
Rényi Entropy-Based Adaptive Integration Method for 5G-Based Passive Radar Drone Detection


Abstract
:
1. Introduction
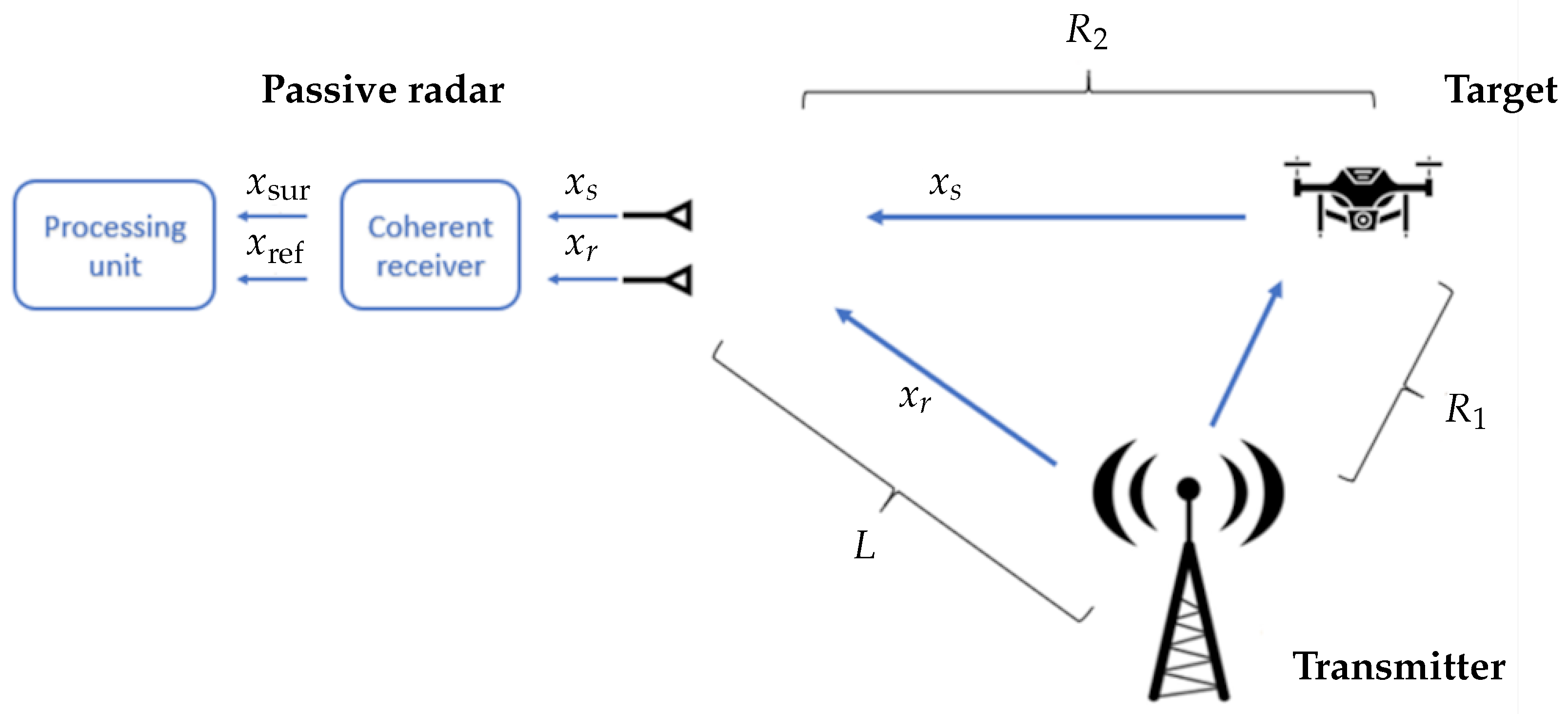
2. 5G Passive Radar Principles
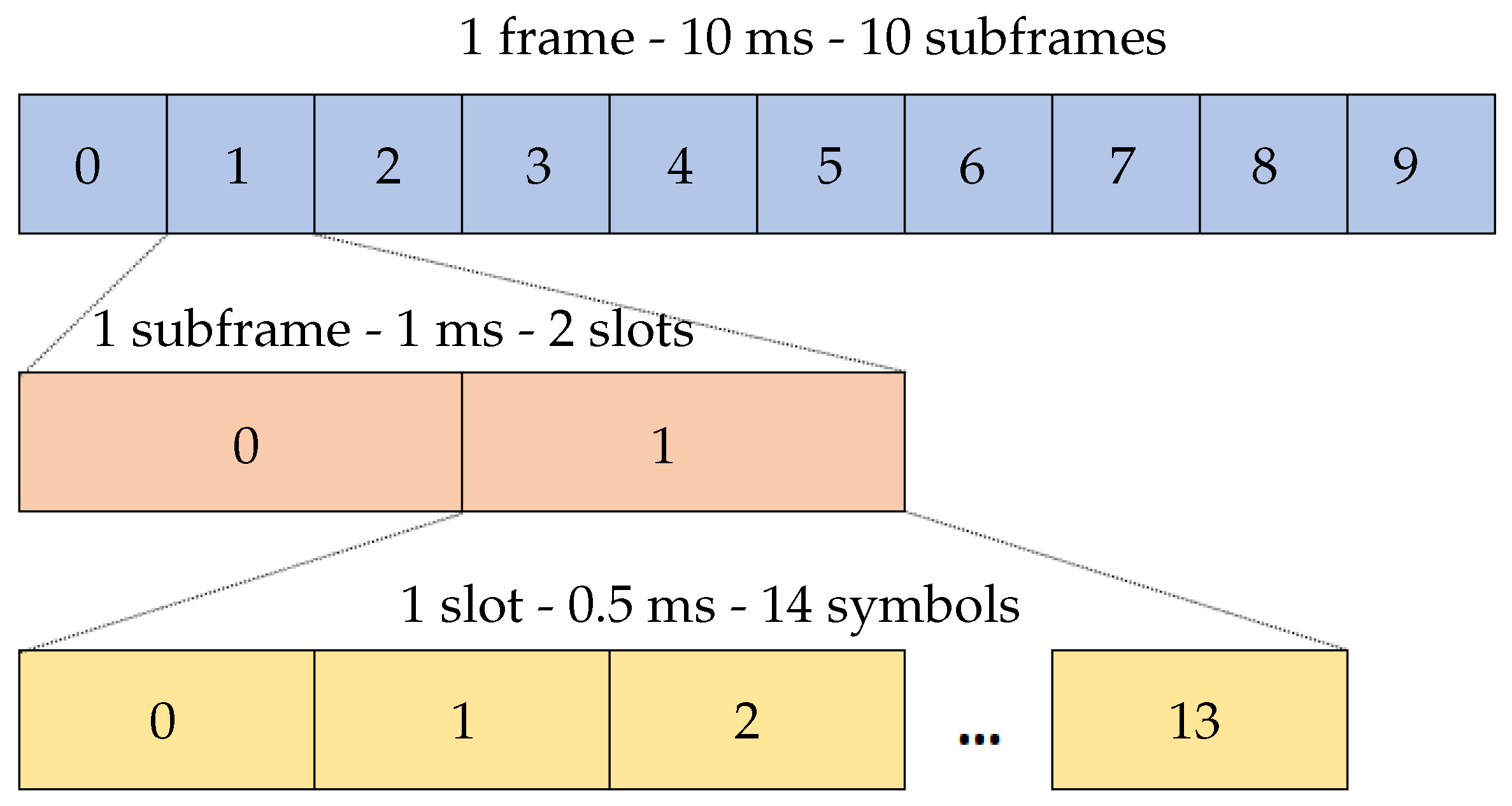
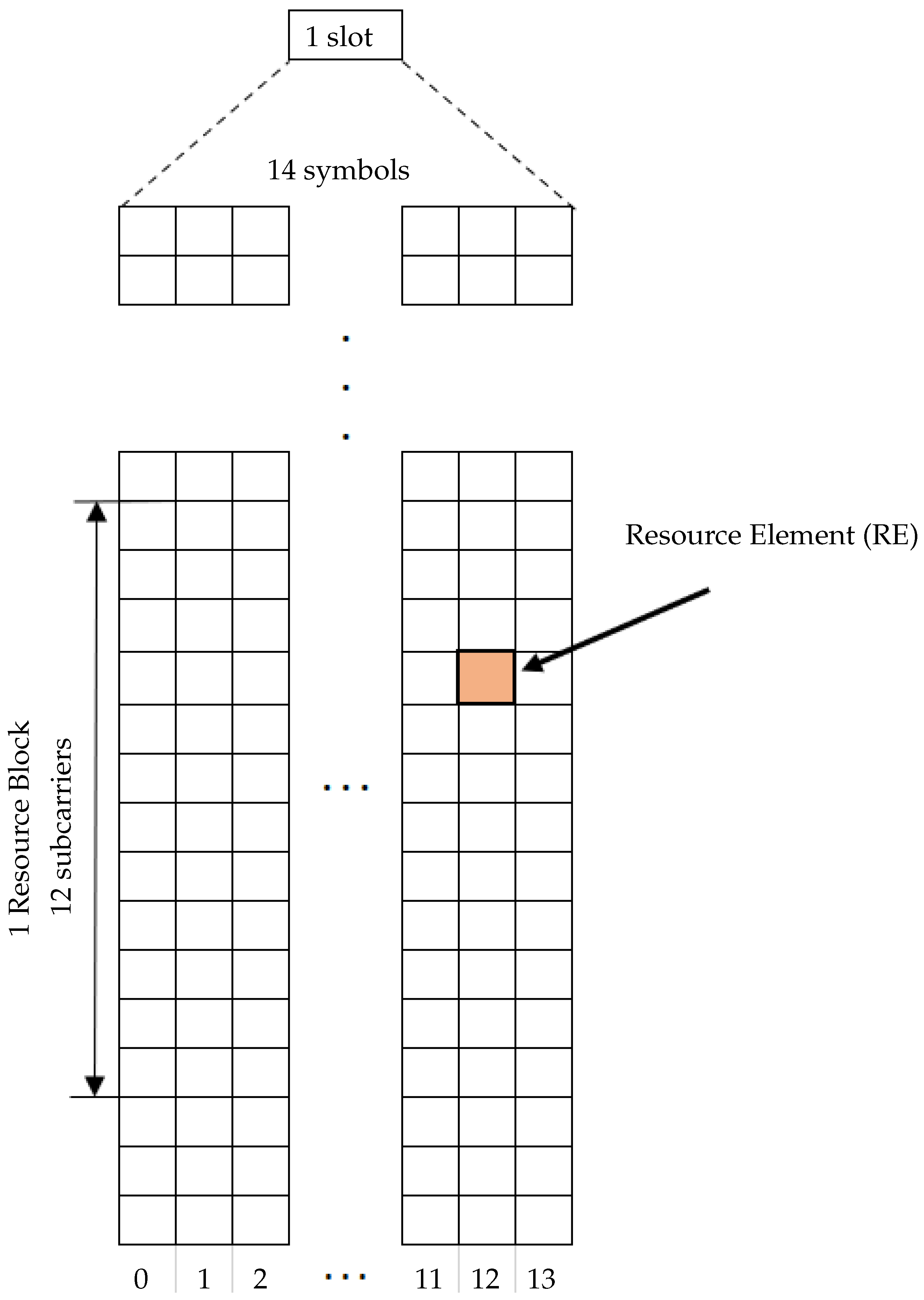
3. 5G NR Signal Characteristics
4. Practical Challenge—Content Dependency and Possible Approaches to Its Analysis
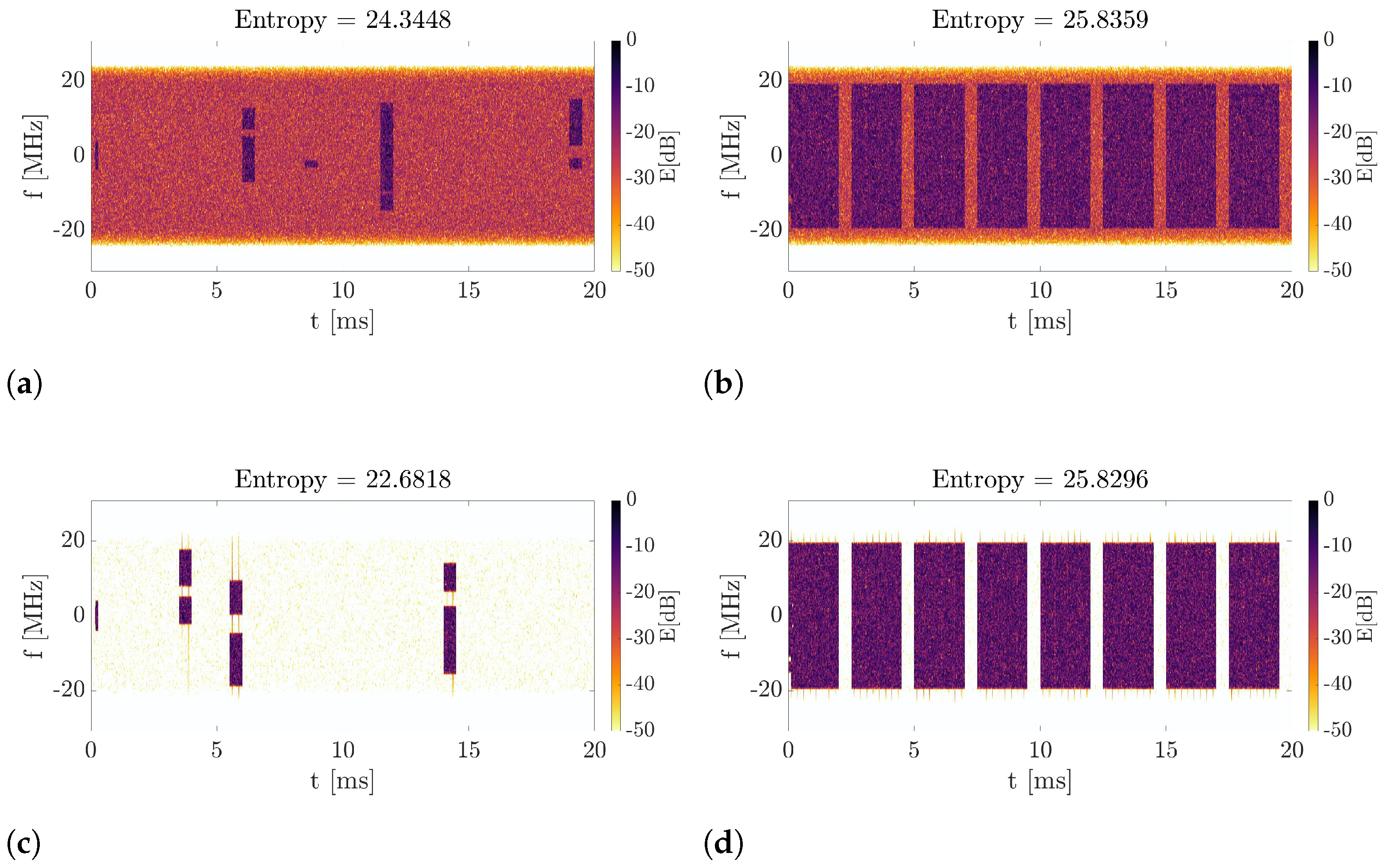
4.1. Spectrum Analysis
