2.1. Instrumentation
Detailed descriptions of the SQUID-5 system are provided in Hatcher et al. [
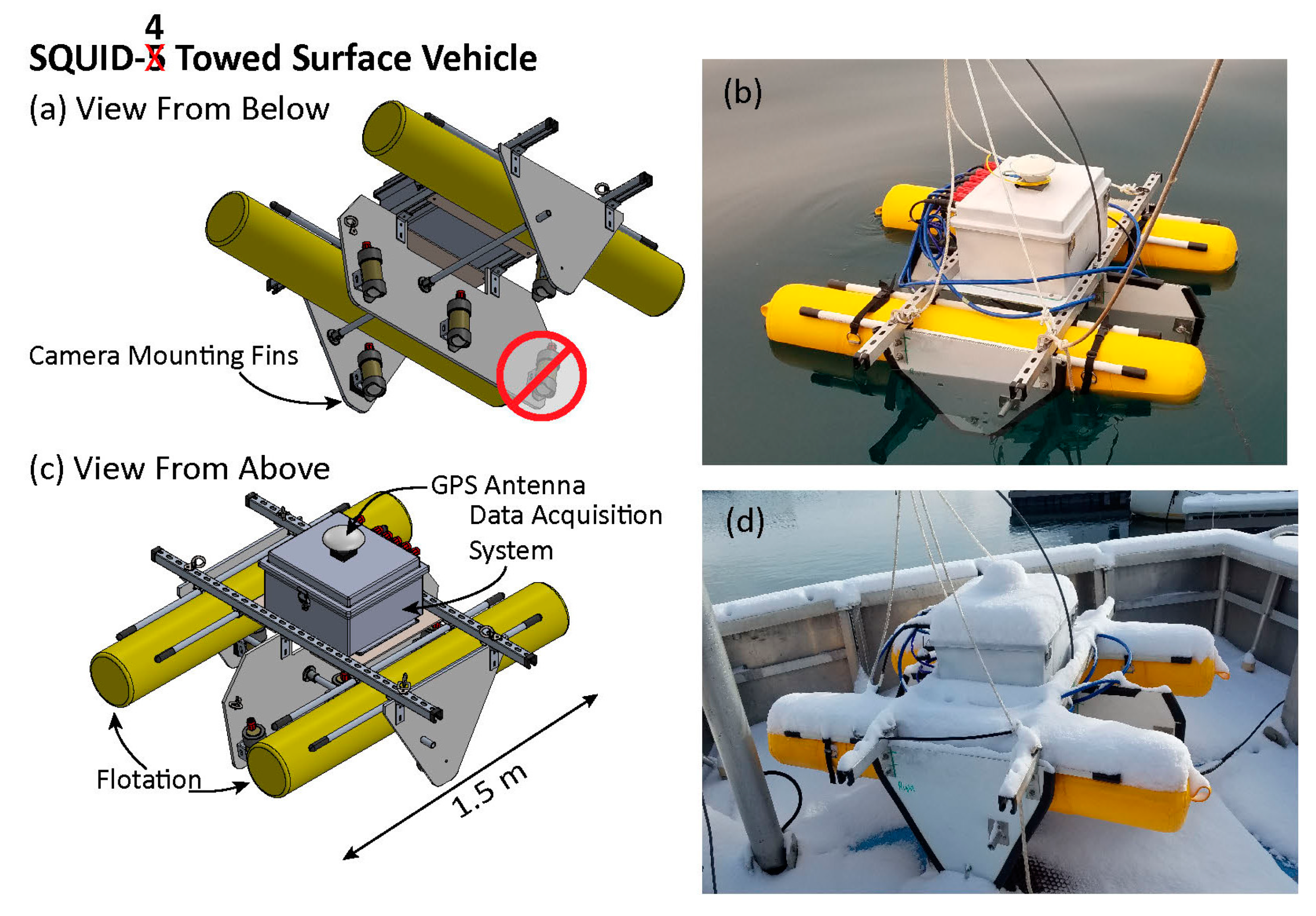
12], including engineering details found in the Supplemental Materials of that publication. Although we will not repeat these details here, we do provide a general description and report updates and modifications of the system. In general, SQUID-5 utilizes a rigid-framed vessel that is towed by a support boat providing power and remote-system controls (
Figure 1). Imagery is obtained from five synchronous 5.0 MP Teledyne FLIR™ visible color spectrum machine vision cameras, with the Sony™ IMX 264 CMOS sensor. Higher MP cameras were not required due to the limited distance from the seabed to the cameras. The lower-pixel-count cameras allowed for a faster sustained capture rate and reduced the overall data volume, while still providing sub-mm ground sample distances.
The small size of the cameras (approximately a 30 mm cube) allows for custom underwater housings, with hemispheric glass domes to minimize optical distortions. Positions of the cameras during operations are determined with the combination of survey-grade GNSS positions provided by a Trimble R7 receiver and Zephyr-2 antenna mounted onto the SQUID-5 system, and measured offsets between the antenna and the camera nodal points. Cameras are operated to collect synchronous imagery at 1 Hz. Tight synchronization between the cameras and GNSS resulted in positional uncertainties from temporal latencies that were more than two orders of magnitude less than the GNSS horizontal uncertainty of approximately 1.7 cm.
A primary update to the SQUID-5 system for this work was a comprehensive control and acquisition program that made field collections more efficient [
17]. The configuration of the navigation display was also upgraded to include a live stream of GNSS data to help with the difficult task of accurately towing the SQUID-5 sled over small target areas in real time. Additionally, while processing data from initial fieldwork in 2019, it was discovered that the center camera was often redundant with the other cameras and, in some instances, would introduce noise to SfM products from oversampling. Therefore, during the 2021 field operations, we investigated whether changing the center camera lens to a longer focal length (from 6 to 8 mm) would reduce redundancy and improve the data quality and resolution.
Operating the SQUID-5 system somewhat continuously over large areas provided the challenge of adequately collecting and managing the large volume of raw image data expected each survey day. For example, a single uncompressed RGB image requires approximately 15 MB of data storage, so collecting imagery at 1 Hz simultaneously from five cameras generates approximately 75 MB/s or 270 GB/h. Therefore, storage devices needed to be extremely fast to facilitate the terabyte scale of data collection and backup required each survey day. To facilitate this, a data acquisition computer mounted directly on the SQUID-5 tow vehicle stored the image data locally to an internal striped RAID 0 array comprised of four high-speed solid state hard drives. Although RAID 0 has the fastest throughput speed of all the present RAID configurations, it also has the highest probability of failure since the data are striped across all disks in the array, so failure of any one disk destroys the entire file structure. To reduce the risk of data loss, we included an additional backup storage system incorporating four high-speed solid-state hard drives configured as RAID 5 which is slightly slower but able to recover from a single disk failure. The backup storage system was co-located with the shipboard equipment in the protected lab space, and this network-attached RAID 5 storage system was regularly updated with backup copies of new data while the survey was underway. This resulted in the coincidental generation of backup data copies and new data acquisition. A third copy of the daily data was created at the end of each day on a single solid-state drive connected directly to the shipboard RAID 5 array using an eSATA connection. The goal was to process the third copy onshore each evening and generate initial provisional SfM alignment products to guide the survey by identifying data gaps or problem areas needing to be re-mapped.
