
A Novel Method of Ionospheric Inversion Based on Horizontal Constraint and Empirical Orthogonal Function

Abstract
:1. Introduction
2. Materials and Methods
2.1. Basic Principle of CIT
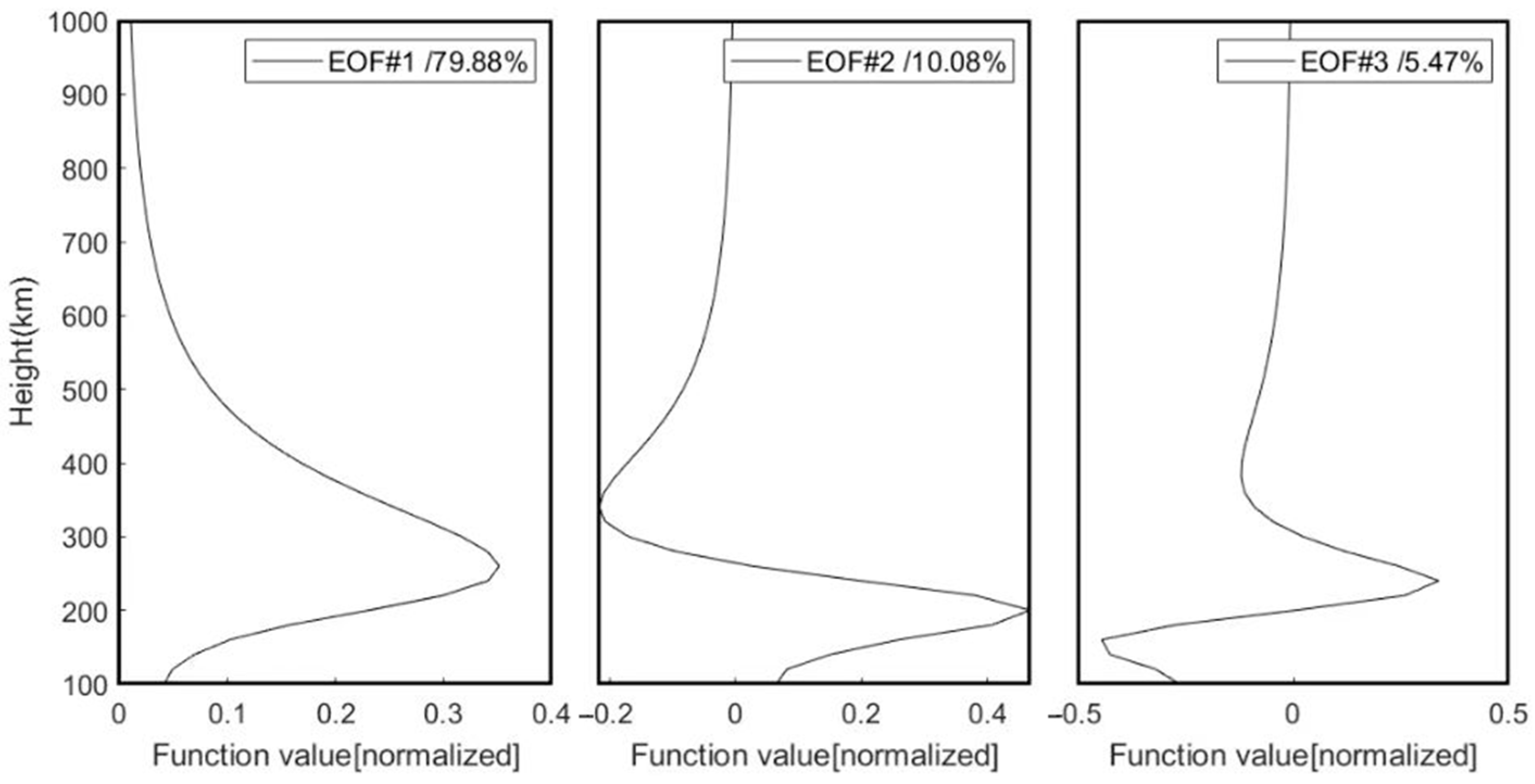
2.2. Theory of ARTHCEOF
3. Results
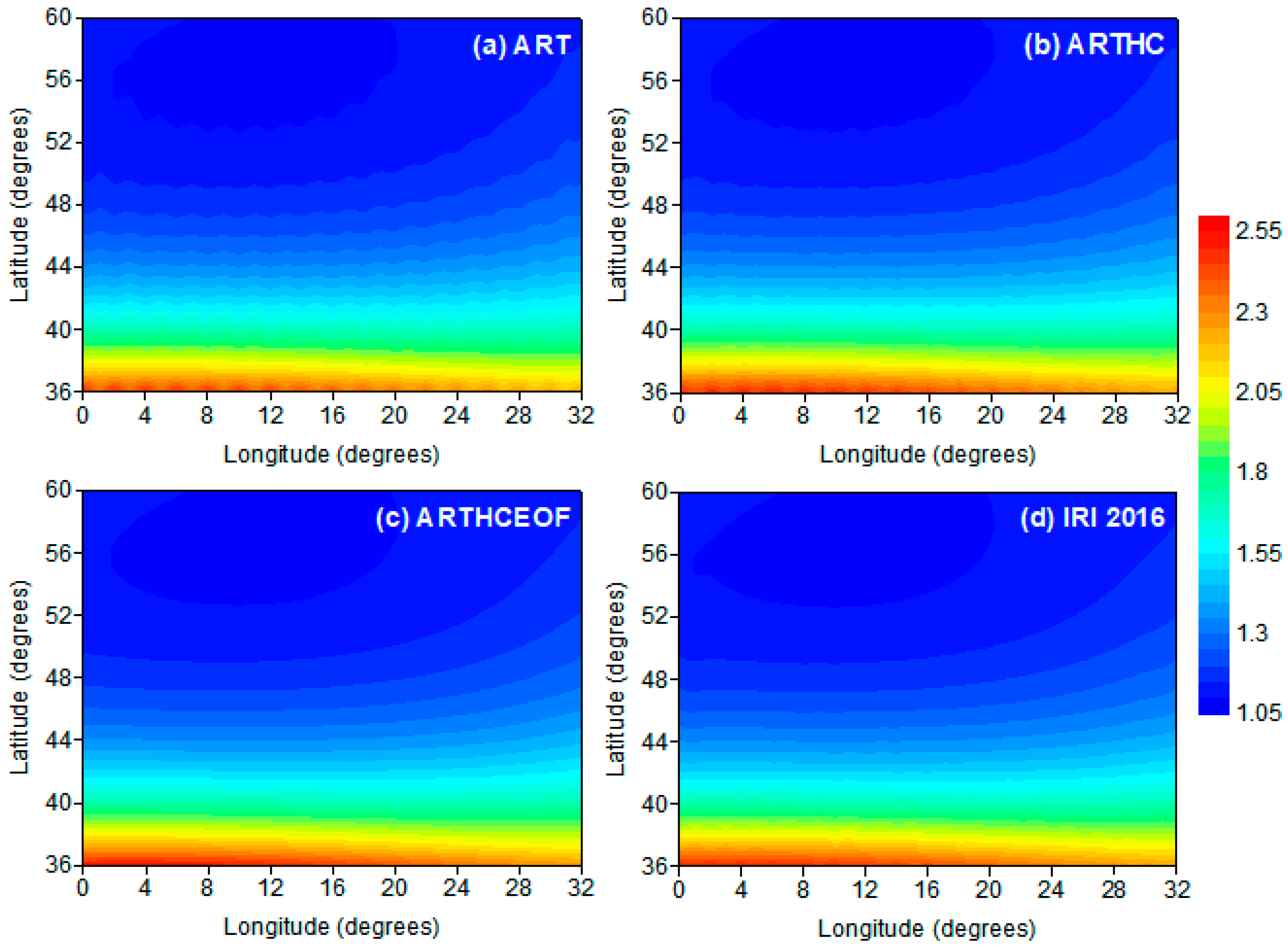
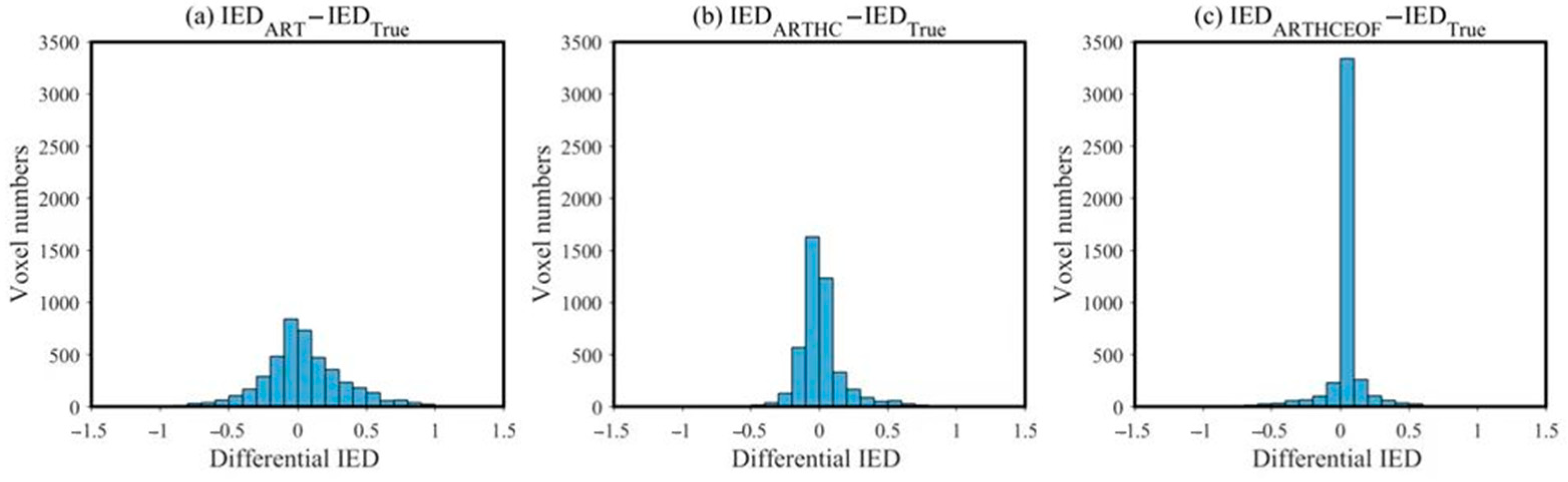
3.1. Simulated Test of the New CIT Algorithm
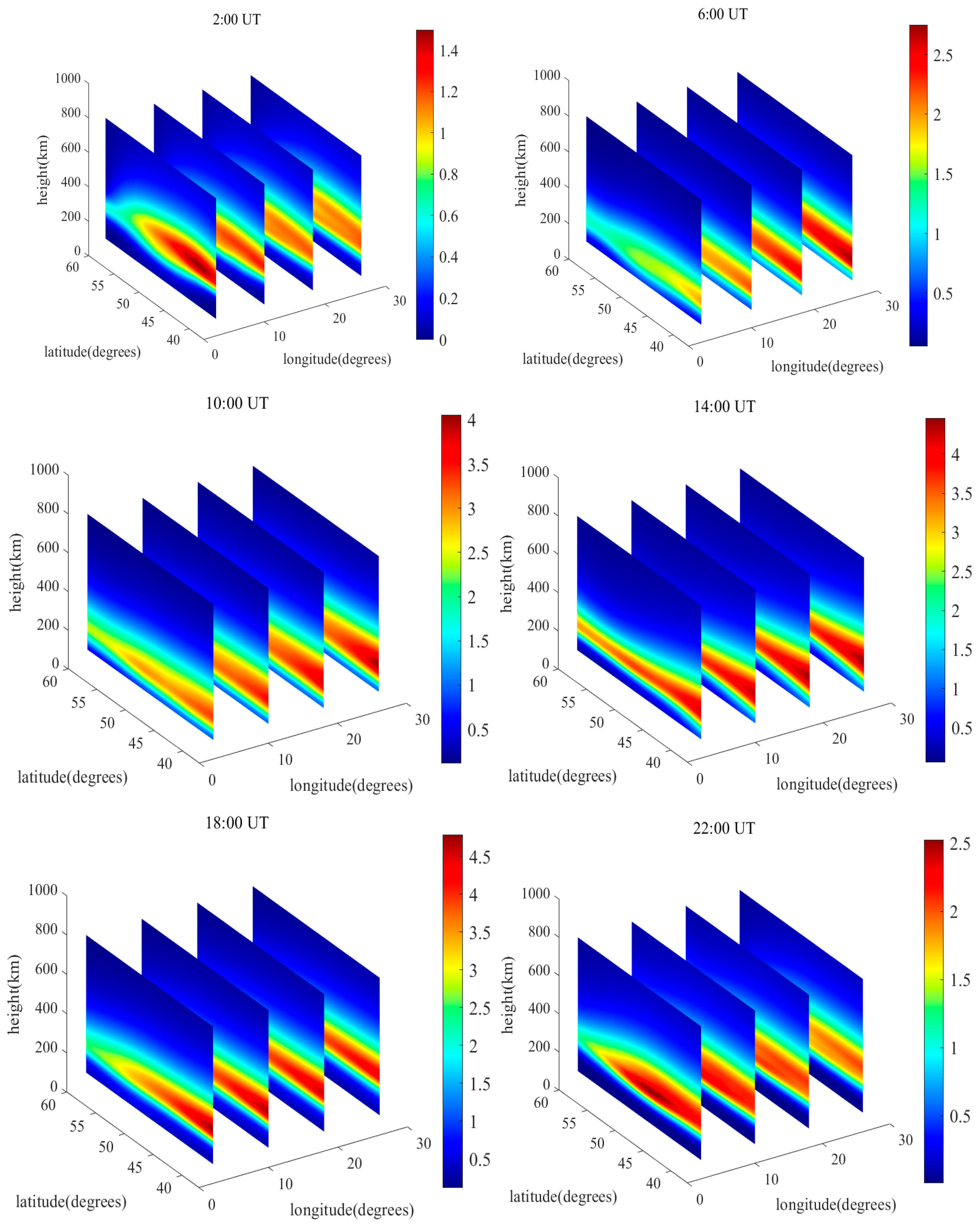
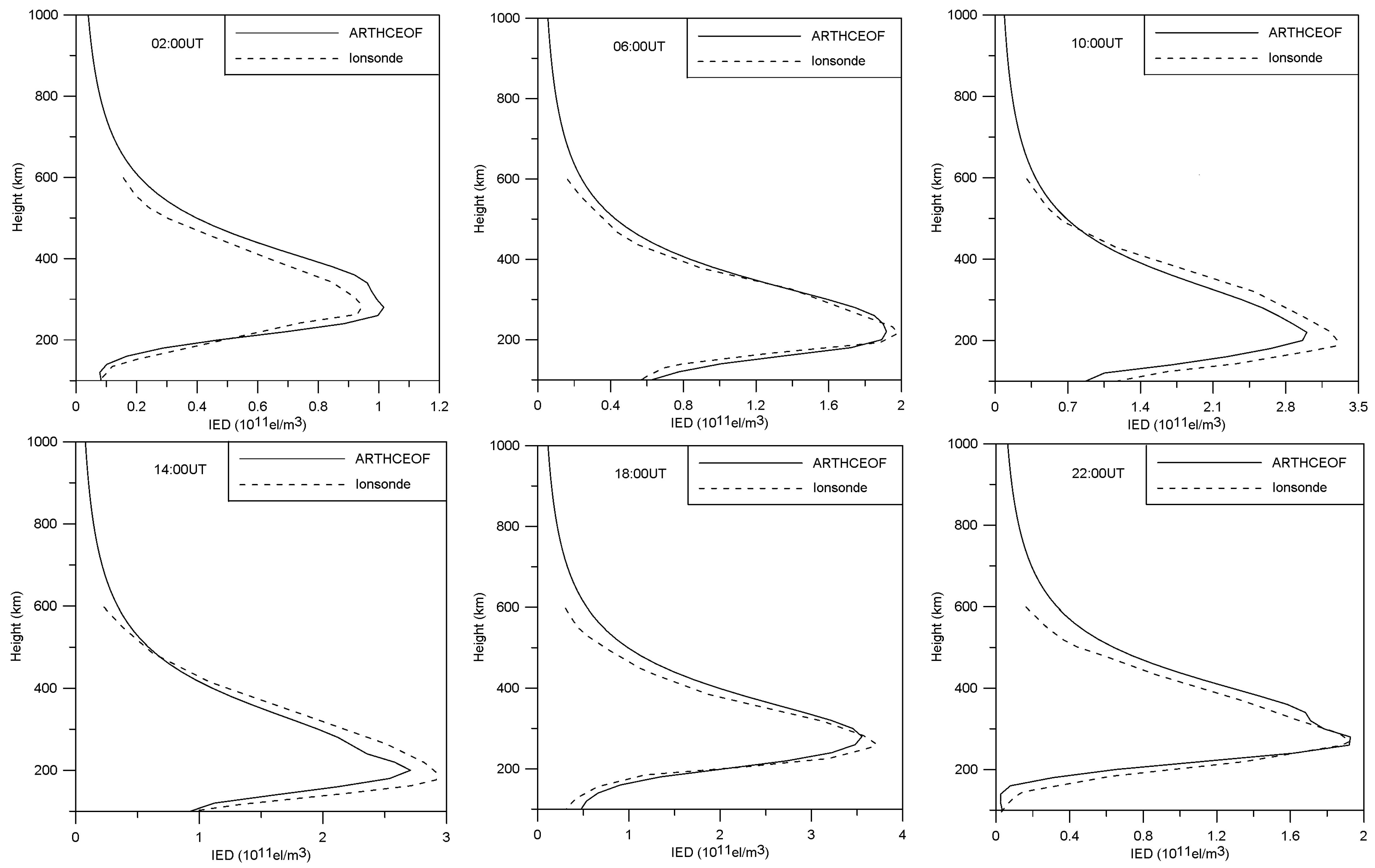
3.2. IED Reconstruction during Geomagnetic Quiet Day
3.3. IED Reconstruction during Geomagnetic Storm Day
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Su, K.; Jin, S.; Hoque, M.M. Evaluation of Ionospheric Delay Effects on Multi-GNSS Positioning Performance. Remote Sens. 2019, 11, 171. [Google Scholar] [CrossRef] [Green Version]
- Wen, D.B.; Xie, K.Y.; Tang, Y.H.; Mei, D.K.; Chen, X.; Chen, H.Q. A New Algorithm for Ill-posed Problem of GNSS-based Ionospheric Tomography. Remote Sens. 2023, 15, 1930. [Google Scholar] [CrossRef]
