
Magnetization Vector Inversion Based on Amplitude and Gradient Constraints


Abstract
:
1. Introduction
2. Methods
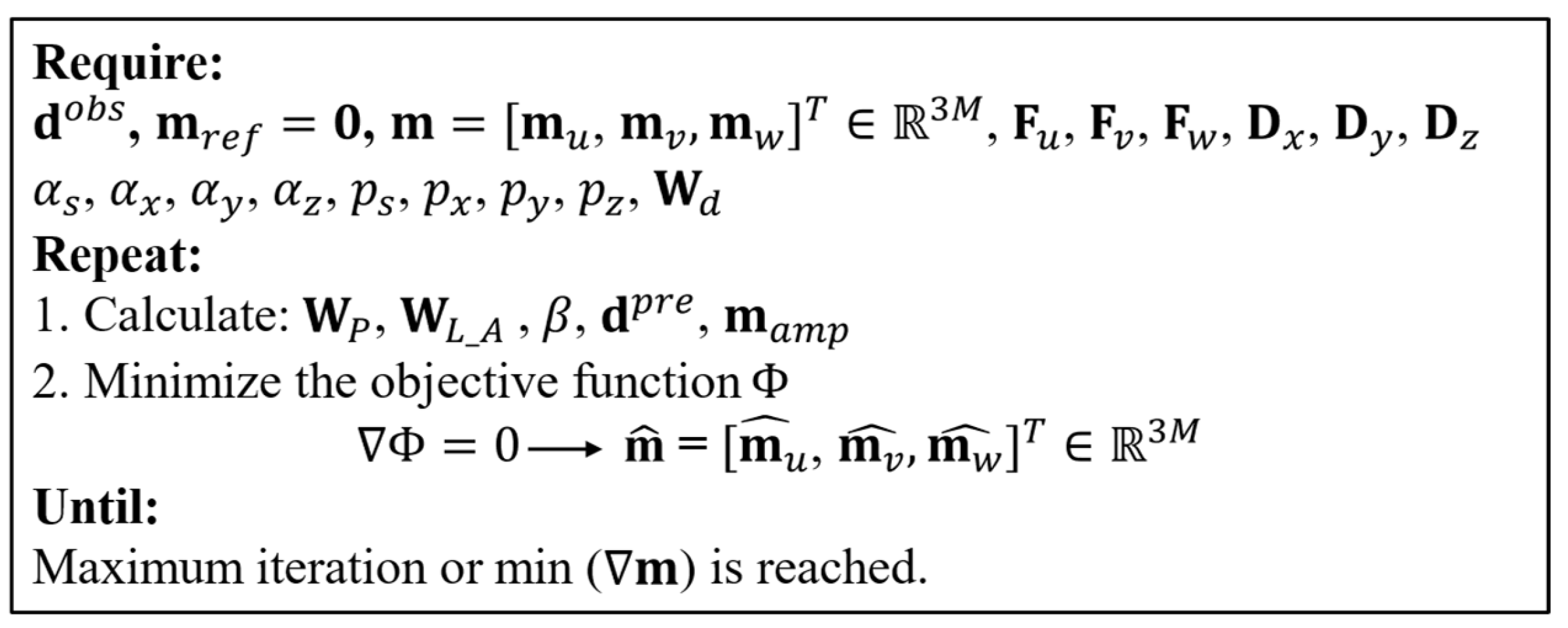
2.1. Amplitude and Gradient Constraints Based Magnetization Vector Inversion
2.2. Evaluation Index of Inversion
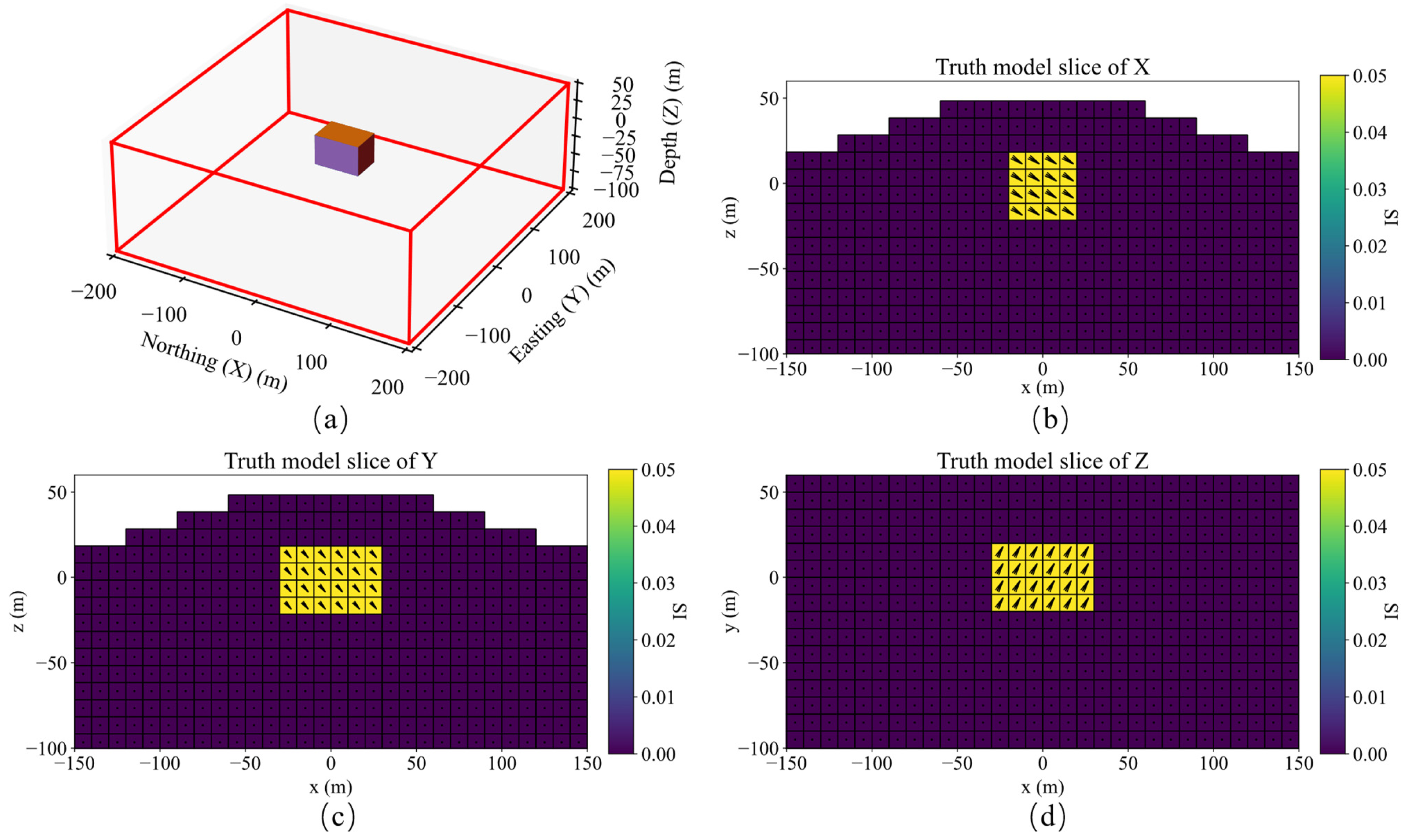
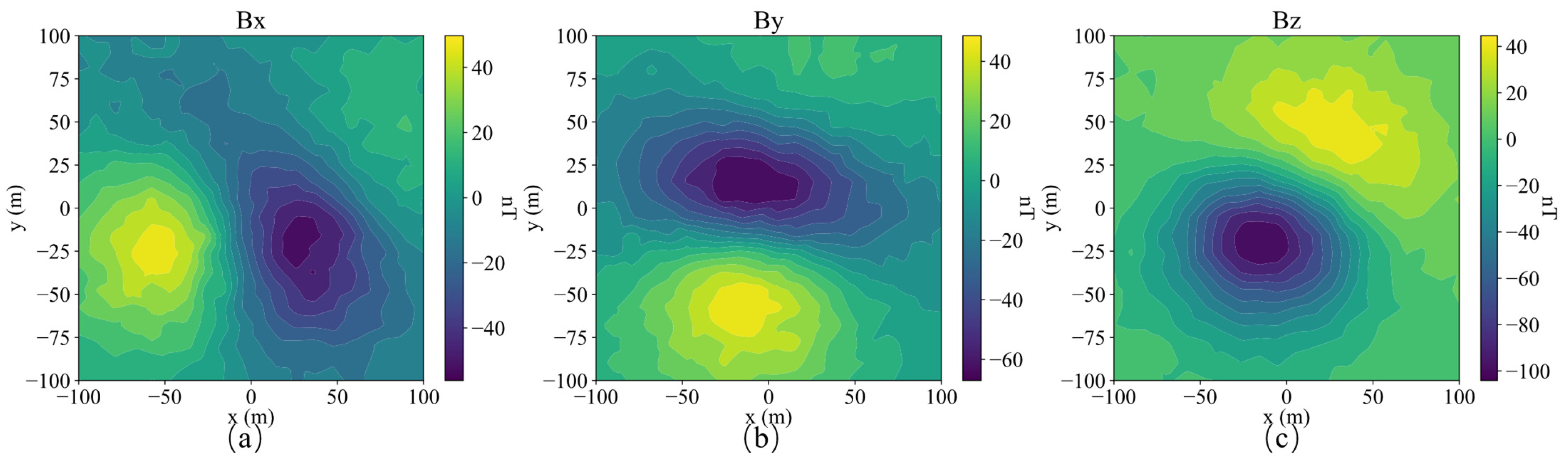
3. Inversion of Synthetic Data
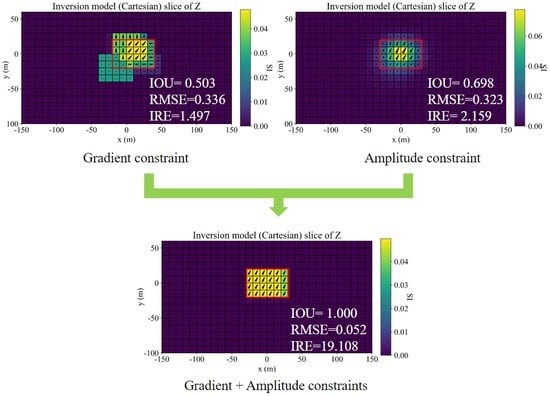
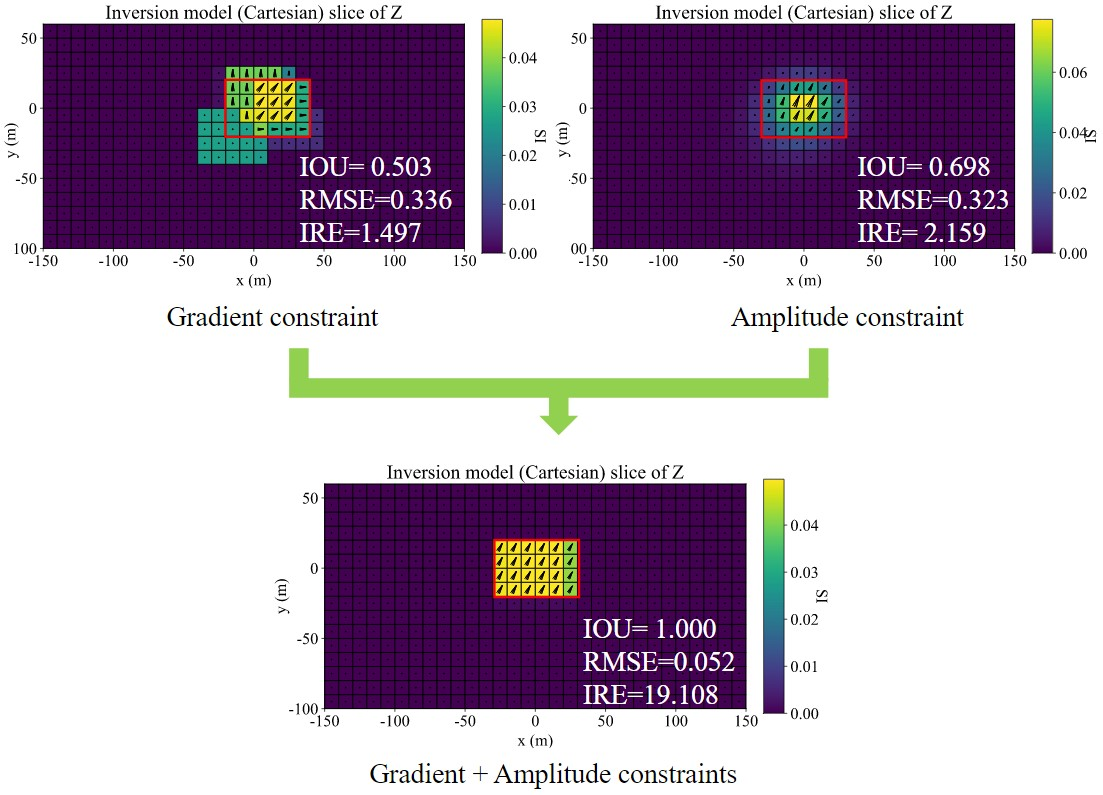
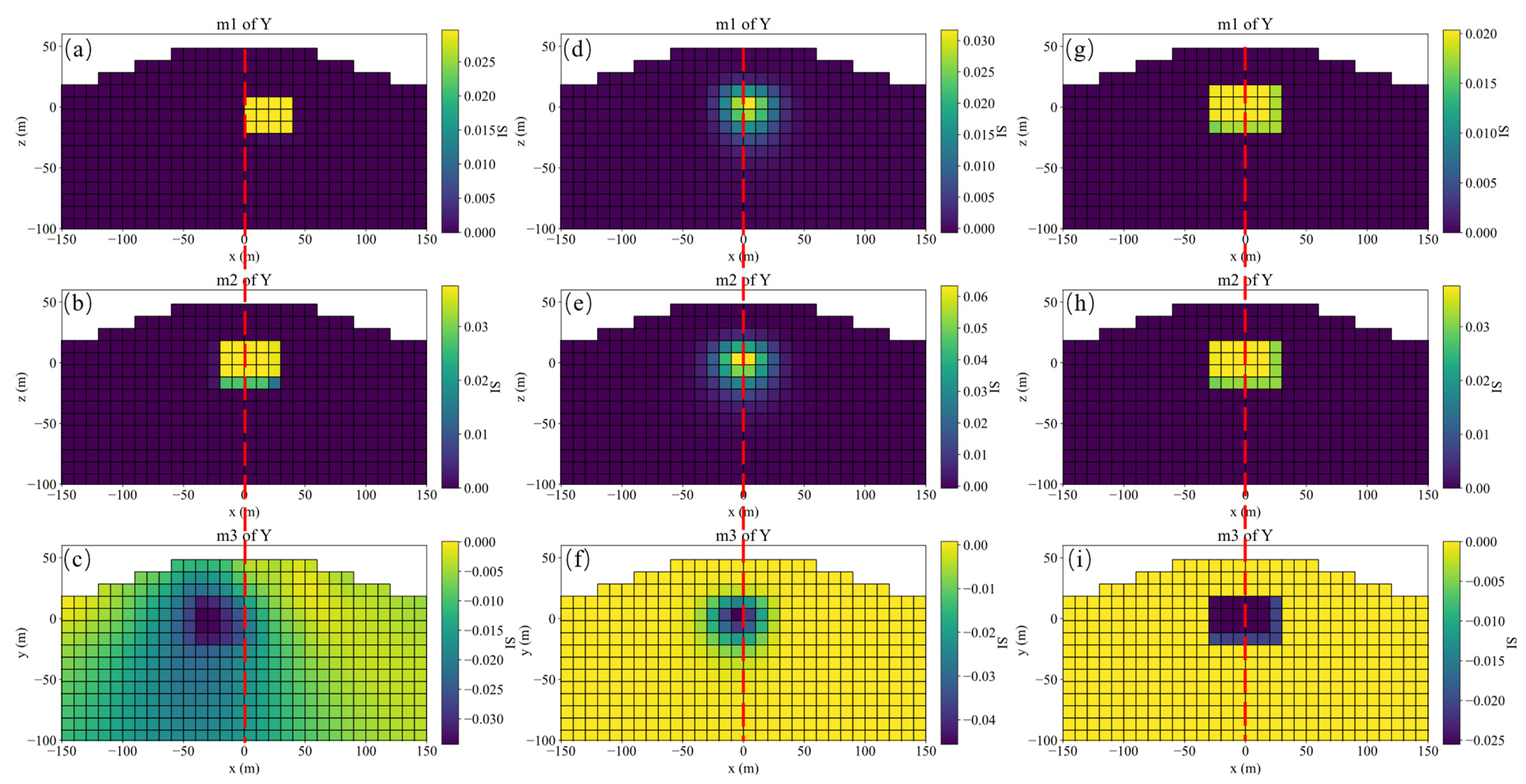
3.1. Comparison of Evaluation Effect of , and
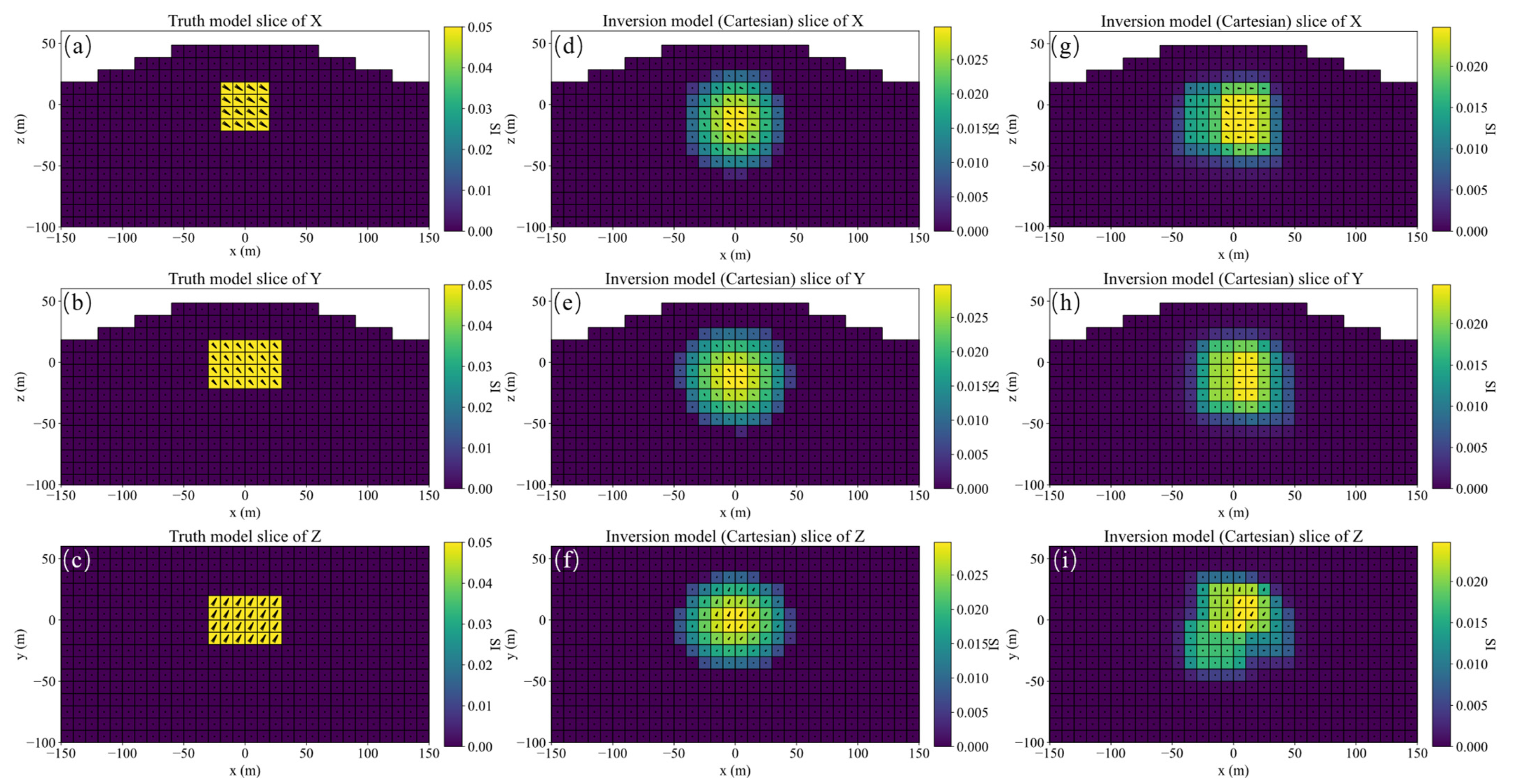
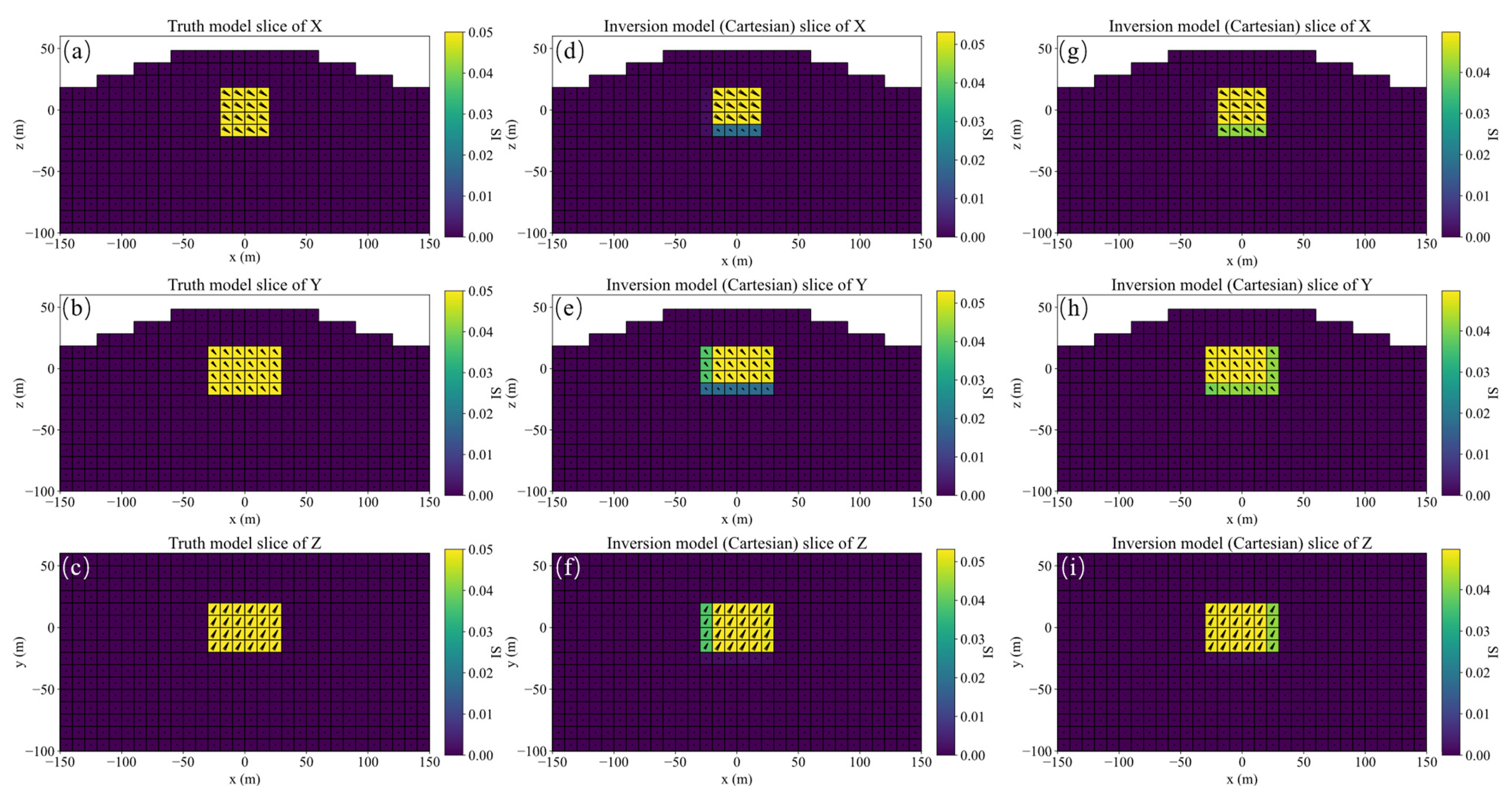
3.2. Comparison of Different Inversion Methods for Single Model
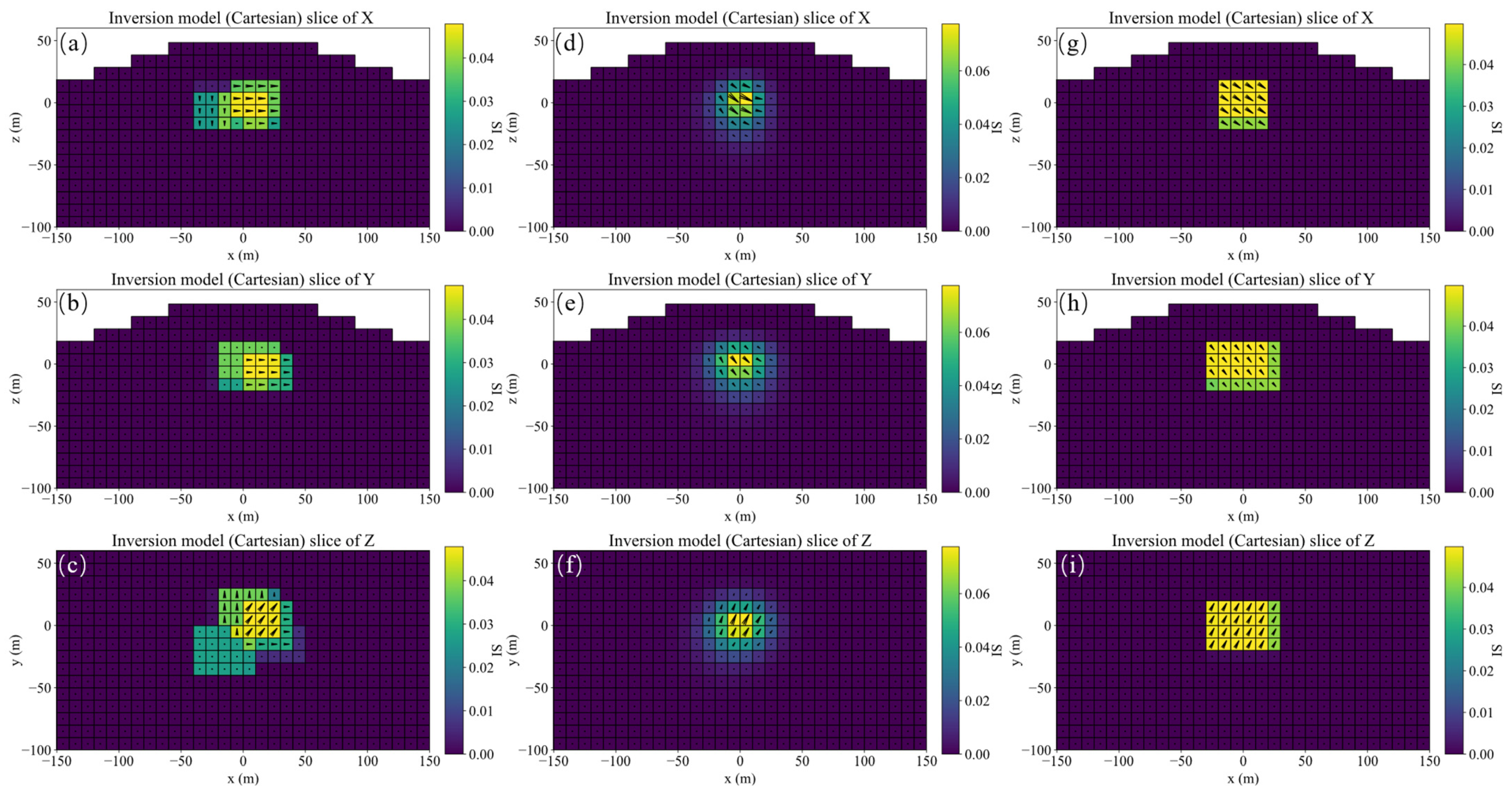
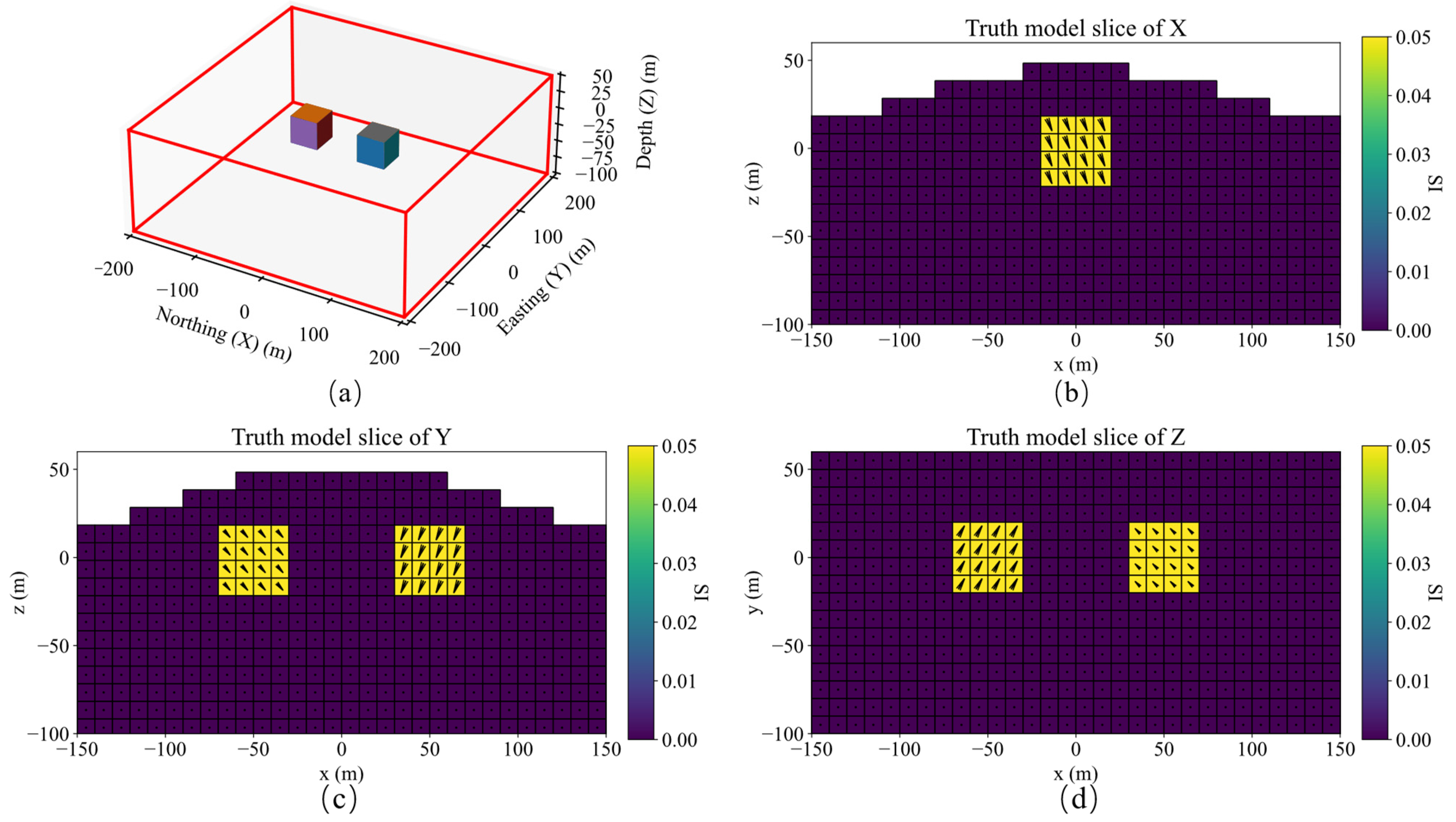
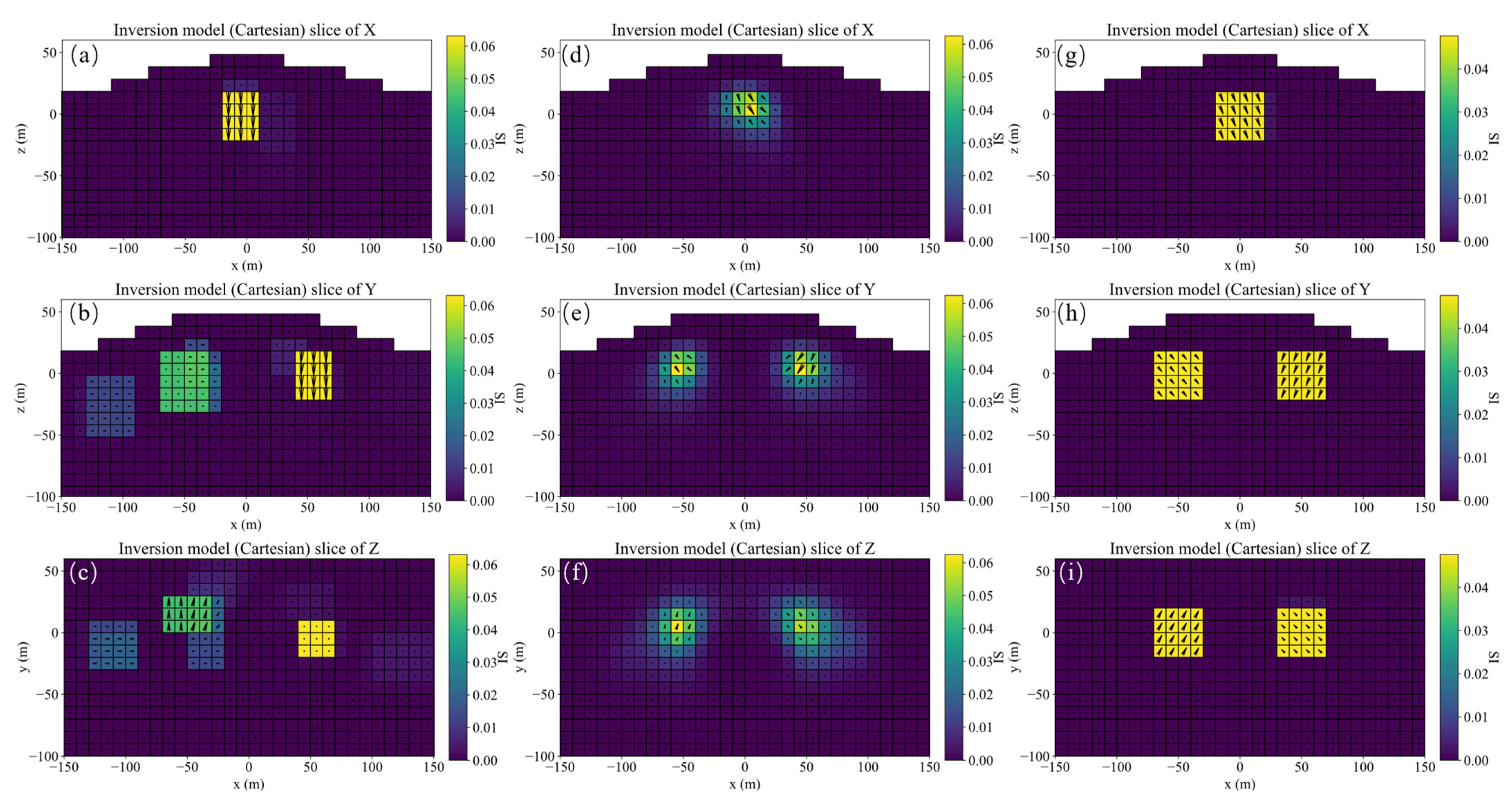
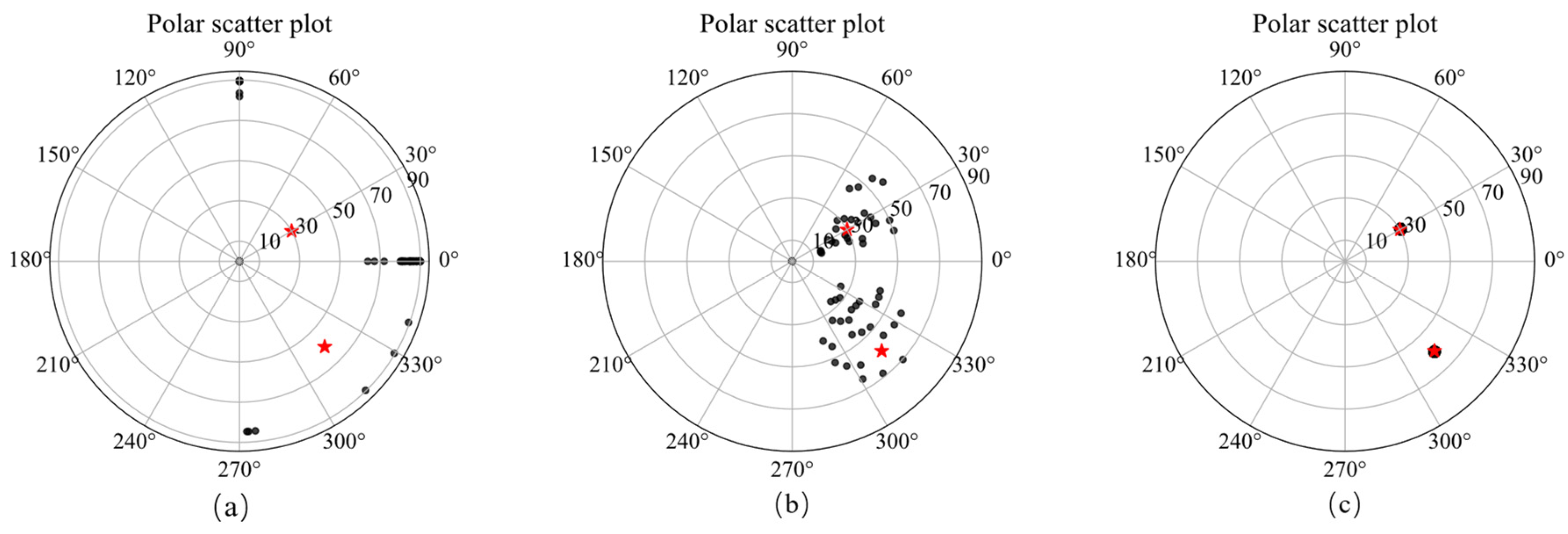
3.3. Comparison of Different Inversion Methods for Dual Models
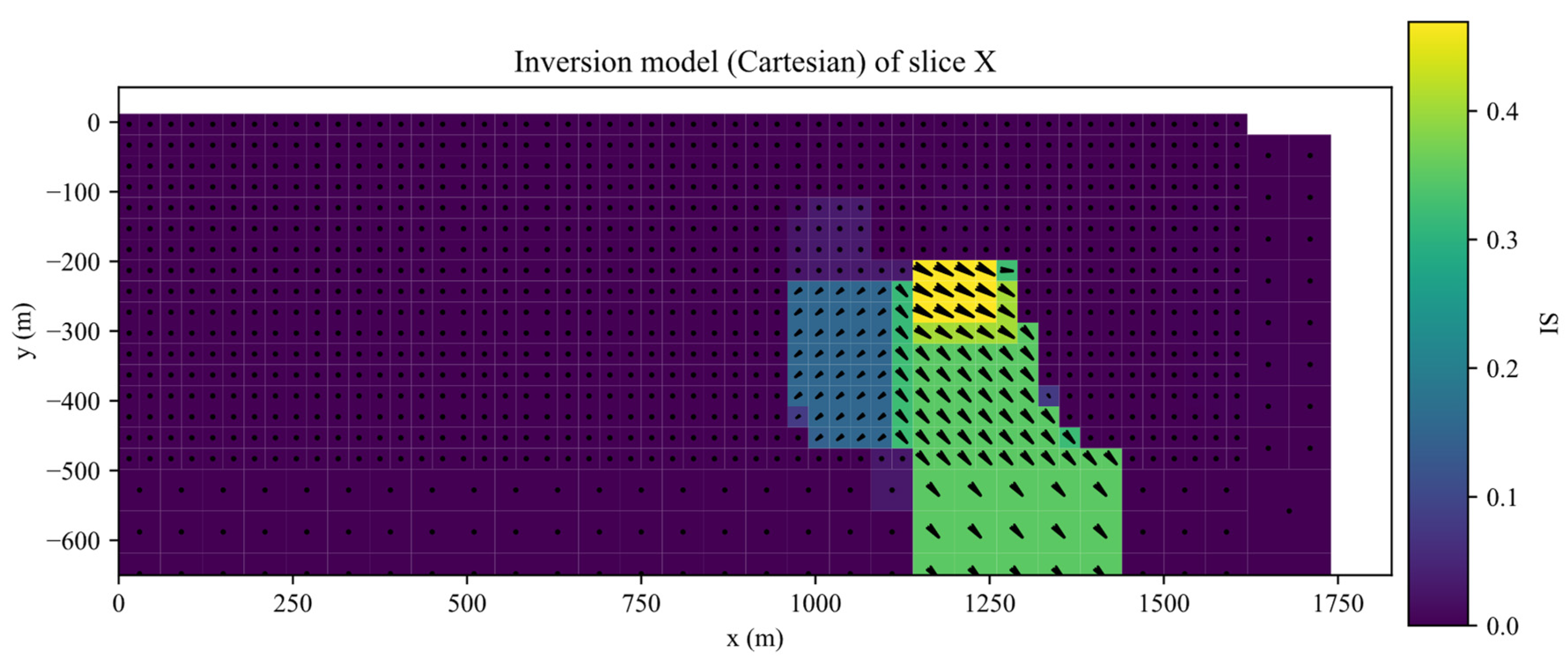
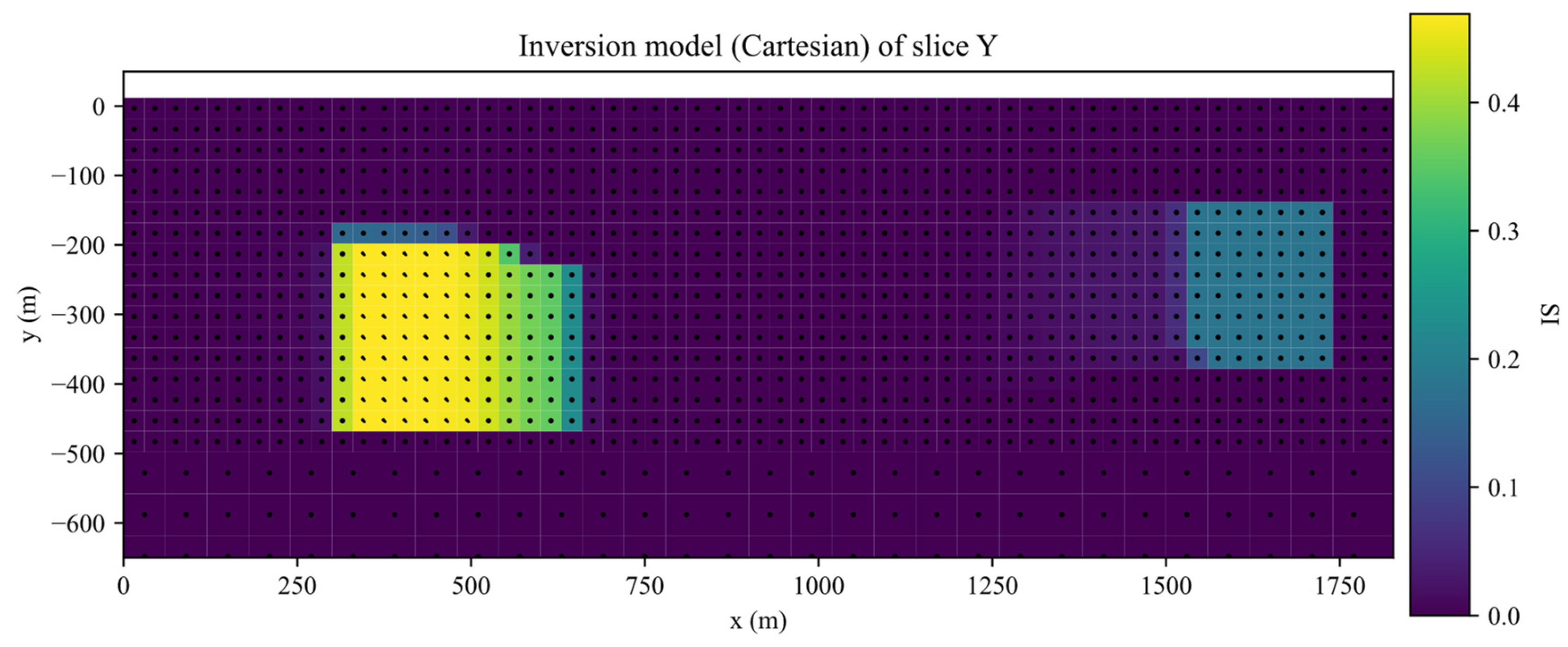
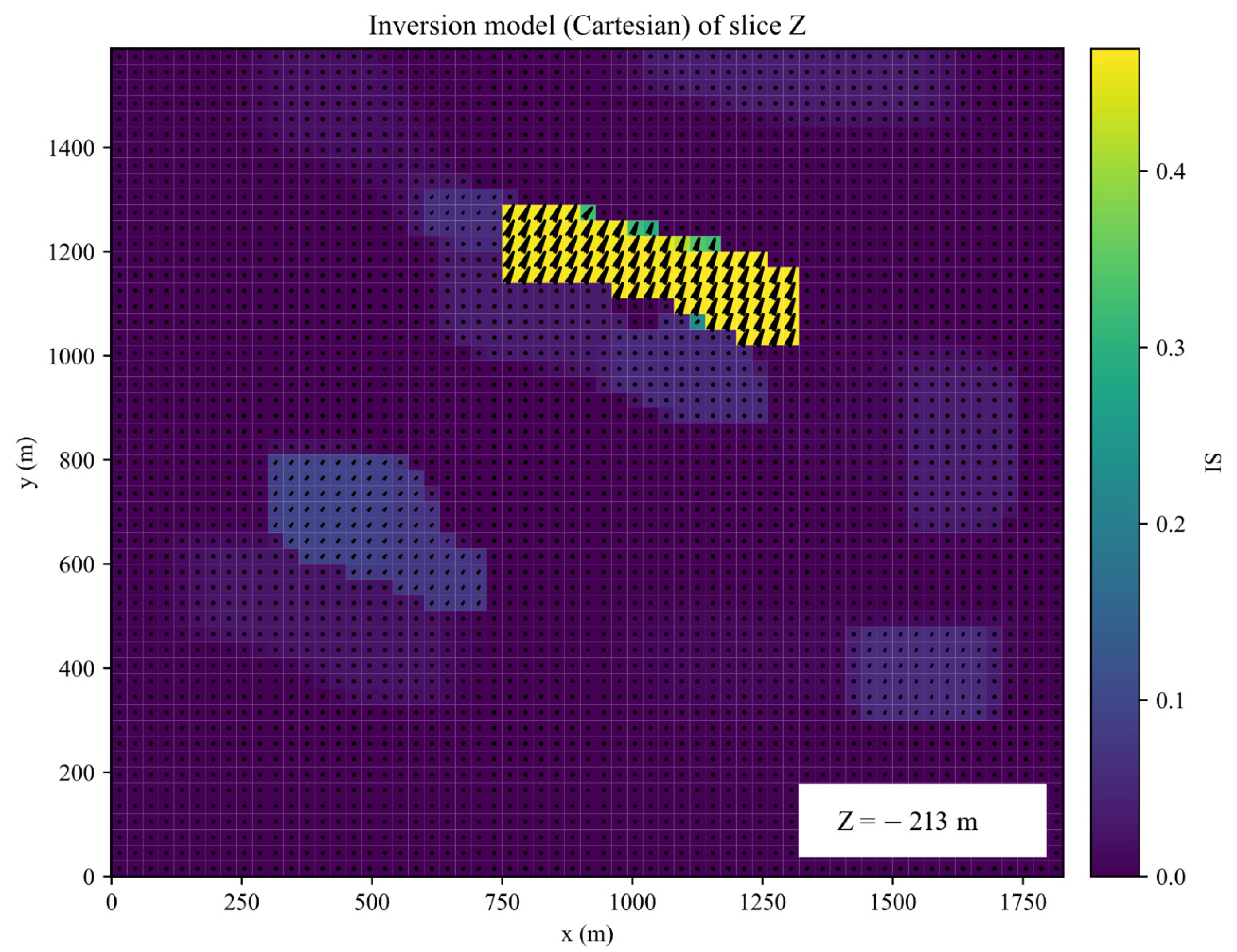
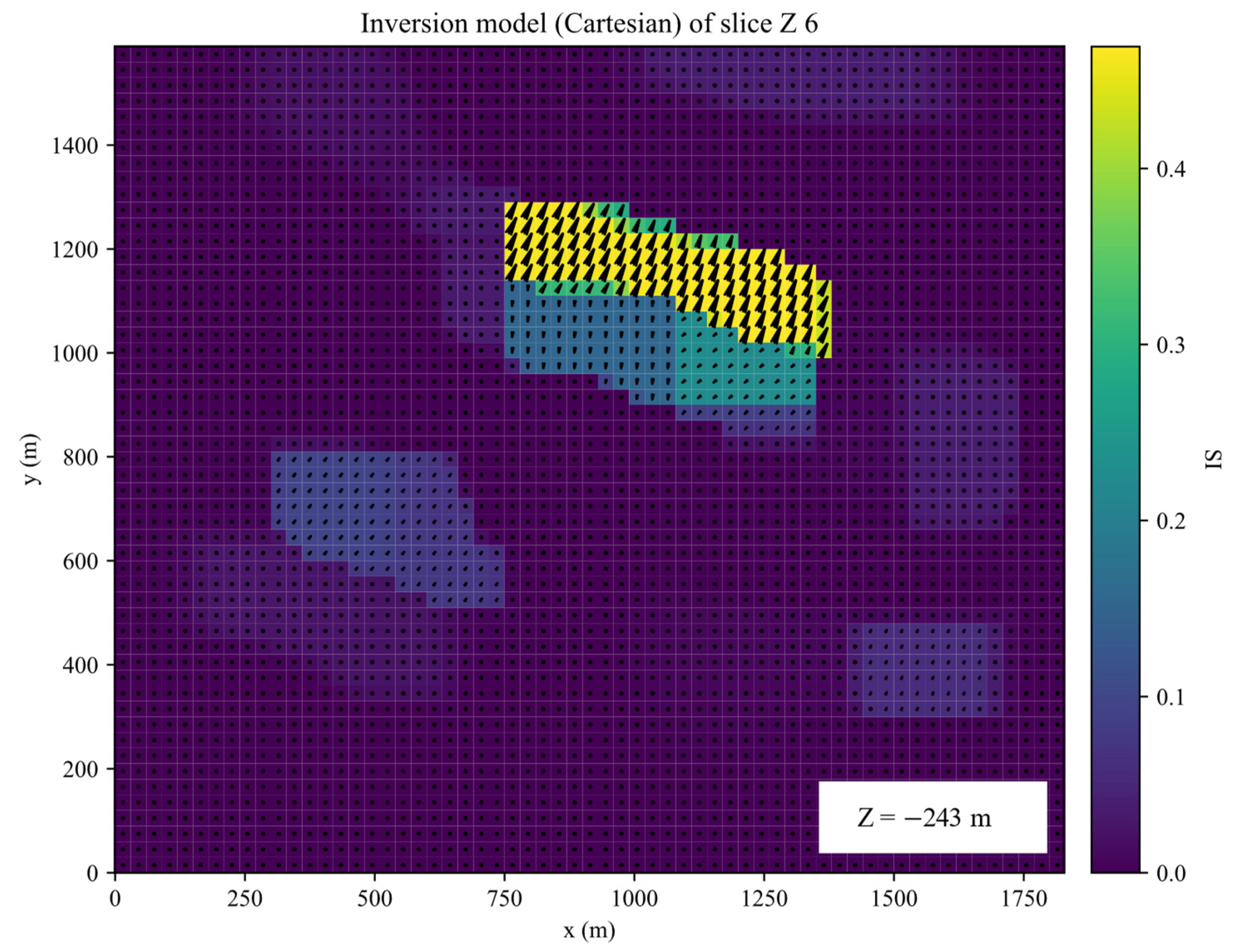
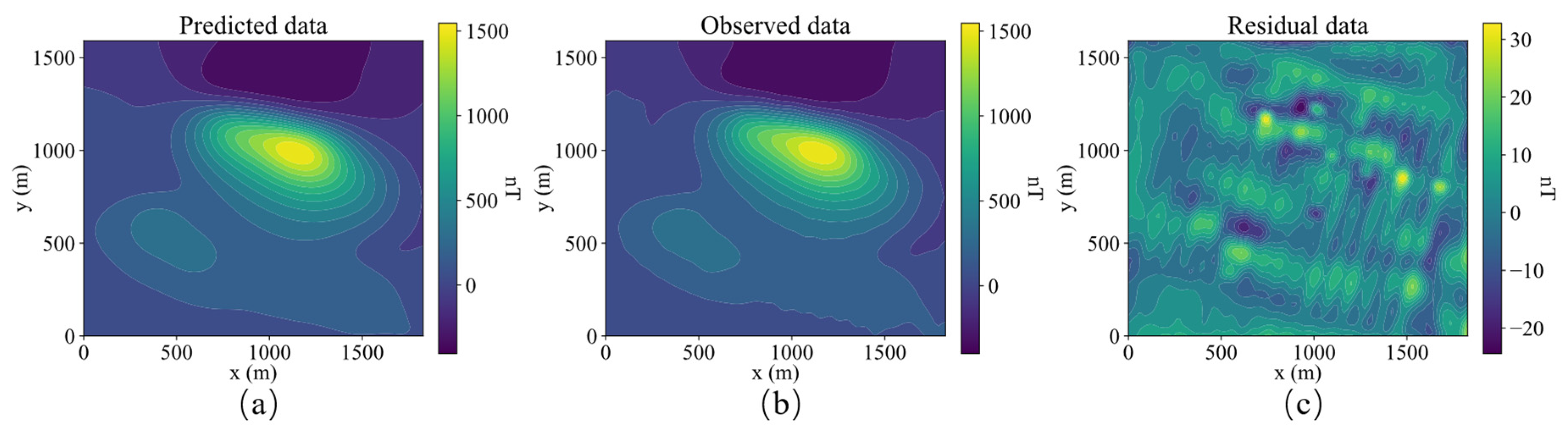
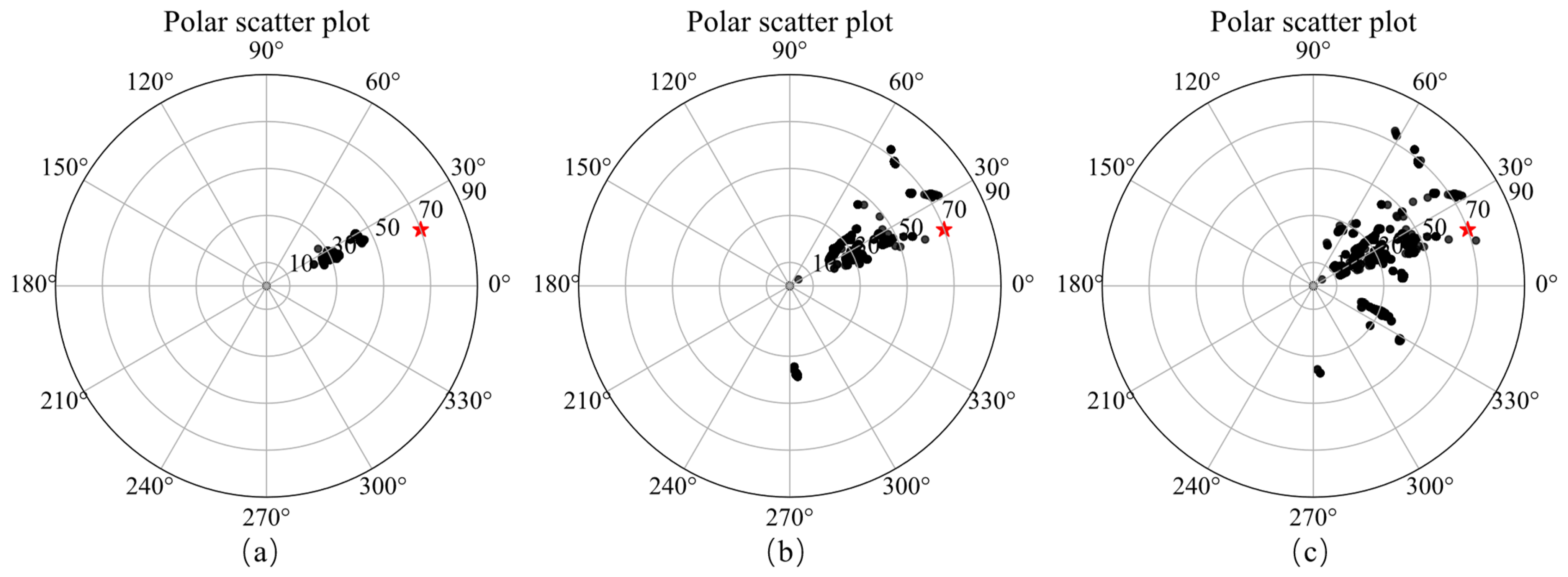
4. Inversion of Real Data
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Nabighian, M.N.; Grauch, V.J.S.; Hansen, R.O.; LaFehr, T.R.; Li, Y.; Peirce, J.W.; Phillips, J.D.; Ruder, M.E. The historical development of the magnetic method in exploration. Geophysics 2005, 70, 33ND–61ND. [Google Scholar] [CrossRef]
