
Experimental Results of Three-Dimensional Modeling and Mapping with Airborne Ka-Band Fixed-Baseline InSAR in Typical Topographies of China


Abstract
:
1. Introduction
2. Experimental Area and System Parameters
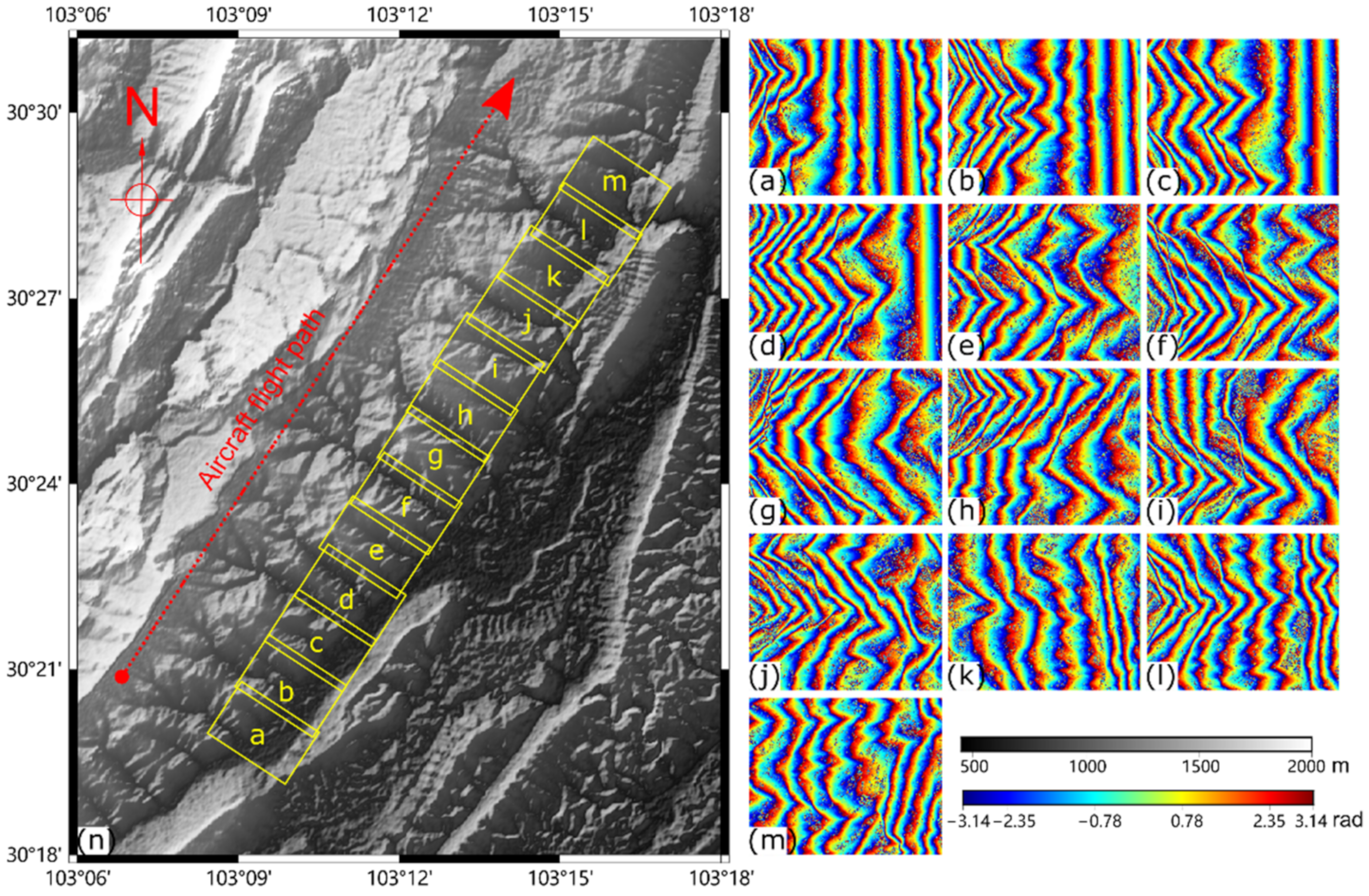
2.1. General Information of Experimental Areas
2.2. Data Acquisition in the Experimental Areas
3. Three-Dimensional Reconstruction Model
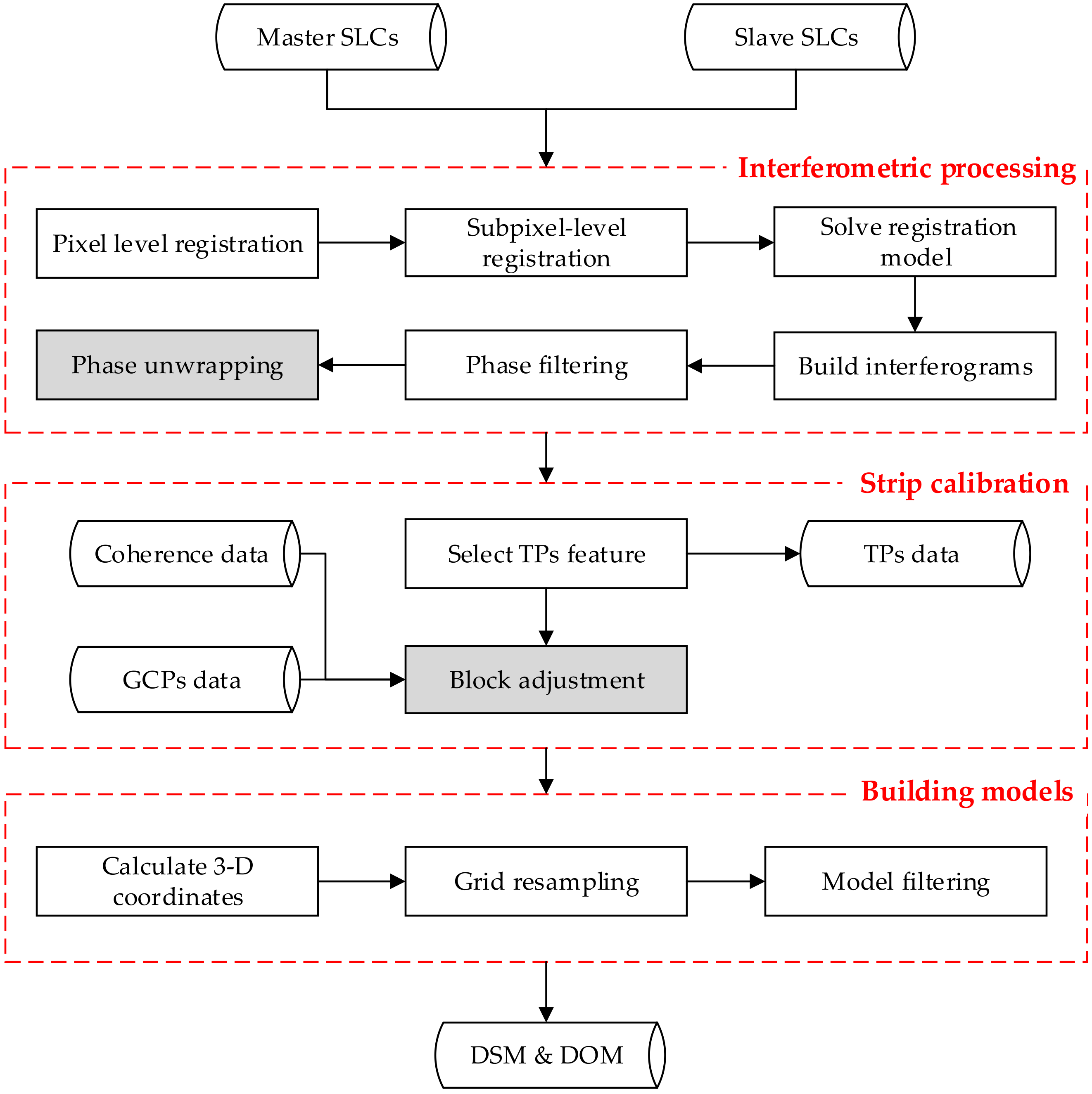
4. Processing Procedure
4.1. Interferometric Processing
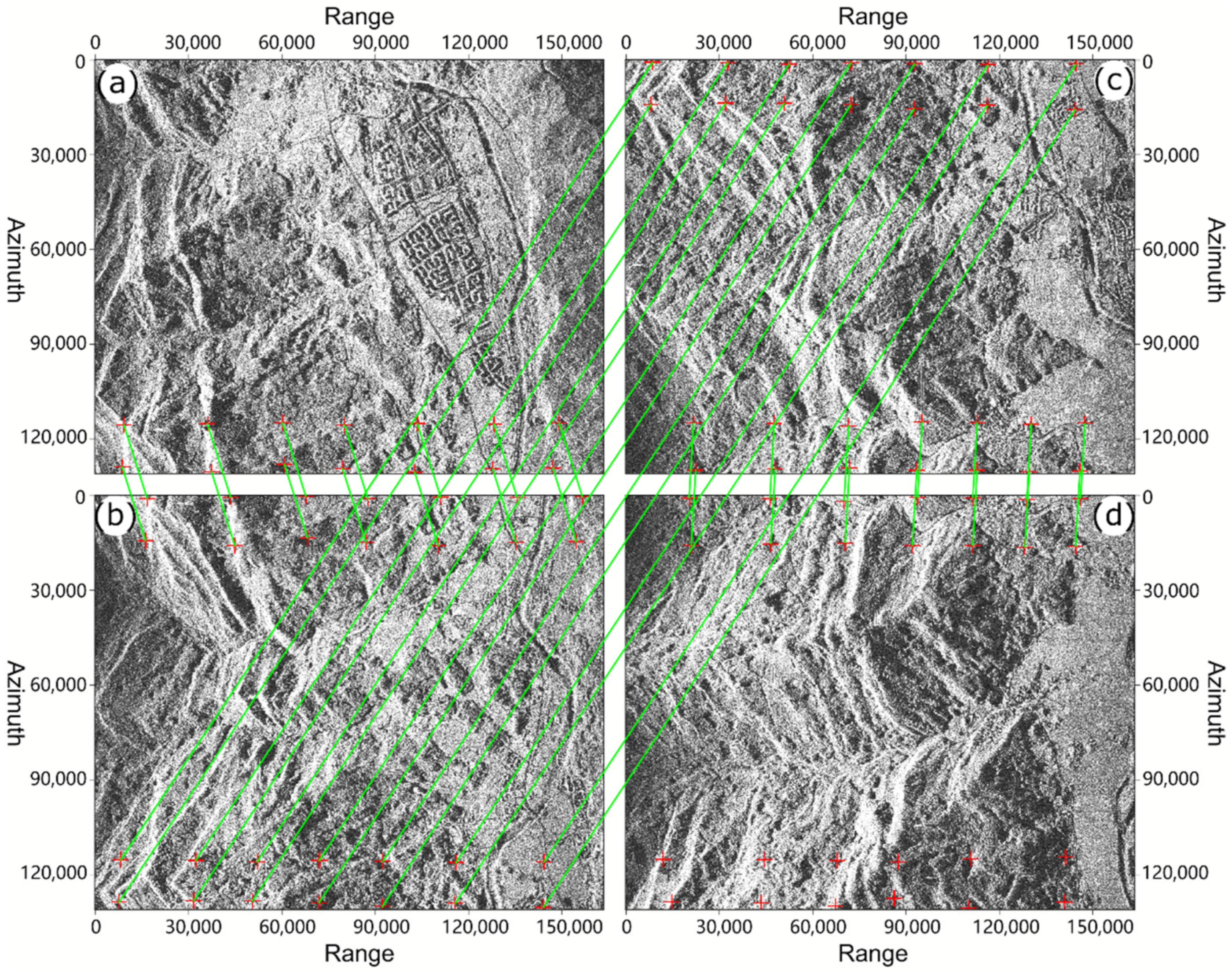
4.1.1. Registration and Generation of Interferograms
