
Water Quality Chl-a Inversion Based on Spatio-Temporal Fusion and Convolutional Neural Network



Abstract
:1. Introduction
2. Data and Methods
2.1. Research Areas and Data
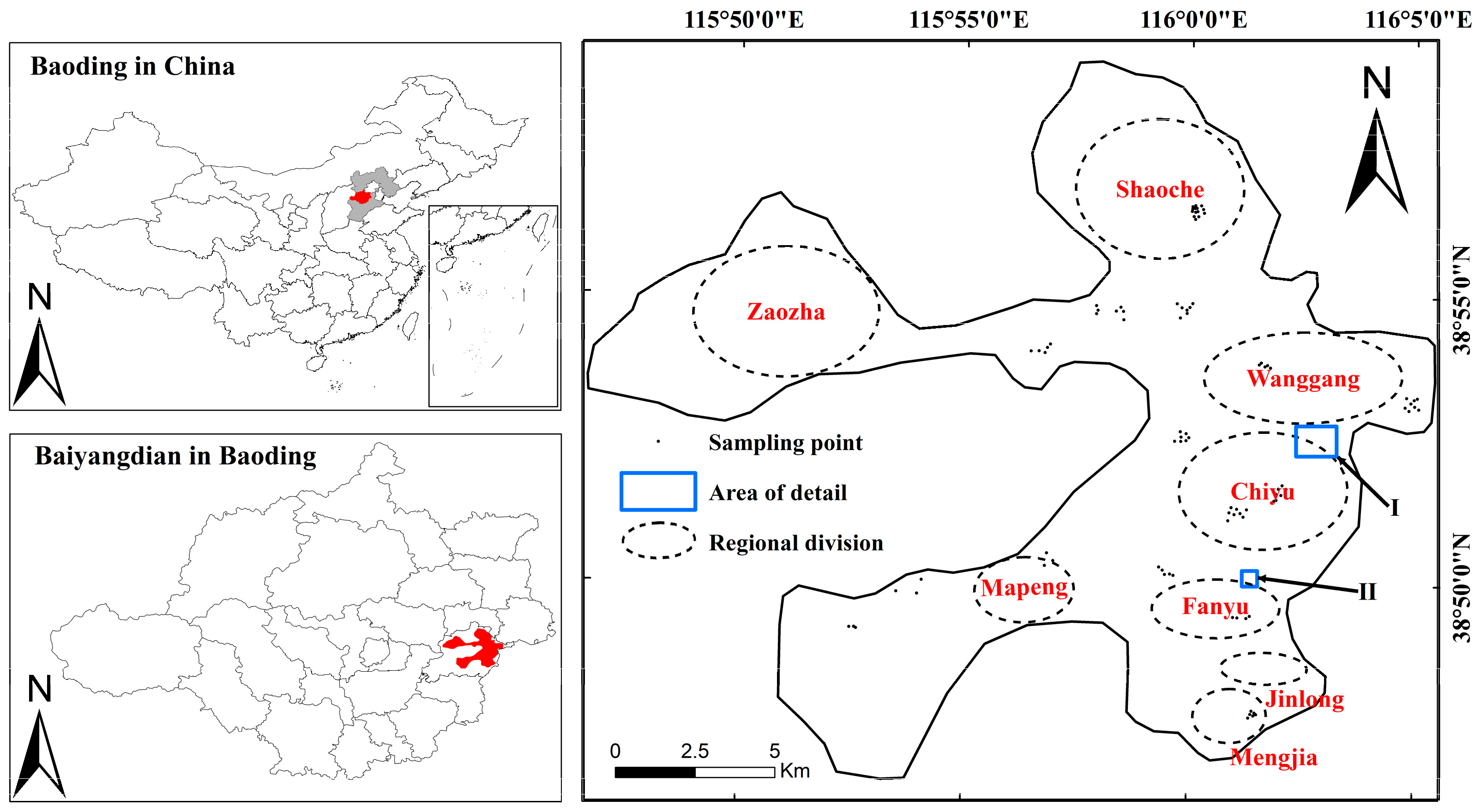
2.1.1. Research Area
2.1.2. Data and Processing
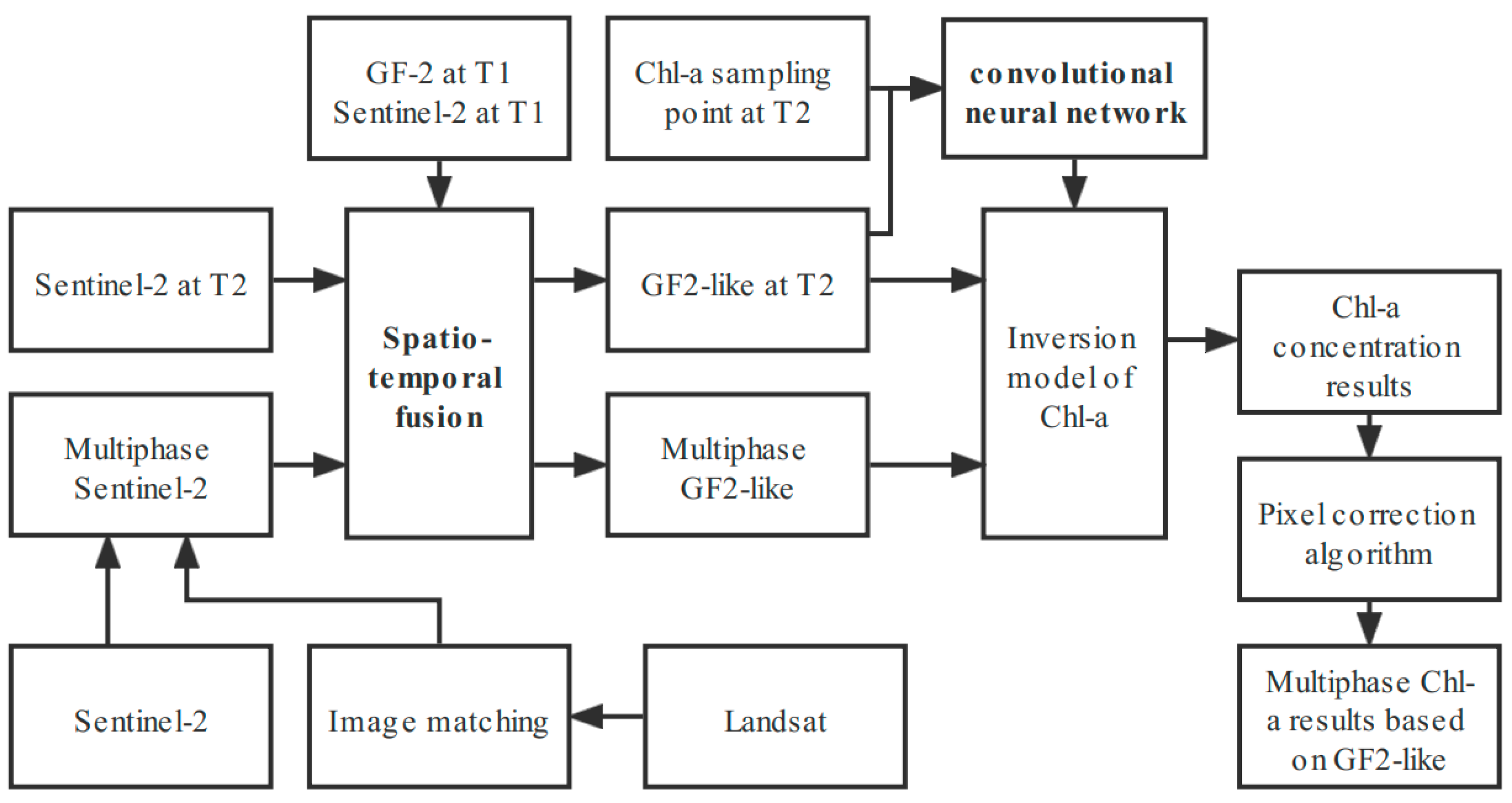
2.2. Methodology
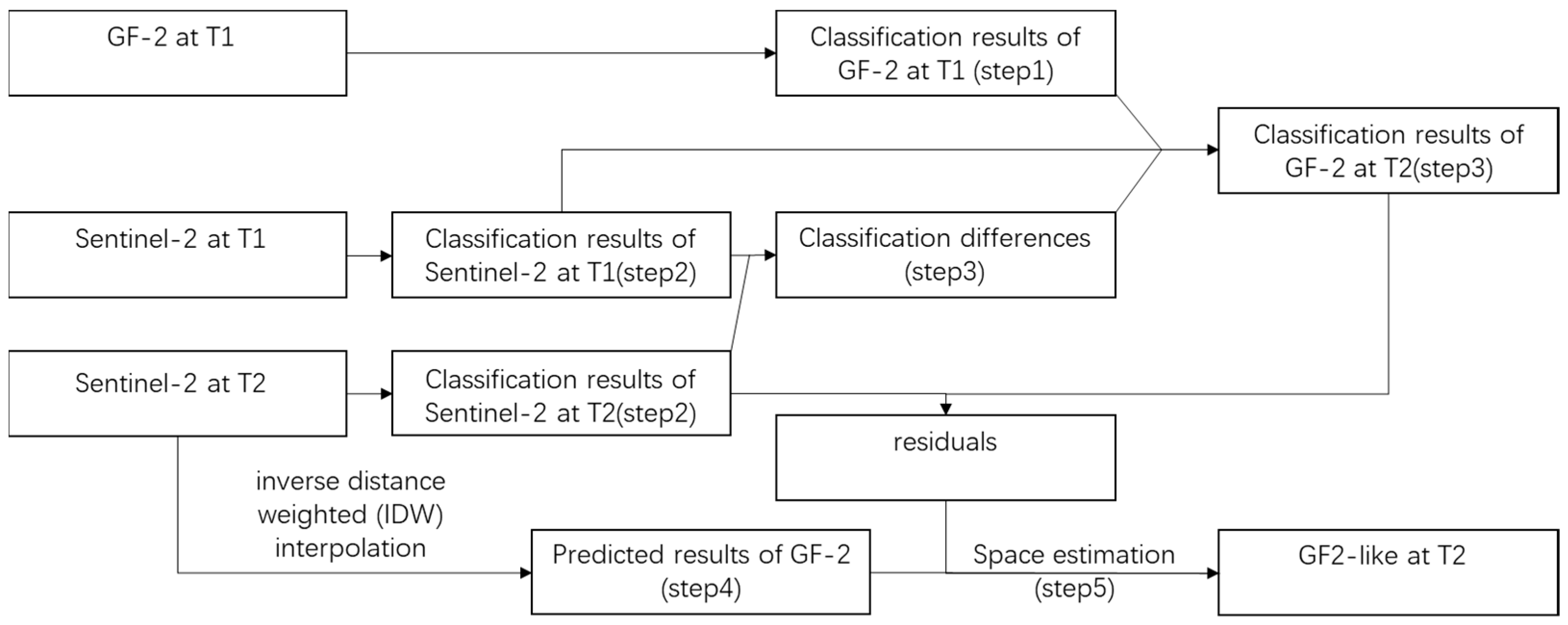
2.2.1. Spatial and Temporal Fusion Method
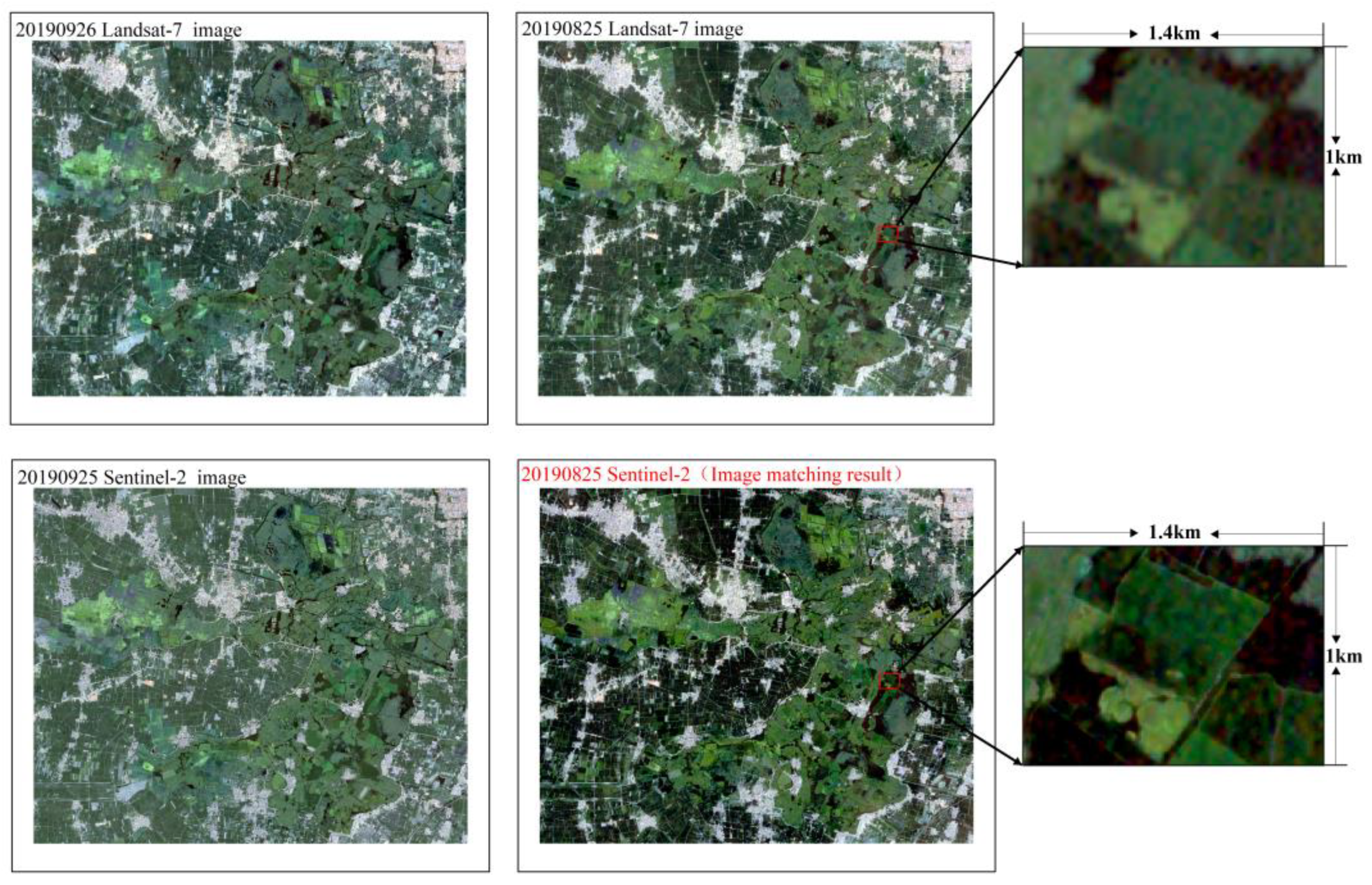
2.2.2. Image-Matching Algorithm
- All image preprocessing is equally sampled at a 10 m resolution, and the 5th percentile and 95th percentile of each band of the three input images are counted as , , , , , and , respectively. The DN range of the target image X is converted into the original image M:
- The residual of and M is calculated and superimposed on N:
- To determine the DN range of the target image, calculate the 5th percentile and 95th percentile of the image Y, denoted as , :where k is the conversion factor:
