
Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver

 ,
,
Abstract
:
1. Introduction
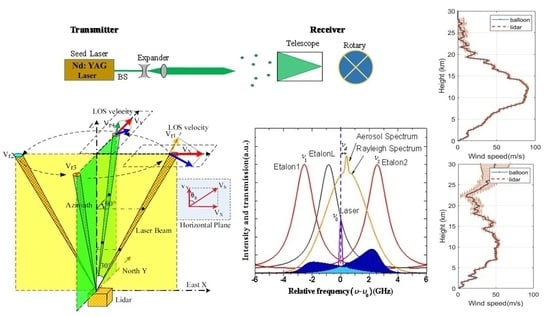
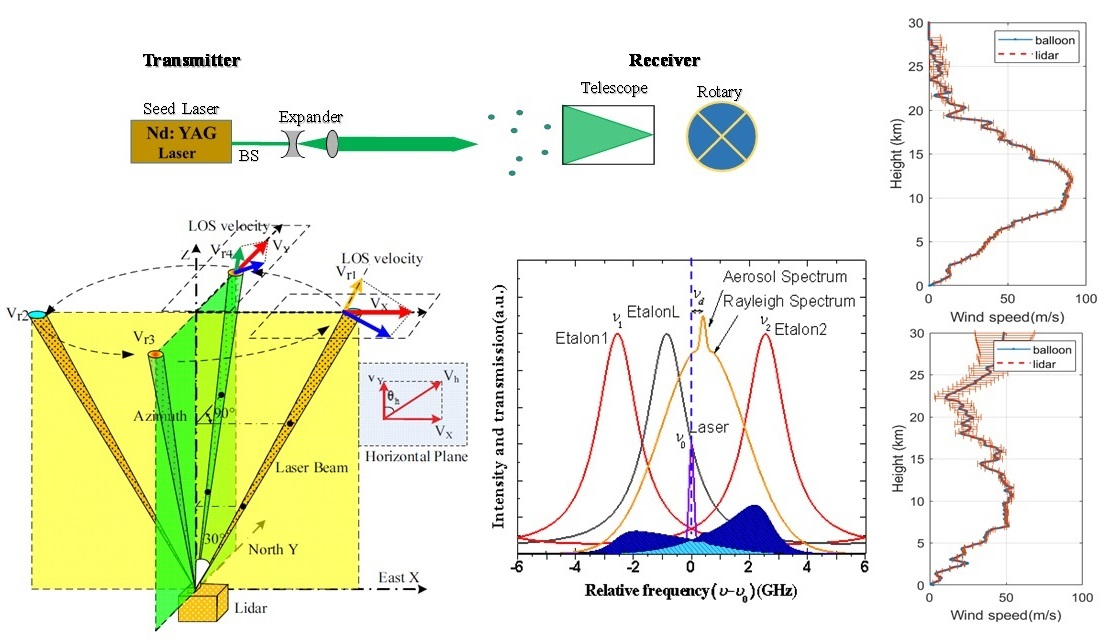
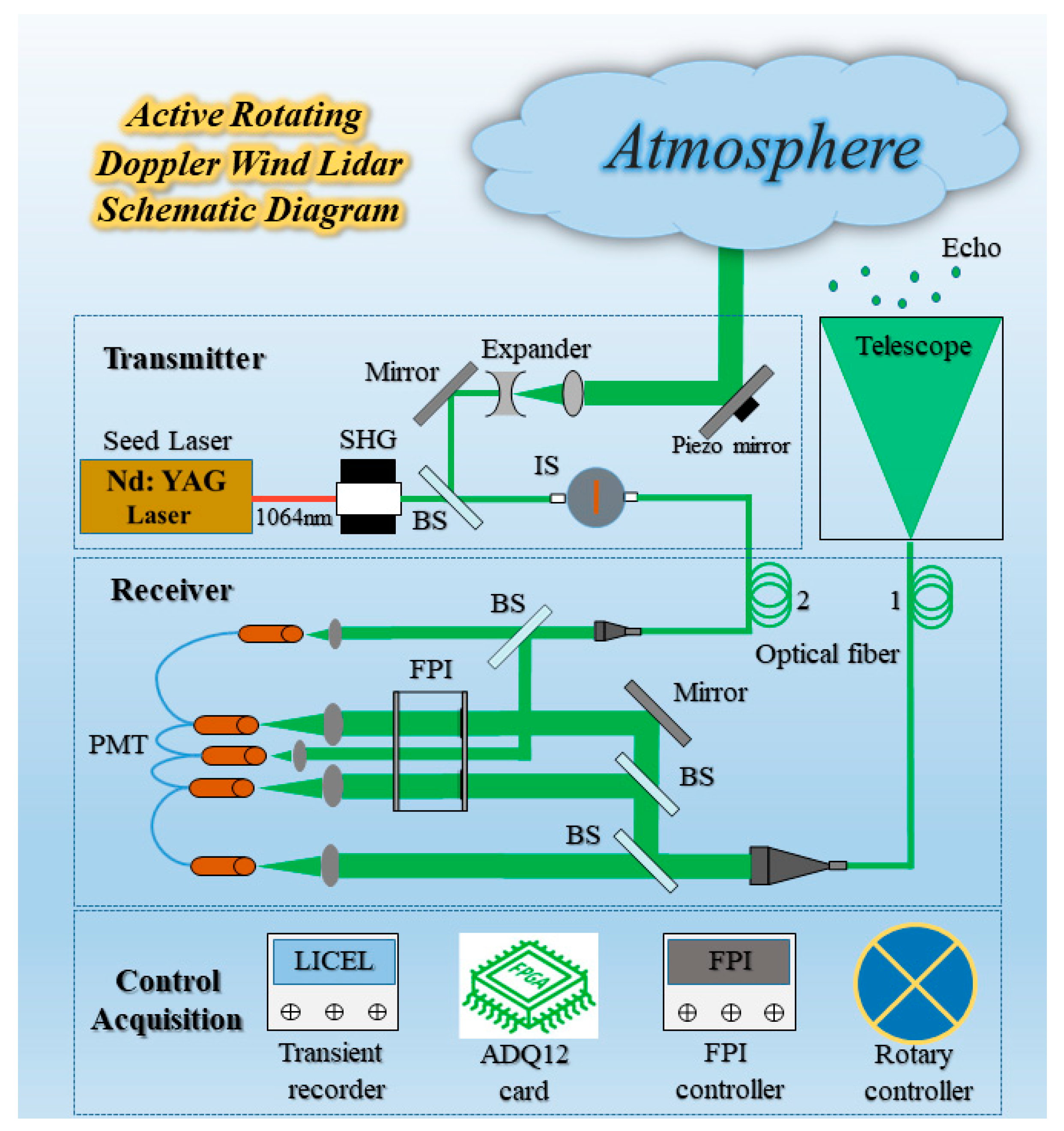
2. Doppler Wind Lidar System
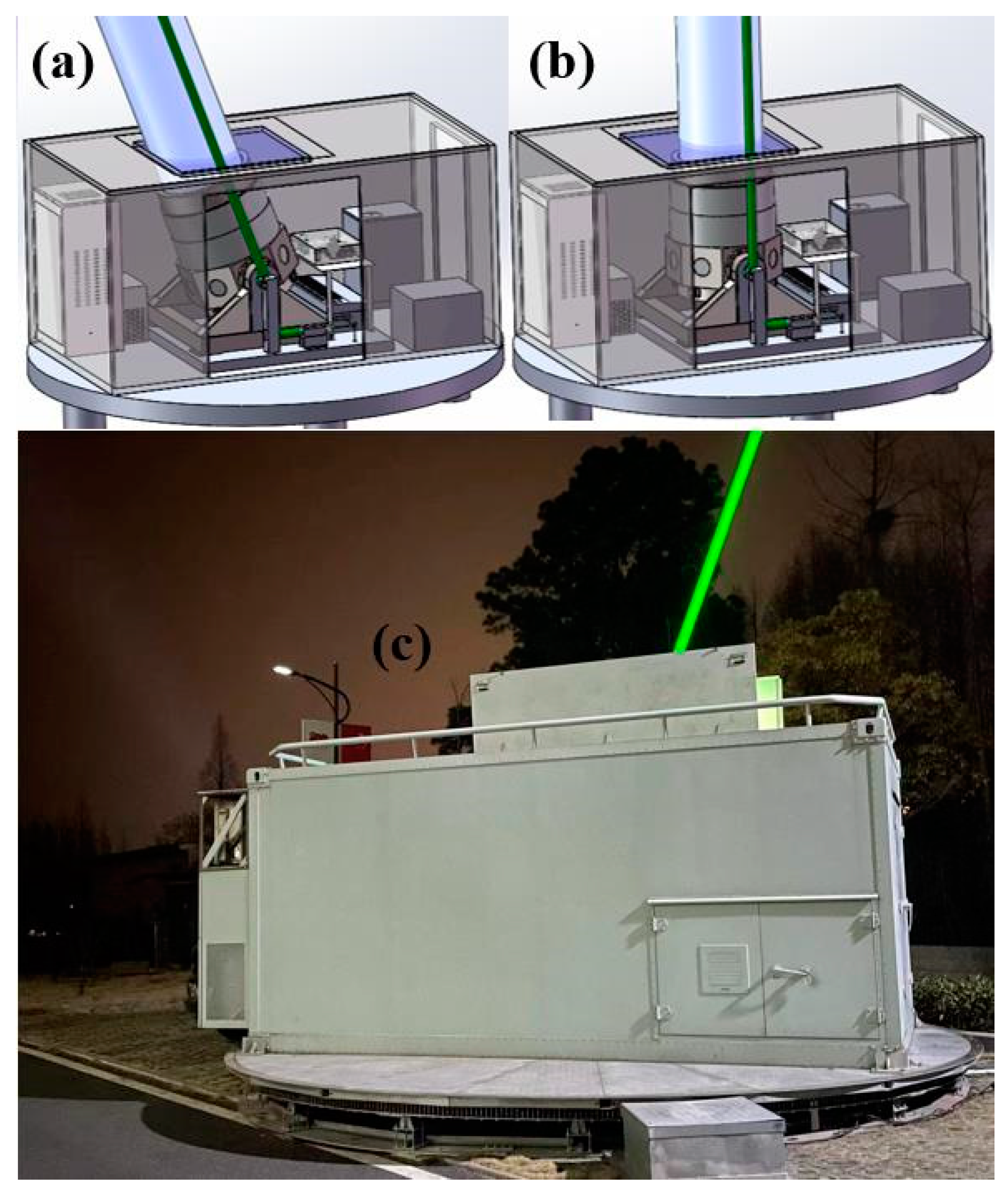
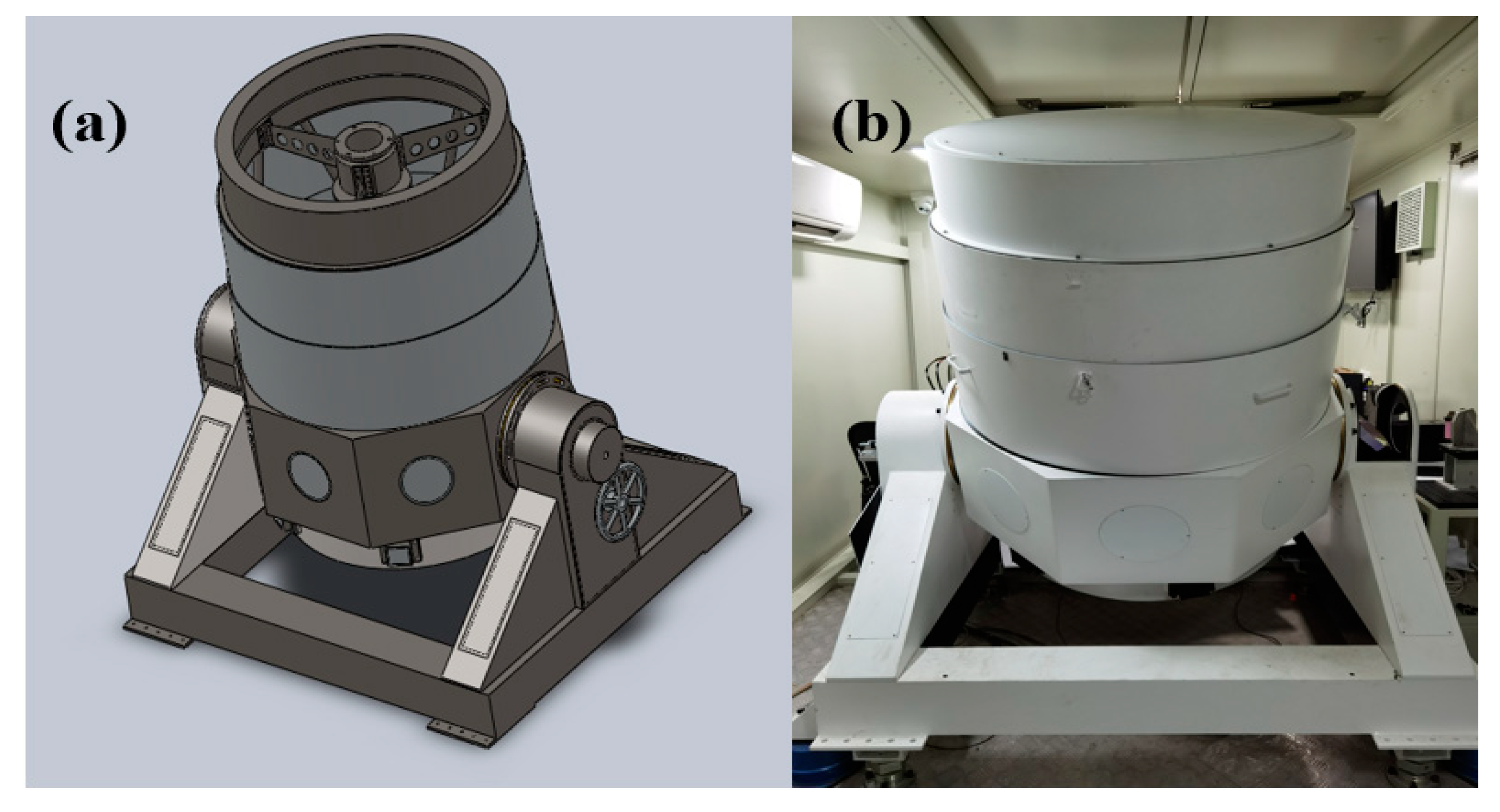
2.1. Whole Structure
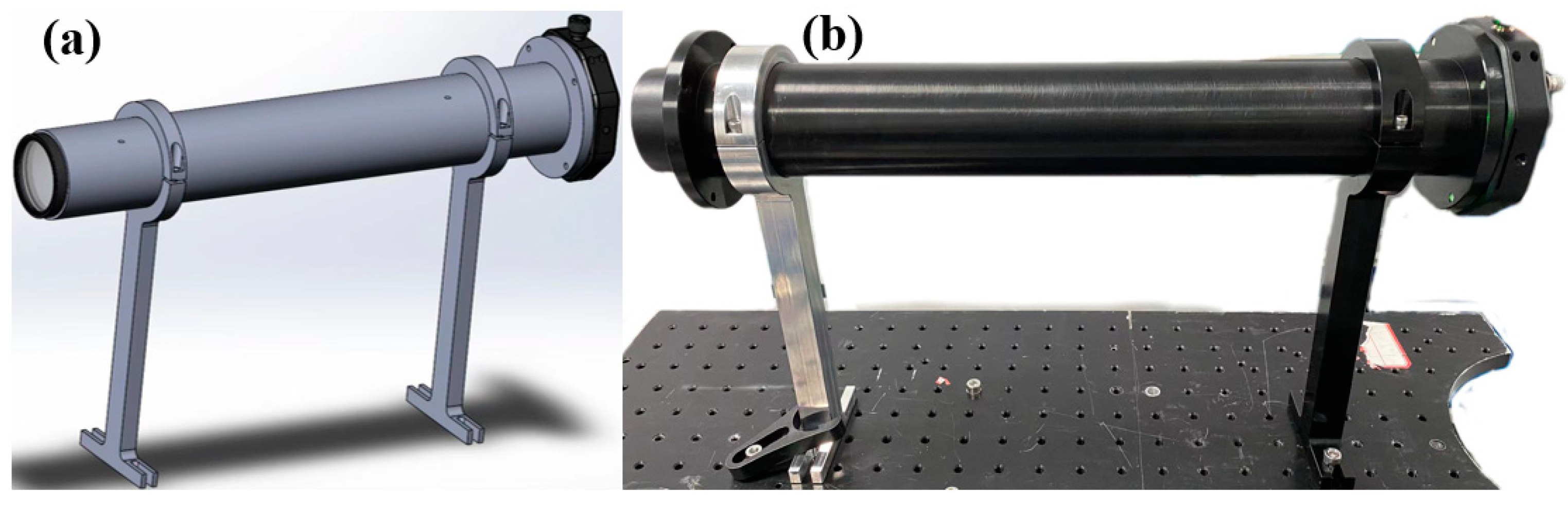
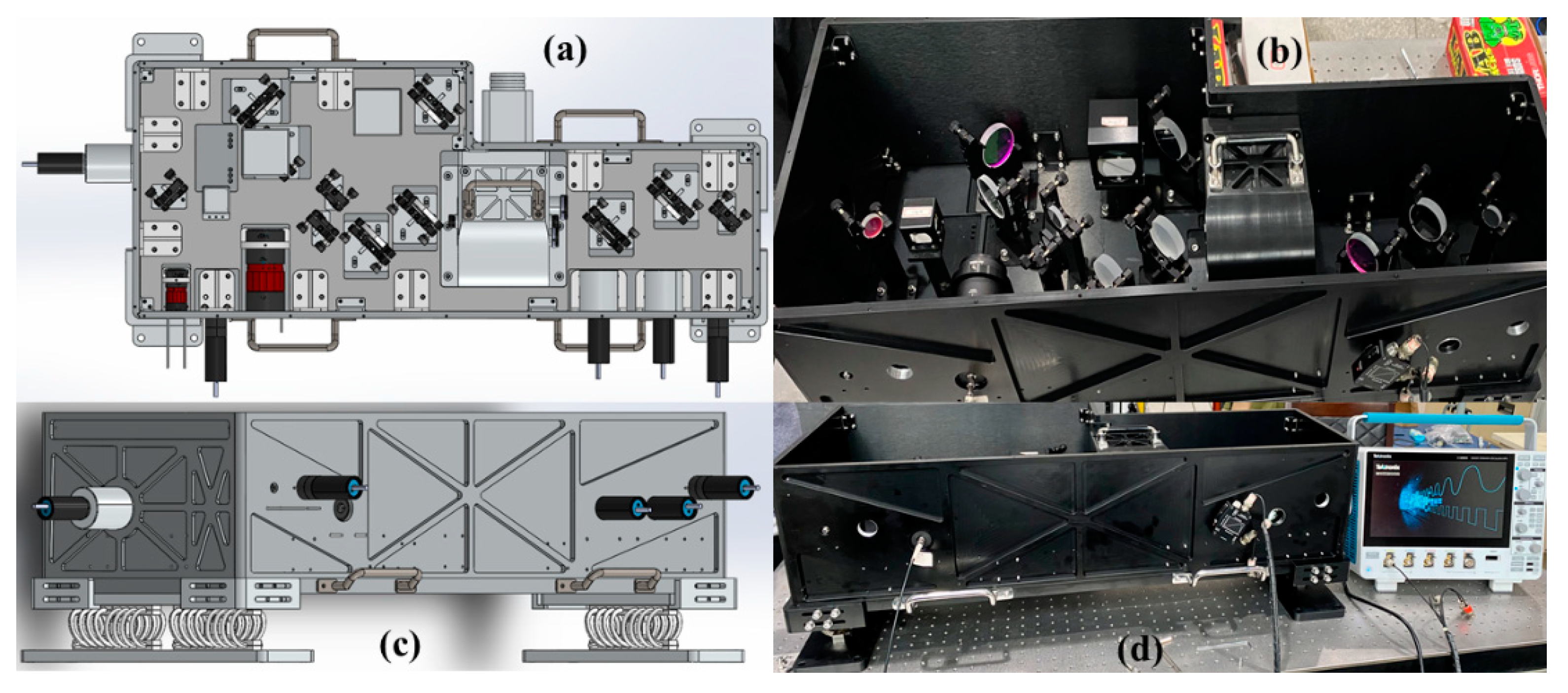
2.2. Transmitter System
2.3. Receiver System
2.4. Control and Acquisition System
2.5. Inversion Principle for Wind Speed
3. Performance Studies of Transmitter and Receiver
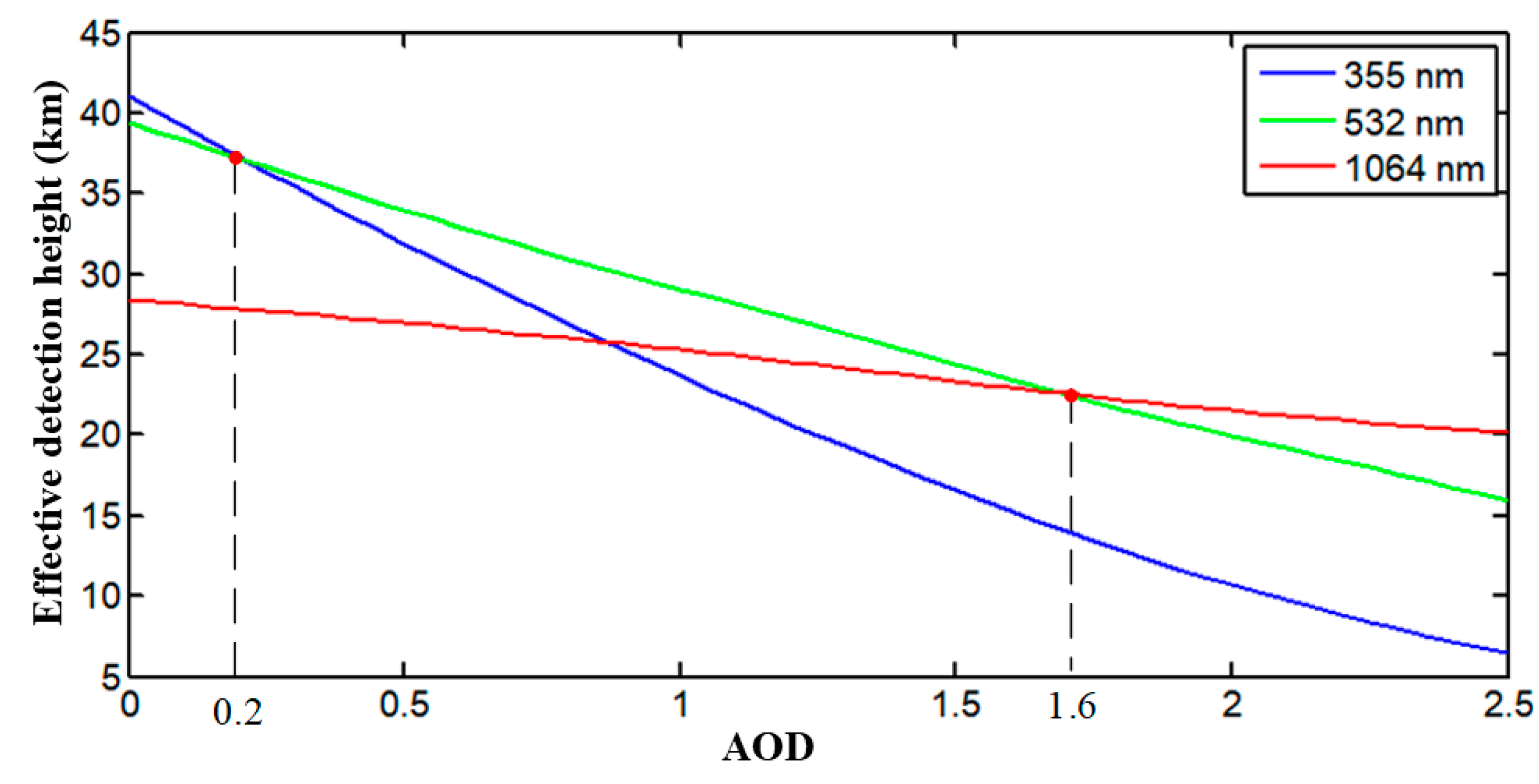
3.1. Laser Wavelength Selection
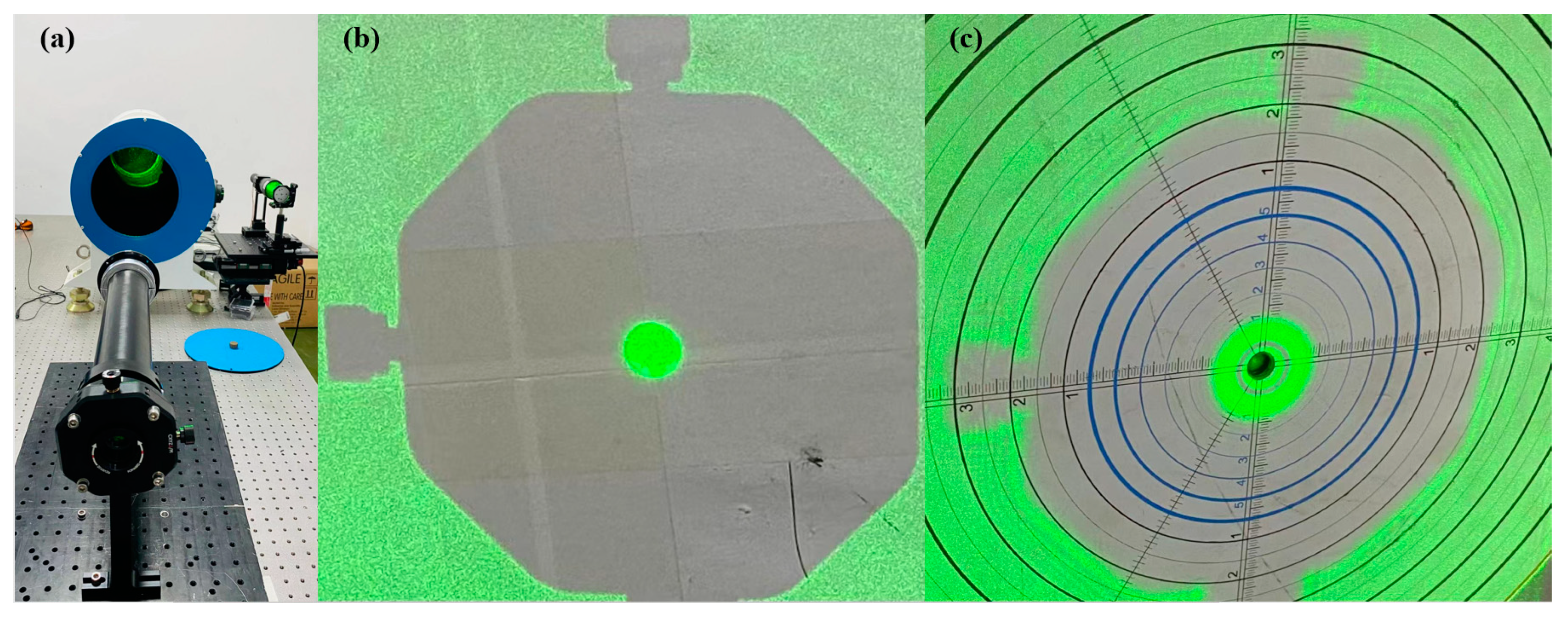
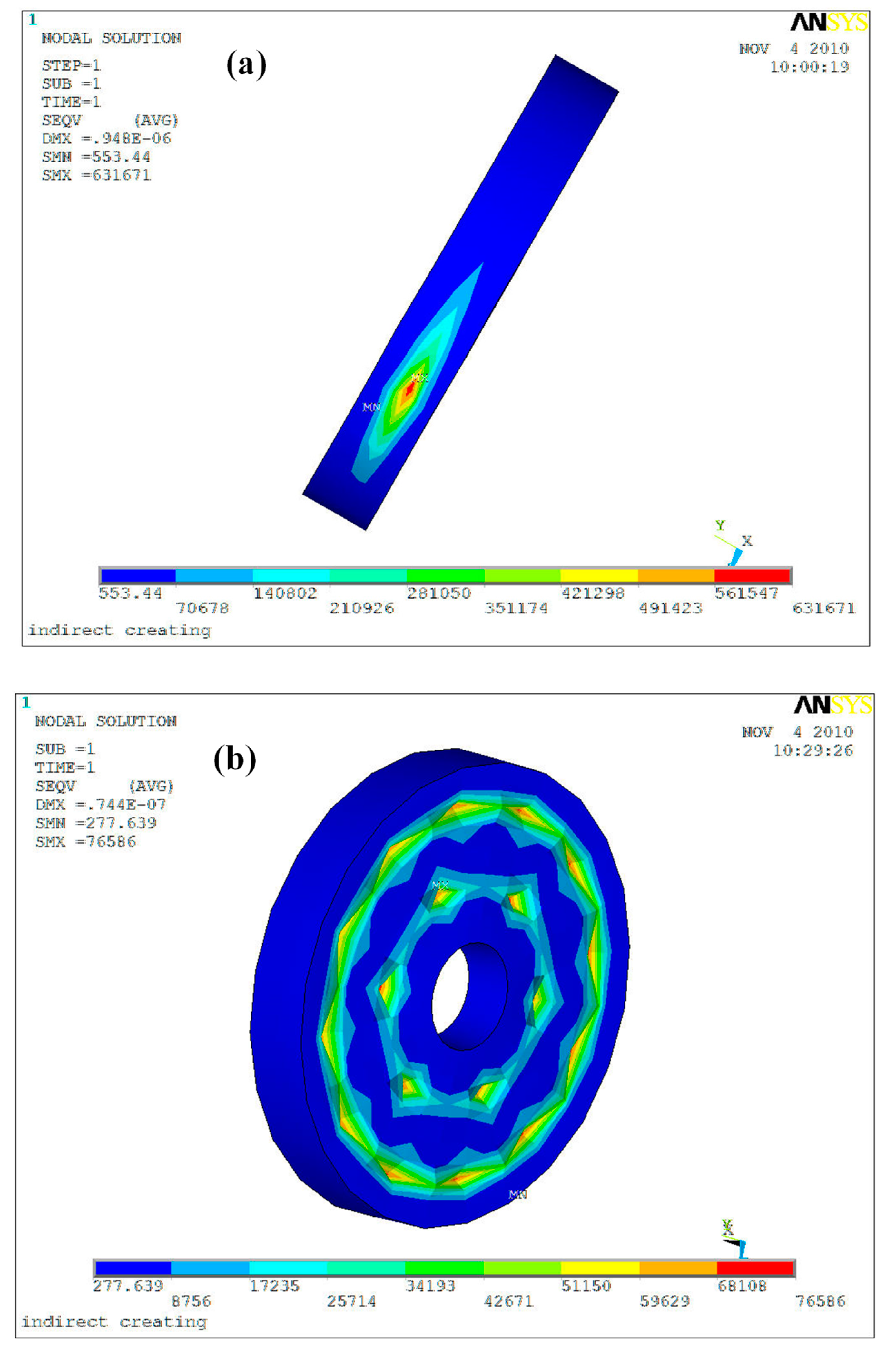
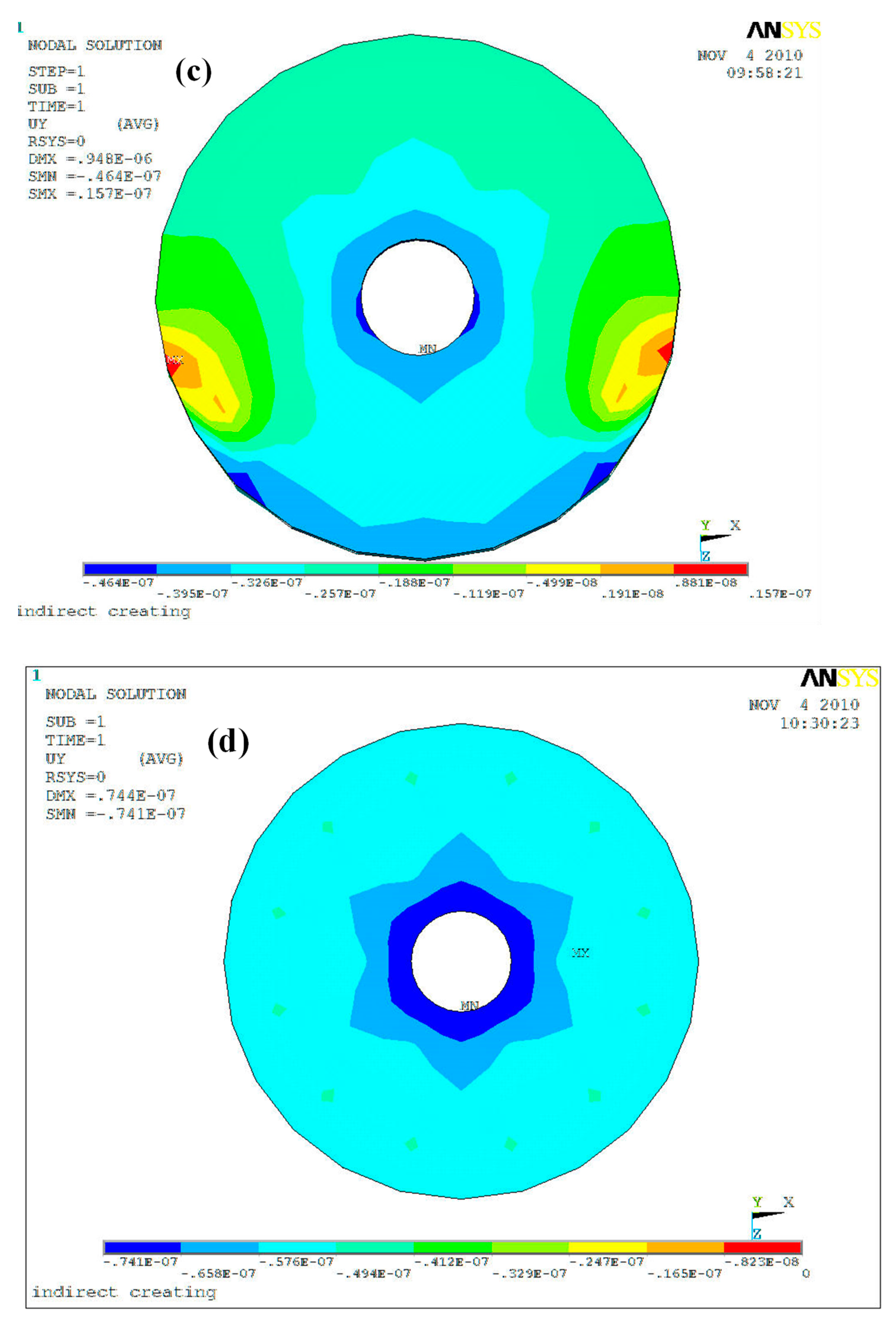
3.2. Laser Beam Expander Optimization
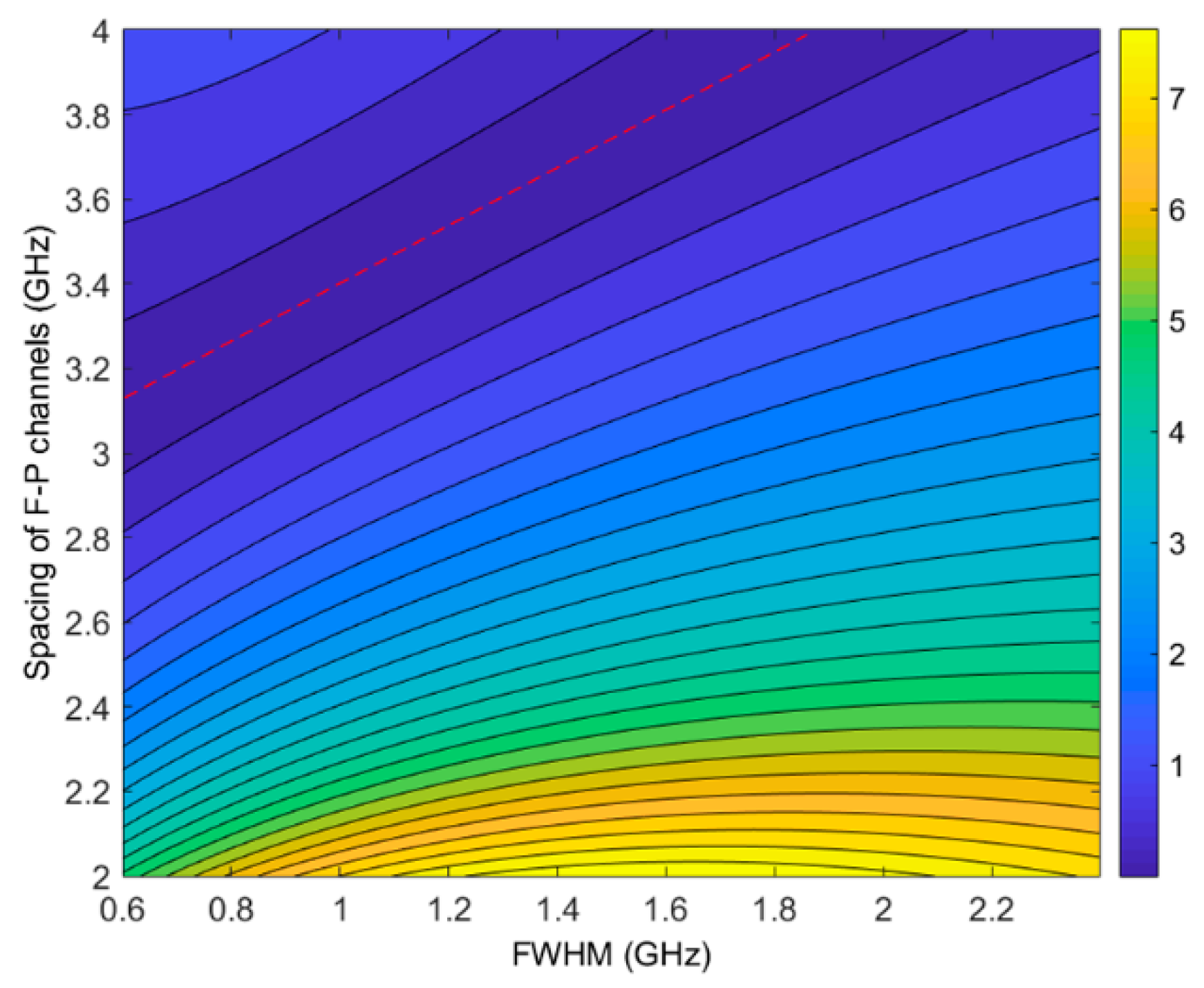
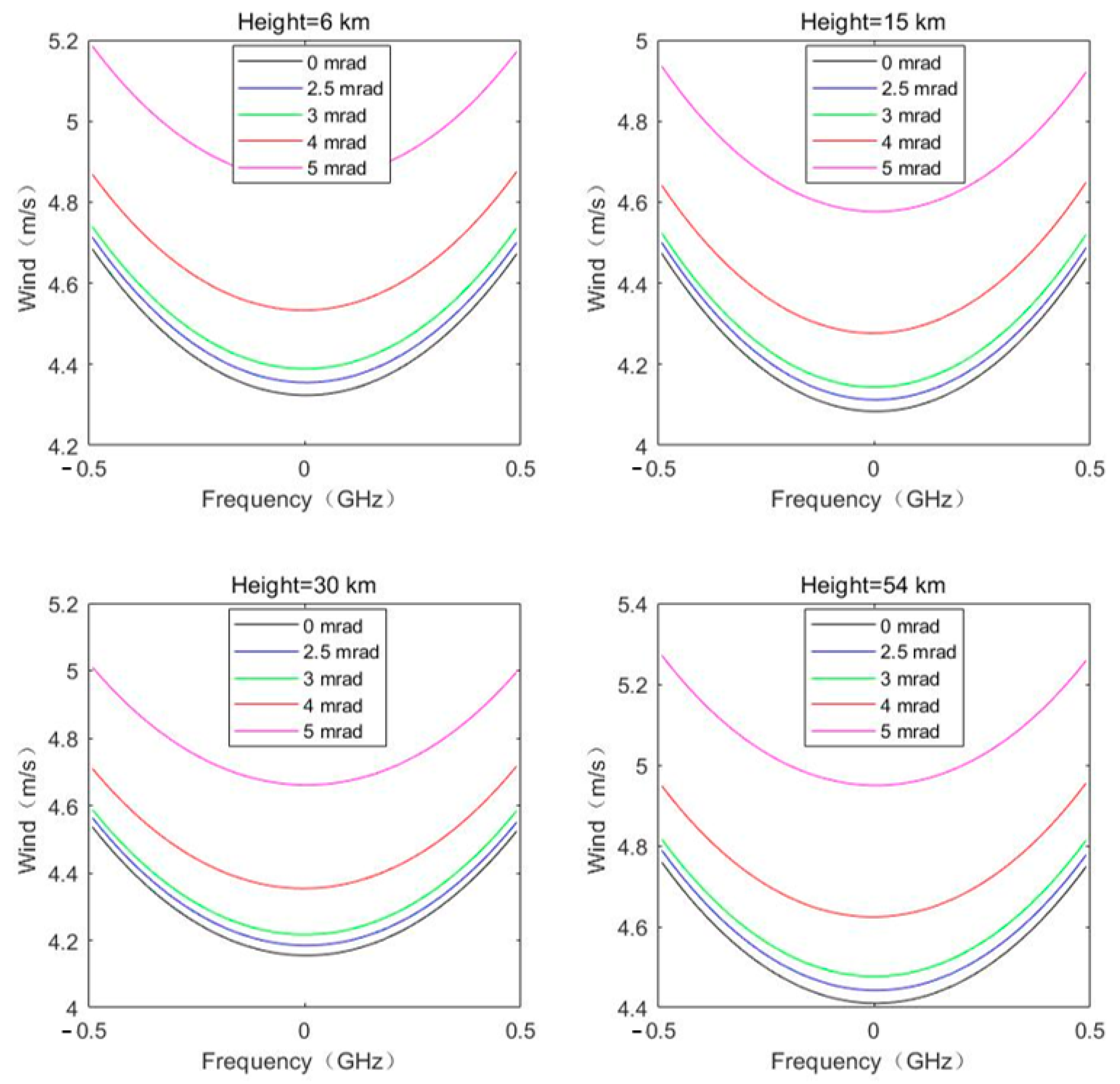
3.3. Receiver Optimization
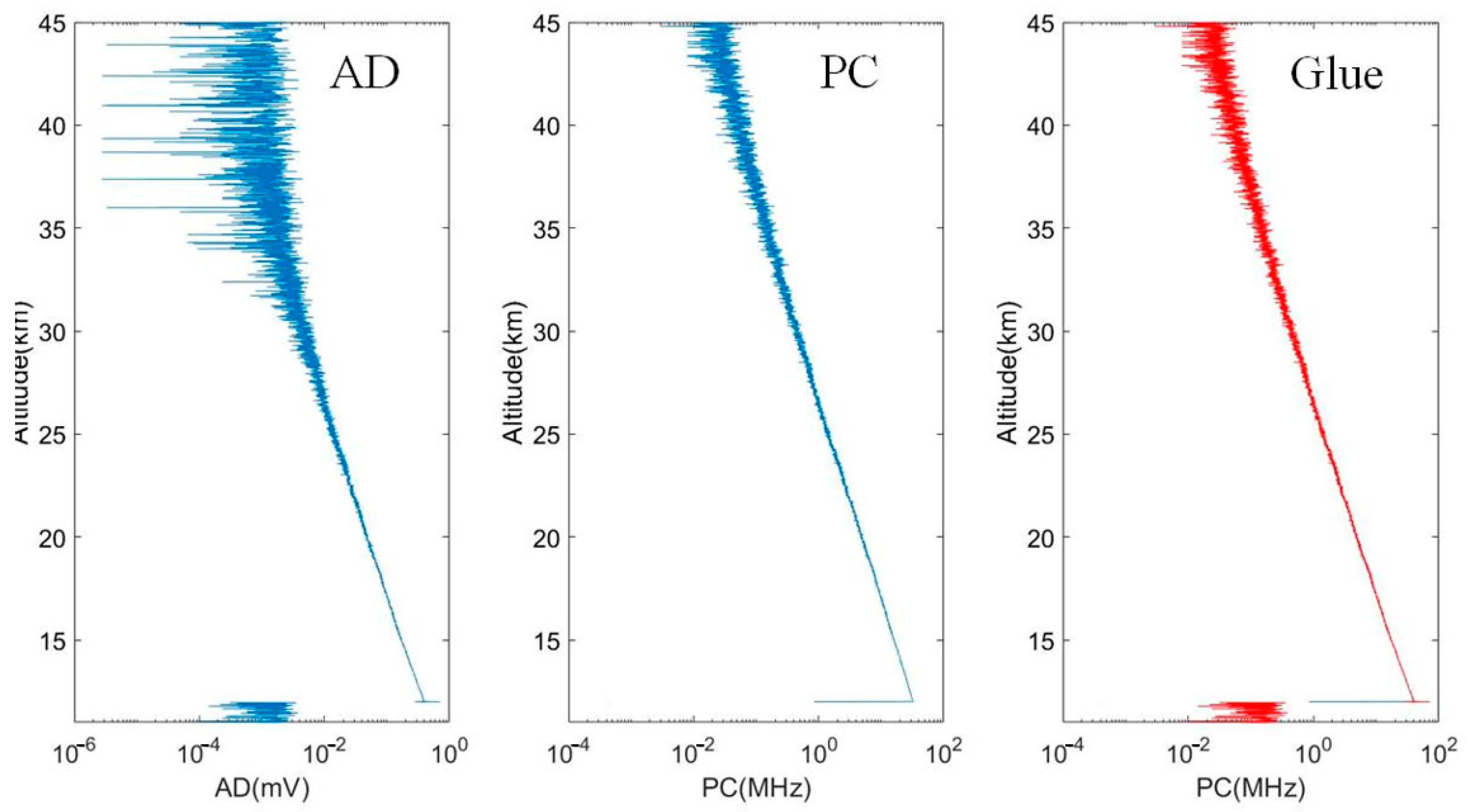
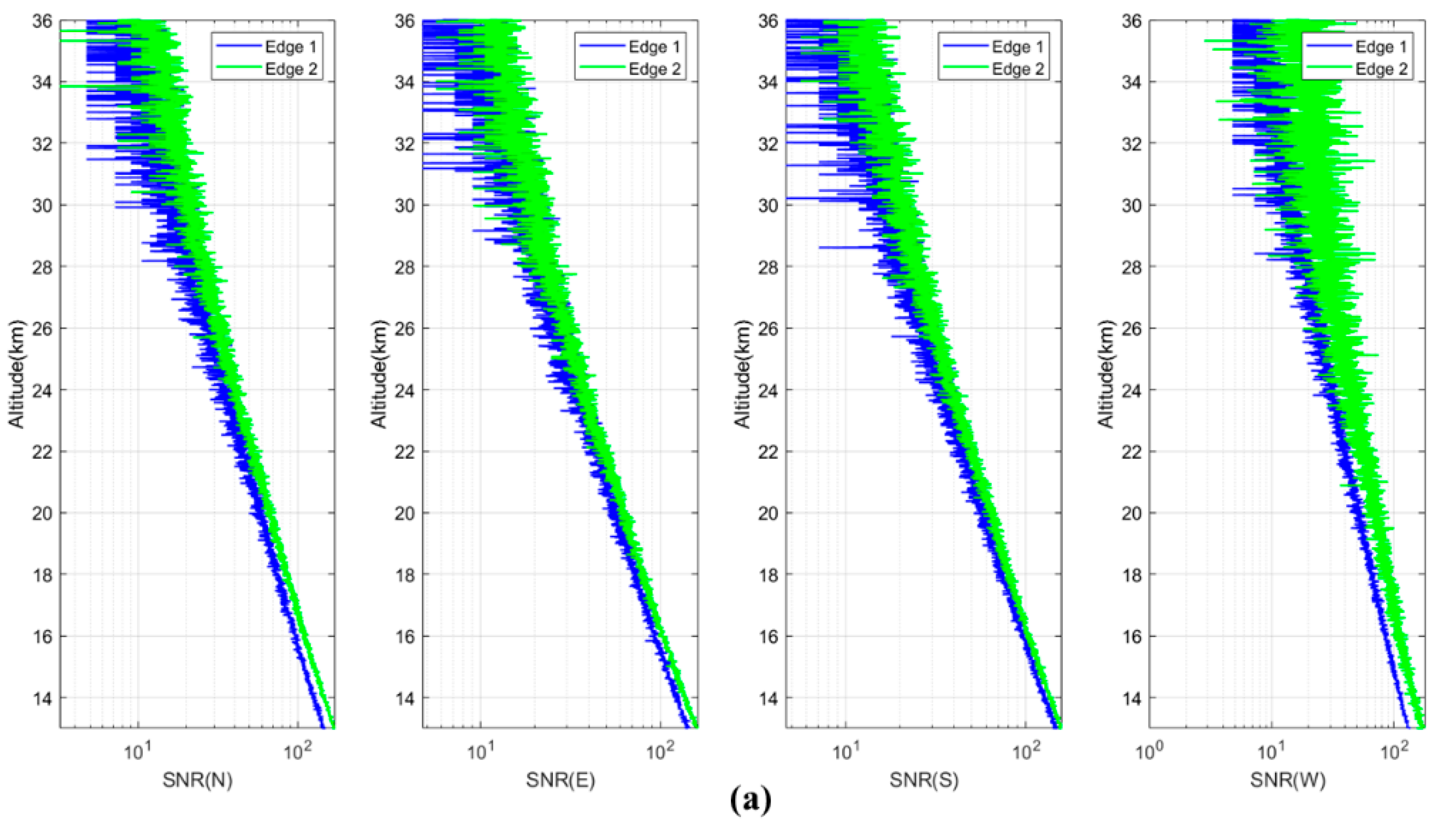
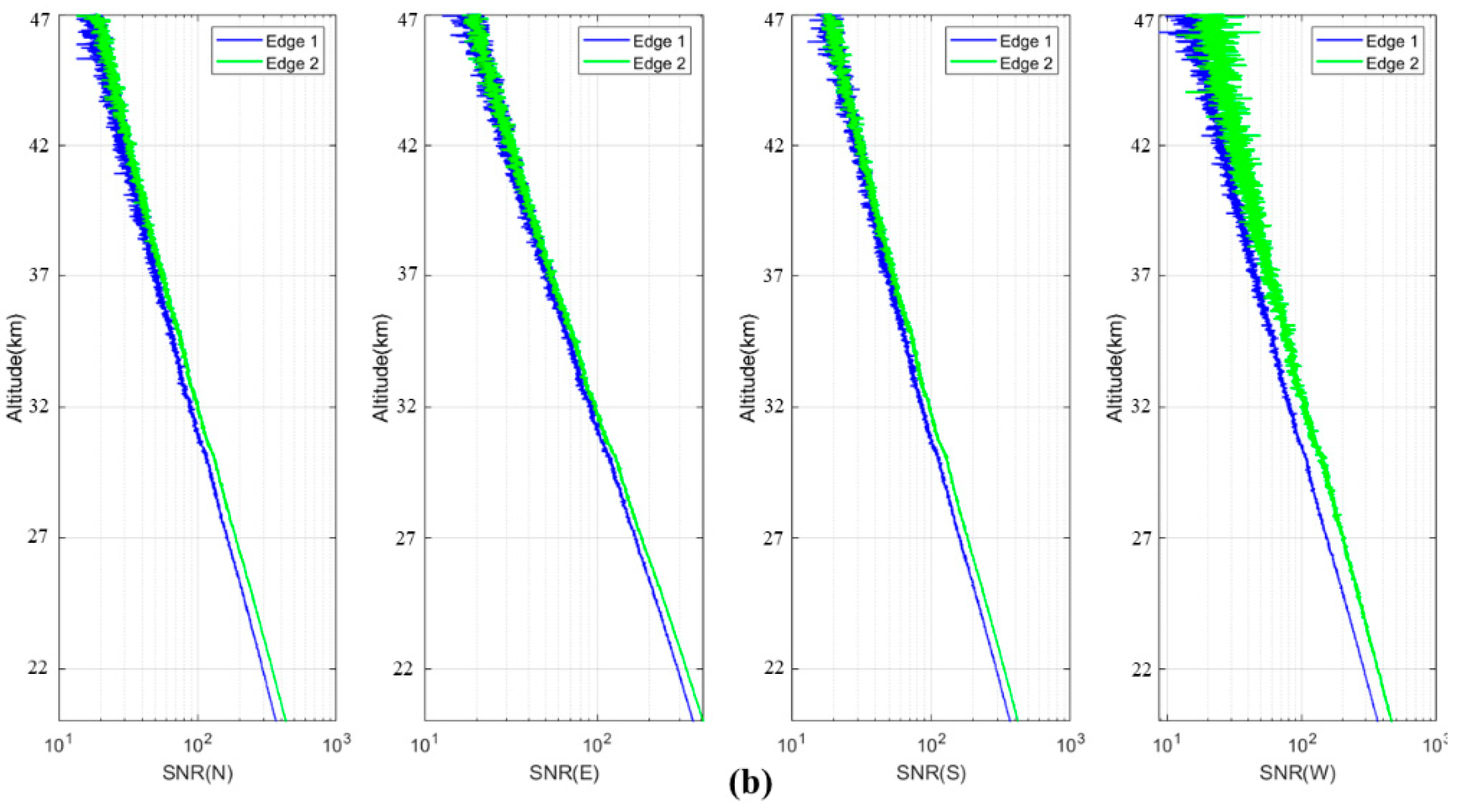
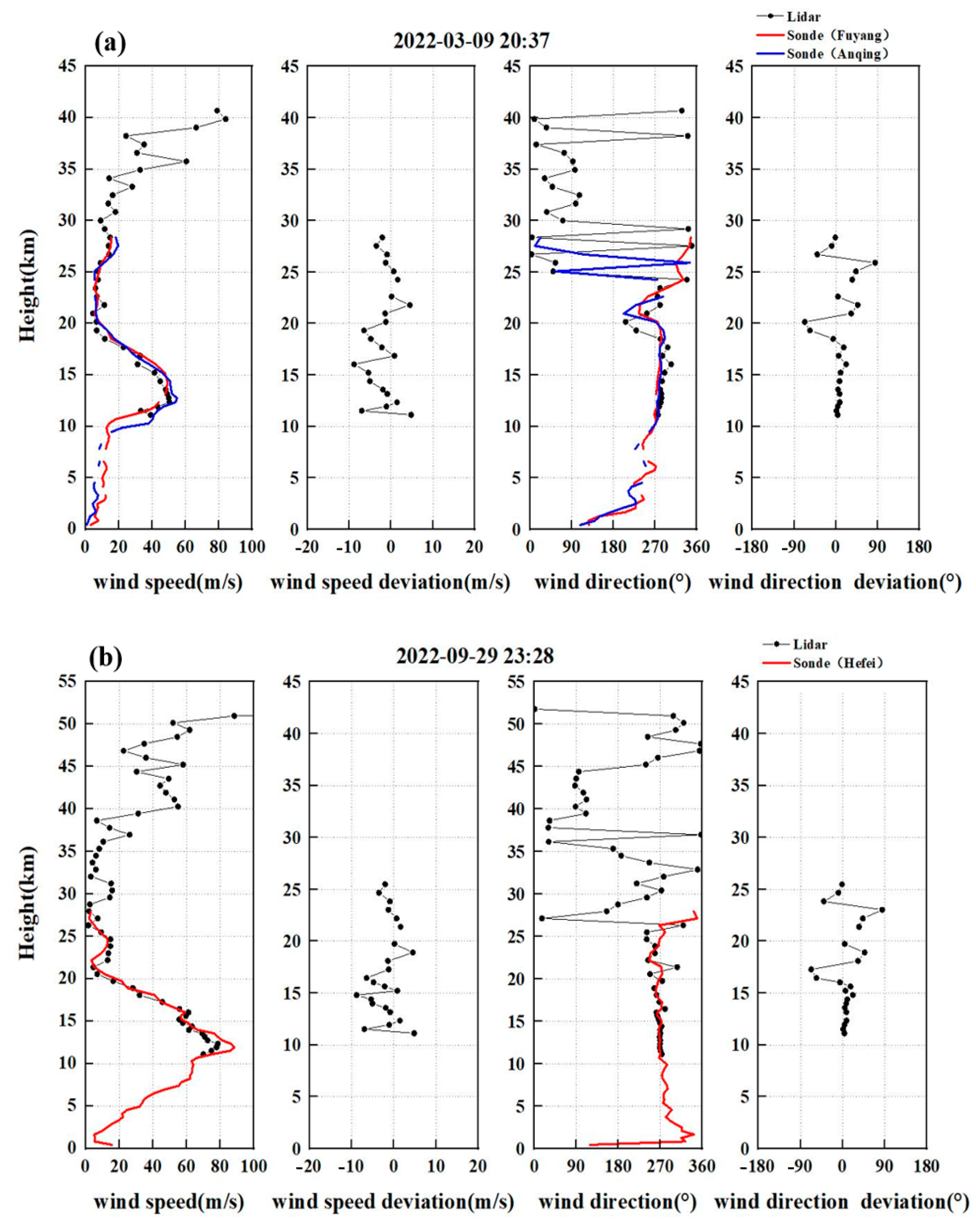
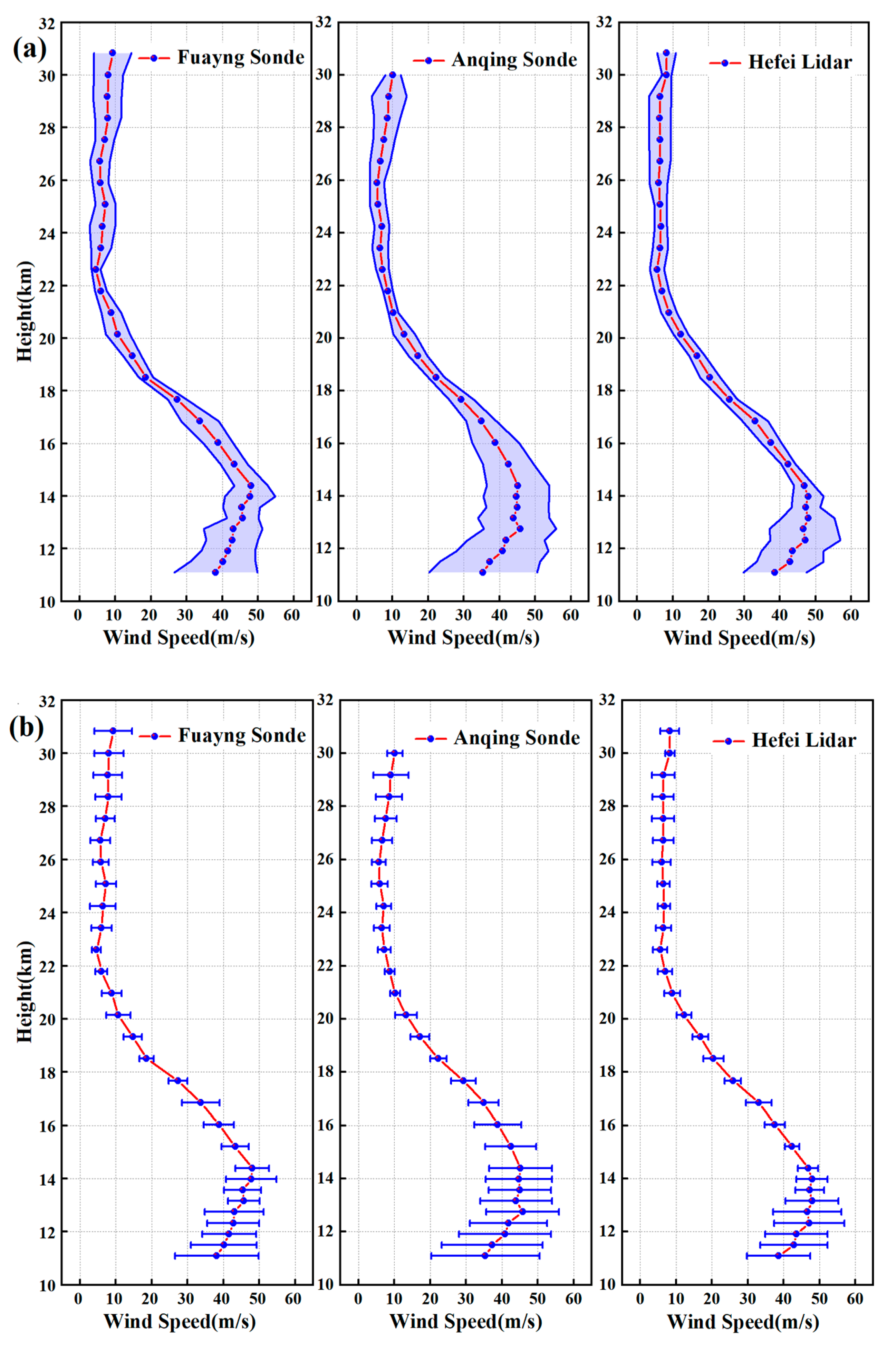
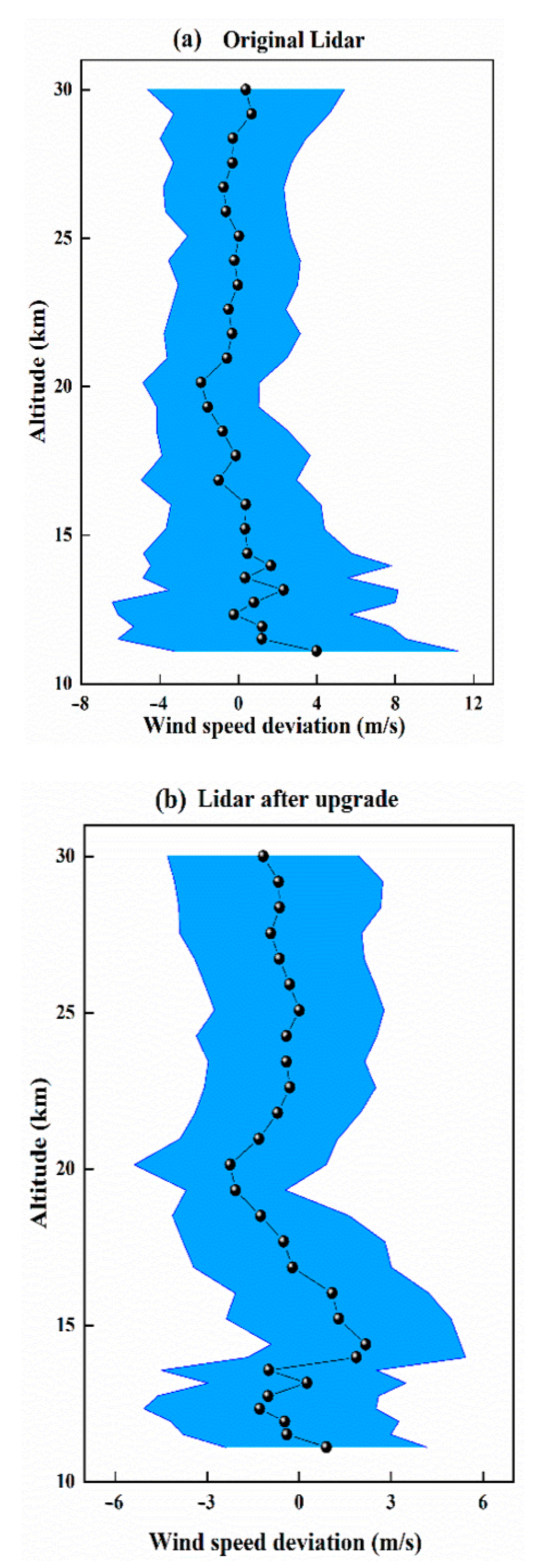
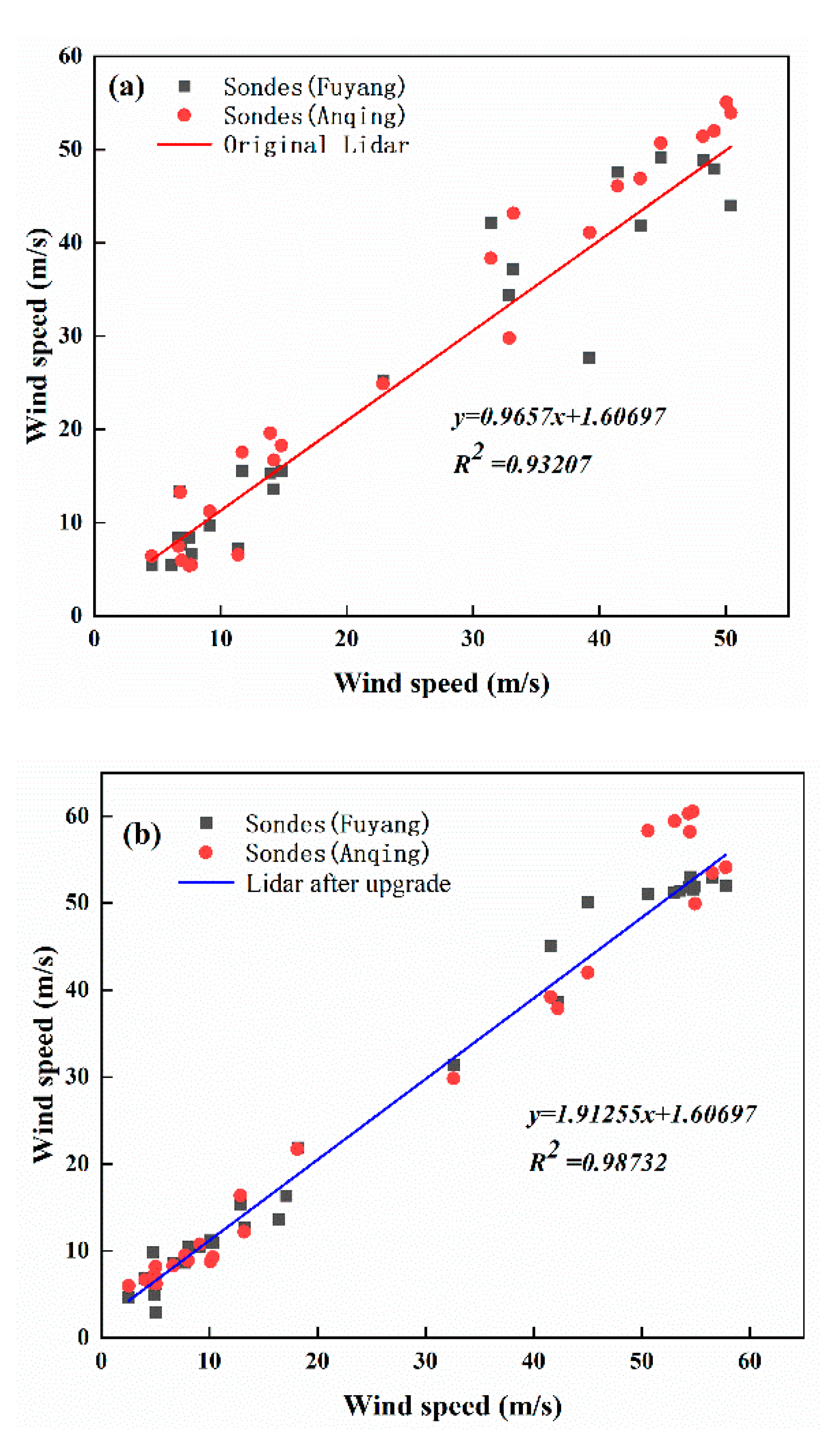
4. Comparison of Detection Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Correction Statement
