
Detection of the Large Surface Explosion Coupling Experiment by a Sparse Network of Balloon-Borne Infrasound Sensors

Abstract
:1. Introduction
2. The Experiment and Balloon Deployment
2.1. The Large Surface Explosion Coupling Experiment
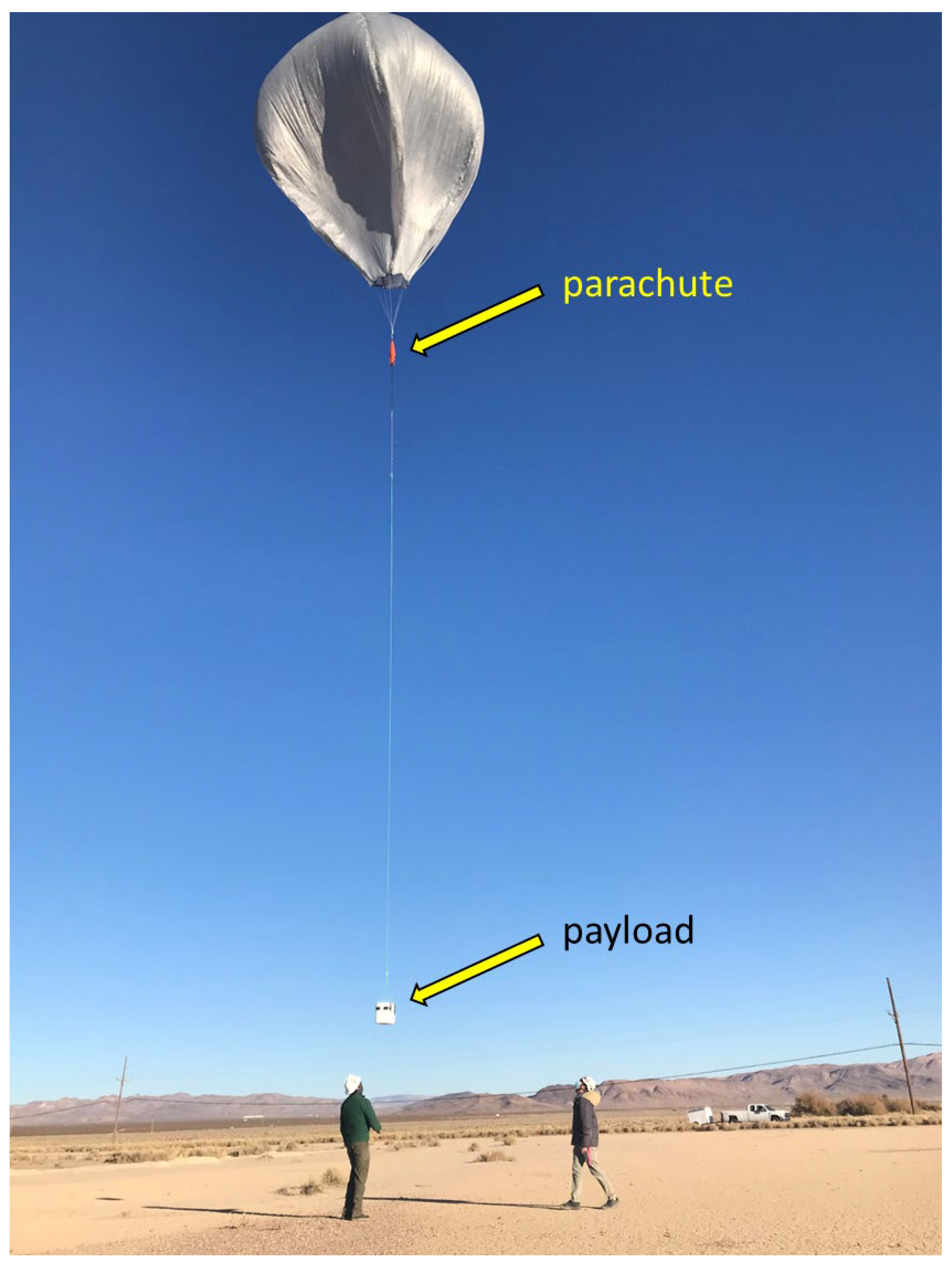
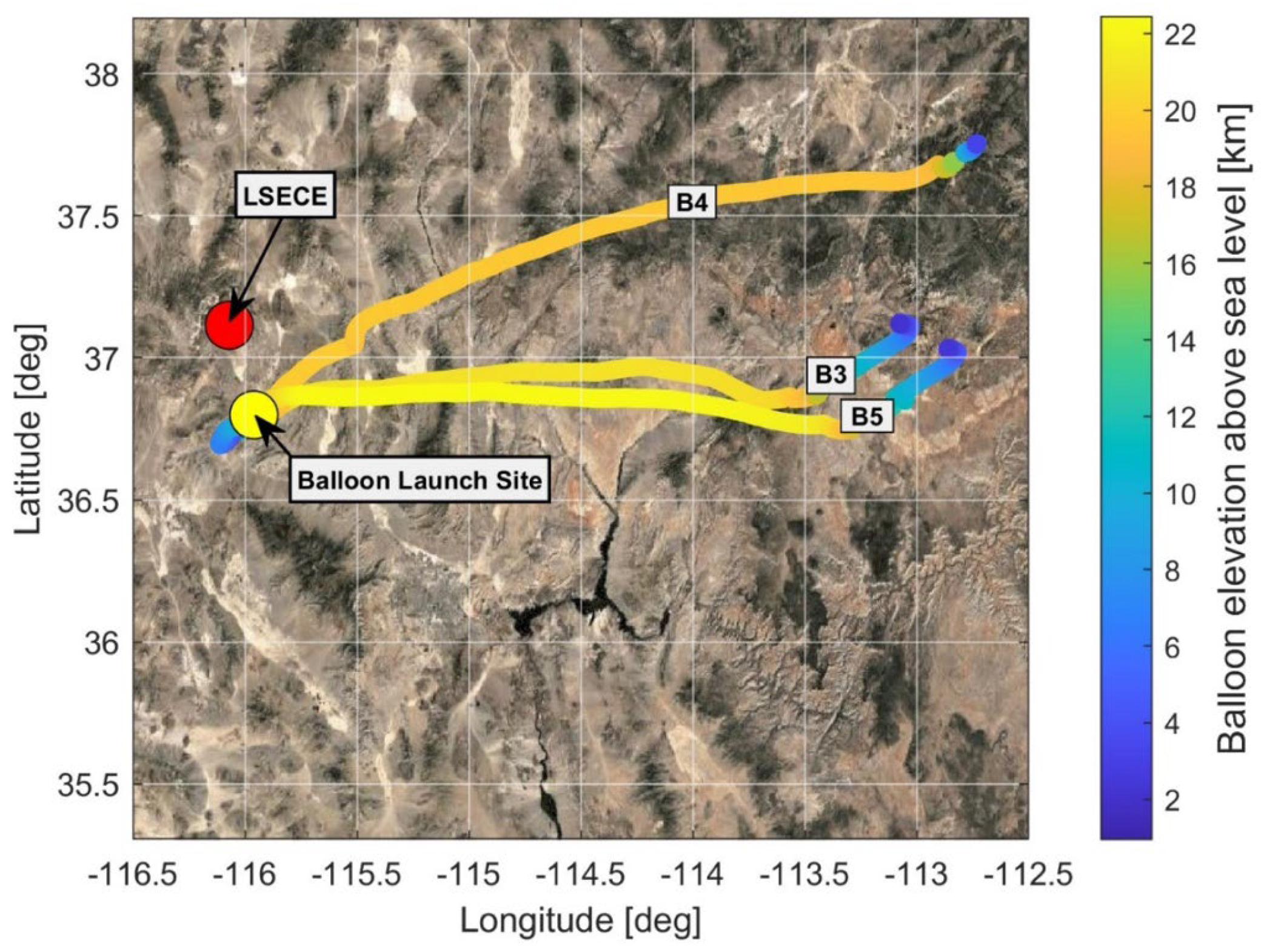
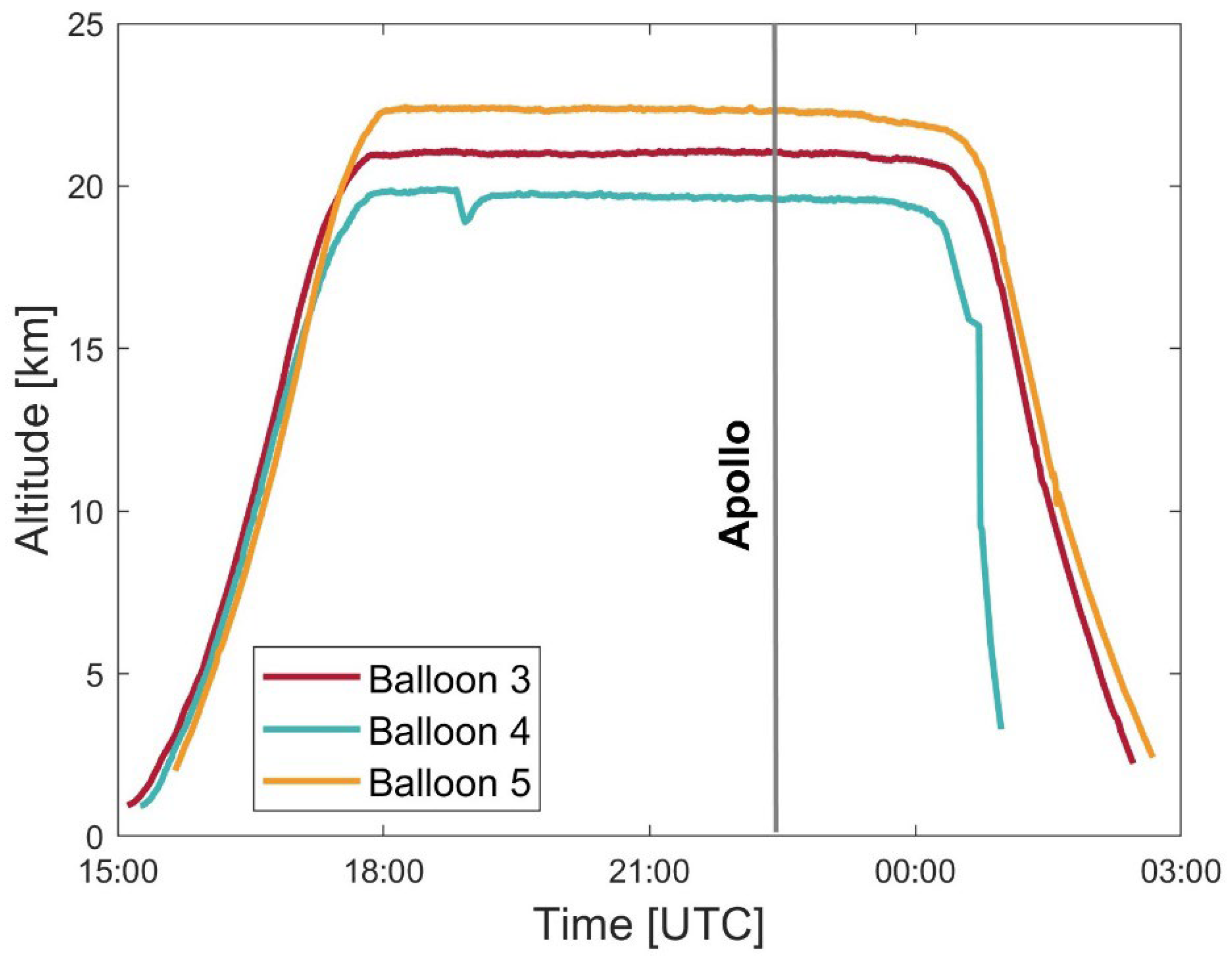
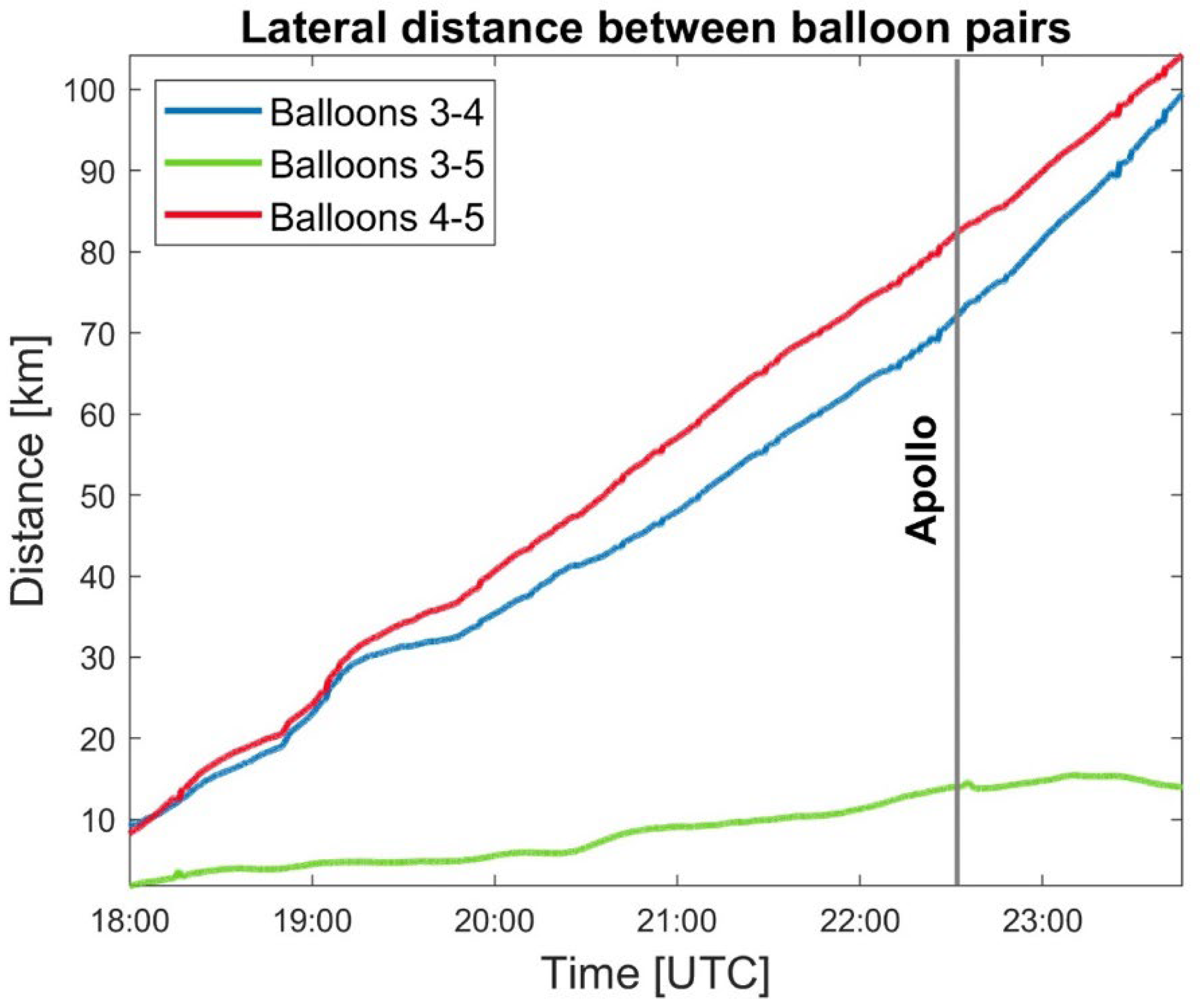
2.2. Balloon Deployment
3. Infrasound Detections
3.1. Predicted Signal Arrivals
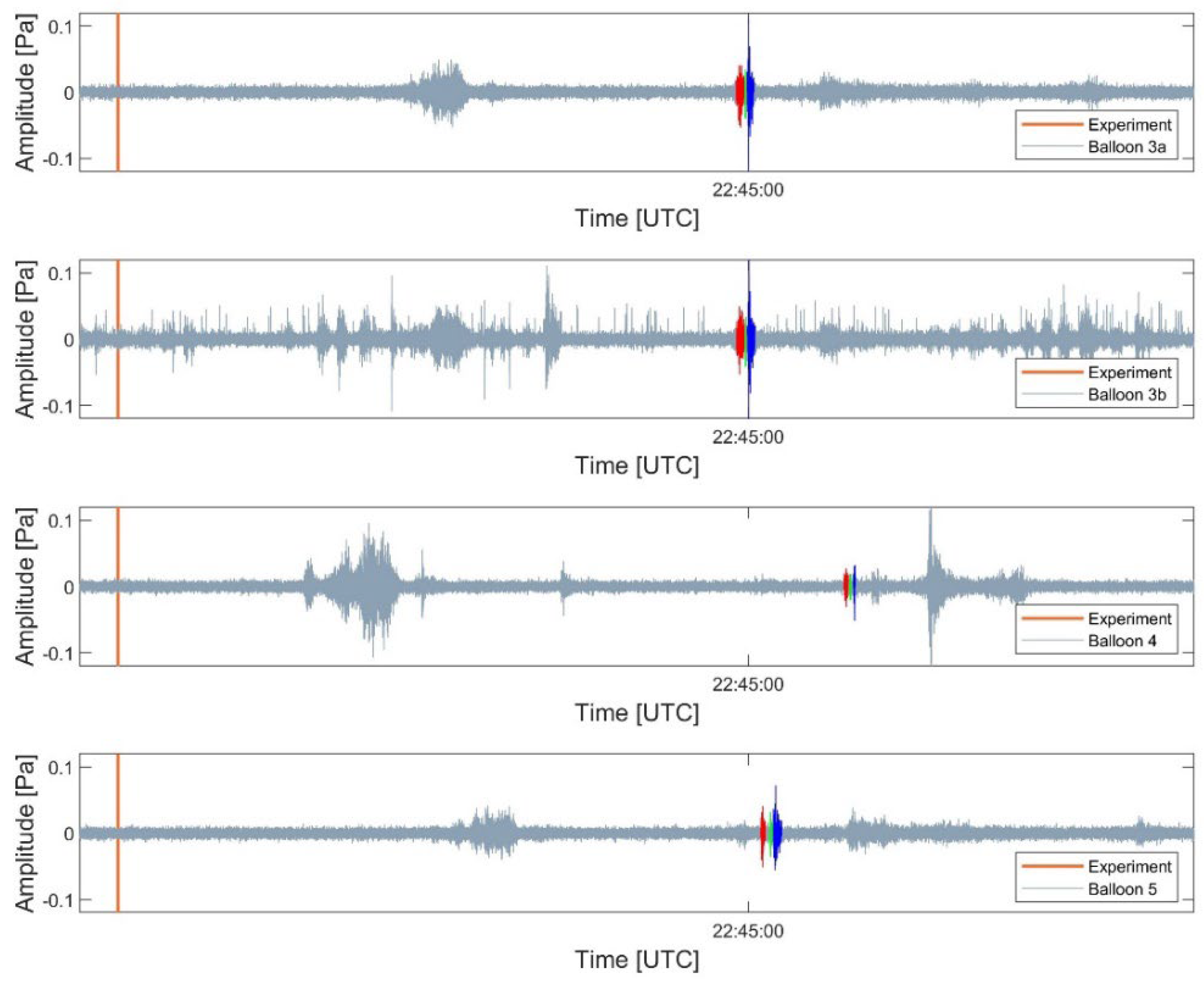
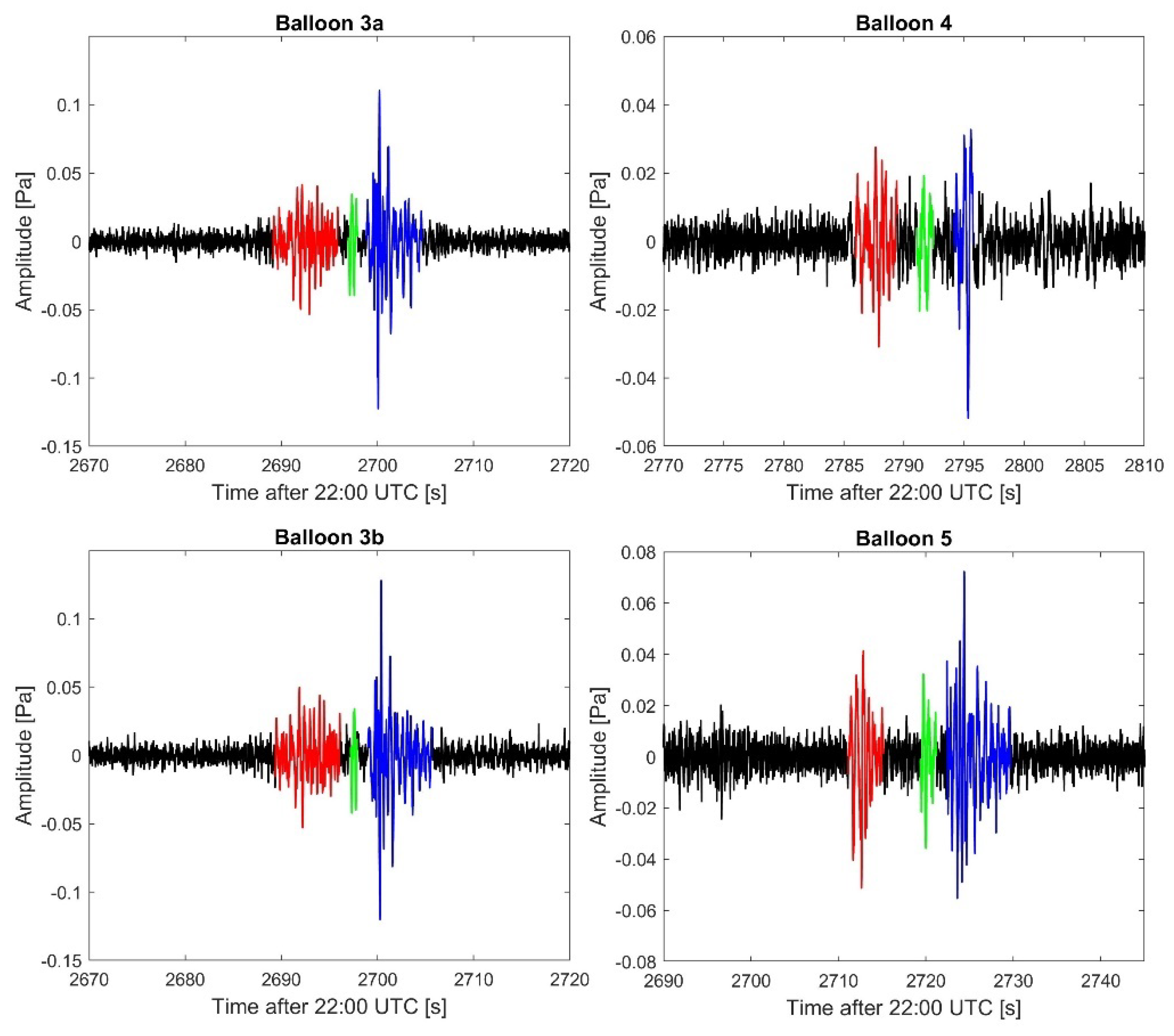
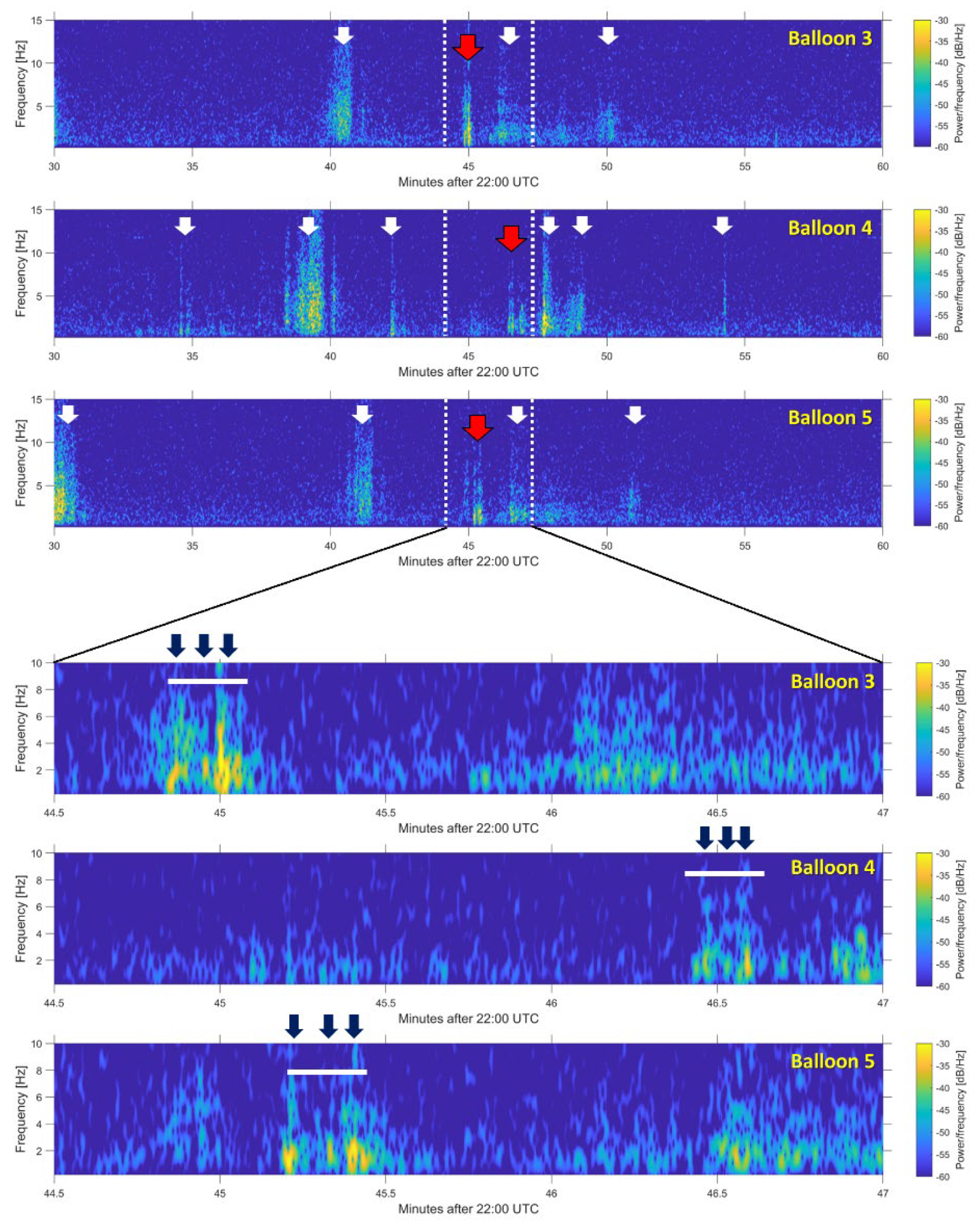
3.2. Infrasound Signal Detections
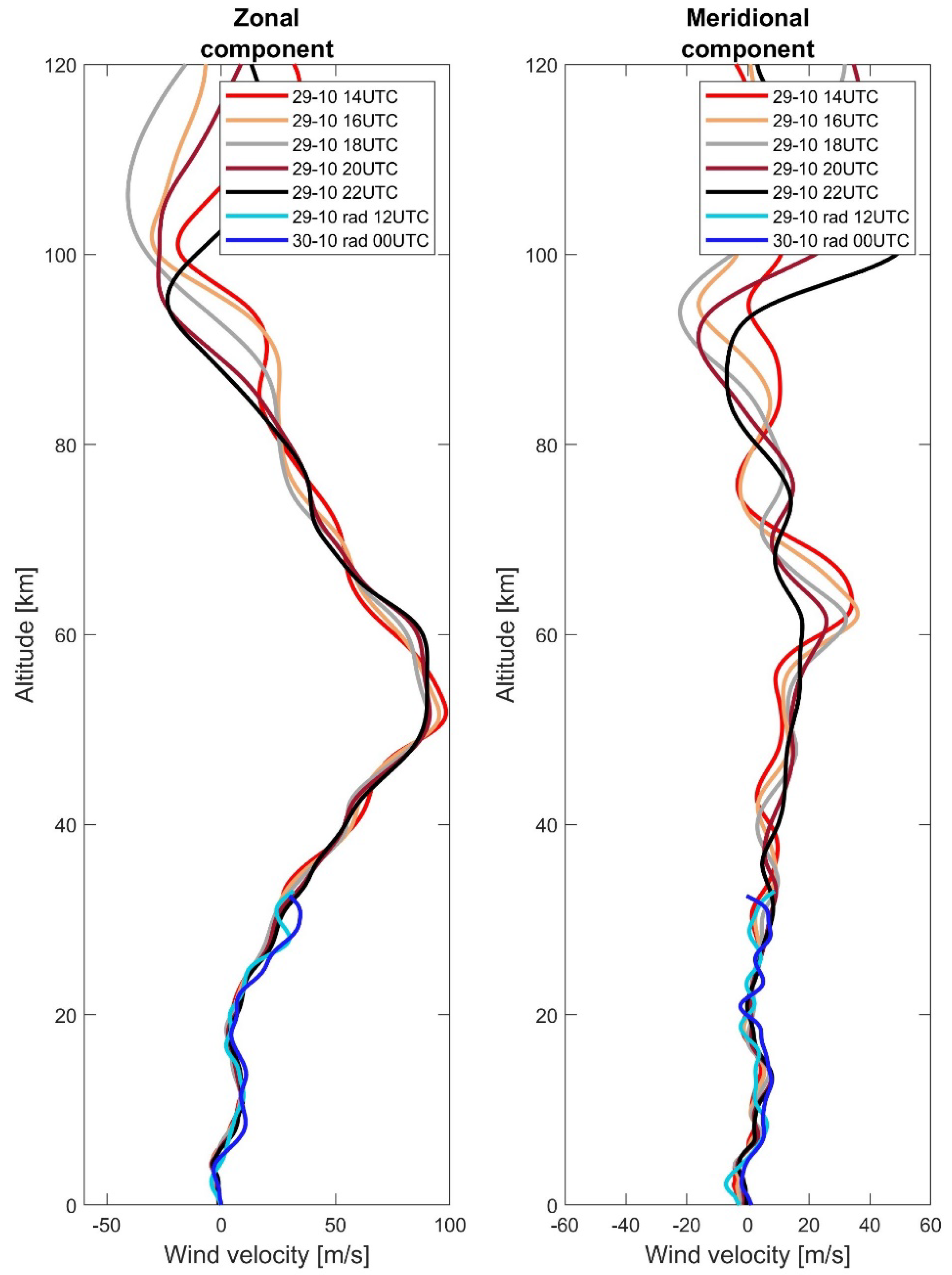
4. Propagation Modeling
5. Discussion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bedard, A.; Georges, T. Atmospheric infrasound. Acoust. Aust. 2000, 28, 47–52. [Google Scholar] [CrossRef]