4.2. Power Measurement
4.3. Root-Mean-Square Signal Bandwidth
5. Rényi Entropy for 5G Signal Analysis
5.1. Theory
5.2. Rationale behind the Use of the Rényi Entropy for Drone Detection
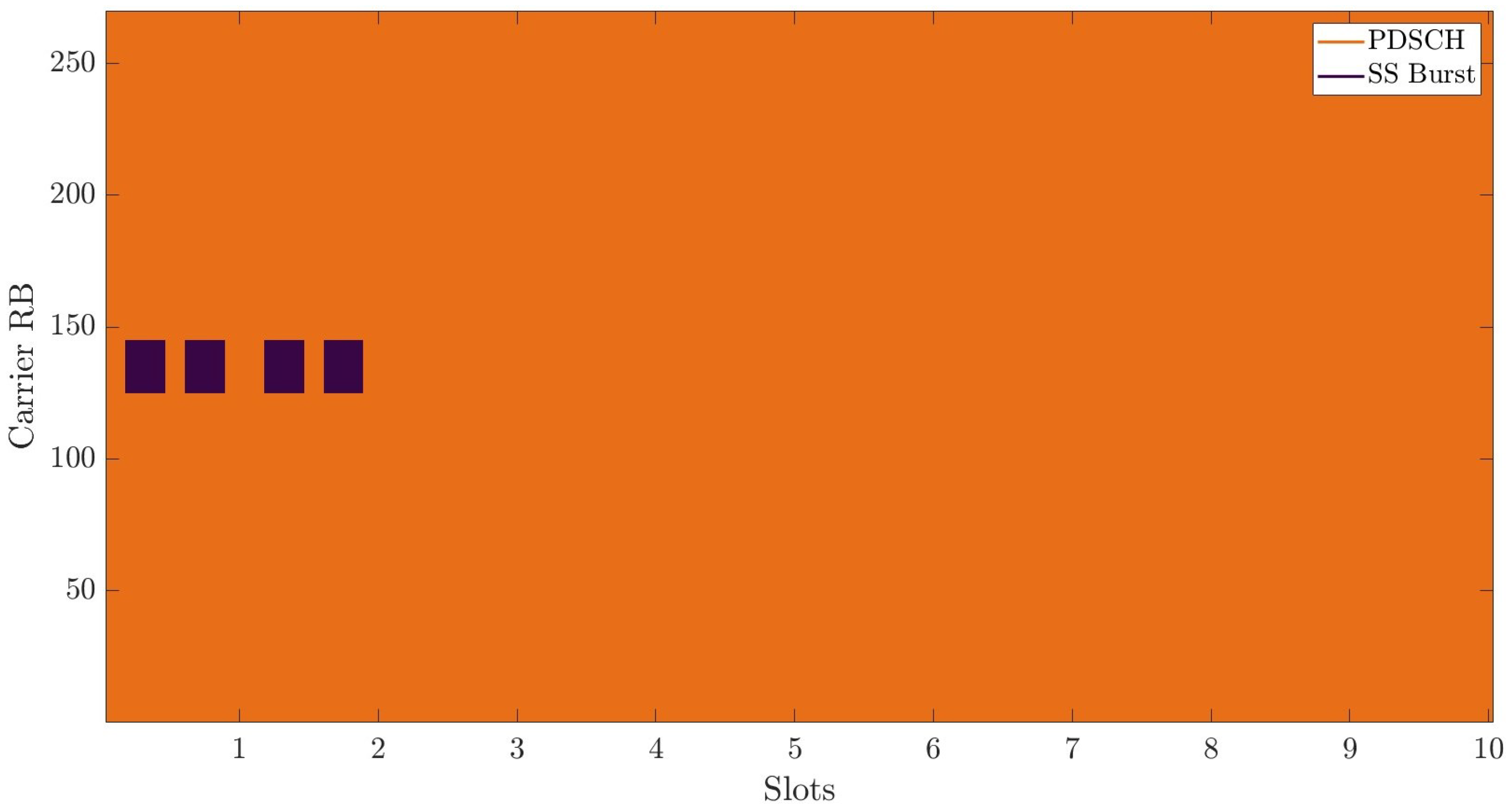
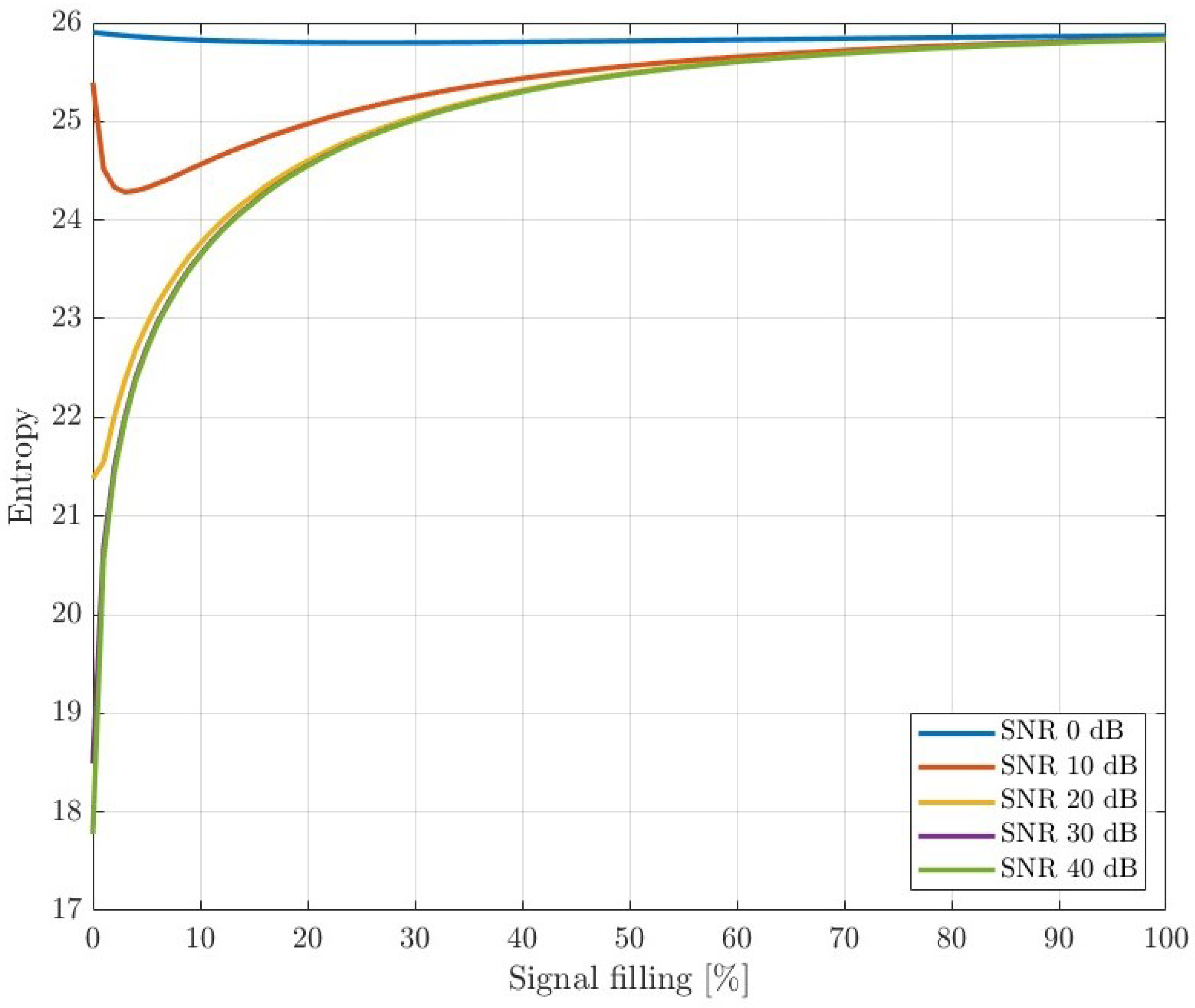
- Calibration (if possible)—record the 5G signal with the maximum allocation of resources. In civilian systems, this is easy to meet and comes down to the load on the network by downloading large amounts