- Wang, C.; Shi, W.; Zhu, J.; Xu, J.; Chen, S.; Li, Y. Prospecting of sedimentary-metamorphic type manganese deposits in the Sifangshan area northeastern Hubei Province: Insight from magnetic anomaly information. Bull. Geol. Sci. Technol. 2022, 41, 84–196. [Google Scholar]
- Tao, G.; Wang, G.; Zhang, Z. Extraction of mineralization-related anomalies from gravity and magnetic potential fields for mineral exploration targeting: Tongling Cu (–Au) District, China. Nat. Resour. Res. 2019, 28, 461–486. [Google Scholar] [CrossRef]
- Lin, C.S.; Zhou, J.J.; Yang, Z.Y. A method to solve the aircraft magnetic field model basing on geomagnetic environment simulation. J. Magn. Magn. Mater. 2015, 384, 314–319. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, Y.T.; Li, Z.N.; Fan, H.B.; Ren, G.Q. Detection of ferromagnetic target based on mobile magnetic gradient tensor system. J. Magn. Magn. Mater. 2016, 402, 1–7. [Google Scholar]
- Guo, Z.Y.; Liu, D.J.; Pan, Q.; Zhang, Y.Y. Forward modeling of total magnetic anomaly over a pseudo-2D underground ferromagnetic pipeline. J. Appl. Geophys. 2015, 113, 14–30. [Google Scholar] [CrossRef]
- Hu, Z.; Lü, B.; Du, J.; Sun, S.; Chen, C. Application of Susceptibility Imaging Method by Minimum⁃Structure Inversion to Underwater Target Detection. Earth Sci. 2021, 46, 3376–3384. [Google Scholar]
