
Noise Parameter Estimation Two-Stage Network for Single Infrared Dim Small Target Image Destriping

Abstract
:1. Introduction
- A destriping method based on a noise parameter estimation two-stage network is proposed, which can adapt to the input image size and effectively correct the real nonuniformity infrared image;
- According to the nonuniformity response model of the line-scan detector, a deep learning dataset for strip noise parameter estimation and image reconstruction is produced;
- A multi-scale feature extraction unit is designed to use image information more effectively, and the proposed network has excellent generalization to different intensities of nonuniform noise and different backgrounds;
- The noise parameter estimation mechanism in our network can fundamentally solve the problem that texture details and dim small targets may be removed due to image over-smoothing.
2. Methods
2.1. Nonuniformity Response Model and Datasets
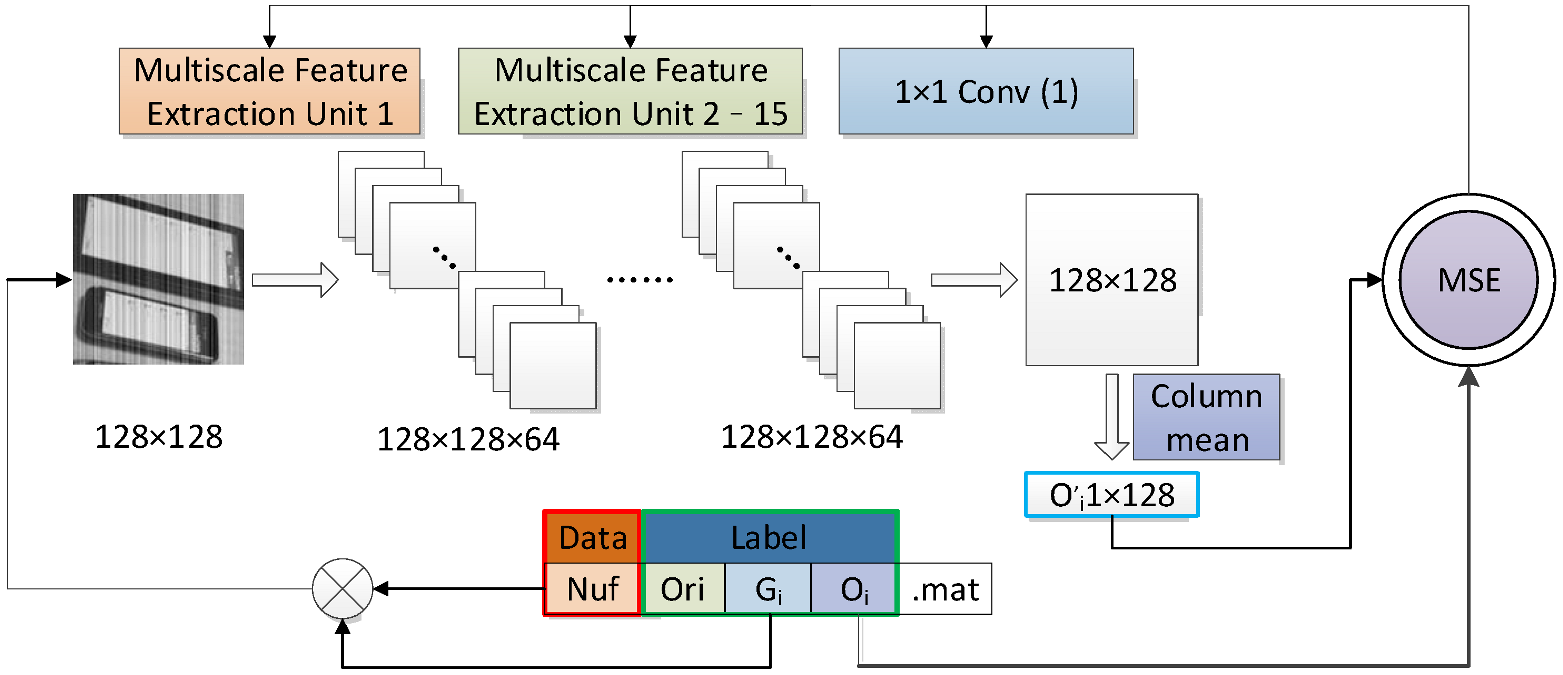
2.2. Network Design
3. Results
3.1. Network Model Training
3.2. Quality Evaluation Metrics
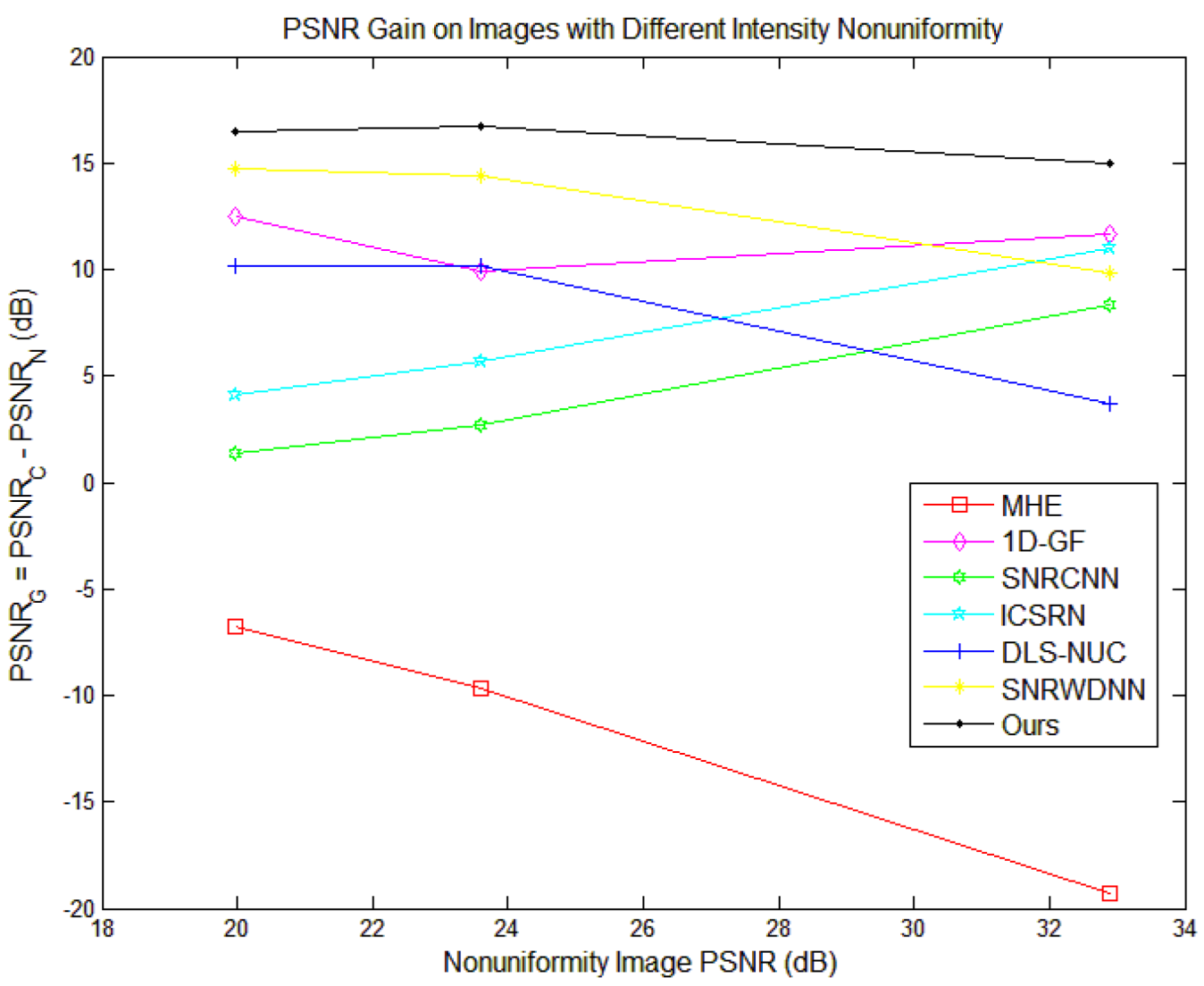
3.3. Method Comparison on Simulated Data with Different Intensities of Nonuniformity
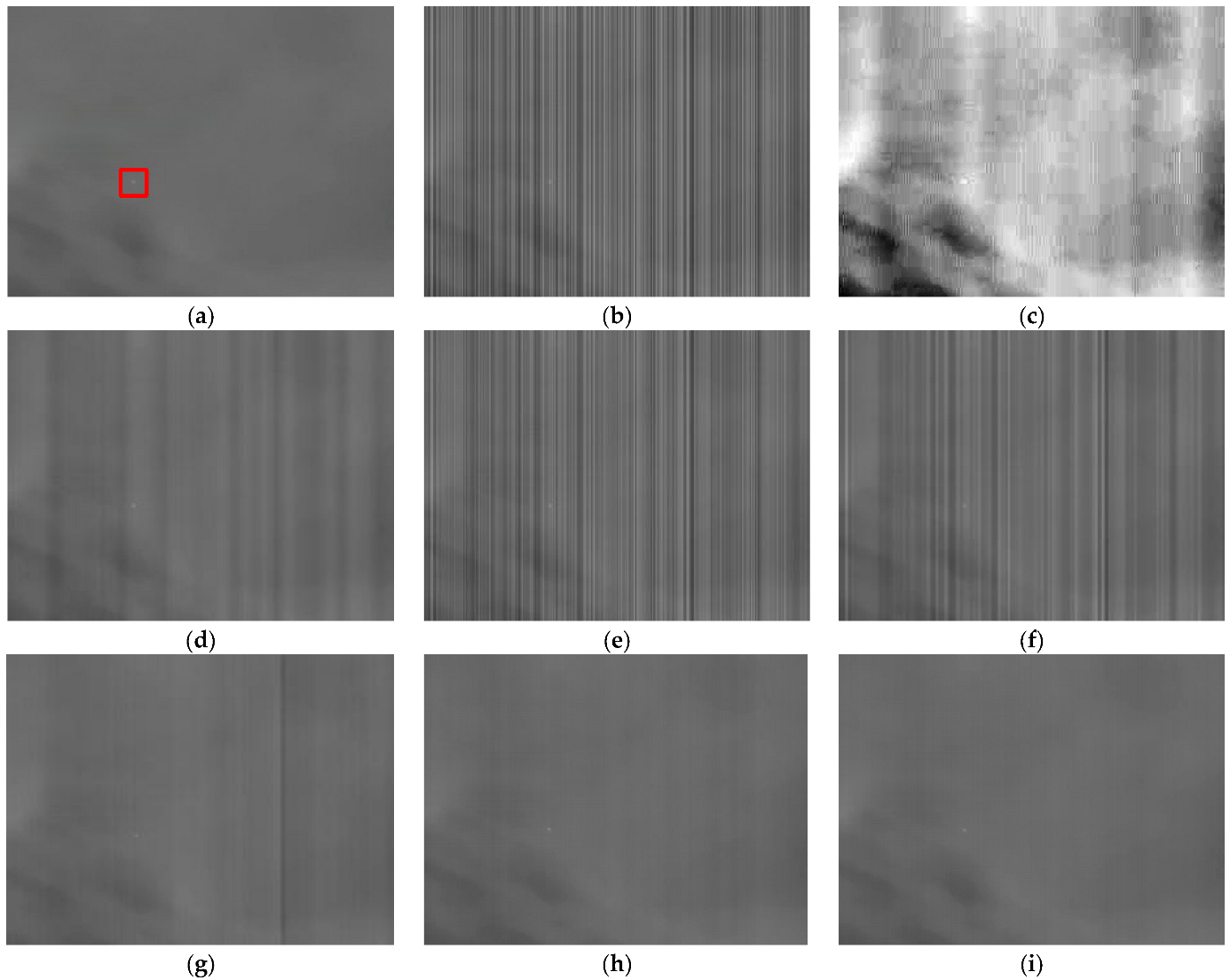
3.4. Method Comparison on Simulated Data with Different Backgrounds
- Figure 12 is the nonuniformity correction results of Test-1 ().
- Figure 13 is the nonuniformity correction results of Test-6 ().
- Figure 14 is the nonuniformity correction results of Test-10 ().
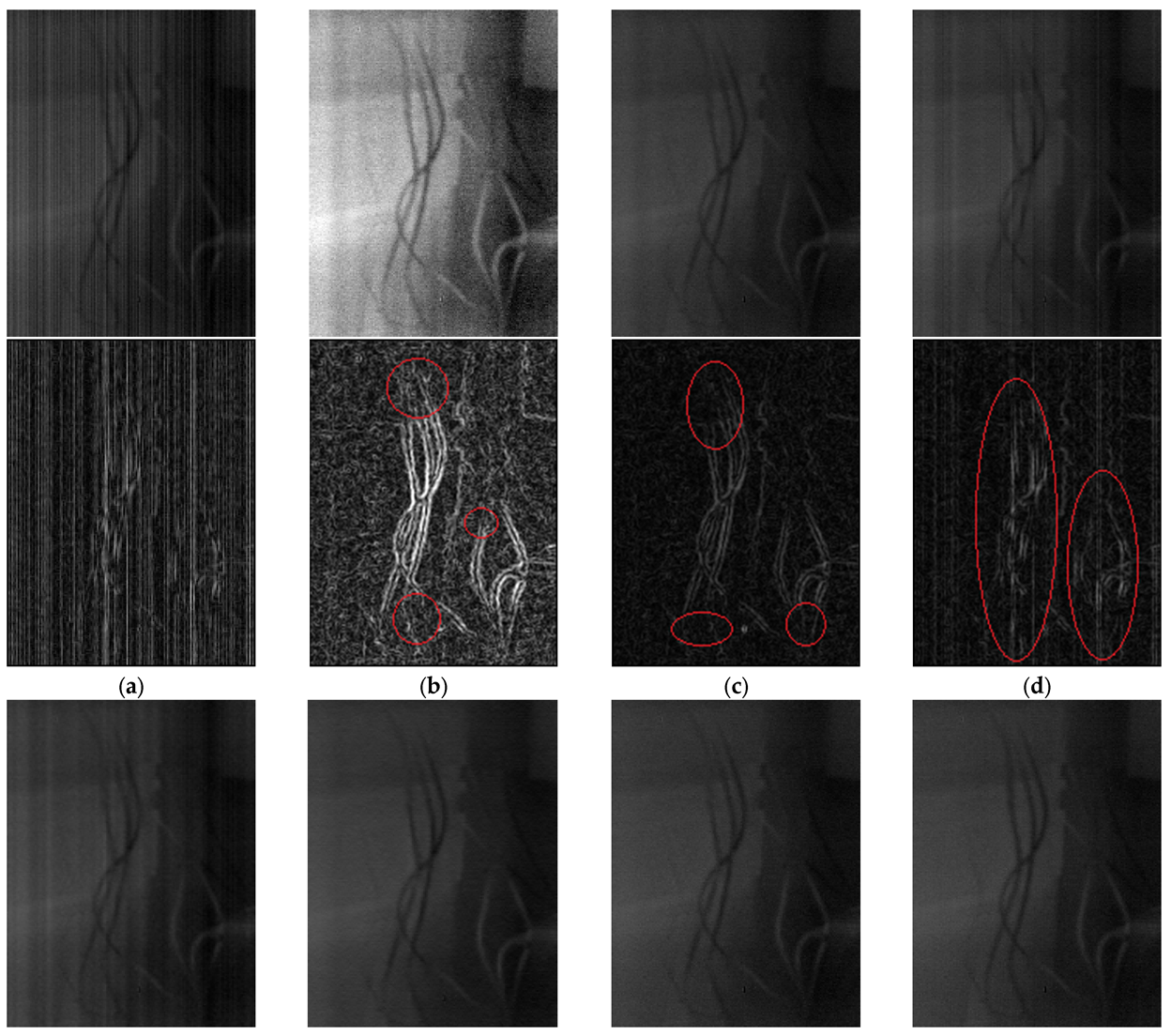
3.5. Method Comparison on Real Data
4. Discussion
4.1. Analysis of Simulation Experiment Results for Different Intensities of Nonuniformity
4.2. Analysis of Simulation Experiment Results for Different Backgrounds
4.3. Analysis of Real Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Song, S.; Yang, G.P.; Zhou, X. Line array time delay integral CCD sweep image non-uniformity correction method. Procedia Comput. Sci. 2020, 174, 216–223. [Google Scholar]
- Zhang, W.; Cong, M.; Wang, L. Algorithms for optical weak small targets detection and tracking: Review. In Proceedings of the International Conference on Neural Networks and Signal Processing, Istanbul, Turkey, 14–17 December 2003. [Google Scholar]