4.1.2. Interferogram Filtering
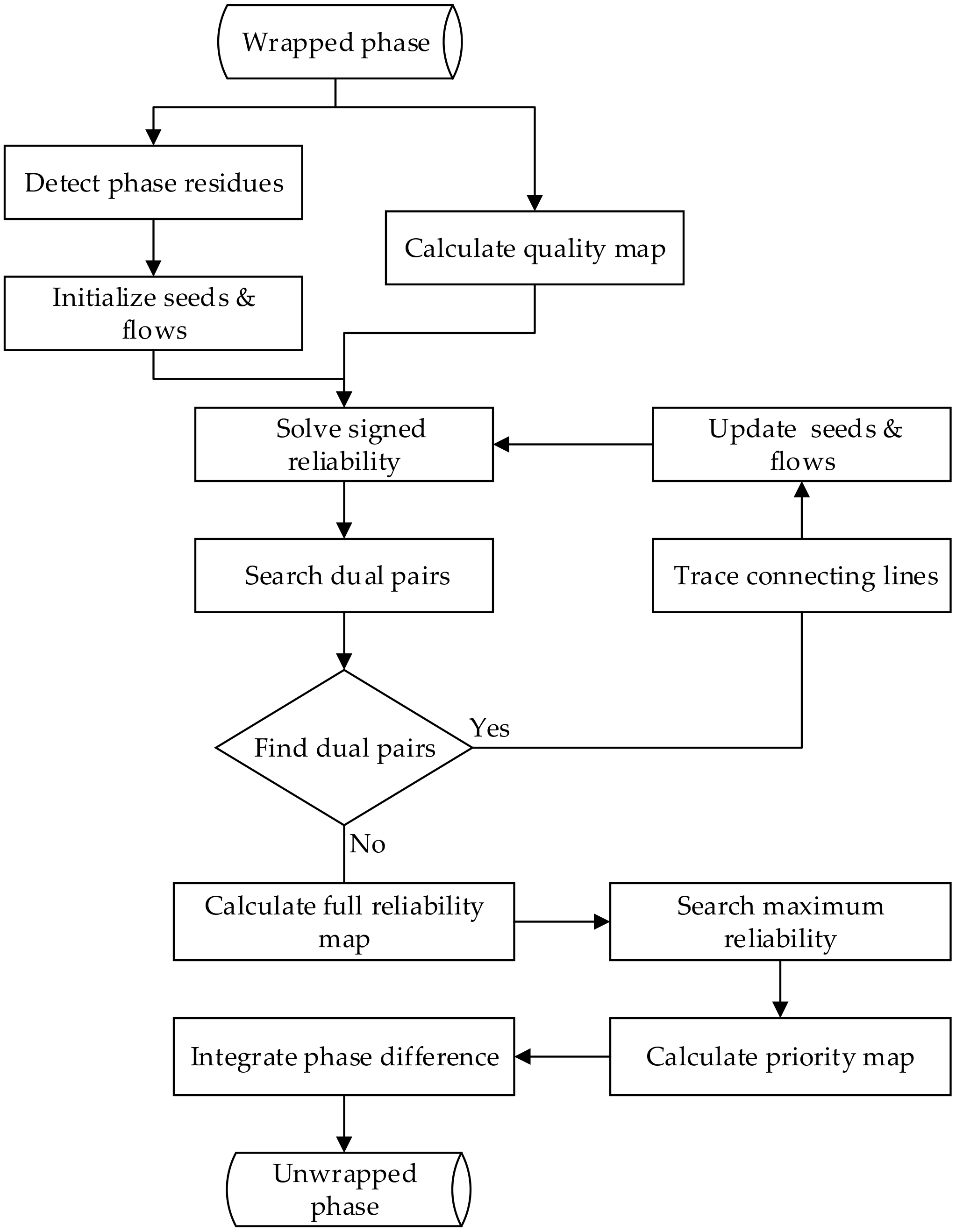
4.1.3. Unwrapping Method
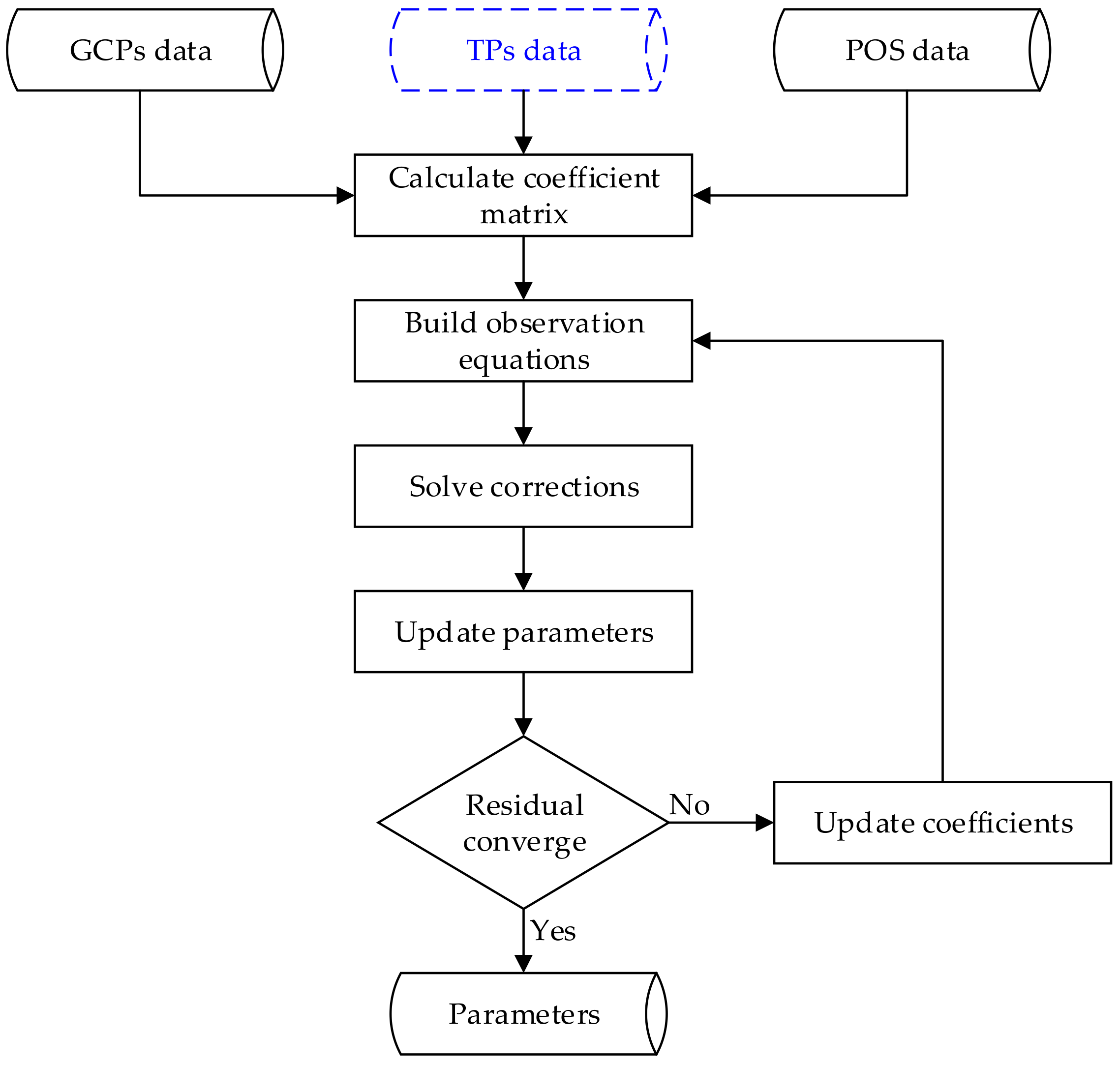
4.2. Strip Calibration
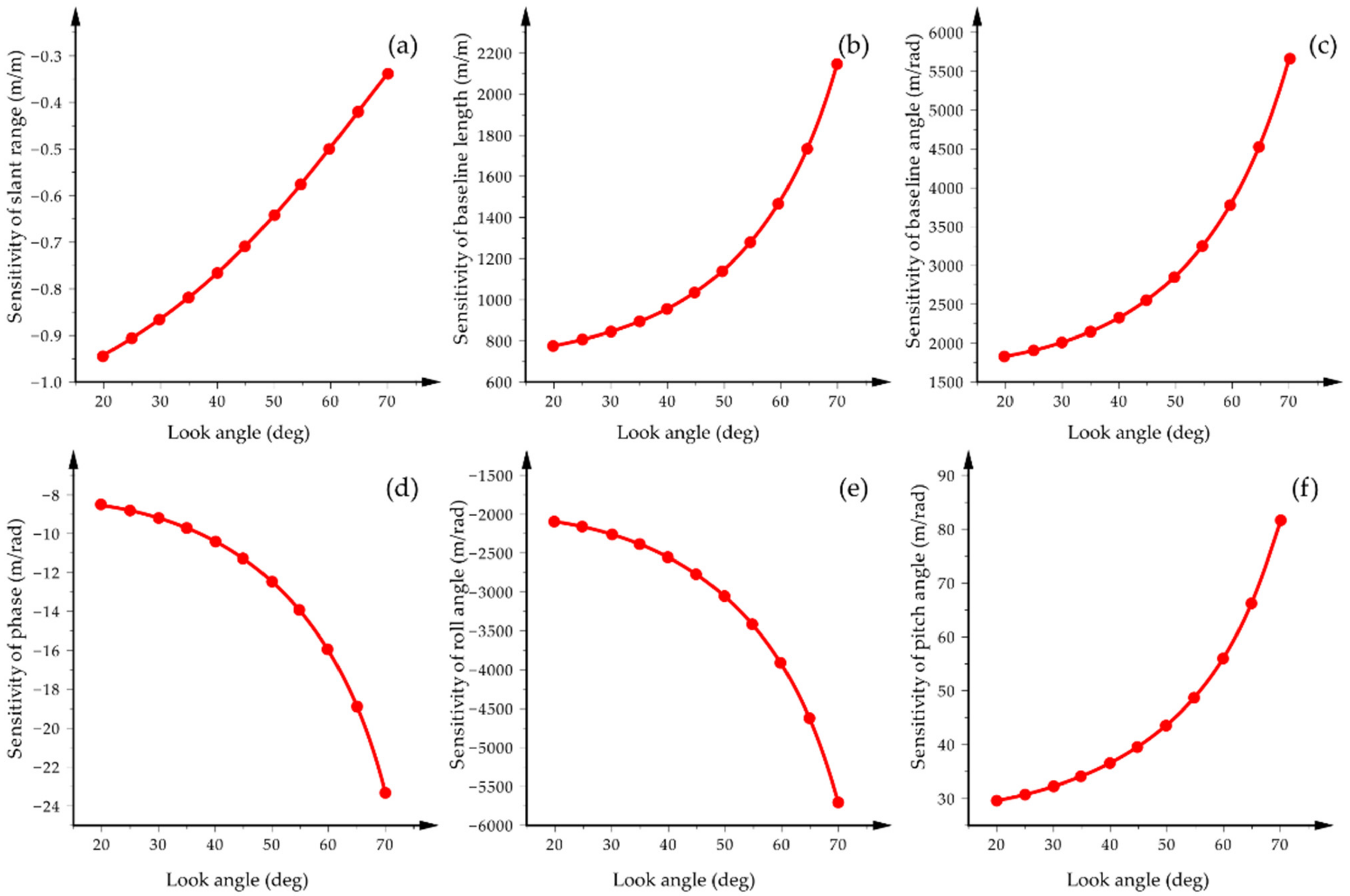
4.2.1. Error Sensitivity Analysis
4.2.2. Block Adjustment
4.3. Building Models
5. Results
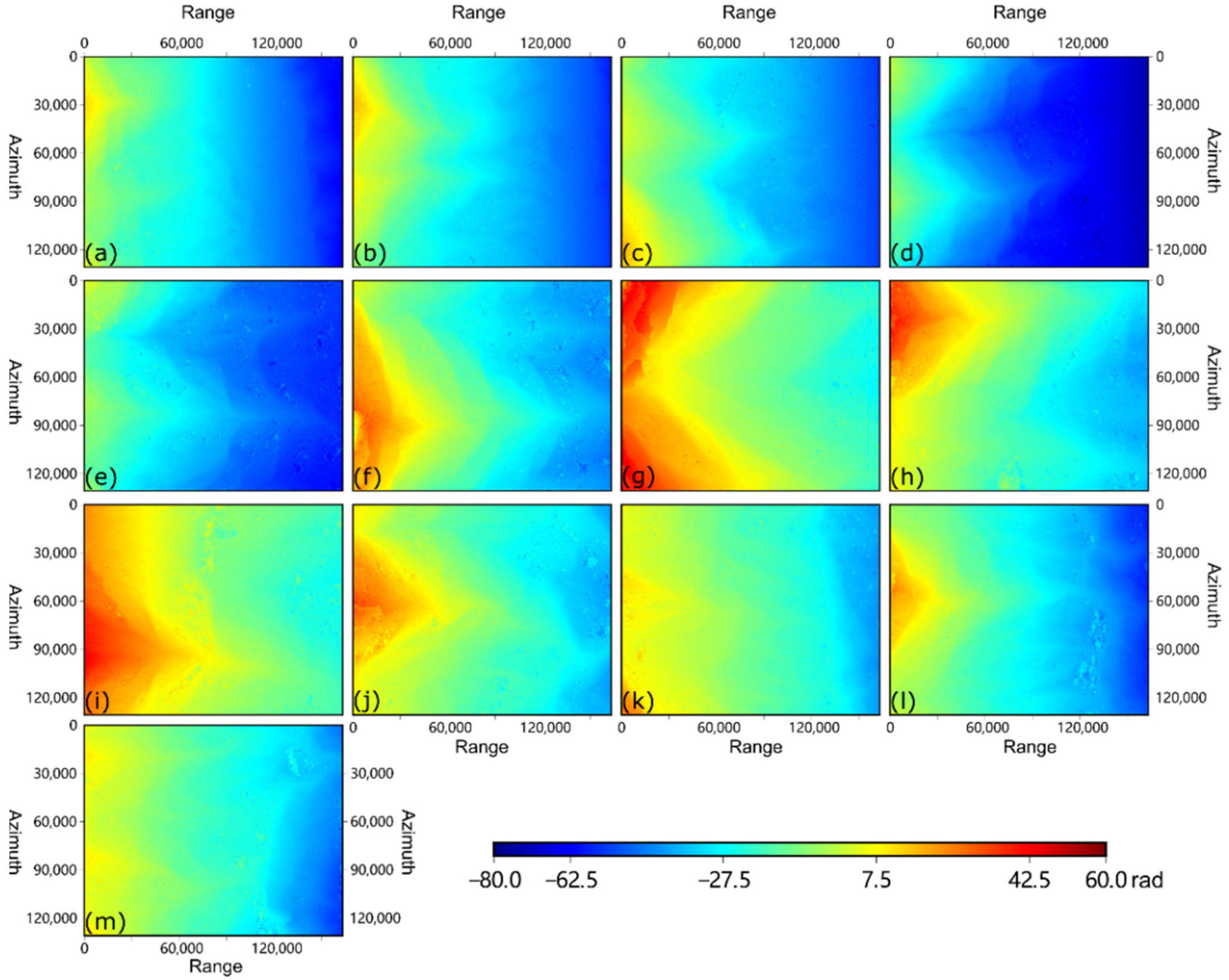
5.1. Results of Interferometric Processing
5.2. Results of Height Error Sensitivity Analysis
5.3. Results of Strip Calibration
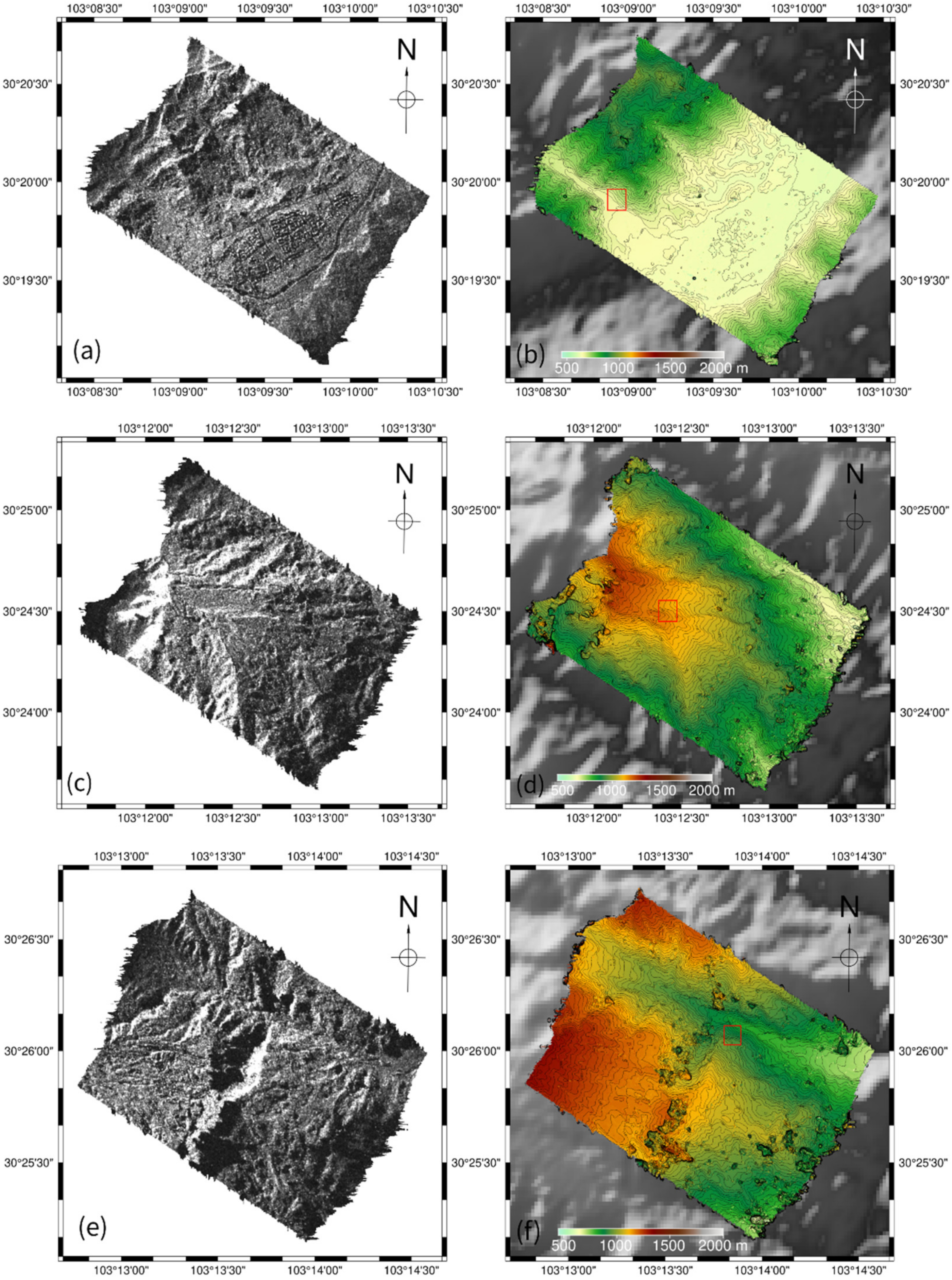
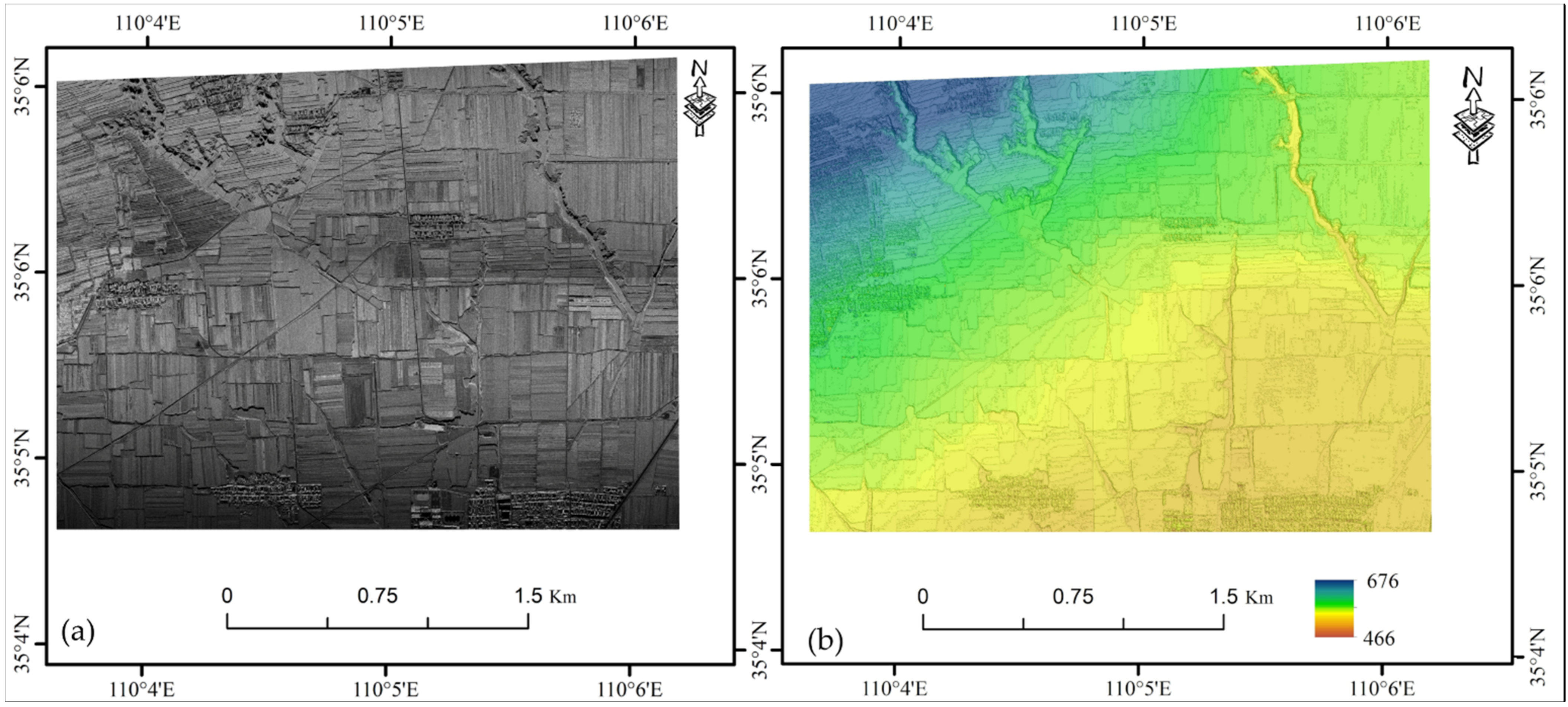
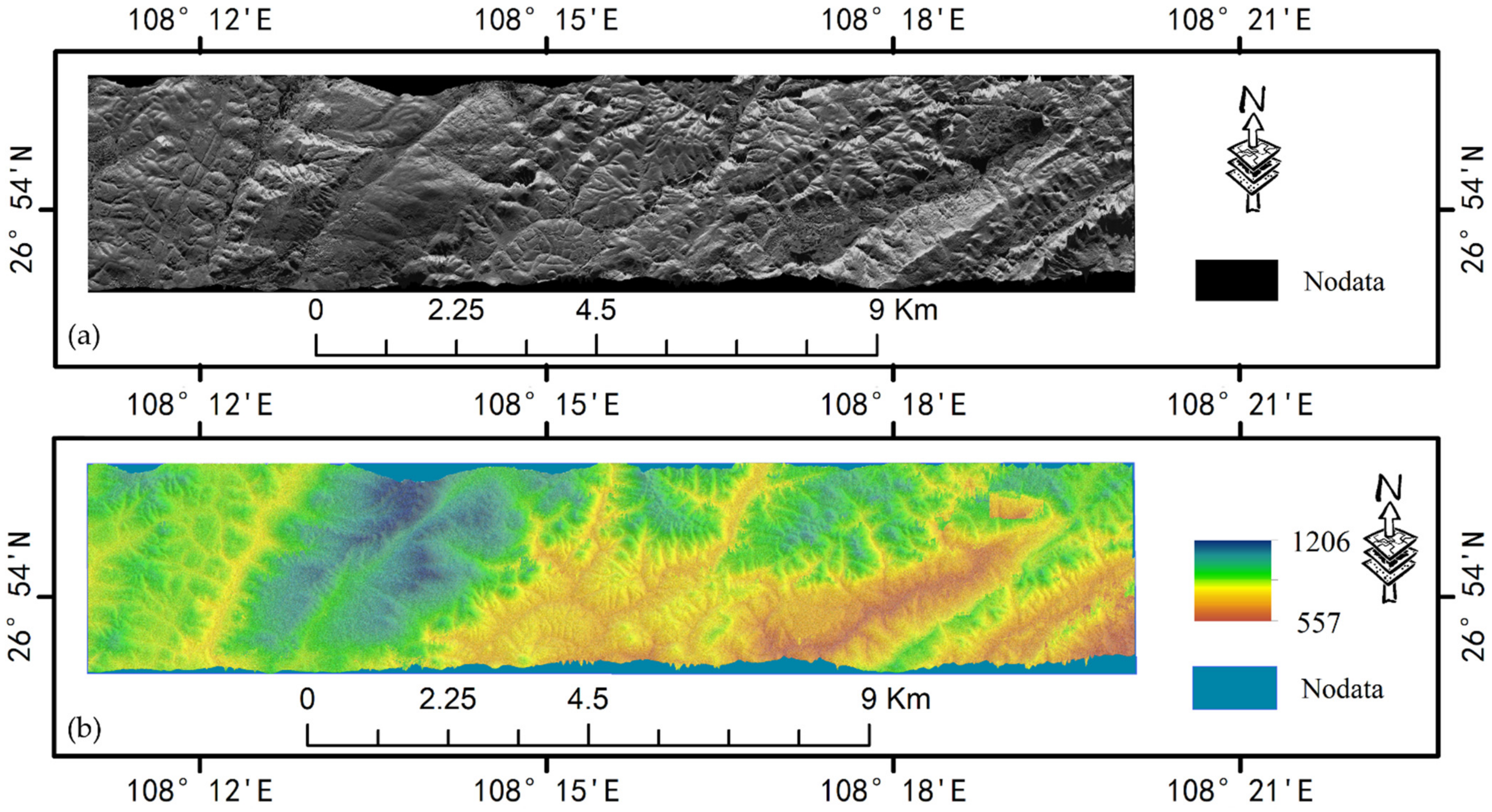
