
Generation of Multiple Frames for High Resolution Video SAR Based on Time Frequency Sub-Aperture Technique



Abstract
:1. Introduction
- (1)
- A full-aperture processing algorithm IETSA, which can be used for squint spotlight SAR data with large coherent integration angle, is proposed.
- (2)
- A high-resolution ViSAR data processing algorithm TFST based on TDS and FDS, which can balance imaging quality and efficiency, is proposed.
- (3)
- A series of high-resolution video frames can be acquired without sub-aperture reconstruction.
- (4)
- The detailed processing of accurate motion error compensation is given.
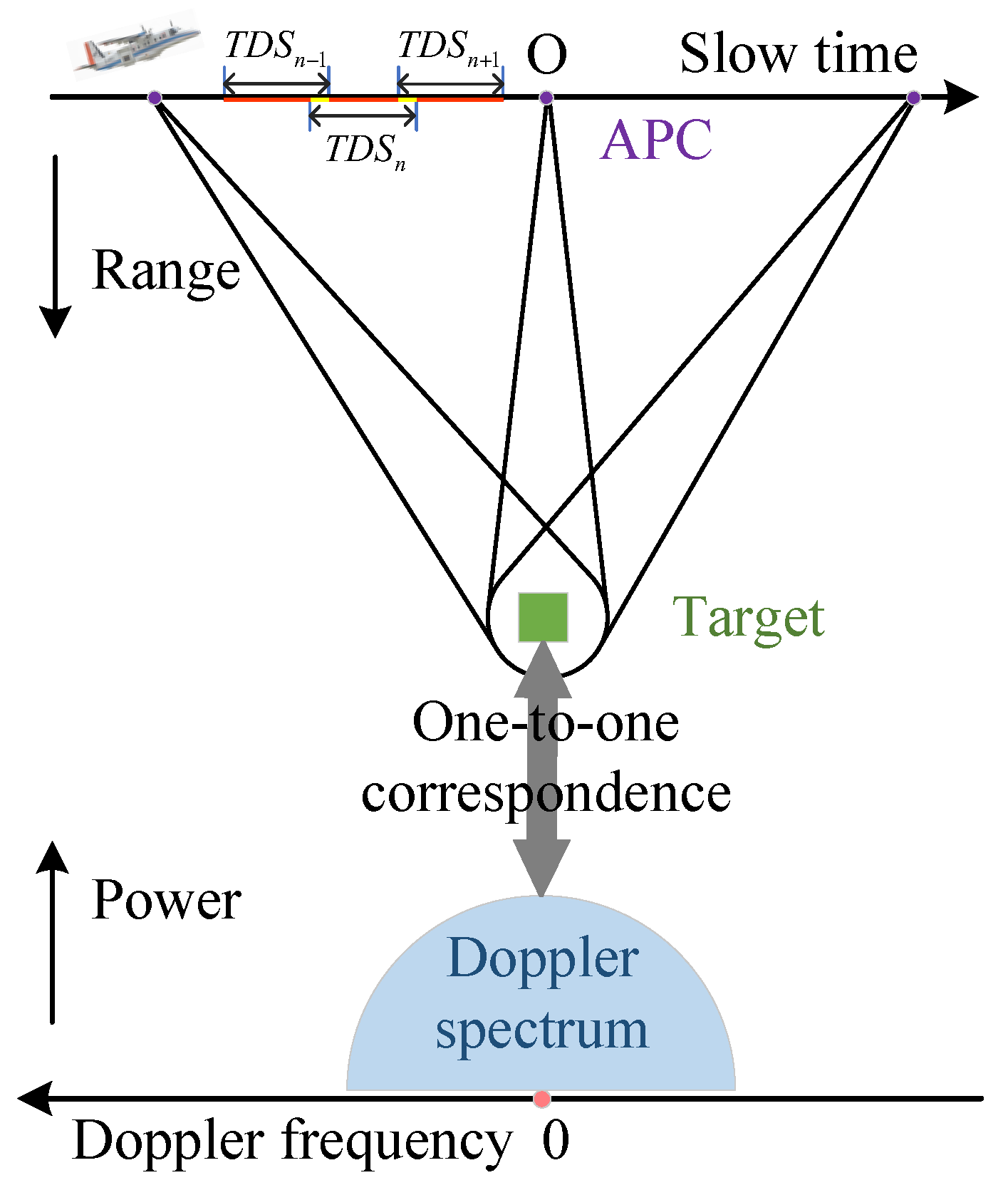
2. Geometric Model of Spotlight ViSAR and Problem Statement
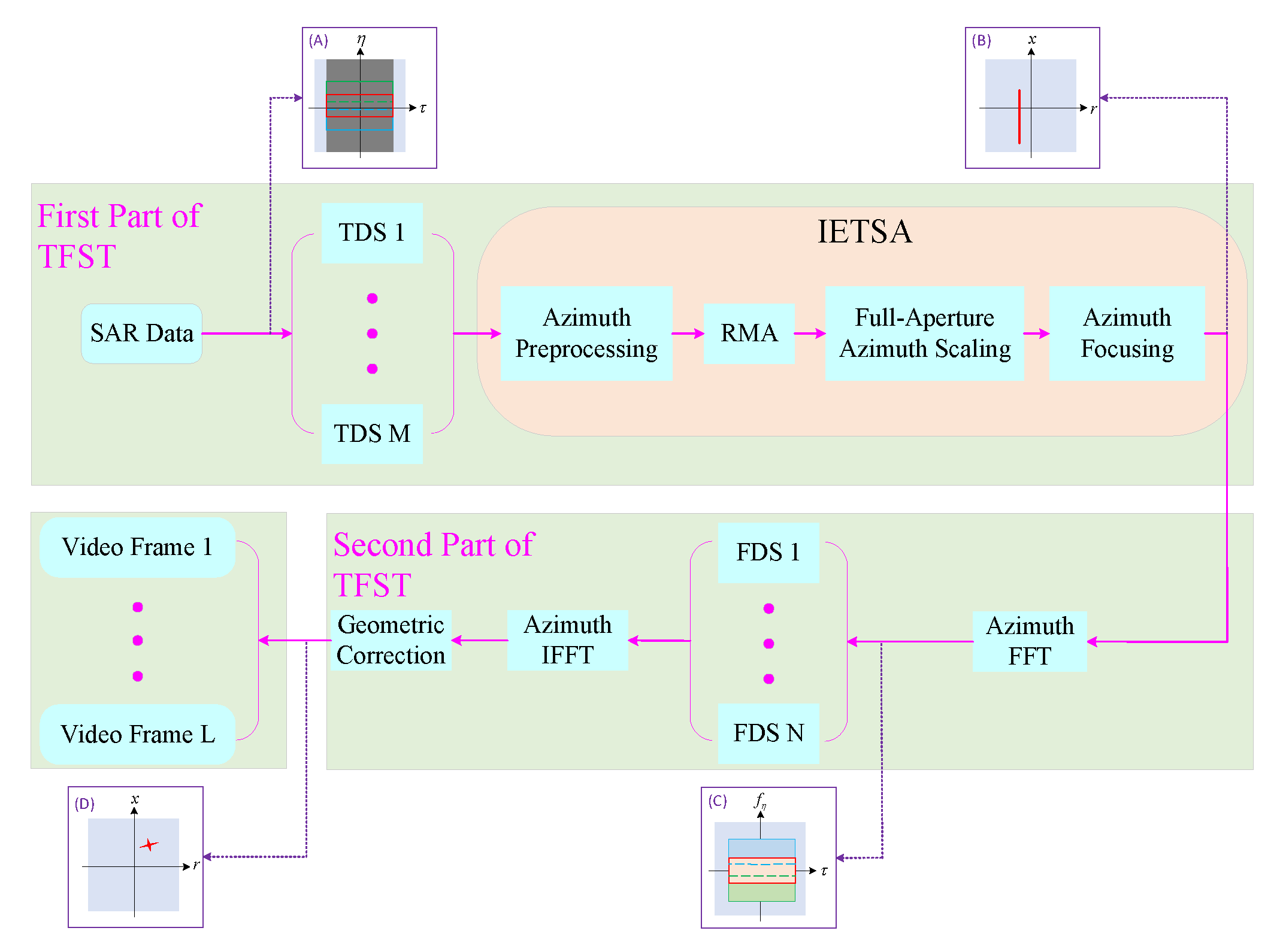
3. Methods
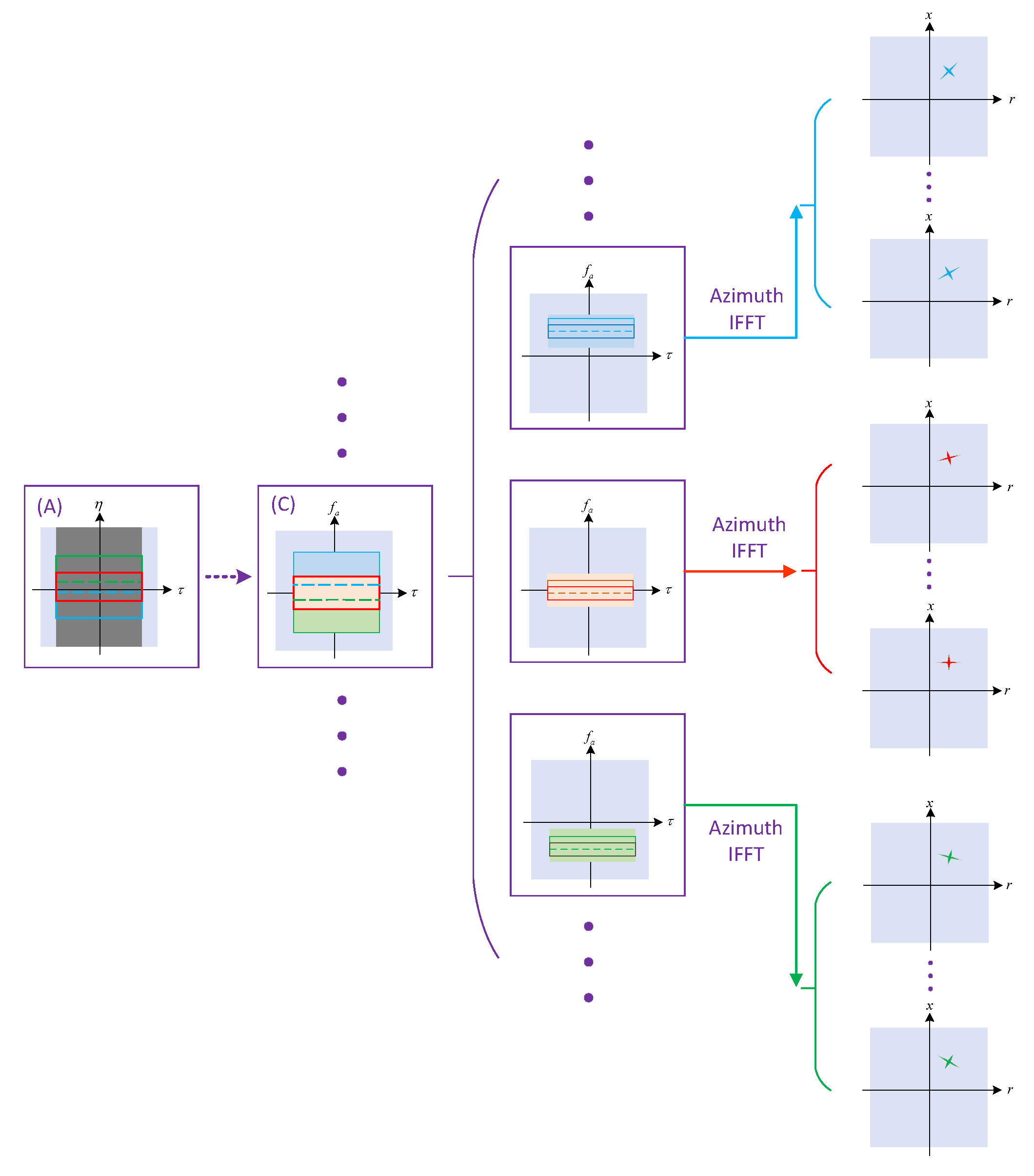
3.1. Azimuth Preprocessing in TFST
3.2. Modified Full-Aperture Azimuth Scaling
3.3. Motion Error Compensation in TFST
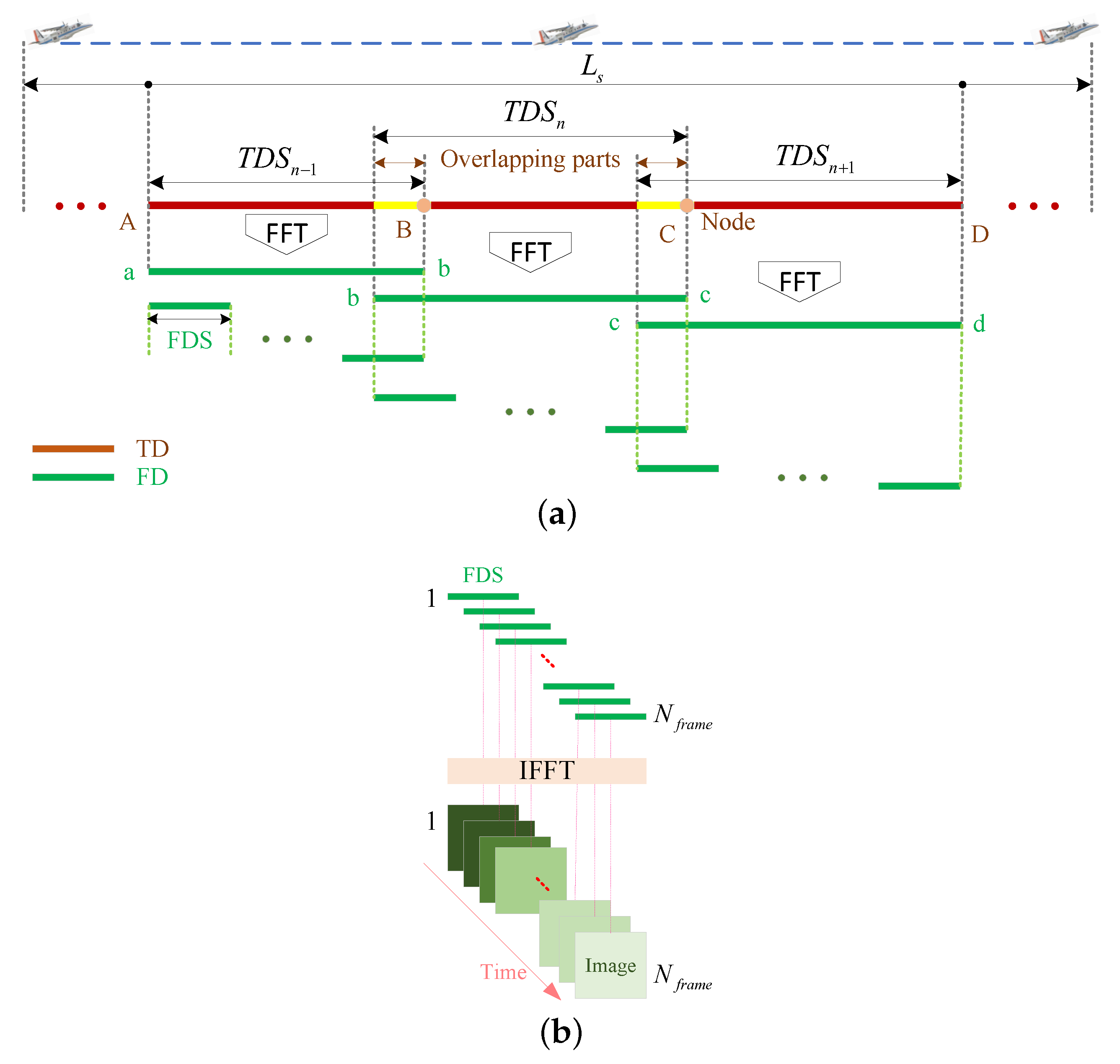
3.4. Fundamentals of TFST
3.5. Complexity Analysis of TFST
4. Results and Discussion
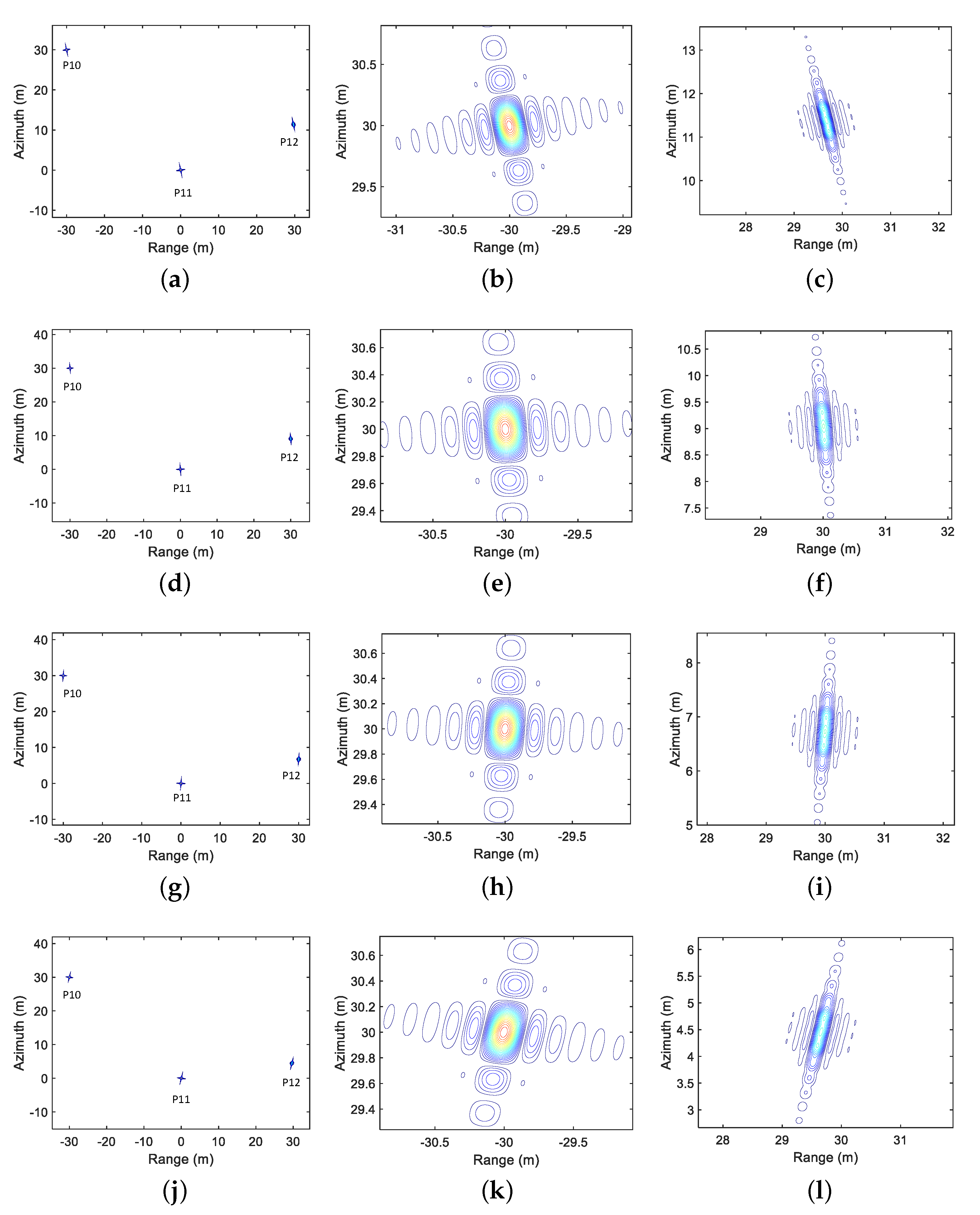
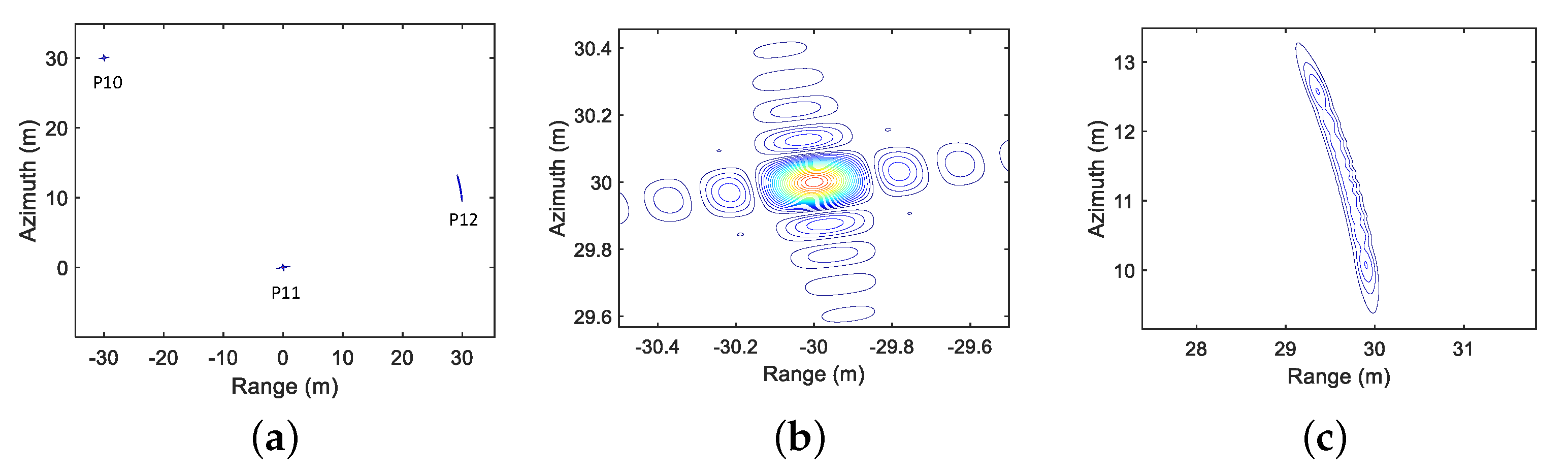
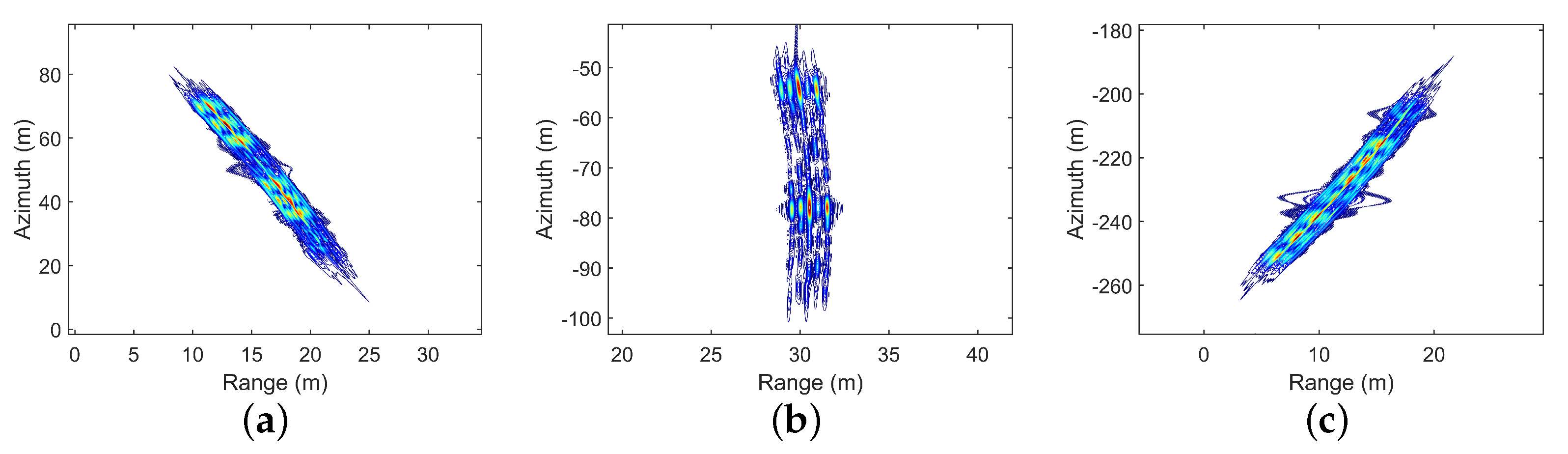
4.1. Simulation Results and Discussion
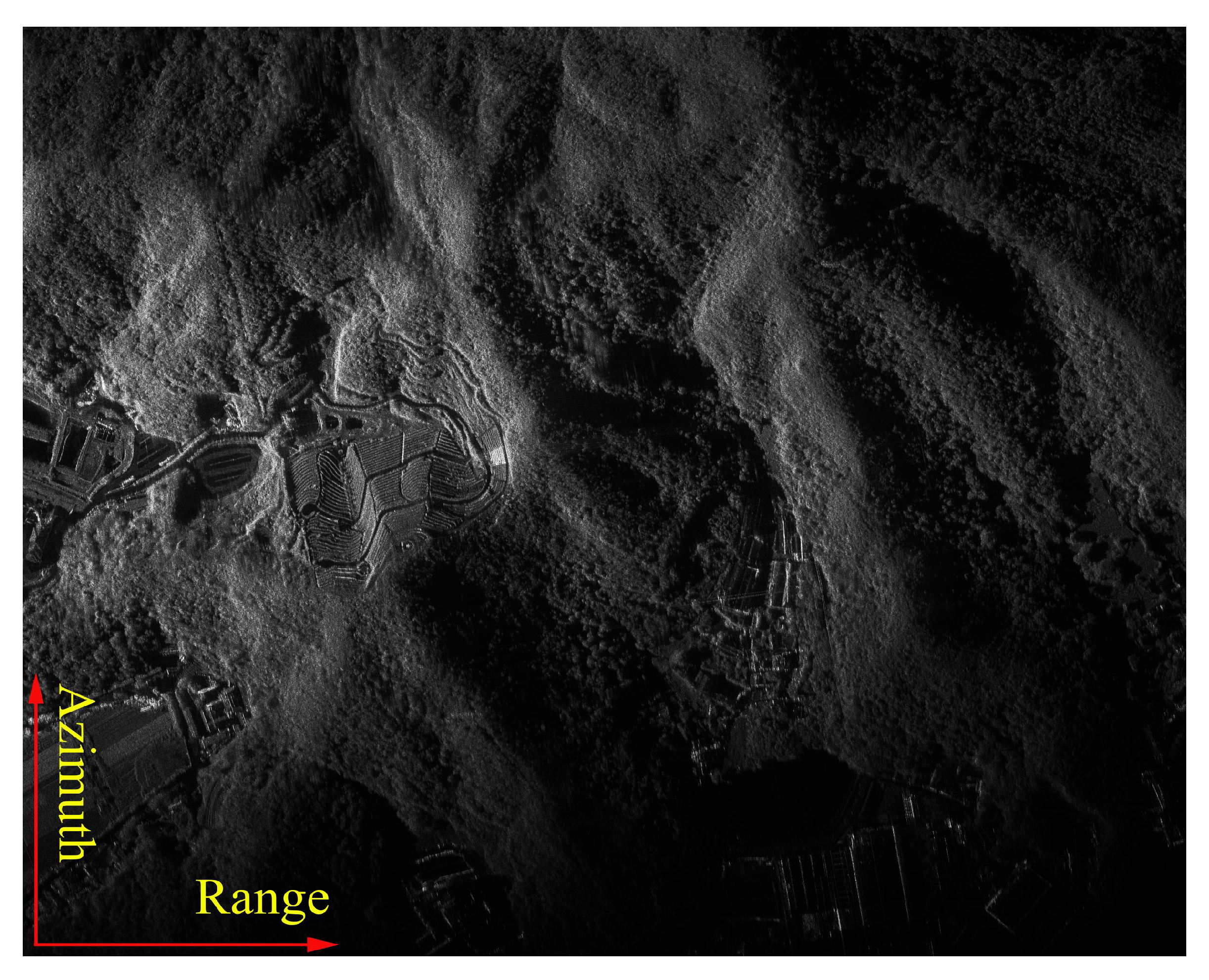
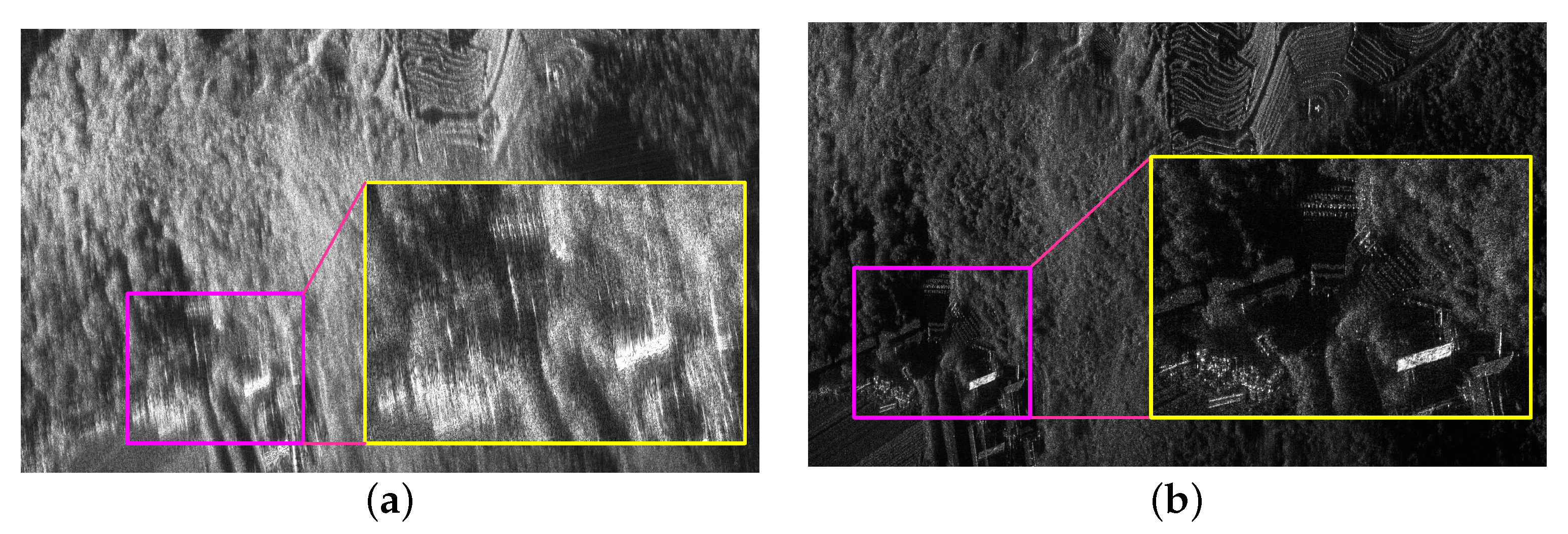
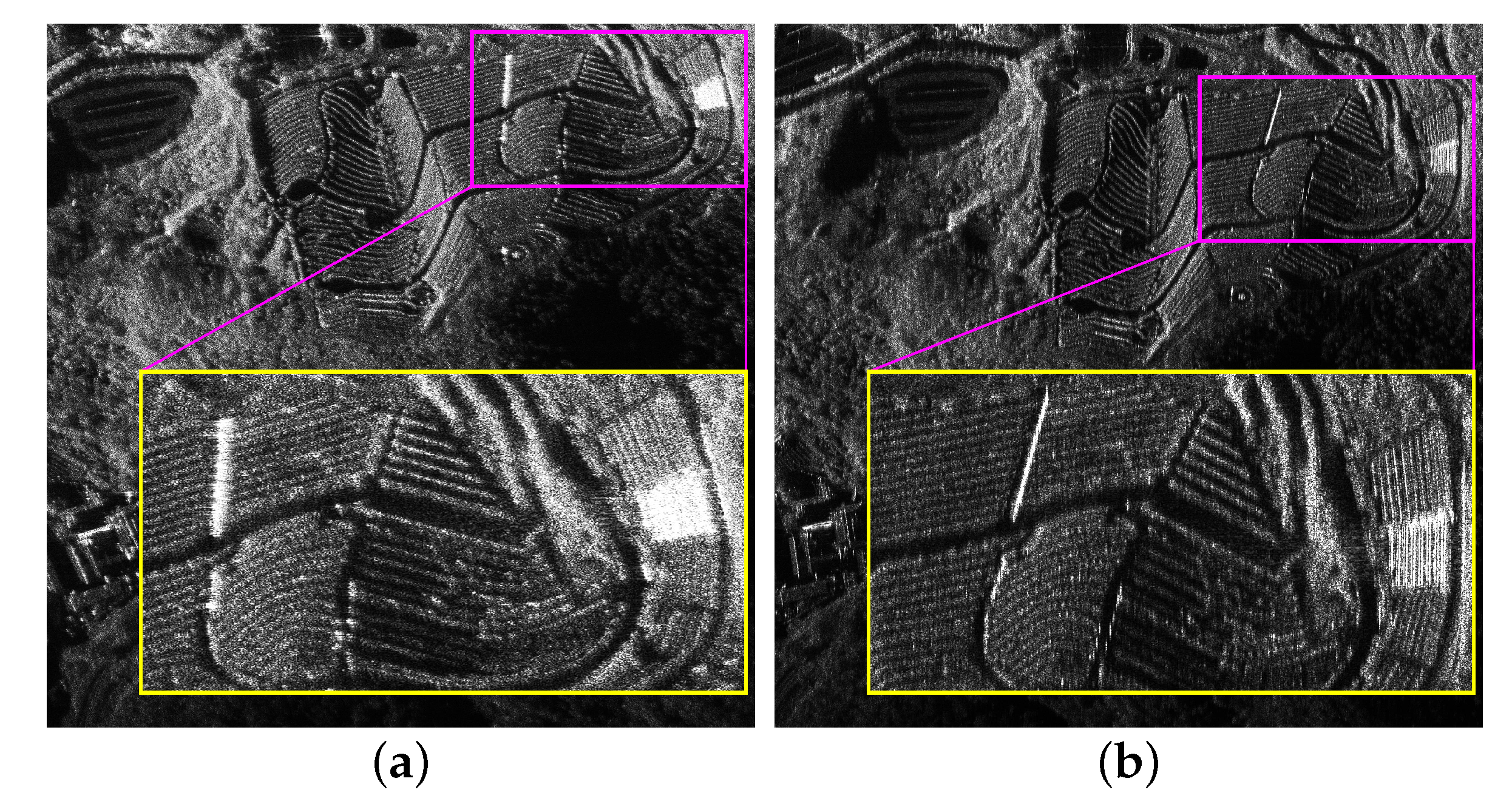
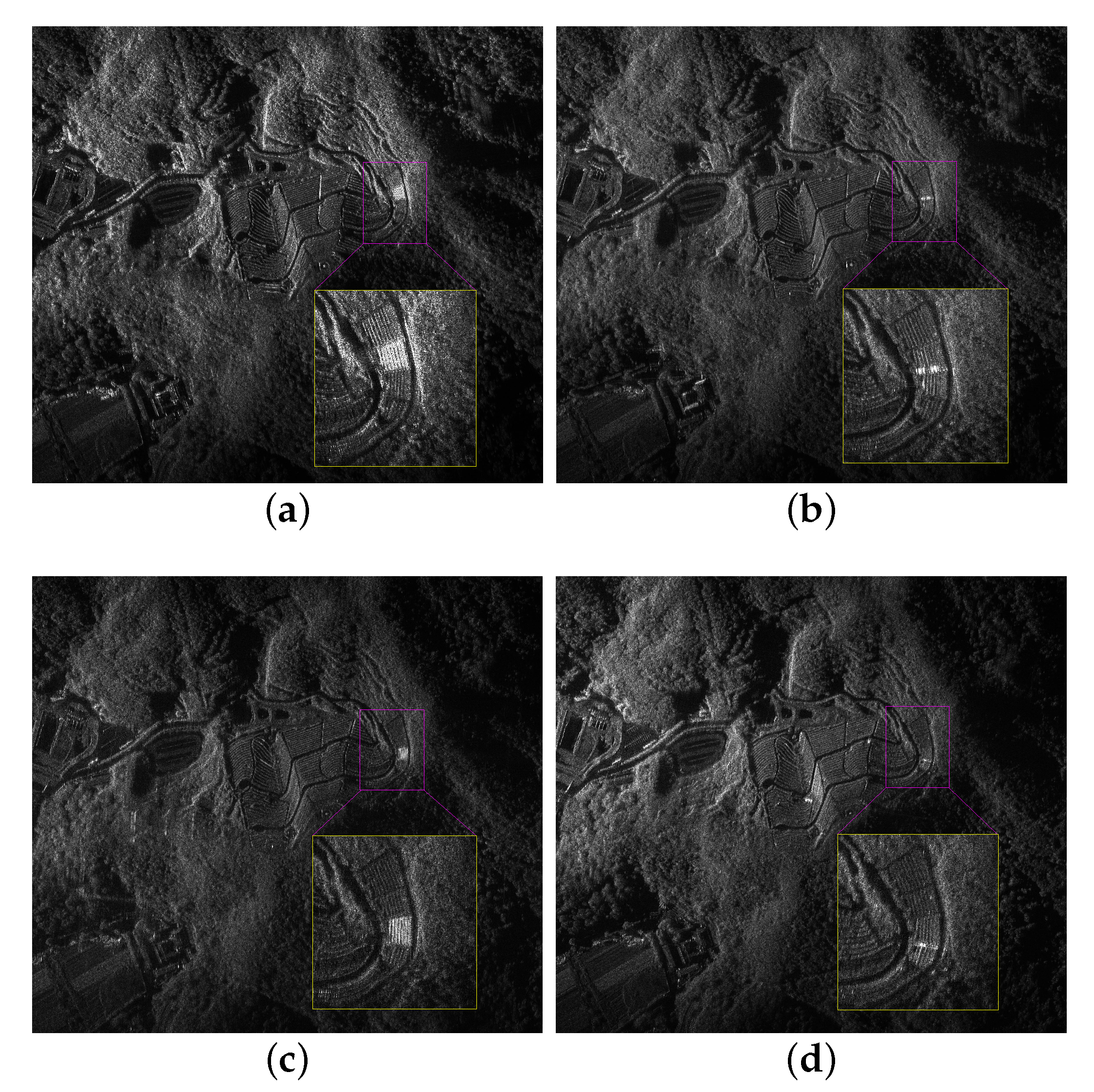
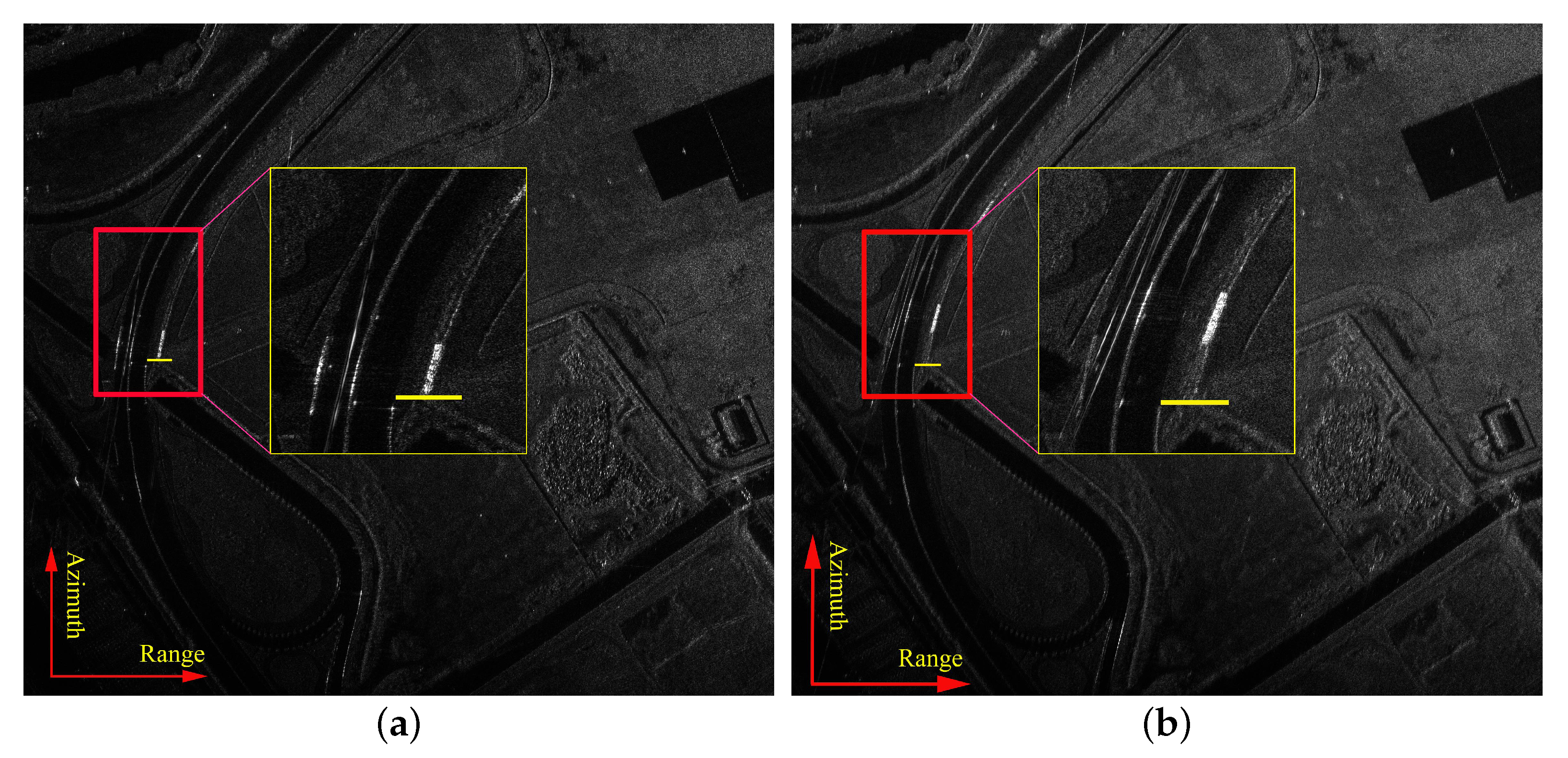
4.2. Airborne SAR Data Results and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A
