
Generating Paired Seismic Training Data with Cycle-Consistent Adversarial Networks
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Methods
2.1. Cycle-Consistent Adversarial Networks
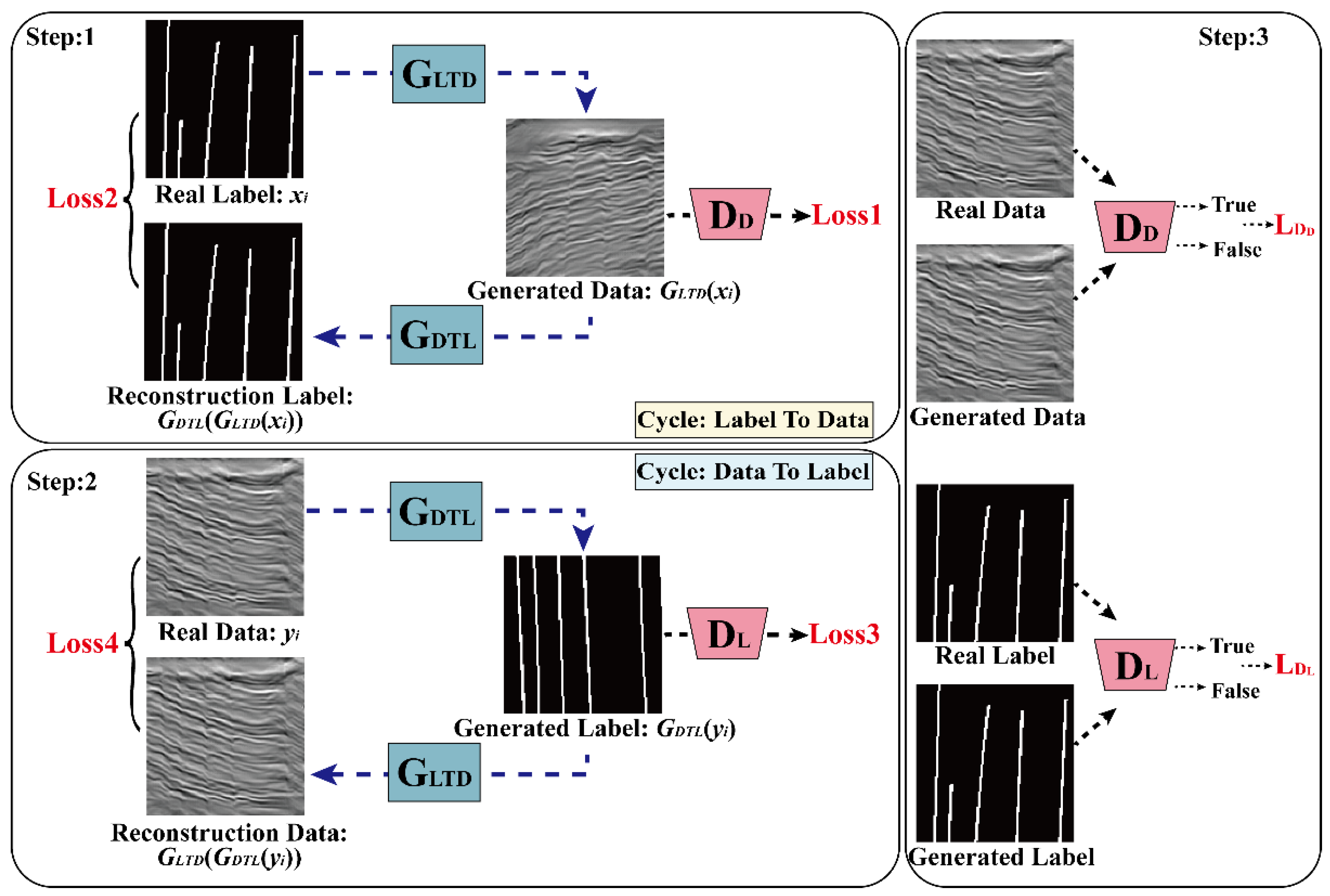
2.2. Label-to-Data Networks and Training Process
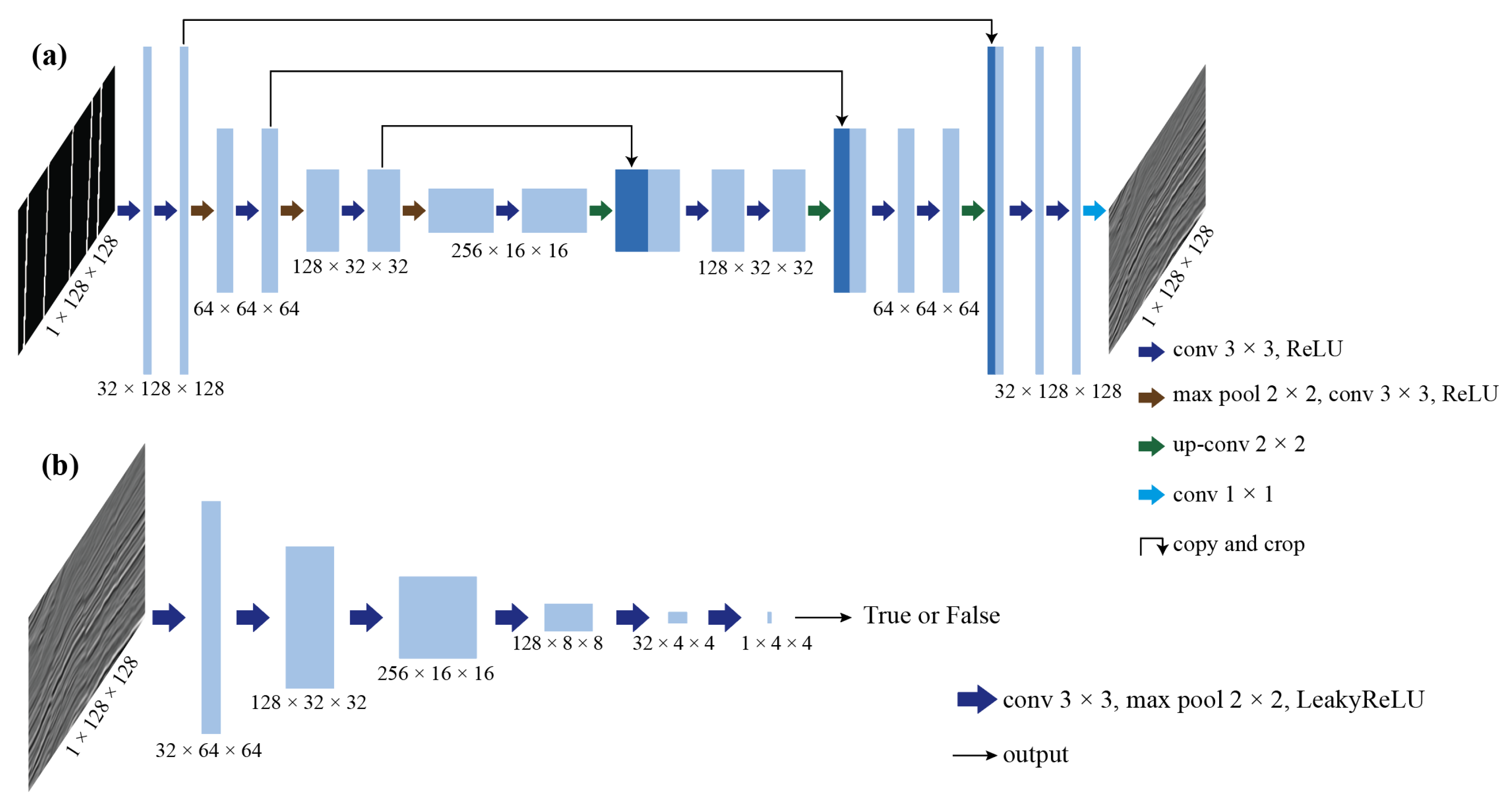
2.3. Networks Parameters and Training details
3. Results
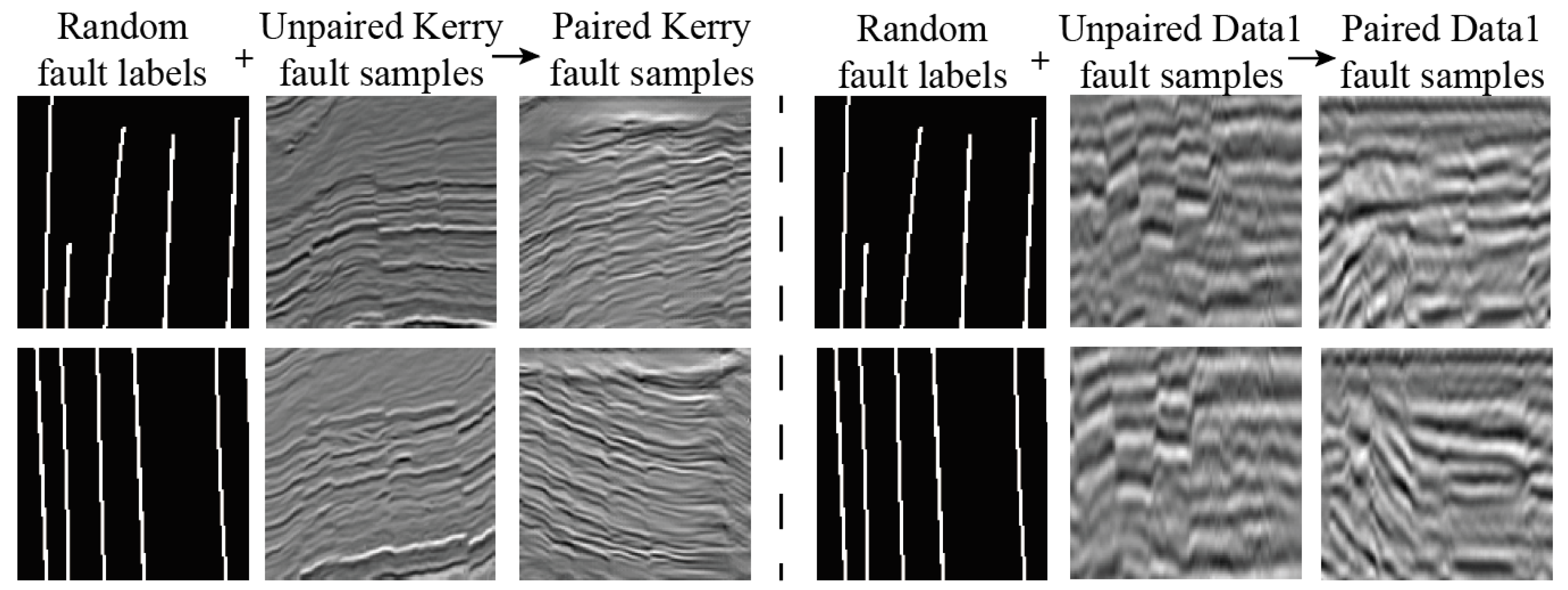
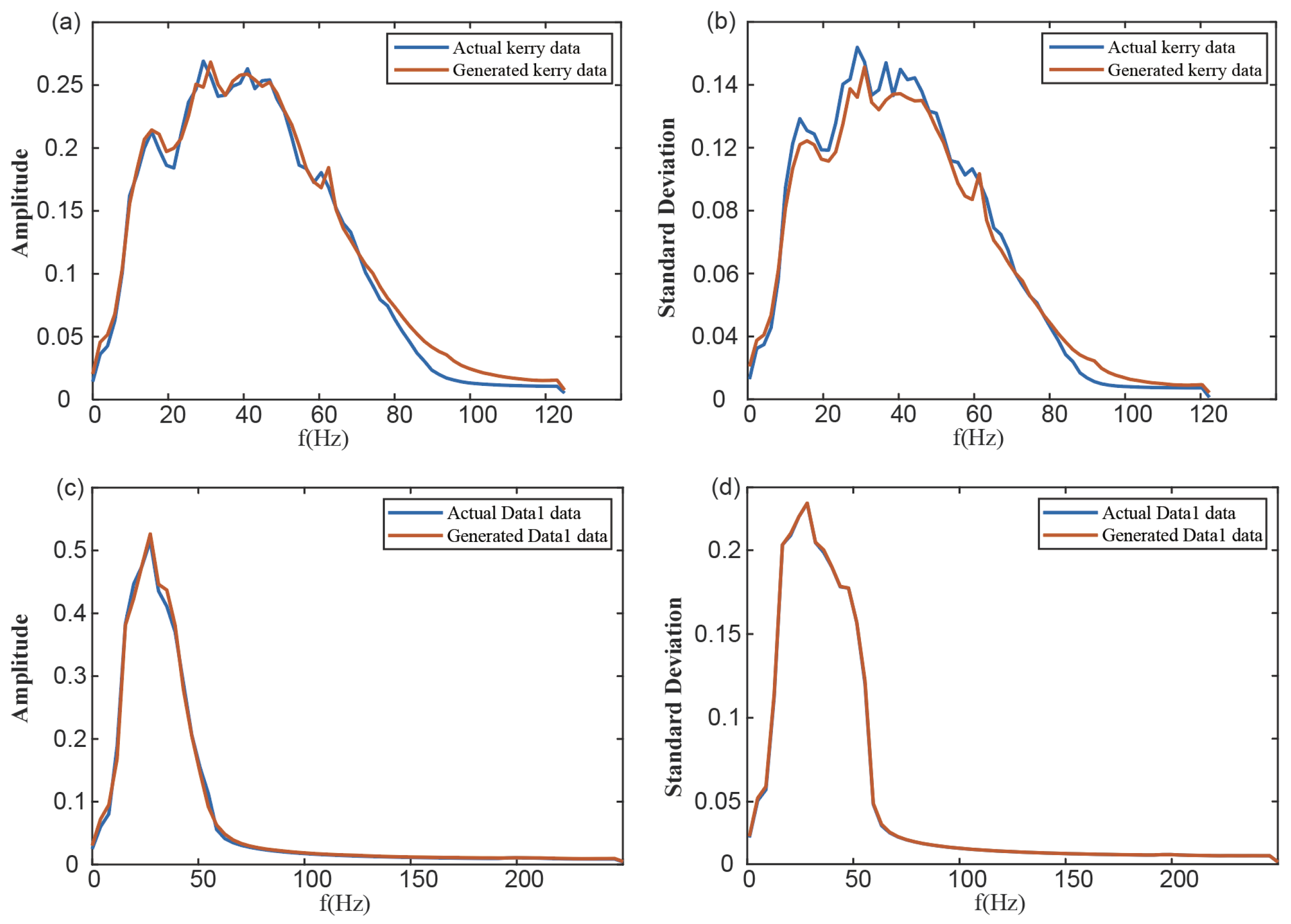
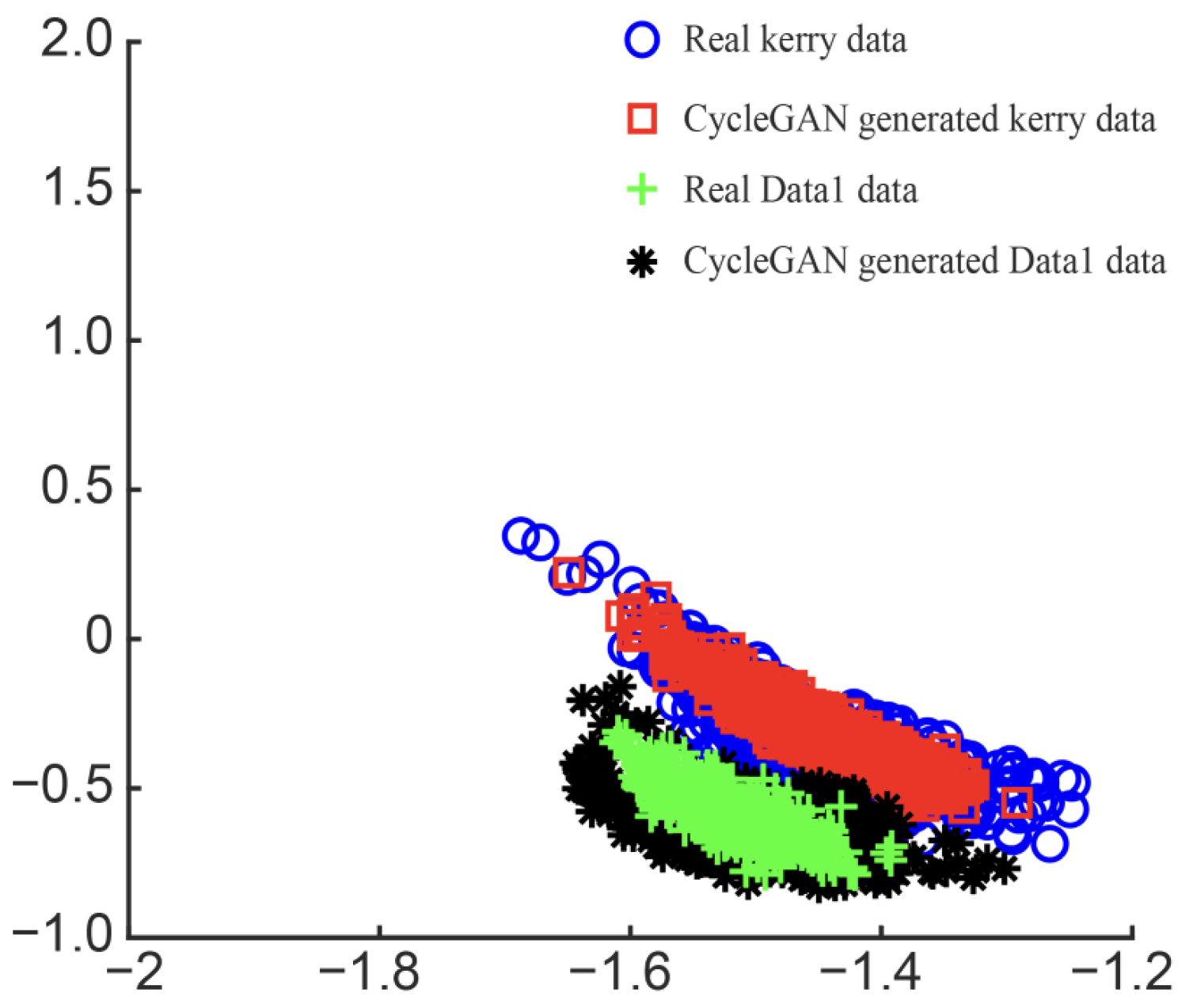
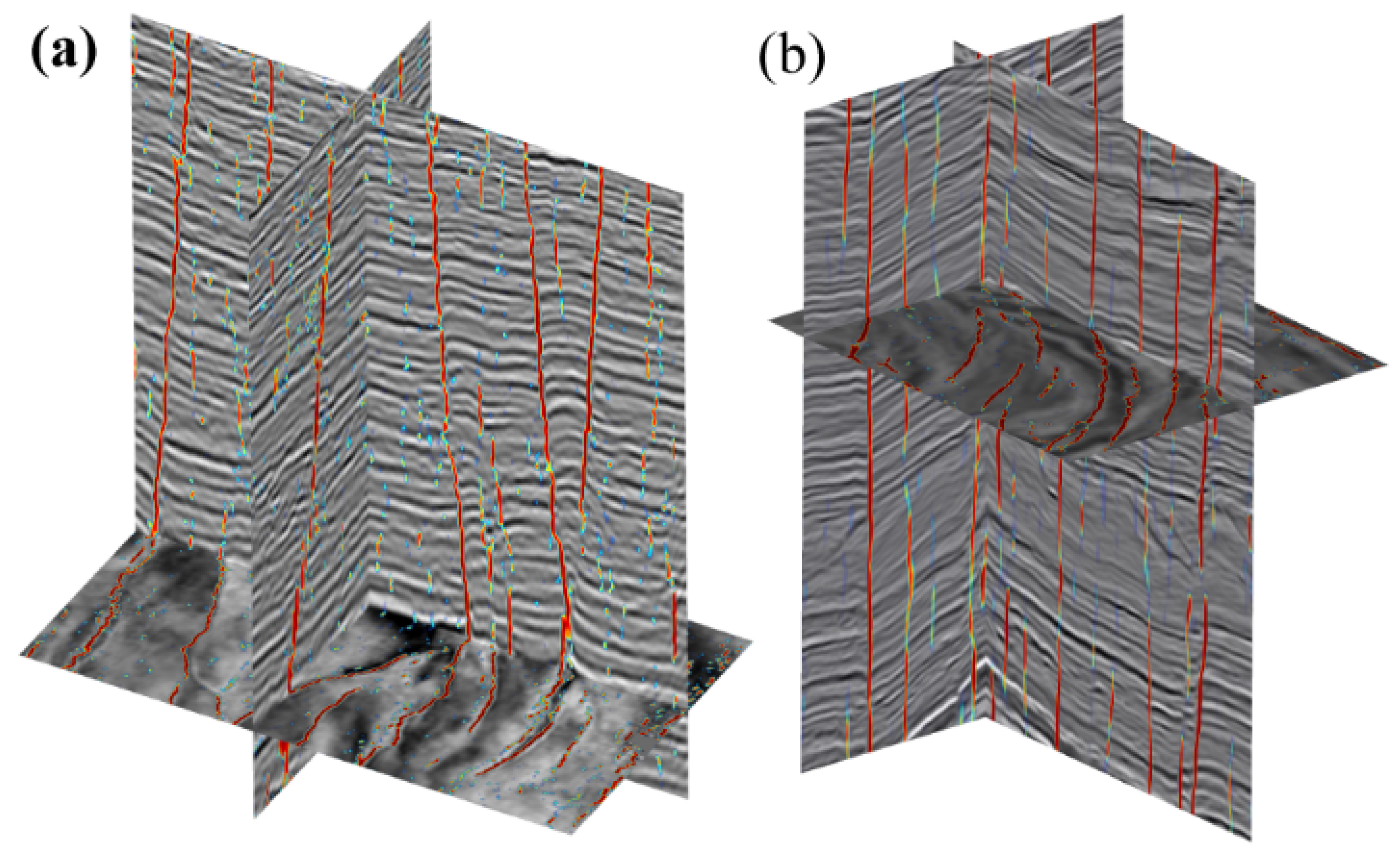
3.1. Application in Kerry3D and Data1 Samples Generation
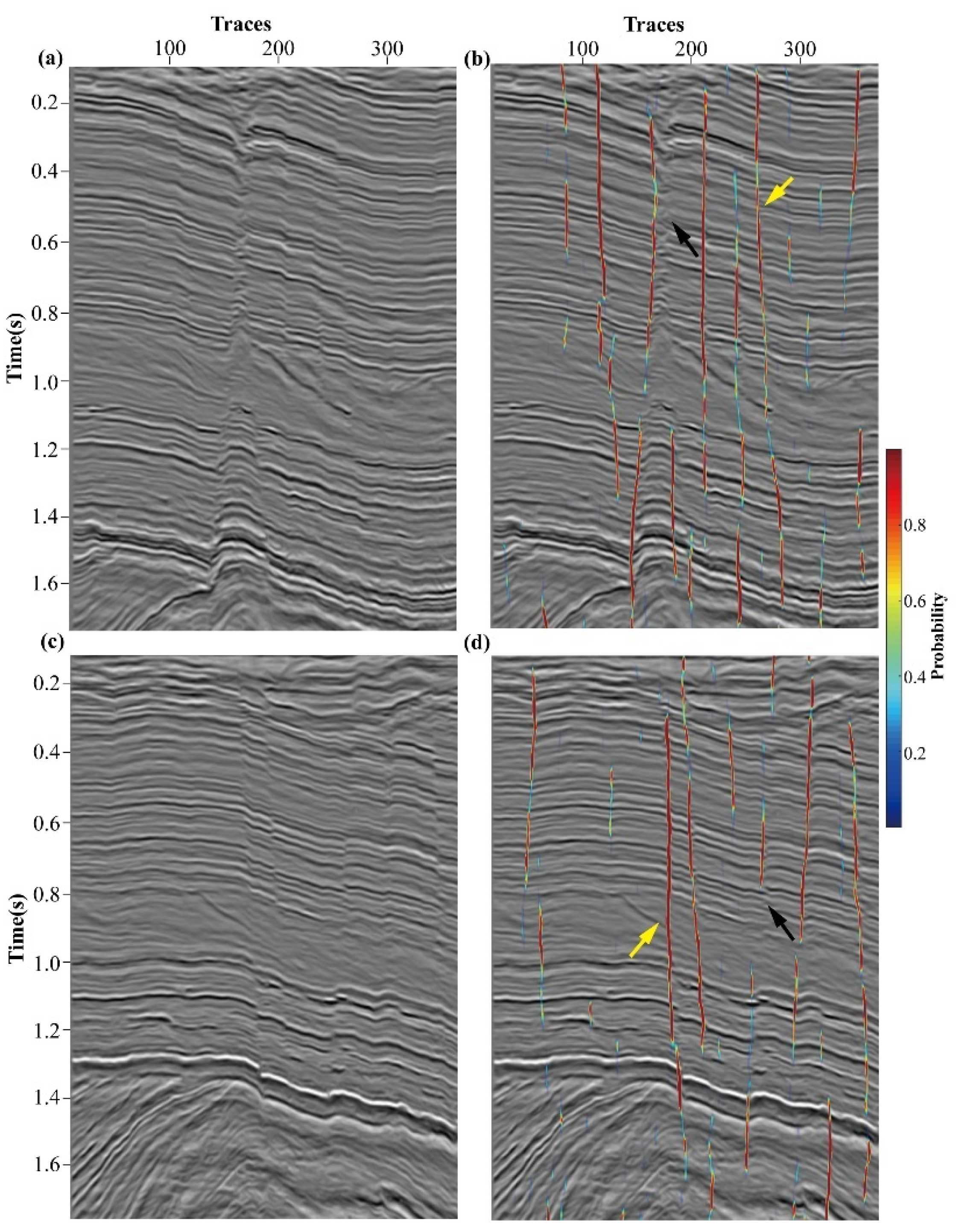
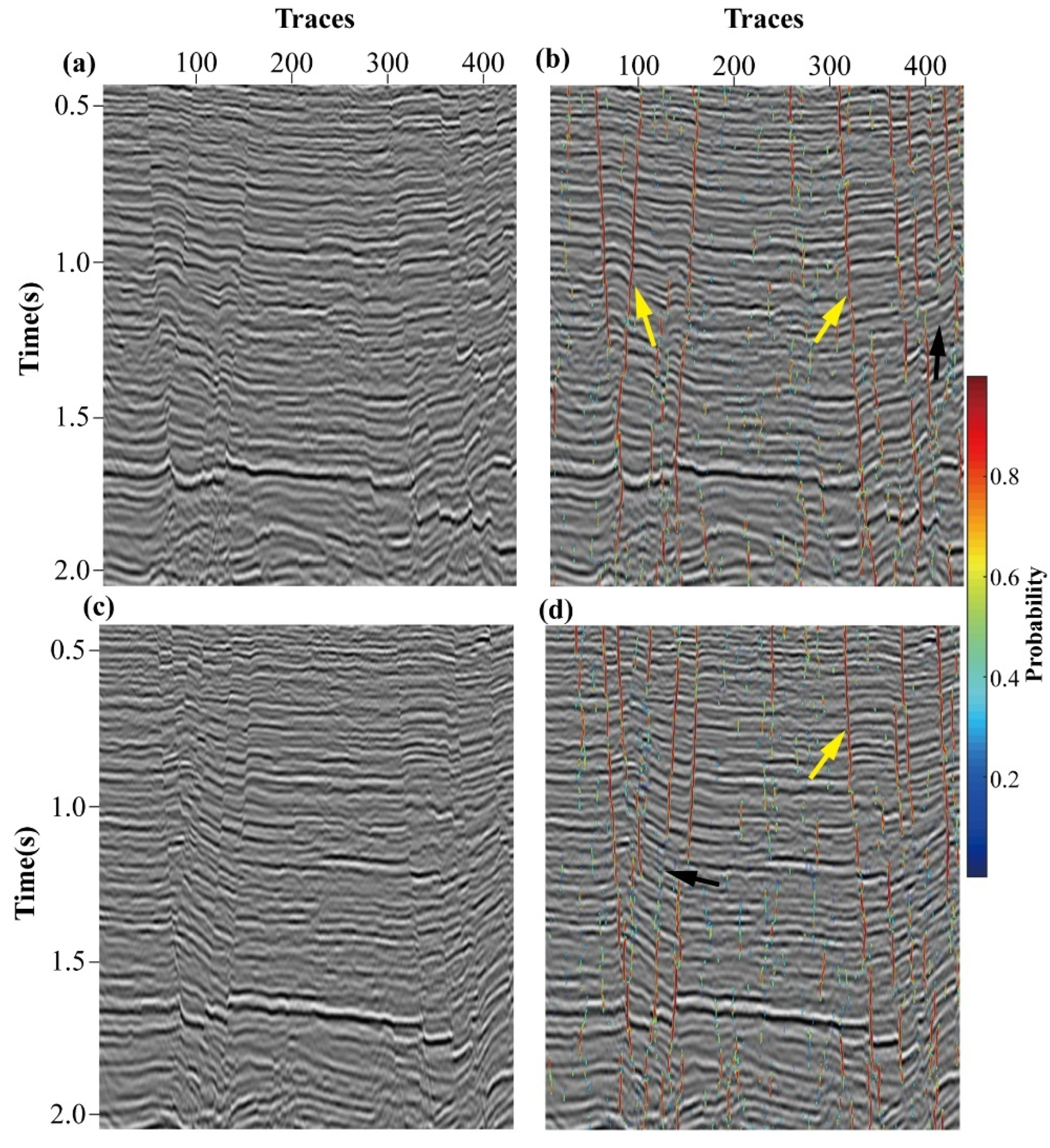
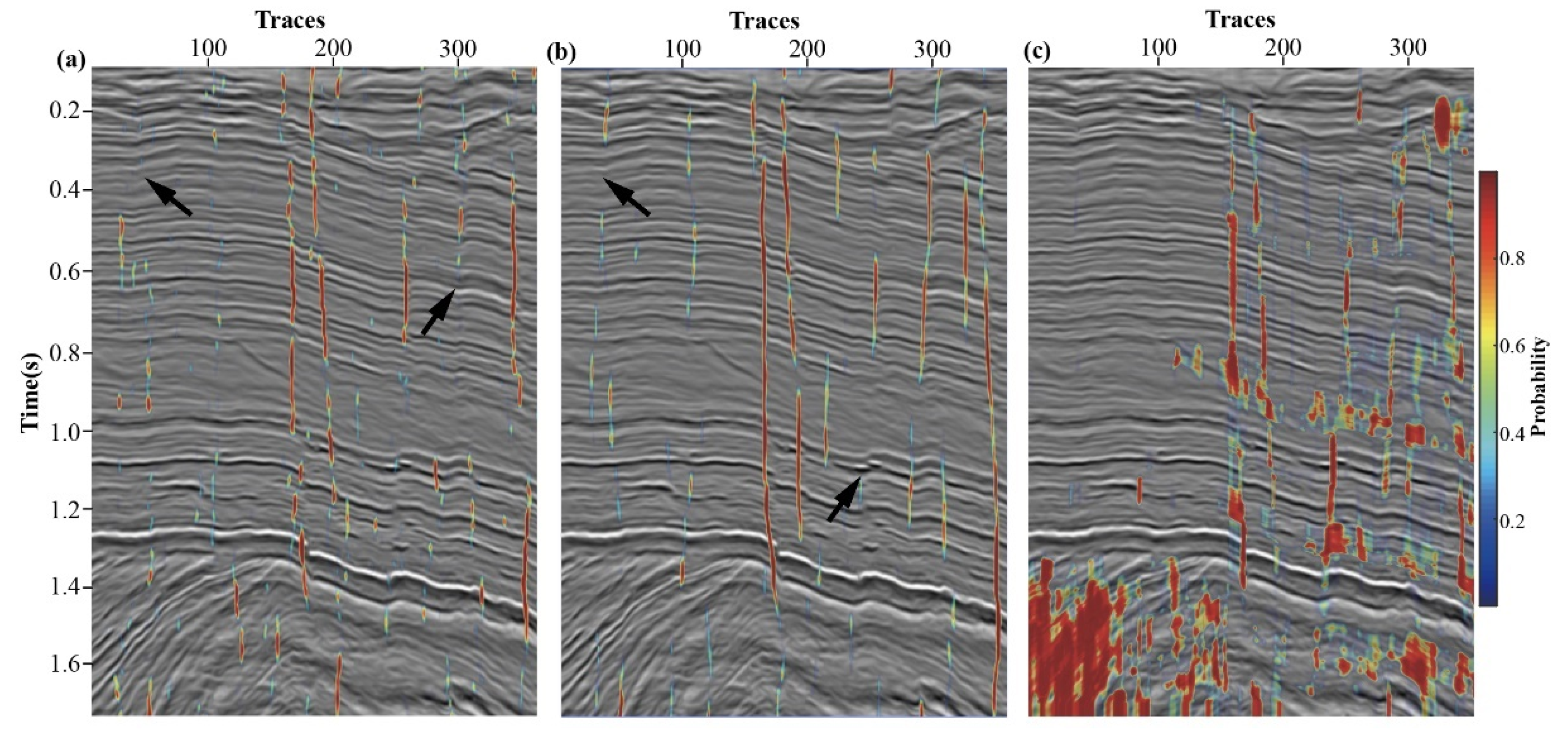
3.2. Comparison of Fault Detection Results with Different Training Samples and Seismic Coherence
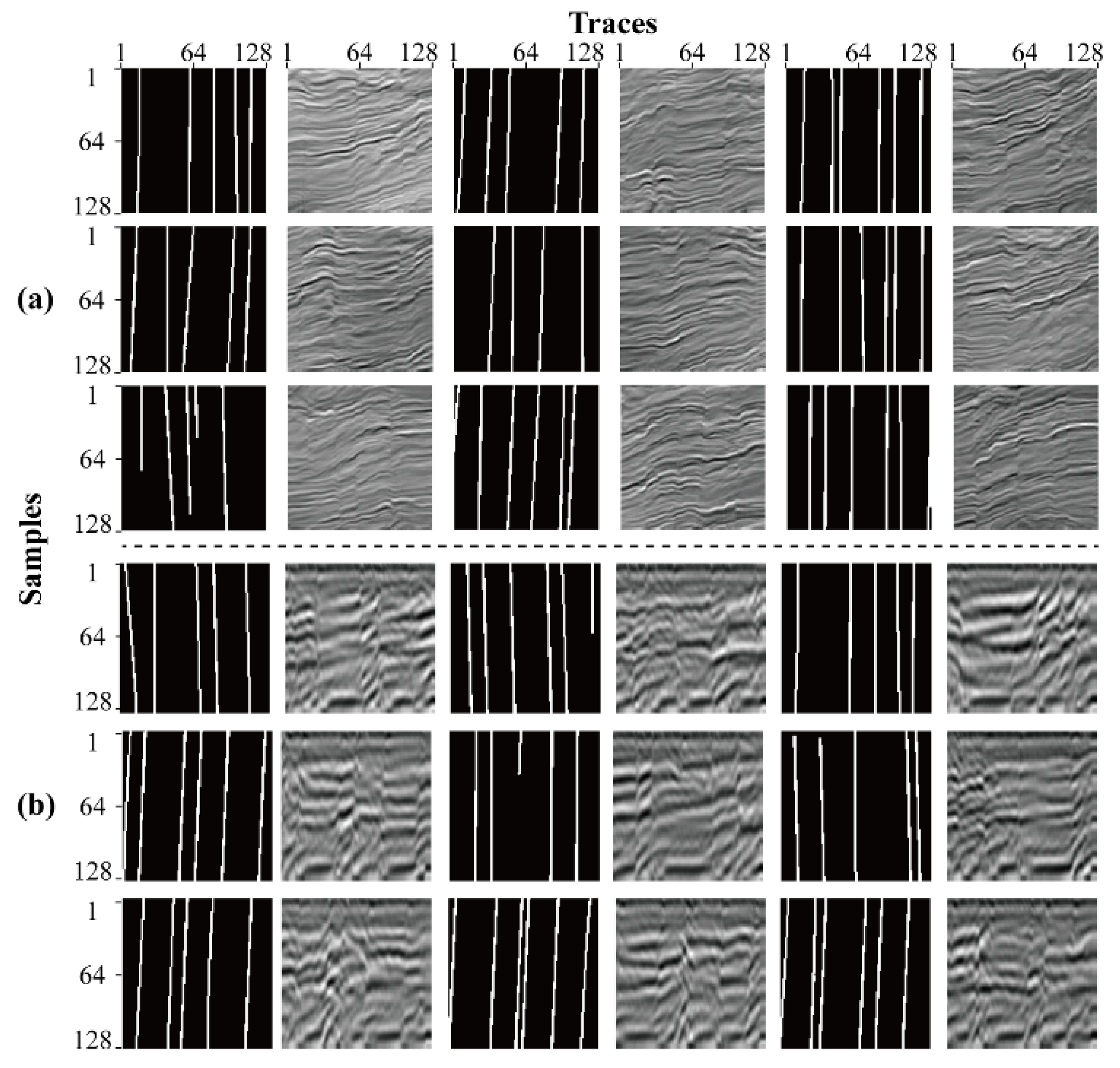
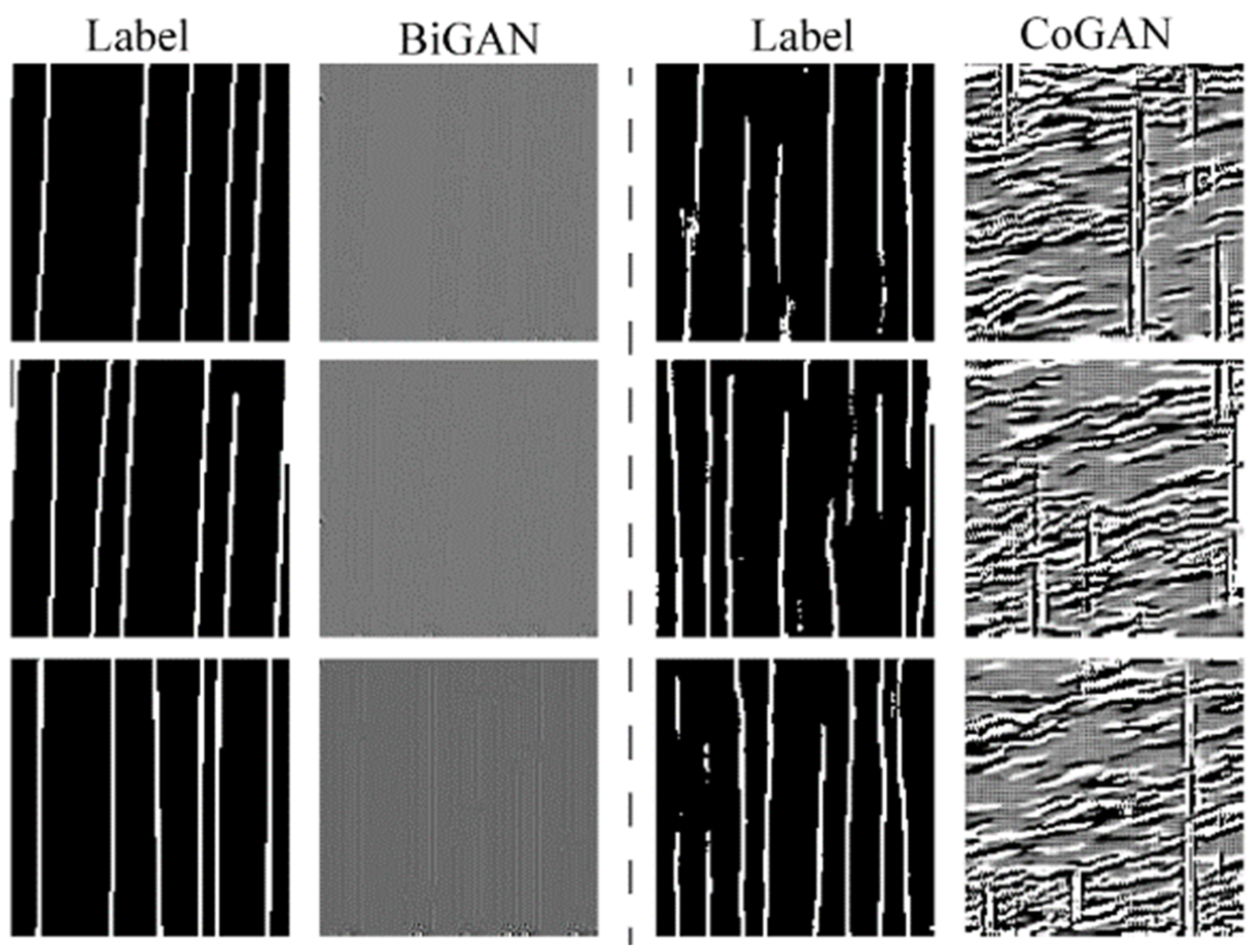
3.3. Comparison of BiGAN and CoGAN Generated Samples
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bahorich, M.; Farmer, S. 3-D seismic discontinuity for faults and stratigraphic features: The coherence cube. Lead. Edge 1995, 14, 1053–1058. [Google Scholar] [CrossRef]