- Davis, K.; Li, Y.; Nabighian, M. Automatic detection of UXO magnetic anomalies using extended Euler deconvolution. Geophysics 2010, 3, G13–G20. [Google Scholar] [CrossRef]
- Chen, H.L.; Wang, C.L.; Zuo, X.Z. Research on methods of defect classification based on metal magnetic memory. NDT E Int. 2017, 92, 82–87. [Google Scholar] [CrossRef]
- Yin, G.; Zhang, L. Three-dimensional reconstruction of a small-scale magnetic target from magnetic gradient observations. J. Magn. Magn. Mater. 2019, 482, 229–238. [Google Scholar] [CrossRef]
- Sharma, P.V. Rapid computation of magnetic anomalies and demagnetization effects caused by bodies of arbitrary shape. Pure Appl. Geophys. 1966, 64, 89–109. [Google Scholar] [CrossRef]
- Plouff, D. Gravity and magnetic fields of polygonal prisms and application to magnetic terrain corrections. Geophysics 1976, 41, 727–741. [Google Scholar] [CrossRef]
- Guo, Z.H.; Guan, Z.N.; Xiong, S.Q. Cuboid ∆T and its gradient forward theoretical expressions without analytic odd points. Chin. J. Geophys. 2004, 47, 1131–1138. (In Chinese) [Google Scholar] [CrossRef]
- Ren, Z.; Zhang, Y.; Zhong, Y.; Pan, K.; Wu, Q.; Tang, J. Magnetic anomalies caused by 3D polyhedral structures with arbitrary polynomial magnetization. Geophys. Res. Lett. 2022, 19, e2022GL099209. [Google Scholar] [CrossRef]
