
Design and Testing of an Adaptive In-phase Magnetometer (AIMAG), the Equatorial-Electrojet-Detecting Fluxgate Magnetometer, for the CAS500-3 Satellite

 , , , , , , , , and
, , , , , , , , and
Abstract
:1. Introduction
2. Derivation of Science Requirements for AIMAG
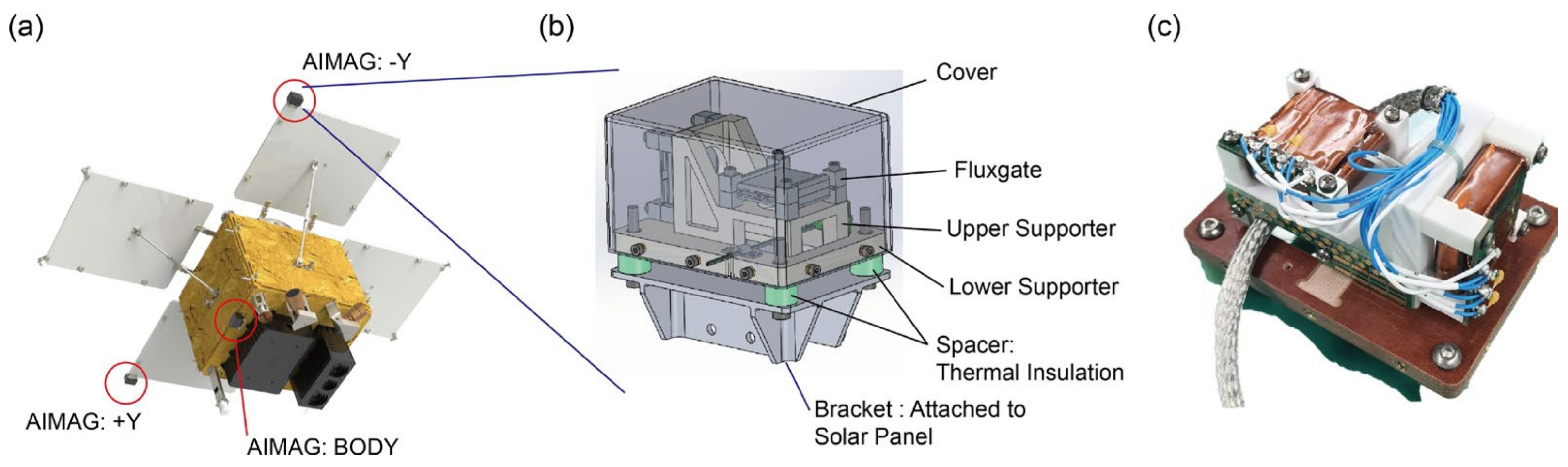
3. AIMAG Design
3.1. Specifications of AIMAG Fluxgate Magnetometers
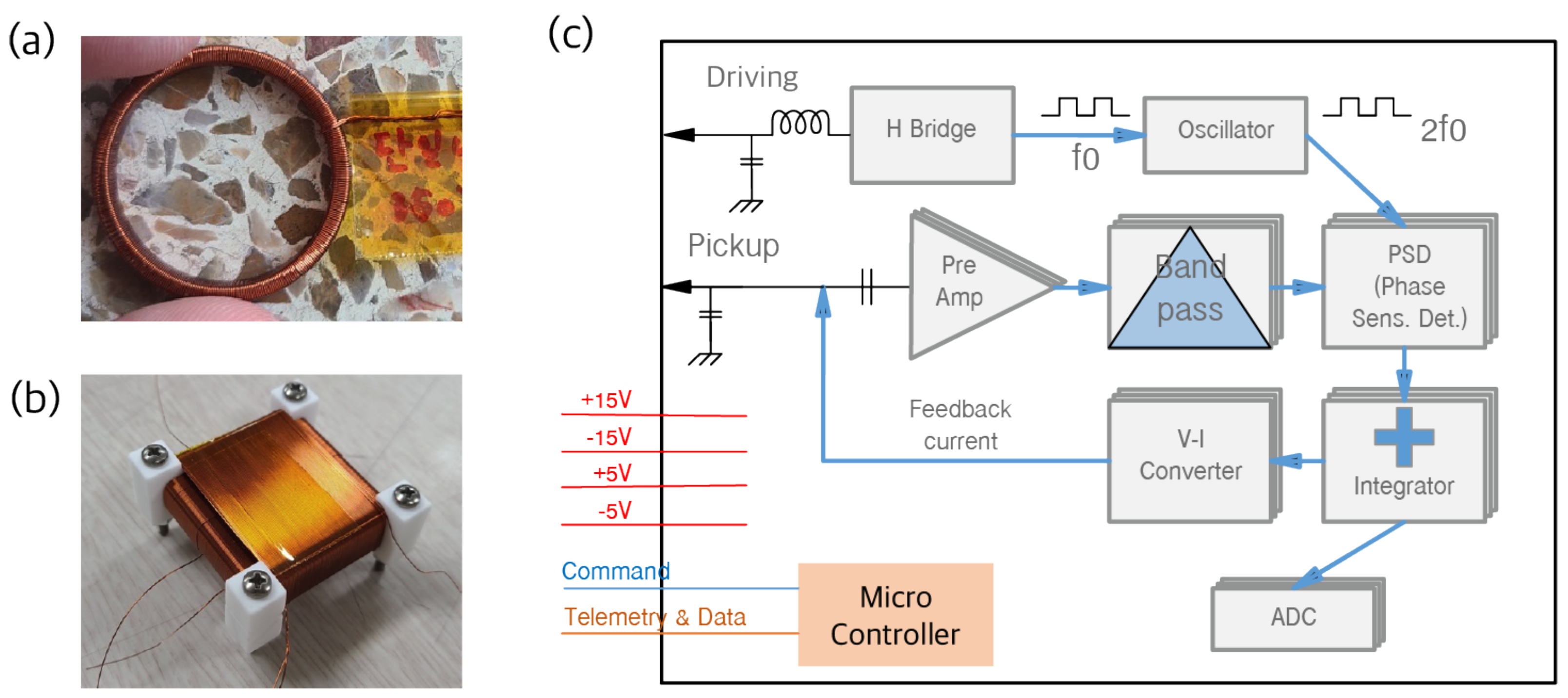
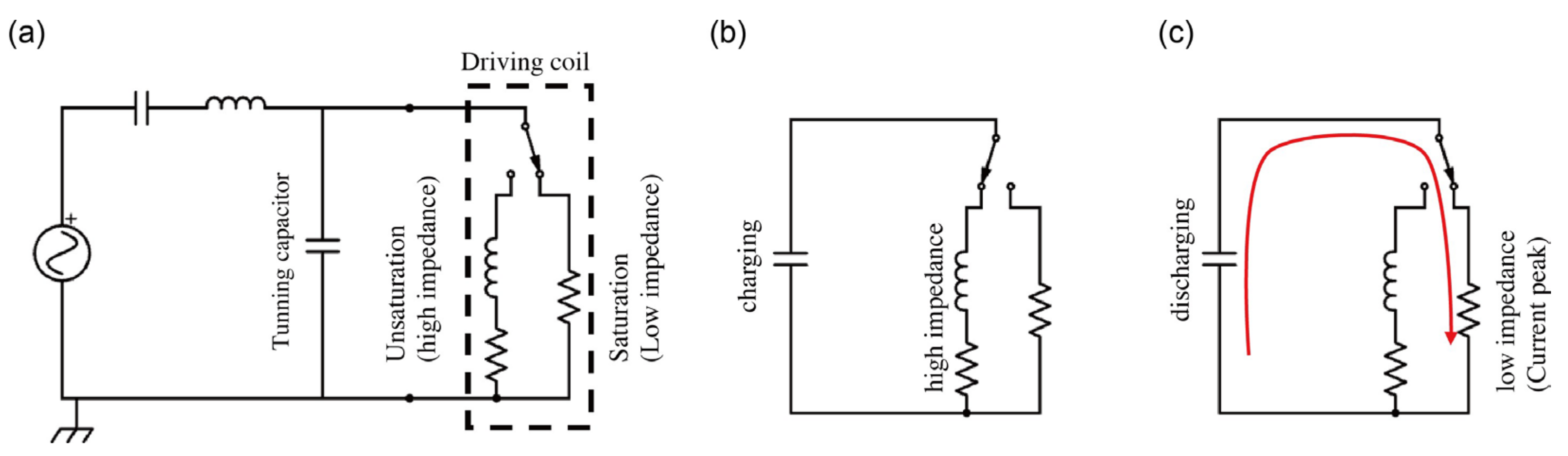
3.2. Fluxgate Electronics Design
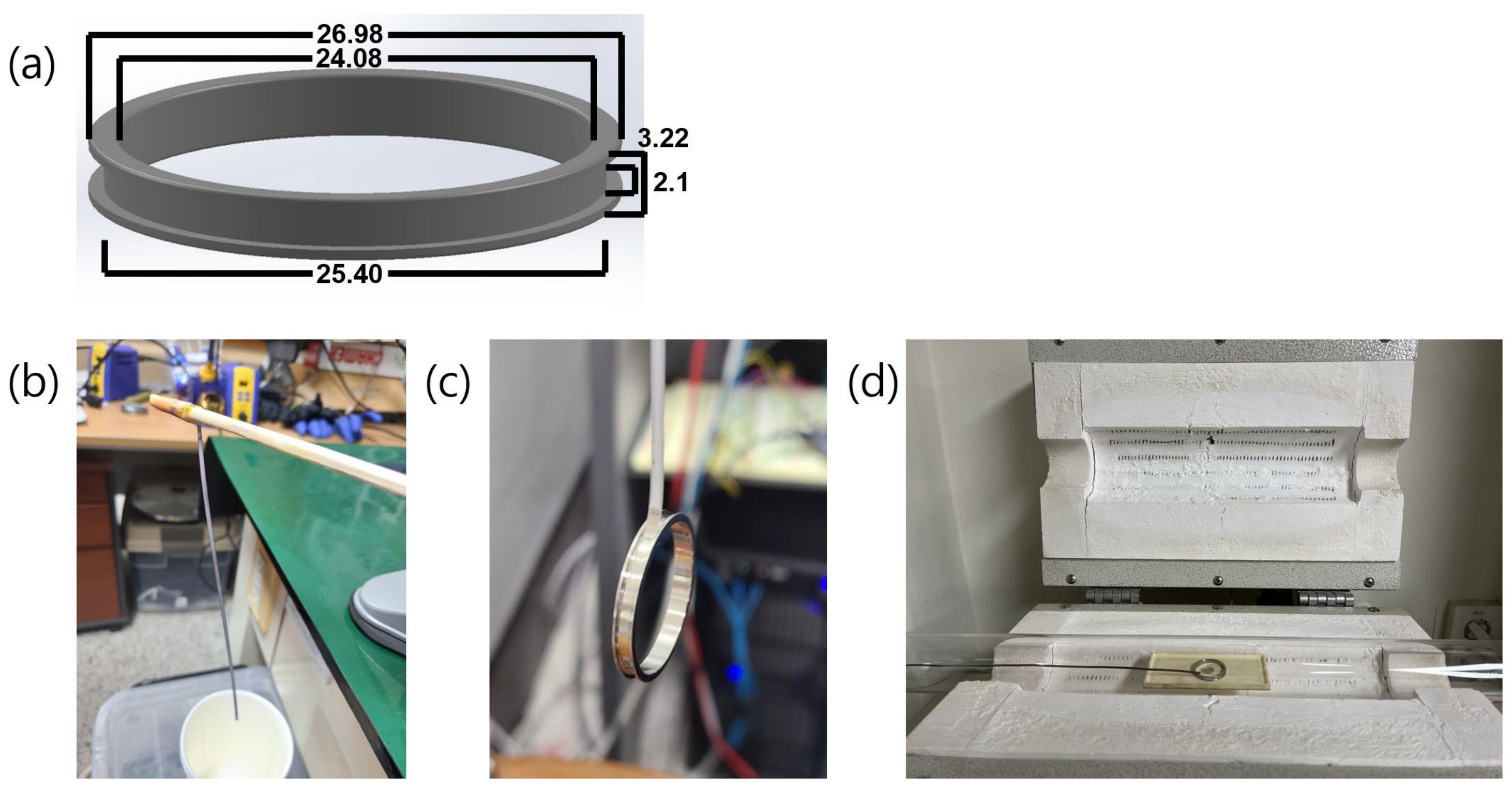
3.3. Fluxgate Sensor Core Design
4. Analysis of AIMAG Performance
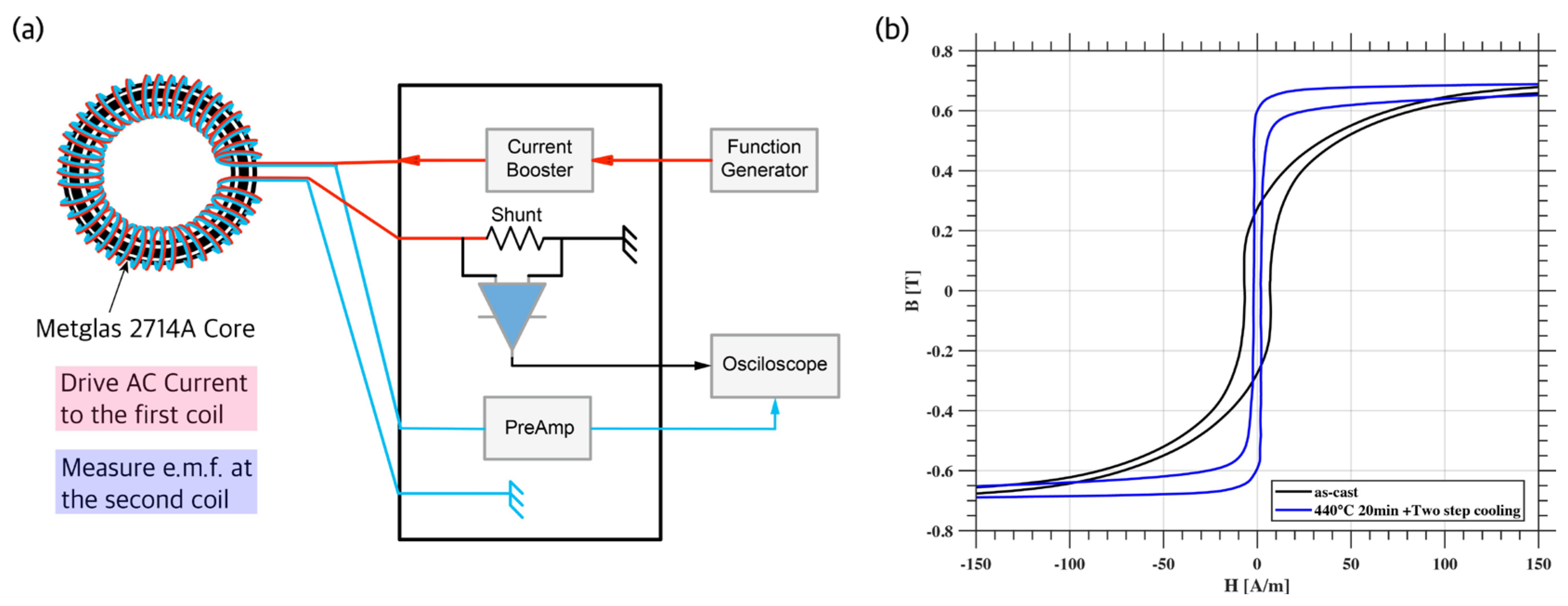
4.1. Hysteresis Characteristics
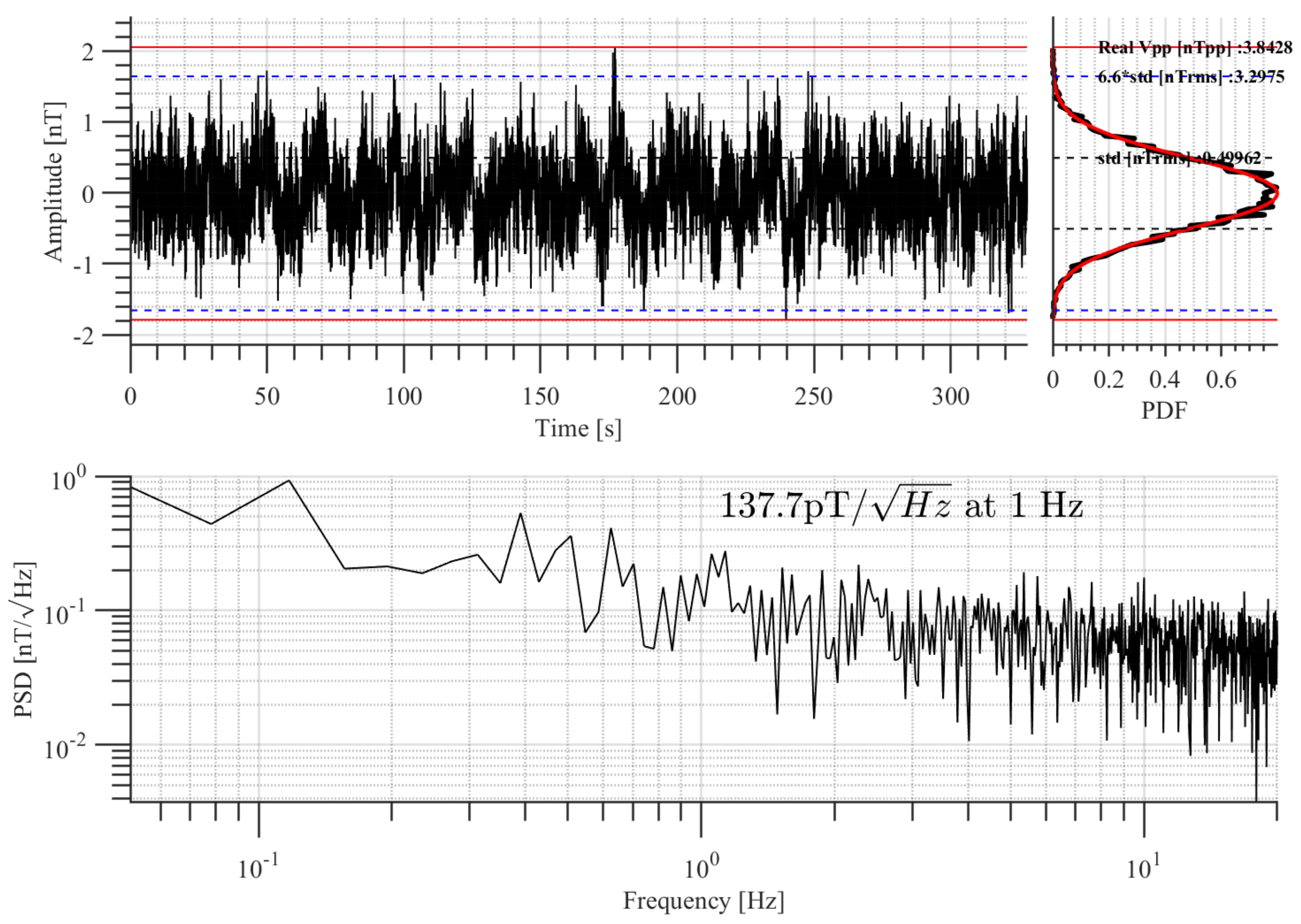
4.2. Noise Level Measurement
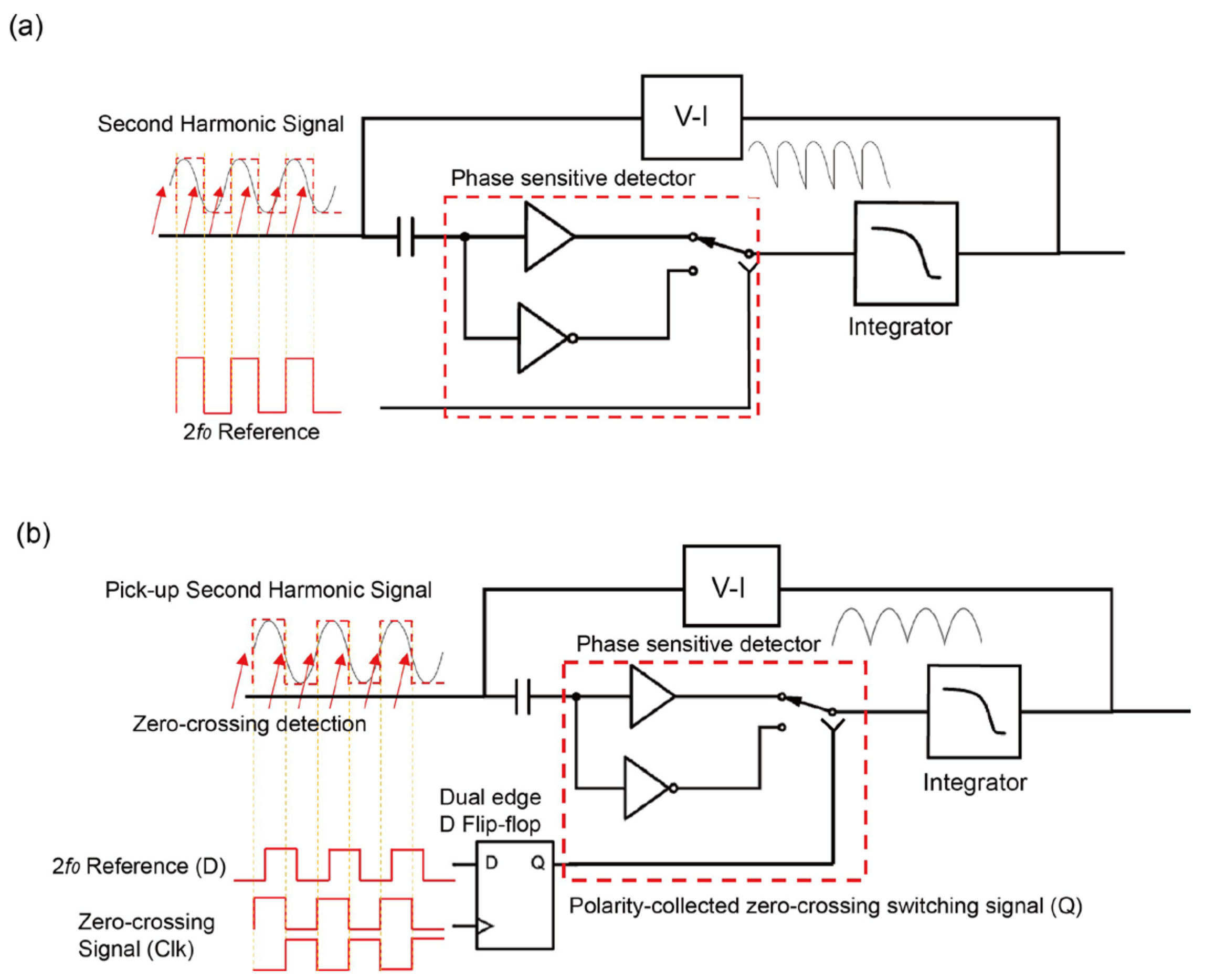
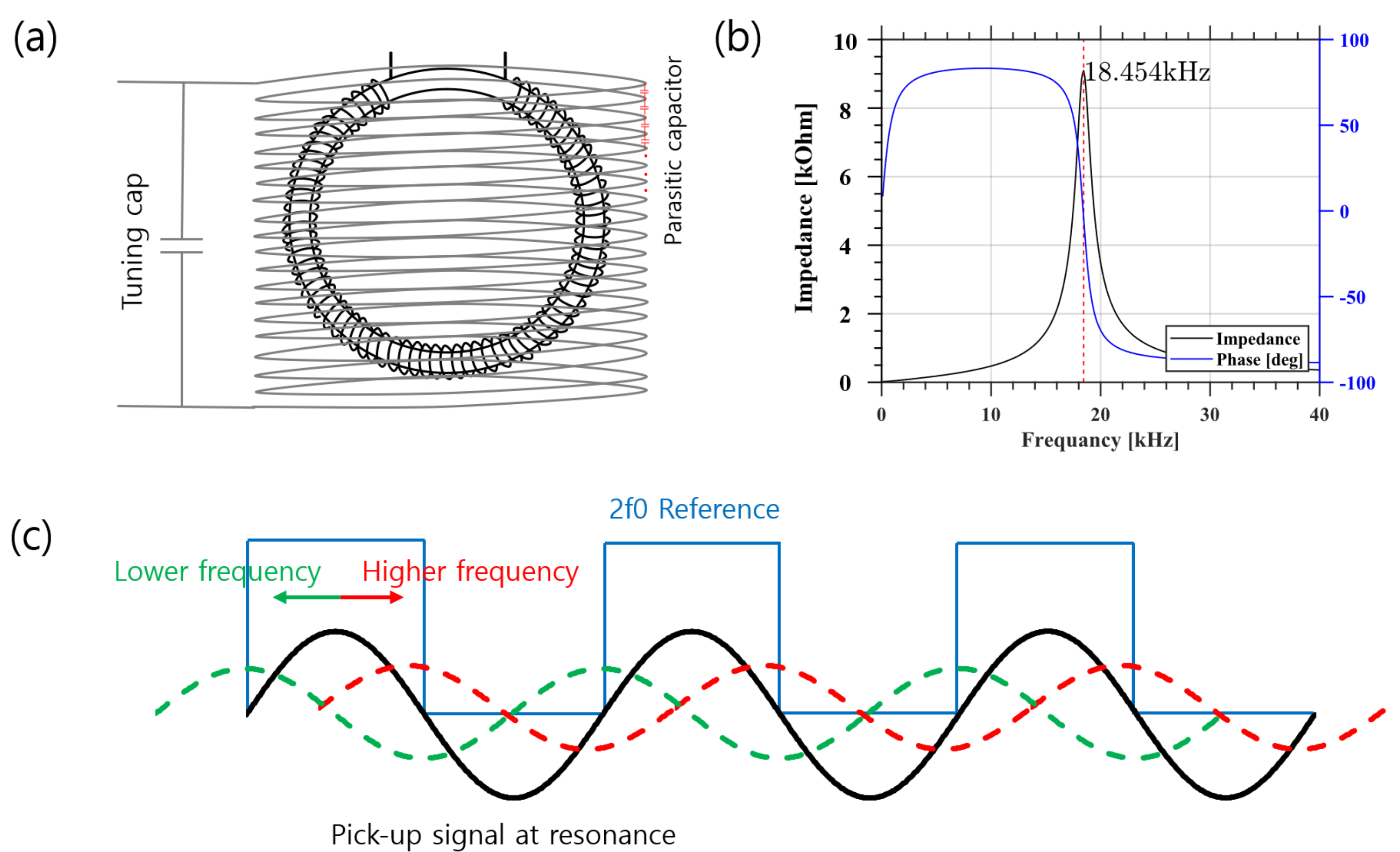
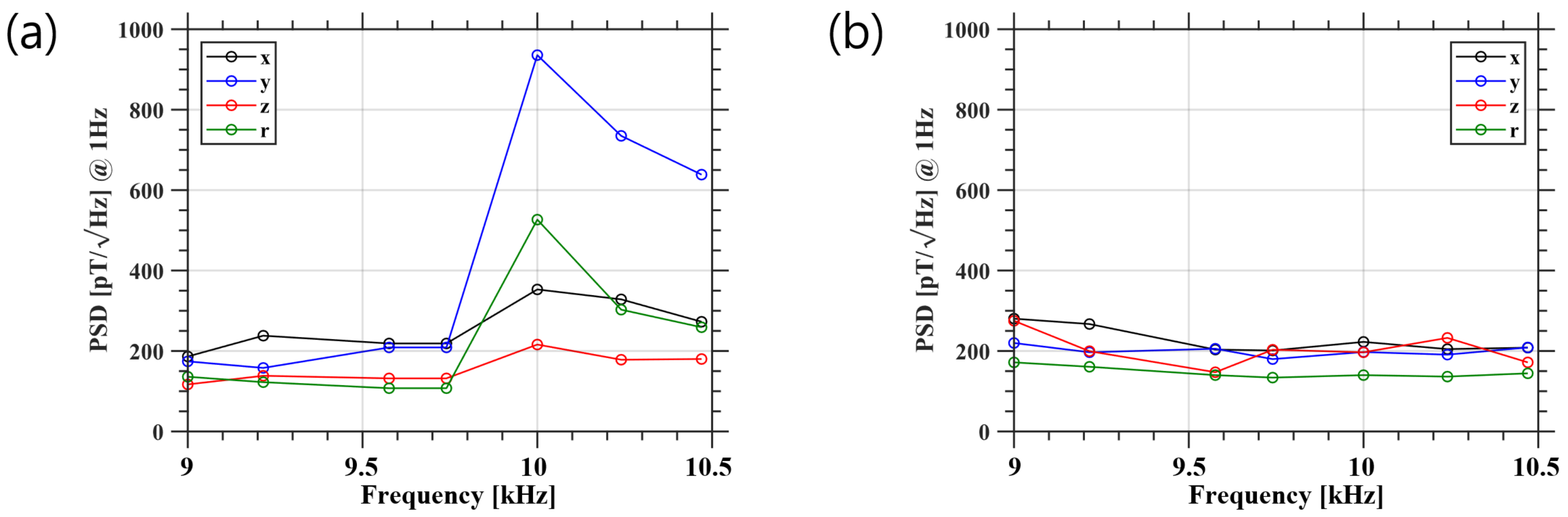
4.3. Optimization by an Adaptive In-Phase Circuit
5. Summary and Future Works
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| AIMAG | Adaptive In-phase MAGnetometer |
| CAS500-3 | The Third Compact Advanced Satellite 500 |
| CLTE | Coefficients of Linear Thermal Expansion |
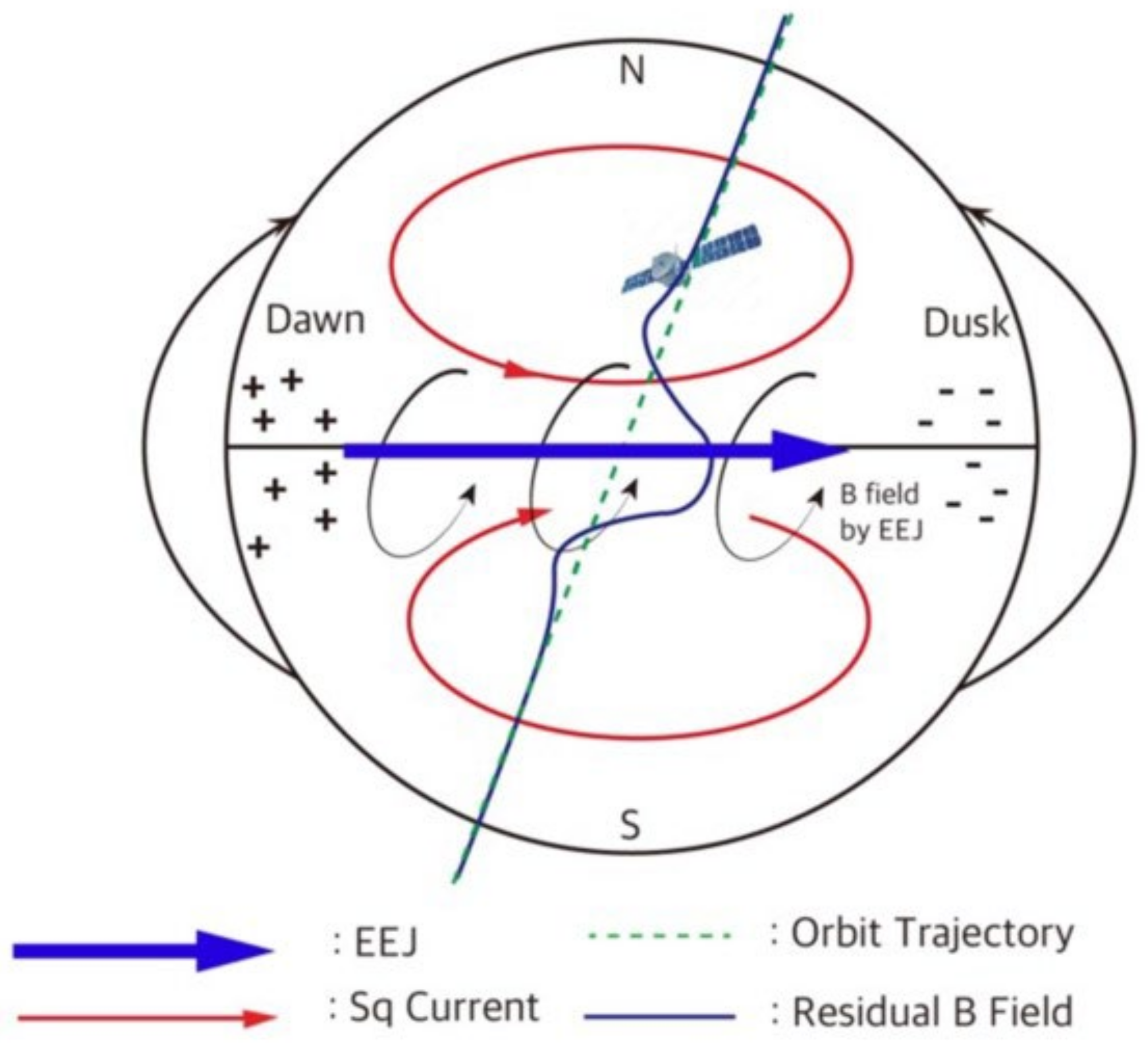