- Zhang, T.X.; Shi, C.C.; Li, J.J.; Liu, H.N.; Yuan, Y.J.; Zhou, Y. Overview of research on the adaptive algorithms for nonuniformity correction of Infrared Focal Plane Array. J. Infrared Millim. Waves 2007, 26, 409–413. [Google Scholar]
- Han, K.L.; He, C.F. A Nonuniformity Correction Algorithm for IRFPAs Based on Two Points and It’s Realization by DSP. Infrared Technol. 2007, 9, 541–544. [Google Scholar]
- Wang, J.; Hong, W. Non-uniformity correction for infrared cameras with variable integration time based on two-point correction. In Infrared Device and Infrared Technology; AOPC: Philadelphia, PA, USA, 2021. [Google Scholar]
- Scribner, D.A.; Sarkady, K.A.; Kruer, M.R.; Caulfield, J.T.; Hunt, J.D.; Herman, C. Adaptive nonuniformity correction for IR focal-plane arrays using neural networks. SPIE Proc. 1991, 1541, 100–109. [Google Scholar]
- Harris, J.G.; Chiang, Y.M. Nonuniformity correction using the constant-statistics constraint: Analog and digital implementations. SPIE Proc. 1997, 3061, 895–905. [Google Scholar]
- Torres, S.N.; Hayat, M.M. Kalman filtering for adaptive nonuniformity correction in infrared focal-plane arrays. J. Opt. Soc. Am. A 2003, 20, 470. [Google Scholar] [CrossRef] [Green Version]
- Zuo, C.; Chen, Q. Scene-based nonuniformity correction algorithm based on interframe registration. J. Opt. Soc. Am. A 2011, 28, 1164. [Google Scholar] [CrossRef]
- Li, Y.; Jin, W.; Zhu, J.; Zhang, X.; Li, S. An adaptive deghosting method in neural network-based infrared detectors nonuniformity correction. Sensors 2018, 18, 211. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Qin, H.; Yan, X.; Zeng, Q.; Yang, T. Temporal-spatial nonlinear filtering for infrared focal plane array stripe nonuniformity correction. Symmetry 2019, 11, 673. [Google Scholar] [CrossRef] [Green Version]
- Lu, C.H. Stripe non-uniformity correction of infrared images using parameter estimation. Infrared Phys. Technol. 2020, 107, 103313. [Google Scholar] [CrossRef]
- Seo, S.G.; Jeon, J.W. Real-time scene-based nonuniformity correction using feature pattern matching. In Proceedings of the 2021 15th International Conference on Ubiquitous Information Management and Communication (IMCOM), Seoul, Korea, 4–6 January 2021. [Google Scholar]