- Ellis, R.G.; de Wet, B.; Macleod, I.N. Inversion of magnetic data for remanent and induced sources. ASEG Ext. Abstr. 2012, 2012, 1–4. [Google Scholar]
- Clark, D.A. Methods for determining remanent and total magnetizations of magnetic sources—A review. Explor. Geophys. 2014, 45, 271–304. [Google Scholar] [CrossRef]
- Liu, S.; Hu, X.; Zhang, H.; Geng, M.; Zuo, B. 3D magnetization vector inversion of magnetic data: Improving and comparing methods. Pure Appl. Geophys. 2017, 174, 4421–4444. [Google Scholar] [CrossRef]
- Li, Y.; Shearer, S.E.; Haney, M.M.; Dannemiller, N. Comprehensive approaches to 3D inversion of magnetic data affected by remanent magnetization. Geophysics 2010, 75, L1–L11. [Google Scholar] [CrossRef]
- Lourenco, J.S.; Morrison, H.F. Vector magnetic anomalies derived from measurements of a single component of the field. Geophysics 1973, 38, 359–368. [Google Scholar] [CrossRef]
- Rezaie, M. 3D Inversion of Magnetic Amplitude Data with Sparseness Constraint. Pure Appl. Geophys. 2021, 178, 2111–2126. [Google Scholar] [CrossRef]
- Shearer, S.; Li, Y. 3D inversion of magnetic total gradient data in the presence of remanent magnetization. In Proceedings of the Society of Exploration Geophysicists, Denver, CO, USA, 10–15 October 2004. [Google Scholar]
- Gubbins, D.; Ivers, D.; Williams, S. Analysis of Crustal Magnetisation in Cartesian Vector Harmonics. In Proceedings of the AGU Fall Meeting Abstracts, San Franisco, CA, USA, 14–18 December 2015. [Google Scholar]