- Marfurt, K.J.; Sudhaker, V.; Gersztenkorn, A.; Crawford, K.D.; Nissen, S.E. Coherency calculations in the presence of structural dip. Geophysics 1999, 64, 104–111. [Google Scholar] [CrossRef]
- Randen, T.; Monsen, E.; Signer, C.; Abrahamsen, A.; Hansen, J.O.; Sæter, T.; Schlaf, J. Three-dimensional texture attributes for seismic data analysis. In SEG Technical Program Expanded Abstracts 2000; Society of Exploration Geophysicists: Houston, TX, USA, 2000; pp. 668–671. [Google Scholar]
- Gao, D. Integrating 3D seismic curvature and curvature gradient attributes for fracture characterization: Methodologies and interpretational implications. Geophysics 2013, 78, O21–O31. [Google Scholar] [CrossRef]
- Jing, Z.; Yanqing, Z.; Zhigang, C.; Jianhua, L. Detecting boundary of salt dome in seismic data with edge-detection technique. In SEG Technical Program Expanded Abstracts 2007; Society of Exploration Geophysicists: Houston, TX, USA, 2007; pp. 1392–1396. [Google Scholar]
- Aqrawi, A.A.; Boe, T.H. Improved fault segmentation using a dip guided and modified 3D Sobel filter. In SEG Technical Program Expanded Abstracts 2011; Society of Exploration Geophysicists: Houston, TX, USA, 2011; pp. 999–1003. [Google Scholar]