- Tendero, Y.; Landeau, S.; Gilles, J. Non-uniformity correction of infrared images by Midway Equalization. Image Process. Line 2012, 2, 134–146. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y.; Yang, M.Y.; Tisse, C.-L. Effective strip noise removal for low-textured infrared images based on 1-D guided filtering. IEEE Trans. Circ. Syst. Video Technol. 2016, 26, 2176–2188. [Google Scholar] [CrossRef]
- Zhang, T.; Li, X.; Li, J.; Xu, Z. CMOS fixed pattern noise elimination based on sparse unidirectional hybrid total variation. Sensors 2020, 20, 5567. [Google Scholar] [CrossRef] [PubMed]
- Song, Q.; Huang, Z.; Ni, H.; Bai, K.; Li, Z. Remote Sensing Images destriping with an enhanced low-rank prior and total variation regulation. Signal Image Video Process. 2022, 16, 1895–1903. [Google Scholar] [CrossRef]
- Wang, E.; Jiang, P.; Li, X.; Cao, H. Infrared Stripe Correction algorithm based on wavelet decomposition and total variation-guided filtering. J. Eur. Opt. Soc.-Rapid Publ. 2019, 16, 2971. [Google Scholar] [CrossRef]
- Shao, Y.; Sun, Y.; Zhao, M.; Chang, Y.; Zheng, Z.; Tian, C.; Zhang, Y. Infrared image stripe noise removing using least squares and gradient domain guided filtering. Infrared Phys. Technol. 2021, 119, 103968. [Google Scholar] [CrossRef]
- Li, M.; Nong, S.; Nie, T.; Han, C.; Huang, L.; Qu, L. A novel stripe noise removal model for infrared images. Sensors 2022, 22, 2971. [Google Scholar] [CrossRef]
- Li, M.; Nong, S.; Nie, T.; Han, C.; Huang, L. An infrared stripe noise removal method based on multi-scale wavelet transform and multinomial sparse representation. Comput. Intell. Neurosci. 2022, 2022, 1–18. [Google Scholar] [CrossRef]
- Huang, S.; Lu, T.; Lu, Z.; Rong, J.; Zhao, X.; Li, J. CMOS image sensor fixed pattern noise calibration scheme based on digital filtering method. Microelectron. J. 2022, 124, 105431. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Spatial pyramid pooling in deep convolutional networks for visual recognition. IEEE Trans. Pattern Anal. Mach. Intell. 2015, 37, 1904–1916. [Google Scholar] [CrossRef] [Green Version]