- Chen, C.H.; Saito, A.; Lin, C.H.; Yamamoto, M.; Suzuki, S.; Seemala, G.K. Medium-scale traveling ionospheric disturbances by three-dimensional ionospheric GPS tomography. Earth Planets Space 2016, 68, 32. [Google Scholar] [CrossRef] [Green Version]
- Kong, J.; Li, F.; Yao, Y.; Wang, Z.; Peng, W.; Zhang, Q. Reconstruction of 2D/3D ionospheric disturbances in high-latitude and Arctic regions during a geomagnetic storm using GNSS carrier TEC: A case study of the 2015 great storm. J. Geod. 2019, 93, 1529–1541. [Google Scholar] [CrossRef]
- Banville, S.; Collins, P.; Zhang, W.; Langley, R.B. Global and Regional Ionospheric Corrections for Faster PPP Convergence. Navigation 2014, 61, 115–124. [Google Scholar] [CrossRef]
- Belehaki, A.; Tsagouri, I.; Altadill, D.; Blanch, E.; Borries, C.; Buresova, D.; Chum, J.; Galkin, I.; Juan, J.M.; Segarra, A.; et al. An overview of methodologies for real-time detection, characterisation and tracking of traveling ionospheric disturbances developed in the TechTIDE project. J. Space Weather Spac. 2020, 10, 42. [Google Scholar] [CrossRef]
- Ciraolo, L.; Azpilicueta, F.; Brunini, C.; Meza, A.; Radicella, S.M. Calibration errors on experimental slant total electron content (TEC) determined with GPS. J. Geod. 2007, 81, 111–120. [Google Scholar] [CrossRef]