- Li, Y.; Oldenburg, D.W. 3-D inversion of gravity data. Geophysics 1998, 63, 109–119. [Google Scholar] [CrossRef]
- Parker, R.L.; Shure, L.; Hildebrand, J.A. The application of inverse theory to seamount magnetism. Rev. Geophys. 1987, 25, 17–40. [Google Scholar] [CrossRef]
- Wang, M.; Di, Q.; Xu, K.; Wang, R. Magnetic vector inversion equations and forward and inversed 2d model study. Chin. J. Geophys. 2004, 47, 601–609. [Google Scholar] [CrossRef]
- Lelièvre, P.G.; Oldenburg, D.W. A 3D total magnetization inversion applicable when significant, complicated remanence is present. Geophysics 2009, 74, L21–L30. [Google Scholar] [CrossRef]
- Liu, S.; Hu, X.; Liu, T.; Feng, J.; Gao, W.; Qiu, L. Magnetization vector imaging for borehole magnetic data based on magnitude magnetic anomaly. Geophysics 2013, 78, D429–D444. [Google Scholar] [CrossRef]
- Zhu, Y.; Hdanov, M.S.; Cuma, M. Inversion of TMI data for the magnetization vector using Gramian constraints. In Proceedings of the 85th Annual International Meeting, Tulsa, OK, USA, 1 July 2015. [Google Scholar]
- Li, Y.; Sun, J. 3D magnetization inversion using fuzzy c-means clustering with application to geology differentiation. Geophysics 2016, 81, J61–J78. [Google Scholar] [CrossRef]