- Xiao, C.; Yin, Q.; Ying, X.; Li, R.; Wu, S.; Li, M.; Liu, L.; An, W.; Chen, Z. DSFNet: Dynamic and static fusion network for moving object detection in satellite videos. IEEE Geosci. Remote Sens. Lett. 2022, 19, 1–5. [Google Scholar] [CrossRef]
- Kohli, N.; Yadav, D.; Vatsa, M.; Singh, R.; Noore, A. Deep face-representation learning for kinship verification. Deep Learn. Biometr. 2018, 130, 127–152. [Google Scholar]
- Ullah, F.U.; Ullah, A.; Khan, N.; Lee, M.Y.; Rho, S.; Baik, S.W. Deep learning-assisted short-term power load forecasting using deep convolutional LSTM and stacked GRU. Complexity 2022, 2022, 1–15. [Google Scholar] [CrossRef]
- Kuang, X.; Sui, X.; Chen, Q.; Gu, G. Single infrared image stripe noise removal using deep convolutional networks. IEEE Photon. J. 2017, 9, 1–13. [Google Scholar] [CrossRef]
- Xiao, P.; Guo, Y.; Zhuang, P. Removing stripe noise from infrared cloud images via deep convolutional networks. IEEE Photon. J. 2018, 10, 1–14. [Google Scholar] [CrossRef]
- He, Z.; Cao, Y.; Dong, Y.; Yang, J.; Cao, Y.; Tisse, C.-L. Single-image-based nonuniformity correction of uncooled long-wave infrared detectors: A deep-learning approach. Appl. Opt. 2018, 57, D162. [Google Scholar] [CrossRef]
- Guan, J.; Lai, R.; Xiong, A. Wavelet Deep Neural Network for stripe noise removal. IEEE Access 2019, 7, 44544–44554. [Google Scholar] [CrossRef]
- Chang, Y.; Yan, L.; Liu, L.; Fang, H.; Zhong, S. Infrared Aerothermal nonuniform correction via deep multiscale residual network. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1120–1124. [Google Scholar] [CrossRef]
- Guan, J.; Lai, R.; Xiong, A.; Liu, Z.; Gu, L. Fixed pattern noise reduction for infrared images based on cascade residual attention CNN. Neurocomputing 2020, 377, 301–313. [Google Scholar] [CrossRef] [Green Version]
- Xu, K.; Zhao, Y.; Li, F.; Xiang, W. Single infrared image stripe removal via deep multi-scale dense connection convolutional neural network. Infrared Phys. Technol. 2022, 121, 104008. [Google Scholar] [CrossRef]
- Li, T.; Zhao, Y.; Li, Y.; Zhou, G. Non-uniformity correction of infrared images based on improved CNN with long-short connections. IEEE Photon. J. 2021, 13, 1–13. [Google Scholar] [CrossRef]