- LeCun, Y.; Kavukcuoglu, K.; Farabet, C. Convolutional networks and applications in vision. In Proceedings of the 2010 IEEE International Symposium on Circuits and Systems, Paris, France, 30 May–2 June 2010; pp. 253–256. [Google Scholar]
- Zhang, Z.-D.; Alkhalifah, T. Regularized elastic full-waveform inversion using deep learning. Geophysics 2019, 84, R741–R751. [Google Scholar] [CrossRef]
- Peters, B.; Granek, J.; Haber, E. Multiresolution neural networks for tracking seismic horizons from few training images. Interpretation 2019, 7, SE201–SE213. [Google Scholar] [CrossRef]
- Wang, B.; Zhang, N.; Lu, W.; Wang, J. Deep-learning-based seismic data interpolation: A preliminary result. Geophysics 2019, 84, V11–V20. [Google Scholar] [CrossRef]
- Hu, L.; Zheng, X.; Duan, Y.; Yan, X.; Hu, Y.; Zhang, X. First-arrival picking with a U-net convolutional network. Geophysics 2019, 84, U45–U57. [Google Scholar] [CrossRef]
- Zhu, W.; Mousavi, S.M.; Beroza, G.C. Seismic signal denoising and decomposition using deep neural networks. IEEE Trans. Geosci. Remote Sens. 2019, 57, 9476–9488. [Google Scholar] [CrossRef] [Green Version]
- Dong, X.; Lin, J.; Lu, S.; Huang, X.; Wang, H.; Li, Y. Seismic shot gather denoising by using a supervised-deep-learning method with weak dependence on real noise data: A solution to the lack of real noise data. Surv. Geophys. 2022, 43, 1363–1394. [Google Scholar] [CrossRef]
- Iqbal, N. DeepSeg: Deep segmental denoising neural network for seismic data. IEEE Trans. Neural Netw. Learn. Syst. 2022. [Google Scholar] [CrossRef]
- Wu, X.; Shi, Y.; Fomel, S.; Liang, L. Convolutional neural networks for fault interpretation in seismic images. In SEG Technical Program Expanded Abstracts 2018; Society of Exploration Geophysicists: Houston, TX, USA, 2018; pp. 1946–1950. [Google Scholar]
- Zheng, Y.; Zhang, Q.; Yusifov, A.; Shi, Y. Applications of supervised deep learning for seismic interpretation and inversion. Lead. Edge 2019, 38, 526–533. [Google Scholar] [CrossRef]
- Xiong, W.; Ji, X.; Ma, Y.; Wang, Y.; AlBinHassan, N.M.; Ali, M.N.; Luo, Y. Seismic fault detection with convolutional neural network. Geophysics 2018, 83, O97–O103. [Google Scholar] [CrossRef]