- Convert to Y:
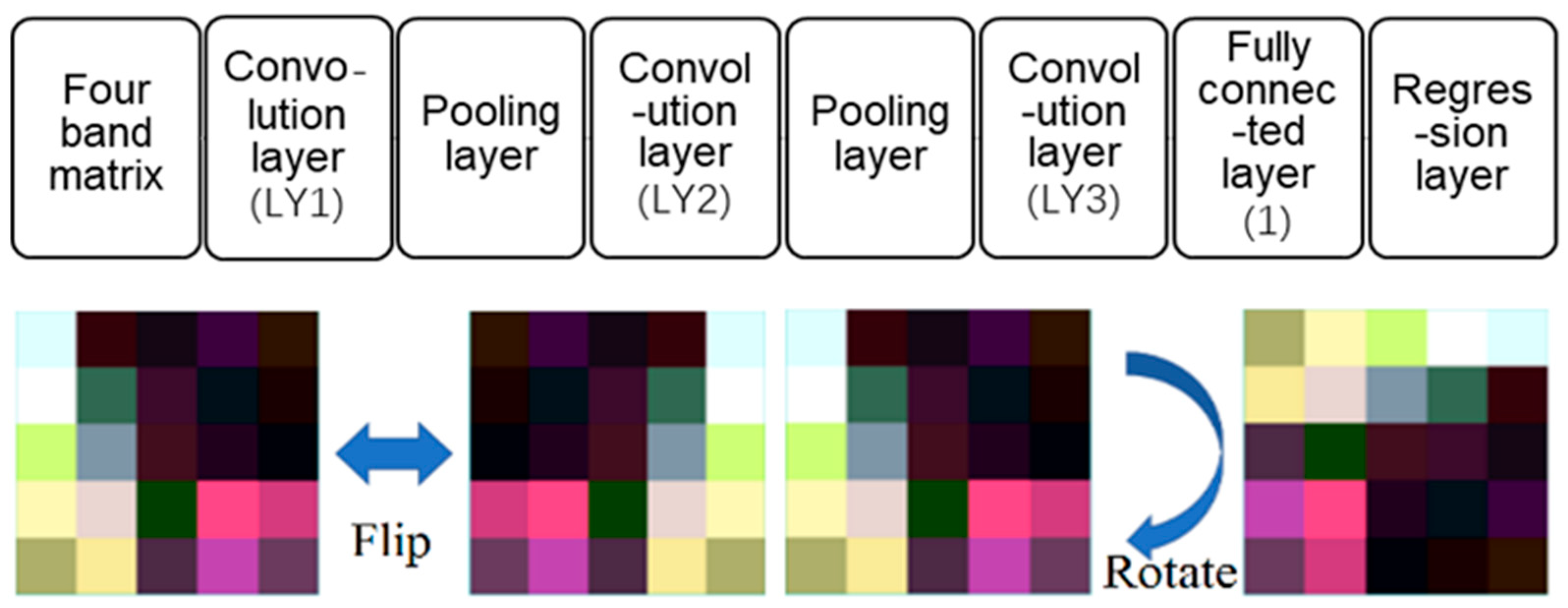
2.2.3. Chl-a Inversion Model Based on CNN
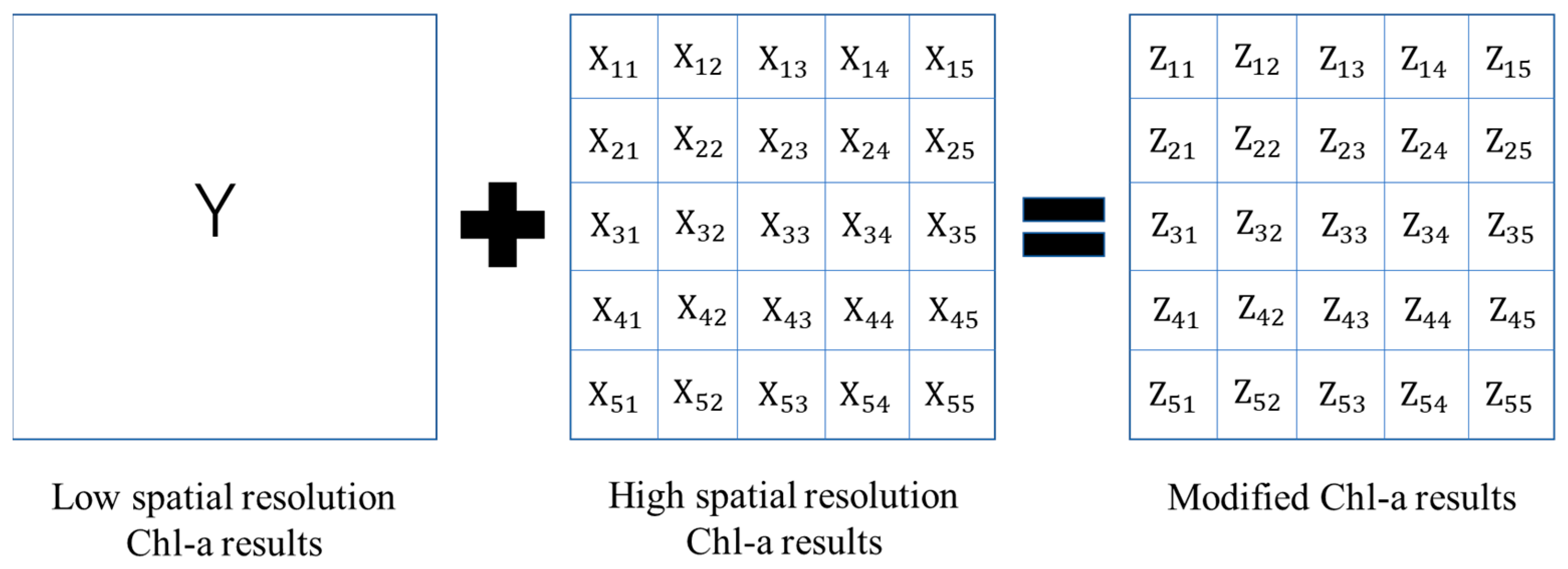
2.2.4. Pixel Correction Algorithm
- The unified up-sampling of high- and low-resolution Chl-a results of the same period to 2 m resolution is performed, and each set of 5 × 5 low-resolution pixels was homogenized to generate the corresponding confused pixel Y, whose expression is:where is the low-resolution image pixel after resampling.
- The scale factor k is calculated for each pair of corrected pixel, and the expression is:where in the formula is the correction before the image pixel, and Y is the corresponding low-resolution image pixel.
- Calculate each modified image pixel of the group according to the scale factor, and the expression is:where is the corrected image pixel.
