1. Introduction
H
igh-resolution range recovery of a high-resolution radar has many potential applications in multi-dimensional imaging and target recognition [
1,
2,
3,
4,
5]. To obtain a high range resolution, signals with large bandwidths are generally transmitted. The realization of a large bandwidth can be divided into two categories. The first type transmits real wideband signals, while the other type radiates a series of narrowband waveforms to achieve the range resolution of a wideband waveform by bandwidth synthesizing approaches. Although the bandwidth synthesizing techniques decrease the instantaneous bandwidth of radar systems, the requirement of a long observation time limits the application of these methods in the probing of fast moving targets [
6]. In contrast, a high-resolution radar that directly transmits wideband signals only needs to process within the duration of a single pulse, which is advantageous for the detection of non-cooperative targets moving at high speed, and it has attracted extensive research attention [
7,
8].
Early studies mainly focused on improving the quality of range recovery in the absence of jamming. Many studies modeled range recovery as a sparse recovery problem and used compressed sensing (CS) methods to solve it [
9,
10,
11,
12]. However, with the rapid development of digital radio frequency memory (DRFM) technology, the coherent jamming significantly degrades the quality of range recovery [
13,
14]. In the jamming scene, the jammer transmits intercepted signals to the radar, which has the advantages of easy implementation and fast response [
15]. With the development of smart noise jamming, the jammer modulates the intercepted signal and generates smart noise jamming [
16,
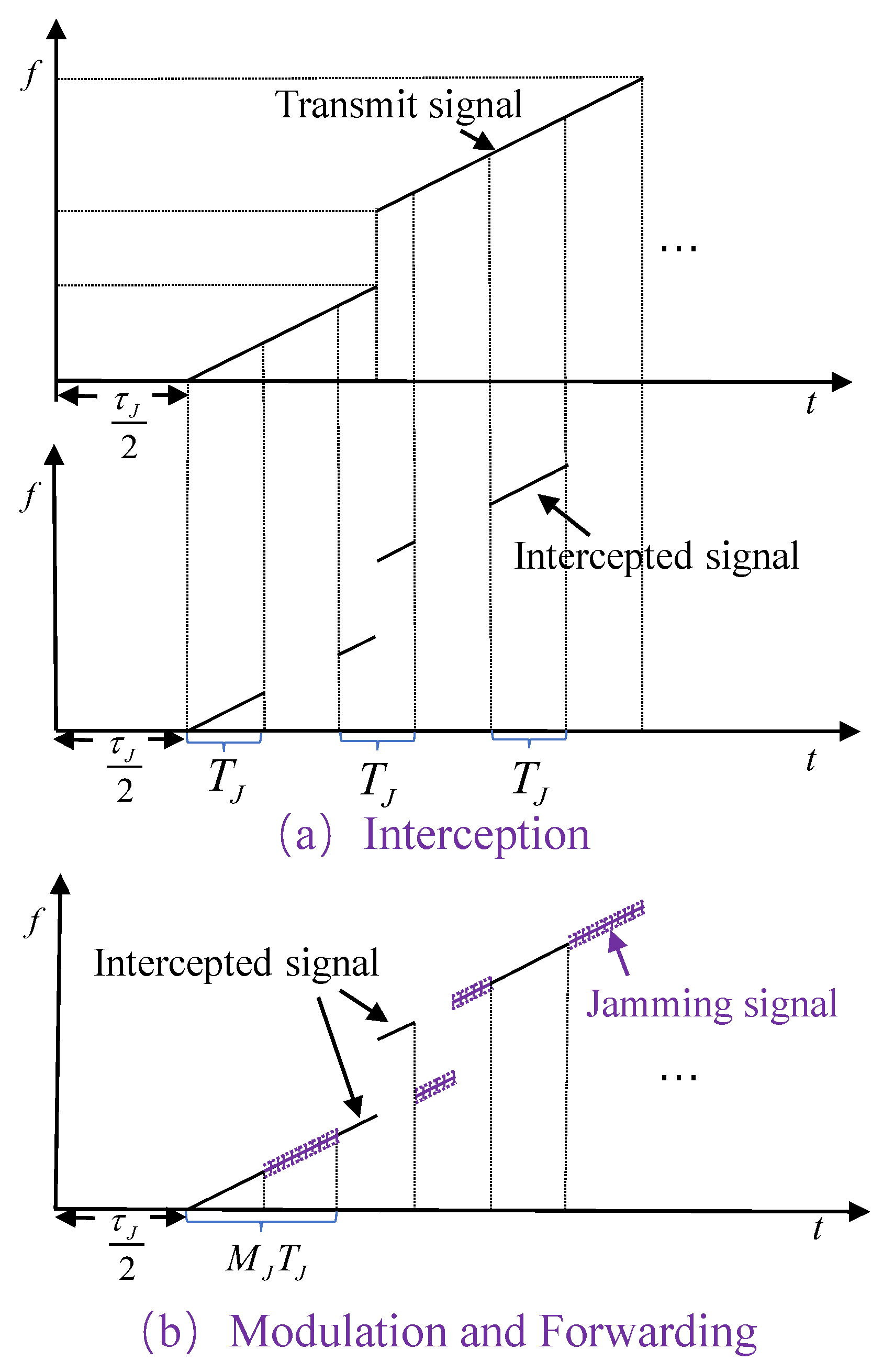
17], which has both blanket noise jamming and deception jamming effects. Due to the influence of jamming, observations are periodically polluted, which seriously affects the performance of range recovery. Consequently, jamming suppression is one of the most pressing issues for range recovery of a high-resolution radar.