- Austen, J.R.; Franke, S.J.; Liu, C.H. Ionospheric imagingusing computerized tomography. Radio Sci. 1988, 23, 299–307. [Google Scholar] [CrossRef]
- Raymund, T.D.; Austen, J.R.; Franke, S.J.; Liu, C.H.; Klobuchar, J.A.; Stalker, J. Application of computerized tomography to the investigation of ionospheric structures. Radio Sci. 1990, 25, 771–789. [Google Scholar] [CrossRef]
- Fremouw, E.J.; Secan, J.A.; Howe, B.M. Application of stochastic theory to ionospheric tomogrpahy. Radio Sci. 1992, 27, 721–732. [Google Scholar] [CrossRef]
- Pryse, S.E.; Kersley, L.; Rice, D.L.; Russell, C.D.; Walker, I.K. Tomographic imaging of the ionospheric mid-latitude trough. Ann. Geophys. 1993, 11, 144–149. [Google Scholar]
- Kunitsyn, V.E.; Andreeva, E.S.; Razinkov, O.G. Possibilities of the near-space environment radio tomography. Radio Sci. 1997, 32, 1953–1963. [Google Scholar] [CrossRef]
- Giulio, R.; Alejandro, F.; Antonio, R. GPS tomography of the ionospheric electron content with a correlation functional. IEEE Trans. Geosci. Remote Sens. 1998, 36, 143–153. [Google Scholar]
