
SAR Tomography Based on Atomic Norm Minimization in Urban Areas

Abstract
:
1. Introduction
2. Methodology
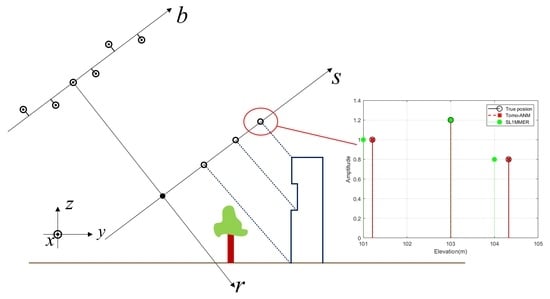
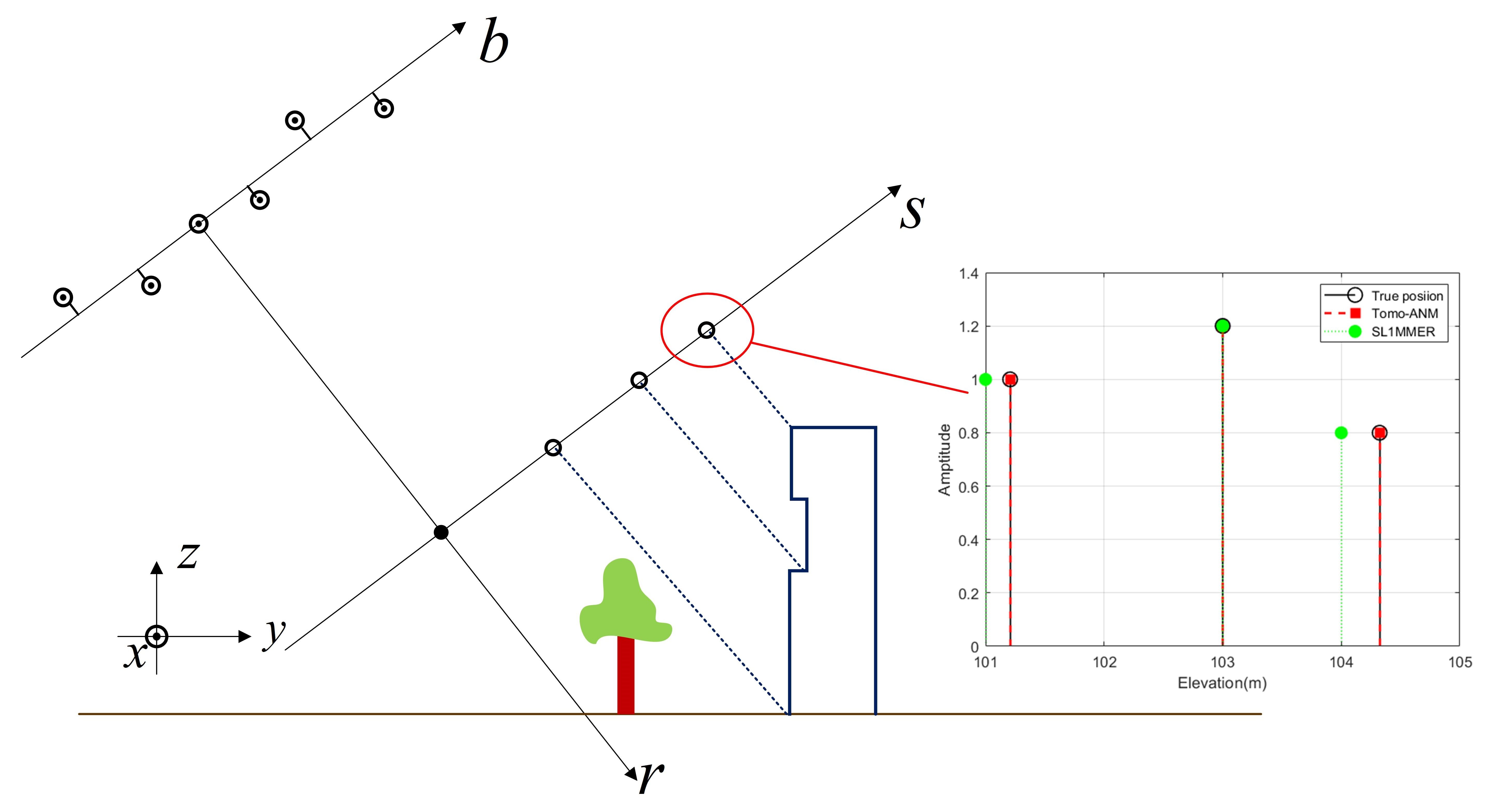
2.1. Tomographic SAR Imaging Model
2.2. Atomic Norm Minimization Theory
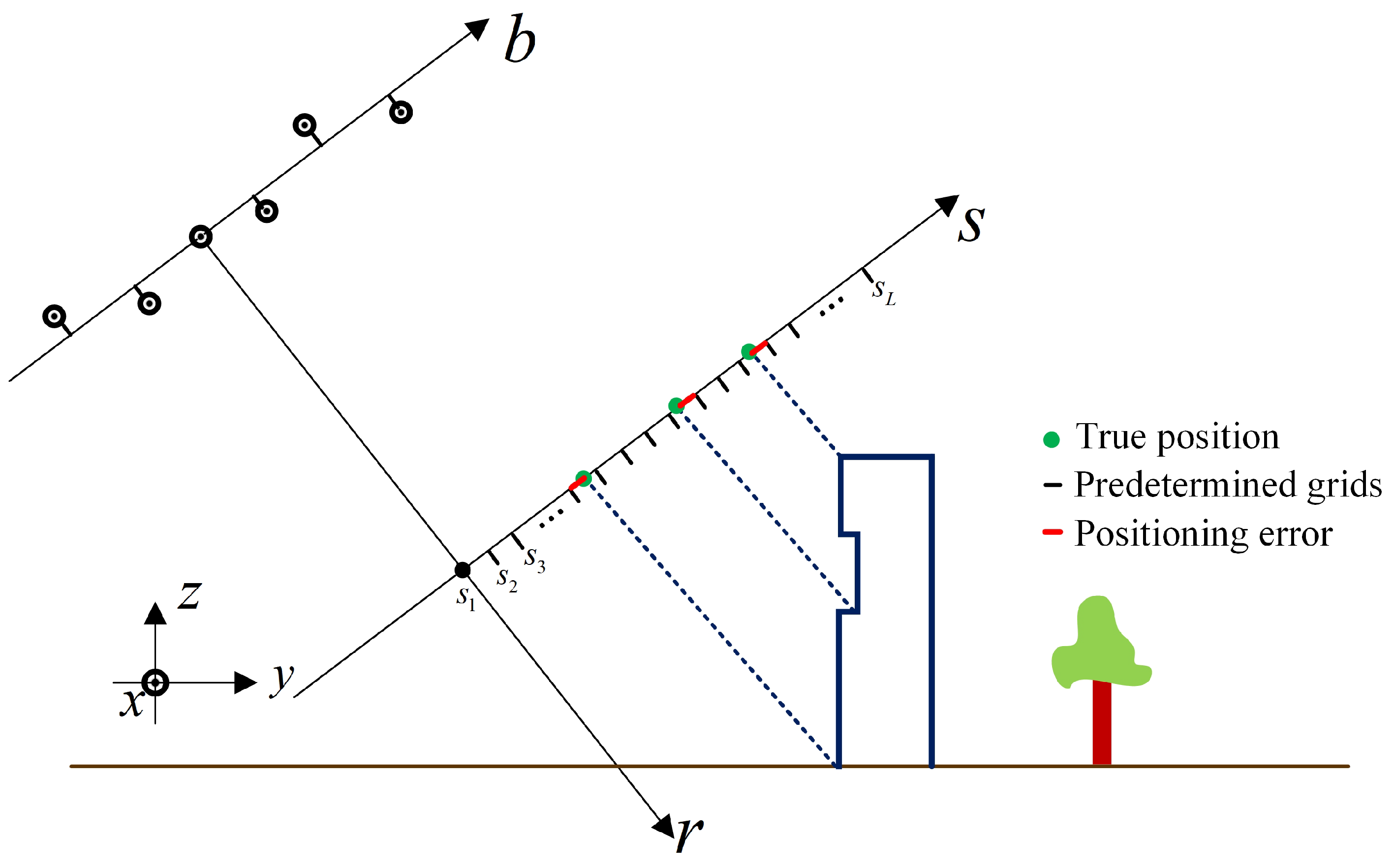
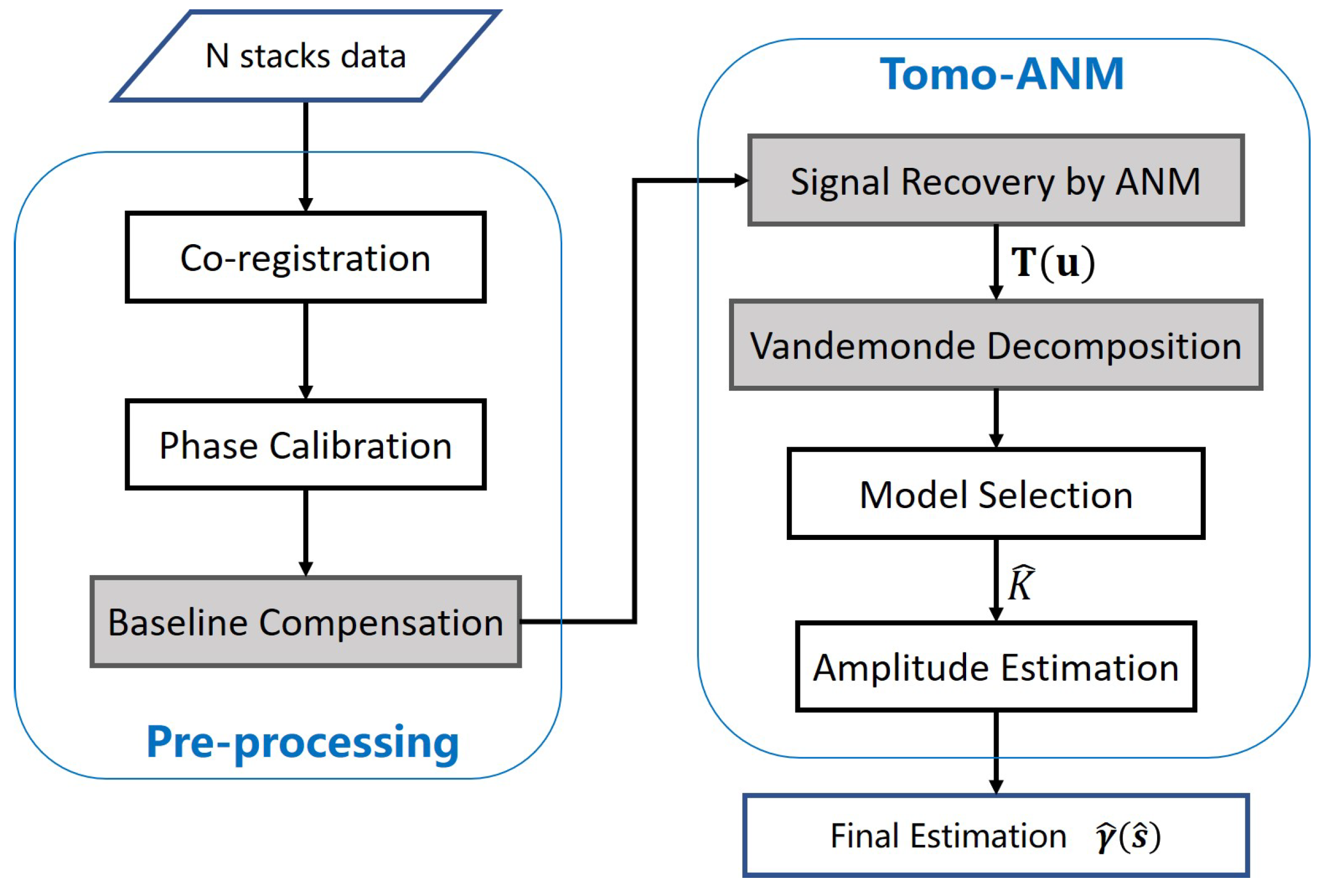
2.3. TomoSAR Algorithm Based on Atomic Norm Minimization
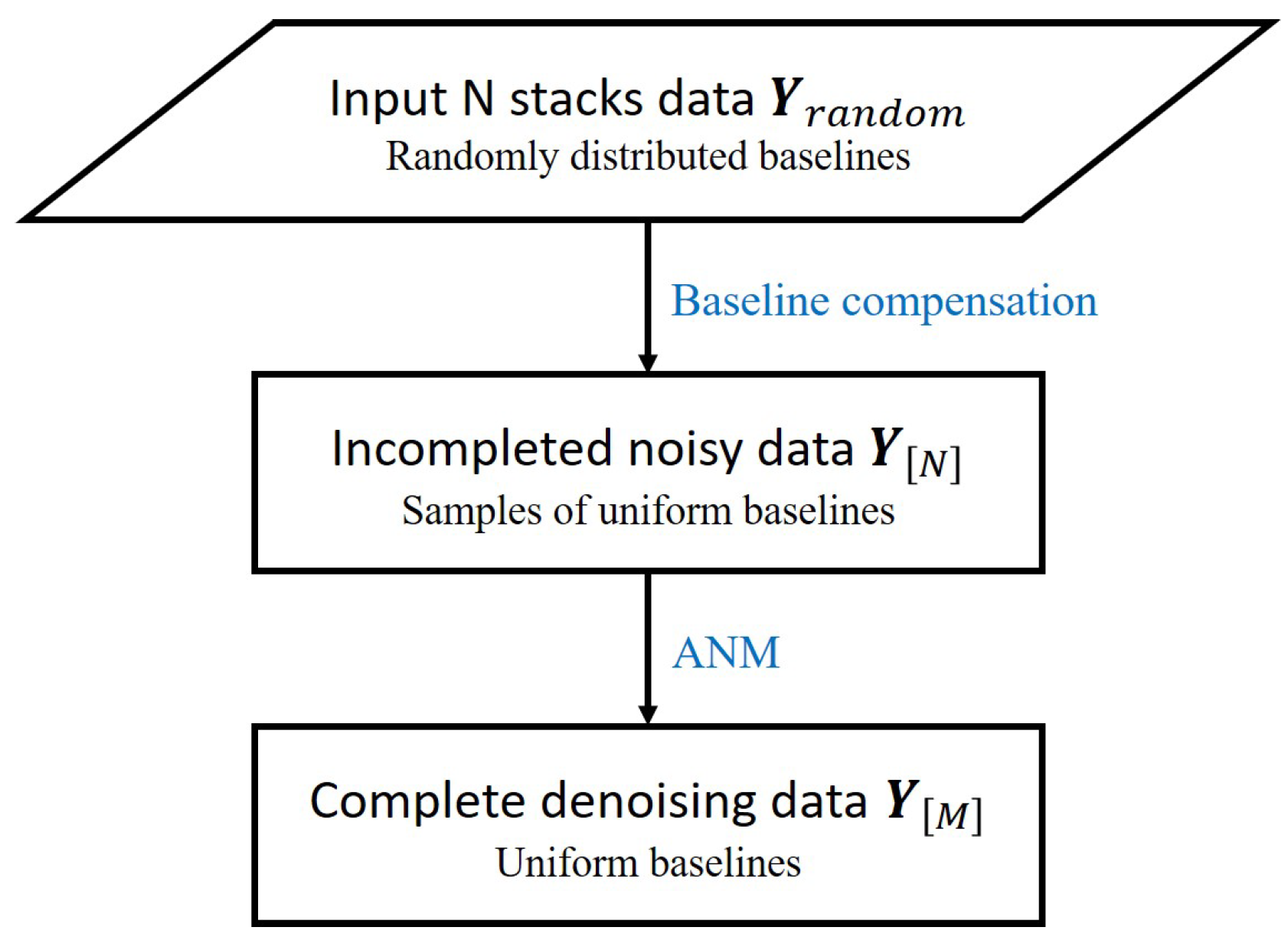
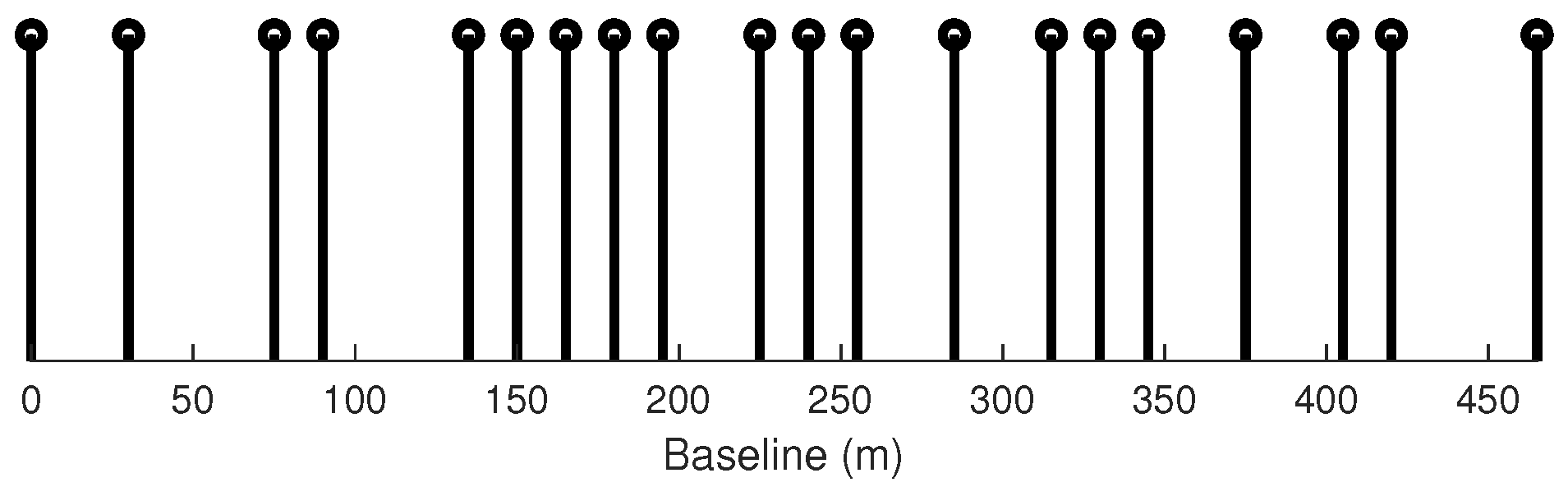
2.3.1. Baseline Compensation
2.3.2. Signal Recovery by ANM
2.3.3. Vandemonde Decomposition
2.3.4. Model Selection and Amplitude Estimation
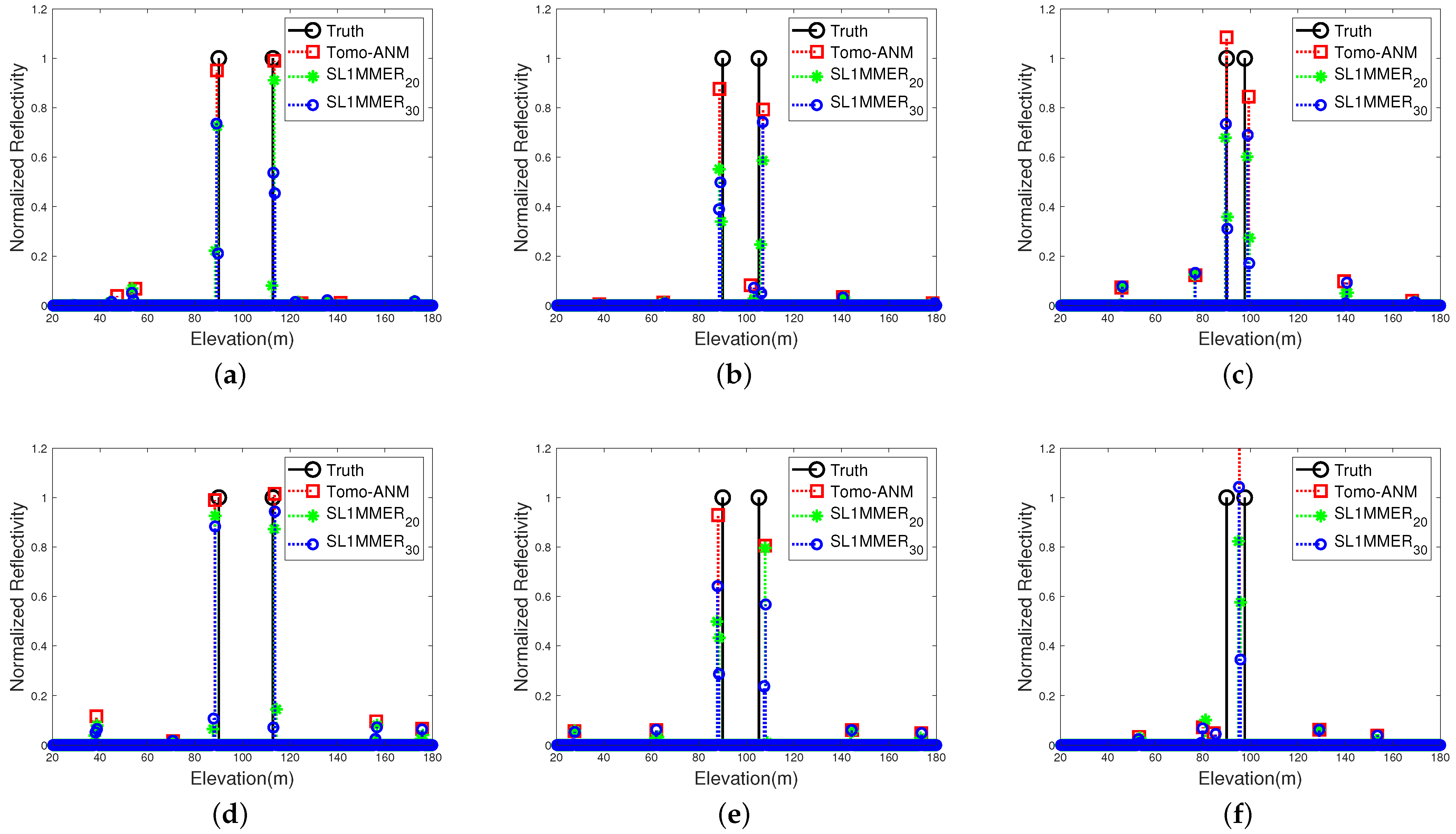
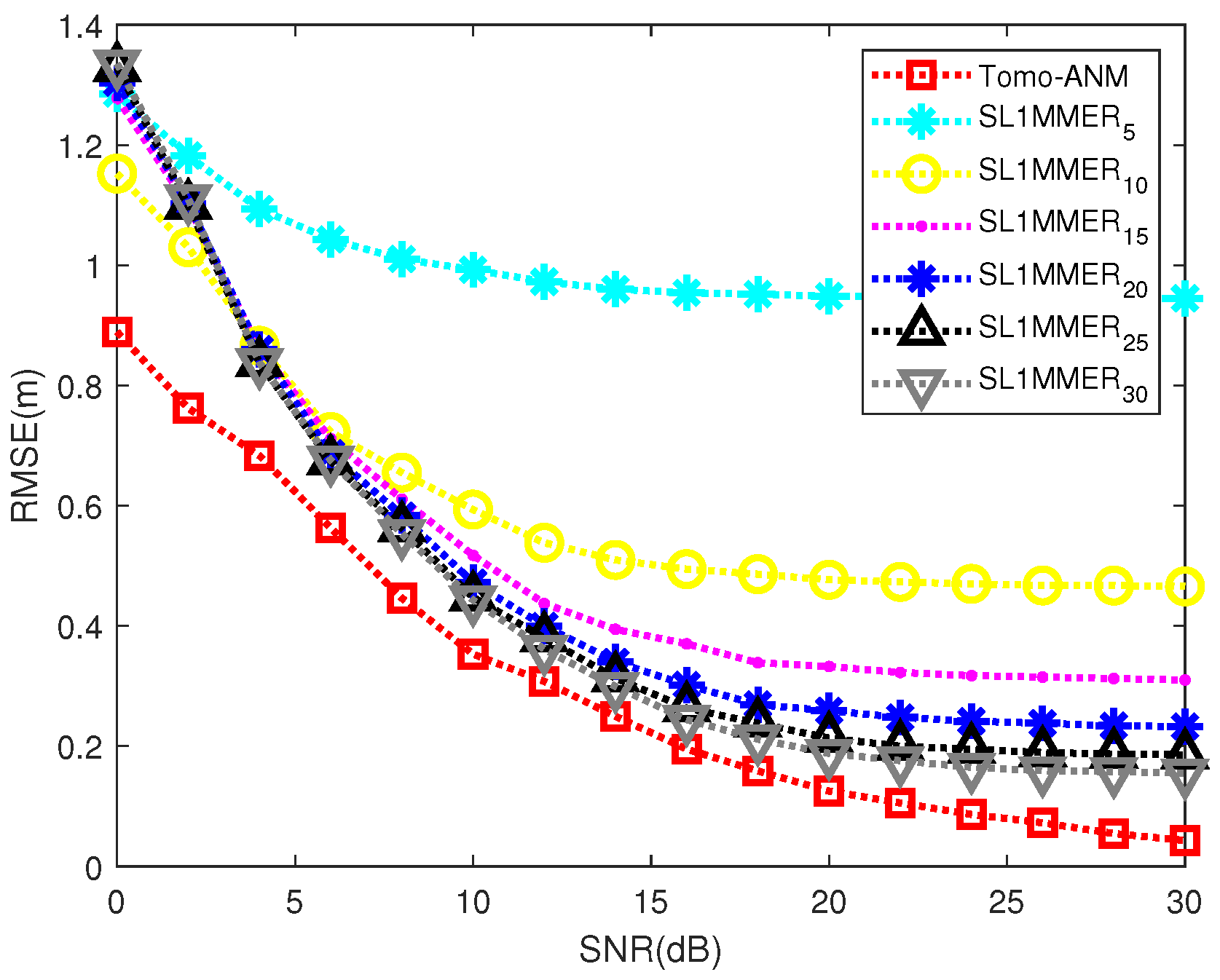
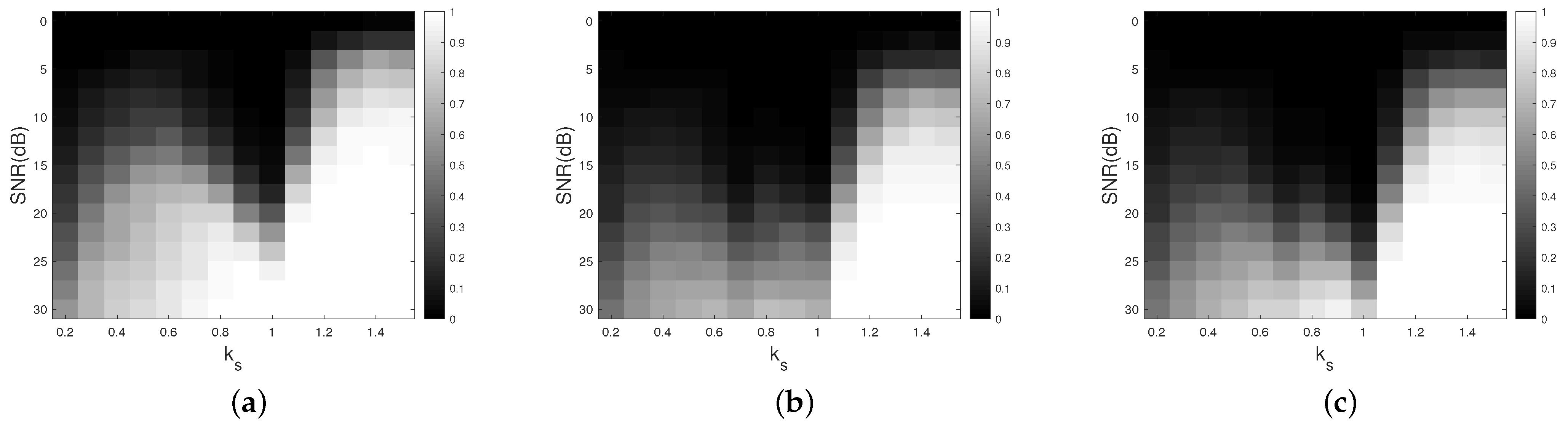
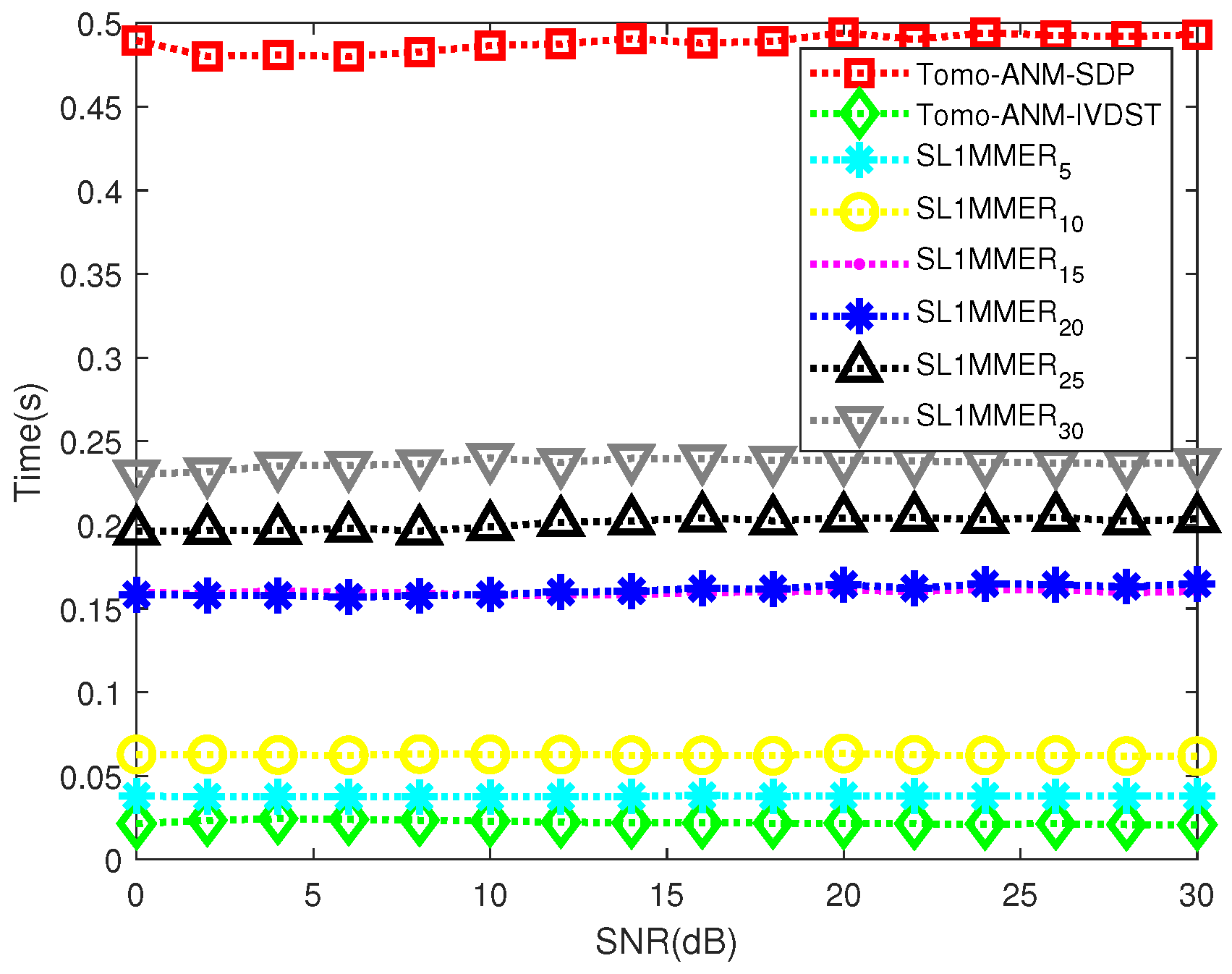
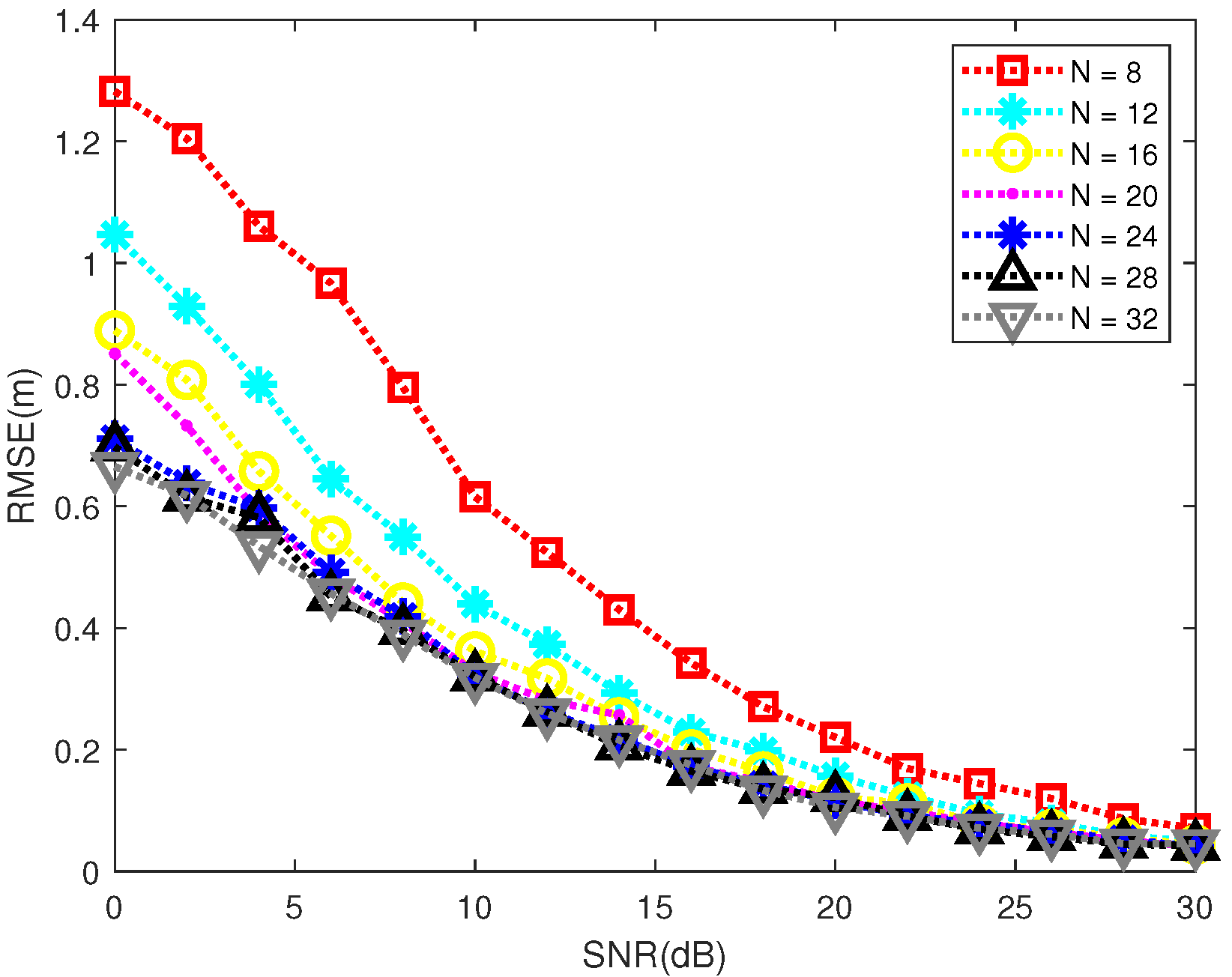
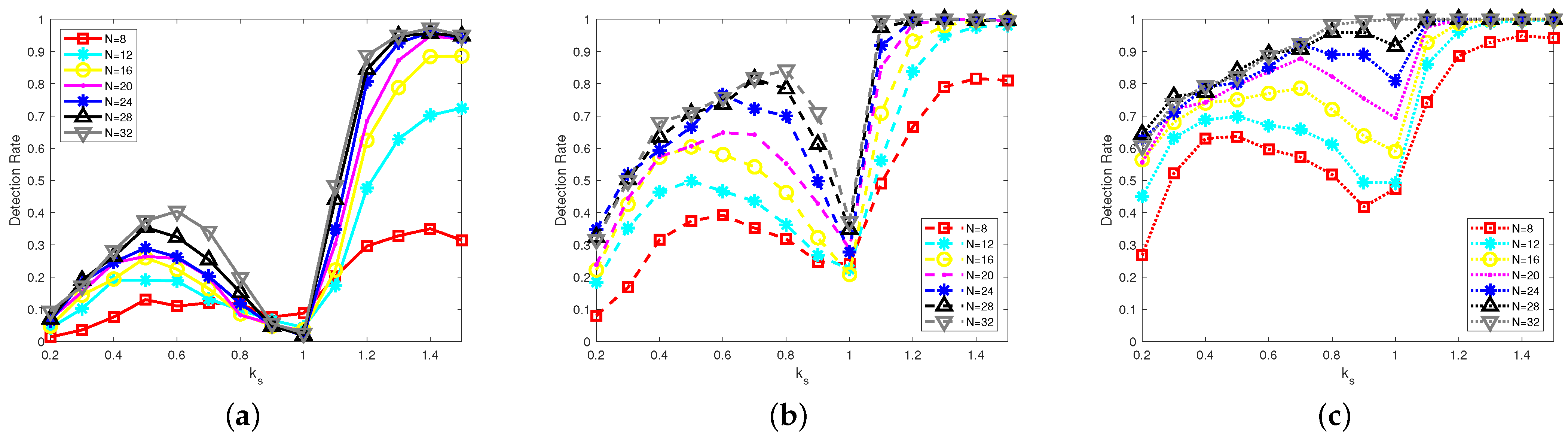
3. Simulation Results
4. Real Data Results
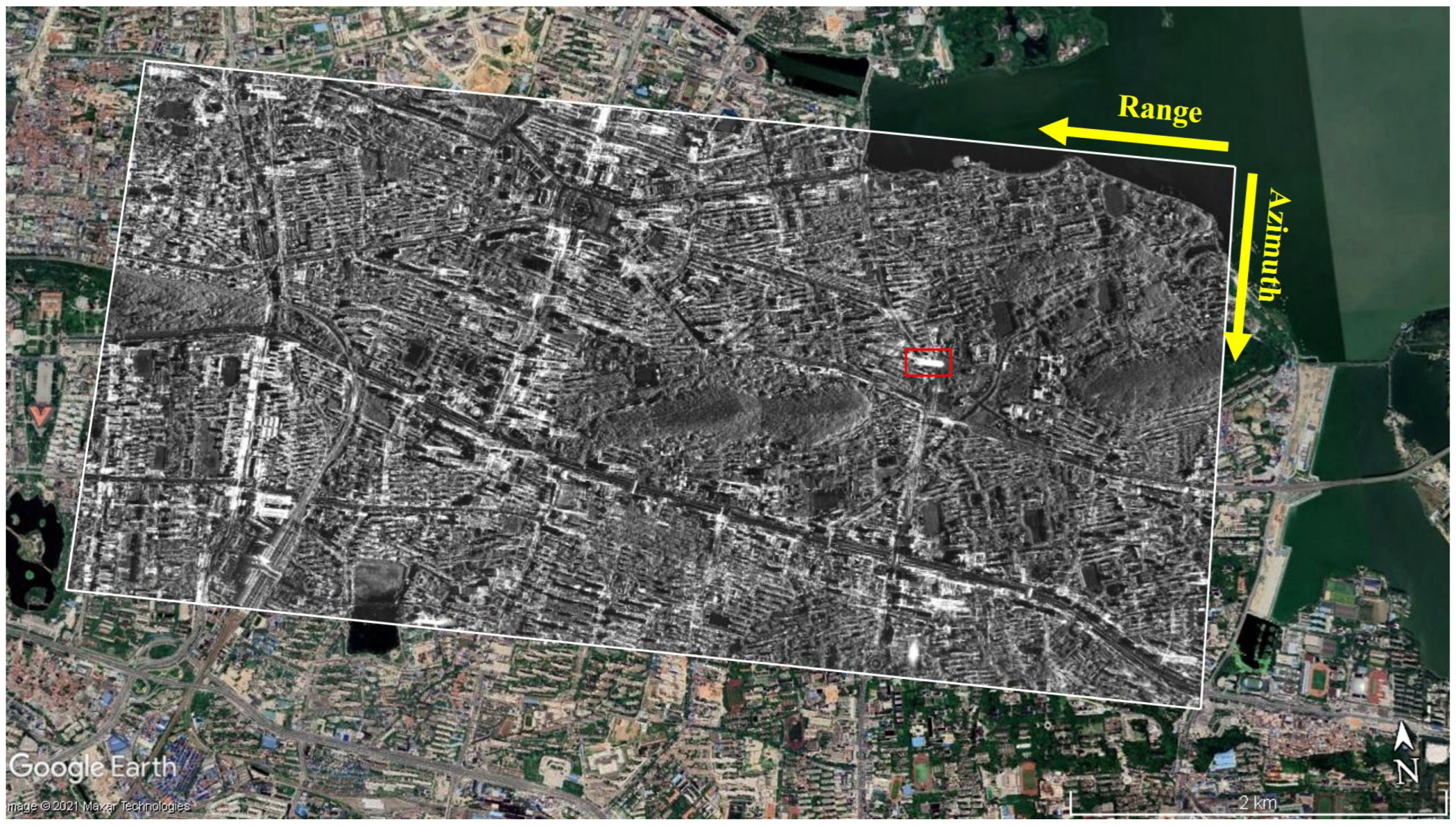
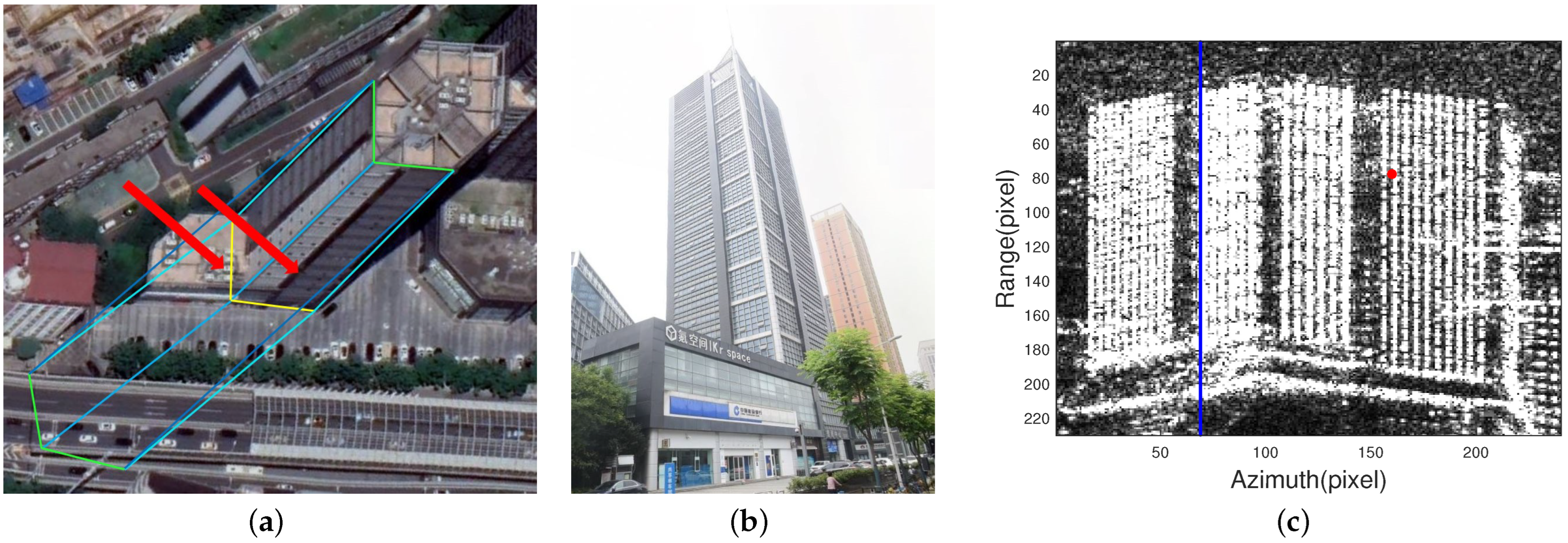
4.1. Datasets
4.2. Results
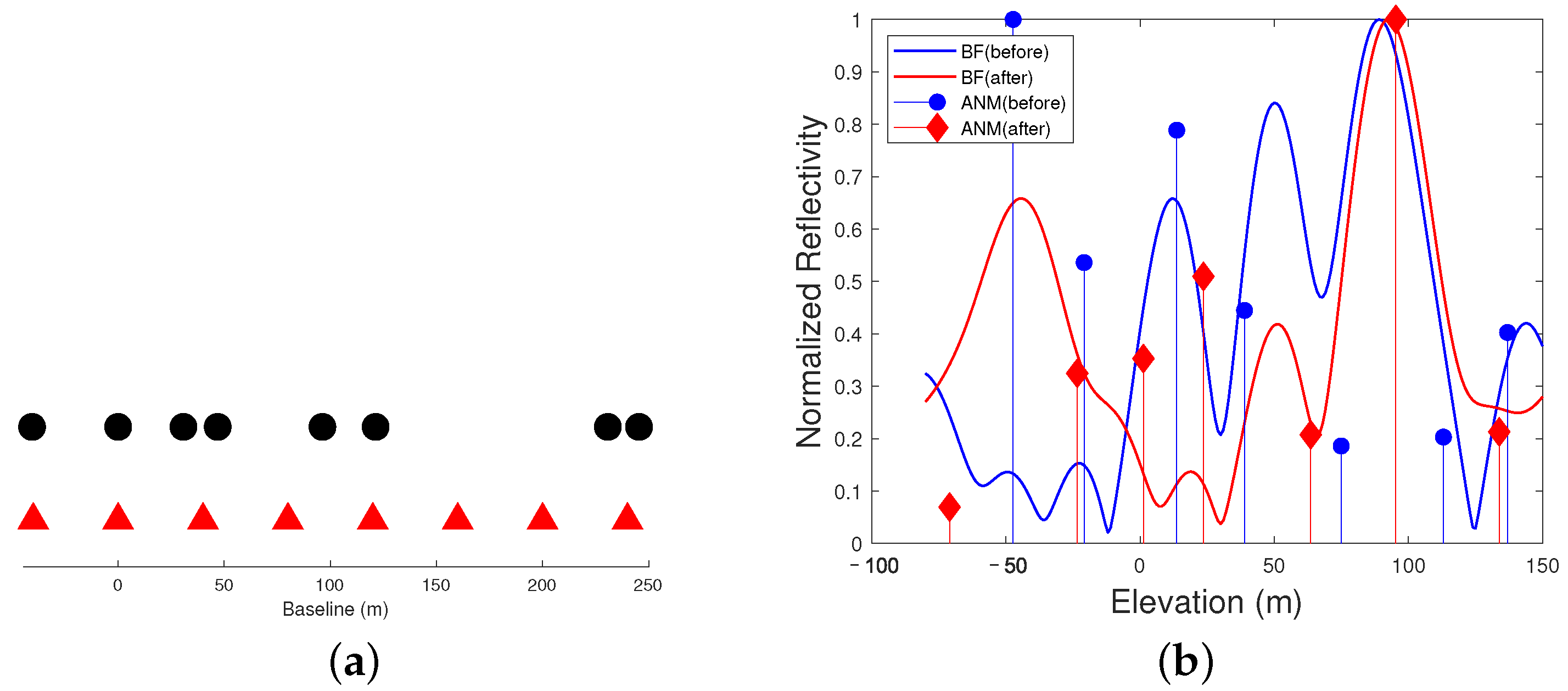
4.2.1. Baseline Compensation
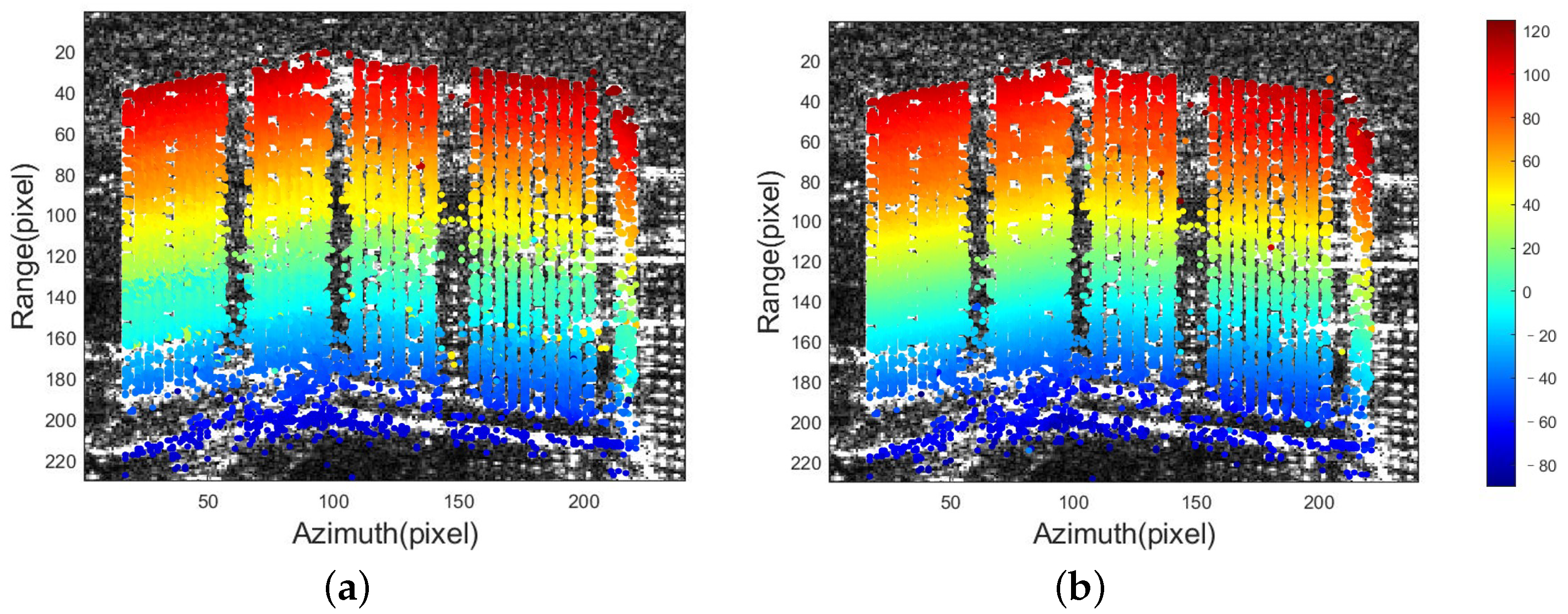
4.2.2. Tomographic Profiles
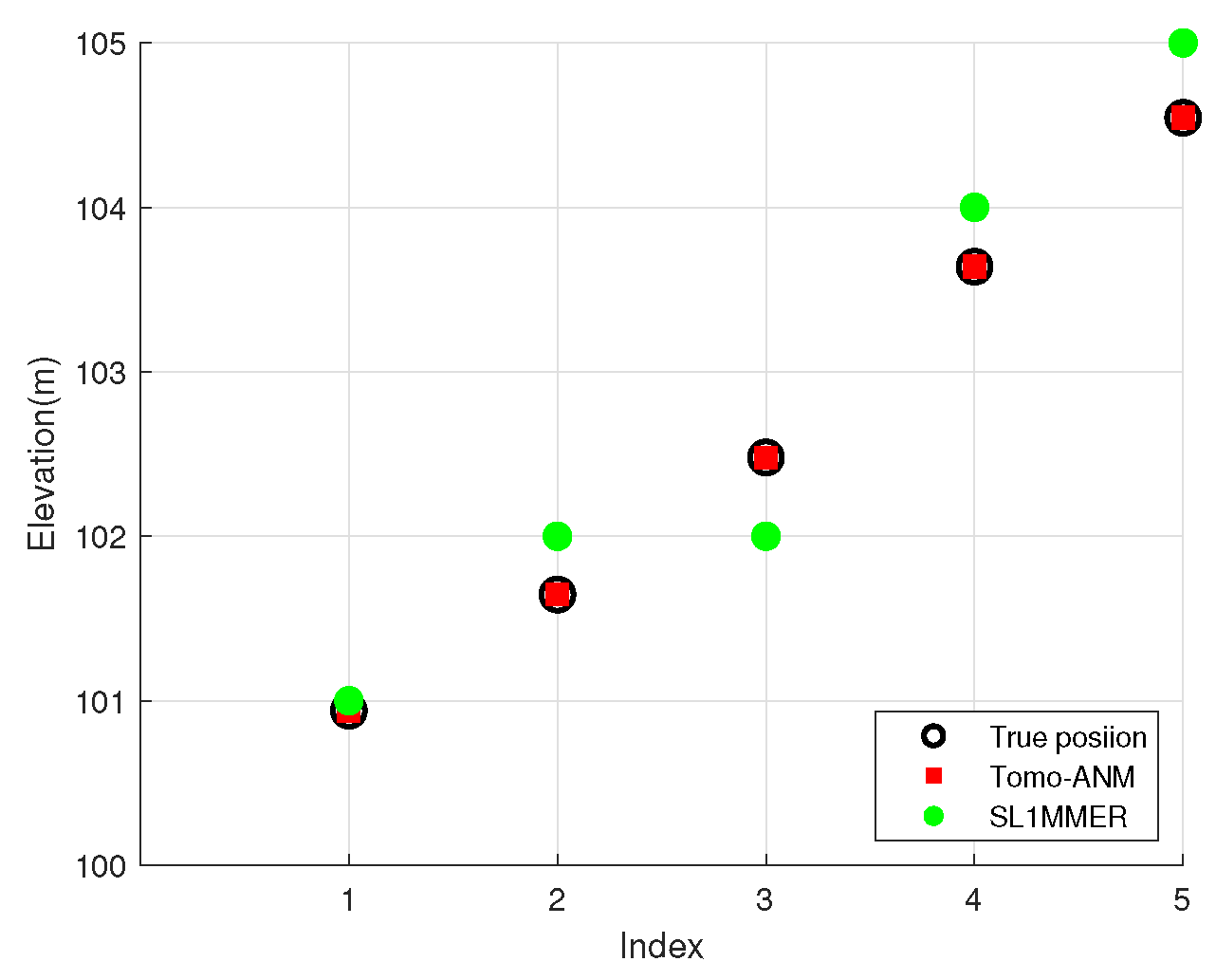
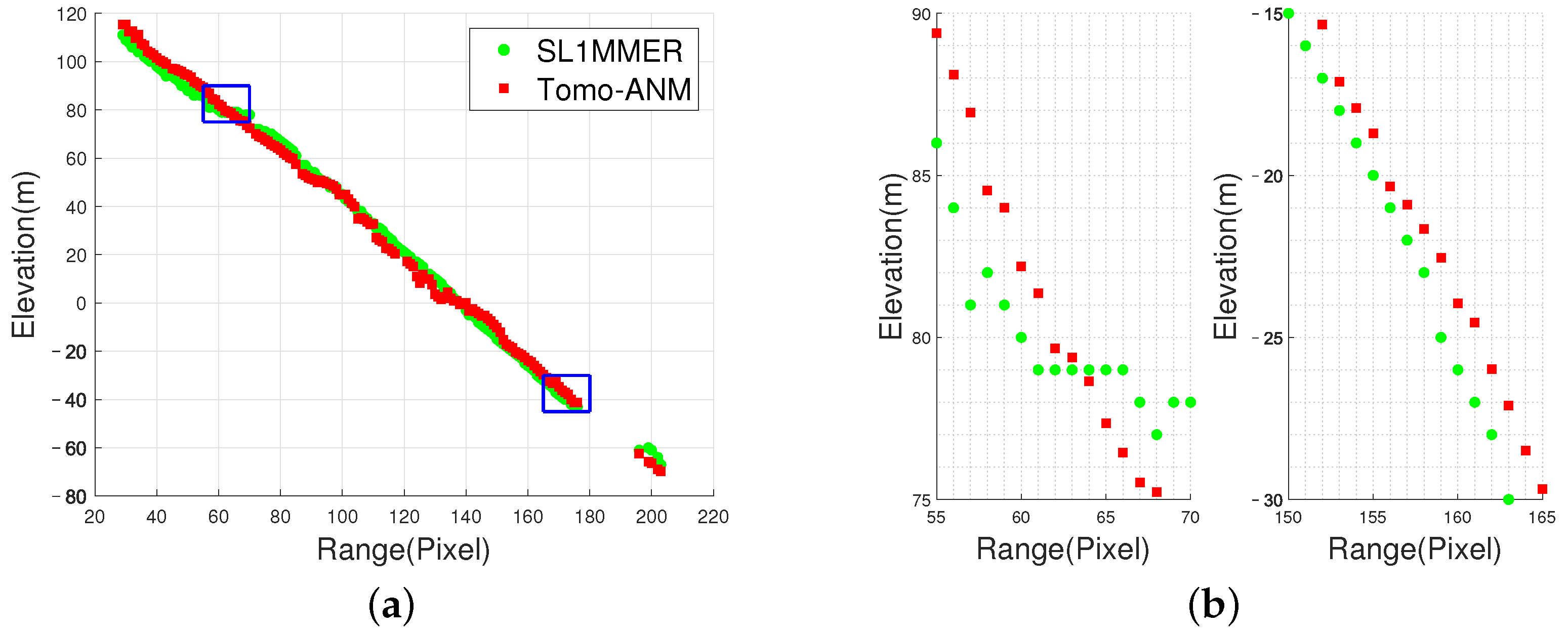
4.2.3. Height Estimation of the Building
5. Discussion
5.1. Performance of Tomo-ANM under Different Samples