References
- Curlander, J.C.; McDonough, R.N. Synthetic Aperture Radar; Wiley: New York, NY, USA, 1991; Volume 11. [Google Scholar]
- Soumekh, M. Synthetic Aperture Radar Signal Processing; Wiley: New York, NY, USA, 1999; Volume 7. [Google Scholar]
- Stilla, U. High resolution radar imaging of urban areas. In Proceedings of the Photogrammetric Week; Wichmann Verlag: Heidelberg, Germany, 2007. [Google Scholar]
- Moreira, A.; Prats-Iraola, P.; Younis, M.; Krieger, G.; Hajnsek, I.; Papathanassiou, K.P. A tutorial on synthetic aperture radar. IEEE Geosci. Remote. Sens. Mag. 2013, 1, 6–43. [Google Scholar] [CrossRef] [Green Version]
- Wells, L.; Sorensen, K.; Doerry, A.; Remund, B. Developments in SAR and IFSAR systems and technologies at Sandia National Laboratories. In Proceedings of the 2003 IEEE Aerospace Conference Proceedings (Cat. No. 03TH8652), Big Sky, MT, USA, 8–15 March 2003; Volume 2, pp. 2_1085–2_1095. [Google Scholar]
- Damini, A.; Balaji, B.; Parry, C.; Mantle, V. A videoSAR mode for the X-band wideband experimental airborne radar. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XVII; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7699, p. 76990E. [Google Scholar]
- Miller, J.; Bishop, E.; Doerry, A. An application of backprojection for video SAR image formation exploiting a sub-aperature circular shift register. In Proceedings of the Algorithms for Synthetic Aperture Radar Imagery XX; International Society for Optics and Photonics: bellingham, WA, USA, 2013; Volume 8746, p. 874609. [Google Scholar]