References
- Solovjova, T.; Makarov, N.; Rees, D.; Fahrutdinova, A.; Guryanov, V.; Fedorov, D.; Korotyshkin, D.; Forbes, J.; Pogoreltsev, A.; Kurschner, D.M. Semi-empirical model of middle atmosphere wind from the ground to the lower thermosphere. Adv. Space Res. Off. J. Comm. Space Res. (COSPAR) 2009, 43, 239–246. [Google Scholar]
- Yang, J.; Xiao, C.; Hu, X.; Xu, Q. Responses of zonal wind at ~40°N to stratospheric sudden warming events in the stratosphere, mesosphere and lower thermosphere. Sci. China Technol. Sci. 2017, 60, 935–945. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Z.; Liu, L.; Wu, S.; Liu, B.; Li, Z.; Chu, X. Iodine-filter-based mobile Doppler lidar to make continuous and full-azimuth-scanned wind measurements: Data acquisition and analysis system, data retrieval methods, and error analysis. Appl. Opt. 2010, 49, 6960–6978. [Google Scholar]
- Hedin, A.; Fleming, E.; Manson, A.; Schmidlin, F.; Avery, S.; Clark, R.; Franke, S.; Fraser, G.; Tsuda, T.; Vial, F.; et al. Empirical wind model for the upper, middle and lower atmosphere. J. Atmospheric Terr. Phys. 1996, 58, 1421–1447. [Google Scholar] [CrossRef]