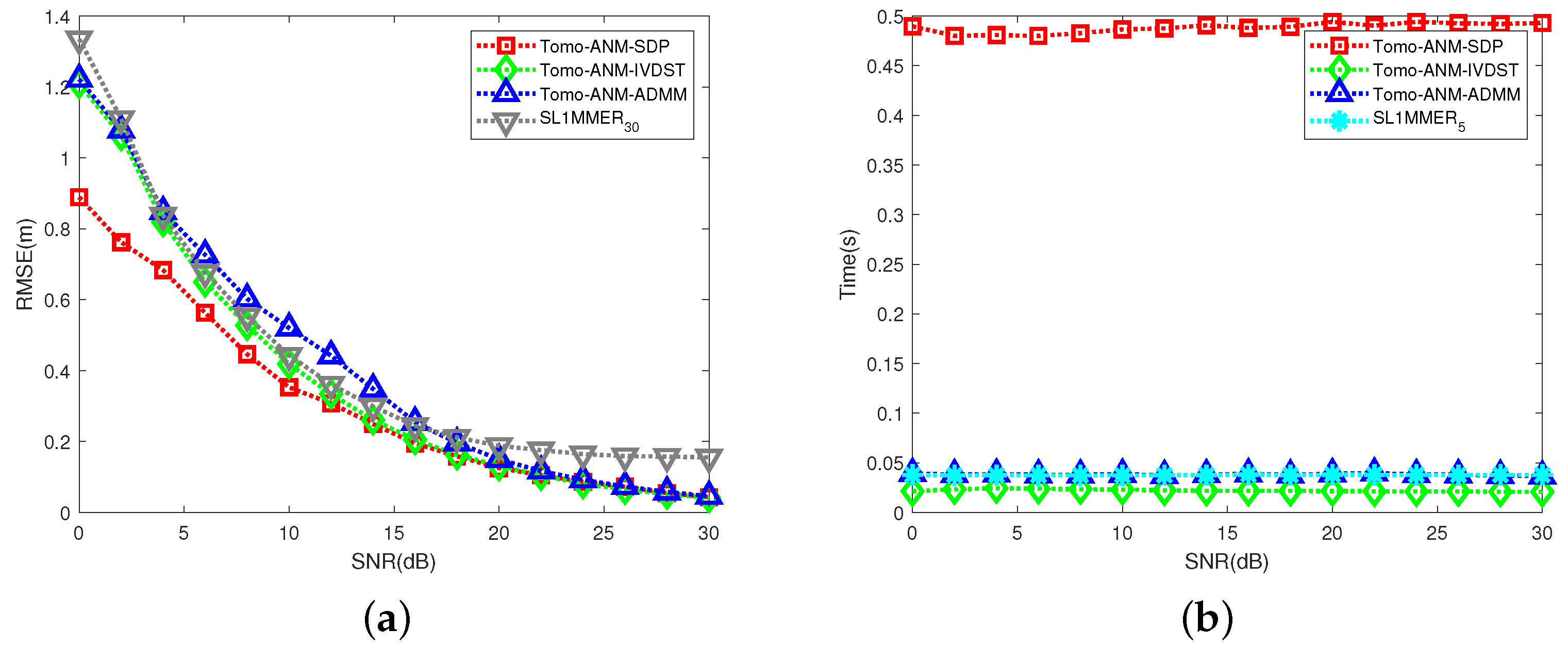
5.2. Comparison between IVDST and ADMM
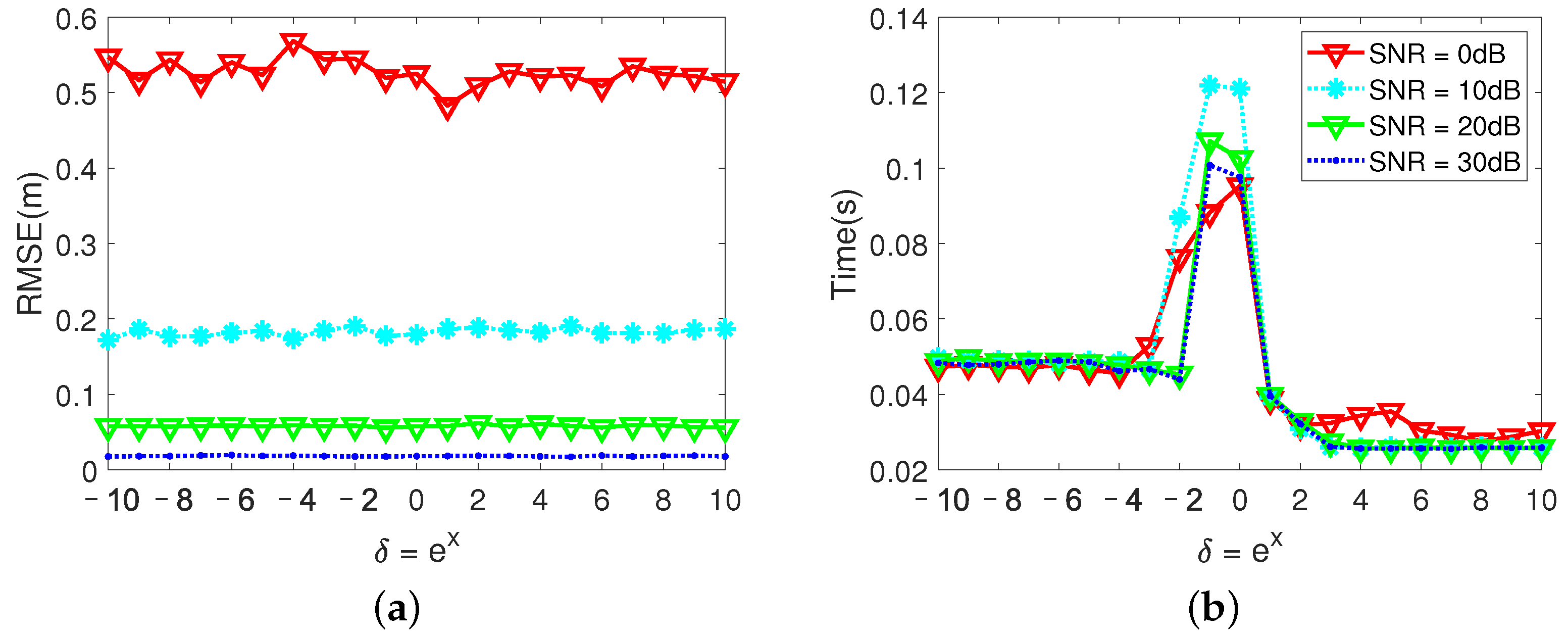
5.3. Parameter Settings of Tomo-ANM
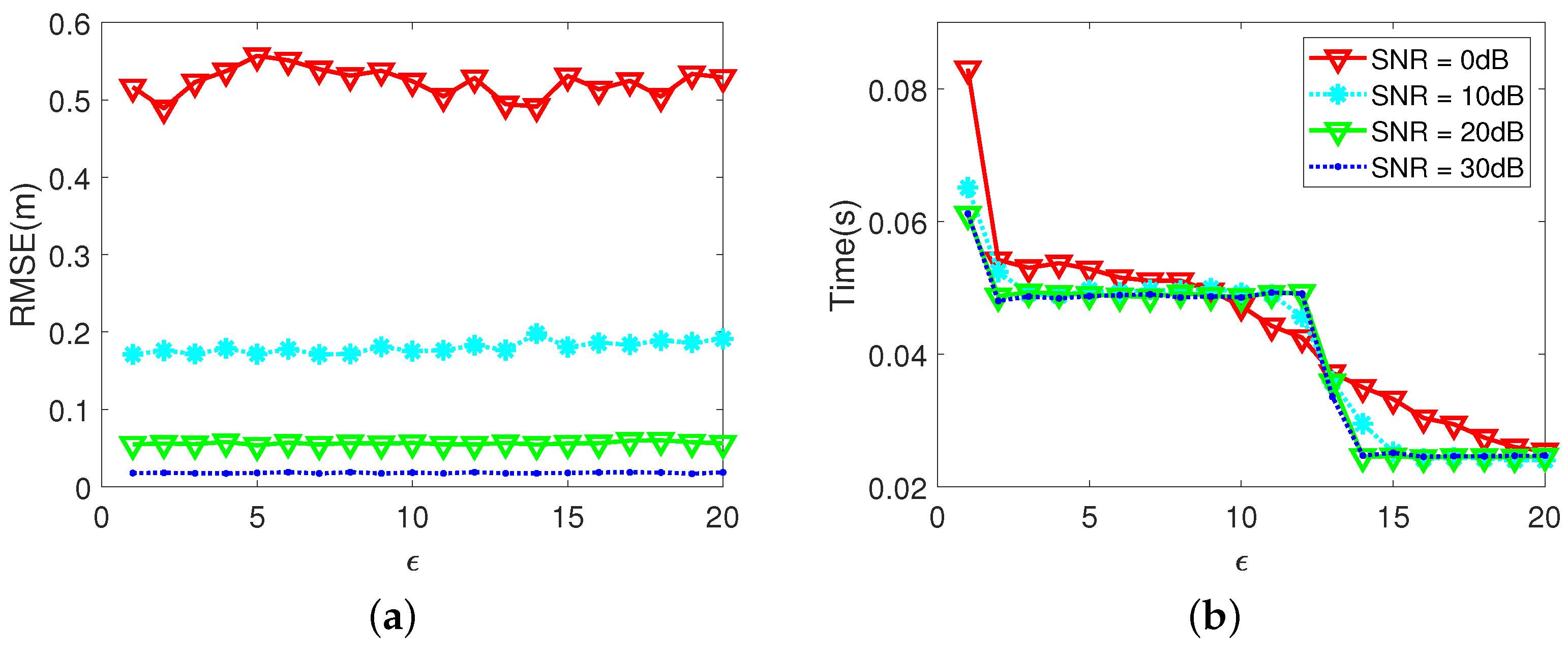
5.3.1. Tomo-ANM-SDP
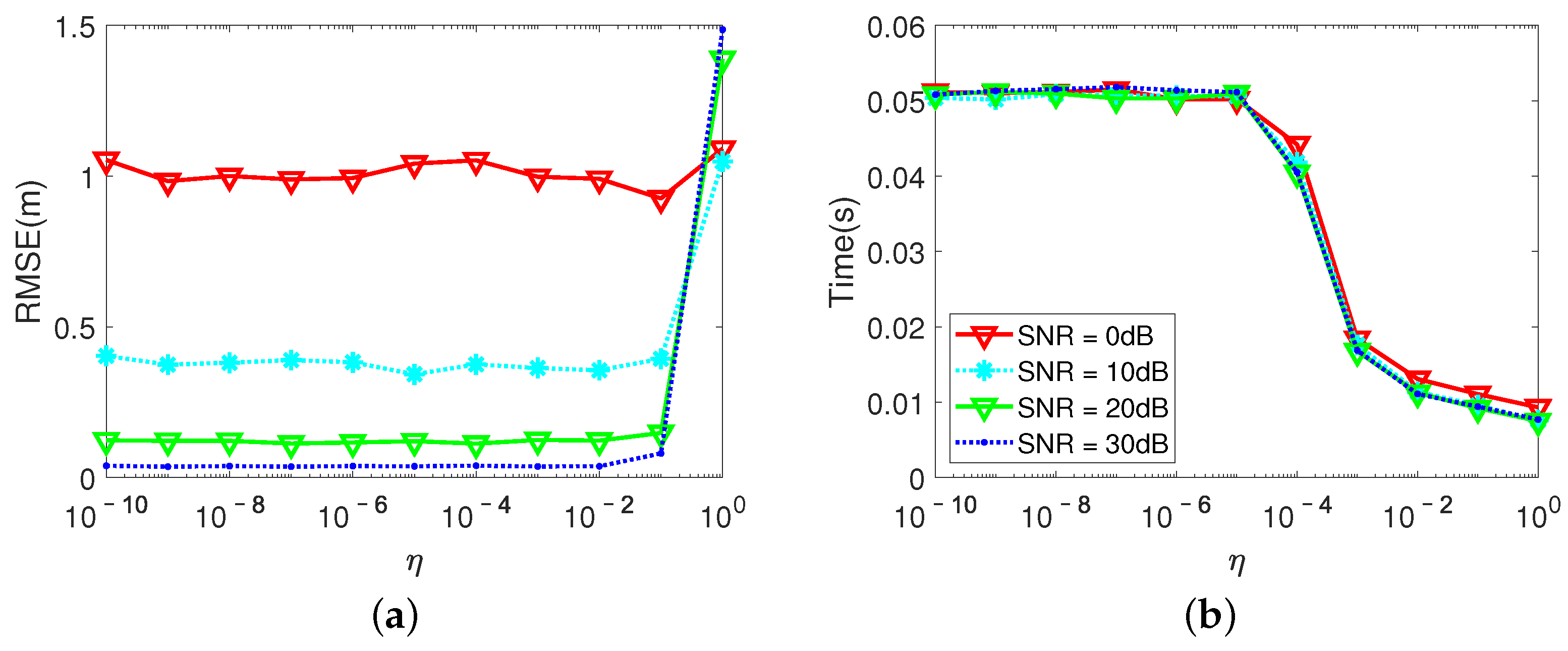
5.3.2. Tomo-ANM-IVDST
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Reigber, A.; Moreira, A. First demonstration of airborne SAR tomography using multibaseline L-band data. IEEE Trans. Geosci. Remote Sens. 2000, 38, 2142–2152. [Google Scholar] [CrossRef]
- She, Z.; Gray, D.; Bogner, R.; Homer, J. Three-dimensional SAR imaging via multiple pass processing. In Proceedings of the IEEE 1999 International Geoscience and Remote Sensing Symposium. IGARSS’99 (Cat. No.99CH36293), Hamburg, Germany, 28 June–2 July 1999; Volume 5, pp. 2389–2391. [Google Scholar] [CrossRef]
- Sauer, S.; Ferro-Famil, L.; Reigber, A.; Pottier, E. Three-Dimensional Imaging and Scattering Mechanism Estimation Over Urban Scenes Using Dual-Baseline Polarimetric InSAR Observations at L-Band. IEEE Trans. Geosci. Remote Sens. 2011, 49, 4616–4629. [Google Scholar] [CrossRef] [Green Version]
- Lombardini, F.; Reigber, A. Adaptive spectral estimation for multibaseline SAR tomography with airborne L-band data. In Proceedings of the IGARSS 2003—2003 IEEE International Geoscience and Remote Sensing Symposium (IEEE Cat. No.03CH37477), Toulouse, France, 21–25 July 2003; Volume 3, pp. 2014–2016. [Google Scholar] [CrossRef]