- Silber, E.A.; ReVelle, D.O.; Brown, P.G.; Edwards, W.N. An estimate of the terrestrial influx of large meteoroids from infrasonic measurements. J. Geophys. Res. 2009, 114, E08006. [Google Scholar] [CrossRef] [Green Version]
- Green, D.N.; Vergoz, J.; Gibson, R.; Le Pichon, A.; Ceranna, L. Infrasound radiated by the Gerdec and Chelopechene explosions: Propagation along unexpected paths. Geophys. J. Int. 2011, 185, 890–910. [Google Scholar] [CrossRef] [Green Version]
- Matoza, R.S.; Hedlin, M.A.H.; Garcés, M.A. An infrasound array study of Mount St. Helens. J. Volcanol. Geotherm. Res. 2007, 160, 249–262. [Google Scholar] [CrossRef]
- Evans, L.B.; Bass, H.E.; Sutherland, L.C. Atmospheric Absorption of Sound: Theoretical Predictions. J. Acoust. Soc. Am. 1972, 51, 1565–1575. [Google Scholar] [CrossRef]
- Christie, D.R.; Campus, P. The IMS infrasound network: Design and establishment of infrasound stations. In Infrasound Monitoring for Atmospheric Studies; Springer: Berlin/Heidelberg, Germany, 2010; pp. 29–75. [Google Scholar]