- Song, X.; Yu, W. Processing video-SAR data with the fast backprojection method. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 2838–2848. [Google Scholar] [CrossRef]
- Hu, R.; Min, R.; Pi, Y. A video-SAR imaging technique for aspect-dependent scattering in wide angle. IEEE Sens. J. 2017, 17, 3677–3688. [Google Scholar] [CrossRef]
- Kim, C.K.; Azim, M.T.; Singh, A.K.; Park, S.O. Doppler Shifting Technique for Generating Multi-Frames of Video SAR via Sub-Aperture Signal Processing. IEEE Trans. Signal Process. 2020, 68, 3990–4001. [Google Scholar] [CrossRef]
- Huang, X.; Xu, Z.; Ding, J. Video SAR image despeckling by unsupervised learning. IEEE Trans. Geosci. Remote. Sens. 2020, 59, 10151–10160. [Google Scholar] [CrossRef]
- Hartmann, F.; Sommer, A.; Pestel-Schiller, U.; Ostermann, J. A scheme for stabilizing the image generation for VideoSAR. In Proceedings of the EUSAR 2021, 13th European Conference on Synthetic Aperture Radar, Online, 29–31 April 2021; pp. 1–5. [Google Scholar]
- Bishop, E.; Linnehan, R.; Doerry, A. Video-SAR using higher order Taylor terms for differential range. In Proceedings of the 2016 IEEE Radar Conference (RadarConf); IEEE: New York, NY, USA, 2016; pp. 1–4. [Google Scholar]
- Soumekh, M. Time Domain Non-Linear SAR Processing; Technical Report; State University of New York at Buffalo Department of Electrical Engineering: Buffalo, NY, USA, 2006. [Google Scholar]