- Dou, X.; Han, Y.; Sun, D.; Xia, H.; Shu, Z.; Zhao, R.; Shangguan, M.; Guo, J. Mobile Rayleigh Doppler lidar for wind and temperature measurements in the stratosphere and lower mesosphere. Opt. Express 2014, 22, A1203–A1221. [Google Scholar] [CrossRef]
- Hao, R.; Dou, X.; Xue, X.; Sun, D.; Han, Y.; Chen, C.; Zheng, J.; Li, Z.; Zhou, A.; Han, Y.; et al. Stratosphere and lower mesosphere wind observation and gravity wave activities of the wind field in China using a mobile Rayleigh Doppler lidar. J. Geophys. Res. Space Phys. 2017, 122, 8847–8857. [Google Scholar]
- Gentry, B.M.; Chen, H.; Li, S.X. Wind measurements with 355-nm molecular Doppler lidar. Opt. Lett. 2000, 25, 1231–1233. [Google Scholar] [CrossRef]
- Feifei, L.; Decang, B.; Heng, L.; Lucheng, Y.; Mingjian, W.; Xiaopeng, Z.; Jiqiao, L.; Weibiao, C. Principle Prototype and Experimental Progress of Wind Lidar in Near Space. Chin. J. Lasers 2020, 47, 0810003. [Google Scholar] [CrossRef]
- Souprayen, C.; Garnier, A.; Hertzog, A. Rayleigh-Mie Doppler wind lidar for atmospheric measurements. II. Mie scattering effect, theory, and calibration. Appl. Opt. 1999, 38, 2422–2431. [Google Scholar]
- Ansmann, A.; Wandinger, U.; Le Rille, O.; Lajas, D.; Straume, A.G. Particle backscatter and extinction profiling with the spaceborne high-spectral-resolution Doppler lidar ALADIN: Methodology and simulations. Appl. Opt. 2007, 46, 6606–6622. [Google Scholar] [CrossRef]