- Evers, L.G.; Haak, H.W. The Characteristics of Infrasound, its Propagation and Some Early History. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 3–27. [Google Scholar]
- Brachet, N.; Brown, D.; Le Bras, R.; Cansi, Y.; Mialle, P.; Coyne, J. Monitoring the earth’s atmosphere with the global IMS infrasound network. In Infrasound Monitoring for Atmospheric Studies; Springer: Berlin/Heidelberg, Germany, 2010; pp. 77–118. [Google Scholar]
- Wescott, J.W. Acoustic Detection of High-Altitude Turbulence; Michigan Univ. Ann Arbor: Ann Arbor, MI, USA, 1964; p. 62. [Google Scholar]
- Weaver, R.L.; McAndrew, J. The Roswell Report: Fact versus Fiction in the New Mexico Desert; 1428994920; Diane Publishing: Collingdale, PA, USA, 1995; p. 881. [Google Scholar]
- Bowman, D.C.; Young, E.F.; Krishnamoorthy, S.; Lees, J.M.; Albert, S.A.; Komjathy, A.; Cutts, J. Geophysical and Planetary Acoustics via Balloon Borne Platforms; Sandia National Lab. (SNL-NM): Albuquerque, NM, USA, 2018. [Google Scholar]
- Young, E.F.; Bowman, D.C.; Lees, J.M.; Klein, V.; Arrowsmith, S.J.; Ballard, C. Explosion-generated infrasound recorded on ground and airborne microbarometers at regional distances. Seismol. Res. Lett. 2018, 89, 1497–1506. [Google Scholar] [CrossRef]
- Poler, G.; Garcia, R.F.; Bowman, D.C.; Martire, L. Infrasound and gravity waves over the Andes observed by a pressure sensor on board a stratospheric balloon. J. Geophys. Res. Atmos. 2020, 125, e2019JD031565. [Google Scholar] [CrossRef]
- Bowman, D.C.; Lees, J.M. Upper Atmosphere Heating from Ocean-Generated Acoustic Wave Energy. Geophys. Res. Lett. 2018, 45, 5144–5150. [Google Scholar] [CrossRef]
- Bowman, D.C.; Albert, S.A. Acoustic event location and background noise characterization on a free flying infrasound sensor network in the stratosphere. Geophys. J. Int. 2018, 213, 1524–1535. [Google Scholar] [CrossRef] [Green Version]