2.3. Field Operations
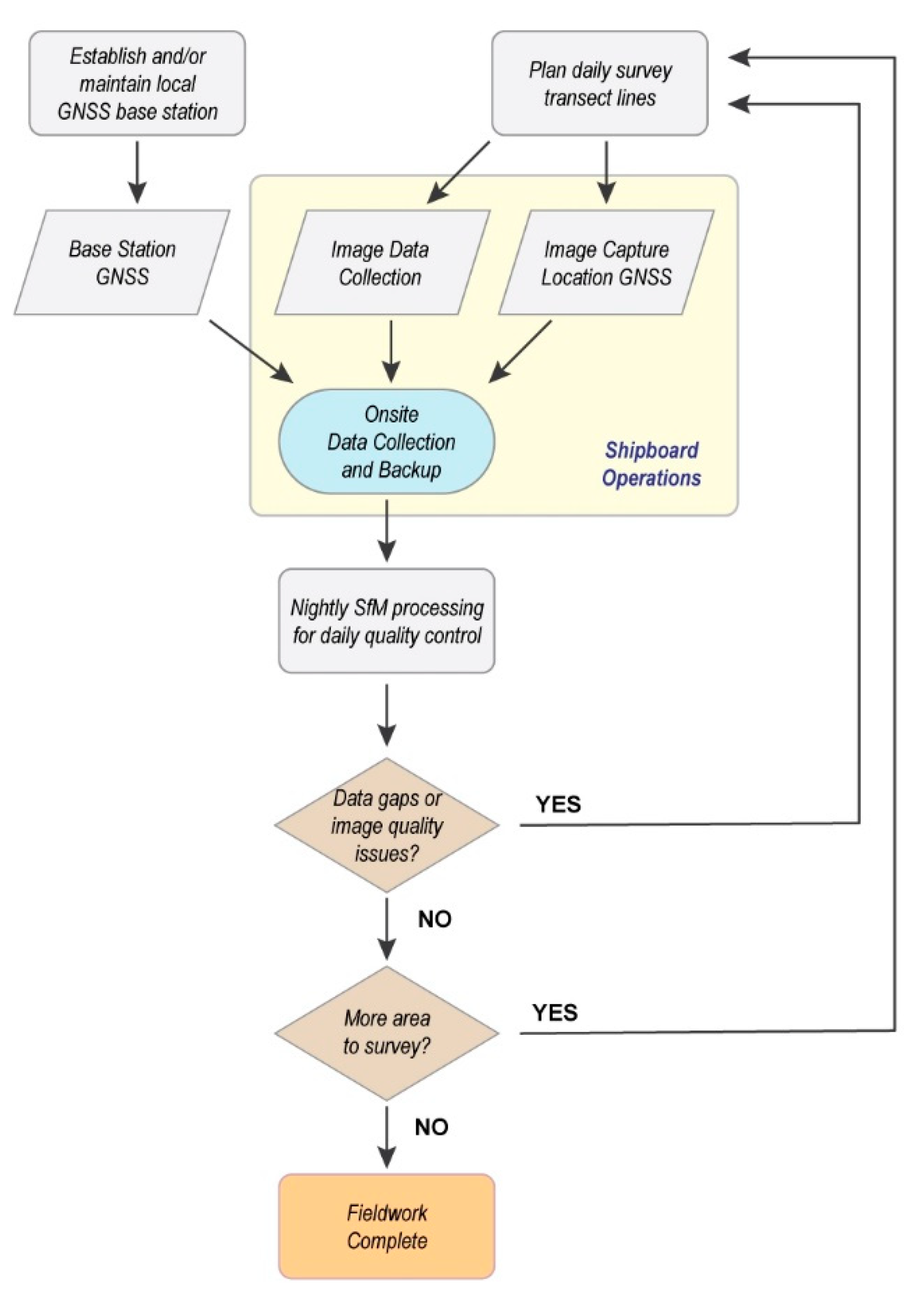
We conducted two sampling exercises to map the study area with the SQUID-5 system. The first field operation was conducted on 14–18 September 2020, but was hampered by excessive smoke conditions from local wildfires, which compromised our ability to conduct the survey, and GNSS data problems related to an unsuccessful attempt to integrate a low-cost dual-frequency GNSS with our survey-grade GNSS for testing purposes. In the end, a signal splitter used to incorporate both GNSSs resulted in compromised GNSS data that could not be used to generate accurate position data from either receiver. However, the limited data collection that occurred during this operation allowed us to realize that (i) the upgrades to our system, including data backup and data transfer, were successful; (ii) a field data collection and overnight data processing workflows were possible with a land-based processing computer (
Figure 3); (iii) the camera settings had optimal ranges of exposure times and sensor gains; and (iv) the 3 m line spacing used for data collection was generally adequate, as shown by provisional SfM alignment tests.