- Frey, O.; Magnard, C.; Ruegg, M.; Meier, E. Focusing of airborne synthetic aperture radar data from highly nonlinear flight tracks. IEEE Trans. Geosci. Remote. Sens. 2009, 47, 1844–1858. [Google Scholar] [CrossRef] [Green Version]
- McCorkle, J.W.; Rofheart, M. Order N 2 log (N) backprojector algorithm for focusing wide-angle wide-bandwidth arbitrary-motion synthetic aperture radar. In Proceedings of the Radar Sensor Technology; International Society for Optics and Photonics: Bellingham, WA, USA, 1996; Volume 2747, pp. 25–36. [Google Scholar]
- Xiao, S.; Munson, D.C.; Basu, S.; Bresler, Y. An N 2 logN back-projection algorithm for SAR image formation. In Proceedings of the Conference Record of the Thirty-Fourth Asilomar Conference on Signals, Systems and Computers (Cat. No. 00CH37154), Pacific Grove, CA, USA, 29 October–1 November 2000; Volume 1, pp. 3–7. [Google Scholar]
- Rogan, A.; Carande, R. Improving the fast back projection algorithm through massive parallelizations. In Proceedings of the Radar Sensor Technology XIV; International Society for Optics and Photonics: Bellingham, WA, USA, 2010; Volume 7669, p. 76690. [Google Scholar]
- Jian, L.; Running, Z.; Lixiang, M.; Zheng, L.; Ke, J.; Dawei, W.; Zhiyun, T. An efficient image formation algorithm for spaceborne video SAR. In Proceedings of the IGARSS 2018-2018 IEEE International Geoscience and Remote Sensing Symposium, Valencia, Spain, 22–27 July 2018; pp. 3675–3678. [Google Scholar]