- Krishnamoorthy, S.; Bowman, D.C.; Komjathy, A.; Pauken, M.T.; Cutts, J.A. Origin and mitigation of wind noise on balloon-borne infrasound microbarometers. J. Acoust. Soc. Am. 2020, 148, 2361. [Google Scholar] [CrossRef]
- Brissaud, Q.; Krishnamoorthy, S.; Jackson, J.M.; Bowman, D.C.; Komjathy, A.; Cutts, J.A.; Zhan, Z.; Pauken, M.T.; Izraelevitz, J.S.; Walsh, G.J. The First Detection of an Earthquake from a Balloon Using Its Acoustic Signature. Geophys. Res. Lett. 2021, 48, e2021GL093013. [Google Scholar] [CrossRef] [PubMed]
- Garcia, R.F.; Klotz, A.; Hertzog, A.; Martin, R.; Gérier, S.; Kassarian, E.; Bordereau, J.; Venel, S.; Mimoun, D. Infrasound from Large Earthquakes Recorded on a Network of Balloons in the Stratosphere. Geophys. Res. Lett. 2022, 49, e2022GL098844. [Google Scholar] [CrossRef]
- Podglajen, A.; Le Pichon, A.; Garcia, R.F.; Gérier, S.; Millet, C.; Bedka, K.; Khlopenkov, K.; Khaykin, S.; Hertzog, A. Stratospheric Balloon Observations of Infrasound Waves From the 15 January 2022 Hunga Eruption, Tonga. Geophys. Res. Lett. 2022, 49, e2022GL100833. [Google Scholar] [CrossRef]
- Bowman, D.C. Airborne Infrasound Makes a Splash. Geophys. Res. Lett. 2021, 48, e2021GL096326. [Google Scholar] [CrossRef]
- Bowman, D.C.; Krishnamoorthy, S. Infrasound from a buried chemical explosion recorded on a balloon in the lower stratosphere. Geophys. Res. Lett. 2021, 48, e2021GL094861. [Google Scholar] [CrossRef]
- Bowman, D.C.; Norman, P.E.; Pauken, M.T.; Albert, S.A.; Dexheimer, D.; Yang, X.; Krishnamoorthy, S.; Komjathy, A.; Cutts, J.A. Multihour stratospheric flights with the heliotrope solar hot-air balloon. J. Atmos. Ocean. Technol. 2020, 37, 1051–1066. [Google Scholar] [CrossRef]
- Anderson, J.F.; Johnson, J.B.; Bowman, D.C.; Ronan, T.J. The Gem infrasound logger and custom-built instrumentation. Seismol. Res. Lett. 2018, 89, 153–164. [Google Scholar] [CrossRef]
- Bar-Yehuda, Z. Plot_Google_Map. 2022. Available online: https://github.com/zoharby/plot_google_map (accessed on 20 November 2022).
