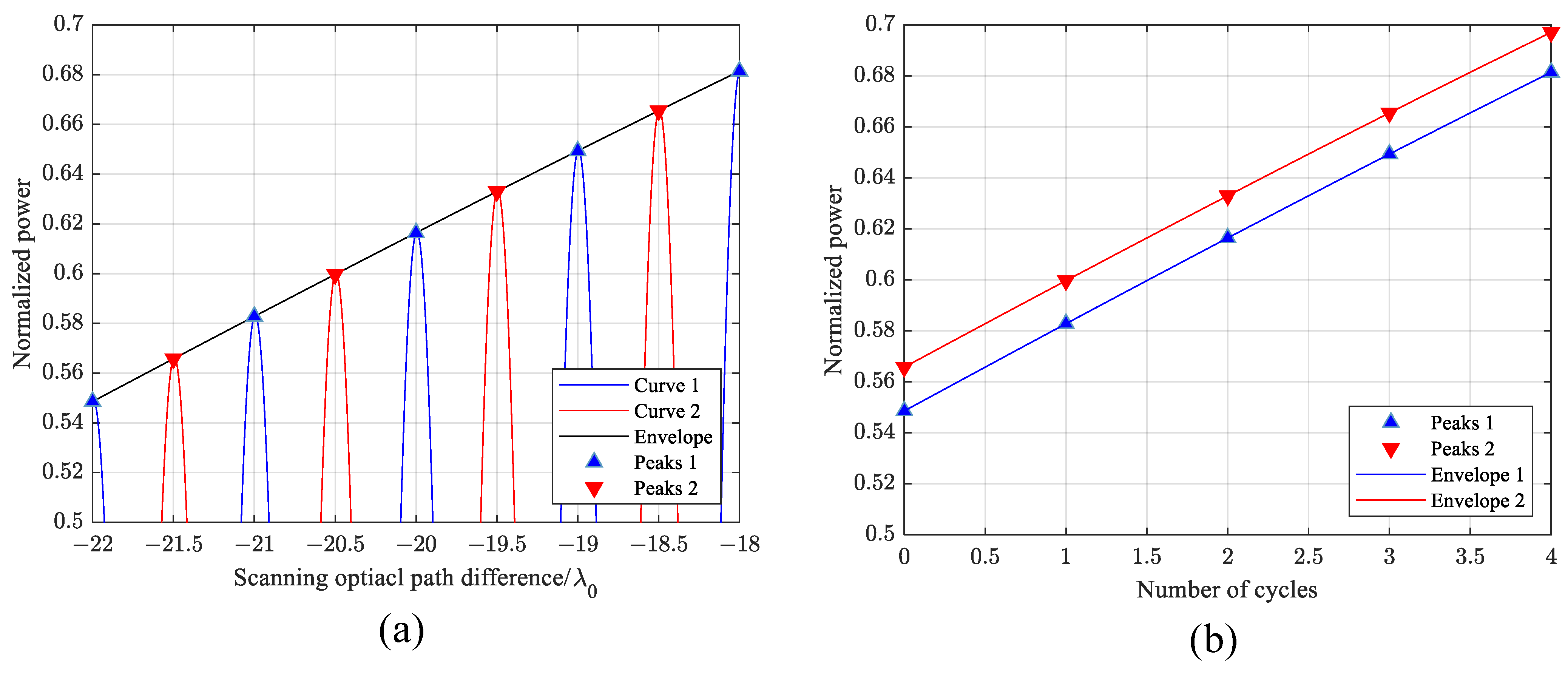
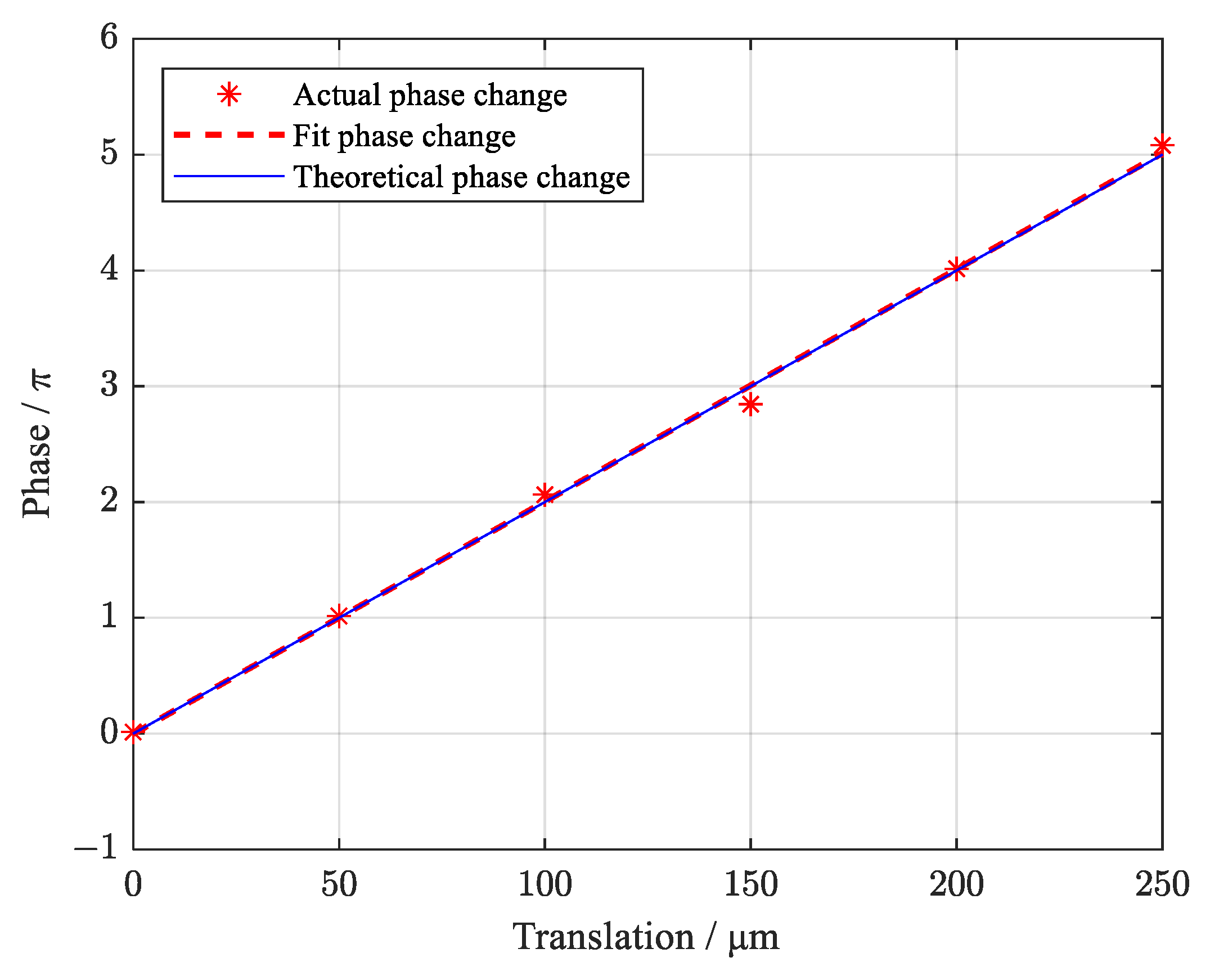
3.2. Experimental Results
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Geng, J. Structured-Light 3D Surface Imaging: A Tutorial. Adv. Opt. Photonics 2011, 3, 128. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, Q.; Feng, S.; Zuo, C. Microscopic Fringe Projection Profilometry: A Review. Opt. Lasers Eng. 2020, 135, 106192. [Google Scholar] [CrossRef]
- Zhang, M.; Chen, Q.; Tao, T.; Feng, S.; Hu, Y.; Li, H.; Zuo, C. Robust and Efficient Multi-Frequency Temporal Phase Unwrapping: Optimal Fringe Frequency and Pattern Sequence Selection. Opt. Express 2017, 25, 20381. [Google Scholar] [CrossRef]
- Li, Z.-P.; Huang, X.; Jiang, P.-Y.; Hong, Y.; Yu, C.; Cao, Y.; Zhang, J.; Xu, F.; Pan, J.-W. Super-Resolution Single-Photon Imaging at 8.2 Kilometers. Opt. Express 2020, 28, 4076. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.-P.; Ye, J.-T.; Huang, X.; Jiang, P.-Y.; Cao, Y.; Hong, Y.; Yu, C.; Zhang, J.; Zhang, Q.; Peng, C.-Z.; et al. Single-Photon Imaging over 200 Km. Optica 2021, 8, 344. [Google Scholar] [CrossRef]
- Zhe, T.; Huang, L.; Wu, Q.; Zhang, J.; Pei, C.; Li, L. Inter-Vehicle Distance Estimation Method Based on Monocular Vision Using 3D Detection. IEEE Trans. Veh. Technol. 2020, 69, 4907–4919. [Google Scholar] [CrossRef]
- Wang, Y.; Wang, X. On-Line Three-Dimensional Coordinate Measurement of Dynamic Binocular Stereo Vision Based on Rotating Camera in Large FOV. Opt. Express 2021, 29, 4986. [Google Scholar] [CrossRef]
- Adil, E.; Mikou, M.; Mouhsen, A. A Novel Algorithm for Distance Measurement Using Stereo Camera. CAAI Trans. Intell. Technol. 2022, 7, 177–186. [Google Scholar] [CrossRef]
- Xingyu, Y.; Yanduo, Z.; Yuechao, Z.; Yuan, Z.; Alang, L.; Xiao, C.; Chunhui, P.; Jianchao, Z.; Yakun, Z.; Xianglan, D. Research on Multi Baseline Large Depth 3D Imaging. In Proceedings of the 2022 International Conference on Computer Engineering and Artificial Intelligence (ICCEAI), Shijiazhuang, China, 22–24 July 2022; pp. 339–343. [Google Scholar]