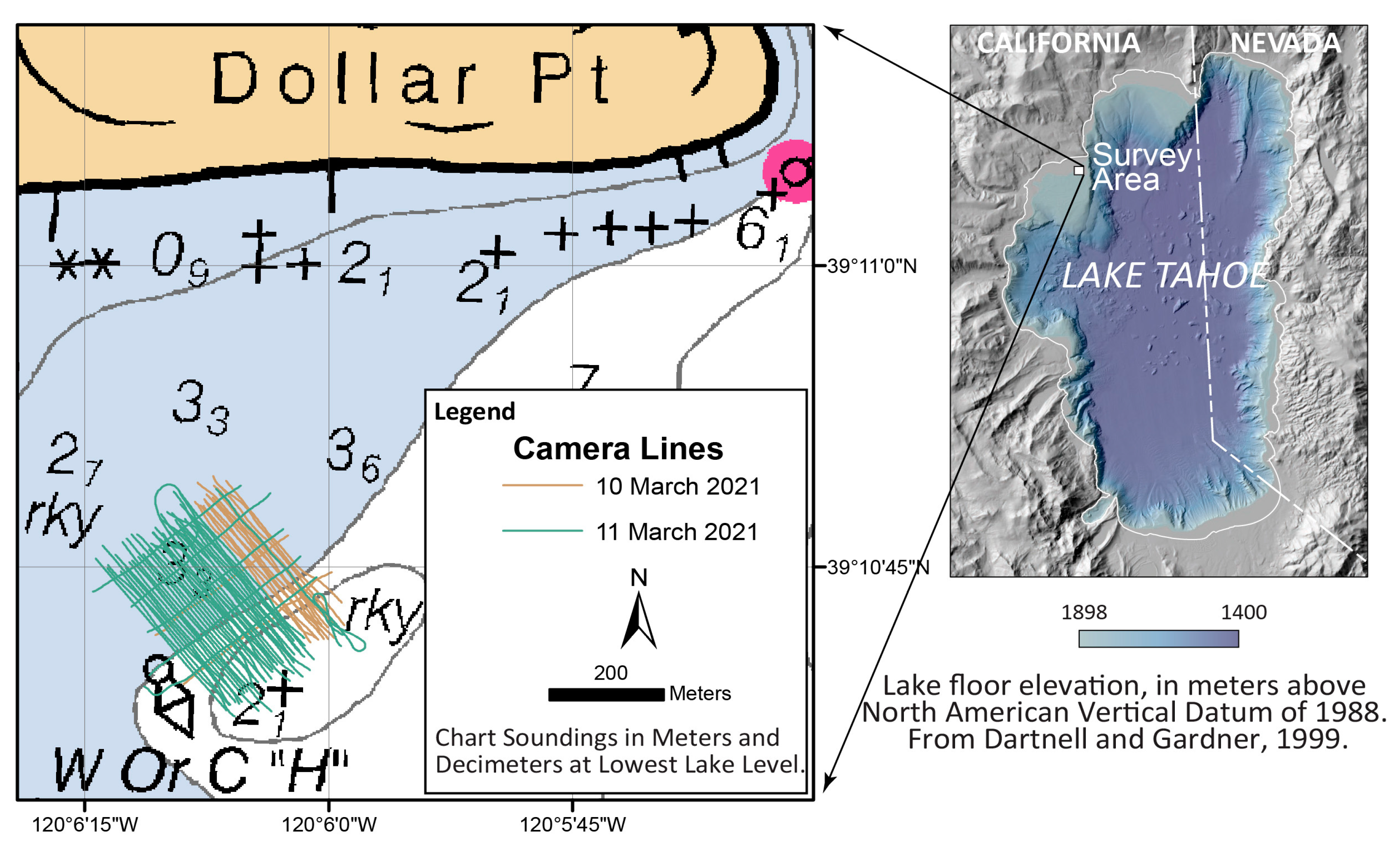
Thus, a second operation was conducted on 8–12 March 2021, which provided the data utilized in the analyses below. Conditions during these operations included periods of significant snowfall (
Figure 1d), which reduced visibility, and periods of gusty winds, which caused sustained surface waves as large as 0.5 m. The snow squalls were separated by short periods of sunny, clear blue sky that made the underwater lighting environment highly variable. The survey line layout included a series of 5 m spaced, northwest-to-southeast-trending parallel survey lines and several perpendicular lines across the survey area, which were completed with two days of survey operations (
Figure 2).
The cameras used are all the Teledyne FLIR ™ BFS-PGE-50S5C-C, with the Fujinon HF6XA-5M 6 mm fixed focal length lens on the forward and two outward cameras and the Fujinon HF8XA-5M 8 mm fixed focal length lens on the center downward camera. The system was towed at aproximately 1.5 m/s. To adjust for changing light conditons, the preference was to adjust only the sensor gain when possible and change the exposure time setting only when absolutely necessary for correct exposure. The exposure was adjusted for a slightly dark image to reduce the possibility of sensor saturation and image data loss. Based on results from both field collections, we empirically determined the optimal camera settings for our condions, listed in
Table 1.
2.4. Field Data Collection
During the March 2021 field operations, a local GNSS base station was temporarily installed at the TERC field station, which is roughly 2 km away from the survey site. The base station enabled location data from SQUID-5 to be corrected using Post Processing Kinematic (PPK) methods. Additionally, a NOAA Continuously Operating Reference Station (CORS) located within 15 km of our survey (P150) area was available for use during post-processing to generate final data products once we returned from the field. The raw GNSS data from the SQUID-5 were minimally processed each day to verify their integrity and to provide assurance that the event marks of image capture locations were properly logged (
Figure 3). Additional GNSS processing was conducted after the cruise for SfM data analyses, as described in
Section 2.5 below.
In addition to the SQUID-5 system changes described above, we also included a dual-antenna GNSS for the R/V John Le Conte, which provided real-time heading information, in addition to position, which were displayed in the live navigation software and allowed for better navigation. Unfortunately, the rear camera connection of SQUID-5 was found to be faulty immediately before the field operations, which limited our data collection to only the left, right, center, and front cameras (
Figure 1a). Otherwise, the survey was conducted as planned, resulting in 88 closely spaced survey lines at approximately 5 m line spacing and over an area approximately 250 meters by 235 meters (
Figure 2). The combined line spacing and camera geometry of the SQUID-5 system resulted in approximately 80% overlap and 50% sidelap in the imagery set collected from the multiple cameras, although these values varied spatially owing to the actual line spacing and water depths during the survey. The central camera, which obtained higher-resolution imagery owing to its lens, resulted in approximately 50% overlap and 20% sidelap, independently from the other cameras, suggesting that most of the study area would have been covered with these higher-resolution images. The raw camera imagery and post-processed GNSS position data are published and available, along with extensive metadata, in a USGS Data Release publication [
18].