of data (e.g., large files) using one or more 5G mobile terminals. As a result, the base station will use the possible resources allowing the maximum entropy value to be assessed. In the case where calibration with the use of terminals is not possible, one should constantly verify the received signal and analyze the maximum value of entropy on an ongoing basis, indicating the use of a large number of resources.
- Signal reception—the signal is received continuously in the same way as a typical passive radar.
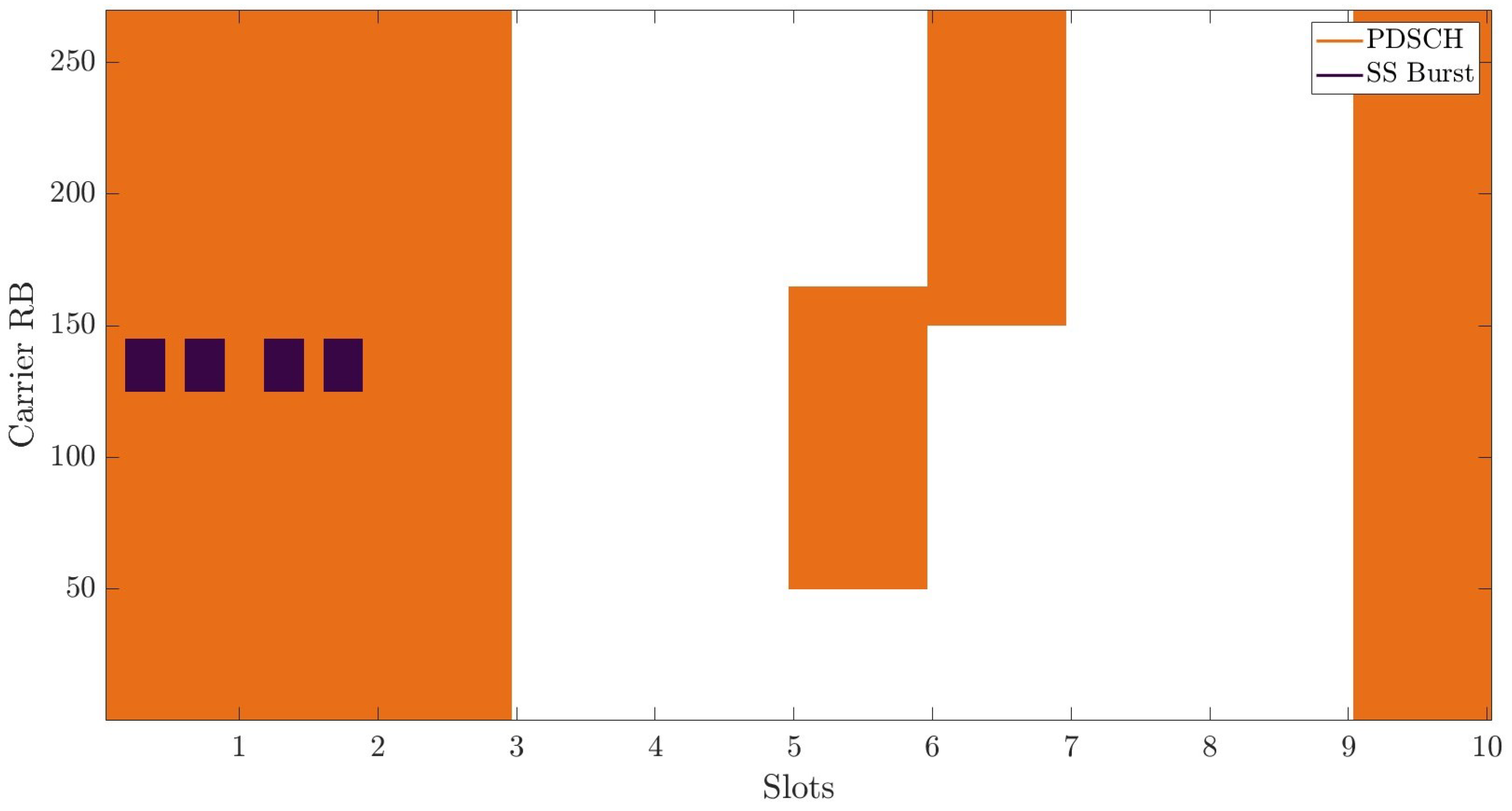
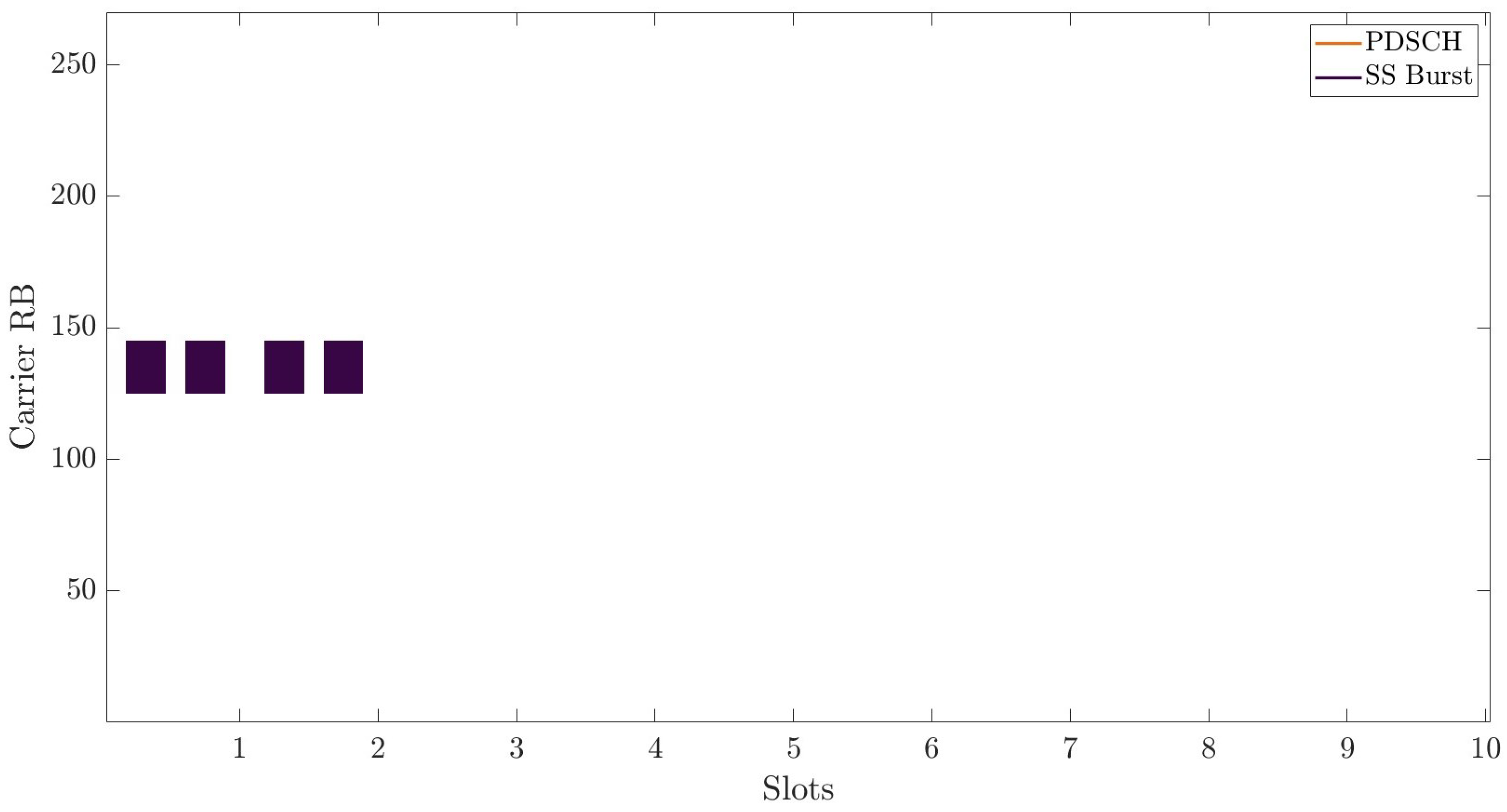
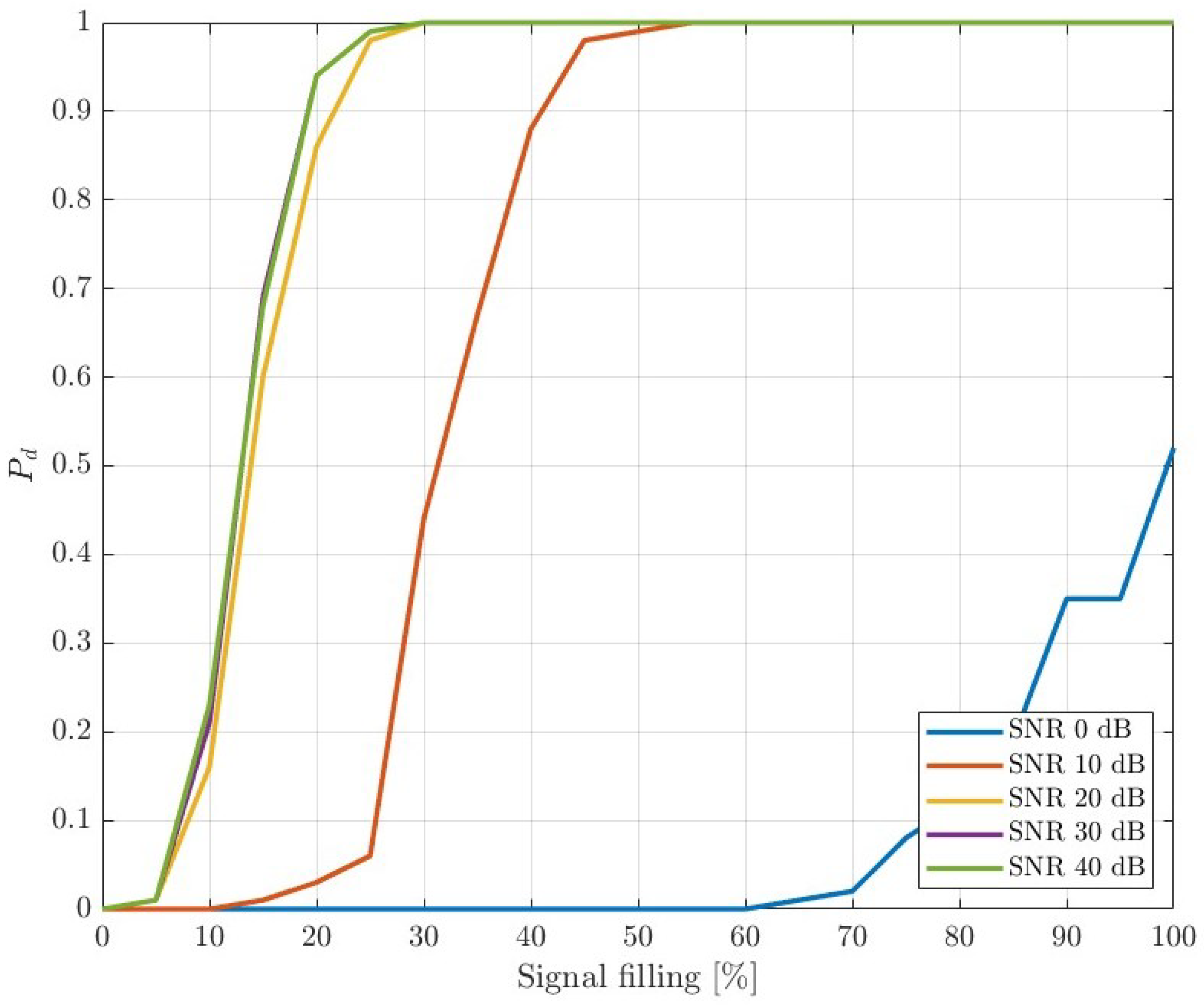
- Useful signal extraction—the signal is analyzed in terms of resource allocation by the 5G network. Only those fragments of the signal that meet the adopted condition for the Rényi entropy level are selected (e.g., signal frames with a filling exceeding of the maximum entropy value).