- Di, H.; Shafiq, M.A.; Wang, Z.; AlRegib, G. Improving seismic fault detection by super-attribute-based classification. Interpretation 2019, 7, SE251–SE267. [Google Scholar] [CrossRef]
- Wu, X.; Liang, L.; Shi, Y.; Fomel, S. FaultSeg3D: Using synthetic data sets to train an end-to-end convolutional neural network for 3D seismic fault segmentation. Geophysics 2019, 84, IM35–IM45. [Google Scholar] [CrossRef]
- Liu, N.; He, T.; Tian, Y.; Wu, B.; Gao, J.; Xu, Z. Common-azimuth seismic data fault analysis using residual UNet. Interpretation 2020, 8, SM25–SM37. [Google Scholar] [CrossRef]
- Wu, X.; Geng, Z.; Shi, Y.; Pham, N.; Fomel, S.; Caumon, G. Building realistic structure models to train convolutional neural networks for seismic structural interpretation. Geophysics 2020, 85, WA27–WA39. [Google Scholar] [CrossRef]
- Cunha, A.; Pochet, A.; Lopes, H.; Gattass, M. Seismic fault detection in real data using transfer learning from a convolutional neural network pre-trained with synthetic seismic data. Comput. Geosci. 2020, 135, 104344. [Google Scholar] [CrossRef]