- Xi, W.; Zuo, X.; Xiao, B.; Zhu, J.; Zhou, D. The Construction and Precision Analysis of the Three—Dimensional Oblique Photogrammetry Model. In Proceedings of the 2021 28th International Conference on Geoinformatics, Nanchang, China, 3 November 2021; pp. 1–5. [Google Scholar]
- Qiu, Y.; Jiao, Y.; Luo, J.; Tan, Z.; Huang, L.; Zhao, J.; Xiao, Q.; Duan, H. A Rapid Water Region Reconstruction Scheme in 3D Watershed Scene Generated by UAV Oblique Photography. Remote Sens. 2023, 15, 1211. [Google Scholar] [CrossRef]
- Kendrick, R.L.; Duncan, A.; Ogden, C.; Wilm, J.; Stubbs, D.M.; Thurman, S.T.; Su, T.; Scott, R.P.; Yoo, S. Flat-Panel Space-Based Space Surveillance Sensor. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies (AMOS) Conference, Maui, HI, USA, 10–13 September 2013. [Google Scholar]
- Thurman, S.T.; Kendrick, R.L.; Duncan, A.; Wuchenich, D.; Ogden, C. System Design for a SPIDER Imager. In Proceedings of the Frontiers in Optics, San Jose, CA, USA, 18–22 October 2015; p. FM3E.3. [Google Scholar]
- Su, T.; Liu, G.; Badham, K.E.; Thurman, S.T.; Kendrick, R.L.; Duncan, A.; Wuchenich, D.; Ogden, C.; Chriqui, G.; Feng, S.; et al. Interferometric Imaging Using Si3N4 Photonic Integrated Circuits for a SPIDER Imager. Opt. Express 2018, 26, 12801. [Google Scholar] [CrossRef]
- Kendrick, R.L.; Duncan, A.; Ogden, C.; Wilm, J.; Thurman, S.T. Segmented Planar Imaging Detector for EO Reconnaissance. In Proceedings of the Imaging and Applied Optics, Arlington, VI, USA, 23–27 June 2013; p. CM4C.1. [Google Scholar]
- Duncan, A.; Kendrick, R.; Thurman, S.; Wuchenich, D.; Scott, R.P.; Yoo, S.; Su, T.; Yu, R.; Ogden, C.; Proiett, R. SPIDER: Next Generation Chip Scale Imaging Sensor. In Proceedings of the Advanced Maui Optical and Space Surveillance Technologies Conference, Maui, HI, USA, 15–18 September 2015; p. 27. [Google Scholar]