- Zhang, S.; Sui, X.; Yao, Z.; Gu, G.; Chen, Q. Research on nonuniformity correction based on Deep Learning. In Infrared Device and Infrared Technology; AOPC: Philadelphia, PA, USA, 2021. [Google Scholar]
- Lin, T.-Y.; Maire, M.; Belongie, S.; Hays, J.; Perona, P.; Ramanan, D.; Dollár, P.; Zitnick, C.L. Microsoft Coco: Common Objects in Context. In Proceedings of the Computer Vision–ECCV, Zurich, Switzerland, 6–12 September 2014; pp. 740–755. [Google Scholar]
- Li, S.; Huo, L. Remote sensing image change detection based on fully convolutional network with Pyramid Attention. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Kuala Lampur, Malaysia, 17–22 July 2021. [Google Scholar]
- Ma, X.; Yang, Z. A new multi-scale backbone network for object detection based on asymmetric convolutions. Sci. Prog. 2021, 104, 003685042110113. [Google Scholar] [CrossRef]
- Jebadurai, J.; Jebadurai, I.J. Super-resolution of digital images using CNN with Leaky Relu. Int. J. Recent Technol. Eng. 2019, 8, 210–212. [Google Scholar]
- Pezoa, J.E.; Hayat, M.M.; Torres, S.N.; Saifur Rahman, M. Multimodel Kalman filtering for adaptive nonuniformity correction in infrared sensors. J. Opt. Soc. Am. A 2006, 23, 1282. [Google Scholar] [CrossRef]
- Liu, Y.; Zhu, H.; Zhao, Y. Nonuniformity correction algorithm based on infrared focal plane array readout architecture. Opt. Precis. Eng. 2008, 1, 128–133. [Google Scholar]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [Green Version]
- Hayat, M.M.; Torres, S.N. Statistical algorithm for nonuniformity correction in focal-plane arrays. Appl. Opt. 1999, 38, 772. [Google Scholar] [CrossRef] [Green Version]
- Gao, C.Q.; Zhang, T.Q.; Li, Q. Small infrared target detection using sparse ring representation. IEEE Aerosp. Electr. Syst. Mag. 2012, 27, 21–30. [Google Scholar]
- Li, M.; Zhang, T.X.; Zuo, Z.R.; Sun, X.C.; Yang, W.D. Novel dim target detection and estimation algorithm based on double threshold partial differential equation. Opt. Eng. 2006, 45, 090502. [Google Scholar] [CrossRef]
- Rakwatin, P.; Takeuchi, W.; Yasuoka, Y. Stripe noise reduction in MODIS data by combining histogram matching with facet filter. IEEE Trans. Geosci. Remote Sens. 2007, 45, 1844–1856. [Google Scholar] [CrossRef]