2.5. SfM Data Processing
Our SfM data processing techniques follow the general considerations and workflow of Over et al. [
19], with modifications for multiple-camera underwater operations, as suggested by Hatcher et al. [
12]. The general workflow is represented graphically in
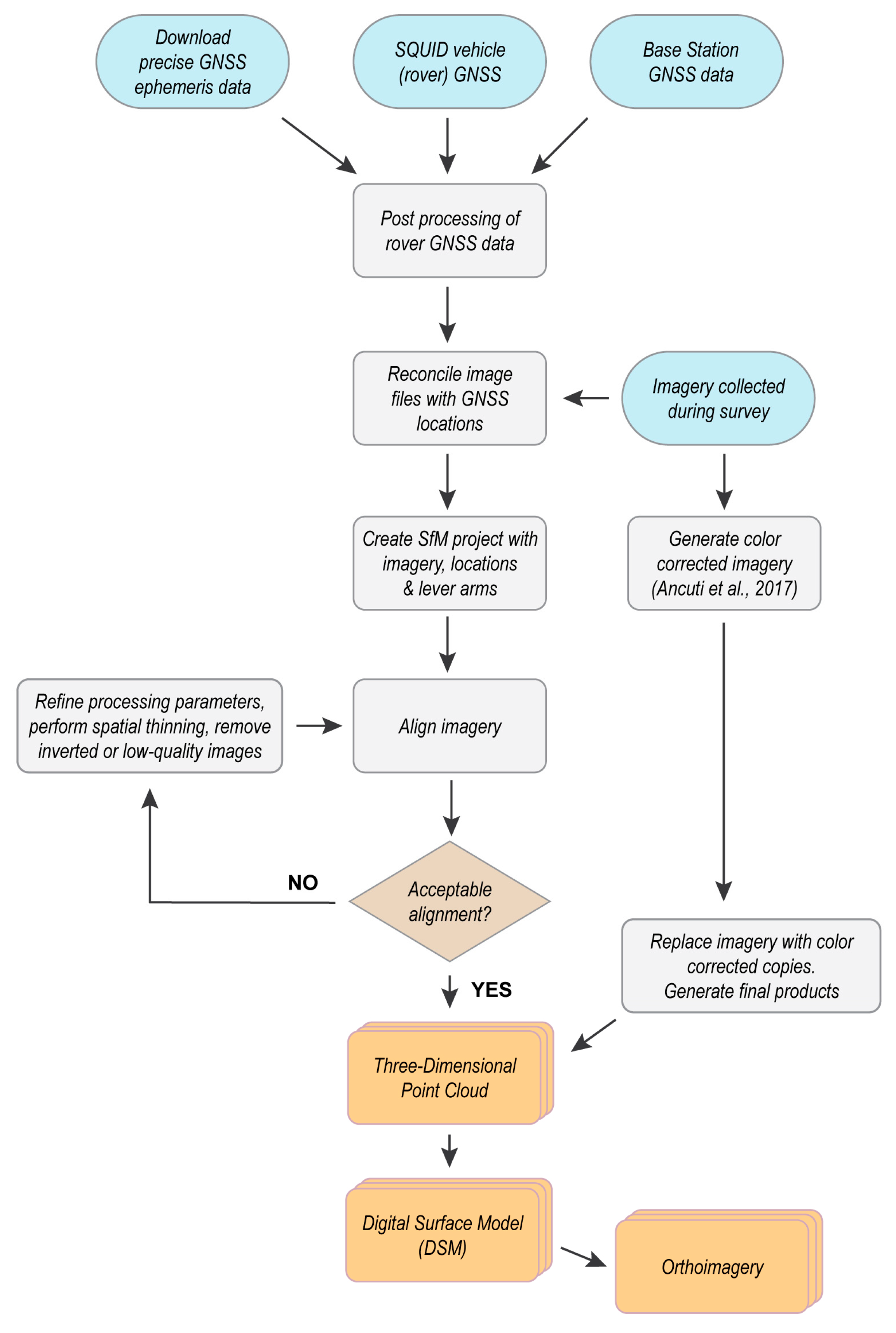
Figure 4, and further details are provided below. A key element of this workflow is the development of geospatial positions for the location of the SQUID-5 GNSS antenna for each image capture, because these data are used by the SfM software (Agisoft Metashape version 1.6.4.) with camera-to-GNSS antenna offsets, also referred to as “lever arms,” to compute the camera nodal positions for all images. These positions are derived from GNSS time event records recorded during field operations at the precise time of each image collection, and these positions are introduced to the SfM project by reconciling the positions with image file names (
Figure 4). The GNSS position data were processed after the precise ephemeris, and clock data were available using Post Processing Kinematic (PPK) techniques with NovAtel’s GrafNav software. GrafNav robustly filters and corrects outliers, making extensive use of Kalman filtering, and resulted in estimated 2-sigma uncertainties of 10 and 15 cm in the horizontal and vertical directions, respectively. As noted below, the reconciled GNSS positions were used as initial locations for each of the cameras and were refined further in the SfM alignment and optimizations, which resulted in mean position uncertainties of approximately 3 cm.
A total of 42,939 images and associated positions were collected within the study area during the March 2021 operations from the four cameras, and these data were used for SfM alignment, optimization, and product generation. Following the workflows of Hatcher et al. [
12], imagery were aligned in Metashape using the high setting, a maximum of 60,000 key points per image, unlimited tie points, and preselecting image-to-image matching using the imagery position data (
Figure 4). Additionally, we allowed the measured lever arm lengths to be adjusted with a total accuracy of 2.5 cm during the alignment, owing to the potential for physical shifting of the SQUID-5 system during transport and set up. We also assigned the camera positional accuracy to a conservative 2 cm in the horizontal and 6 cm in the vertical. This resulted in over 94.5 million tie points, or an average of ~2200 points per image. Tie points with the greatest uncertainty were removed using Metashape’s gradual selection tools, which were set to recommended thresholds for underwater collections: reconstruction uncertainty (RU) of 20, projection accuracy (PA) of 8, and reprojection error (RE) of 0.4 [
12]. Camera optimizations were completed twice, once after RU and PA were applied and once after RE, always using standard lens distortion parameters (f, cx, cy, k1, k2, k3, p1, p2). This reduced the number of tie points to slightly over 62.5 million and resulted in low camera position errors (x = 0.65 cm, y = 0.94 cm, z = 3.02 cm, total = 3.23 cm) and low camera lens residual errors (all residuals throughout each 2D model were less than 0.25 pixels). We note that the alignment process may identify poor-quality imagery or position data, or the gradual selection process may remove too many tie points for an adequate alignment, and under these conditions, users may revise PU, PA, or RE settings; thin imagery to a desired level of overlap in the along- or across-transect direction (“spatial thinning”); or remove erroneous imagery or position data, before re-aligning the data (
Figure 4) [
12,
19]. Our data collection did not require any of these corrections.