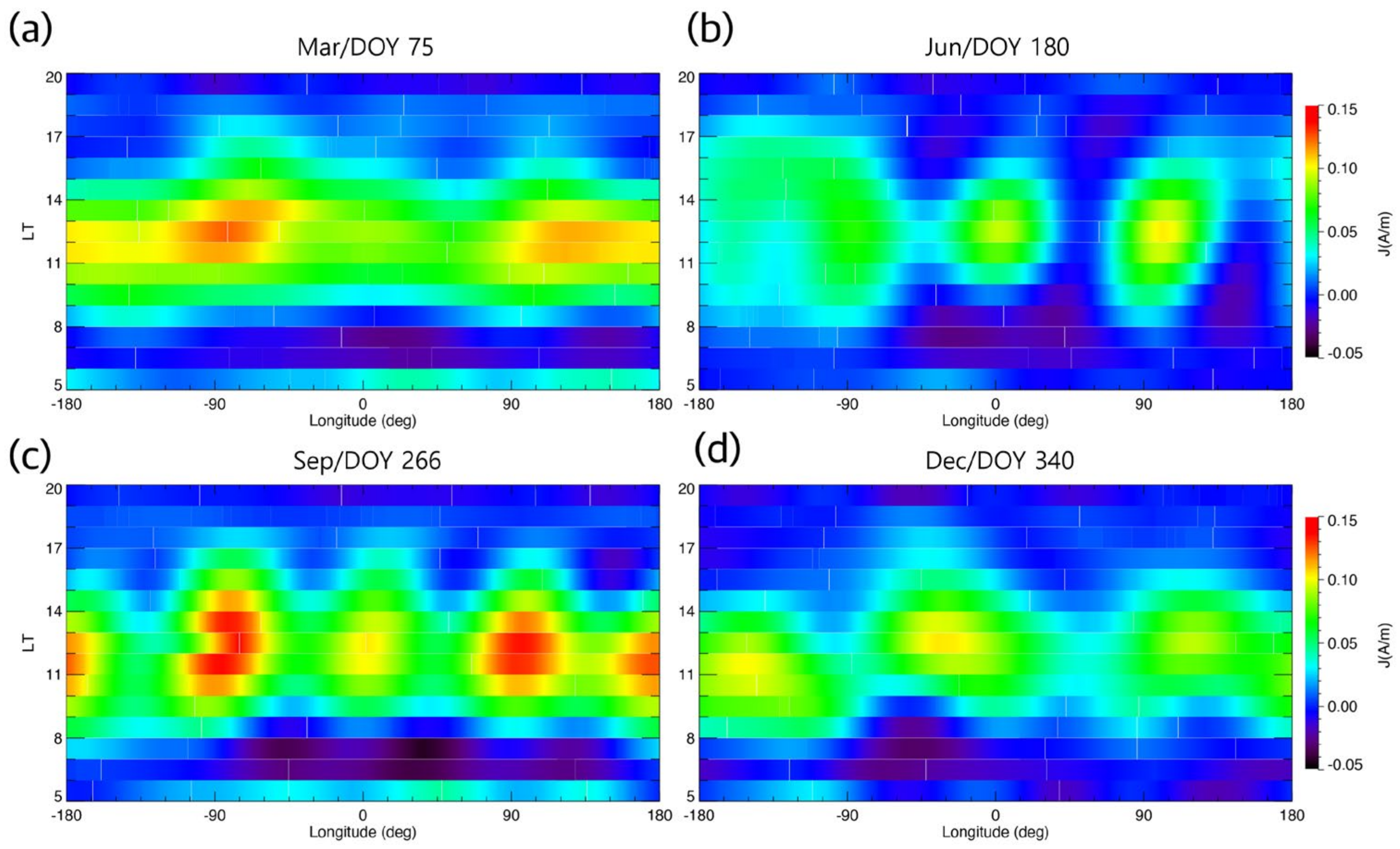
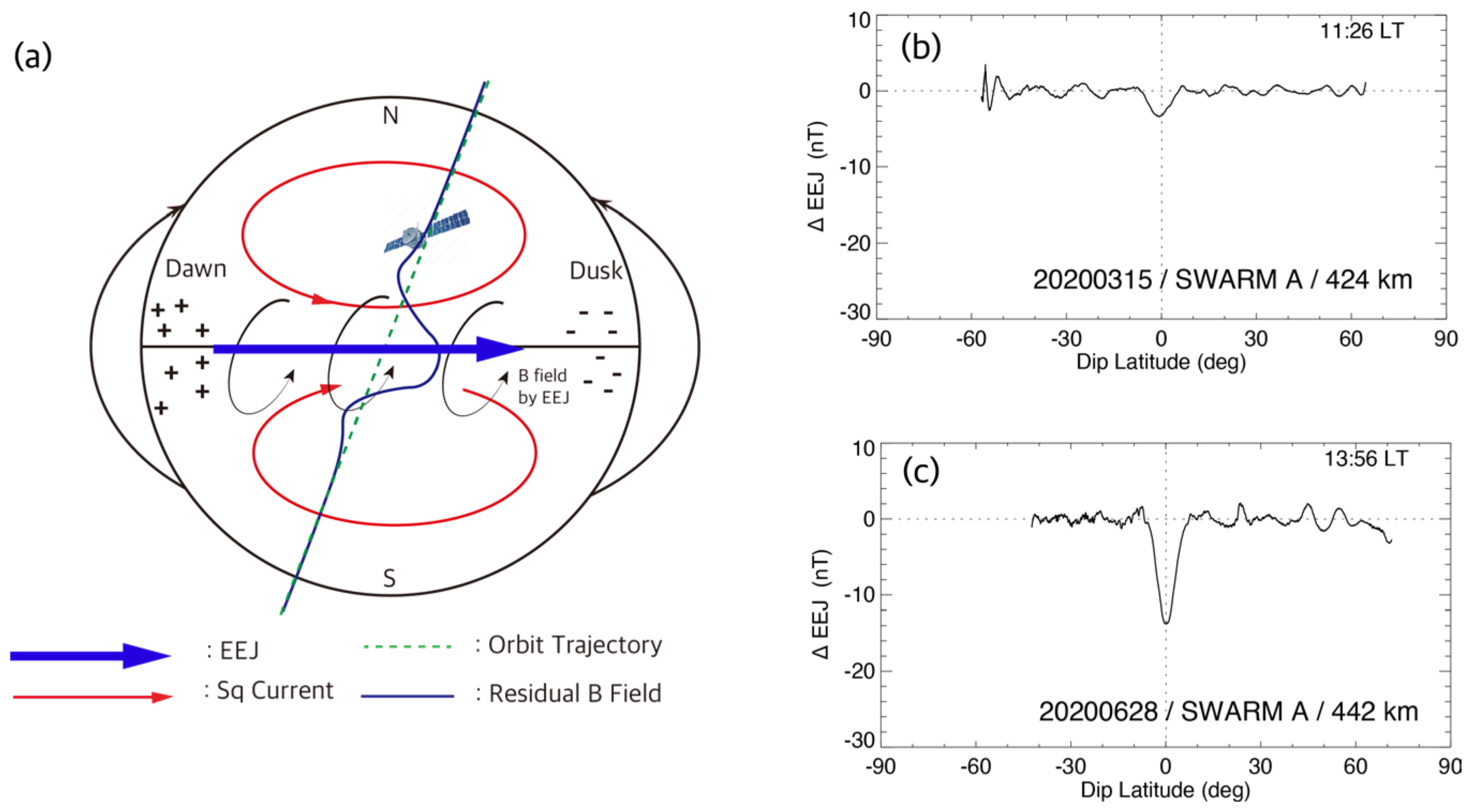
| EEJ | Equatorial Electrojet |
| EEJM | Equatorial Electrojet Model |
| EIA | Equatorial Ionization Anomaly |
| EQM | Engineering Qualification Model |
| FM | Flight Model |
| IAMMAP | Ionospheric Anomaly Monitoring by Magnetometer And Plasma-probe |
| IGRF | International Geomagnetic Reference Field |
| KSLV | Korean Space Launch Vehicle |
| PSD | Phase Sensitive Detector |
| RMS | Root Mean Square |
References
- Chapman, S. The equatorial electrojet as detected from the abnormal electric current distribution above Huancayo, Peru, and elsewhere. Arch. Meteorol. Geophys. Bioklimatol. Ser. A 1951, 4, 368–390. [Google Scholar] [CrossRef]
- Ness, N.F. Magnetometers for space research. Space Sci. Rev. 1970, 11, 459–554. [Google Scholar] [CrossRef]
- Acuna, M. Fluxgate magnetometers for outer planets exploration. IEEE Trans. Magn. 1974, 10, 519–523. [Google Scholar] [CrossRef]
- Auster, H.U.; Glassmeier, K.H.; Magnes, W.; Aydogar, O.; Baumjohann, W.; Constantinescu, D.; Fischer, D.; Fornacon, K.H.; Georgescu, E.; Harvey, P.; et al. The THEMIS Fluxgate Magnetometer. Space Sci. Rev. 2008, 141, 235–264. [Google Scholar] [CrossRef]