3. Results
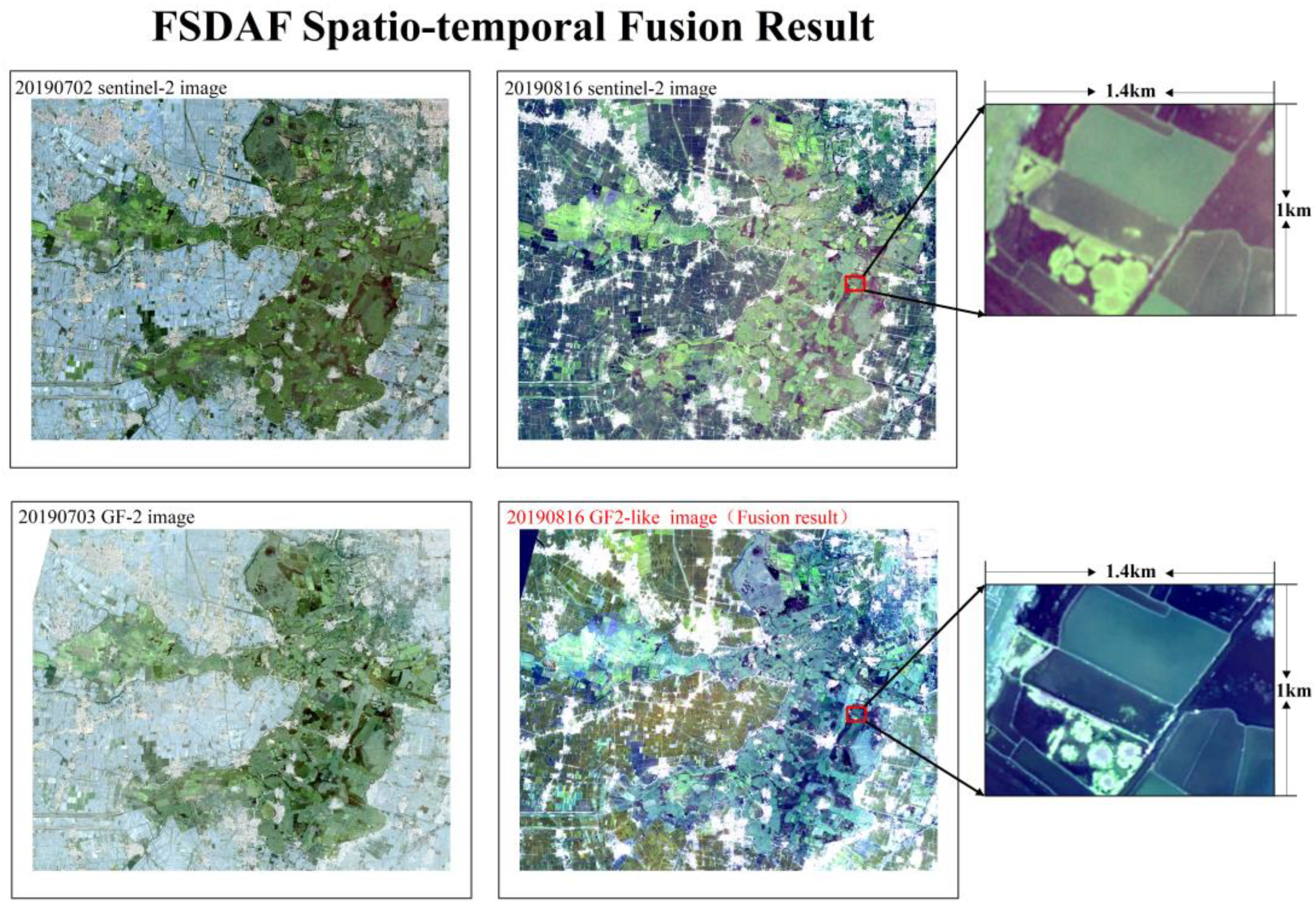
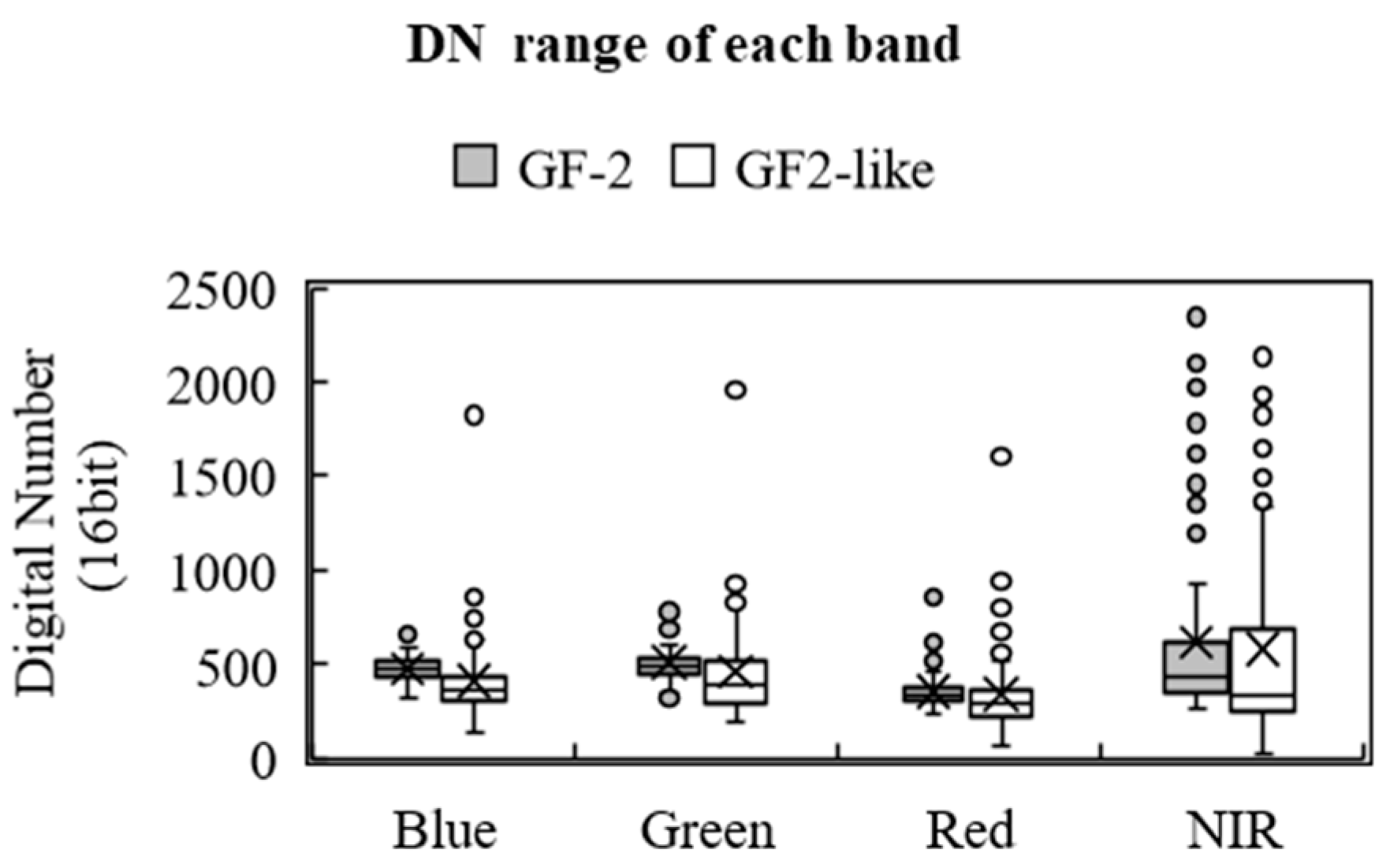
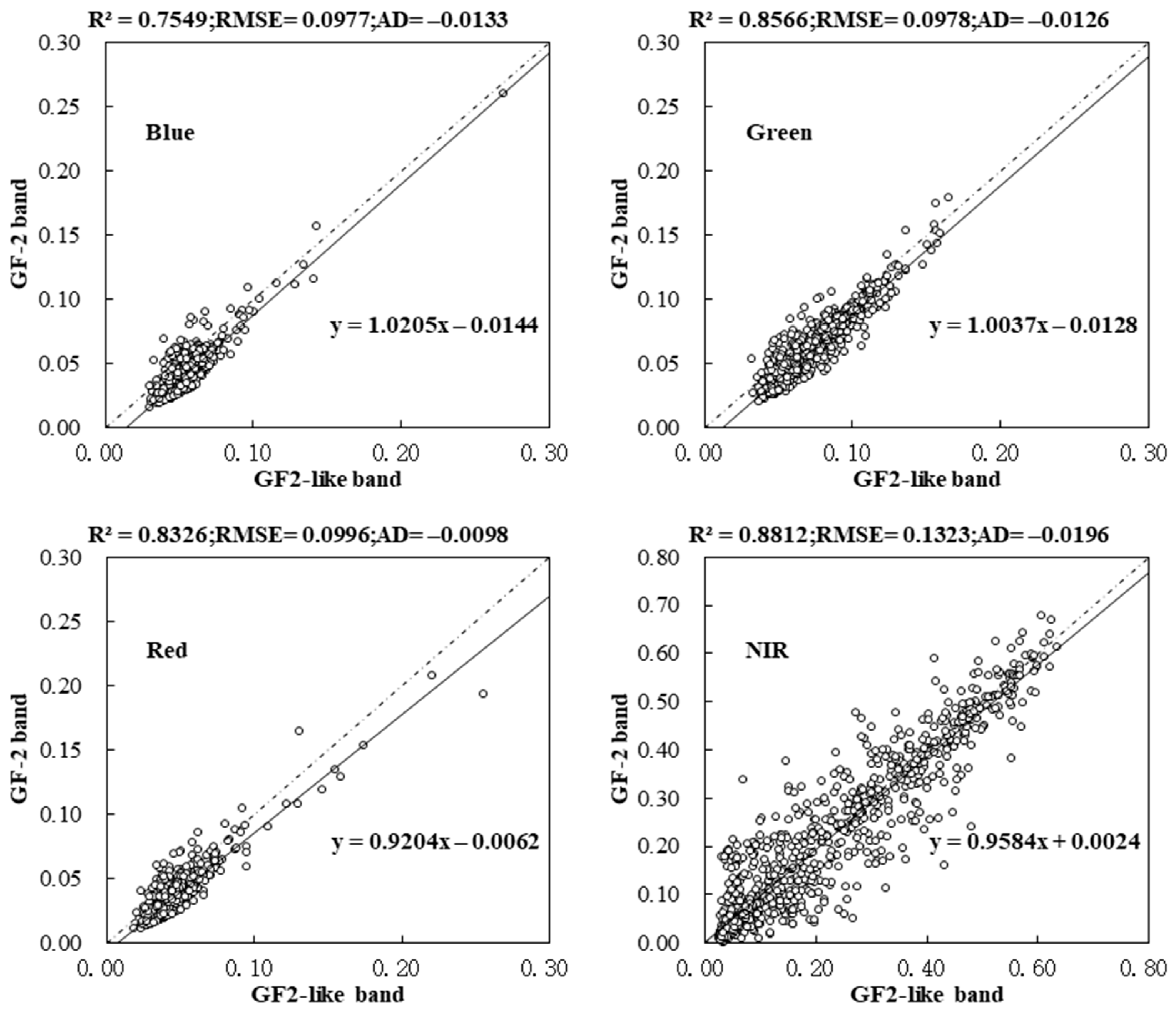
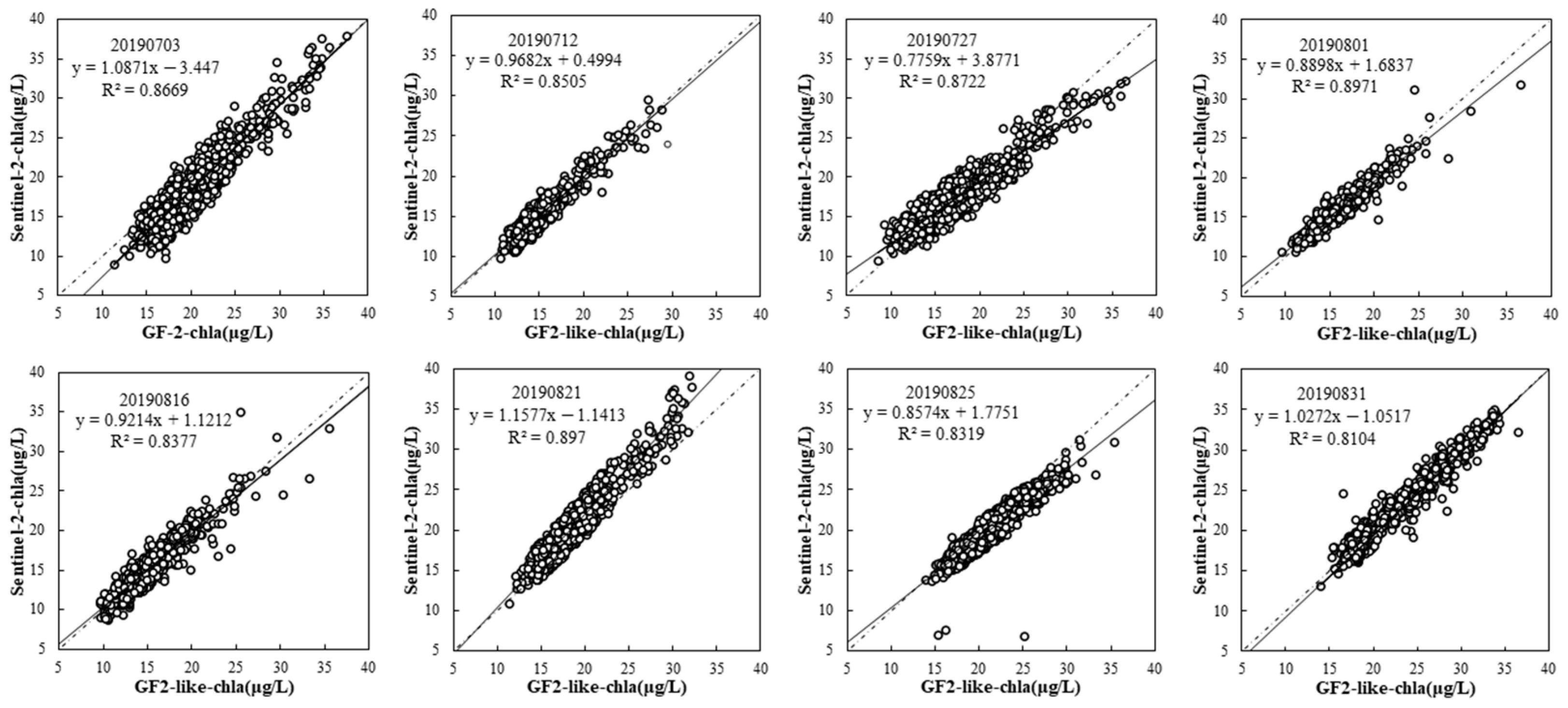
3.1. Spatio-Temporal Fusion Result
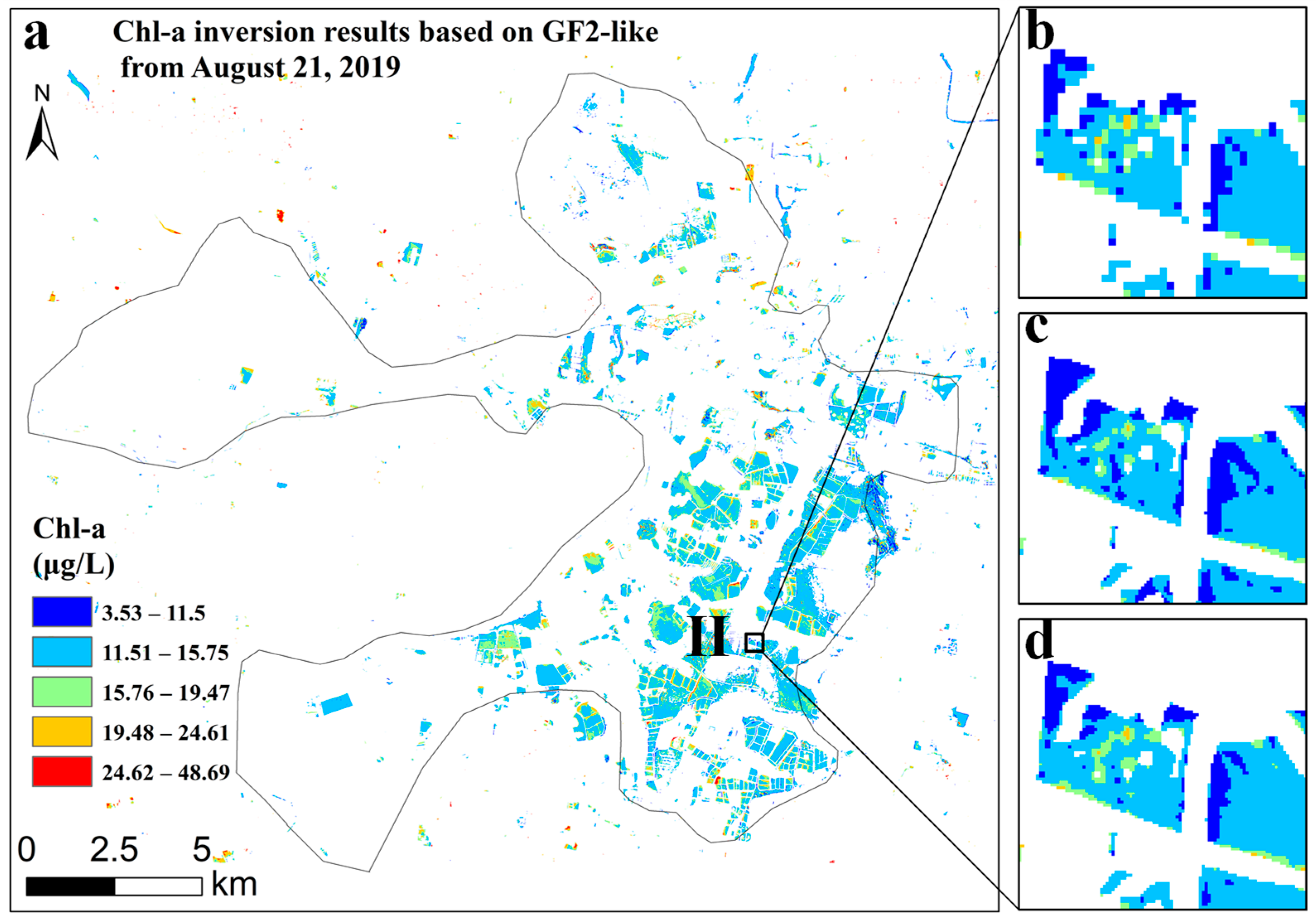
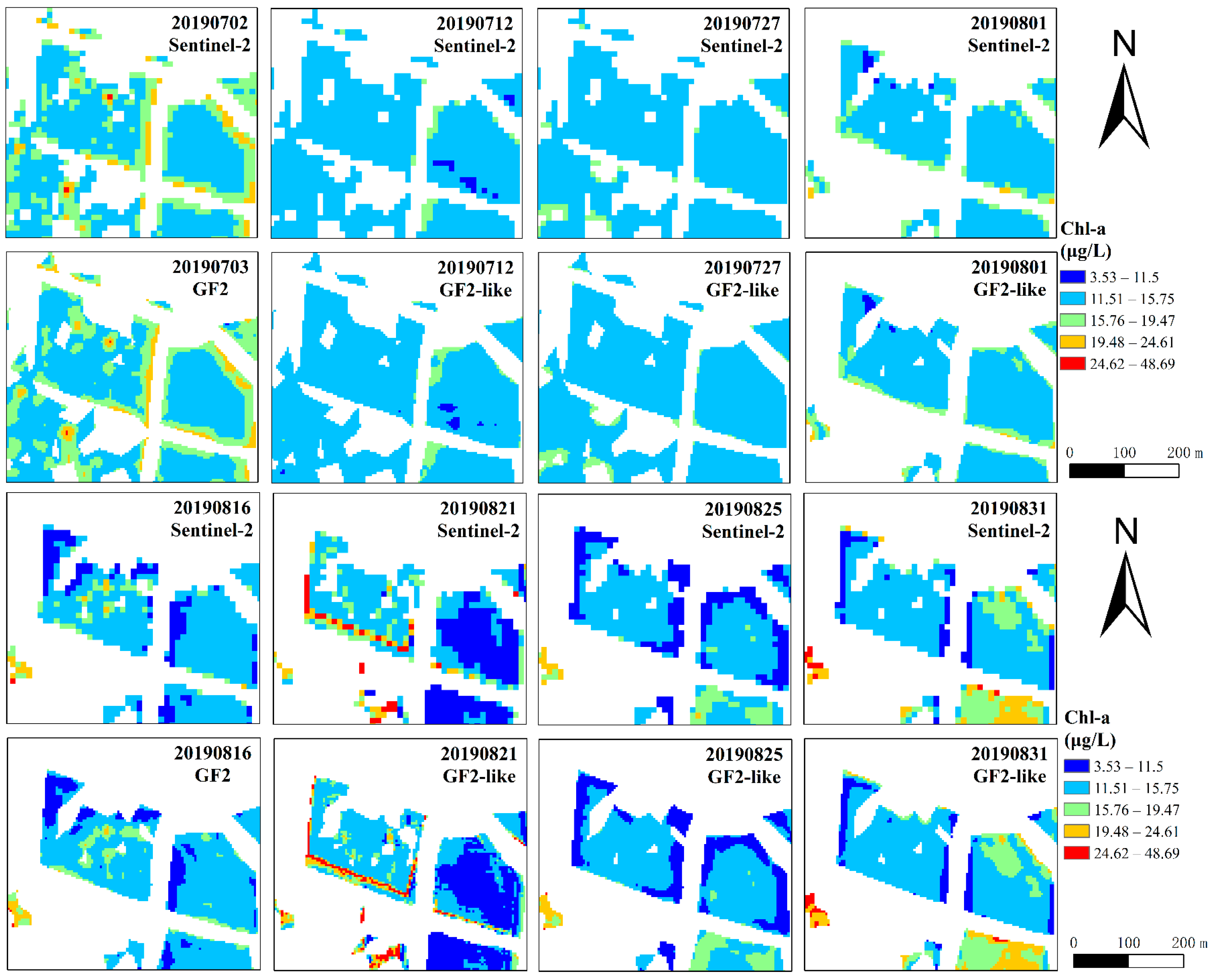
3.2. Chl-a Inversion Results
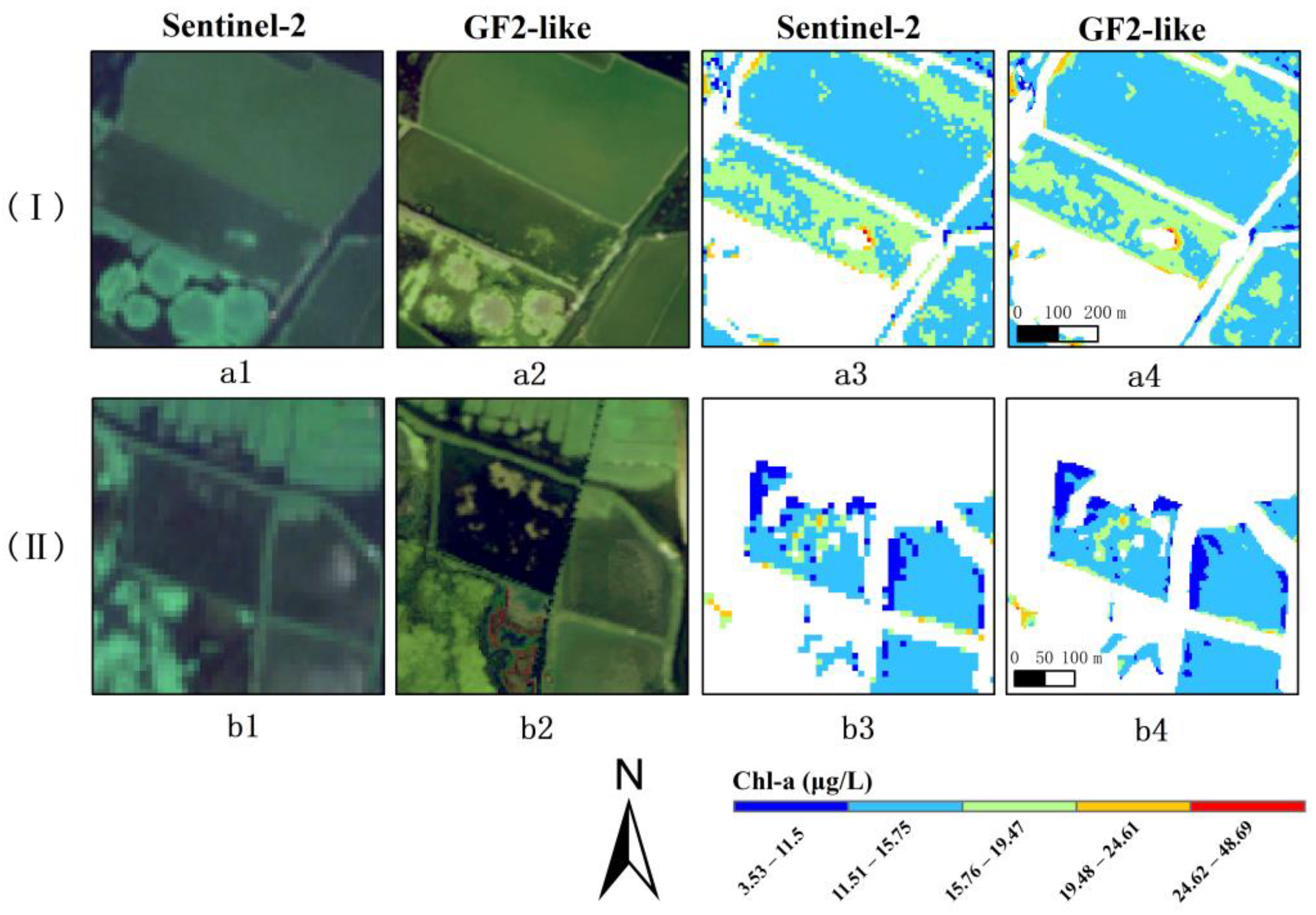
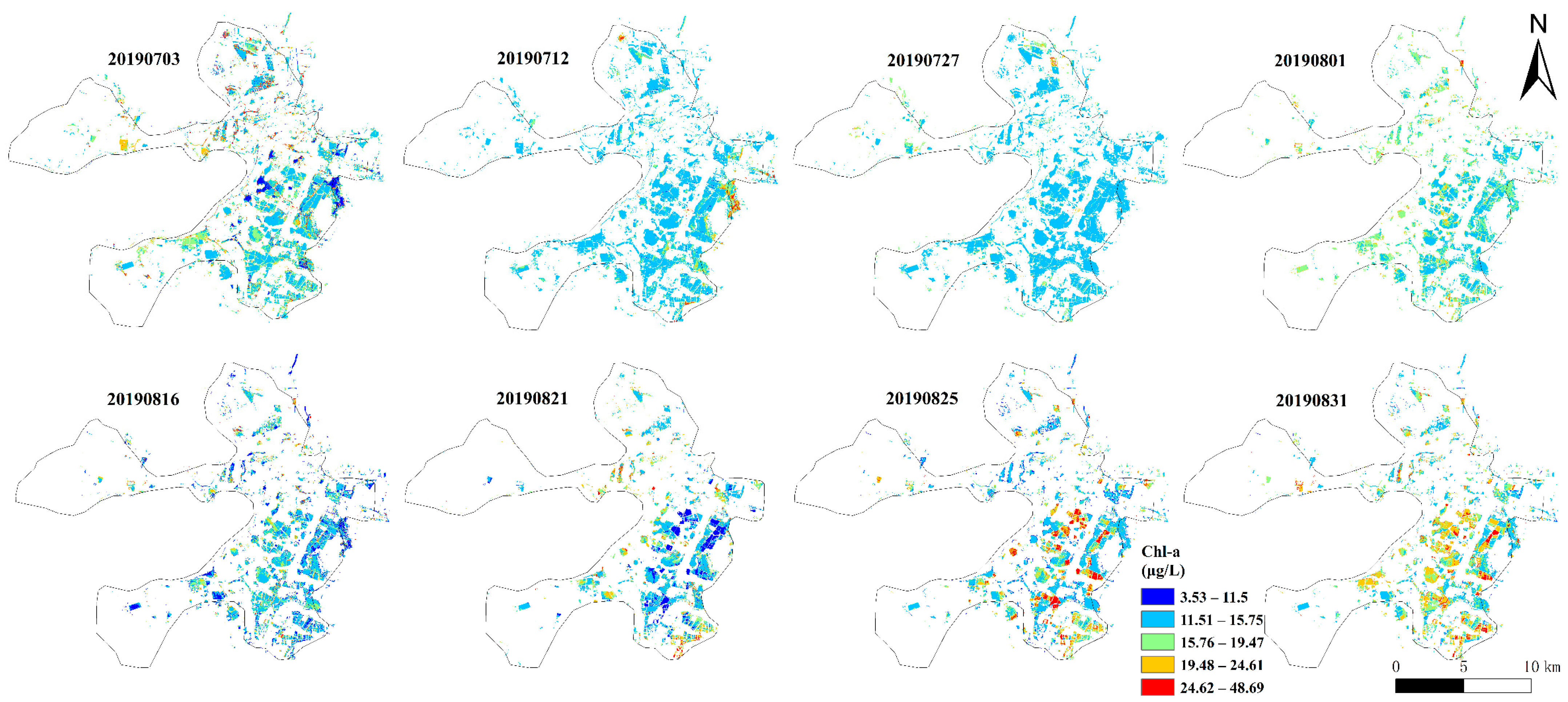
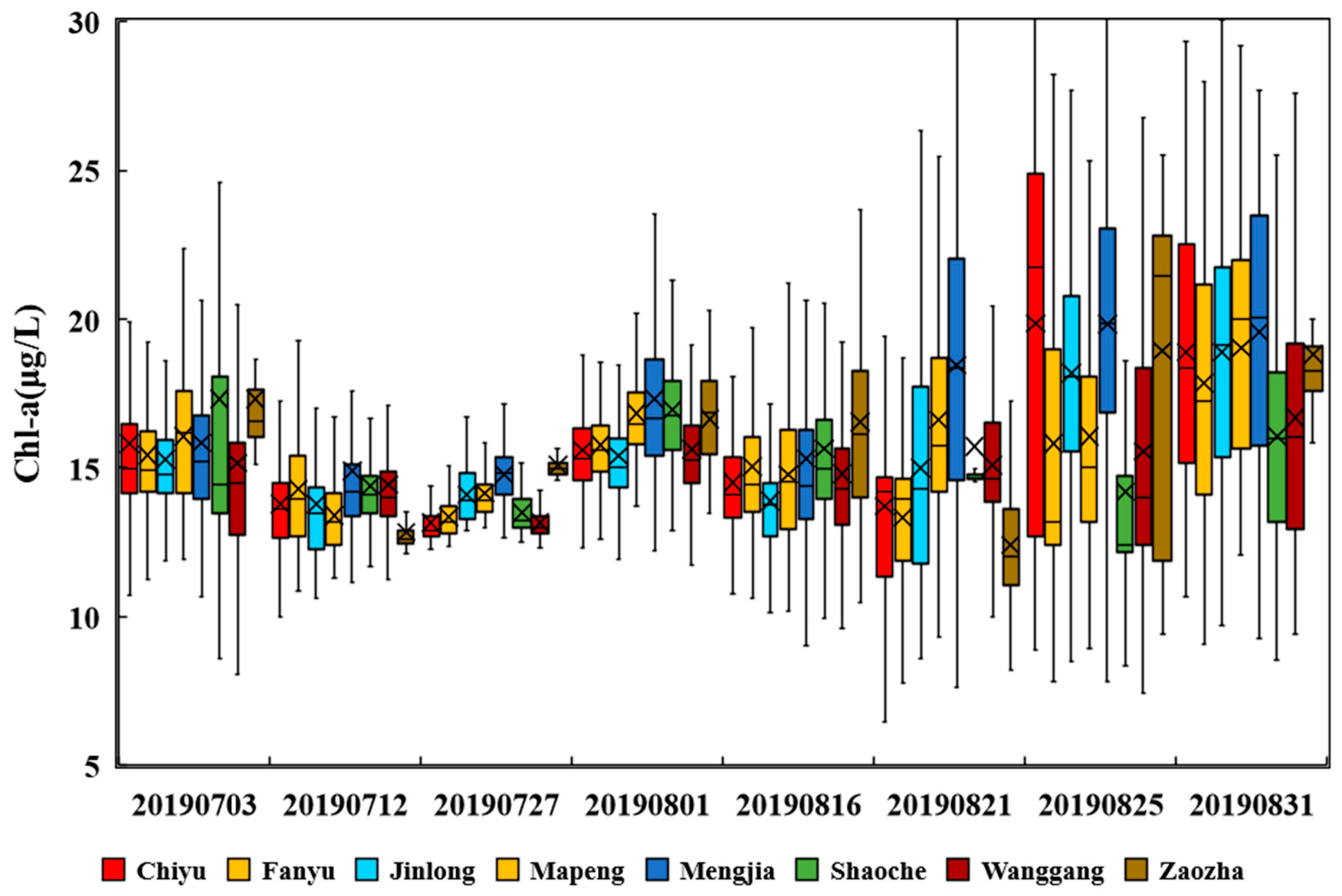
3.3. Comparison of Multi-Period Results
4. Discussion
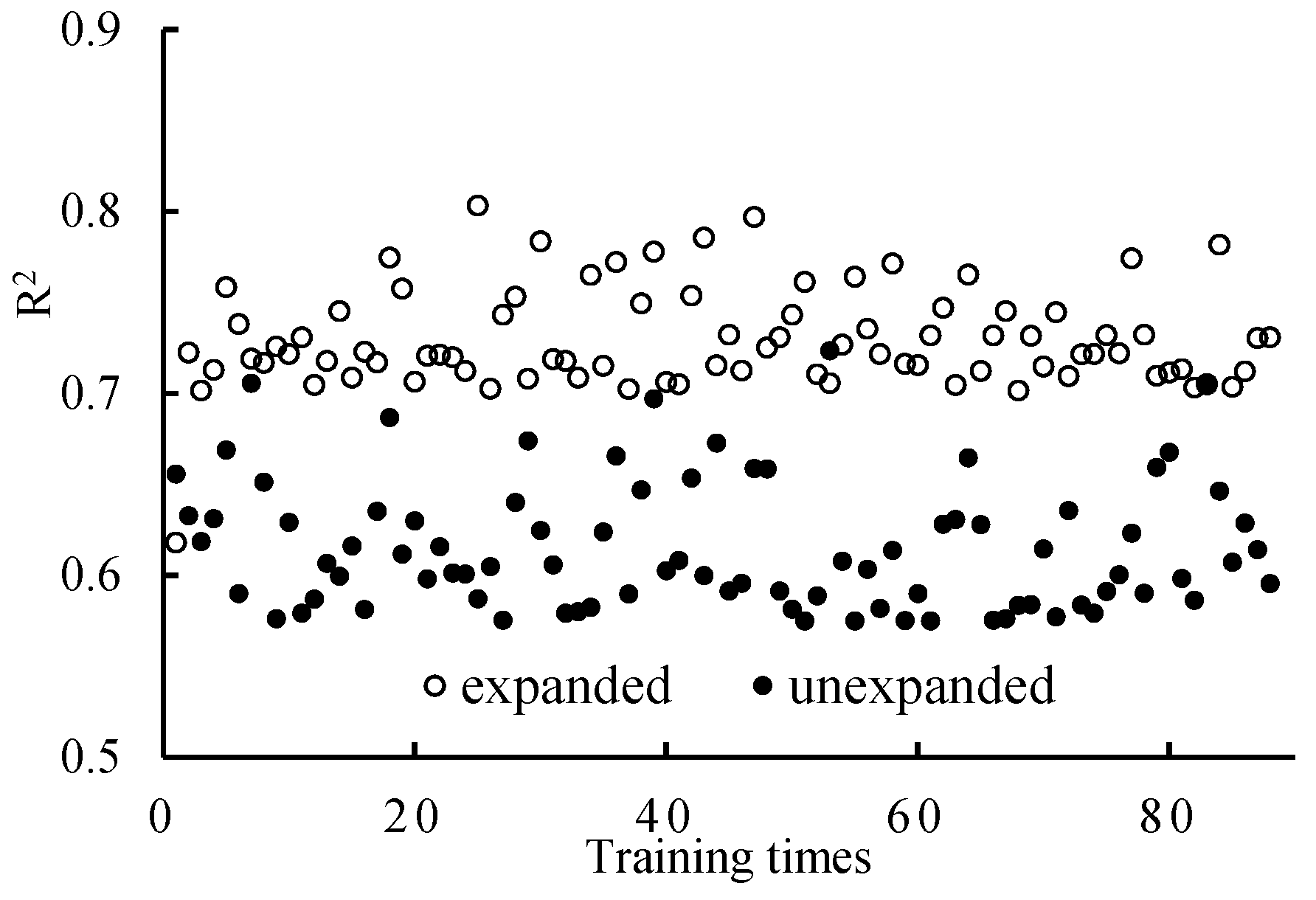
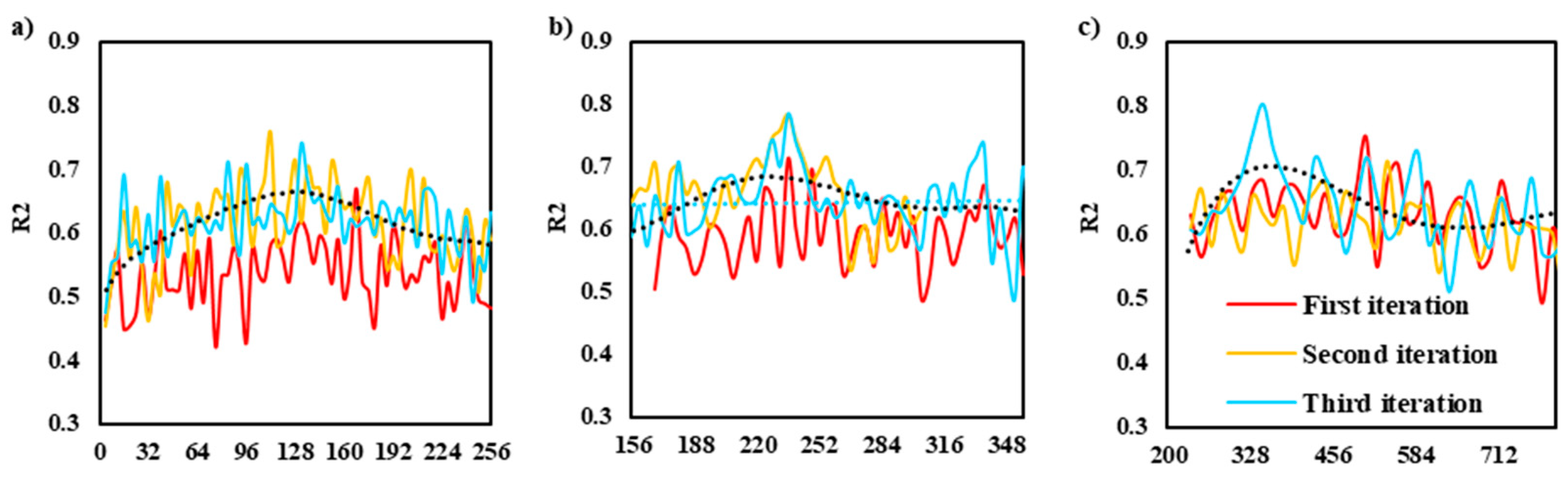
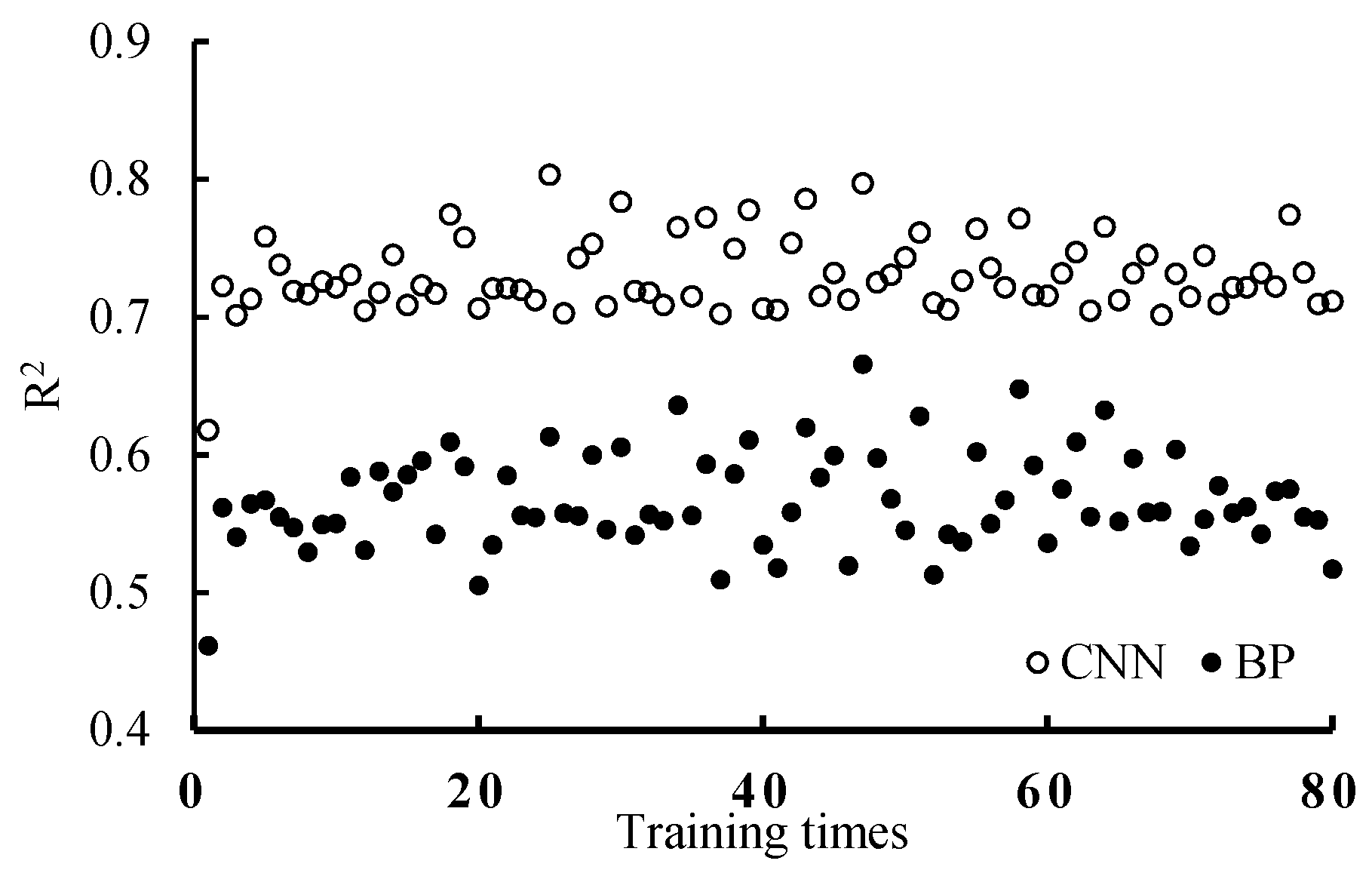
4.1. Sensitivity of Chl-a Inversion Model Based on CNN Structure
4.2. Advantages
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Galgani, L.; Loiselle, S.A. Plastic pollution impacts on marine carbon biogeochemistry. Environ. Pollut. 2021, 268, 115598. [Google Scholar] [CrossRef] [PubMed]
- Olaka, L.A.; Ogutu, J.O.; Said, M.Y.; Oludhe, C. Projected Climatic and Hydrologic Changes to Lake Victoria Basin Rivers under Three RCP Emission Scenarios for 2015–2100 and Impacts on the Water Sector. Water 2019, 11, 1449. [Google Scholar] [CrossRef] [Green Version]
- Fazi, S.; Amalfitano, S.; Venturi, S.; Pacini, N.; Vazquez, E.; Olaka, L.A.; Tassi, F.; Crognale, S.; Herzsprung, P.; Lechtenfeld, O.J.; et al. High concentrations of dissolved biogenic methane associated with cyanobacterial blooms in East African lake surface water. Commun. Biol. 2021, 4, 845. [Google Scholar] [CrossRef] [PubMed]
- Moss, B. Cogs in the endless machine: Lakes, climate change and nutrient cycles: A review. Sci. Total Environ. 2012, 434, 130–142. [Google Scholar] [CrossRef] [PubMed]
- Yin, D.; Wang, L.; Zhu, Z.; Clark, S.S.; Cao, Y.; Besek, J.; Dai, N. Water quality related to Conservation Reserve Program (CRP) and cropland areas: Evidence from multi-temporal remote sensing. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102272. [Google Scholar] [CrossRef]
- Schaeffer, B.A.; Schaeffer, K.G.; Keith, D.; Lunetta, R.S.; Conmy, R.; Gould, R.W. Barriers to adopting satellite remote sensing for water quality management. Int. J. Remote Sens. 2013, 34, 7534–7544. [Google Scholar] [CrossRef]
- Malahlela, O.E.; Iop. Spatio-temporal assessment of inland surface water quality using remote sensing data in the wake of changing climate. In Proceedings of the Third International Conference on Energy Engineering and Environmental Protection, Sanya, China, 19–21 November 2018; Volume 227. [Google Scholar]
- Pinardi, M.; Villa, P.; Free, G.; Giardino, C.; Bresciani, M. Evolution of Native and Alien Macrophytes in a Fluvial-wetland System Using Long-term Satellite Data. Wetlands 2021, 41, 16. [Google Scholar] [CrossRef]
- Villa, P.; Bresciani, M.; Bolpagni, R.; Braga, F.; Bellingeri, D.; Giardino, C. Impact of upstream landslide on perialpine lake ecosystem: An assessment using multi-temporal satellite data. Sci. Total Environ. 2020, 720, 137627. [Google Scholar] [CrossRef]
- Gupana, R.S.; Odermatt, D.; Cesana, I.; Giardino, C.; Nedbal, L.; Damm, A. Remote sensing of sun-induced chlorophyll-a fluorescence in inland and coastal waters: Current state and future prospects. Remote Sens. Environ. 2021, 262, 112482. [Google Scholar] [CrossRef]