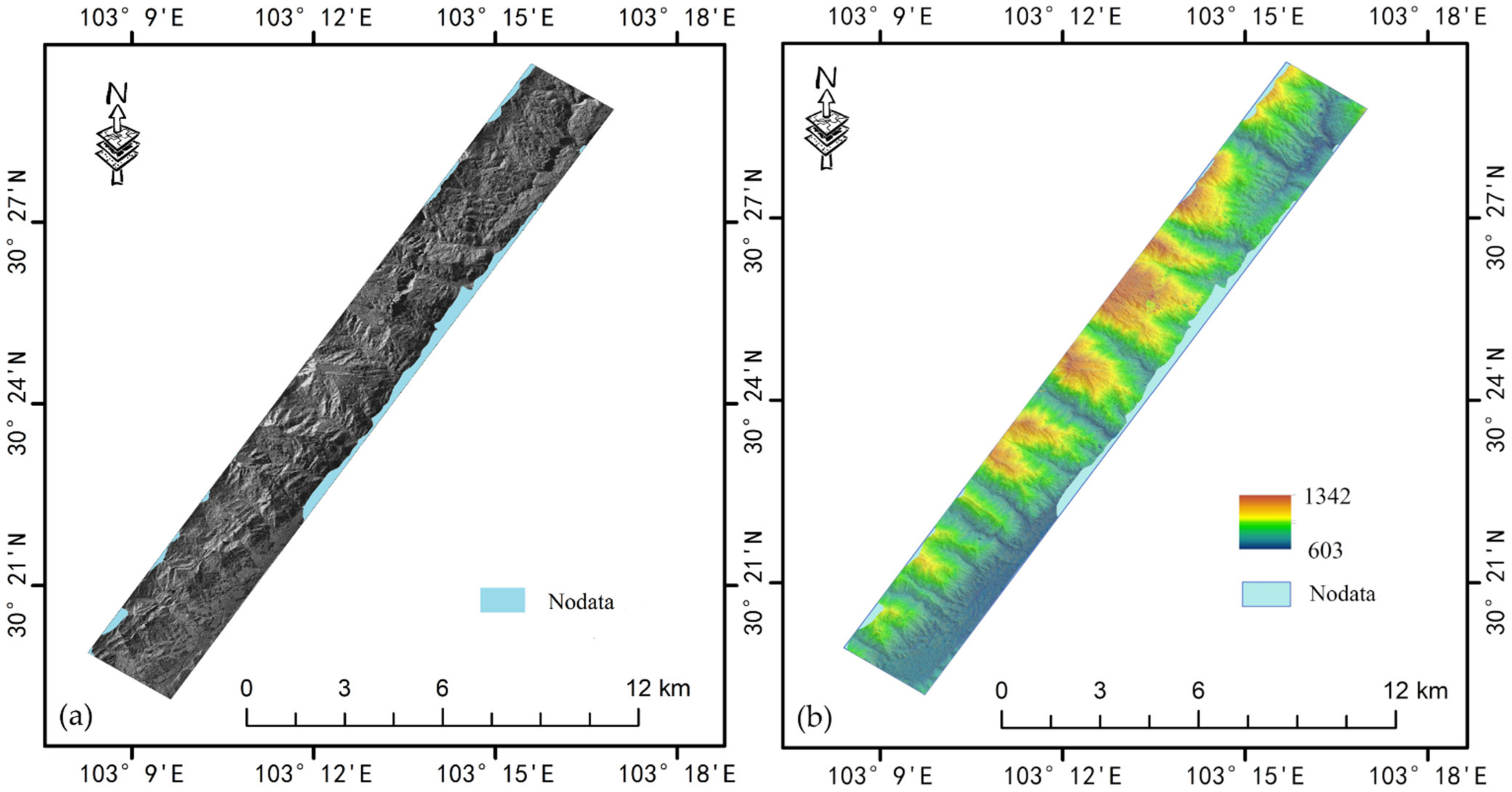
5.4. Results of the DOM and DSM
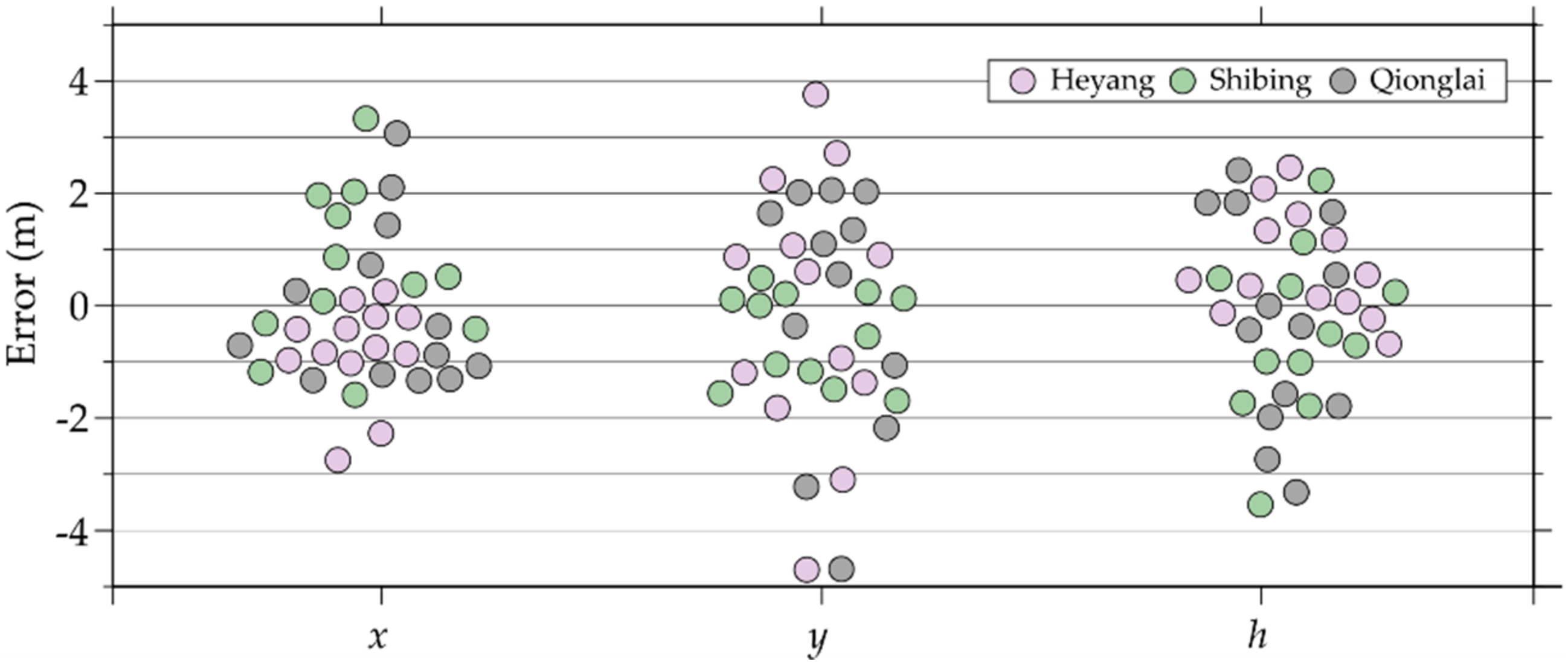
5.5. Results of Accuracy Assessment
6. Conclusions and Discussion
- The work in this paper concerns validation experiments of the airborne Ka-band InSAR system for large-scale topographic mapping and three-dimensional modeling. The airborne Ka-band InSAR has high spatial resolution and high coherence, in addition to the characteristics in full time and all weathers. The DOMs and DSMs from the experiments provide detailed and precise descriptions of topographic features.