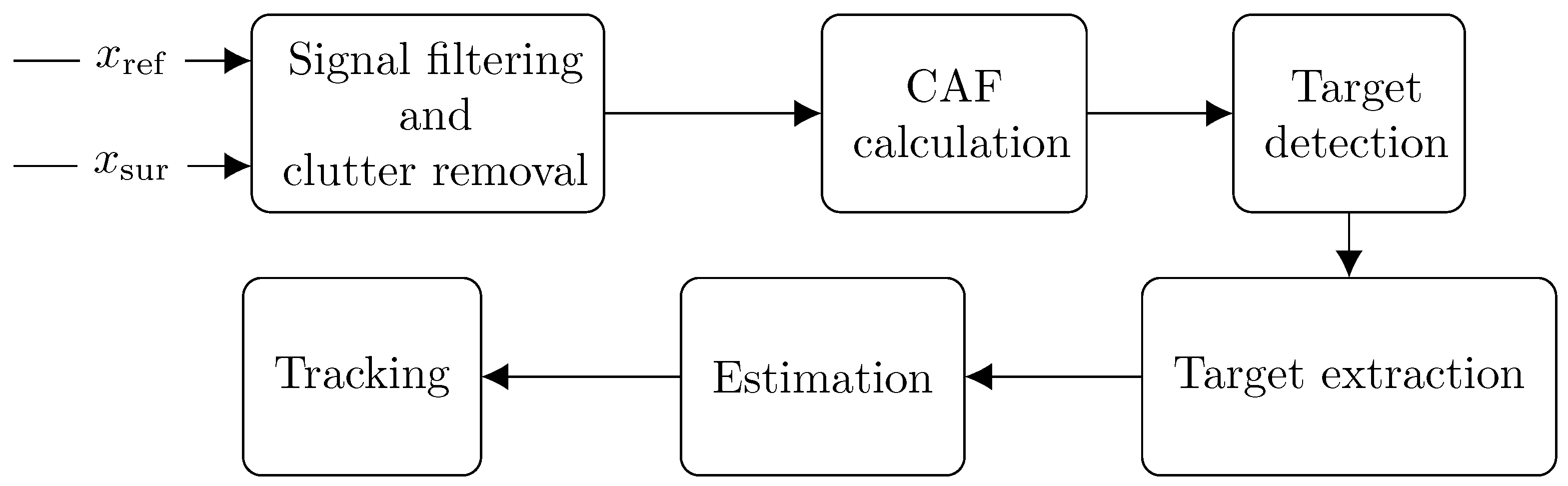
- Passive radar processing—classical target detection, as shown in Figure 2.
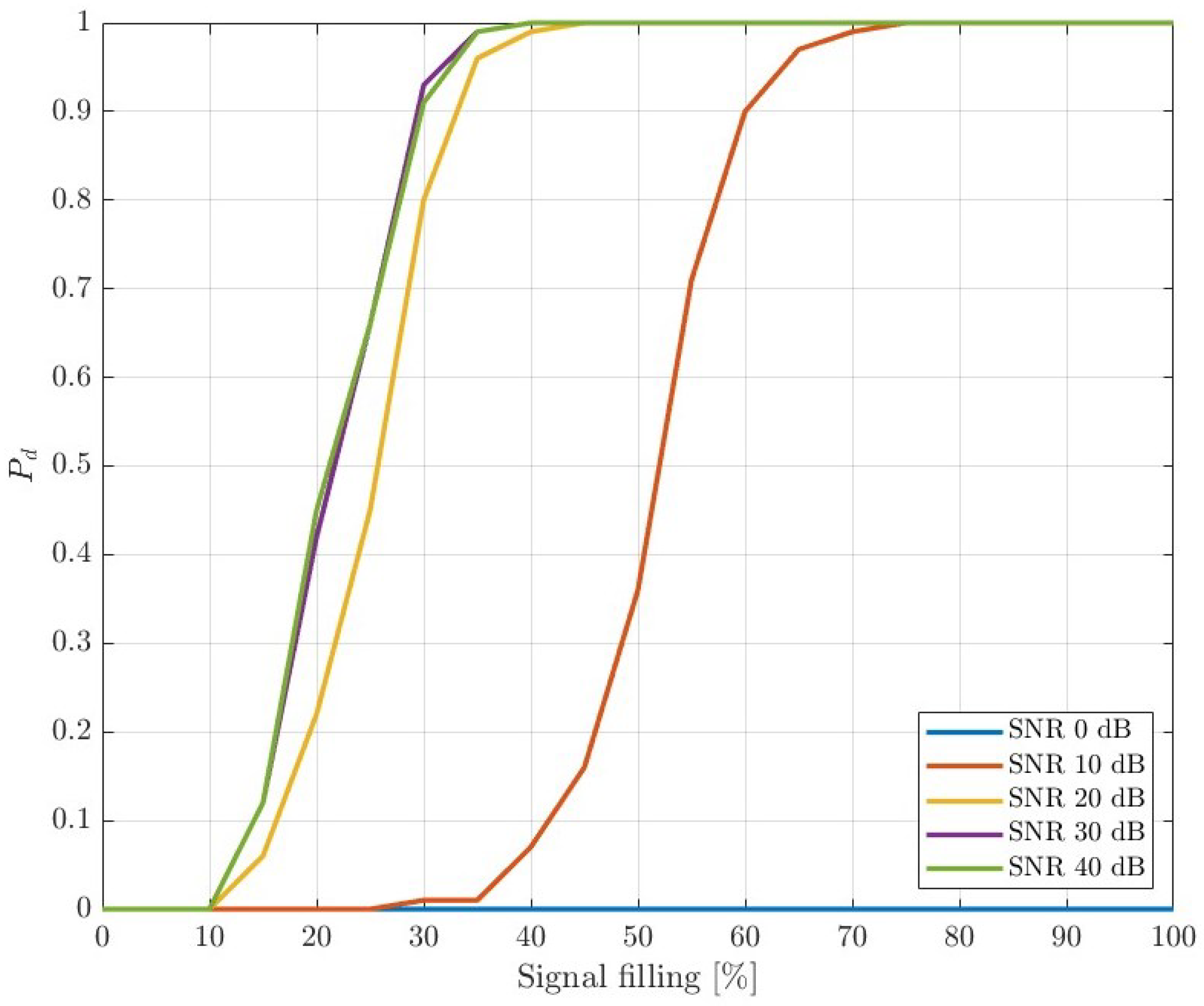
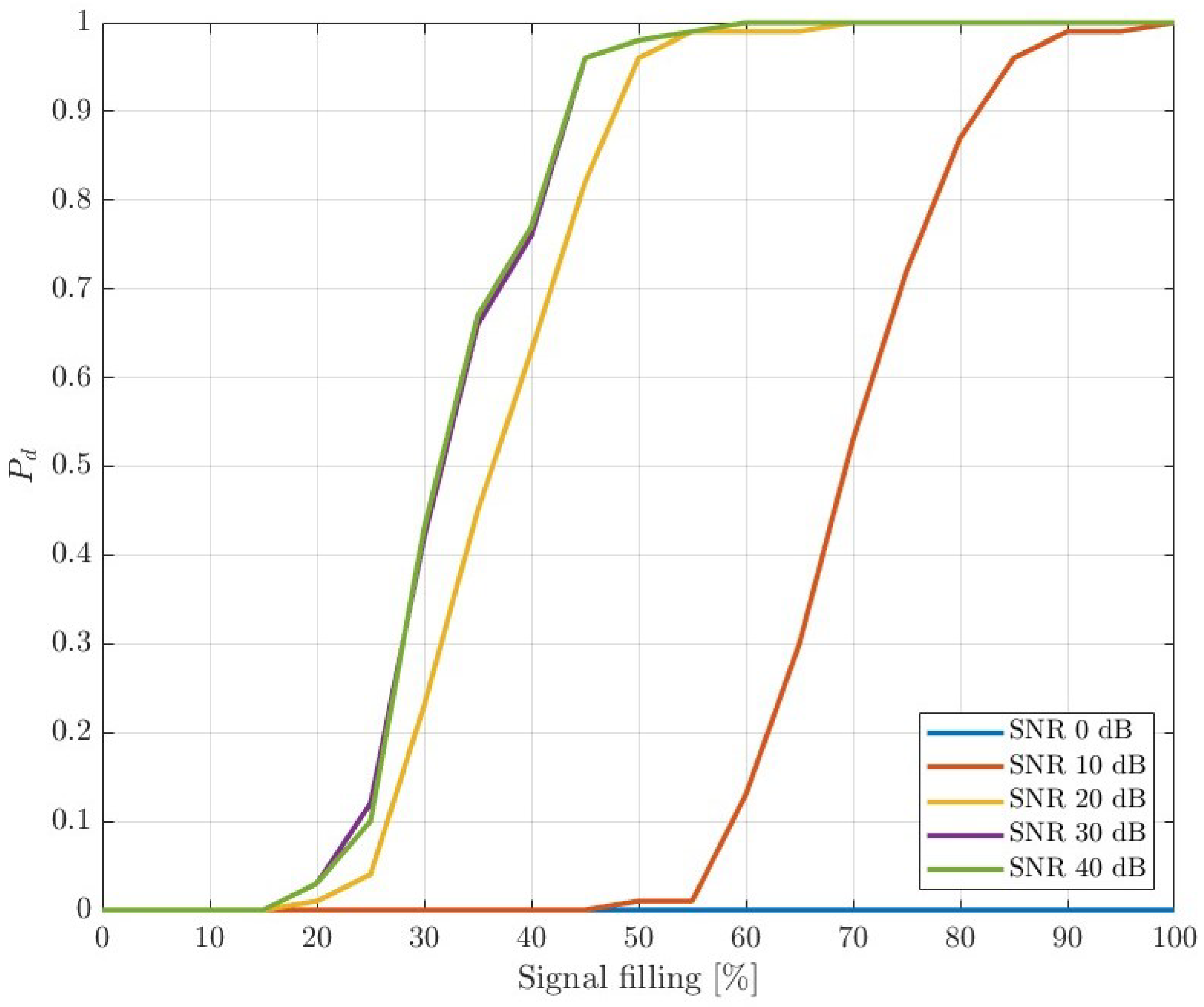
6. Simulations
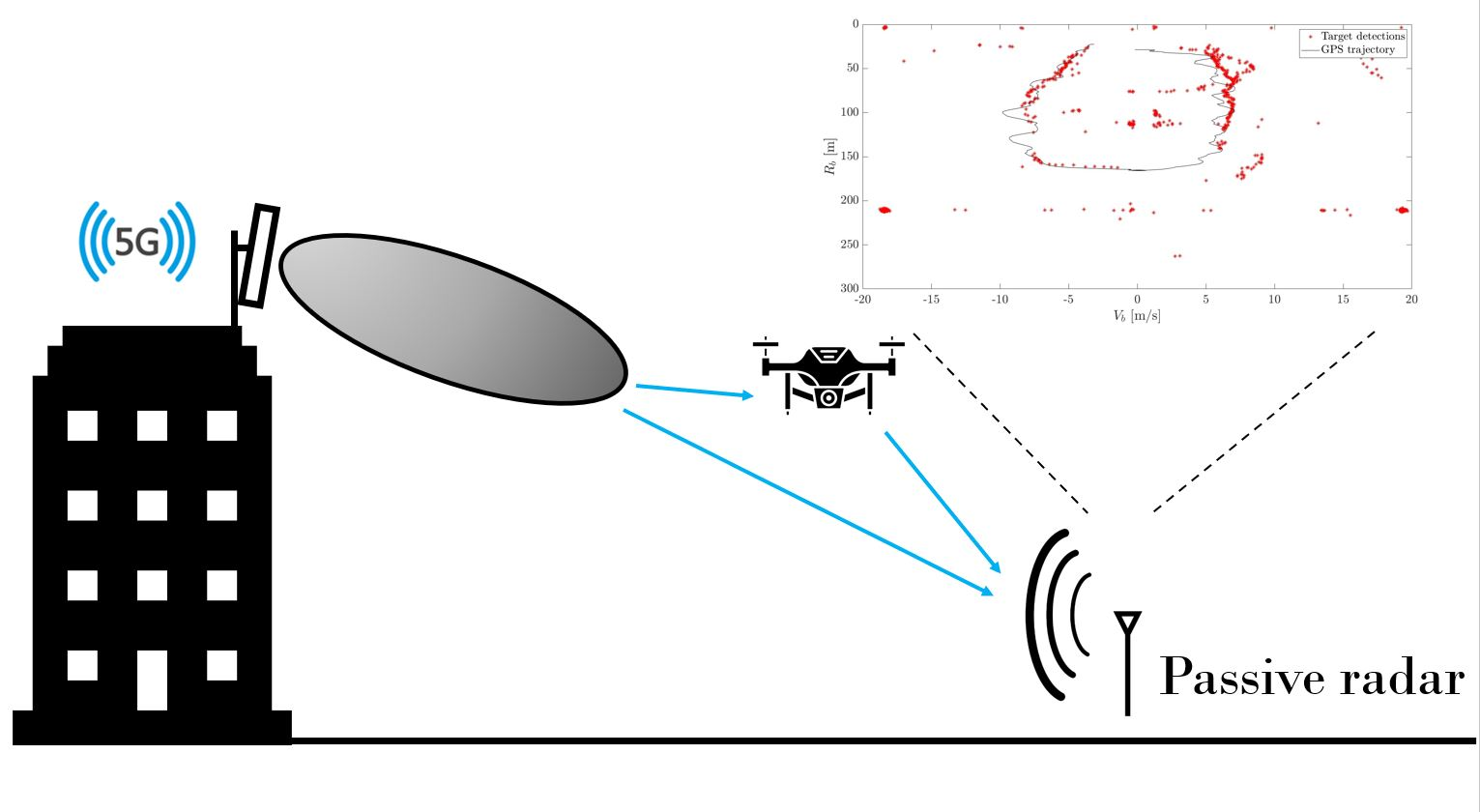
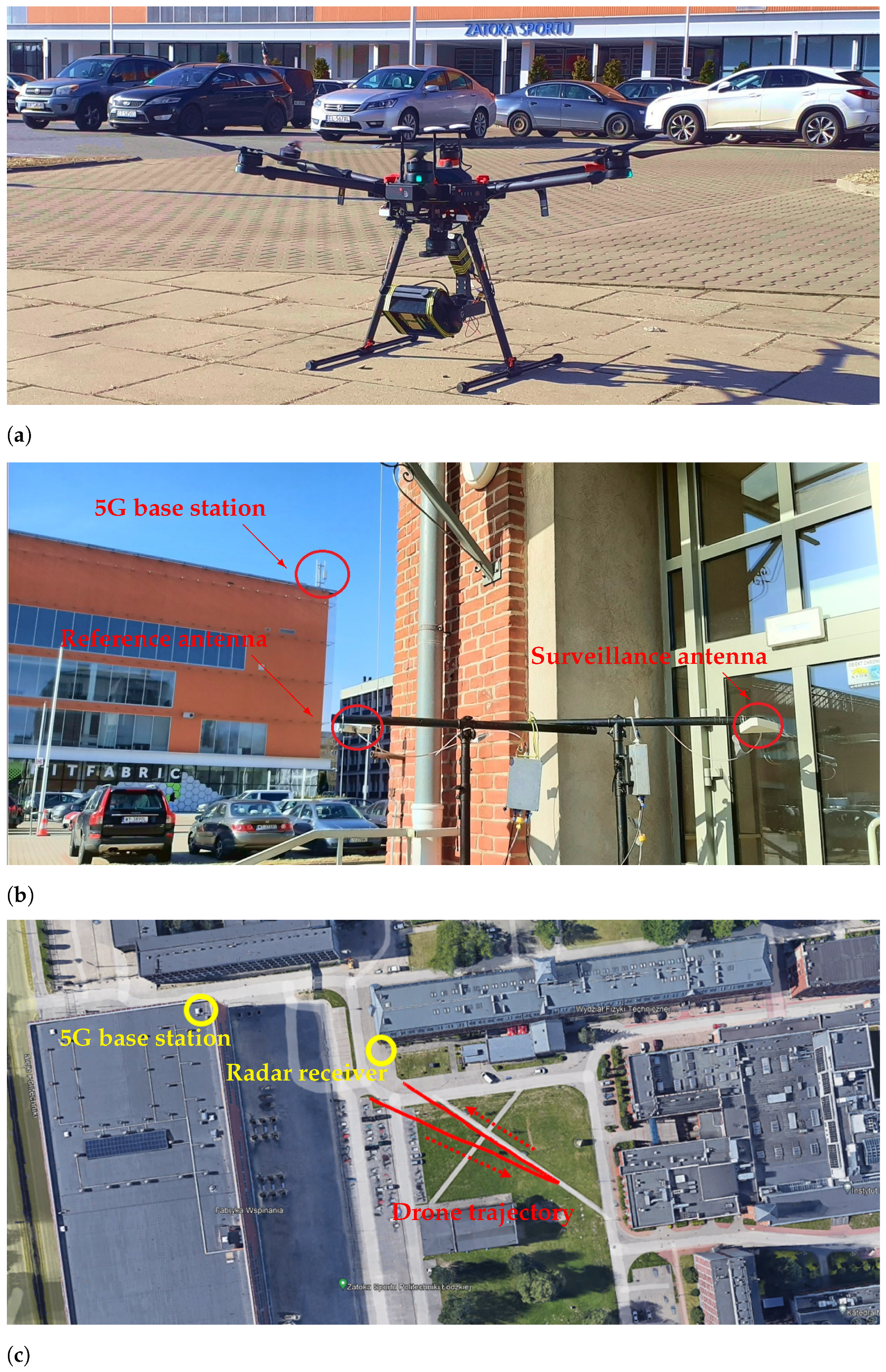
7. Drone Detection
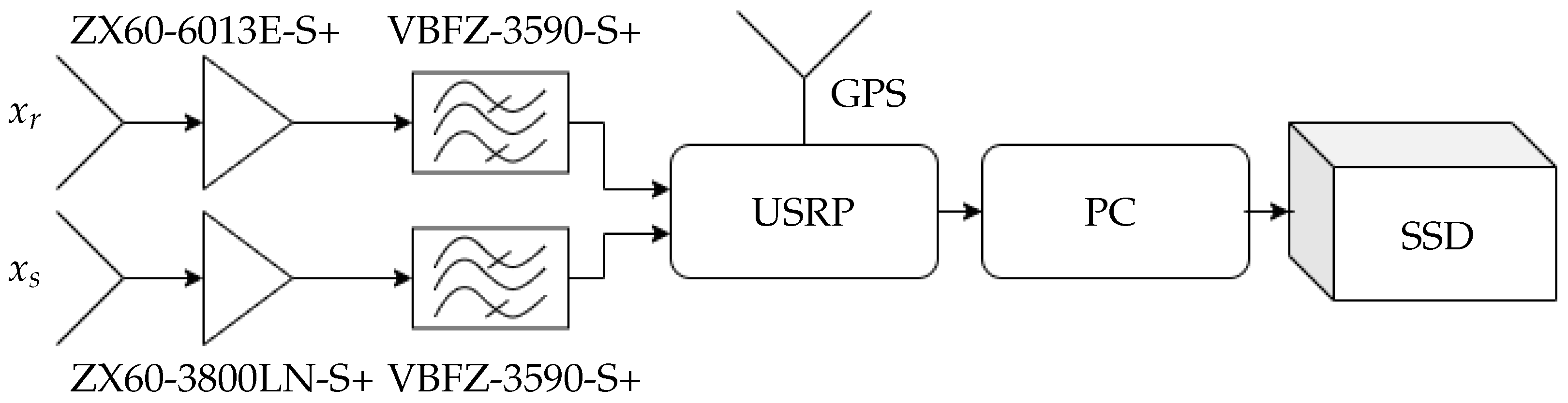
7.1. Experiment Description
7.2. Results
8. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Filippini, F.; Martelli, T.; Colone, F.; Cardinali, R. Exploiting long coherent integration times in DVB-T based passive radar systems. In Proceedings of the 2019 IEEE Radar Conference (RadarConf), Boston, MA, USA, 22–26 April 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Mazurek, G.; Kulpa, K.; Malanowski, M.; Droszcz, A. Experimental Seaborne Passive Radar. Sensors 2021, 21, 2171. [Google Scholar] [CrossRef]
- Raja Abdullah, R.S.A.; Alhaji Musa, S.; Abdul Rashid, N.E.; Sali, A.; Salah, A.A.; Ismail, A. Passive Forward-Scattering Radar Using Digital Video Broadcasting Satellite Signal for Drone Detection. Remote Sens. 2020, 12, 3075. [Google Scholar] [CrossRef]
- Santi, F.; Blasone, G.P.; Pastina, D.; Colone, F.; Lombardo, P. Parasitic Surveillance Potentialities Based on a GEO-SAR Illuminator. Remote Sens. 2021, 13, 4817. [Google Scholar] [CrossRef]
- Shao, Y.; Ma, H.; Zhou, S.; Wang, X.; Antoniou, M.; Liu, H. Target Localization Based on Bistatic T/R Pair Selection in GNSS-Based Multistatic Radar System. Remote Sens. 2021, 13, 707. [Google Scholar] [CrossRef]
- Zhang, C.; Wu, Y.; Wang, J.; Luo, Z. FM-based multi-frequency passive radar system. In Proceedings of the 2016 IEEE International Conference on Signal Processing, Communications and Computing (ICSPCC), Hong Kong, China, 5–8 August 2016; pp. 1–4. [Google Scholar] [CrossRef]
- Hennessy, B.; Rutten, M.; Young, R.; Tingay, S.; Summers, A.; Gustainis, D.; Crosse, B.; Sokolowski, M. Establishing the Capabilities of the Murchison Widefield Array as a Passive Radar for the Surveillance of Space. Remote Sens. 2022, 14, 2571. [Google Scholar] [CrossRef]
- Mazurek, G. DAB Signal Preprocessing for Passive Coherent Location. Sensors 2022, 22, 378. [Google Scholar] [CrossRef] [PubMed]
- Samczyński, P.; Abratkiewicz, K.; Płotka, M.; Zieliński, T.P.; Wszołek, J.; Hausman, S.; Korbel, P.; Księżyk, A. 5G Network-Based Passive Radar. IEEE Trans. Geosci. Remote Sens. 2022, 60, 1–9. [Google Scholar] [CrossRef]