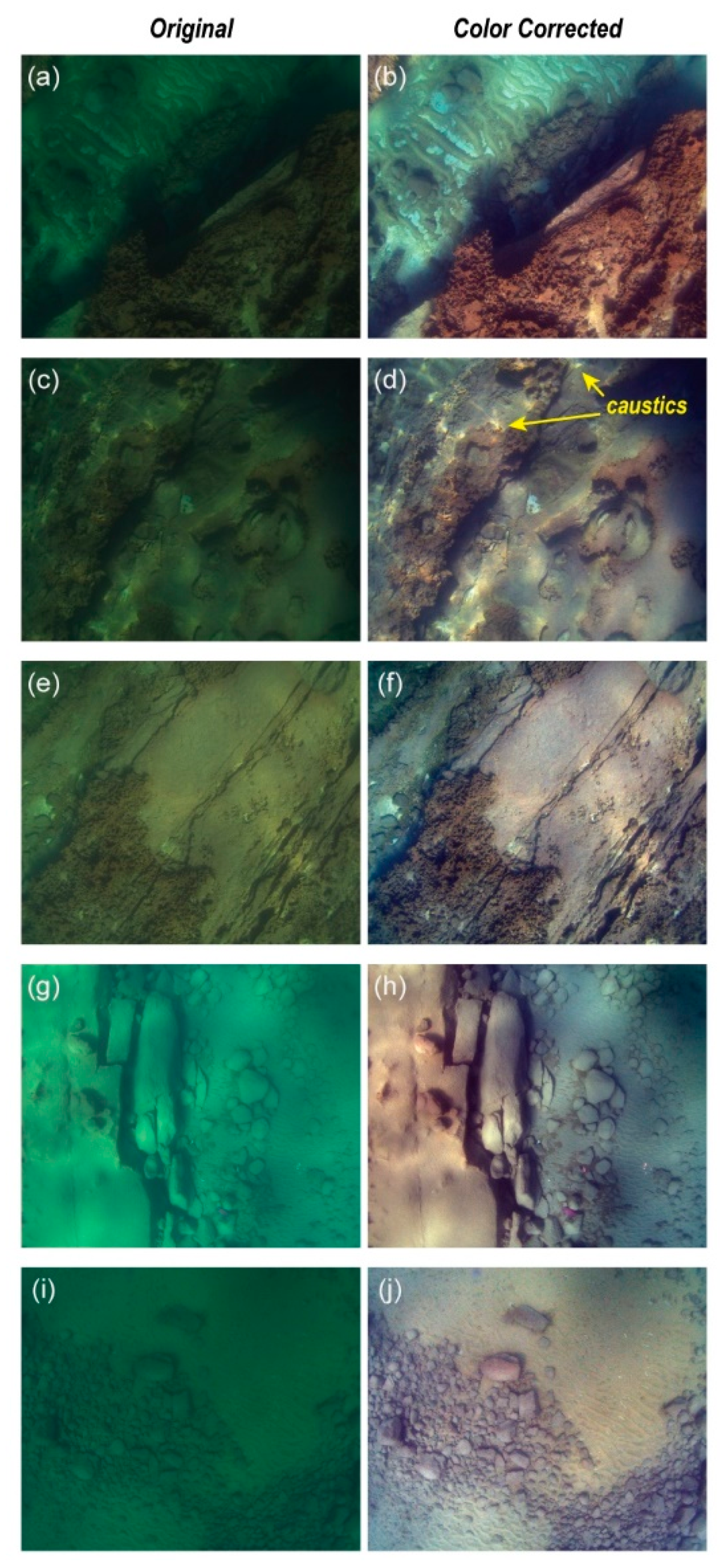
Because of the strong color modifications caused by light absorption and scattering in underwater imagery, a color correction process was conducted on the raw images before generating point cloud and orthoimage products (
Figure 4). The color correction technique was a twofold process. First, images were corrected for the high absorption (and low color values) in the red band using the color balancing techniques of Ancuti et al. [
20]. For this, the red channel was modified using a color compensation equation (Equation (4) of Ancuti et al. [
20]) that uses both image-wide and pixel-by-pixel comparisons of red brightness with respect to green brightness. After compensation, the images were white balanced using the “grayworld” assumption [
20], which ensures that the three-color-band histograms are centered on the mean brightness value of the image. The remaining techniques of Ancuti et al. [
20], which include sharpening and multi-product fusion, were not employed. The resulting images utilized only about a quarter to a half of the complete 0–255 dynamic range of the three-color bands. Thus, the brightness values of each band were stretched linearly over the complete range, while allowing the brightest and darkest 0.05% of the original image pixels (i.e., 2506 of the 5.013 million pixels) to be excluded from the histogram stretch. This final element was included to ensure that light or dark spots in the photos, which often occurred from water column particles or image noise, did not exert undue control on the final brightness values. Examples of the color correction output are included in
Figure 5.
Metashape was then used to generate a 3D point cloud using the high-resolution and moderate filtering settings [
12,
19]. This resulted in a total of 3.63 billion points for the 77,400 m
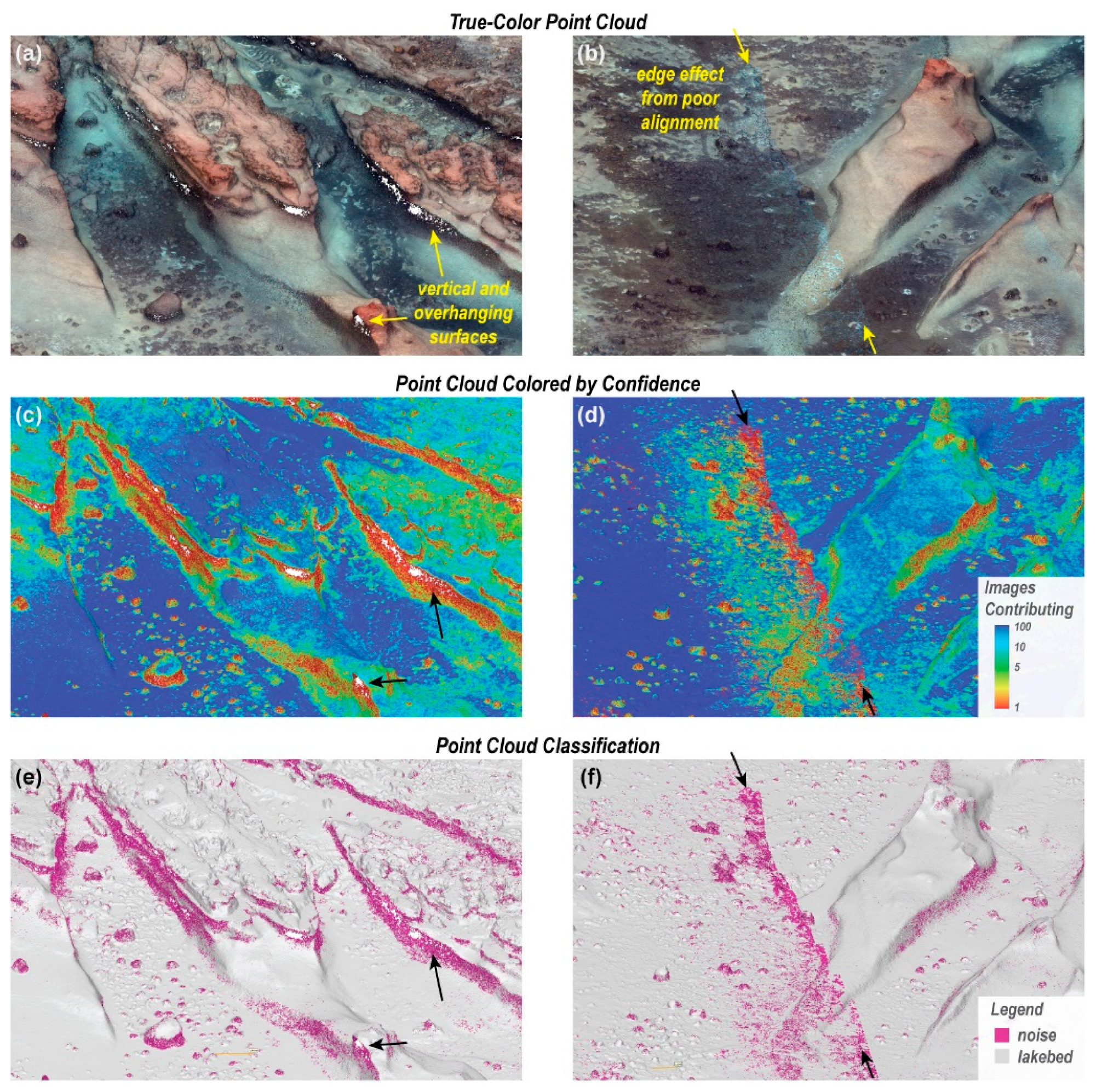
2 study area, and each point included a RGB color value derived from the color-corrected photos and a confidence estimate, which was equivalent to the number of photos that were included to generate each point. Examples of the RGB colors and confidence values of small sections of the point clouds are shown in
Figure 6. Low point confidence was found in two general areas: (i) near vertical and overhanging rock faces, where few images were able to resolve the feature (
Figure 6, lefthand column), and (ii) areas where poor alignment made short (several meters in length) linear offsets at the outermost edge of image projections (
Figure 6, righthand column). The occurrence of (i) was persistent through the study area, whereas less than a dozen examples of (ii) could be found. Both areas of low confidence were represented by noisy output in the point clouds that did not mimic lakebed morphology (
Figure 6). Thus, we classified the point clouds based on confidence values, and defined “noise” points to be products of only one image and “lakebed” points to be products of two or more images (
Figure 6e,f). This resulted in about 425 million, or ~11.7% of the points, classified as noise. The resulting lakebed point cloud had an average point cloud density of 4.1 points/cm
2.