- Yin, Z.; Li, J.; Liu, Y.; Xie, Y.; Zhang, F.; Wang, S.; Sun, X.; Zhang, B. Water clarity changes in Lake Taihu over 36 years based on Landsat TM and OLI observations. Int. J. Appl. Earth Obs. Geoinf. 2021, 102, 102457. [Google Scholar] [CrossRef]
- Randhawa, S.; Guruprasad, R.B.; Balivada, S.R.; Hirani, P.; Guha, S. Bluewater Eye: Using satellite as a low cost water pollution sensor: Analytics for deriving long term pollution insights based on mapping water turbidity. In Proceedings of the Remote Sensing for Agriculture, Ecosystems, and Hydrology Xx, Berlin, Germany, 10–13 September 2019; Volume 10783. [Google Scholar]
- Tsapanou, A.; Oikonomou, E.; Drakopoulos, P.; Poulos, S.; Sylaios, G. Coupling remote sensing data with in-situ optical measurements to estimate suspended particulate matter under the Evros river influence (North-East Aegean sea, Greece). Int. J. Remote Sens. 2020, 41, 2062–2080. [Google Scholar] [CrossRef]
- Campbell, G.; Phinn, S.R.; Dekker, A.G.; Brando, V.E. Remote sensing of water quality in an Australian tropical freshwater impoundment using matrix inversion and MERIS images. Remote Sens. Environ. 2011, 115, 2402–2414. [Google Scholar] [CrossRef] [Green Version]
- Yang, M.M.; Ishizaka, J.; Goes, J.I.; Gomes, H.d.R.; Maúre, E.d.R.; Hayashi, M.; Katano, T.; Fujii, N.; Saitoh, K.; Mine, T.; et al. Improved MODIS-Aqua Chlorophyll-a Retrievals in the Turbid Semi-Enclosed Ariake Bay, Japan. Remote Sens. 2018, 10, 1335. [Google Scholar] [CrossRef] [Green Version]
- Qun’ou, J.; Lidan, X.; Siyang, S.; Meilin, W.; Huijie, X. Retrieval model for total nitrogen concentration based on UAV hyper spectral remote sensing data and machine learning algorithms—A case study in the Miyun Reservoir, China. Ecol. Indic. 2021, 124, 107356. [Google Scholar] [CrossRef]
- Kuhn, C.; Valerio, A.d.M.; Ward, N.; Loken, L.; Sawakuchi, H.O.; Kampel, M.; Richey, J.; Stadler, P.; Crawford, J.; Striegl, R.; et al. Performance of Landsat-8 and Sentinel-2 surface reflectance products for river remote sensing retrievals of chlorophyll-a and turbidity. Remote Sens. Environ. 2019, 224, 104–118. [Google Scholar] [CrossRef] [Green Version]
- Wu, D.; Yu, W.; Xie, T. Application of GF-2 Satellite Data for Monitoring Organic Pollution Delivered to Water Bodies in the Guangdong-Hong Kong-Macao Greater Bay Area. Trop. Geogr. 2020, 40, 675–683. [Google Scholar]
- Jiang, G.; Loiselle, S.A.; Yang, D.; Ma, R.; Su, W.; Gao, C. Remote estimation of chlorophyll a concentrations over a wide range of optical conditions based on water classification from VIIRS observations. Remote Sens. Environ. 2020, 241, 111735. [Google Scholar] [CrossRef]
- Ekercin, S. Water Quality Retrievals from High Resolution Ikonos Multispectral Imagery: A Case Study in Istanbul, Turkey. Water Air Soil Pollut. 2007, 183, 239–251. [Google Scholar] [CrossRef]
- Bramich, J.M.; Bolch, C.J.; Fischer, A.M. Evaluation of atmospheric correction and high-resolution processing on SeaDAS-derived chlorophyll-a: An example from mid-latitude mesotrophic waters. Int. J. Remote Sens. 2018, 39, 2119–2138. [Google Scholar] [CrossRef]
- Andrzej Urbanski, J.; Wochna, A.; Bubak, I.; Grzybowski, W.; Lukawska-Matuszewska, K.; Łącka, M.; Śliwińska, S.; Wojtasiewicz, B.; Zajączkowski, M. Application of Landsat 8 imagery to regional-scale assessment of lake water quality. Int. J. Appl. Earth Obs. Geoinf. 2016, 51, 28–36. [Google Scholar] [CrossRef]