- Wang, H.; Lyu, X.; Liao, K. Co-Channel Interference Suppression for LTE Passive Radar Based on Spatial Feature Cognition. Sensors 2022, 22, 117. [Google Scholar] [CrossRef] [PubMed]
- Sayin, A.; Cherniakov, M.; Antoniou, M. Passive radar using Starlink transmissions: A theoretical study. In Proceedings of the 2019 20th International Radar Symposium (IRS), Ulm, Germany, 26–28 June 2019; pp. 1–7. [Google Scholar] [CrossRef]
- Gomez-del Hoyo, P.; Gronowski, K.; Samczynski, P. The STARLINK-based passive radar: Preliminary study and first illuminator signal measurements. In Proceedings of the 24th International Microwave and Radar Conference (MIKON), Gdansk, Poland, 9–12 May 2022. [Google Scholar]
- Blázquez-García, R.; Ummenhofer, M.; Cristallini, D.; O’Hagan, D. Passive Radar Architecture based on Broadband LEO Communication Satellite Constellations. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Thoma, R.S.; Andrich, C.; Galdo, G.D.; Dobereiner, M.; Hein, M.A.; Kaske, M.; Schafer, G.; Schieler, S.; Schneider, C.; Schwind, A.; et al. Cooperative Passive Coherent Location: A Promising 5G Service to Support Road Safety. IEEE Commun. Mag. 2019, 57, 86–92. [Google Scholar] [CrossRef] [Green Version]
- Baquero Barneto, C.; Riihonen, T.; Turunen, M.; Anttila, L.; Fleischer, M.; Stadius, K.; Ryynänen, J.; Valkama, M. Full-Duplex OFDM Radar With LTE and 5G NR Waveforms: Challenges, Solutions, and Measurements. IEEE Trans. Microw. Theory Tech. 2019, 67, 4042–4054. [Google Scholar] [CrossRef] [Green Version]
- Zhao, J.; Fu, X.; Yang, Z.; Xu, F. Radar-Assisted UAV Detection and Identification Based on 5G in the Internet of Things. Wirel. Commun. Mob. Comput. 2019, 2019, 2850263. [Google Scholar] [CrossRef] [Green Version]
- Ai, X.; Zhang, L.; Zheng, Y.; Zhao, F. Passive Detection Experiment of UAV Based on 5G New Radio Signal. In Proceedings of the 2021 Photonics Electromagnetics Research Symposium (PIERS), Prague, Czech Republic, 3–6 July 2021; pp. 2124–2129. [Google Scholar] [CrossRef]
- Rzewuski, S.; Kulpa, K.; Samczyński, P. Duty factor impact on WIFIRAD radar image quality. In Proceedings of the 2015 IEEE Radar Conference, Arlington, VA, USA, 10–15 May 2015; pp. 400–405. [Google Scholar] [CrossRef]
- Colone, F.; Woodbridge, K.; Guo, H.; Mason, D.; Baker, C.J. Ambiguity Function Analysis of Wireless LAN Transmissions for Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 240–264. [Google Scholar] [CrossRef]
- Falcone, P.; Colone, F.; Lombardo, P. Potentialities and challenges of WiFi-based passive radar. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 15–26. [Google Scholar] [CrossRef]