- Appleton, E.V. Two Anomalies in the Ionosphere. Nature 1946, 157, 691. [Google Scholar] [CrossRef]
- Yamazaki, Y.; Maute, A. Sq and EEJ—A Review on the Daily Variation of the Geomagnetic Field Caused by Ionospheric Dynamo Currents. Space Sci. Rev. 2017, 206, 299–405. [Google Scholar] [CrossRef]
- Namba, S.; Maeda, K.I. Radio Wave Propagation; Corona: Tokyo, Japan, 1939. [Google Scholar]
- Moffett, R.J.; Hanson, W.B. Effect of Ionization Transport on the Equatorial F-Region. Nature 1965, 206, 705–706. [Google Scholar] [CrossRef]
- Ryu, K.; Lee, S.; Woo, C.H. Design and validation of impedance probe for platform-independent ionospheric plasma diagnostics. Curr. Appl. Phys. 2023, 51, 71–79. [Google Scholar] [CrossRef]
- Aschenbrenner, H.; Goubau, G. Eine Anordnung zur Registrierung rascher magnetischer Störungen. Hochfrequenztech. Elektroakust. 1936, 47, 177–181. [Google Scholar]
- Geyger, A.W. The ring-core magnetometer “A new type of second-harmonic flux-gate magnetometer”. Trans. Am. Inst. Electr. Eng. Part I Commun. Electron. 1962, 81, 65–73. [Google Scholar] [CrossRef]