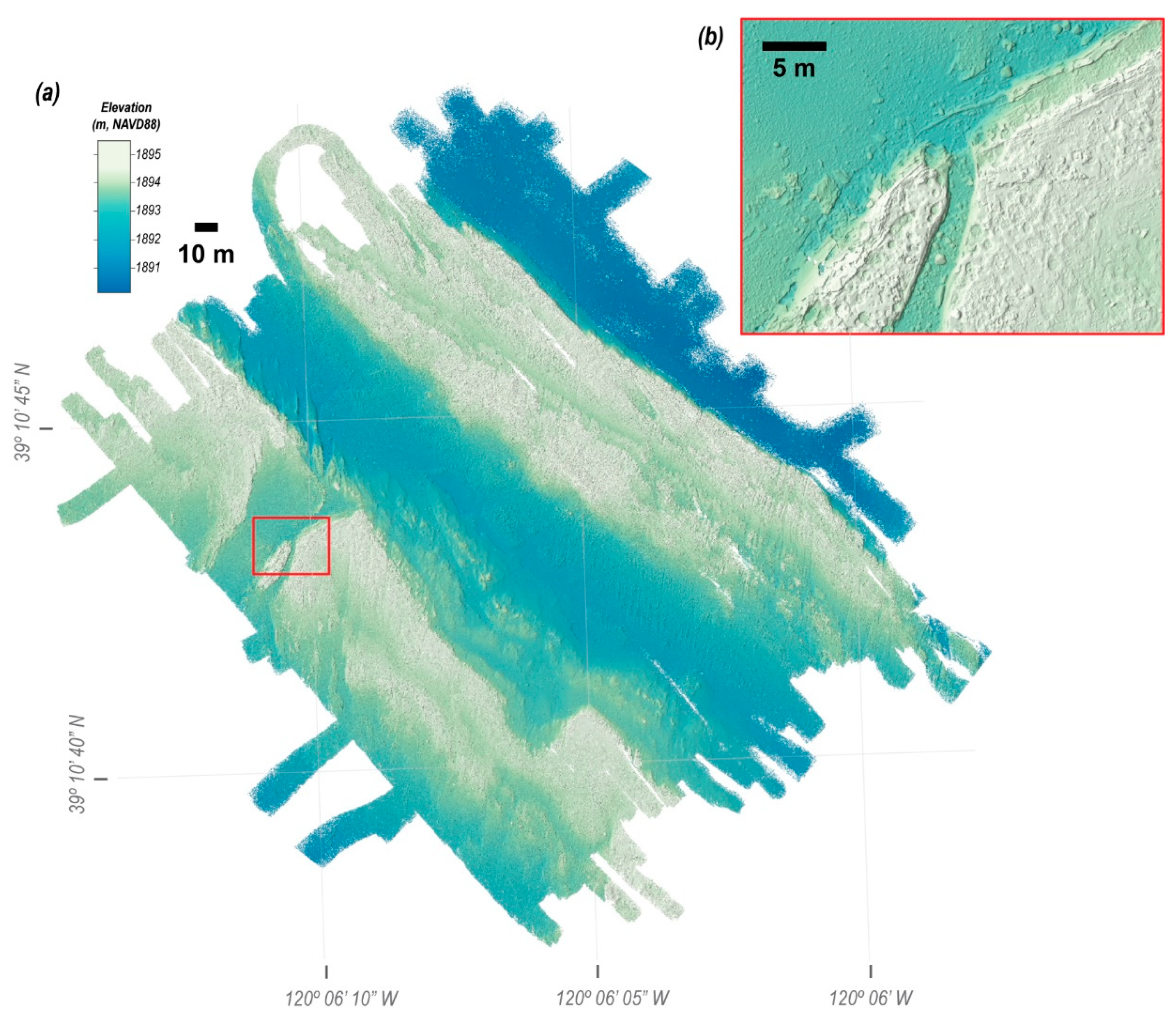
The lakebed point cloud was used to generate digital surface models (DSMs) of the study area, using Metashape with interpolation disabled [
19]. Using the high-resolution lakebed point clouds, Metashape generated a DSM with 5.3 mm × 5.3 mm pixel resolution. This DSM was output at 25 mm × 25 mm pixel resolution to produce a manageable file size (311 MB compressed), although different resolution DSMs can be made with the raw point cloud data.