- Fridman, S.V.; Nickisch, L.J. Generalization of ionospheric tomography on diverse data sources: Reconstruction of the three-dimensional ionosphere from simultaneous vertical ionograms, backscatter ionograms, and total electron content data. Radio Sci. 2001, 36, 1129–1139. [Google Scholar] [CrossRef]
- Ma, X.F. Three-dimensional ionospheric tomography using observation data of GPS ground receivers and ionosonde by neural network. J. Geophys. Res. 2005, 110, A05308. [Google Scholar] [CrossRef]
- Vierinen, J.; Norberg, J.; Lehtinen, M.S.; Amm, O.; Roininen, L.; Väänänen, A.; Erickson, P.J.; McKay-Bukowski, D. Beacon satellite receiver for ionospheric tomography. Radio Sci. 2014, 49, 1141–1152. [Google Scholar] [CrossRef]
- Wen, D.; Tang, Y.; Chen, X.; Zou, Y. A Double-Adaptive Adjustment Algorithm for Ionospheric Tomography. Remote Sens. 2023, 15, 2307. [Google Scholar] [CrossRef]
- Zheng, D.; Zheng, H.; Wang, Y.; Nie, W.; Li, C.; Ao, M.; Hu, W.; Zhou, W. Variable pixel size ionospheric tomography. Adv. Space Res. 2017, 59, 2969–2986. [Google Scholar] [CrossRef]