- Gordon, D.; Lundsten, R.; Chiarodo, R.; Helms, H. A fluxgate sensor of high stability for low field magnetometry. IEEE Trans. Magn. 1968, 4, 397–401. [Google Scholar] [CrossRef]
- Dolginov, S.S.; Zhuzgov, L.N.; Selyutin, V.A. Magnetometers in the Third Soviet Earth Satellite. Artif. Earth Satell. 1960, 4, 358–396. [Google Scholar]
- Acuña, M.; Scearce, C.; Seek, J.; Scheifele, J. The MAGSAT Vector Magnetometer: A Precision Fluxgate Magnetometer for the Measurement of the Geomagnetic Field; Technical report, GSFC; NASA: Washington, DC, USA, 1978. [Google Scholar]
- Nishio, Y.; Tohyama, F.; Onishi, N. The sensor temperature characteristics of a fluxgate magnetometer by a wide-range temperature test for a Mercury exploration satellite. Meas. Sci. Technol. 2007, 18, 2721. [Google Scholar] [CrossRef]
- Miles, D.M.; Mann, I.R.; Kale, A.; Milling, D.K.; Narod, B.B.; Bennest, J.R.; Barona, D.; Unsworth, M.J. The effect of winding and core support material on the thermal gain dependence of a fluxgate magnetometer sensor. Geosci. Instrum. Methods Data Syst. 2017, 6, 377–396. [Google Scholar] [CrossRef]