- Żywek, M.; Malanowski, M. Real-Time Selection of FM Transmitter in Passive Bistatic Radar Based on Short-Term Bandwidth Analysis. In Proceedings of the 2021 21st International Radar Symposium (IRS), Virtual Conference, 21–22 June 2021; pp. 1–10. [Google Scholar] [CrossRef]
- Olsen, K.E.; Baker, C.J. FM-based Passive Bistatic Radar as a function of available bandwidth. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; p. 10426070. [Google Scholar] [CrossRef]
- Malanowski, M. Signal Processing for Passive Bistatic Radar; Artech House: Norwood, MA, USA, 2019. [Google Scholar]
- Malanowski, M.; Kulpa, K. Digital beamforming for Passive Coherent Location radar. In Proceedings of the 2008 IEEE Radar Conference, Rome, Italy, 26–30 May 2008; p. 10426046. [Google Scholar] [CrossRef]
- Kulpa, K. The CLEAN type algorithms for radar signal processing. In Proceedings of the 2008 Microwaves, Radar and Remote Sensing Symposium, Kiev, Ukraine, 22–24 September 2008; pp. 152–157. [Google Scholar] [CrossRef]
- Palmer, J.E.; Searle, S.J. Evaluation of adaptive filter algorithms for clutter cancellation in Passive Bistatic Radar. In Proceedings of the 2012 IEEE Radar Conference, Atlanta, GA, USA, 7–11 May 2012; pp. 0493–0498. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 608–621. [Google Scholar] [CrossRef]
- Szczepankiewicz, K.; Malanowski, M.; Szczepankiewicz, M. Passive Radar Parallel Processing Using General-Purpose Computing on Graphics Processing Units. Int. J. Electron. Telecommun. 2015, 61, 357–363. [Google Scholar] [CrossRef] [Green Version]
- Nalecz, M.; Kulpa, K. Range and azimuth estimation using raw data in DSP-based radar system. In Proceedings of the 12th International Conference on Microwaves and Radar. MIKON-98. Conference Proceedings (IEEE Cat. No.98EX195), Krakow, Poland, 20–22 May 1998; Volume 3, pp. 871–875. [Google Scholar] [CrossRef]
- Fränken, D.; Zeeb, O. Tracking and data fusion with the Hensoldt Passive Radar System. In Proceedings of the 2018 22nd International Microwave and Radar Conference (MIKON), Poznan, Poland, 14–17 May 2018; pp. 404–407. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K. Two Methods for Target Localization in Multistatic Passive Radar. IEEE Trans. Aerosp. Electron. Syst. 2012, 48, 572–580. [Google Scholar] [CrossRef]
- 3GPP. 3GPP Specification Series. 2022. Available online: https://www.3gpp.org/DynaReport/38-series.htm (accessed on 5 August 2022).