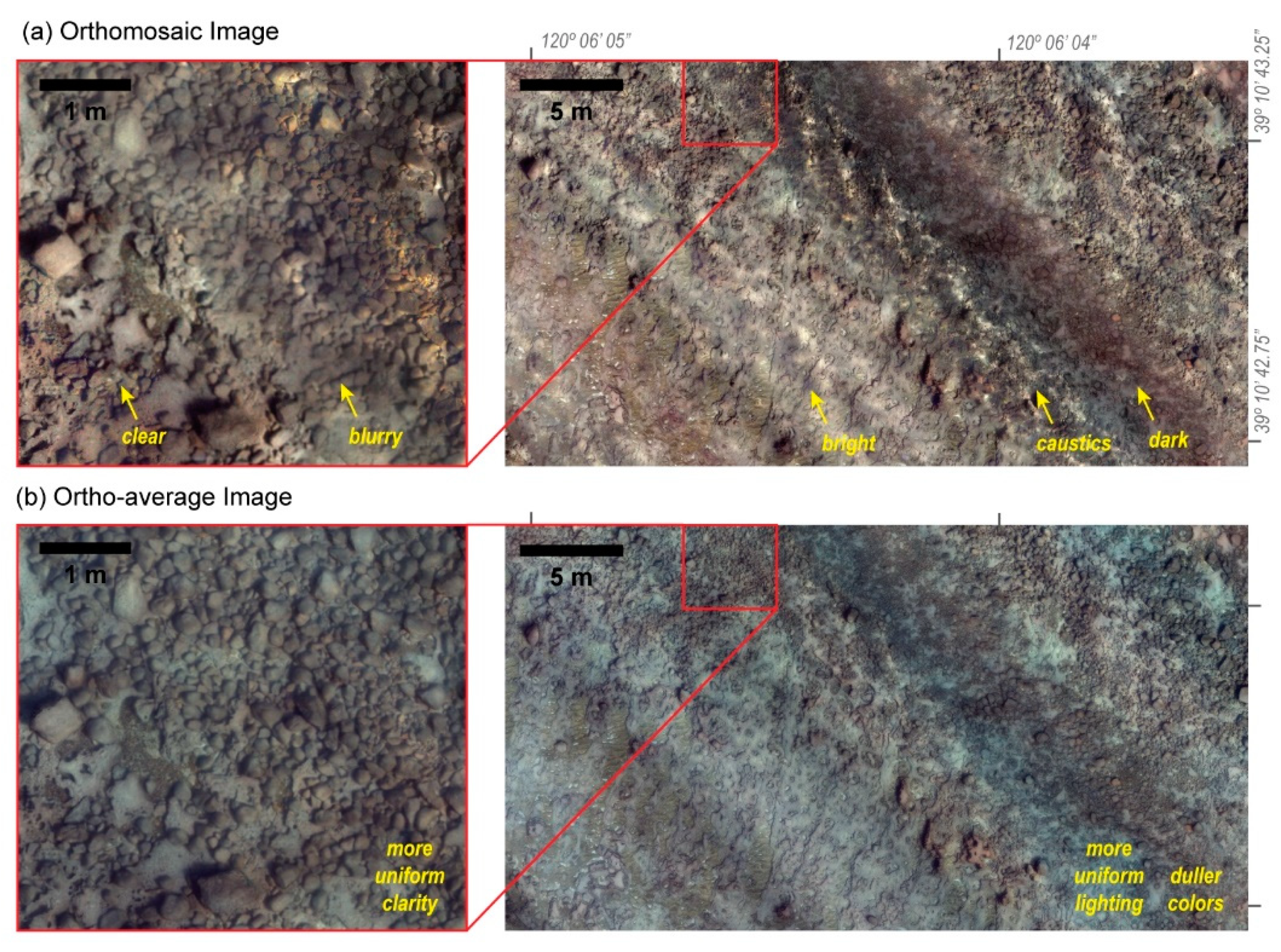
Orthoimages were then made with Metashape, using the color-corrected imagery projected onto the DSM (
Figure 4). Two orthoimage creation techniques were used and are compared below: “orthomosaic” and “ortho-average”. The orthomosaic technique blends low-frequency components of overlapping images using a weighted-average algorithm and uses the high-frequency component from the single image most normal to the viewpoint. These imagery data are projected over polygonal areas of the study that are separated by automatically generated seamlines. We did not employ any seam refinement in the orthomosaic technique. The ortho-average technique computes an RGB color for each pixel of the orthoimage from the average RGB color of all photos contributing to it. For both methods, we did not use hole filling options over the gaps in the DSM. The resulting orthoimages were generated at a 2.6 mm × 2.6 mm pixel resolution, and we output these products at a 5 mm × 5 mm pixel resolution to produce manageable file sizes.
The resulting 3D point clouds, DSM, and orthoimagery products are published and available in a USGS Data Release publication [
21], and digital mapping products of these data are provided in a USGS Scientific Investigations Map [
22]. Lake elevations are reported with respect to the North American Vertical Datum of 1988 (NAVD88), rather than water depths, which fluctuate by several meters over annual and interannual scales. For conversion purposes, however, the Lake Tahoe water level during our field operations averaged 1898.44 m NAVD88, as measured by the USGS station 10337000, which is named Lake Tahoe at Tahoe City (data available from U.S. Geological Survey, 2022 [
23]).
2.6. Additional Tests
In addition to the general data processing described above, we also conducted several tests to evaluate the data quality of the products and the effects of data collection and data processing methods. First, we utilized the machined aluminum and painted “Picasso Plate”, described fully in Hatcher et al. [
12], to provide assessments of horizontal and vertical distance measurements on the order of decimeters in the SfM products. The Picasso Plate has four targets, three of which are on corners of the plate and one in the center on a 10 cm high platform, and the relative positions of which were machined to sub-millimeter accuracies [
12]. This plate was placed twice in the study area, once on each survey date, so that it would be fully imaged in at least two survey transects. After SfM alignment, digital markers were placed on the locations of the four machined target locations, and distances between the corner markers and the height of the center marker were calculated from the positions derived from the SfM data. Comparisons between actual distances and SfM-derived distances were tabulated for assessments of local-scale distance measurement accuracies in the SfM products.