- Gini, F.; Lombardini, F. Multibaseline cross-track SAR interferometry: A signal processing perspective. IEEE Aerosp. Electron. Syst. Mag. 2005, 20, 71–93. [Google Scholar] [CrossRef]
- Guillaso, S.; Reigber, A. Scatterer characterisation using polarimetric SAR tomography. In Proceedings of the 2005 IEEE International Geoscience and Remote Sensing Symposium, IGARSS’05, Seoul, Korea, 29 July 2005; Volume 4, pp. 2685–2688. [CrossRef]
- Fornaro, G.; Lombardini, F.; Serafino, F. Three-dimensional multipass SAR focusing: Experiments with long-term spaceborne data. IEEE Trans. Geosci. Remote Sens. 2005, 43, 702–714. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Tomographic SAR Inversion by L1 -Norm Regularization—The Compressive Sensing Approach. IEEE Trans. Geosci. Remote Sens. 2010, 48, 3839–3846. [Google Scholar] [CrossRef] [Green Version]
- Budillon, A.; Evangelista, A.; Schirinzi, G. Three-Dimensional SAR Focusing From Multipass Signals Using Compressive Sampling. IEEE Trans. Geosci. Remote Sens. 2011, 49, 488–499. [Google Scholar] [CrossRef]
- Dong, X.; Zhang, Y. A Novel Compressive Sensing Algorithm for SAR Imaging. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2014, 7, 708–720. [Google Scholar] [CrossRef]