- Baumgarten, G. Doppler Rayleigh/Mie/Raman lidar for wind and temperature measurements in the middle atmosphere up to 80 km. Atmospheric Meas. Tech. 2010, 3, 1509–1518. [Google Scholar] [CrossRef]
- Huffaker, R.M.; Reveley, P.A. Solid-state coherent laser radar wind field measurement systems. Pure Appl. Opt. J. Eur. Opt. Soc. Part A 1998, 7, 863–873. [Google Scholar]
- Zhao, Y.; Zhang, X.; Zhang, Y.; Ding, J.; Wang, K.; Gao, Y.; Su, R.; Fang, J. Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sens. 2021, 13, 3549. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Wang, Q.; Zhang, J.; He, Z.; Zhang, X.; Li, R.; Zhang, K.; Tang, J.; Wu, S. Low-Level Wind Shear Identification along the Glide Path at BCIA by the Pulsed Coherent Doppler Lidar. Atmosphere 2020, 12, 50. [Google Scholar] [CrossRef]
- Guo, W.; Shen, F.; Shi, W.; Liu, M.; Wang, Y.; Zhu, C.; Shen, L.; Wang, B.; Zhuang, P. Data inversion method for dual-frequency Doppler lidar based on Fabry-Perot etalon quad-edge technique. Optik 2018, 159, 31–38. [Google Scholar] [CrossRef]
- Shen, F.; Xie, C.; Qiu, C.; Wang, B. Fabry-Perot etalon-based ultraviolet trifrequency high-spectral-resolution lidar for wind, temperature, and aerosol measurements from 0.2 to 35 km altitude. Appl. Opt. 2018, 57, 9328–9340. [Google Scholar] [CrossRef]