- ETSI. 5G NR Physical Channels and Modulation; Standard Version 16.2.0; ETSI: Sophia Antipolis, France, 2020. [Google Scholar]
- Zhang, J.A.; Rahman, M.L.; Wu, K.; Huang, X.; Guo, Y.J.; Chen, S.; Yuan, J. Enabling Joint Communication and Radar Sensing in Mobile Networks—A Survey. IEEE Commun. Surv. Tutor. 2022, 24, 306–345. [Google Scholar] [CrossRef]
- Abratkiewicz, K.; Płotka, M.; Samczyński, P.; Wszołek, J.; Zieliński, T.P. SSB-based Signal Processing for Passive Radar Using a 5G Network. IEEE Trans. Aerosp. Electron. Syst. 2022; under review. [Google Scholar]
- Ergen, M. Mobile Broadband—Including WiMAX and LTE, 1st ed.; Springer Publishing Company, Incorporated: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Boashash, B. Time–Frequency Signal Analysis and Processing: A Comprehensive Reference; Elsevier Science: Amsterdam, The Netherlands, 2015. [Google Scholar]
- Baraniuk, R.G.; Flandrin, P.; Janssen, A.J.E.M.; Michel, O.J.J. Measuring time–frequency information content using the Renyi entropies. IEEE Trans. Inf. Theory 2001, 47, 1391–1409. [Google Scholar] [CrossRef] [Green Version]
- Bačnar, D.; Saulig, N.; Petrijevčanin V., I.; Lerga, J. Entropy-Based Concentration and Instantaneous Frequency of TFDs from Cohen’s, Affine, and Reassigned Classes. Sensors 2022, 22, 3727. [Google Scholar] [CrossRef]
- Williams, W.J.; Brown, M.L.; Hero, A.O., III. Uncertainty, information, and time–frequency distributions. In Proceedings of the Advanced Signal Processing Algorithms, Architectures, and Implementations II, San Diego, CA, USA, 24–26 July 1991; Luk, F.T., Ed.; International Society for Optics and Photonics, SPIE: Bellingham, WA, USA, 1991; Volume 1566, pp. 144–156. [Google Scholar] [CrossRef] [Green Version]
- Flandrin, P.; Baraniuk, R.; Michel, O. Time–frequency complexity and information. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Adelaide, Australia, 19–22 April 1994; Volume III, pp. III/329–III/332. [Google Scholar] [CrossRef] [Green Version]
- Williams, W. Reduced interference distributions: Biological applications and interpretations. Proc. IEEE 1996, 84, 1264–1280. [Google Scholar] [CrossRef]
- Sang, T.H.; Williams, W. Rényi information and signal-dependent optimal kernel design. In Proceedings of the 1995 International Conference on Acoustics, Speech, and Signal Processing, Detroit, MI, USA, 9–12 May 1995; Volume 2, pp. 997–1000. [Google Scholar] [CrossRef]
- Malanowski, M.; Kulpa, K.; Kulpa, J.; Samczynski, P.; Misiurewicz, J. Analysis of detection range of FM-based passive radar. IET Radar Sonar Navig. 2014, 8, 153–159. [Google Scholar] [CrossRef]
- Ezuma, M.; Anjinappa, C.K.; Funderburk, M.; Guvenc, I. Radar Cross Section Based Statistical Recognition of UAVs at Microwave Frequencies. IEEE Trans. Aerosp. Electron. Syst. 2022, 58, 27–46. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subcarrier Spacing | Number of Slots |
|---|---|
| 15 kHz | 1 |
| 30 kHz | 2 |
| 60 kHz | 4 |
| 120 kHz | 8 |
| 240 kHz | 16 |
| 480 kHz | 32 |
| 960 kHz | 64 |
| Name of the Parameter | Value |
|---|---|
| Center Frequency | GHz |
| EIRP () | 73 dBm |
| Receiver antenna gain | 10 dBi |
| Threshold | 11 dB |
| Integration time | 20 ms |
| Total losses | 10 dB |
| Effective noise temperature of the receiver | 493 K |
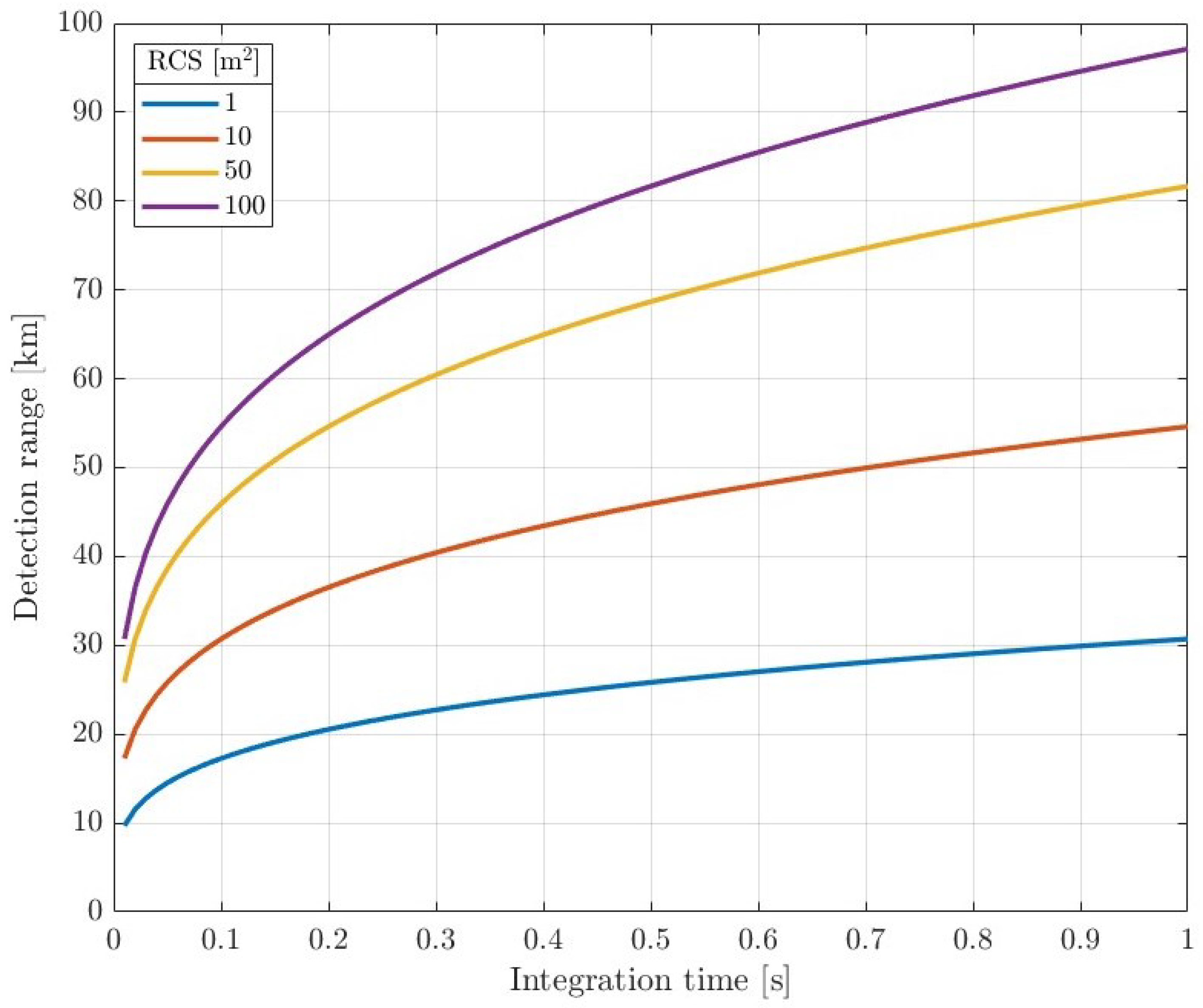
| Radar cross-section | 1, 10, 50, 100 m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Maksymiuk, R.; Abratkiewicz, K.; Samczyński, P.; Płotka, M. Rényi Entropy-Based Adaptive Integration Method for 5G-Based Passive Radar Drone Detection. Remote Sens. 2022, 14, 6146. https://doi.org/10.3390/rs14236146
Maksymiuk R, Abratkiewicz K, Samczyński P, Płotka M. Rényi Entropy-Based Adaptive Integration Method for 5G-Based Passive Radar Drone Detection. Remote Sensing. 2022; 14(23):6146. https://doi.org/10.3390/rs14236146
Chicago/Turabian StyleMaksymiuk, Radosław, Karol Abratkiewicz, Piotr Samczyński, and Marek Płotka. 2022. "Rényi Entropy-Based Adaptive Integration Method for 5G-Based Passive Radar Drone Detection" Remote Sensing 14, no. 23: 6146. https://doi.org/10.3390/rs14236146