- Saito, S.; Suzuki, S.; Yamamoto, M.; Saito, A.; Chen, C.H. Real-time ionosphere monitoring by three-dimensional tomography over Japan. Navig. J. Inst. Navig. 2017, 64, 504. [Google Scholar] [CrossRef] [Green Version]
- Bhuyan, K.; Singh, S.B.; Bhuyan, P.K. Tomographic reconstruction of the ionosphere using generalized singular value decomposition. Curr. Sci. 2002, 83, 1117–1120. [Google Scholar]
- Yao, Y.; Tang, J.; Kong, J.; Zhang, L.; Zhang, S. Application of hybrid regularization method for tomographic reconstruction of midlatitude ionospheric electron density. Adv. Space Res. 2013, 52, 2215–2225. [Google Scholar] [CrossRef]
- Seemala, G.K.; Yamamoto, M.; Saito, A.; Chen, C.H. Three-dimensional GPS ionospheric tomography over Japan using constrained least squares. J. Geophys. Res. 2014, 119, 3044–3052. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.S.; Yang, L.; Zhou, Y.L.; Ming, D. A AMART Algorithm Applied to Ionospheric Electron Reconstruction. Acta Geod. Cartogr. Sin. 2018, 47, 57–63. [Google Scholar]
- Gerzen, T.; Minkwitz, D. Simultaneous multiplicative column-normalized method (SMART) for 3-D ionosphere tomography in comparison to other algebraic methods. Ann. Geophys. 2016, 34, 97–115. [Google Scholar] [CrossRef] [Green Version]
- Razin, M.R.G.; Voosoghi, B. Regional application of multi-layer artifificial neural networks in 3-D ionosphere tomography. Adv. Space Res. 2016, 58, 339–348. [Google Scholar] [CrossRef]
- Jin, S.; Li, D. 3-D ionospheric tomography from dense GNSS observations based on an improved two-step iterative algorithm. Adv. Space Res. 2018, 62, 809–820. [Google Scholar] [CrossRef]
- Hobiger, T.; Kondo, T.; Koyama, Y. Constrained simultaneous algebraic reconstruction technique (C-SART)—A new and simple algorithm applied to ionospheric tomography. Earth Planets Space 2008, 60, 727–735. [Google Scholar] [CrossRef] [Green Version]
- Wen, D.B.; Liu, S.J.; Tang, P.Y. Tomographic reconstruction of ionospheric electron density based on constrained algebraic reconstruction technique. GPS Solut. 2010, 14, 375–380. [Google Scholar] [CrossRef]
- Li, H.; Yuan, Y.B.; Yan, W.; Li, Z.S. A constrained ionospheric tomography algorithm with smoothing method. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 412–415. [Google Scholar]