- Pu, W.; Wang, X.; Wu, J.; Huang, Y.; Yang, J. Video SAR imaging based on low-rank tensor recovery. IEEE Trans. Neural Netw. Learn. Syst. 2020, 32, 188–202. [Google Scholar] [CrossRef]
- Yamaoka, T.; Suwa, K.; Hara, T.; Nakano, Y. Radar video generated from synthetic aperture radar image. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Beijing, China, 10–15 July 2016; pp. 6509–6512. [Google Scholar]
- Zhu, D.; Xiang, T.; Wei, W.; Ren, Z.; Yang, M.; Zhang, Y.; Zhu, Z. An extended two step approach to high-resolution airborne and spaceborne SAR full-aperture processing. IEEE Trans. Geosci. Remote. Sens. 2020, 59, 8382–8397. [Google Scholar] [CrossRef]
- Xing, M.; Wu, Y.; Zhang, Y.D.; Sun, G.C.; Bao, Z. Azimuth resampling processing for highly squinted synthetic aperture radar imaging with several modes. IEEE Trans. Geosci. Remote. Sens. 2013, 52, 4339–4352. [Google Scholar] [CrossRef]
- Cafforio, C.; Prati, C.; Rocca, F. SAR data focusing using seismic migration techniques. IEEE Trans. Aerosp. Electron. Syst. 1991, 27, 194–207. [Google Scholar] [CrossRef]
- Fornaro, G.; Sansosti, E.; Lanari, R.; Tesauro, M. Role of processing geometry in SAR raw data focusing. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 441–454. [Google Scholar] [CrossRef]
- Reigber, A.; Alivizatos, E.; Potsis, A.; Moreira, A. Extended wavenumber-domain synthetic aperture radar focusing with integrated motion compensation. IEE Proc.-Radar Sonar Navig. 2006, 153, 301–310. [Google Scholar] [CrossRef]