- Kang, M.S.; Kim, K.T. Compressive Sensing Based SAR Imaging and Autofocus Using Improved Tikhonov Regularization. IEEE Sens. J. 2019, 19, 5529–5540. [Google Scholar] [CrossRef]
- Zhu, X.X.; Bamler, R. Super-Resolution Power and Robustness of Compressive Sensing for Spectral Estimation With Application to Spaceborne Tomographic SAR. IEEE Trans. Geosci. Remote Sens. 2012, 50, 247–258. [Google Scholar] [CrossRef]
- Chi, Y.; Scharf, L.L.; Pezeshki, A.; Calderbank, A.R. Sensitivity to Basis Mismatch in Compressed Sensing. IEEE Trans. Signal Process. 2011, 59, 2182–2195. [Google Scholar] [CrossRef]
- Tang, G.; Bhaskar, B.N.; Shah, P.; Recht, B. Compressed Sensing Off the Grid. IEEE Trans. Inf. Theory 2013, 59, 7465–7490. [Google Scholar] [CrossRef] [Green Version]
- Candès, E.J.; Fernandez-Granda, C. Towards a Mathematical Theory of Super-Resolution. Commun. Pure Appl. Math. 2012, 67, 906–956. [Google Scholar] [CrossRef] [Green Version]
- Lei, Y.; Zhou, J.; Xiao, H. Super-resolution radar imaging using fast continuous compressed sensing. Electron. Lett. 2015, 51, 2043–2045. [Google Scholar] [CrossRef]
- Tang, W.G.; Jiang, H.; Pang, S.X. Grid-Free DOD and DOA Estimation for MIMO Radar via Duality-Based 2D Atomic Norm Minimization. IEEE Access 2019, 7, 60827–60836. [Google Scholar] [CrossRef]
