
Deep Learning Based Sea Ice Classification with Gaofen-3 Fully Polarimetric SAR Data

 , ,
, ,
Abstract
:1. Introduction
2. Dataset, Preprocessing and Training Data
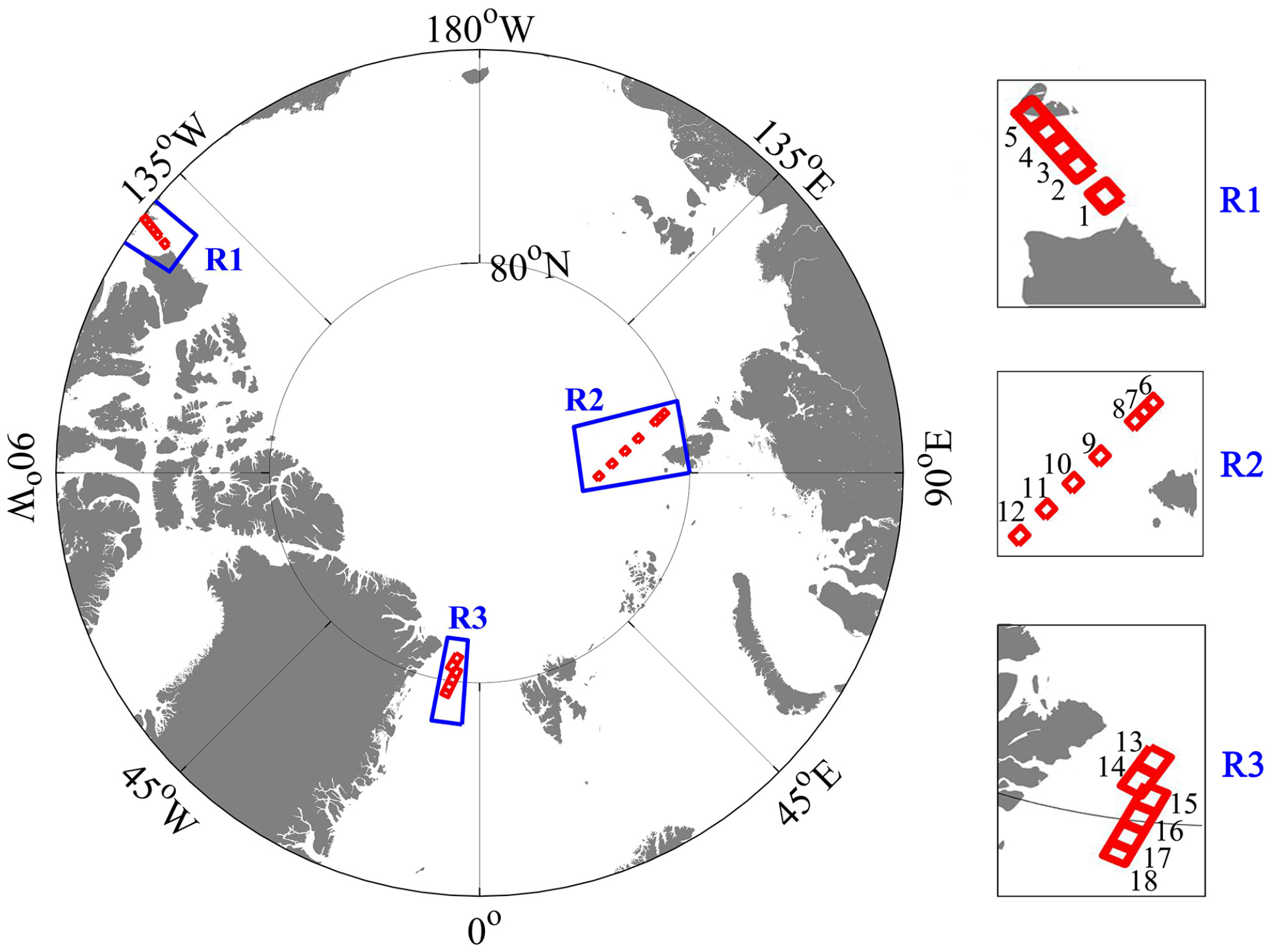
2.1. The GF-3 QPS Mode Dataset
2.2. SAR Data Preprocessing
2.3. Dataset for Model Training
3. Methodology
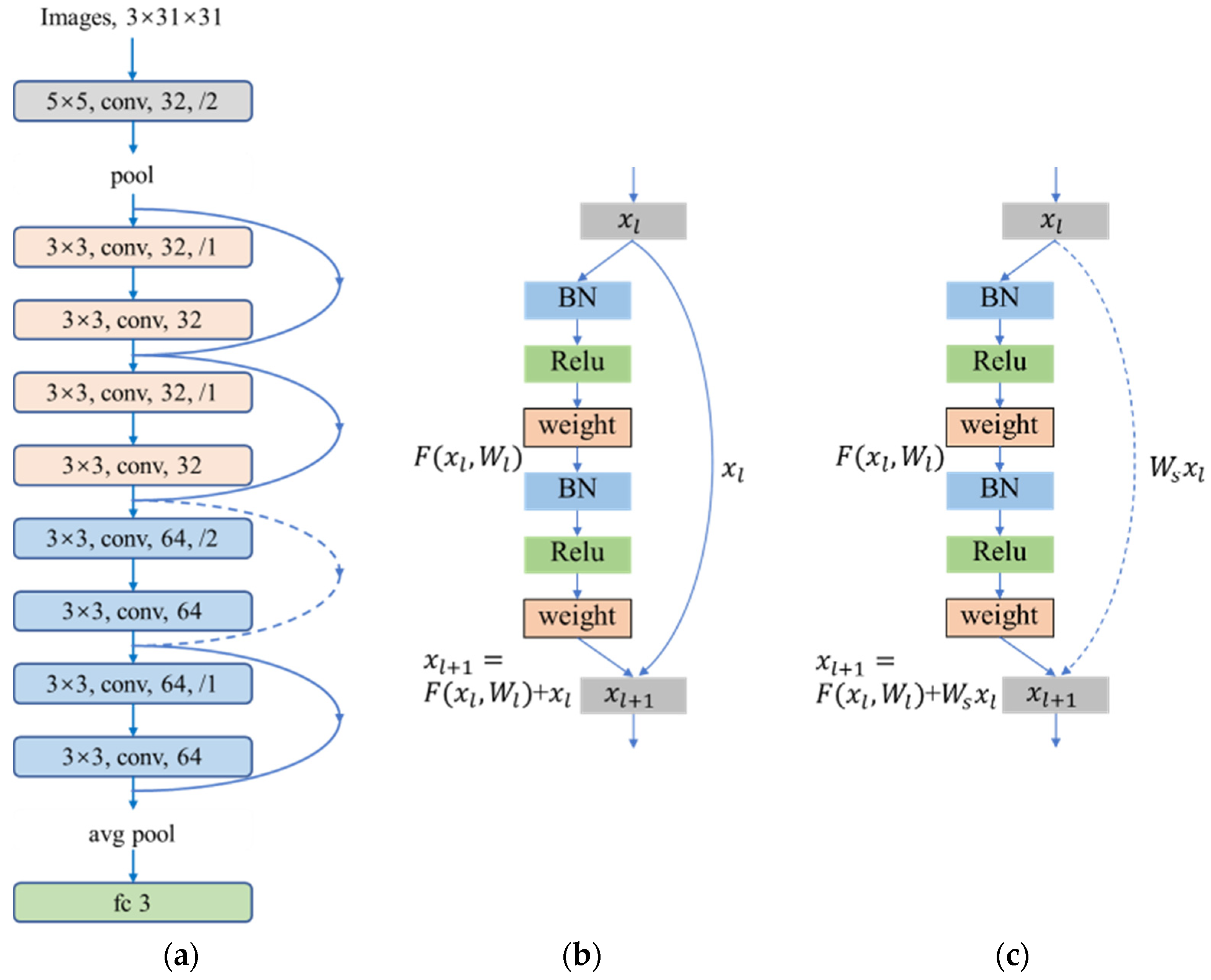
3.1. Structure of MSI-ResNet
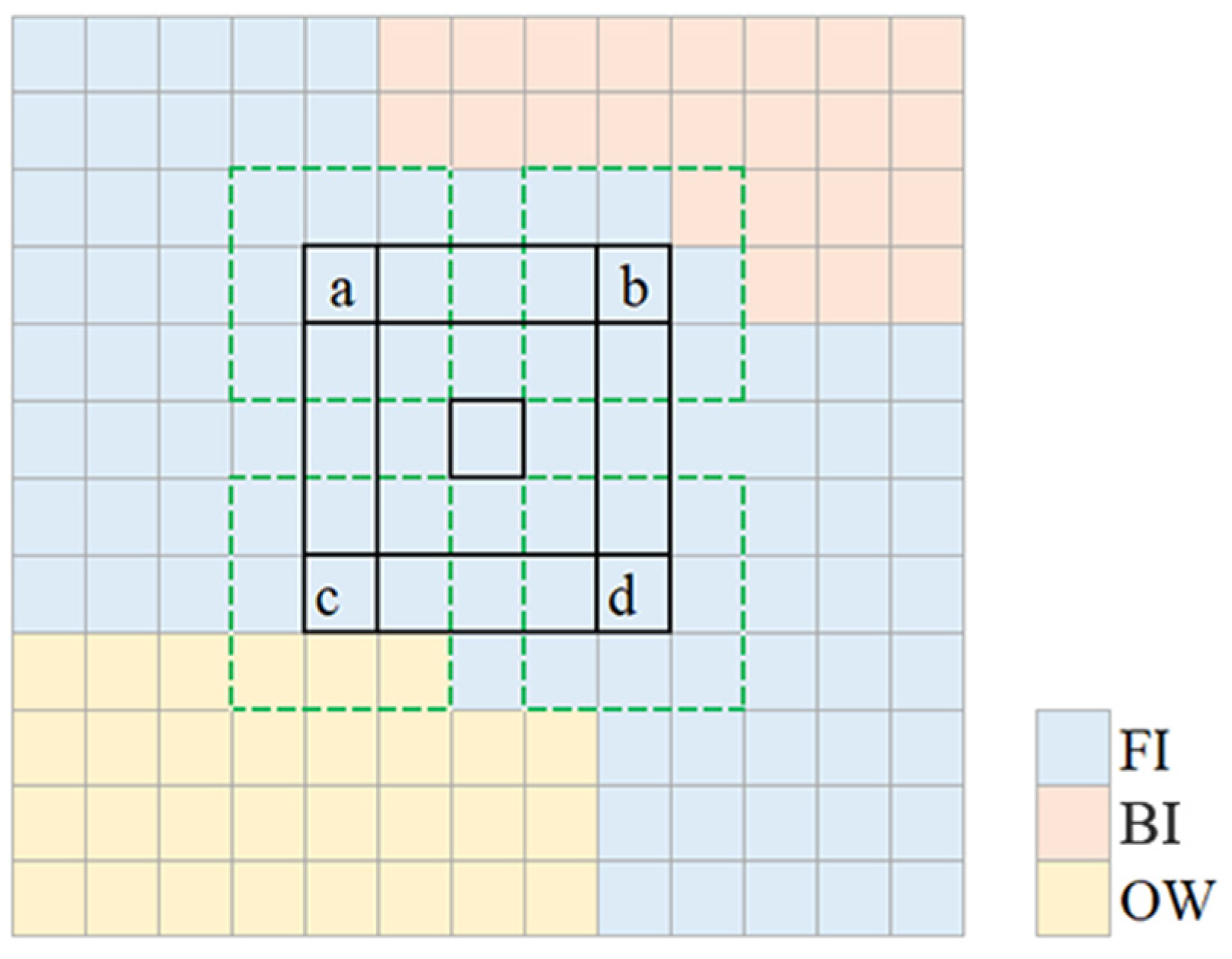
3.2. The Stratified Random Sampling Assessment Method
4. Results and Assessments
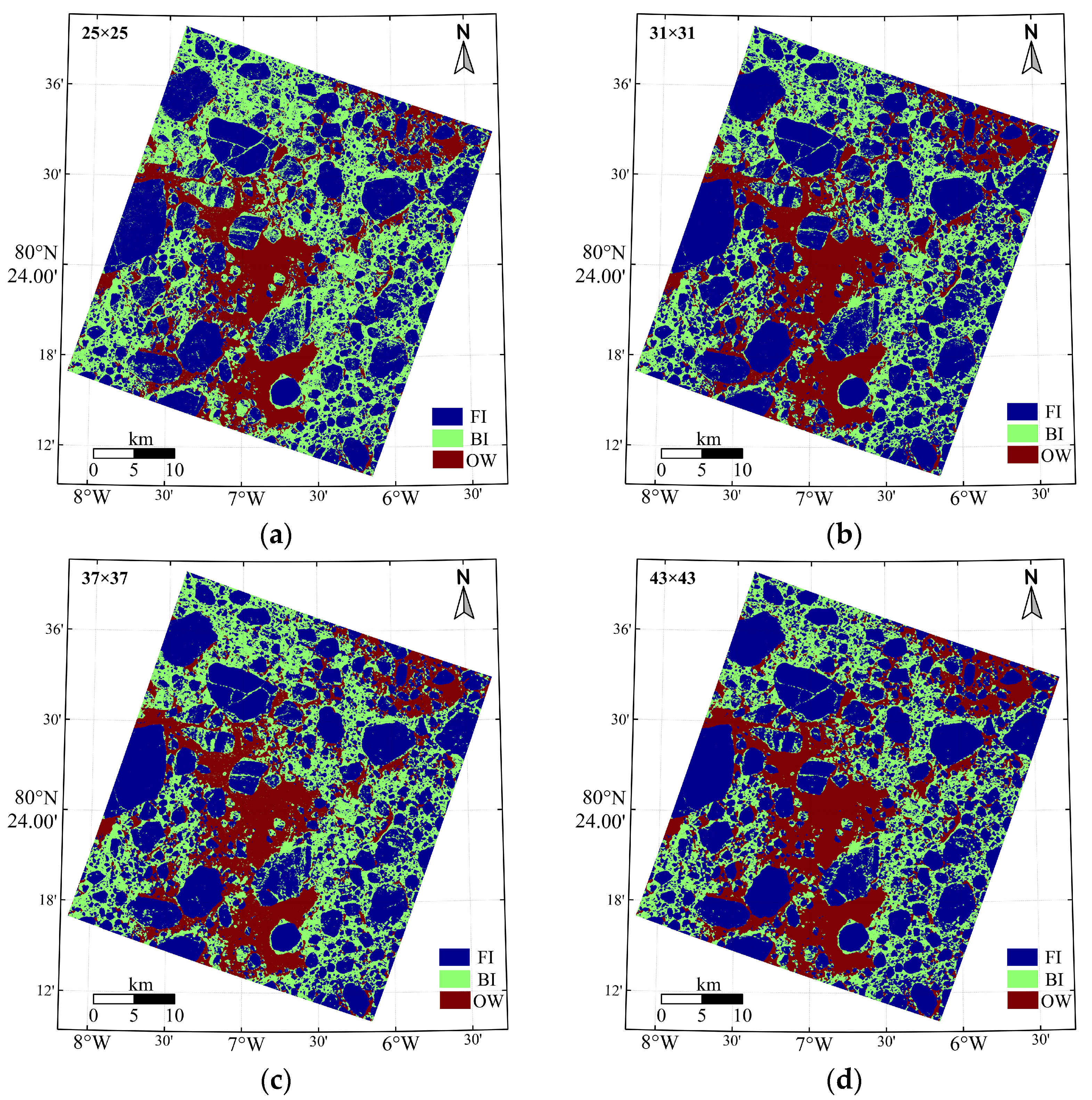
4.1. Experiments with the Patch Size
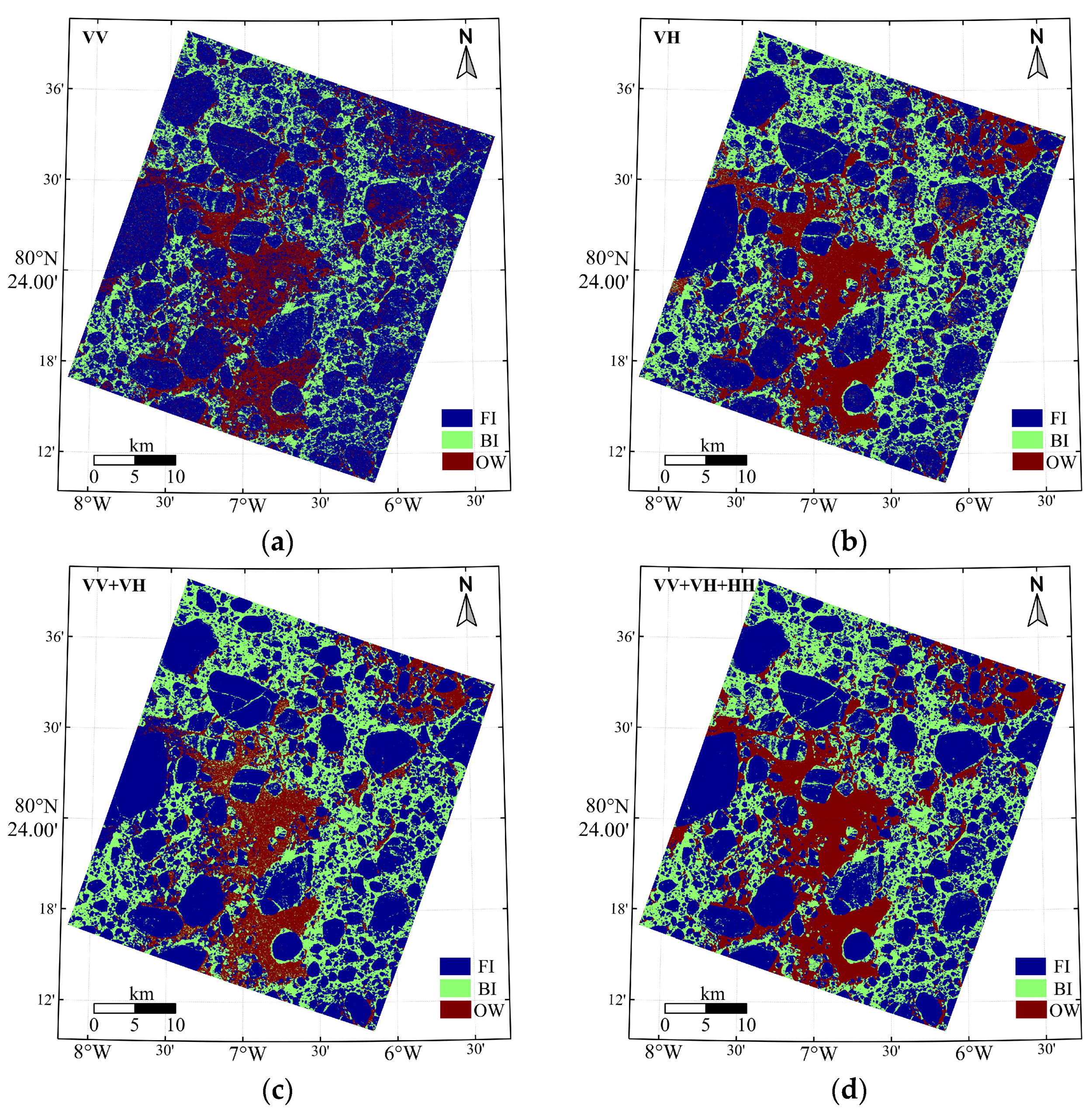
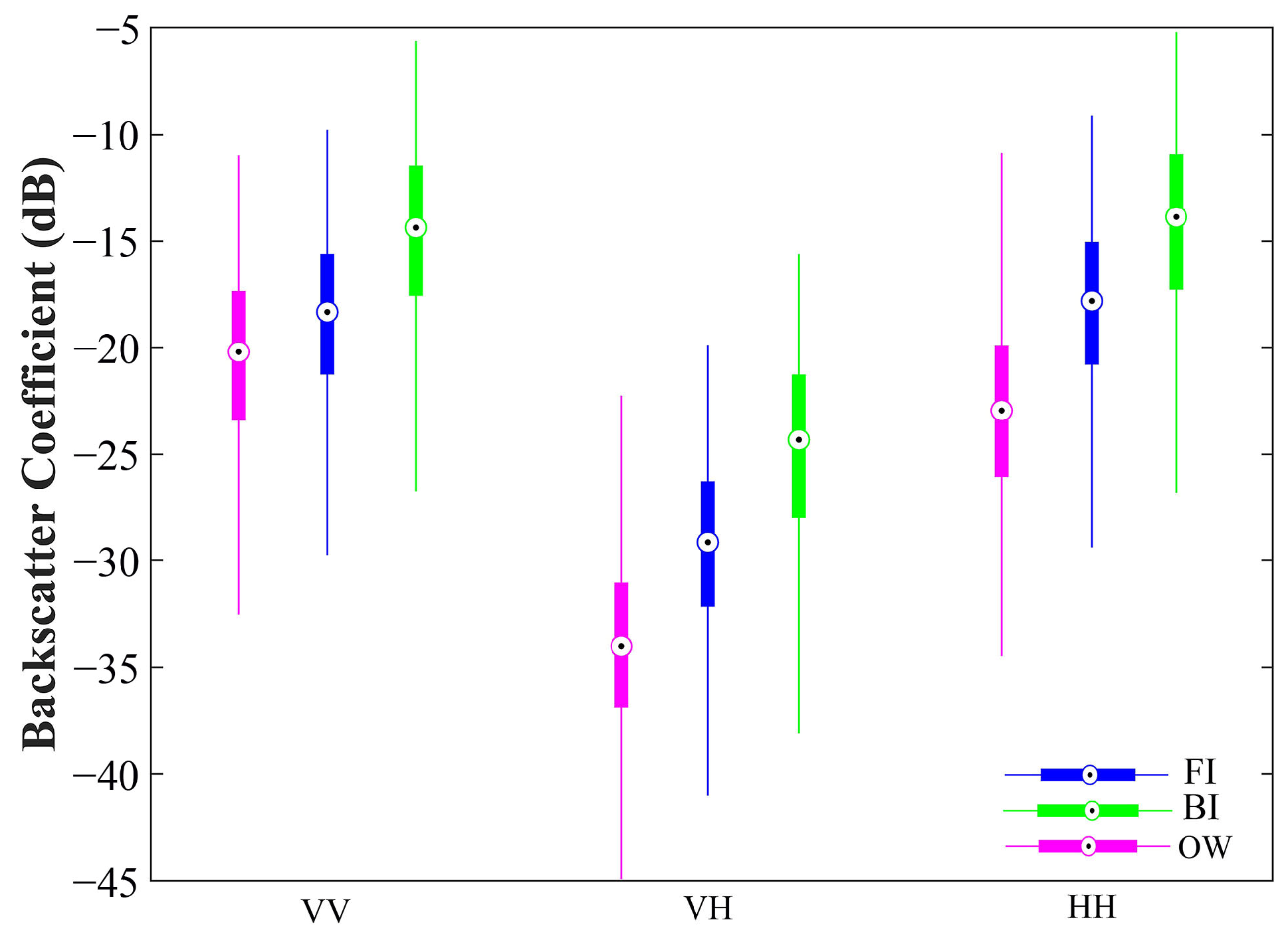