- Shen, F.; Ji, J.; Xie, C.; Wang, Z.; Wang, B. High-spectral-resolution Mie Doppler lidar based on a two-stage Fabry-Perot etalon for tropospheric wind and aerosol accurate measurement. Appl. Opt. 2019, 58, 2216–2225. [Google Scholar] [CrossRef]
- Shen, F.; Wang, B.; Shi, W.; Zhuang, P.; Zhu, C.; Xie, C. Design and performance simulation of 532 nm Rayleigh-Mie Doppler lidar system for 5–50 km wind measurement. Opt. Commun. 2018, 412, 7–13. [Google Scholar] [CrossRef]
- Yan, Z.; Hu, X.; Guo, W.; Guo, S.; Cheng, Y.; Gong, J.; Yue, J. Development of a mobile Doppler lidar system for wind and temperature measurements at 30–70 km. J. Quant. Spectrosc. Radiat. Transf. 2017, 188, 52–59. [Google Scholar] [CrossRef]
- Zhang, F.; Dou, X.; Sun, D.; Shu, Z.; Xia, H.; Gao, Y.; Hu, D.; Shangguan, M. Analysis on error of laser frequency locking for fiber optical receiver in direct detection wind lidar based on Fabry-Perot interferometer and improvements. Opt. Eng. 2014, 53, 124102. [Google Scholar] [CrossRef]
- Han, Y.; Sun, D.-S.; Weng, N.-Q.; Wang, J.-G.; Dou, X.-K.; Zhang, Y.-H.; Guan, J.; Miao, Q.; Chen, X. Lidar observations of wind over Xin Jiang, China: General characteristics and variation. Opt. Rev. 2016, 23, 637–645. [Google Scholar] [CrossRef]