- Rost, S.; Thomas, C. Array seismology: Methods and applications. Rev. Geophys. 2002, 40, 2-1-2-27. [Google Scholar] [CrossRef] [Green Version]
- Evers, L.G.; Haak, H.W. Tracing a meteoric trajectory with infrasound. Geophys. Res. Lett. 2003, 30, 1–4. [Google Scholar] [CrossRef]
- Garces, M.A. On infrasound standards, Part 1 time, frequency, and energy scaling. InfraMatics 2013, 2, 23. [Google Scholar] [CrossRef]
- Beer, T. Atmospheric Waves; Halsted Press: New York, NY, USA; Adam Hilger, Ltd.: London, UK, 1974; Volume 1, p. 315. [Google Scholar]
- Negraru, P.T.; Herrin, E.T. On Infrasound Waveguides and Dispersion. Seismol. Res. Lett. 2009, 80, 565–571. [Google Scholar] [CrossRef]
- Drob, D.P.; Picone, J.M.; Garces, M. Global morphology of infrasound propagation. J. Geophys. Res. 2003, 108, 1–12. [Google Scholar] [CrossRef]
- Drob, D.P.; Garces, M.; Hedlin, M.; Brachet, N. The Temporal Morphology of Infrasound Propagation. Pure Appl. Geophys. 2010, 167, 437–453. [Google Scholar] [CrossRef]
- Negraru, P.T.; Golden, P.; Herrin, E.T. Infrasound Propagation in the “Zone of Silence”. Seismol. Res. Lett. 2010, 81, 614–624. [Google Scholar] [CrossRef]
- Kulichkov, S. On infrasonic arrivals in the zone of geometric shadow at long distances from surface explosions. In Proceedings of the Ninth Annual Symposium on Long-Range Propagation, Amsterdam, The Netherlands, 14–15 September 2000; pp. 238–251. [Google Scholar]
- Silber, E.A.; Brown, P.G. Optical observations of meteors generating infrasound—I: Acoustic signal identification and phenomenology. J. Atmos. Sol. Terr. Phys. 2014, 119, 116–128. [Google Scholar] [CrossRef] [Green Version]
- Dziewonski, A.; Hales, A. Numerical analysis of dispersed seismic waves. Seismol. Surf. Waves Earth Oscil. 1972, 11, 39–84. [Google Scholar]
- Revelle, D.O. Historical Detection of Atmospheric Impacts by Large Bolides Using Acoustic-Gravity Wavesa. Ann. N. Y. Acad. Sci. 1997, 822, 284–302. [Google Scholar] [CrossRef] [Green Version]
- Blom, P.; Waxler, R. Modeling and observations of an elevated, moving infrasonic source: Eigenray methods. J. Acoust. Soc. Am. 2017, 141, 2681–2692. [Google Scholar] [CrossRef]
- Le Pichon, A.; Vergoz, J.; Blanc, E.; Guilbert, J.; Ceranna, L.; Evers, L.; Brachet, N. Assessing the performance of the International Monitoring System’s infrasound network: Geographical coverage and temporal variabilities. J. Geophys. Res. 2009, 114, D08112. [Google Scholar] [CrossRef] [Green Version]
- Chunchuzov, I.; Kulichkov, S.; Perepelkin, V.; Popov, O.; Firstov, P.; Assink, J.D.; Marchetti, E. Study of the wind velocity-layered structure in the stratosphere, mesosphere, and lower thermosphere by using infrasound probing of the atmosphere. J. Geophys. Res. Atmos. 2015, 120, 8828–8840. [Google Scholar] [CrossRef]
- Green, D.N.; Nippress, A. Infrasound signal duration: The effects of propagation distance and waveguide structure. Geophys. J. Int. 2019, 216, 1974–1988. [Google Scholar] [CrossRef]
- Dumond, J.W.M.; Cohen, R.; Panofsky, W.K.H.; Deeds, E. A Determination of the Wave Forms and Laws of Propagation and Dissipation of Ballistic Shock Waves. J. Acoust. Soc. Am. 1946, 18, 97–118. [Google Scholar] [CrossRef] [Green Version]
- ReVelle, D. Acoustics of Meteors-effects of the atmospheric temperature and wind structure on the sounds produced by meteors. PhD Thesis, Michigan University Ann Arbor, Ann Harbor, MI, USA, 1974. [Google Scholar]
- Bowman, J.; Baker, G.; Bahavar, M. Infrasound Station Ambient Noise Estimates. In Proceedings of the 26th Seismic Research Review, Orlando, FL, USA, 21–23 September 2004. [Google Scholar]
- Reed, J.W. Climatology of Airblast Propagation from Nevada Test Site Nuclear Airblasts; Tech. Rep. SC-RR-69-572; SANDIA CORP: Albuquerque, NM, USA, 1969. [Google Scholar]
- Garces, M.A.; Hansen, R.A.; Lindquist, K.G. Traveltimes for infrasonic waves propagating in a stratified atmosphere. Geophys. J. Int. 1998, 135, 255–263. [Google Scholar] [CrossRef] [Green Version]
- Kulichkov, S. Long-range propagation and scattering of low-frequency sound pulses in the middle atmosphere. Meteorol. Atmos. Phys. 2004, 85, 47–60. [Google Scholar] [CrossRef]
- Kulichkov, S. On the Prospects for Acoustic Sounding of the Fine Structure of the Middle Atmosphere. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2009; pp. 511–540. [Google Scholar]