- Quegan, S. Spotlight Synthetic Aperture Radar: Signal Processing Algorithms. J. Atmos. Sol.-Terr. Phys. 1995, 59, 597–598. [Google Scholar] [CrossRef]
- Song, X. Research on VideoSAR Parameter Design and Fast Imaging Algorithms; Institute of Electronics, Chinese Academy of Sciences: Beijing, China, 2016. [Google Scholar]
- Lanari, R.; Zoffoli, S.; Sansosti, E.; Fornaro, G.; Serafino, F. New approach for hybrid strip-map/spotlight SAR data focusing. IEE Proc.-Radar Sonar Navig. 2001, 148, 363–372. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR data focusing based on a two-step processing approach. IEEE Trans. Geosci. Remote. Sens. 2001, 39, 1993–2004. [Google Scholar] [CrossRef]
- Liu, Y.; Xing, M.; Sun, G.; Lv, X.; Bao, Z.; Hong, W.; Wu, Y. Echo model analyses and imaging algorithm for high-resolution SAR on high-speed platform. IEEE Trans. Geosci. Remote. Sens. 2011, 50, 933–950. [Google Scholar] [CrossRef]
- Xu, W.; Deng, Y.; Huang, P.; Wang, R. Full-aperture SAR data focusing in the spaceborne squinted sliding-spotlight mode. IEEE Trans. Geosci. Remote. Sens. 2013, 52, 4596–4607. [Google Scholar] [CrossRef]
- Moreira, A.; Mittermayer, J.; Scheiber, R. Extended chirp scaling algorithm for air-and spaceborne SAR data processing in stripmap and ScanSAR imaging modes. IEEE Trans. Geosci. Remote. Sens. 1996, 34, 1123–1136. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight SAR data processing using the frequency scaling algorithm. IEEE Trans. Geosci. Remote. Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreira, A. Processing of sliding spotlight and TOPS SAR data using baseband azimuth scaling. IEEE Trans. Geosci. Remote. Sens. 2009, 48, 770–780. [Google Scholar] [CrossRef]