- Kang, Y.; Pan, L.; Sun, M.; Liu, X.; Chen, Q. Destriping High-resolution satellite imagery by improved moment matching. Int. J. Remote Sens. 2017, 38, 6346–6365. [Google Scholar] [CrossRef]
- Jia, J.; Wang, Y.; Cheng, X.; Yuan, L.; Zhao, D.; Ye, Q.; Zhuang, X.; Shu, R.; Wang, J. Destriping algorithms based on statistics and spatial filtering for visible-to-thermal infrared pushbroom hyperspectral imagery. IEEE Trans. Geosci. Remote Sens. 2019, 57, 4077–4091. [Google Scholar] [CrossRef]
- Waghule, D.R.; Ochawar, R.S. Overview on edge detection methods. In Proceedings of the 2014 International Conference on Electronic Systems, Signal Processing and Computing Technologies, Nagpur, India, 9–11 January 2014. [Google Scholar]
- Dai, Y.; Wu, Y.; Zhou, F.; Barnard, K. Asymmetric contextual modulation for infrared small target detection. In Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision (WACV), Waikoloa, HI, USA, 3–8 January 2021. [Google Scholar]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experiment | Methods | RMSE | PSNR (dB) | SSIM | IR | SCR |
|---|---|---|---|---|---|---|
| Low-Intensity Nonuniformity | Noise Image | 5.77 | 32.9012 | 0.7309 | 0.0706 | 2.5708 |
| MHE [14] | 53.49 | 13.5652 | 0.7712 | 0.0381 | 3.1419 | |
| 1D-GF [15] | 1.51 | 44.5529 | 0.9965 | 0.0157 | 3.4791 | |
| SNRCNN [27] | 2.21 | 41.2492 | 0.9741 | 0.0205 | 3.0936 | |
| ICSRN [28] | 1.62 | 43.9166 | 0.9937 | 0.0143 | 3.6239 | |
| DLS-NUC [29] | 3.77 | 36.6104 | 0.9643 | 0.0145 | 3.5481 | |
| SNRWDNN [30] | 1.87 | 42.7037 | 0.9906 | 0.0157 | 3.6770 | |
| Ours | 1.03 | 47.8425 | 0.9993 | 0.0150 | 3.7283 | |
| Medium-Intensity Nonuniformity | Noise Image | 16.84 | 23.6059 | 0.2904 | 0.1885 | 1.323 |
| MHE [14] | 51.04 | 13.9724 | 0.7529 | 0.0424 | 3.3484 | |
| 1D-GF [15] | 5.40 | 33.4841 | 0.9623 | 0.0217 | 3.4443 | |
| SNRCNN [27] | 12.28 | 26.3438 | 0.4895 | 0.1183 | 1.9014 | |
| ICSRN [28] | 8.77 | 29.2671 | 0.7530 | 0.0451 | 3.2835 | |
| DLS-NUC [29] | 5.21 | 33.8014 | 0.9490 | 0.0183 | 3.4608 | |
| SNRWDNN [30] | 3.21 | 38.0057 | 0.9864 | 0.0168 | 3.8070 | |
| Ours | 2.45 | 40.3645 | 0.9978 | 0.0156 | 3.7163 | |