- Chu, Q.; Shen, Y.; Yuan, M.; Gong, M. Numerical Simulation and Optimal Design of Segmented Planar Imaging Detector for Electro-Optical Reconnaissance. Opt. Commun. 2017, 405, 288–296. [Google Scholar] [CrossRef]
- Debary, H.; Mugnier, L.M.; Michau, V. Aperture Configuration Optimization for Extended Scene Observation by an Interferometric Telescope. Opt. Lett. 2022, 47, 4056. [Google Scholar] [CrossRef]
- Gao, W.P.; Wang, X.R.; Ma, L.; Yuan, Y.; Guo, D.F. Quantitative Analysis of Segmented Planar Imaging Quality Based on Hierarchical Multistage Sampling Lens Array. Opt. Express 2019, 27, 7955. [Google Scholar] [CrossRef] [PubMed]
- Gao, W.; Yuan, Y.; Wang, X.; Ma, L.; Zhao, Z.; Yuan, H. Quantitative Analysis and Optimization Design of the Segmented Planar Integrated Optical Imaging System Based on an Inhomogeneous Multistage Sampling Lens Array. Opt. Express 2021, 29, 11869. [Google Scholar] [CrossRef]
- Lv, G.; Chen, Y.; Feng, H.; Xu, Z.; Li, Q. System Design for an Improved SPIDER Imager. In Proceedings of the 6th China High Resolution Earth Observation Conference (CHREOC 2019); Wang, L., Wu, Y., Gong, J., Eds.; Lecture Notes in Electrical Engineering; Springer: Singapore, 2020; Volume 657, pp. 241–259. ISBN 9789811539466. [Google Scholar]
- Ming, Z.; Liu, Y.; Li, S.; Zhou, M.; Du, H.; Zhang, X.; Zuo, Y.; Qiu, J.; Wu, J.; Gao, L.; et al. Optimal Design of Segmented Planar Imaging System Based on Rotation and CLEAN Algorithm. Photonics 2023, 10, 46. [Google Scholar] [CrossRef]
- Yong, J.; Feng, Z.; Wu, Z.; Ye, S.; Li, M.; Wu, J.; Cao, C. Photonic Integrated Interferometric Imaging Based on Main and Auxiliary Nested Microlens Arrays. Opt. Express 2022, 30, 29472. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, X.; Liu, X.; Meng, H.; Xu, M. Structure Design and Image Reconstruction of Hexagonal-Array Photonics Integrated Interference Imaging System. IEEE Access 2020, 8, 139396–139403. [Google Scholar] [CrossRef]
- Yu, Q.; Ge, B.; Li, Y.; Yue, Y.; Chen, F.; Sun, S. System Design for a “Checkerboard” Imager. Appl. Opt. 2018, 57, 10218. [Google Scholar] [CrossRef]