- Silber, E.A.; Le Pichon, A.; Brown, P.G. Infrasonic detection of a near-Earth object impact over Indonesia on 8 October 2009. Geophys. Res. Lett. 2011, 38, L12201. [Google Scholar] [CrossRef]
- Hedlin, M.A.H.; Walker, K.T. A study of infrasonic anisotropy and multipathing in the atmosphere using seismic networks. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2013, 371, 20110542. [Google Scholar] [CrossRef] [Green Version]
- Kulichkov, S.; Chunchuzov, I.; Bush, G.; Perepelkin, V. Physical modeling of long-range infrasonic propagation in the atmosphere. Izv. Atmos. Ocean. Phys. 2008, 44, 175–186. [Google Scholar] [CrossRef]
- Gibson, R.G.; Drob, D.P.; Broutman, D.; Winslow, N.W. Advancement of techniques for modeling the effects of atmospheric gravity-wave-induced inhomogeneities on infrasound propagation. In Proceedings of the 2010 Monitoring Research Review: Ground-Based Nuclear Explosion Monitoring Technologies, Orlando, FL, USA, 21–23 September 2010. [Google Scholar]
- Norris, D.; Gibson, R.; Bongiovanni, K. Numerical Methods to Model Infrasonic Propagation Through Realistic Specifications of the Atmosphere. In Infrasound Monitoring for Atmospheric Studies; Le Pichon, A., Blanc, E., Hauchecorne, A., Eds.; Springer: Dordrecht, The Netherlands, 2010; pp. 541–573. [Google Scholar]
- Chunchuzov, I. Influence of internal gravity waves on sound propagation in the lower atmosphere. Meteorol. Atmos. Phys. 2004, 85, 61–76. [Google Scholar] [CrossRef]
- Pilger, C.; Streicher, F.; Ceranna, L.; Koch, K. Application of propagation modeling to verify and discriminate ground-truth infrasound signals at regional distances. InfraMatics 2013, 2013, 39–55. [Google Scholar] [CrossRef] [Green Version]
- Ceranna, L.; Le Pichon, A.; Green, D.N.; Mialle, P. The Buncefield explosion: A benchmark for infrasound analysis across Central Europe. Geophys. J. Int. 2009, 177, 491–508. [Google Scholar] [CrossRef] [Green Version]
- Kulichkov, S.N.; Chunchuzov, I.P.; Popov, O.I. Simulating the influence of an atmospheric fine inhomogeneous structure on long-range propagation of pulsed acoustic signals. Izv. Atmos. Ocean. Phys. 2010, 46, 60–68. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Balloon | Signal Arrival Time | Signal Travel Time | Balloon Latitude | Balloon Longitude | Balloon Altitude | Distance | Signal Celerity | Signal Duration |
|---|---|---|---|---|---|---|---|---|
| [hh:mm:ss] | [s] | [°] | [°] | [km] | [km] | [m/s] | [s] | |
| 3a | 22:44:49.14 | 554.8 | 36.95912 | −114.12965 | 20.99 | 173.1 | 312.0 | 6.8 |
| 22:44:56.97 | 562.7 | 36.95905 | −114.12909 | 20.99 | 173.1 | 307.6 | 1.0 | |
| 22:44:58.85 | 564.6 | 36.95903 | −114.12890 | 20.99 | 173.1 | 306.6 | 5.8 | |
| 3b | 22:44:49.37 | 555.1 | 36.95912 | −114.12965 | 20.99 | 173.1 | 311.8 | 6.8 |
| 22:44:57.21 | 562.9 | 36.95905 | −114.12909 | 20.99 | 173.1 | 307.6 | 0.7 | |
| 22:44:59.03 | 564.7 | 36.95903 | −114.12890 | 20.99 | 173.2 | 306.6 | 6.6 | |
| 4 | 22:46:25.98 | 651.7 | 37.58252 | −113.76089 | 19.61 | 210.6 | 323.2 | 3.5 |
| 22:46:31.07 | 656.8 | 37.58252 | −113.76091 | 19.61 | 210.6 | 320.7 | 1.4 | |
| 22:46:34.19 | 659.9 | 37.58255 | −113.76116 | 19.59 | 210.6 | 319.2 | 1.6 | |
| 5 | 22:45:11.15 | 576.9 | 36.84854 | −114.05320 | 22.26 | 181.6 | 314.8 | 4.0 |
| 22:45:19.39 | 585.1 | 36.84848 | −114.05230 | 22.26 | 181.7 | 310.5 | 1.8 | |
| 22:45:22.42 | 588.1 | 36.84846 | −114.05196 | 22.26 | 181.7 | 308.9 | 7.3 |
| Balloon | Peak Amplitude, Amax | P2P Amplitude | Period at Amax |
|---|---|---|---|
| [Pa] | [Pa] | [s] | |
| 3a | 0.1218 | 0.2328 | 0.37 ± 0.06 |
| 3b | 0.1267 | 0.2462 | 0.37 ± 0.07 |
| 4 | 0.0517 | 0.0844 | 0.54 ± 0.04 |
| 5 | 0.0724 | 0.1210 | 0.48 ± 0.06 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Silber, E.A.; Bowman, D.C.; Ronac Giannone, M. Detection of the Large Surface Explosion Coupling Experiment by a Sparse Network of Balloon-Borne Infrasound Sensors. Remote Sens. 2023, 15, 542. https://doi.org/10.3390/rs15020542
Silber EA, Bowman DC, Ronac Giannone M. Detection of the Large Surface Explosion Coupling Experiment by a Sparse Network of Balloon-Borne Infrasound Sensors. Remote Sensing. 2023; 15(2):542. https://doi.org/10.3390/rs15020542
Chicago/Turabian StyleSilber, Elizabeth A., Daniel C. Bowman, and Miro Ronac Giannone. 2023. "Detection of the Large Surface Explosion Coupling Experiment by a Sparse Network of Balloon-Borne Infrasound Sensors" Remote Sensing 15, no. 2: 542. https://doi.org/10.3390/rs15020542