- Zhou, B.; Cheng, B.; Gou, X.; Li, L.; Zhang, Y.; Wang, J.; Magnes, W.; Lammegger, R.; Pollinger, A.; Ellmeier, M.; et al. First in-orbit results of the vector magnetic field measurement of the high precision magnetometer onboard the china seismo-electromagnetic satellite. Earth Planets Space 2019, 71, 119. [Google Scholar] [CrossRef]
- Alken, P.; Maus, S. Spatio-temporal characterization of the equatorial electrojet from CHAMP, Ørsted, and SAC-C satellite magnetic measurements. J. Geophys. Res. Space Phys. 2007, 112, A09305. [Google Scholar] [CrossRef]
- Thomas, N.; Vichare, G.; Sinha, A. Characteristics of equatorial electrojet derived from Swarm satellites. Adv. Space Res. 2017, 59, 1526–1538. [Google Scholar] [CrossRef]
- Ryu, K.; Kwak, Y.; Kim, Y.H.; Park, J.; Lee, J.; Min, K. Variation of the topside ionosphere during the last solar minimum period studied with multisatellite measurements of electron density and temperature. J. Geophys. Res. Space Phys. 2016, 121, 7269–7286. [Google Scholar] [CrossRef]
- Forbes, J.M.; Russell, J.; Miyahara, S.; Zhang, X.; Palo, S.; Mlynczak, M.; Mertens, C.J.; Hagan, M.E. Troposphere-thermosphere tidal coupling as measured by the SABER instrument on TIMED during July–September 2002. J. Geophys. Res. Space Phys. 2006, 111, A10S06. [Google Scholar] [CrossRef]