- Nesterov, I.A.; Kunitsyn, V.E. GNSS radio tomography of the ionosphere: The problem with essentially incomplete data. Adv. Space Res. 2011, 47, 1789–1803. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | ART | ARTHC | ARTHCEOF |
|---|---|---|---|
| Maximum absolute IEDD | 1.48 | 1.28 | 0.56 |
| MAE | 0.23 | 0.11 | 0.06 |
| RMSE | 0.33 | 0.18 | 0.14 |
| Iterative round numbers | 23 | 16 | 10 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wen, D.; Tang, Y.; Xie, K. A Novel Method of Ionospheric Inversion Based on Horizontal Constraint and Empirical Orthogonal Function. Remote Sens. 2023, 15, 3124. https://doi.org/10.3390/rs15123124
Wen D, Tang Y, Xie K. A Novel Method of Ionospheric Inversion Based on Horizontal Constraint and Empirical Orthogonal Function. Remote Sensing. 2023; 15(12):3124. https://doi.org/10.3390/rs15123124
Chicago/Turabian StyleWen, Debao, Yinghao Tang, and Kangyou Xie. 2023. "A Novel Method of Ionospheric Inversion Based on Horizontal Constraint and Empirical Orthogonal Function" Remote Sensing 15, no. 12: 3124. https://doi.org/10.3390/rs15123124