- De Macedo, K.A.C.; Scheiber, R.; Moreira, A. An autofocus approach for residual motion errors with application to airborne repeat-pass SAR interferometry. IEEE Trans. Geosci. Remote. Sens. 2008, 46, 3151–3162. [Google Scholar] [CrossRef] [Green Version]
- Chen, Z.; Zhang, Z.; Zhou, Y.; Wang, P.; Qiu, J. A Novel Motion Compensation Scheme for Airborne Very High Resolution SAR. Remote. Sens. 2021, 13, 2729. [Google Scholar] [CrossRef]
- Wahl, D.E.; Eichel, P.; Ghiglia, D.; Jakowatz, C. Phase gradient autofocus-a robust tool for high resolution SAR phase correction. IEEE Trans. Aerosp. Electron. Syst. 1994, 30, 827–835. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital processing of synthetic aperture radar data. Artech House 2005, 1, 108–110. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Carrier frequency | 9.6 GHz |
| Velocity | 116 m/s |
| Height | 6376.5 m |
| Incidence angle | 54.5° |
| Signal bandwidth | 1200 MHz |
| Sampling frequency | 1400 MHz |
| Signal pulse duration | 6.7 µs |
| Pulse repetition frequency | 3000 Hz |
| Length of antenna | 0.495 m |
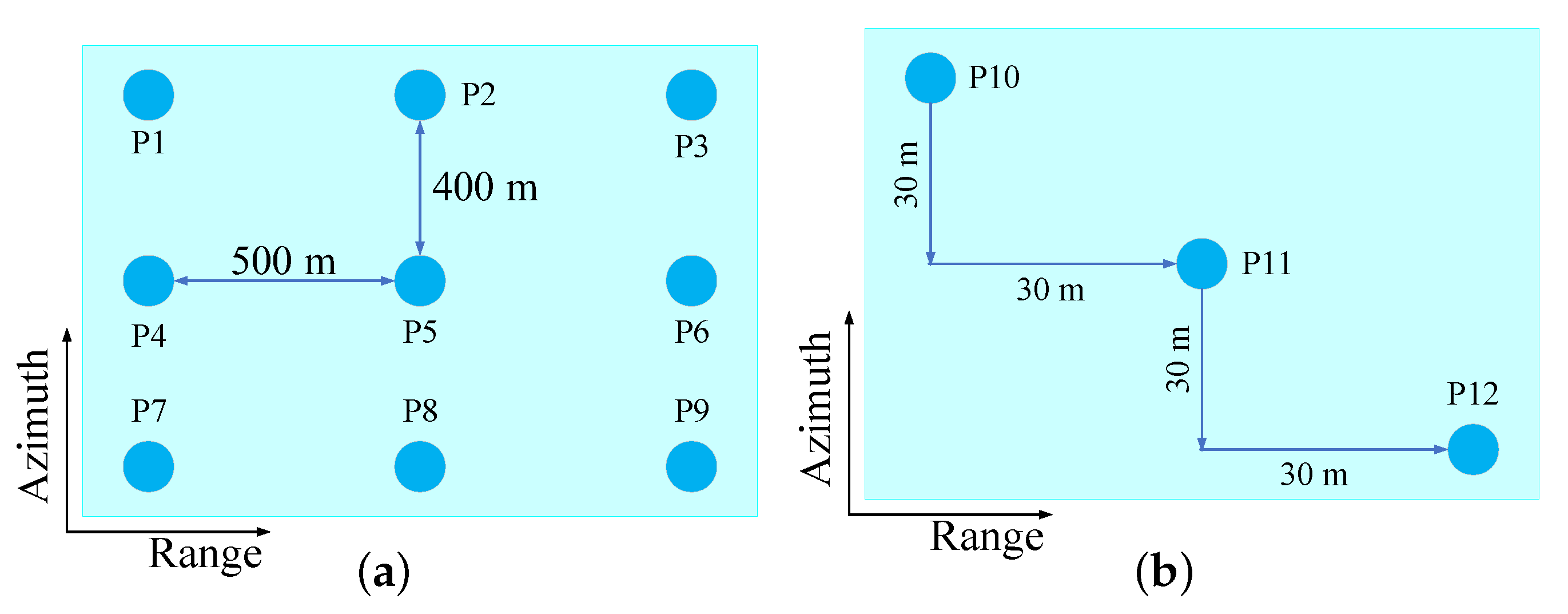
| Scene size (Range × Azimuth) | 1.0 km × 0.8 km |
| Point Targets | Azimuth | Range | ||||
|---|---|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | Resolution (m) | PSLR (dB) | ISLR (dB) | Resolution (m) | |