- Macmillan, S.; Olsen, N. Observatory data and the Swarm mission. Earth Planets Space 2013, 65, 15. [Google Scholar] [CrossRef]
- Alken, P.; Thébault, E.; Beggan, C.D.; Amit, H.; Aubert, J.; Baerenzung, J.; Bondar, T.N.; Brown, W.J.; Califf, S.; Chambodut, A.; et al. International Geomagnetic Reference Field: The thirteenth generation. Earth Planets Space 2021, 73, 49. [Google Scholar] [CrossRef]
- Constantinescu, O.D.; Auster, H.U.; Delva, M.; Hillenmaier, O.; Magnes, W.; Plaschke, F. Principal Component Gradiometer technique for removal of spacecraft-generated disturbances from magnetic field data. Geosci. Instrum. Methods Data Syst. Discuss. 2020, 2020, 1–26. [Google Scholar] [CrossRef]
- Liu, Y.; Sellmyer, D.; Shindo, D. Handbook of Advanced Magnetic Materials: Vol 1. Nanostructural Effects; Developments in Hydrobiology Series; Springer: New York, NY, USA, 2008. [Google Scholar] [CrossRef]
- Tang, S.; Duffy, M.; Ripka, P.; Hurley, W. Excitation circuit for fluxgate sensor using saturable inductor. Sens. Actuators A Phys. 2004, 113, 156–165. [Google Scholar] [CrossRef]