- Zhang, C.; Long, D.; Zhang, Y.; Anderson, M.C.; Kustas, W.P.; Yang, Y. A decadal (2008–2017) daily evapotranspiration data set of 1 km spatial resolution and spatial completeness across the North China Plain using TSEB and data fusion. Remote Sens. Environ. 2021, 262, 112519. [Google Scholar] [CrossRef]
- Cao, Z.; Ma, R.; Duan, H.; Xue, K.; Shen, M. Effect of Satellite Temporal Resolution on Long-Term Suspended Particulate Matter in Inland Lakes. Remote Sens. 2019, 11, 2785. [Google Scholar] [CrossRef] [Green Version]
- Johnson, M.C.; Reich, B.J.; Gray, J.M. Multisensor fusion of remotely sensed vegetation indices using space-time dynamic linear models. J. R. Stat. Soc. C-Appl. 2021, 70, 793–812. [Google Scholar] [CrossRef]
- Li, Y.; Sun, W.; Zhang, J.; Meng, J.; Zhao, Y. Reconstruction of arctic SST data and generation of multi-source satellite fusion products with high temporal and spatial resolutions. Remote Sens. Lett. 2021, 12, 695–703. [Google Scholar] [CrossRef]
- Chu, H.-J.; Kong, S.-J.; Chang, C.-H. Spatio-temporal water quality mapping from satellite images using geographically and temporally weighted regression. Int. J. Appl. Earth Obs. Geoinf. 2018, 65, 1–11. [Google Scholar] [CrossRef]
- Gao, W.; Shen, F.; Tan, K.; Zhang, W.; Liu, Q.; Lam, N.S.N.; Ge, J. Monitoring terrain elevation of intertidal wetlands by utilising the spatial-temporal fusion of multi-source satellite data: A case study in the Yangtze (Changjiang) Estuary. Geomorphology 2021, 383, 107683. [Google Scholar] [CrossRef]
- Liu, X.; Wang, M. Super-Resolution of VIIRS-Measured Ocean Color Products Using Deep Convolutional Neural Network. IEEE Trans. Geosci. Remote Sens. 2021, 59, 114–127. [Google Scholar] [CrossRef]
- Gao, F.; Masek, J.; Schwaller, M.; Hall, F. On the blending of the Landsat and MODIS surface reflectance: Predicting daily Landsat surface reflectance. IEEE Trans. Geosci. Remote Sens. 2006, 44, 2207–2218. [Google Scholar] [CrossRef]
- Fu, D.; Chen, B.; Wang, J.; Zhu, X.; Hilker, T. An Improved Image Fusion Approach Based on Enhanced Spatial and Temporal the Adaptive Reflectance Fusion Model. Remote Sens. 2013, 5, 6346–6360. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Li, A.; Jin, H.; Bian, J.; Zhang, Z.; Lei, G.; Qin, Z.; Huang, C. An Enhanced Spatial and Temporal Data Fusion Model for Fusing Landsat and MODIS Surface Reflectance to Generate High Temporal Landsat-Like Data. Remote Sens. 2013, 5, 5346–5368. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.; Helmer, E.H.; Gao, F.; Liu, D.; Chen, J.; Lefsky, M.A. A flexible spatiotemporal method for fusing satellite images with different resolutions. Remote Sens. Environ. 2016, 172, 165–177. [Google Scholar] [CrossRef]
- Alves, B.; Llovería, M.; Pérez-Cabello, F.; Vlassova, L. Fusing Landsat and MODIS data to retrieve multispectral information from fire-affected areas over tropical savannah environments in the Brazilian Amazon. Int. J. Remote Sens. 2018, 39, 7919–7941. [Google Scholar] [CrossRef]
- Chen, C.; Chen, Q.; Li, G.; He, M.; Dong, J.; Yan, H.; Wang, Z.; Duan, Z. A novel multi-source data fusion method based on Bayesian inference for accurate estimation of chlorophyll-a concentration over eutrophic lakes. Environ. Model. Softw. 2021, 141, 105057. [Google Scholar] [CrossRef]