- Feng, W.; Guo, Y.; Zhang, Y.; Gong, J. Airborne radar space time adaptive processing based on atomic norm minimization. Signal Process. 2018, 148, 31–40. [Google Scholar] [CrossRef]
- Su, Y.; Wang, T.; Tao, F.; Li, Z. A Grid-Less Total Variation Minimization-Based Space-Time Adaptive Processing for Airborne Radar. IEEE Access 2020, 8, 29334–29343. [Google Scholar] [CrossRef]
- Bao, Q.; Han, K.; Lin, Y.; Zhang, B.; Liu, J.; Hong, W. Imaging method for downward-looking sparse linear array three-dimensional synthetic aperture radar based on reweighted atomic norm. J. Appl. Remote Sens. 2016, 10, 015008. [Google Scholar] [CrossRef]
- Lombardini, F.; Pardini, M. 3-D SAR Tomography: The Multibaseline Sector Interpolation Approach. IEEE Geosci. Remote Sens. Lett. 2008, 5, 630–634. [Google Scholar] [CrossRef]
- Bhaskar, B.N.; Tang, G.; Recht, B. Atomic Norm Denoising With Applications to Line Spectral Estimation. IEEE Trans. Signal Process. 2013, 61, 5987–5999. [Google Scholar] [CrossRef] [Green Version]
- Yang, Z.; Xie, L. On Gridless Sparse Methods for Line Spectral Estimation From Complete and Incomplete Data. IEEE Trans. Signal Process. 2015, 63, 3139–3153. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Tian, Z. IVDST: A Fast Algorithm for Atomic Norm Minimization in Line Spectral Estimation. IEEE Signal Process. Lett. 2018, 25, 1715–1719. [Google Scholar] [CrossRef]