- The whole data processing flow of airborne InSAR data is designed and implemented, including interference processing within SLC scenes, PU, global adjustment of interferometric parameters based on sparse GCPs and TPs between SLC scenes, and generation of a DSM and DOM based on the calibrated parameters. The parallel processing methods based on GPUs are applied for higher processing efficiency. The proposed data processing scheme works well in the experiments.
- The experimental areas were selected in different topographies in China, including flat (Heyang) and mountainous (Shibing and Qionglai) areas. The airborne InSAR system can complete data acquisition in the topographies, and the generated DOMs and DSMs are qualified. That verifies the high feasibility of the airborne Ka-band InSAR system for topographic mapping and three-dimensional modeling in different topographies.
- The error indexes of obtained DSMs and DOMs in the experiments meet the accuracy requirements for scale 1:5000 in typical topographies according to the result analysis. It proves the feasibility of topographic mapping and modeling with the airborne Ka-band InSAR system for large-scale DSM and DOM projects.
- The width of the SAR strips from the airborne InSAR system is near 3 km, which may be suitable for modeling in a single frame. However, large-scale topographic mapping tasks, which involve larger areas, will require more strip splicing, and the need for accuracy control would be more prominent. We need to find a resolution for strip processing in large areas.
- Due to the shadow and layover limitations in mountainous areas, a proper interpolation method or antiparallel flight to fill in non-data areas is required.