- Straume-Lindner, A.G.; Ingmann, P.; Endemann, M. Status of the Doppler Wind Lidar Profiling Mission ADM-Aeolus; European Space Research and Technology Centre (ESA-ESTEC): Noordwijk, The Netherlands, 1999. [Google Scholar]
- Zhao, M.; Xie, C.; Wang, B.; Xing, K.; Chen, J.; Fang, Z.; Li, L.; Cheng, L. A Rotary Platform Mounted Doppler Lidar for Wind Measurements in Upper Troposphere and Stratosphere. Remote Sens. 2022, 14, 5556. [Google Scholar] [CrossRef]
- Li, S.; Sun, X.; Zhang, R.; Zhang, C. Simulation of Frequency Discrimination and Retrieval of Wind Speed for the Bistatic Doppler Wind Lidar. Optik 2018, 179, 796–803. [Google Scholar] [CrossRef]
- Zhang, C.; Sun, X.; Zhang, R.; Zhao, S.; Lu, W.; Liu, Y.; Fan, Z. Impact of solar background radiation on the accuracy of wind observations of spaceborne Doppler wind lidars based on their orbits and optical parameters. Opt. Express 2019, 27, A936–A952. [Google Scholar] [CrossRef]
- Zhao, R.-C.; Xia, H.-Y.; Dou, X.-K.; Sun, D.-S.; Han, Y.-L.; Shangguan, M.-J.; Guo, J.; Shu, Z.-F. Correction of temperature influence on the wind retrieval from a mobile Rayleigh Doppler lidar. Chin. Phys. B 2015, 24, 024218. [Google Scholar] [CrossRef]