- Abowarda, A.S.; Bai, L.; Zhang, C.; Long, D.; Li, X.; Huang, Q.; Sun, Z. Generating surface soil moisture at 30 m spatial resolution using both data fusion and machine learning toward better water resources management at the field scale. Remote Sens. Environ. 2021, 255, 112301. [Google Scholar] [CrossRef]
- Emelyanova, I.V.; McVicar, T.R.; Van Niel, T.G.; Li, L.T.; van Dijk, A.I.J.M. Assessing the accuracy of blending Landsat-MODIS surface reflectances in two landscapes with contrasting spatial and temporal dynamics: A framework for algorithm selection. Remote Sens. Environ. 2013, 133, 193–209. [Google Scholar] [CrossRef]
- Feng, L. Key issues in detecting lacustrine cyanobacterial bloom using satellite remote sensing. J. Lake Sci. 2021, 33, 647–652. [Google Scholar]
- Li, S.; Song, K.; Wang, S.; Liu, G.; Wen, Z.; Shang, Y.; Lyu, L.; Chen, F.; Xu, S.; Tao, H.; et al. Quantification of chlorophyll-a in typical lakes across China using Sentinel-2 MSI imagery with machine learning algorithm. Sci. Total Environ. 2021, 778, 146271. [Google Scholar] [CrossRef]
- Hu, C.; Feng, L.; Guan, Q. A Machine Learning Approach to Estimate Surface Chlorophyll a Concentrations in Global Oceans from Satellite Measurements. IEEE Trans. Geosci. Remote Sens. 2021, 59, 4590–4607. [Google Scholar] [CrossRef]
- Wang, H.; Seaborn, T.; Wang, Z.; Caudill, C.C.; Link, T.E. Modeling tree canopy height using machine learning over mixed vegetation landscapes. Int. J. Appl. Earth Obs. Geoinf. 2021, 101, 102353. [Google Scholar] [CrossRef]
- Cao, H.; Gong, T.; Yuan, C.; Jiang, J. Quantitative retrieval of chlorophyll-a concentration in northern part of Lake Taihu based on RBF model. Chin. J. Environ. Eng. 2016, 10, 6499–6504. [Google Scholar] [CrossRef]
- Tang, X.D.; Huang, M.T. Inversion of Chlorophyll-a Concentration in Donghu Lake Based on Machine Learning Algorithm. Water 2021, 13, 1179. [Google Scholar] [CrossRef]
- Zhang, G.; Huang, F.; Gong, S.; Sun, D.; Li, Y. Estimation of suspended solids concentration at the Taihu Lake using FY-3A/MERSI data. J. Northeast Norm. Univ. 2016, 48, 148–153. [Google Scholar]
- Lei, F.; Yu, Y.; Zhang, D.; Feng, L.; Guo, J.; Zhang, Y.; Fang, F. Water remote sensing eutrophication inversion algorithm based on multilayer convolutional neural network. J. Intell. Fuzzy Syst. 2020, 39, 5319–5327. [Google Scholar] [CrossRef]
- Zhou, Y.; He, B.; Xiao, F.; Feng, Q.; Kou, J.; Liu, H. Retrieving the Lake Trophic Level Index with Landsat-8 Image by Atmospheric Parameter and RBF: A Case Study of Lakes in Wuhan, China. Remote Sens. 2019, 11, 457. [Google Scholar] [CrossRef] [Green Version]
- Pyo, J.; Park, L.J.; Pachepsky, Y.; Baek, S.-S.; Kim, K.; Cho, K.H. Using convolutional neural network for predicting cyanobacteria concentrations in river water. Water Res. 2020, 186, 116349. [Google Scholar] [CrossRef]
- Zhao, X.; Xu, H.; Ding, Z.; Wang, D.; Deng, Z.; Wang, Y.; Wu, T.; Li, W.; Lu, Z.; Wang, G. Comparing deep learning with several typical methods in prediction of assessing chlorophyll-a by remote sensing: A case study in Taihu Lake, China. Water Supply 2021, 21, 3710–3724. [Google Scholar] [CrossRef]
- Xi, C.; Mingwu, O.; Shi, J.; Ying, L. Remote Sensing Retrieval and Evaluation of Chlorophyll-a Concentration in East Dongting Lake, China. IOP Conf. Ser. Earth Environ. Sci. 2021, 668, 012035. [Google Scholar] [CrossRef]