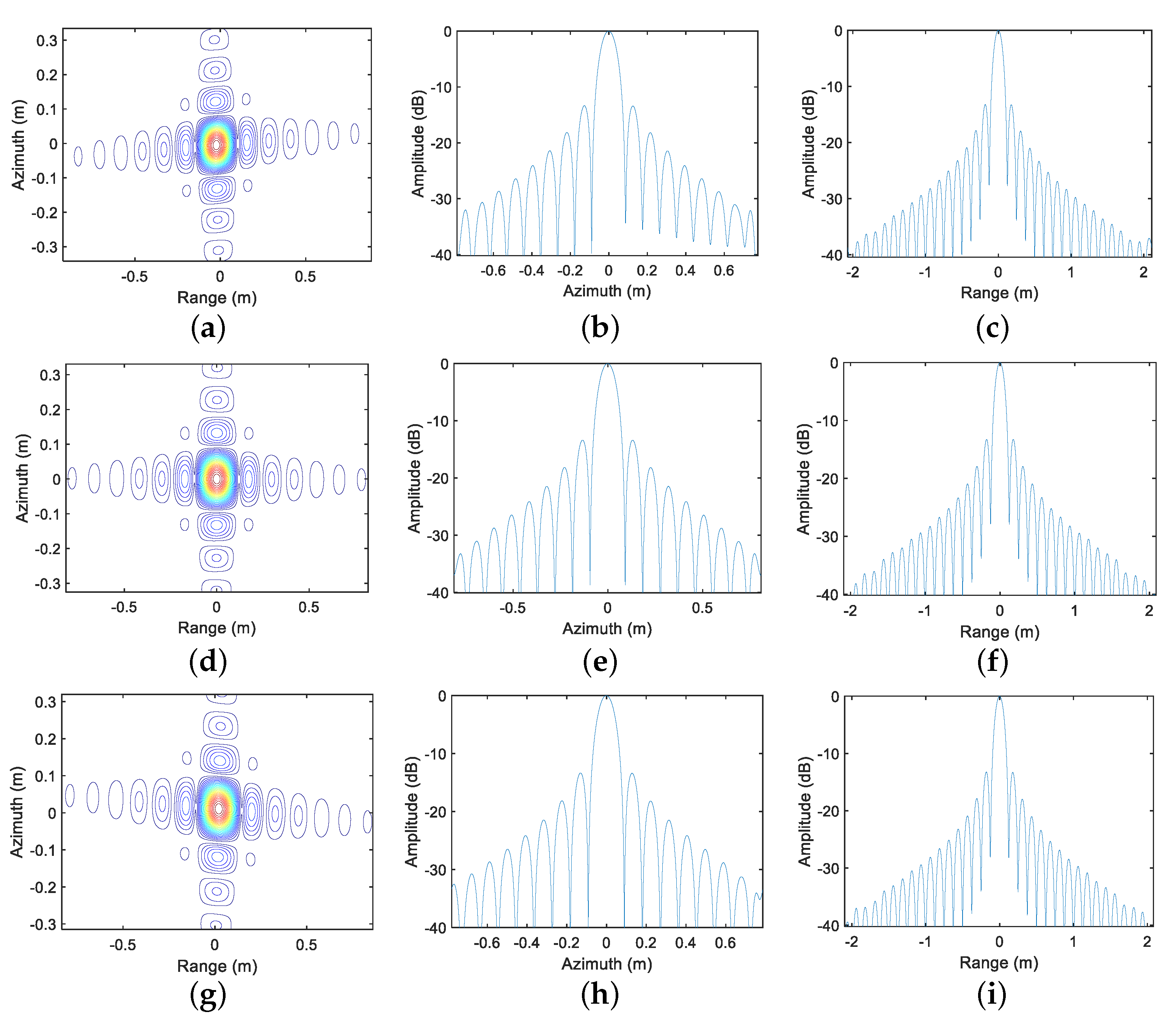
| P1 | ||||||
| P5 | ||||||
| P9 | ||||||
| Parameters | Value |
|---|---|
| Frame Rate | 2.3687 Hz |
| Start Squint Angle | 15° |
| End Squint Angle | −15° |
| Coherent Integration Time | 50.78 s |
| Video Frame Azimuth Resolution | 0.2379 m |
| Video Frame | Azimuth | Range | ||||
|---|---|---|---|---|---|---|
| PSLR (dB) | ISLR (dB) | Resolution (m) | PSLR (dB) | ISLR (dB) | Resolution (m) | |
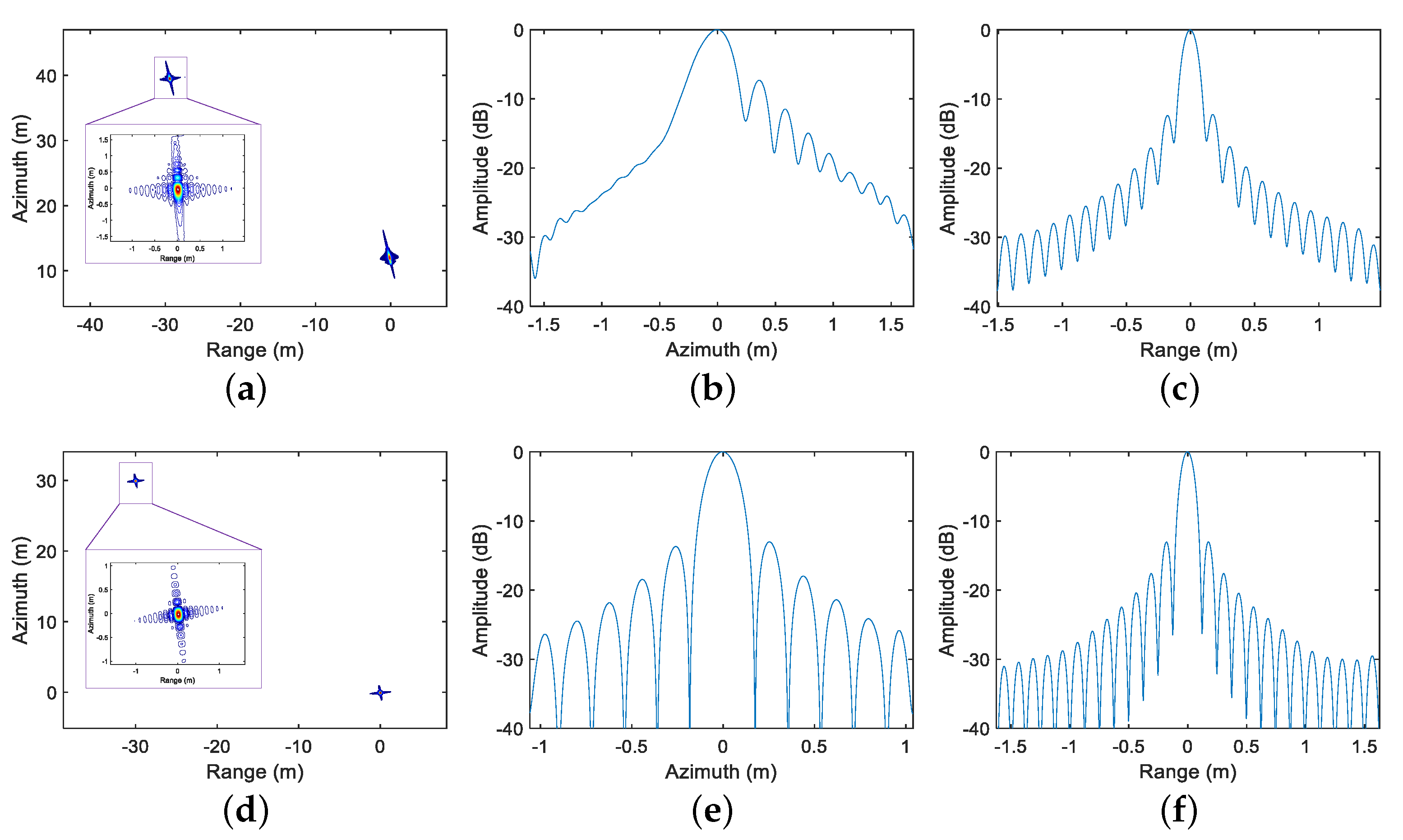
| 49 | −13.25 | −10.87 | 0.2303 | −13.26 | −10.25 | 0.1107 |
| 148 | −13.25 | −10.87 | 0.2303 | −13.26 | −10.25 | 0.1107 |
| 246 | −13.25 | −10.87 | 0.2303 | −13.26 | −10.25 | 0.1107 |
| 344 | −13.25 | −10.87 | 0.2302 | −13.26 | −10.25 | 0.1107 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, C.; Chen, Z.; Deng, Y.; Wang, W.; Wang, P.; Zhao, F. Generation of Multiple Frames for High Resolution Video SAR Based on Time Frequency Sub-Aperture Technique. Remote Sens. 2023, 15, 264. https://doi.org/10.3390/rs15010264
Yang C, Chen Z, Deng Y, Wang W, Wang P, Zhao F. Generation of Multiple Frames for High Resolution Video SAR Based on Time Frequency Sub-Aperture Technique. Remote Sensing. 2023; 15(1):264. https://doi.org/10.3390/rs15010264
Chicago/Turabian StyleYang, Congrui, Zhen Chen, Yunkai Deng, Wei Wang, Pei Wang, and Fengjun Zhao. 2023. "Generation of Multiple Frames for High Resolution Video SAR Based on Time Frequency Sub-Aperture Technique" Remote Sensing 15, no. 1: 264. https://doi.org/10.3390/rs15010264