- Tang, L.; Shu, Z.; Dong, J.; Wang, G.; Wang, Y.; Xu, W.; Hu, D.; Chen, T.; Dou, X.; Sun, D.; et al. Mobile Rayleigh Doppler wind lidar based on double-edge technique. Chin. Opt. Lett. 2010, 8, 726–731. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Laser wavelength | 532.1 nm |
| Pulse energy | 350 mJ |
| Repetition rate | 30 Hz |
| FWHM | 70 MHz |
| Divergence angle | 50 μrad |
| Telescope diameter | 800 mm |
| FOV | 100 μrad |
| FWHM | 0.3 nm |
| Fiber core diameters | 200 μrad |
| Fiber N.A. | 0.22 |
| Beam divergence | 2.5 mrad |
| Transient recorder | 12 bit@AD, 250 MHz@PC |
| 20 MHz sampling rate | |
| Acquisition card | 12 bit, 1 GHz sampling rate |
| CPU | ≥2.0 GHz |
| RAM | ≥4 GB |
| HDD | ≥500 GB |
| Surf | Radius/mm | Thickness/mm | Material | Diameter (Half)/mm | Conic |
|---|---|---|---|---|---|
| OBJ | Infinity | Infinity | - | Infinity | 0 |
| 1 | Infinity | 50 | - | 5 | 0 |
| STO | −21.292 | 3.5 | SILICA | 8 | 0 |
| 3 | Infinity | 400 | - | 8 | 0 |
| 4 | Infinity | 10 | SILICA | 55 | 0 |
| 5 | −209.827 | 50 | - | 55 | −0.524 |
| IMA | Infinity | - | - | 50.098 | 0 |
| Sampling | RMS/λ |
|---|---|
| 98% | 0.0863 |
| 90% | 0.0783 |
| 80% | 0.0480 |
| 50% | 0.0194 |
| 20% | 0.0121 |
| 10% | 0.0114 |
| 2% | 0.0110 |
| Work Conditions | RMS/m | PV/m |
|---|---|---|