4.2. Experiments with Polarization Data Combination
4.3. Application and Comparison
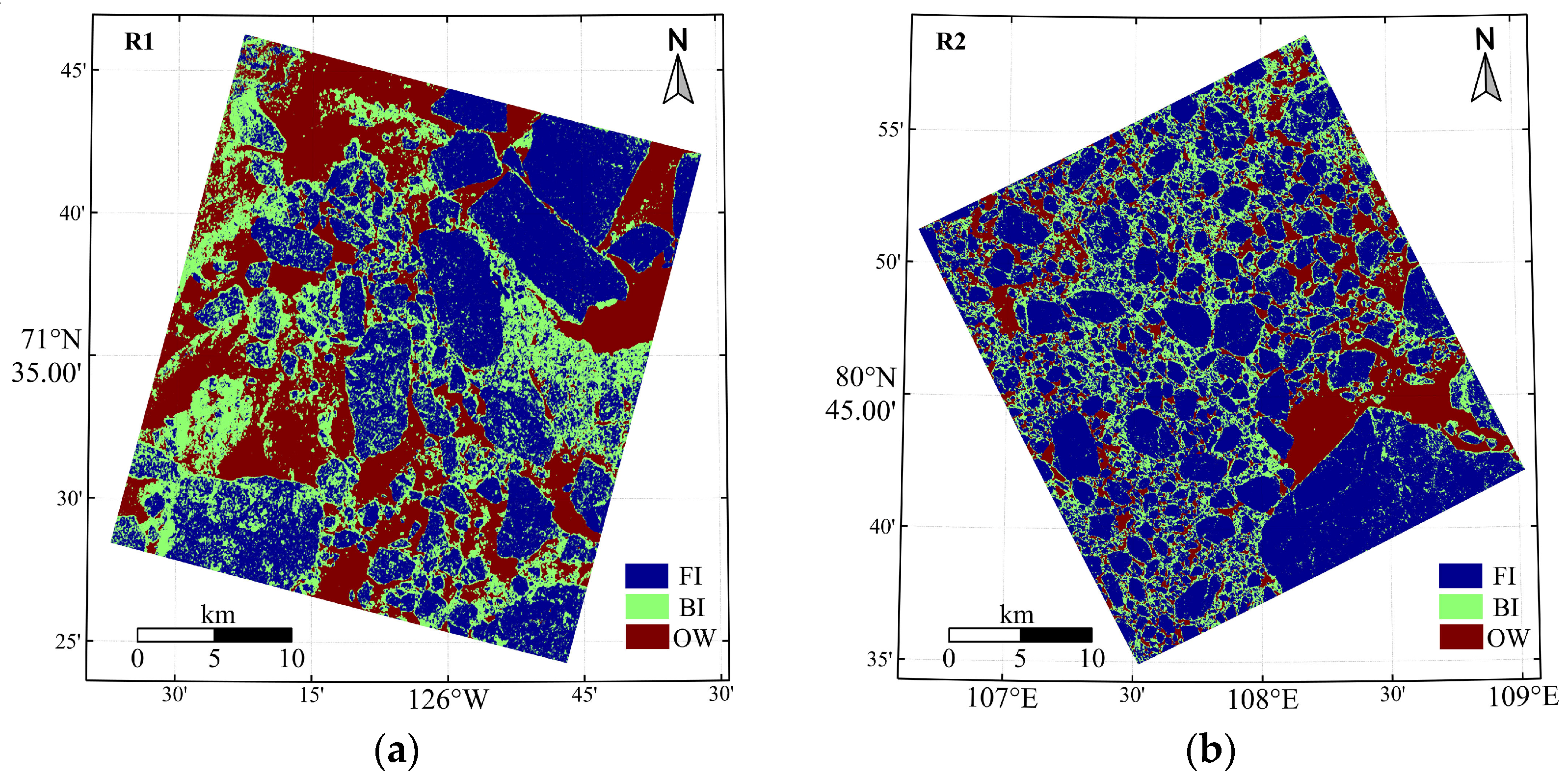
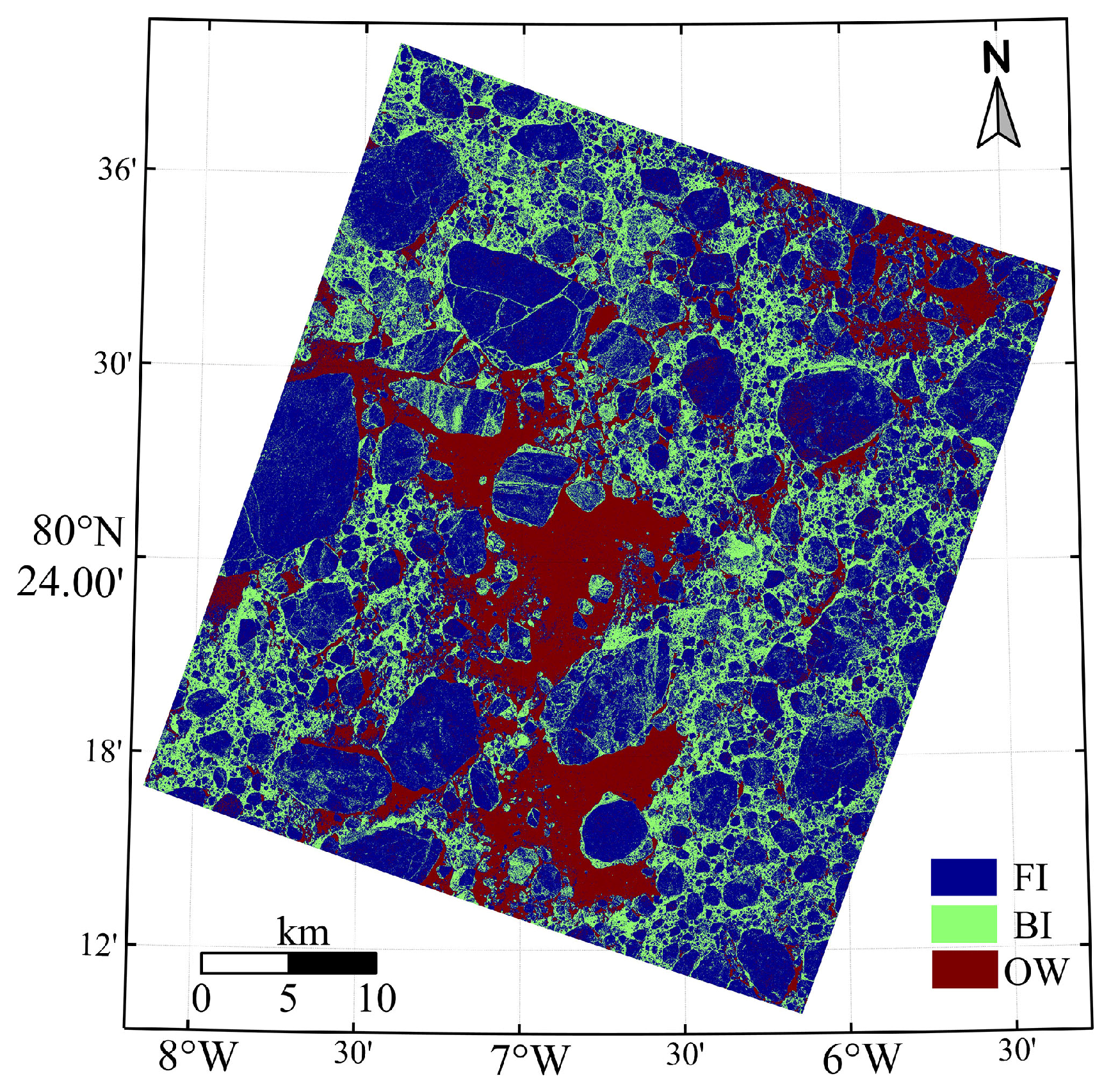
4.3.1. Classification of the R1-1 and R2-6 Scene Images
4.3.2. Comparison with the SVM Classifier
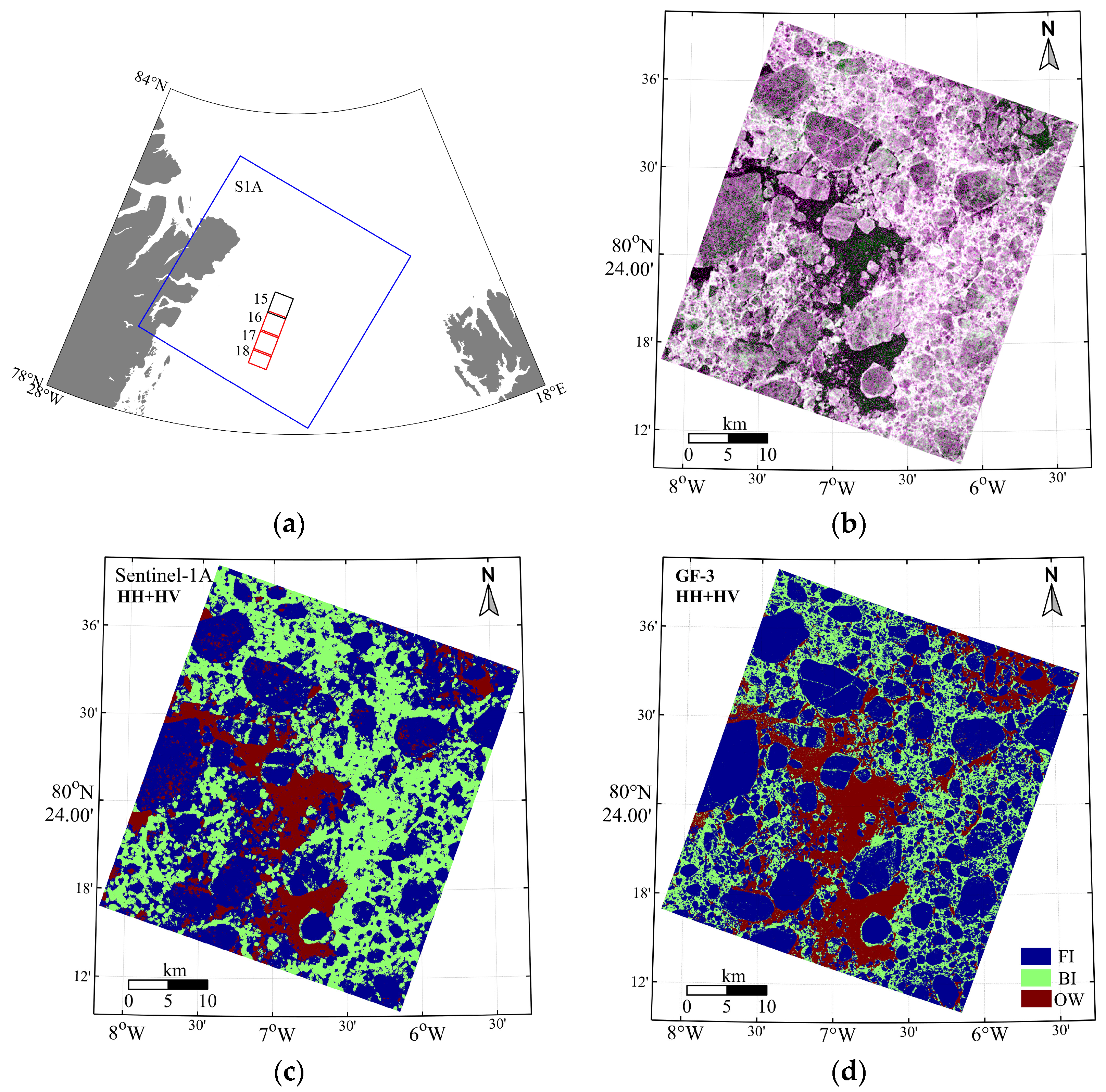
4.3.3. Comparison with Sentinel-1 SAR Classification
5. Discussion
6. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Barber, D.G.; Manore, M.J.; Agnew, T.A.; Welch, H.; Soulis, E.D.; le Drew, E.F. Science Issues Relating to Marine Aspects of the Cryosphere: Implications for Remote Sensing. Can. J. Remote. Sens. 1992, 18, 46–54. [Google Scholar] [CrossRef]