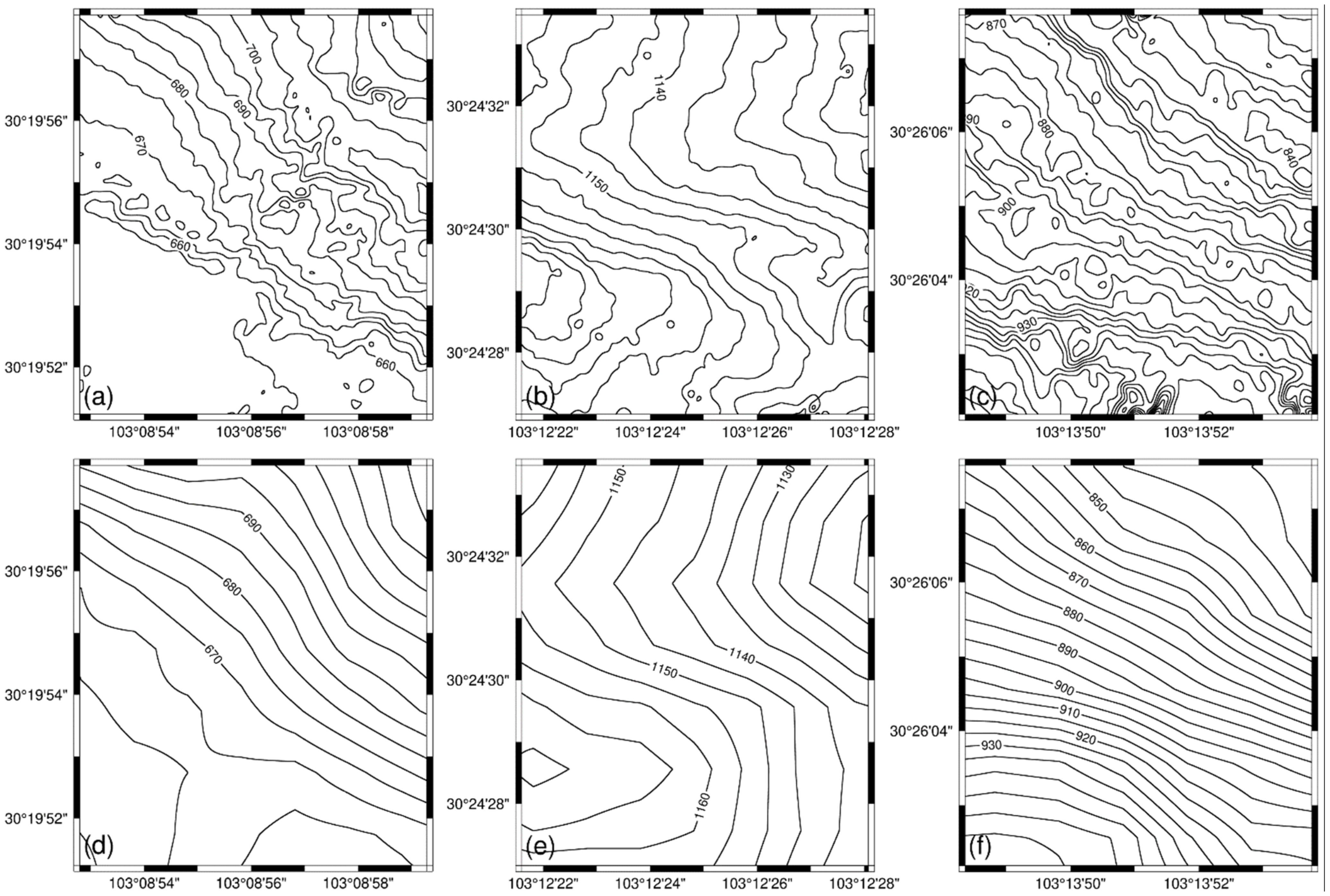
- To remove the corresponding gross error and obtain the corresponding DEM of the experimental area, we need an appropriate filtering algorithm to filter the generated DSM.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, Z.; Guo, H.; Li, X. Error analysis of high-precision DEM generated from airborne dual-antenna interferometric SAR data. Chin. High Technol. Lett. 2012, 22, 171–179. [Google Scholar] [CrossRef]
- Sun, Z.; Guo, H.; Li, X.; Yue, X.; Huang, Q. DEM generation and error analysis using the first Chinese airborne dual-antenna interferometric SAR data. Int. J. Remote Sens. 2011, 32, 8485–8504. [Google Scholar] [CrossRef]
- Small, D.; Pasquali, P.; Holecz, F.; Meier, E.; Nuesch, D. Experiences with Multiresolution and Multifrequency InSAR Height Model Generation. In Proceedings of the 1998 IEEE International Geoscience and Remote Sensing Symposium, Seattle, DC, USA, 6–10 July 1998. [Google Scholar] [CrossRef]
- Zebker, H.A.; Goldstein, R.M. Topographic mapping from interferometric synthetic aperture radar observations. J. Geophys. Res. 1986, 91, 4993–4999. [Google Scholar] [CrossRef]
- Chen, L.; Xiao, H.; Wang, H.; Lin, Y. Research Development of High Precision Real-Time Airborne InSAR System. J. Comput. 2011, 9, 189–195. [Google Scholar] [CrossRef]
- Mercer, B. DEMs created from airborne IFSAR—An update. Int. Arch. Photogramm. Remote Sens. 2004, 35, 841–848. [Google Scholar]
- Xiang, M.; Wu, Y.; Li, S.; Wei, L. Introduction on an Experimental Airborne InSAR System. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, Seoul, Korea, 29 July 2005. [Google Scholar] [CrossRef]
- Mercer, B. National and regional scale DEMs created from airborne INSAR. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2007, 36, 113–117. [Google Scholar]
- Nuri, A.N. Mapping of Large Areas in Tropical Countries by Using High Resolution Airborne Interferometric Radar. Int. Arch. Photogramm. Remote Sens. 2000, 34, 19–23. [Google Scholar]
- Li, D.; Liu, B.; Pan, Z. Airborne MMW InSAR Interferometry with Cross-Track Three-Baseline Antennas. In Proceedings of the 9th European Conference on Synthetic Aperture Radar, Nuremberg, Germany, 23–26 April 2012; pp. 301–303. [Google Scholar]
- Cui, X.; Yao, Z.; Zengliang, Z.; Wang, M.; Fan, C.; Su, T. Comparison of Liquid Water Content Retrievals for Airborne Millimeter-Wave Radar with Different Particle Parameter Schemes. J. Trop. Meteorol. 2020, 26, 188–198. [Google Scholar]
- Moller, D.; Andreadis, K.M.; Bormann, K.J.; Hensley, S.; Painter, T.H. Mapping Snow Depth from Ka-Band Interferometry: Proof of Concept and Comparison with Scanning Lidar Retrievals. IEEE Geosci. Remote Sens. Lett. 2017, 14, 886–890. [Google Scholar] [CrossRef]
- Wang, J.; Song, Q.; Jiang, Z.; Zhou, Z. A Novel InSAR Based Off-Road Positive and Negative Obstacle Detection Technique for Unmanned Ground Vehicle. In Proceedings of the 2016 IEEE International Geoscience and Remote Sensing Symposium, Beijing, China, 10–15 July 2016. [Google Scholar] [CrossRef]
- Scannapieco, A.F.; Renga, A.; Moccia, A. Compact Millimeter Wave FMCW InSAR for UAS Indoor Navigation. In Proceedings of the 2015 IEEE Metrology for Aerospace, Benevento, Italy, 4–5 June 2015. [Google Scholar] [CrossRef]
- Petrov, V.; Gapeyenko, M.; Moltchanov, D. Hover or Perch: Comparing Capacity of Airborne and Landed Millimeter-Wave UAV Cells. IEEE Wirel. Commun. Lett. 2020, 9, 2059–2063. [Google Scholar] [CrossRef]
- Zhang, Q.; Zhang, L.; Guo, J. Development of Ka-band miniature synthetic aperture radar based on UAV. J. Geo-Inf. Sci. 2019, 21, 524–531. [Google Scholar] [CrossRef]
- Shi, J.; Ma, L.; Wei, S. Ka-band InSAR imaging and analysis based on IMU data. J. Radars 2014, 3, 19–27. [Google Scholar] [CrossRef]
- Li, Y.; Xiang, M.; Lü, X.; Wei, L. Joint interferometric calibration based on block adjustment for an airborne dual-antenna InSAR system. Int. J. Remote Sens. 2014, 35, 6444–6468. [Google Scholar] [CrossRef]
- Madsen, S.N.; Zebker, H.A.; Martin, J. Topographic mapping using radar interferometry: Processing techniques. IEEE Trans. Geosci. Remote Sens. 1993, 31, 246–256. [Google Scholar] [CrossRef]
- Dengrong, Z.; Le, Y. A High-Precision Co-registration Method for InSAR Image Processing. J. Remote Sens. 2007, 11, 563–567. [Google Scholar] [CrossRef]
- Li, T.; Zhong, X.; Wu, T.; Zhang, J.; Shen, M.; Qu, S. DEM Generation with High-Resolution Repeat-Pass Interferometry for Airborne Squinted SAR Acquisitions. In Proceedings of the 6th Asia-Pacific Conference on Synthetic Aperture Radar, Xiamen, China, 26–29 November 2019. [Google Scholar] [CrossRef]
- Sun, Z.; Guo, H.; Jiao, M. The automatic registration of airborne dual-antenna interferometric SAR complex images. Remote Sens. Land Resour. 2010, 1, 24–29. [Google Scholar] [CrossRef]
- Zhang, B.; Hu, Q.; Wei, L. Improved morphological filtering algorithm of interferograms. Syst. Eng. Electron. 2018, 40, 2230–2236. [Google Scholar] [CrossRef]