- Ripka, P. Fluxgate Sensors. In Magnetic Sensors and Magnetometers, 2nd ed.; Ripka, P., Magnes, W., Eds.; Artech House: Norwood, MA, USA, 2021. [Google Scholar]
- Ripka, P.; Billingsley, S. Fluxgate: Tuned vs. untuned output. IEEE Trans. Magn. 1998, 34, 1303–1305. [Google Scholar] [CrossRef]
- Miles, D.M.; Ciurzynski, M.; Barona, D.; Narod, B.B.; Bennest, J.R.; Kale, A.; Lessard, M.; Milling, D.K.; Larson, J.; Mann, I.R. Low-Noise Permalloy Ring-Cores for Fluxgate Magnetometers. Geosci. Instrum. Methods Data Syst. Discuss. 2019, 8, 227–240. [Google Scholar] [CrossRef]
- Tsai, C.S.; Yang, W.J.; Leu, M.S.; Lin, C.S. High frequency characteristics of annealed Co-base amorphous alloy ribbons. J. Appl. Phys. 1991, 70, 5846–5848. [Google Scholar] [CrossRef]
- Yang, J.; Kim, Y.; Ryu, K.; Kim, M.; Chung, Y.; Kim, T. Enhancement of permeability of Co-based amorphous alloy by two-step cooling method. J. Magn. Magn. Mater. 2000, 222, 65–69. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Instrument Parameter | Specifications |
|---|---|
| Measurement Range | ±65,000 nT |
| Resolution | <1 nT(RMS) |
| Noise Level | <300 at 1 Hz |
| Temperature Coefficient | ~0.1%/deg. |