- Carsey, F. Review and status of remote sensing of sea ice. IEEE J. Ocean. Eng. 1989, 14, 127–138. [Google Scholar] [CrossRef]
- Kwok, R.; Rothrock, D.A. Decline in Arctic sea ice thickness from submarine and ICESat records: 1958–2008. Geophys. Res. Lett. 2009, 36, 36. [Google Scholar] [CrossRef] [Green Version]
- Maslanik, J.; Stroeve, J.; Fowler, C.; Emery, W. Distribution and trends in Arctic sea ice age through spring 2011. Geophys. Res. Lett. 2011, 38, 38. [Google Scholar] [CrossRef]
- Serreze, M.C.; Stroeve, J.C. Arctic sea ice trends, variability and implications for seasonal ice forecasting. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2015, 373, 20140159. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mallory, M.L.; Gilchrist, H.G.; Janssen, M.; Major, H.L.; Merkel, F.; Provencher, J.F.; Strøm, H. Financial costs of conducting science in the Arctic: Examples from seabird research. Arct. Sci. 2018, 4, 624–633. [Google Scholar] [CrossRef]
- Campbell, W.J.; Wayenberg, J.; Ramseyer, J.B.; Ramseier, R.O.; Vant, M.R.; Weaver, R.; Redmond, A.; Arsenaul, L.; Gloersen, P.; Zwally, H.J.; et al. Microwave remote sensing of sea ice in the AIDJEX Main Experiment. Bound. Layer Meteorol. 1978, 13, 309–337. [Google Scholar] [CrossRef]