- Yan, Z.; Zhang, Z.; Liu, S. Improving performance of seismic fault detection by fine-tuning the convolutional neural network pre-trained with synthetic samples. Energies 2021, 14, 3650. [Google Scholar] [CrossRef]
- Pan, S.J.; Yang, Q. A survey on transfer learning. IEEE Trans. Knowl. Data Eng. 2009, 22, 1345–1359. [Google Scholar] [CrossRef]
- Di, H.; Li, C.; Smith, S.; Li, Z.; Abubakar, A. Imposing interpretational constraints on a seismic interpretation convolutional neural network. Geophysics 2021, 86, IM63–IM71. [Google Scholar] [CrossRef]
- Durall, R.; Tschannen, V.; Ettrich, N.; Keuper, J. Generative models for the transfer of knowledge in seismic interpretation with deep learning. Lead. Edge 2021, 40, 534–542. [Google Scholar] [CrossRef]
- Ferreira, R.S.; Noce, J.; Oliveira, D.A.; Brazil, E.V. Generating sketch-based synthetic seismic images with generative adversarial networks. IEEE Geosci. Remote Sens. Lett. 2019, 17, 1460–1464. [Google Scholar] [CrossRef]
- Li, K.; Chen, S.; Hu, G. Seismic labeled data expansion using variational autoencoders. Artif. Intell. Geosci. 2020, 1, 24–30. [Google Scholar] [CrossRef]