- Chen, T.; Zeng, X.; Zhang, Z.; Zhang, F.; Bai, Y.; Zhang, X. REM: A Simplified Revised Entropy Image Reconstruction for Photonics Integrated Interference Imaging System. Opt. Commun. 2021, 501, 127341. [Google Scholar] [CrossRef]
- Ding, C.; Zhang, X.; Liu, X.; Meng, H.; Xu, M. High-Resolution Reconstruction Method of Segmented Planar Imaging Based on Compressed Sensing. In Proceedings of the Advanced Optical Imaging Technologies II, Hangzhou, China, 21–23 October 2019; Carney, P.S., Yuan, X.-C., Shi, K., Somekh, M.G., Eds.; SPIE: Hangzhou, China, 2019; p. 4. [Google Scholar]
- Zhang, Z.; Li, H.; Lv, G.; Zhou, H.; Feng, H.; Xu, Z.; Li, Q.; Jiang, T.; Chen, Y. Deep Learning-Based Image Reconstruction for Photonic Integrated Interferometric Imaging. Opt. Express 2022, 30, 41359. [Google Scholar] [CrossRef]
- Chen, H.; On, M.B.; Lee, Y.J.; Zhang, L.; Proietti, R.; Ben Yoo, S.J. Photonic Interferometric Imager with Monolithic Silicon CMOS Photonic Integrated Circuits. In Proceedings of the Optical Fiber Communication Conference (OFC), San Diego, CA, USA, 6–10 March 2022; Optica Publishing Group: San Diego, CA, USA, 2022; p. Tu2I.2. [Google Scholar]
- Zhang, Y.; Wang, K.; An, Q.; Hao, Y.; Meng, H.; Liu, X. High-Accuracy Online Calibration Scheme for Large-Scale Integrated Photonic Interferometric Measurements. IEEE Photonics J. 2022, 14, 1–5. [Google Scholar] [CrossRef]
- Liu, S.; Chen, Z.; Ye, Z.; Qi, Y.; Zhao, H.; Qu, Z.; Lu, J.; Wang, Y.; Han, C. Optical Direction-Finding Based on Silicon Photonic Integrated Circuits. J. Light. Technol. 2023, 41, 2650–2656. [Google Scholar] [CrossRef]
- Yu, Q.; Wu, D.; Chen, F.; Sun, S. Design of a Wide-Field Target Detection and Tracking System Using the Segmented Planar Imaging Detector for Electro-Optical Reconnaissance. Chin. Opt. Lett. 2018, 16, 071101. [Google Scholar] [CrossRef]
- Chen, J.; Ge, B.; Yu, Q. Influence of Measurement Errors of the Complex Coherence Factor on Reconstructed Image Quality of Integrated Optical Interferometric Imagers. Opt. Eng. 2022, 61, 105108. [Google Scholar] [CrossRef]