- Fu, L.; Holt, B. SEASAT Views Oceans and Sea Ice with Synthetic Aperture Radar; JPL Publ: Pasadena, CA, USA, 1982; pp. 119–130. [Google Scholar]
- Nystuen, J.; Garcia, F. Sea ice classification using SAR backscatter statistics. IEEE Trans. Geosci. Remote. Sens. 1992, 30, 502–509. [Google Scholar] [CrossRef]
- Gill, J.P.; Yackel, J.J. Evaluation of C-band SAR polarimetric parameters for discrimination of first-year sea ice types. Can. J. Remote. Sens. 2012, 38, 306–323. [Google Scholar] [CrossRef]
- Moen, M.-A.; Anfinsen, S.; Doulgeris, A.; Renner, A.; Gerland, S.; Gerland, U.S. Assessing polarimetric SAR sea-ice classifications using consecutive day images. Ann. Glaciol. 2015, 56, 285–294. [Google Scholar] [CrossRef] [Green Version]
- Ressel, R.; Singha, S. Comparing Near Coincident Space Borne C and X Band Fully Polarimetric SAR Data for Arctic Sea Ice Classification. Remote. Sens. 2016, 8, 198. [Google Scholar] [CrossRef] [Green Version]
- Singha, S.; Johansson, M.; Hughes, N.; Hvidegaard, S.M.; Skourup, H. Arctic Sea Ice Characterization Using Spaceborne Fully Polarimetric L-, C-, and X-Band SAR with Validation by Airborne Measurements. IEEE Trans. Geosci. Remote. Sens. 2018, 56, 3715–3734. [Google Scholar] [CrossRef]
- Hara, Y.; Atkins, R.; Shin, R.; Kong, J.A.; Yueh, S.; Kwok, R. Application of neural networks for sea ice