- Fournier, D.; Oldenburg, D.W. Inversion using spatially variable mixed ℓ p norms. Geophys. J. Int. 2019, 218, 268–282. [Google Scholar] [CrossRef]
- Fournier, D. Advanced Potential Field Data Inversion with Lp-Norm Regularization. Ph.D. Dissertation, British Columbia University, Vancouver, CA, Canada, 2019. [Google Scholar]
- Ghalehnoee, M.H.; Ansari, A. Compact magnetization vector inversion. Geophys. J. Int. 2022, 228, 1–16. [Google Scholar] [CrossRef]
- Liu, B.; Guo, Q.; Li, S.; Liu, B.; Ren, Y.; Pang, Y.; Guo, X.; Liu, L.; Jiang, P. Deep Learning Inversion of Electrical Resistivity Data. IEEE Trans. Geosci. Remote Sens. 2020, 58, 5715–5728. [Google Scholar] [CrossRef] [Green Version]
- Hu, Z.; Liu, S.; Hu, X.; Fu, L.; Qu, J.; Wang, H.; Chen, Q. Inversion of magnetic data using deep neural networks. Phys. Earth Planet. Inter. 2021, 311, 106653. [Google Scholar] [CrossRef]
- Vatankhah, S.; Liu, S.; Renaut, R.A.; Hu, X.; Hogue, J.D.; Gharloghi, M. An Efficient Alternating Algorithm for the Lₚ-Norm Cross-Gradient Joint Inversion of Gravity and Magnetic Data Using the 2-D Fast Fourier Transform. IEEE Trans. Geosci. Remote Sens. 2020, 60, 4500416. [Google Scholar]
- Li, Y.; Oldenburg, D.W. 3-D inversion of magnetic data. Geophysics 1998, 61, 394–408. [Google Scholar] [CrossRef]
- Lawson, C.L. Contribution to the Theory of Linear Least Maximum Approximation. Ph.D. Dissertation, California University, Los Angeles, CA, USA, 1961. [Google Scholar]