| High-Intensity Nonuniformity | Noise Image | 25.62 | 19.96 | 0.1559 | 0.2914 | 0.7753 |
| MHE [14] | 56.02 | 13.16 | 0.7218 | 0.0444 | 3.4024 | |
| 1D-GF [15] | 6.06 | 32.48 | 0.9137 | 0.0334 | 3.4181 | |
| SNRCNN [27] | 21.78 | 21.37 | 0.2382 | 0.2273 | 0.8014 | |
| ICSRN [28] | 16.01 | 24.05 | 0.4009 | 0.1155 | 1.1388 | |
| DLS-NUC [29] | 7.93 | 30.14 | 0.8922 | 0.0272 | 2.7439 | |
| SNRWDNN [30] | 4.72 | 34.66 | 0.9796 | 0.0191 | 3.8752 | |
| Ours | 3.83 | 36.46 | 0.9953 | 0.0170 | 3.5277 |
| Experiment | Methods | RMSE | PSNR (dB) | SSIM | IR | SCR |
|---|---|---|---|---|---|---|
| ) | Noise Image | 14.73 | 24.7683 | 0.2990 | 0.1691 | 1.1610 |
| MHE [14] | 71.15 | 11.0873 | 0.5375 | 0.0530 | 2.3561 | |
| 1D-GF [15] | 3.78 | 36.5751 | 0.9757 | 0.0137 | 4.2120 | |
| SNRCNN [27] | 10.09 | 28.0508 | 0.5531 | 0.0946 | 1.6311 | |
| ICSRN [28] | 7.30 | 30.8667 | 0.7791 | 0.0374 | 2.9876 | |
| DLS-NUC [29] | 3.26 | 37.8533 | 0.9756 | 0.0118 | 5.4496 | |
| SNRWDNN [30] | 2.32 | 40.8198 | 0.9909 | 0.0104 | 6.1065 | |
| Ours | 1.47 | 44.8026 | 0.9984 | 0.0099 | 6.7038 | |
| ) | Noise Image | 12.63 | 26.1042 | 0.3894 | 0.2218 | 1.6516 |
| MHE [14] | 75.02 | 10.6272 | 0.6675 | 0.0518 | 2.2701 | |
| 1D-GF [15] | 3.39 | 37.5167 | 0.9799 | 0.0318 | 3.2332 | |
| SNRCNN [27] | 8.04 | 30.0243 | 0.6737 | 0.1139 | 2.0920 | |
| ICSRN [28] | 4.91 | 34.3105 | 0.9033 | 0.0429 | 3.0031 | |
| DLS-NUC [29] | 4.01 | 36.0683 | 0.9741 | 0.0285 | 3.5229 | |
| SNRWDNN [30] | 2.90 | 38.8949 | 0.9817 | 0.0286 | 3.5026 | |
| Ours | 1.98 | 42.1847 | 0.9973 | 0.0271 | 3.7157 | |
| ) | Noise Image | 15.39 | 24.3859 | 0.4616 | 0.1848 | 1.0346 |
| MHE [14] | 12.54 | 26.1627 | 0.9194 | 0.0677 | 0.6328 | |
| 1D-GF [15] | 9.23 | 28.8261 | 0.9491 | 0.0600 | 0.8926 | |
| SNRCNN [27] | 11.44 | 26.9595 | 0.6576 | 0.1227 | 1.1425 | |
| ICSRN [28] | 8.58 | 29.4648 | 0.8342 | 0.0731 | 1.2652 | |
| DLS-NUC [29] | 16.00 | 24.0461 | 0.7921 | 0.0521 | 1.2424 | |
| SNRWDNN [30] | 7.52 | 30.6026 | 0.9400 | 0.0605 | 0.8147 | |
| Ours | 2.12 | 41.6190 | 0.9958 | 0.0587 | 0.8182 | |
| Test-1–10 Average | Noise Image | 15.17 | 24.56 | 0.3562 | 0.1791 | 1.0014 |
| MHE [14] | 45.90 | 16.39 | 0.7360 | 0.0622 | 2.0396 | |
| 1D-GF [15] | 4.89 | 34.82 | 0.9667 | 0.0311 | 2.3881 | |