| Case | Coercivity (A/m) | Squareness |
|---|---|---|
| As-cast | 6.78 | 0.37 |
| After Thermal Treatment | 1.92 | 0.81 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Ryu, K.; Choi, D.; Park, S.; Kim, J.; Cha, W.; Gu, B.; Hong, J.; Park, S.; Jang, E.; et al. Design and Testing of an Adaptive In-phase Magnetometer (AIMAG), the Equatorial-Electrojet-Detecting Fluxgate Magnetometer, for the CAS500-3 Satellite. Remote Sens. 2023, 15, 4829. https://doi.org/10.3390/rs15194829
Lee S, Ryu K, Choi D, Park S, Kim J, Cha W, Gu B, Hong J, Park S, Jang E, et al. Design and Testing of an Adaptive In-phase Magnetometer (AIMAG), the Equatorial-Electrojet-Detecting Fluxgate Magnetometer, for the CAS500-3 Satellite. Remote Sensing. 2023; 15(19):4829. https://doi.org/10.3390/rs15194829
Chicago/Turabian StyleLee, Seunguk, Kwangsun Ryu, Dooyoung Choi, Seongog Park, Jinkyu Kim, Wonho Cha, Bonju Gu, Jimin Hong, Suhwan Park, Eunjin Jang, and et al. 2023. "Design and Testing of an Adaptive In-phase Magnetometer (AIMAG), the Equatorial-Electrojet-Detecting Fluxgate Magnetometer, for the CAS500-3 Satellite" Remote Sensing 15, no. 19: 4829. https://doi.org/10.3390/rs15194829