- Chandrasekaran, V.; Recht, B.; Parrilo, P.A.; Willsky, A.S. The Convex Geometry of Linear Inverse Problems. Found. Comput. Math. 2012, 12, 805–849. [Google Scholar] [CrossRef]
- Tütüncü, R.H.; Toh, K.C.; Todd, M.J. SDPT3—A MATLAB Software Package for Semidefinite-Quadratic-Linear Programming, Version 3.0. 2001. Available online: https://www.researchgate.net/profile/Kim-Chuan-Toh/publication/2387024_SDPT3_-_a_MATLAB_software_package_for_semidefinite-quadratic-linear_programming_version_30/links/0deec51d3ef2f1859f000000/SDPT3-a-MATLAB-software-package-for-semidefinite-quadratic-linear-programming-version-30.pdf (accessed on 10 January 2021).
- Peng, X.; Wang, C.; Li, X.; Du, Y.; Fu, H.; Yang, Z.; Xie, Q. Three-Dimensional Structure Inversion of Buildings with Nonparametric Iterative Adaptive Approach Using SAR Tomography. Remote Sens. 2018, 10, 1004. [Google Scholar] [CrossRef] [Green Version]
- Schwarz, G. Estimating the Dimension of a Model. Ann. Stat. 1978, 6, 461–464. [Google Scholar] [CrossRef]
- Wax, M.; Kailath, T. Detection of signals by information theoretic criteria. IEEE Trans. Acoust. Speech Signal Process. 1985, 33, 387–392. [Google Scholar] [CrossRef] [Green Version]