- Vatankhah, S.; Renaut, R.A.; Liu, S. Research note: A unifying framework for the widely used stabilization of potential field inverse problems. Geophy. Prospect. 2020, 68, 1416–1421. [Google Scholar] [CrossRef]
- Zhou, D.; Fang, J.; Song, X.; Guan, C.; Yin, J.; Dai, Y.; Yang, R. Iou loss for 2d/3d object detection. In Proceedings of the 2019 International Conference on 3D Vision (3DV), Quebec City, QC, Canada, 16–19 September 2019. [Google Scholar]
- Cheng, B.; Girshick, R.; Dollár, P.; Berg, A.C.; Kirillov, A. Boundary IoU: Improving object-centric image segmentation evaluation. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, TN, USA, 20–25 June 2021. [Google Scholar]
- Rezatofighi, H.; Tsoi, N.; Gwak, J.; Sadeghian, A.; Reid, I.; Savarese, S. Generalized Intersection Over Union: A Metric and a Loss for Bounding Box Regression. In Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, CA, USA, 15–20 June 2019. [Google Scholar]
- Cockett, R.; Kang, S.; Heagy, L.J.; Pidlisecky, A.; Oldenburg, D.W. SimPEG: An open source framework for simulation and gradient based parameter estimation in geophysical applications. Comput. Geosci. 2015, 85, 142–154. [Google Scholar] [CrossRef]



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Index | Model 1 | Model 2 | Model 3 | Model 4 |
|---|---|---|---|---|
| 0.277 | 0.315 | 1.000 | 1.000 | |