- Hui, L.; Chengyu, F. An Improved Focusing Algorithm Based on Image Definition Evaluation. In Proceedings of the 2011 2nd International Conference on Artificial Intelligence, Management Science and Electronic Commerce (AIMSEC), Dengfeng, China, 8–10 August 2011; pp. 3743–3746. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image Quality Assessment: From Error Visibility to Structural Similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Array parameter | 50 |
| Size of the lens array | 101 × 101 |
| Minimum baseline | 0.002 m |
| Diameter of the | 0.002 m |
| Diameter of system | 0.283 m |
| Size of the waveguide array after each lens | 1 × 1 |
| Working wavelength | 600 nm |
| FOV | 0.0172° |
| Distance of target | 1500 m |
| Width of FOV of single waveguide | 0.450 m |
| Parameter | Value |
|---|---|
| Array parameter | 50 |
| Size of the lens array | 101 × 101 |
| Minimum baseline | 0.003 m |
| Diameter of the | 0.002 m |
| Diameter of system | 0.424 m |
| Size of the waveguide array after each lens | 9 × 9 |
| Working wavelength | 800 nm |
| FOV | 0.1375° |
| The distance of the ground and the car | 10 km |
| The length of the car | 2.83 m |
| The distance of the UAV | 8 km |
| The size of the UAV | 1.79 m × 1.43 m |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ge, B.; Yu, Q.; Chen, J.; Sun, S. Passive 3D Imaging Method Based on Photonics Integrated Interference Computational Imaging System. Remote Sens. 2023, 15, 2333. https://doi.org/10.3390/rs15092333
Ge B, Yu Q, Chen J, Sun S. Passive 3D Imaging Method Based on Photonics Integrated Interference Computational Imaging System. Remote Sensing. 2023; 15(9):2333. https://doi.org/10.3390/rs15092333
Chicago/Turabian StyleGe, Ben, Qinghua Yu, Jialiang Chen, and Shengli Sun. 2023. "Passive 3D Imaging Method Based on Photonics Integrated Interference Computational Imaging System" Remote Sensing 15, no. 9: 2333. https://doi.org/10.3390/rs15092333