- Ambrosino, R.; Baselice, F.; Ferraioli, G.; Schirinzi, G. Extended Kalman Filter for Multichannel InSAR Height Reconstruction. IEEE Trans. Geosci. Remote Sens. 2017, 55, 5854–5863. [Google Scholar] [CrossRef]
- Goldstein, R.M.; Werner, C.L. Radar interferogram filtering for geophysical applications. Geophys. Res. Lett. 1998, 25, 4035–4038. [Google Scholar] [CrossRef] [Green Version]
- Gao, J.; Sun, Z. Phase unwrapping method based on parallel local minimum reliability dual expanding for large-scale data. J. Appl. Remote. Sens. 2019, 13, 038506. [Google Scholar] [CrossRef] [Green Version]
- Gao, J. Reliability-Map-Guided Phase Unwrapping Method. IEEE Geosci. Remote Sens. Lett. 2016, 13, 716–720. [Google Scholar] [CrossRef]
- Ghiglia, D.C.; Pritt, M.D. Two-Dimensional Phase Unwrapping: Theory, Algorithms, and Software; Wiley-Interscience: New York, NY, USA, 1998; pp. 70–82. [Google Scholar]
- Schwind, P.; Suri, S.; Reinartz, P.; Siebert, A. Applicability of the SIFT operator to geometric SAR image registration. Int. J. Remote Sens. 2010, 31, 1959–1980. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Jin, G.; Xiong, X.; Xu, Q.; Gong, Z.; Zhou, Y. Baseline Estimation Algorithm with Block Adjustment for Multi-Pass Dual-Antenna Insar. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B7, 39–45. [Google Scholar] [CrossRef] [Green Version]
- Yue, X.; Han, C.; Dou, C.; Zhao, Y. Research on Block Adjustment of Airborne InSAR Images. IOP Conf. Ser. Earth Environ. Sci. 2014, 17, 12199. [Google Scholar]
- Zang, W.; Xiang, M.; Wu, Y. Realization of outside calibration method based on the sensitivity equation for dual-antenna airborne interferometric SAR. Remote Sens. Technol. Appl. 2009, 24, 82–87. [Google Scholar]
- Liao, T.; Wei, L.; Huang, J. Airborne Millimeter-Wave InSAR Applied to the Analysis of the Mapping Accuracy of Complex Mountainous Areas. Sci. Technol. Innov. Her. 2018, 18, 46–47. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Heyang | Shibing | Qionglai |
|---|---|---|---|
| Band | Ka | Ka | Ka |
| Wavelength/m | 0.008 | 0.008 | 0.008 |
| Frequency/GHz | 35 | 35 | 35 |
| Chirp bandwidth/MHz | 900 | 900 | 900 |
| Interferometric mode | 1 | 1 | 1 |
| Baseline/m | 0.313 | 0.313 | 0.313 |
| Azimuth row | 14,224 | 17,136 | 13,120 |
| Range column | 8192 | 8704 | 16,384 |
| Initial slant distance/m | 3599 | 3989 | 4618 |
| Carrier height/m | 3435 | 4043 | 4183 |
| Positioning accuracy (H)/m | 0.03 | 0.03 | 0.03 |
| Positioning accuracy (V)/m | 0.06 | 0.06 | 0.06 |
| Roll accuracy/deg | 0.0025 | 0.0025 | 0.0025 |
| Pitch accuracy/deg | 0.0025 | 0.0025 | 0.0025 |
| Azimuth resolution/m | 0.123 | 0.152 | 0.142 |
| Range resolution/m | 0.134 | 0.134 | 0.134 |
| Iteration | b (m) | α (rad) | φo (rad) |
|---|---|---|---|
| 0 | 0.313000 | 0.912372 | 32.5086 |
| 1 | 0.314680 | 0.848153 | 17.8841 |
| 2 | 0.315350 | 0.847576 | 17.6513 |
| 3 | 0.315352 | 0.847562 | 17.6477 |
| 4 | 0.315352 | 0.847563 | 17.6478 |
| 5 | 0.315352 | 0.847563 | 17.6478 |
| 6 | 0.315352 | 0.847563 | 17.6479 |
| 7 | 0.315352 | 0.847562 | 17.6477 |
| 8 | 0.315352 | 0.847563 | 17.6479 |
| 9 | 0.315352 | 0.847563 | 17.6478 |
| 10 | 0.315352 | 0.847563 | 17.6478 |
| Scene | b (m) | α (rad) | φo (rad) |
|---|---|---|---|
| b | 0.31449 | 0.912298 | 32.5846 |
| c | 0.31430 | 0.912200 | 32.6022 |
| d | 0.31388 | 0.912538 | 51.4157 |
| e | 0.31394 | 0.911728 | 39.1988 |
| f | 0.31392 | 0.911308 | 20.3440 |
| g | 0.31404 | 0.911853 | 0.9472 |
| h | 0.31507 | 0.911262 | 13.7681 |
| i | 0.31453 | 0.911440 | 1.1327 |
| j | 0.31260 | 0.911610 | 13.7511 |
| k | 0.31322 | 0.911293 | 13.9237 |
| l | 0.31269 | 0.911433 | 26.3863 |
| m | 0.31407 | 0.911785 | 20.1145 |
| Index | Direction | Heyang | Shibing | Qionglai |
|---|---|---|---|---|
| RSME | x | 1.224 | 1.490 | 1.410 |
| y | 2.120 | 0.938 | 2.156 | |
| h | 1.150 | 1.433 | 1.846 | |
| MAE | x | 0.926 | 1.175 | 1.216 |
| y | 1.851 | 0.720 | 1.858 | |
| h | 0.876 | 1.073 | 1.580 | |
| SD | x | 0.866 | 1.369 | 1.409 |
| y | 2.543 | 0.771 | 2.154 | |
| h | 1.790 | 1.393 | 1.820 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gao, J.; Sun, Z.; Guo, H.; Wei, L.; Li, Y.; Xing, Q. Experimental Results of Three-Dimensional Modeling and Mapping with Airborne Ka-Band Fixed-Baseline InSAR in Typical Topographies of China. Remote Sens. 2022, 14, 1355. https://doi.org/10.3390/rs14061355
Gao J, Sun Z, Guo H, Wei L, Li Y, Xing Q. Experimental Results of Three-Dimensional Modeling and Mapping with Airborne Ka-Band Fixed-Baseline InSAR in Typical Topographies of China. Remote Sensing. 2022; 14(6):1355. https://doi.org/10.3390/rs14061355
Chicago/Turabian StyleGao, Jian, Zhongchang Sun, Huadong Guo, Lideng Wei, Yongjie Li, and Qiang Xing. 2022. "Experimental Results of Three-Dimensional Modeling and Mapping with Airborne Ka-Band Fixed-Baseline InSAR in Typical Topographies of China" Remote Sensing 14, no. 6: 1355. https://doi.org/10.3390/rs14061355