- Feng, Q.; Li, Y.; Wang, H. Intelligent random noise modeling by the improved variational autoencoding method and its application to data augmentation. Geophysics 2021, 86, T19–T31. [Google Scholar] [CrossRef]
- Zhu, J.-Y.; Park, T.; Isola, P.; Efros, A.A. Unpaired image-to-image translation using cycle-consistent adversarial networks. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2223–2232. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; pp. 234–241. [Google Scholar]
- Goodfellow, I.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial nets. Adv. Neural Inf. Process. Syst. 2014, 27, 139–144. [Google Scholar]
- Isola, P.; Zhu, J.-Y.; Zhou, T.; Efros, A.A. Image-to-image translation with conditional adversarial networks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, HI, USA, 21–26 July 2017; pp. 1125–1134. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 2014, arXiv:1412.6980. [Google Scholar]
- Haralick, R.M.; Shanmugam, K.; Dinstein, I.H. Textural features for image classification. IEEE Trans. Syst. Man Cybern. 1973, 6, 610–621. [Google Scholar] [CrossRef] [Green Version]
- Kruskal, J.B. Multidimensional scaling by optimizing goodness of fit to a nonmetric hypothesis. Psychometrika 1964, 29, 1–27. [Google Scholar] [CrossRef]
- Donahue, J.; Krähenbühl, P.; Darrell, T. Adversarial feature learning. arXiv 2016, arXiv:1605.09782. [Google Scholar]
- Liu, M.-Y.; Tuzel, O. Coupled generative adversarial networks. In Proceedings of the 30th International Conference on Neural Information Processing Systems, Barcelona, Spain, 5–10 December 2016; pp. 469–477. [Google Scholar]











Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, Z.; Yan, Z.; Jing, J.; Gu, H.; Li, H. Generating Paired Seismic Training Data with Cycle-Consistent Adversarial Networks. Remote Sens. 2023, 15, 265. https://doi.org/10.3390/rs15010265
Zhang Z, Yan Z, Jing J, Gu H, Li H. Generating Paired Seismic Training Data with Cycle-Consistent Adversarial Networks. Remote Sensing. 2023; 15(1):265. https://doi.org/10.3390/rs15010265
Chicago/Turabian StyleZhang, Zheng, Zhe Yan, Jiankun Jing, Hanming Gu, and Haiying Li. 2023. "Generating Paired Seismic Training Data with Cycle-Consistent Adversarial Networks" Remote Sensing 15, no. 1: 265. https://doi.org/10.3390/rs15010265