- Wei, L.; Feng, Q.; Liu, S.; Bignami, C.; Tolomei, C.; Zhao, D. Minimum Redundancy Array—A Baseline Optimization Strategy for Urban SAR Tomography. Remote Sens. 2020, 12, 3100. [Google Scholar] [CrossRef]
- Li, Z.; Wang, T. ADMM-Based Low-Complexity Off-Grid Space-Time Adaptive Processing Methods. IEEE Access 2020, 8, 206646–206658. [Google Scholar] [CrossRef]
- Wei, Z.; Wang, W.; Dong, F.; Liu, Q. Gridless One-Bit Direction-of-Arrival Estimation Via Atomic Norm Denoising. IEEE Commun. Lett. 2020, 24, 2177–2181. [Google Scholar] [CrossRef]
- Bao, Q.; Peng, X.; Wang, Z.; Lin, Y.; Hong, W. DLSLA 3-D SAR Imaging Based on Reweighted Gridless Sparse Recovery Method. IEEE Geosci. Remote Sens. Lett. 2016, 13, 841–845. [Google Scholar] [CrossRef]
- Yang, Z.; Xie, L. Enhancing Sparsity and Resolution via Reweighted Atomic Norm Minimization. IEEE Trans. Signal Process. 2016, 64, 995–1006. [Google Scholar] [CrossRef]
- Liu, N.; Li, X.; Li, F.; Hong, W. Sar Tomography Based on Reweighted Atomic Norm Minimization. In Proceedings of the 2021 IEEE International Geoscience and Remote Sensing Symposium IGARSS, Brussels, Belgium, 11–16 July 2021; pp. 3097–3100. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Imaging Mode | Wavelength (m) | Slant Range (m) | Incidence Angle | Range Resolution (m) | Azimuth Resolution (m) |
|---|---|---|---|---|---|