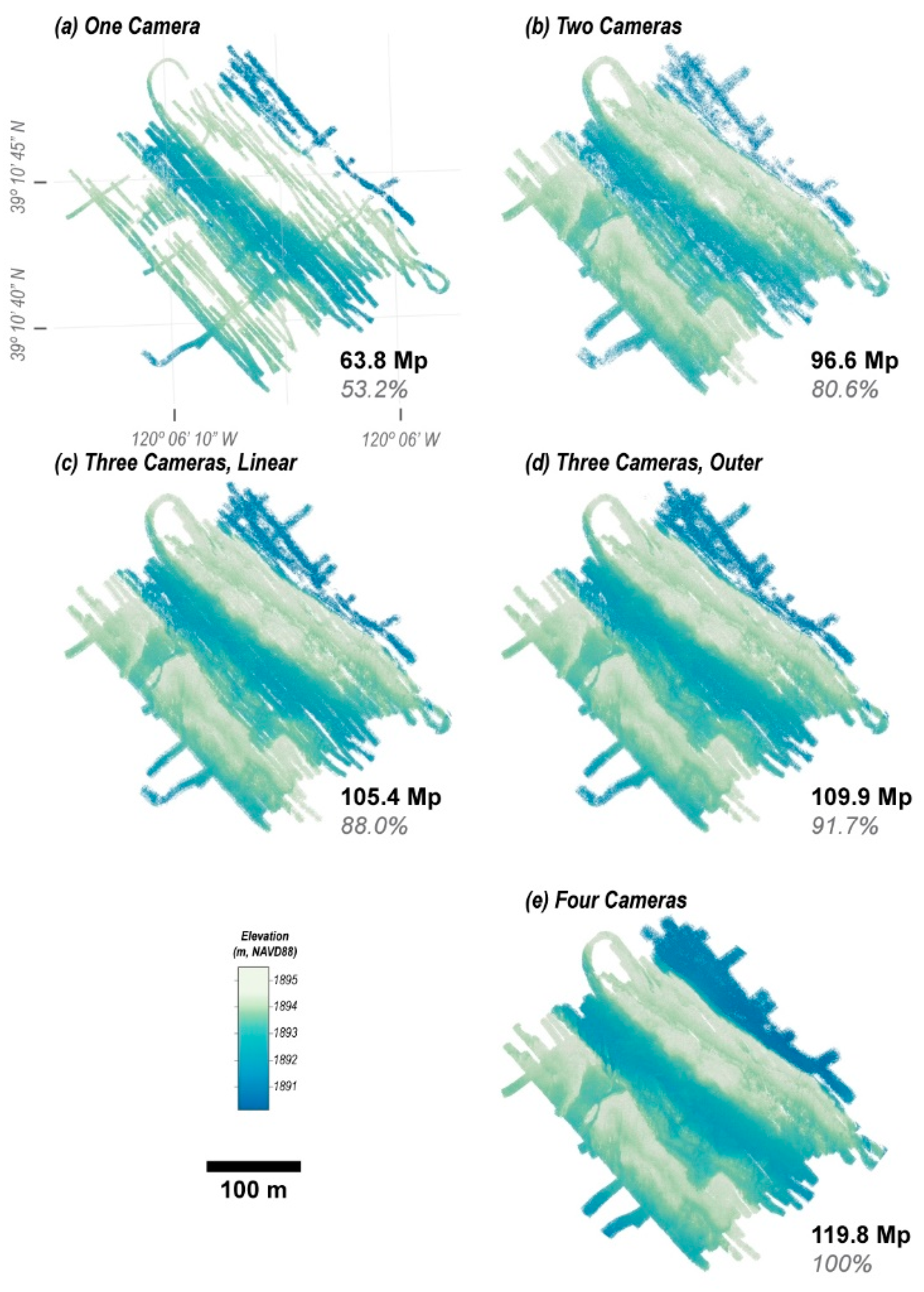
We also ran tests to evaluate the utility of multi-camera setups by rerunning the complete SfM data processing workflows with only one, two, and three cameras. For these SfM analyses, we used the middle camera for the one-camera processing, the side-looking cameras for the two-camera processing, and two different setups for three cameras: a “linear” compilation of the two side-looking cameras and the middle camera and an “outer” compilation of the two side-looking cameras and the forward-looking camera. To compare these outputs, we evaluated the total coverage as computed by the number of 25 mm × 25 mm DSM pixels produced by each setup and evaluated vertical differences between the DSMs.
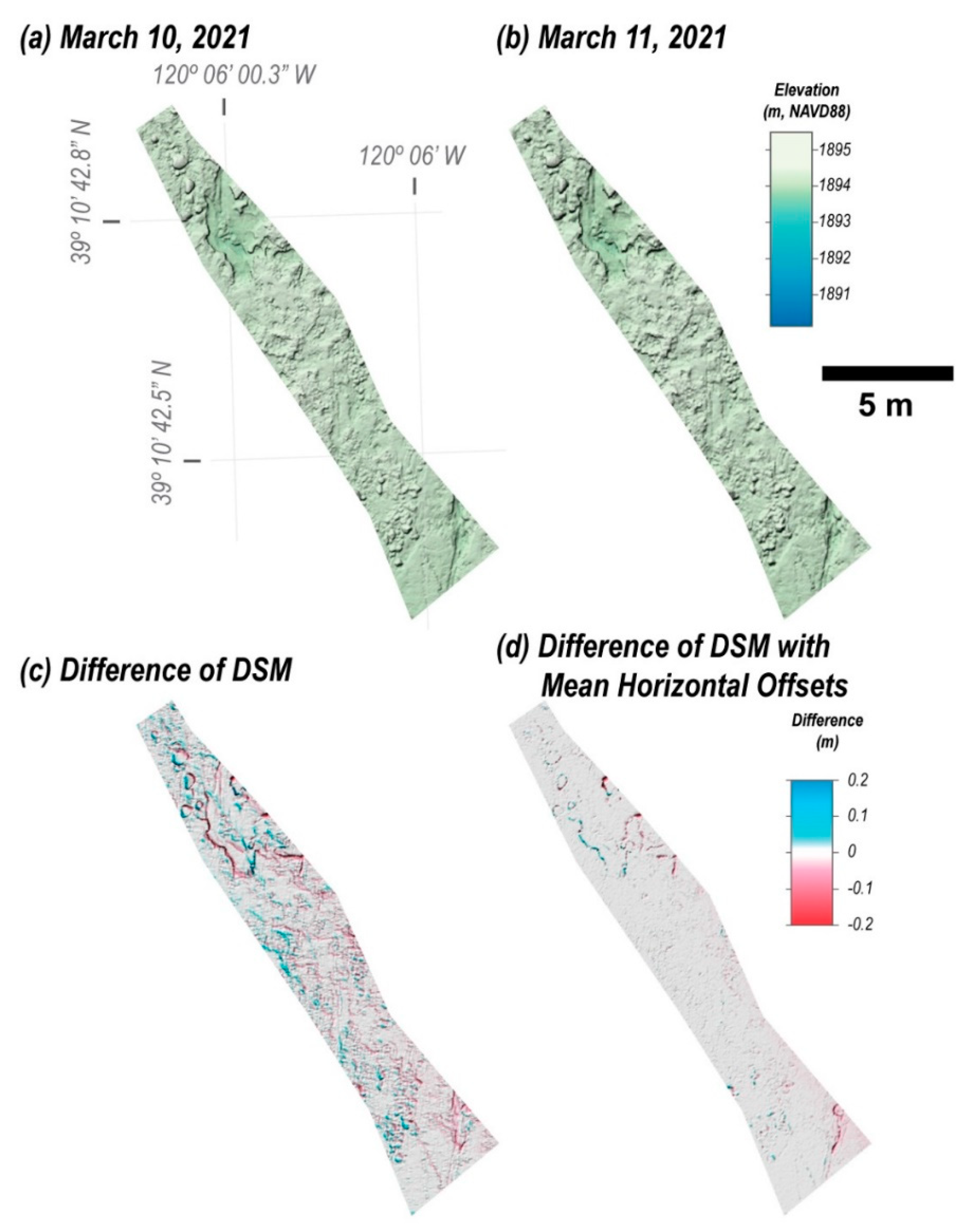
Lastly, we examined the repeatability of the SfM results by comparing an area of survey overlap captured during both the first and second days of operations. This area of overlap was relatively small (273 m2, or ~0.35% of the surveyed study area) because it was not a survey goal to include overlap. To make this comparison, the SfM workflow was conducted independently on the complete set of data from the two survey days. Then, DSM data were clipped out of each resulting product for only the area of overlap where both survey days had both continuous data and survey lines bounding each side of the overlap area. Differences between these independent SfM outputs were assessed by computing differences of the DSMs to evaluate vertical offsets, and by marking 8 recognizable features on flat portions of the lakebed, such as bedding or other coloration, to compute horizontal and vertical position differences for each point.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}