| 0.352 | 0.378 | 0.160 | 0.052 | |
| 0.789 | 0.834 | 6.255 | 19.108 |
| Methods | ||||||||
|---|---|---|---|---|---|---|---|---|
| Method 1 | 1.0 | 0.6 | 0.6 | 0.2 | 0 | 0.8 | 0.8 | 0 |
| Method 2 | 1.0 | 0 | 0 | 0 | 1.0 | - | - | - |
| Method 3 | 1.0 | 0.6 | 0.6 | 0.2 | 0 | 0.8 | 0.8 | 0 |
| Index | Method 1 | Method 2 | Method 3 |
|---|---|---|---|
| 0.503 | 0.698 | 1.000 | |
| 0.336 | 0.323 | 0.052 | |
| 1.497 | 2.159 | 19.108 |
| Methods | ||||||||
|---|---|---|---|---|---|---|---|---|
| Method 1 | 1.0 | 0.6 | 0.6 | 0.6 | 0 | 0.7 | 0.8 | 0 |
| Method 2 | 1.0 | 0 | 0 | 0 | 1.0 | - | - | - |
| Method 3 | 1.0 | 0.6 | 0.6 | 0.6 | 0 | 0.7 | 0.8 | 0 |
| Index | Method 1 | Method 2 | Method 3 |
|---|---|---|---|
| 0.281 | 0.414 | 1.000 | |
| 0.482 | 0.455 | 0.029 | |
| 0.584 | 0.909 | 34.232 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Geng, H.; Liu, S. Magnetization Vector Inversion Based on Amplitude and Gradient Constraints. Remote Sens. 2022, 14, 5497. https://doi.org/10.3390/rs14215497
Shi X, Geng H, Liu S. Magnetization Vector Inversion Based on Amplitude and Gradient Constraints. Remote Sensing. 2022; 14(21):5497. https://doi.org/10.3390/rs14215497
Chicago/Turabian StyleShi, Xiaoqing, Hua Geng, and Shuang Liu. 2022. "Magnetization Vector Inversion Based on Amplitude and Gradient Constraints" Remote Sensing 14, no. 21: 5497. https://doi.org/10.3390/rs14215497