| ST | 0.031 | 588,303.75 | 30.83 | 0.59 | 0.23 |
| Acquisition Date | Space Baseline (m) |
|---|---|
| 28 June 2014 5 October 2014 24 May 2015 15 June 2015 29 July 2015 20 August 2015 25 October 2015 10 January 2016 | 245.43 30.76 230.73 121.32 0 46.90 96.25 −40.55 |
| Height 1 (m) | Height 2 (m) | Height 3 (m) | Height 4 (m) | Height 5 (m) | Average Height (m) | Estimation Error | |
|---|---|---|---|---|---|---|---|
| Tomo-ANM-SDP | 96.28 | 96.02 | 96.32 | 96.95 | 97.52 | 96.62 | |
| Tomo-ANM-IVDST | 96.10 | 94.56 | 97.33 | 94.26 | 96.25 | 95.70 | |
| SL1MMER | 92.25 | 93.79 | 92.25 | 90.20 | 90.71 | 91.84 |
| Height Estimation (m) | Estimation Error | Running Time (min) | |
|---|---|---|---|
| Tomo-ANM-IVDST | 95.70 | 1.4 | |
| Tomo-ANM-ADMM | 94.10 | 1.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, N.; Li, X.; Peng, X.; Hong, W. SAR Tomography Based on Atomic Norm Minimization in Urban Areas. Remote Sens. 2022, 14, 3439. https://doi.org/10.3390/rs14143439
Liu N, Li X, Peng X, Hong W. SAR Tomography Based on Atomic Norm Minimization in Urban Areas. Remote Sensing. 2022; 14(14):3439. https://doi.org/10.3390/rs14143439
Chicago/Turabian StyleLiu, Ning, Xinwu Li, Xing Peng, and Wen Hong. 2022. "SAR Tomography Based on Atomic Norm Minimization in Urban Areas" Remote Sensing 14, no. 14: 3439. https://doi.org/10.3390/rs14143439