- Xue, Y.; Zhu, L.; Zou, B.; Wen, Y.-M.; Long, Y.-H.; Zhou, S.-L. Research on Inversion Mechanism of Chlorophyll-A Concentration in Water Bodies Using a Convolutional Neural Network Model. Water 2021, 13, 664. [Google Scholar] [CrossRef]
- Cao, Z.; Ma, R.; Duan, H.; Pahlevan, N.; Melack, J.; Shen, M.; Xue, K. A machine learning approach to estimate chlorophyll-a from Landsat-8 measurements in inland lakes. Remote Sens. Environ. 2020, 248, 111974. [Google Scholar] [CrossRef]
- Zhao, Y.; Wang, S.; Zhang, F.; Shen, Q.; Li, J.; Yang, F. Remote Sensing-Based Analysis of Spatial and Temporal Water Colour Variations in Baiyangdian Lake after the Establishment of the Xiong’an New Area. Remote Sens. 2021, 13, 1729. [Google Scholar] [CrossRef]
- Zhu, J.; Zhou, Y.; Wang, S.; Wang, L.; Liu, W.; Li, H.; Mei, J. Ecological function evaluation and regionalization in Baiyangdian Wetland. Acta Ecol. Sin. 2020, 40, 459–472. [Google Scholar]
- Yang, H.; Xi, C.; Zhao, X.; Mao, P.; Wang, Z.; Shi, Y.; He, T.; Li, Z. Measuring the Urban Land Surface Temperature Variations under Zhengzhou City Expansion Using Landsat-Like Data. Remote Sens. 2020, 12, 801. [Google Scholar] [CrossRef] [Green Version]
- Pu, F.L.; Ding, C.J.; Chao, Z.Y.; Yu, Y.; Xu, X. Water-Quality Classification of Inland Lakes Using Landsat8 Images by Convolutional Neural Networks. Remote Sens. 2019, 11, 1674. [Google Scholar] [CrossRef] [Green Version]
- Maier, P.M.; Keller, S.; Hinz, S. Deep Learning with WASI Simulation Data for Estimating Chlorophyll a Concentration of Inland Water Bodies. Remote Sens. 2021, 13, 718. [Google Scholar] [CrossRef]
- Aptoula, E.; Ariman, S. Chlorophyll-a Retrieval from Sentinel-2 Images Using Convolutional Neural Network Regression. IEEE Geosci. Remote Sens. Lett. 2022, 19, 6002605. [Google Scholar] [CrossRef]
- Yang, Z.; Lu, X.; Wu, Y.; Miao, P.; Zhou, J. Retrieval and model construction of water quality parameters for UAV hyperspectral remote sensing. Sci. Surv. Mapp. 2020, 45, 60. [Google Scholar]
- Niroumand-Jadidi, M.; Bovolo, F.; Bruzzone, L. Water Quality Retrieval from PRISMA Hyperspectral Images: First Experience in a Turbid Lake and Comparison with Sentinel-2. Remote Sens. 2020, 12, 3984. [Google Scholar] [CrossRef]
- Du, X.F.; He, Y.F.; Li, J.M.; Xie, X.; IEEE. Single Image Super-Resolution via Multi-Scale Fusion Convolutional Neural Network. In Proceedings of the 8th IEEE International Conference on Awareness Science and Technology (iCAST), Chaoyang University of Technology, Taichung, Taiwan, 8–10 November 2017; pp. 544–551. [Google Scholar]
- Wang, Y.H.; Gu, L.J.; Ren, R.Z.; Zheng, X.; Fan, X.T. A Land-cover Classification Method of High-resolution Remote Sensing Imagery Based on Convolution Neural Network. In Proceedings of the Conference on Earth Observing Systems XXIII, San Diego, CA, USA, 21–23 August 2018. [Google Scholar]
- Liu, D.; Yu, S.; Duan, H. Different storm responses of organic carbon transported to Lake Taihu by the eutrophic Tiaoxi River, China. Sci. Total Environ. 2021, 782, 146874. [Google Scholar] [CrossRef]
- Chen, J.; Zhu, W.N.; Tian, Y.Q.; Yu, Q.; Zheng, Y.H.; Huang, L.T. Remote estimation of colored dissolved organic matter and chlorophyll-a in Lake Huron using Sentinel-2 measurements. J. Appl. Remote Sens. 2017, 11, 036007. [Google Scholar] [CrossRef]