| 30° (tilt placement) | 9.0276 × 10−9 (λ/70.1) | 5.80369 × 10−8 (λ/11) |
| 90° (horizontal placement) | 7.25 × 10−9 (λ/87) | 2.4842 × 10−8 (λ/25.5) |
| Serial Number | Type | Average Signal Amplitude/MHz | Noises | Detection Height/km (SNR = 3) | Interference |
|---|---|---|---|---|---|
| ADA0118(G) | R7400-20 | 3.349 | 0.00257 | 39.56 | - |
| ALA4281 | R7400-20 | 7.454 | 0.00526 | 40.15 | Yes |
| ADA0106(G) | R7400-20 | 9.812 | 0.00365 | 45.77 | - |
| BCD6334 | R9880-20 | 31.34 | 0.01085 | 47.79 | - |
| AAA0564 | R7400-02 | 19.85 | 0.00623 | 48.13 | Yes |
| HB7794(G) | P03g | 28.06 | 0.00697 | 48.71 | - |
| AAA0545(G) | R7400-02 | 34.06 | 0.00902 | 49.18 | - |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Xie, C.; Zhao, M.; Ji, J.; Wang, B.; Xing, K. Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver. Remote Sens. 2023, 15, 952. https://doi.org/10.3390/rs15040952
Chen J, Xie C, Zhao M, Ji J, Wang B, Xing K. Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver. Remote Sensing. 2023; 15(4):952. https://doi.org/10.3390/rs15040952
Chicago/Turabian StyleChen, Jianfeng, Chenbo Xie, Ming Zhao, Jie Ji, Bangxin Wang, and Kunming Xing. 2023. "Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver" Remote Sensing 15, no. 4: 952. https://doi.org/10.3390/rs15040952