| SNRCNN [27] | 10.71 | 27.64 | 0.5824 | 0.1062 | 1.3462 | |
| ICSRN [28] | 7.75 | 30.59 | 0.7827 | 0.0515 | 2.0673 | |
| DLS-NUC [29] | 8.75 | 31.10 | 0.8967 | 0.0280 | 2.5928 | |
| SNRWDNN [30] | 3.89 | 36.87 | 0.9763 | 0.0293 | 2.6957 | |
| Ours | 1.87 | 42.90 | 0.9970 | 0.0275 | 2.8335 | |
| Test-1–10 Standard Deviation | Noise Image | 1.6458 | 0.9419 | 0.0578 | 0.0728 | 0.4267 |
| MHE [14] | 21.083 | 5.8496 | 0.1008 | 0.0285 | 0.9088 | |
| 1D-GF [15] | 1.8051 | 2.7607 | 0.0178 | 0.0237 | 1.2596 | |
| SNRCNN [27] | 1.6787 | 1.3723 | 0.0644 | 0.0423 | 0.5564 | |
| ICSRN [28] | 1.7758 | 2.0871 | 0.0887 | 0.0229 | 1.0465 | |
| DLS-NUC [29] | 6.3683 | 5.3226 | 0.0930 | 0.0226 | 1.4446 | |
| SNRWDNN [30] | 1.4669 | 2.9825 | 0.0141 | 0.0250 | 1.5914 | |
| Ours | 0.3615 | 1.9141 | 0.0012 | 0.0229 | 1.6913 |
| Methods | Real Data 1 | Real Data 2 | ||||
|---|---|---|---|---|---|---|
| IR | ICV | MRD | IR | ICV | MRD | |
| Noise Image | 0.1309 | 2.0711 | 0.2907 | 2.4919 | ||
| MHE [14] | 0.0859 | 1.9908 | 0.0647 | 0.1772 | 2.4026 | 1.9515 |
| 1D-GF [15] | 0.0786 | 2.0977 | 0.0647 | 0.1557 | 2.6051 | 0.2139 |
| SNRCNN [27] | 0.0803 | 2.0942 | 0.0501 | 0.1651 | 2.5885 | 0.1627 |
| ICSRN [28] | 0.0537 | 2.1001 | 0.0676 | 0.1097 | 2.588 | 0.2167 |
| DLS-NUC [29] | 0.0591 | 2.1453 | 0.0930 | 0.1142 | 2.6736 | 0.3349 |
| SNRWDNN [30] | 0.0790 | 2.0897 | 0.0648 | 0.1573 | 2.6013 | 0.2228 |
| Ours | 0.0792 | 2.1017 | 0.0649 | 0.1574 | 2.6247 | 0.2303 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, T.; Yin, Q.; Cao, F.; Li, M.; Lin, Z.; An, W. Noise Parameter Estimation Two-Stage Network for Single Infrared Dim Small Target Image Destriping. Remote Sens. 2022, 14, 5056. https://doi.org/10.3390/rs14195056
Wang T, Yin Q, Cao F, Li M, Lin Z, An W. Noise Parameter Estimation Two-Stage Network for Single Infrared Dim Small Target Image Destriping. Remote Sensing. 2022; 14(19):5056. https://doi.org/10.3390/rs14195056
Chicago/Turabian StyleWang, Teliang, Qian Yin, Fanzhi Cao, Miao Li, Zaiping Lin, and Wei An. 2022. "Noise Parameter Estimation Two-Stage Network for Single Infrared Dim Small Target Image Destriping" Remote Sensing 14, no. 19: 5056. https://doi.org/10.3390/rs14195056