In recent years, jamming suppression has become one of the research hotspots in the field of electronic counter-countermeasures, and many methods of jamming suppression have been proposed, including signal processing algorithms and waveform design approaches. Research [
18] reconstructed the jamming signal and eliminated the jamming signal by estimating the jamming parameters, which requires an accurate estimation of the jamming parameters. According to the discontinuity of interrupted-sampling repeater jamming (ISRJ) in the time-frequency domain, some filtering methods were proposed in [
19,
20,
21,
22], which effectively estimate the jamming parameters and filter the ISRJ in the frequency domain. However, these methods are no longer applicable to smart noise jamming because the target echo and the jamming signal coincide in the frequency domain. In addition, the direct elimination of jamming slices causes a periodic loss of observation data, and the problem caused by grating lobes is severe.
In addition to signal processing algorithms, waveform design is also an effective way to solve jamming problems. Some researchers focus on the design of orthogonal coded waveforms to mismatch the ISRJ with unintercepted radar signal slices [
23,
24,
25]. However, generating such a phase-coded waveform is difficult when the wideband signal is required. The frequency-modulated continuous waveform (FMCW) has attracted much attention because it is easy to generate wideband signals using low-cost hardware. However, with the development of interrupted sampling technology, the jamming appears periodically, and the observations are periodically missing due to the jamming suppression, which causes a serious grating lobe problem. The carrier-frequency agile FMCW signal refers to the FMCW signals with different carrier frequencies in each period, which has random characteristics and improves the radar anti-jamming performance. An inter-pulse carrier-frequency agile FMCW signal for a dual-function radar communication system is proposed in [
26], while the waveform cannot cope with the rapidly changing jamming within a pulse. In order to cope with the jamming within a pulse, inspired by frequency-agile radar, we hope that the observed data are missing non-periodically. To that aim, we propose an intra-pulse frequency-coded FMCW (IPFC-FMCW) to solve the jamming problem.
The traditional FMCW signal causes periodic observation loss due to smart noise jamming. We propose an IPFC-FMCW signal, which consists of a train of FMCW chips with different widths and frequencies, with a random property to solve the problem of periodic data missing caused by jamming. In order to improve the performance of the waveform, the range profile of the waveform after jamming suppression is derived to evaluate the waveform performance. The optimization problem of waveform parameters is proposed, and the transmit waveform parameters are obtained by the simulated annealing method [
27]. However, due to jamming, the problem of missing observations is inevitable. In the case of missing data, the problem of grid mismatch is evident in the grid-based CS method. We propose the refined-orthogonal matching pursuit (R-OMP) algorithm to obtain gridless range recovery results of scatterers.
In this paper, the proposed waveform is different from the conventional frequency coding waveform. On the one hand, some existing frequency coding waveforms are mainly used for detection under jamming-free conditions, where the constraints aim to obtain better autocorrelation performance, cross-correlation performance, etc. [
28,
29]. On the other hand, there are also some frequency coding waveforms used for anti-jamming. The frequency coding waveform in [
22] varies the frequency coding of the transmit signal against ISRJ, but it still suffers from periodically missing data due to the same width of the chip.
To sum up, the main contributions of this article are listed as follows.
- (1)
The periodic data missing of the FMCW signal in smart noise jamming scenarios causes a serious sidelobe problem. We propose the IPFC-FMCW waveform with non-periodic data missing in smart noise jamming scenarios to solve the periodic data missing problem of the FMCW signal.
- (2)
We take the three metrics of the range profile as the objective and use the simulated annealing method to optimize the waveform, which reduces the proportion of jamming signals and increases the peak to sidelobe ratio.
- (3)
Compared with the existing grid-based range recovery methods, the proposed range recovery method including a REFINE step is suitable for scenes with missing observations.
The rest of this paper is organized as follows. In
Section 2, the working scenario and the transmitted signal model are introduced. In
Section 3, the received signal model is introduced. In
Section 4, the method of waveform design is introduced. In
Section 5, the proposed range recovery approach is formulated. In
Section 6, the simulation results evaluate the performance of waveform design and range recovery approach. Concluding remarks are presented in
Section 7.
Throughout the article, we use to denote the sets of complex and real numbers, respectively. We denote the transpose, conjugate, and Hermitian transpose by , , and , respectively. The notations and are the sets of G-dimensional vectors and matrices of complex numbers, respectively.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}