- Wu, H.; Guo, Q.; Zang, J.; Qiao, Y.; Zhu, L.; He, Y. Study on Water Quality Parameter Inversion based on Landsat 8 and Measured Data. Remote Sens. Technol. Appl. 2021, 36, 898–907. [Google Scholar]
- Hui, J.; Yao, L. Analysis and Inversion of the Nutritional Status of China’s Poyang Lake Using MODIS Data. J. Indian Soc. Remote Sens. 2016, 44, 837–842. [Google Scholar] [CrossRef]
- Lin, H.; Wu, X.; Liu, F.; Bian, J. Wetland resources monitoring for Baiyangdian lake by remote sensing technology. J. Cent. South Univ. For. Technol. 2012, 32, 127–130. [Google Scholar]
- Liu, C.J.; Duan, P.; Zhang, F.; Jim, C.Y.; Tan, M.L.; Chan, N.W. Feasibility of the Spatiotemporal Fusion Model in Monitoring Ebinur Lake’s Suspended Particulate Matter under the Missing-Data Scenario. Remote Sens. 2021, 13, 3952. [Google Scholar] [CrossRef]
- Li, C.; Cui, Y.; Wei, Y.; Xu, X.; Jiao, Y.; Wang, H. Preliminary studies on regulation of ecological water level of the Baiyangdian. China Water Resour. 2021, 72, 29–37. [Google Scholar]
- He, L.; Xiao, H.; Luo, Z.; Ming, W. Assessment of rainstorm impact on chlorophyll-a in Bohai Bay by MODlS-250 m. China Sci. 2015, 10, 2534–2538. [Google Scholar]
- Hernandez, J.A.; IEEE. Learning from data: Applications of Machine Learning in optical network design and modeling. In Proceedings of the International Conference on Optical Network Design and Modeling (ONDM), Castelldefels, Spain, 18–21 May 2020. [Google Scholar]
- Xiao, Z.; Wang, D.; Wen, J.; Fang, H.; Hu, Y.; Xu, N. Overview of the ground application system of satellite-aviation-ground remote sensing data at home and abroad. J. Geomech. 2015, 21, 117–128. [Google Scholar]
- Cao, Z.; Ma, R.; Liu, J.; Ding, J. Improved Radiometric and Spatial Capabilities of the Coastal Zone Imager Onboard Chinese HY-1C Satellite for Inland Lakes. IEEE Geosci. Remote Sens. Lett. 2021, 18, 193–197. [Google Scholar] [CrossRef]
- Shi, C.L.; Wang, X.H.; Zhang, M.; Liang, X.J.; Niu, L.Z.; Han, H.Q.; Zhu, X.M. A Comprehensive and Automated Fusion Method: The Enhanced Flexible Spatiotemporal DAta Fusion Model for Monitoring Dynamic Changes of Land Surface. Appl. Sci. 2019, 9, 3693. [Google Scholar] [CrossRef] [Green Version]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | The Date of the Image Covering BYD Lake from July to August (2019) | |||||||
|---|---|---|---|---|---|---|---|---|
| 7–2 | 7–12 | 7–27 | 8–1 | 8–16 | 8–21 | 8–25 | 8–31 | |
| Landsat 7 | / | / | / | / | / | / | √ | / |
| Landsat 8 | / | / | / | √ | 8–17 | / | / | / |
| Sentinel-2 | √ | √ | √ | / | √ | √ | / | √ |
| GF-2 | 7–3 | / | / | / | √ | / | / | / |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, H.; Du, Y.; Zhao, H.; Chen, F. Water Quality Chl-a Inversion Based on Spatio-Temporal Fusion and Convolutional Neural Network. Remote Sens. 2022, 14, 1267. https://doi.org/10.3390/rs14051267
Yang H, Du Y, Zhao H, Chen F. Water Quality Chl-a Inversion Based on Spatio-Temporal Fusion and Convolutional Neural Network. Remote Sensing. 2022; 14(5):1267. https://doi.org/10.3390/rs14051267
Chicago/Turabian StyleYang, Haibo, Yao Du, Hongling Zhao, and Fei Chen. 2022. "Water Quality Chl-a Inversion Based on Spatio-Temporal Fusion and Convolutional Neural Network" Remote Sensing 14, no. 5: 1267. https://doi.org/10.3390/rs14051267