classification in polarimetric SAR images. IEEE Trans. Geosci. Remote. Sens. 1995, 33, 740–748. [Google Scholar] [CrossRef]
- Karvonen, J. Baltic Sea ice SAR segmentation and classification using modified pulse-coupled neural networks. IEEE Trans. Geosci. Remote. Sens. 2004, 42, 1566–1574. [Google Scholar] [CrossRef]
- Ressel, R.; Frost, A.; Lehner, S. A Neural Network-Based Classification for Sea Ice Types on X-Band SAR Images. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2015, 8, 3672–3680. [Google Scholar] [CrossRef] [Green Version]
- Song, W.; Li, M.; He, Q.; Huang, D.; Perra, C.; Liotta, A. A Residual Convolution Neural Network for Sea Ice Classification with Sentinel-1 SAR Imagery. In Proceedings of the 2018 IEEE International Conference on Data Mining Workshops (ICDMW), Singapore, 17–20 November 2018; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2018; pp. 795–802. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. arXiv 2015, arXiv:1512.03385. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Identity Mappings in Deep Residual Networks. arXiv 2016, arXiv:1603.05027. [Google Scholar]
- Zhang, Q. System Design and Key Technologies of the GF-3 Satellite. ACTA Geod. Cartogr. Sin. 2017, 46, 269–277. [Google Scholar] [CrossRef]
- Chang, Y.; Li, P.; Yang, J.; Zhao, J.; Zhao, L.; Shi, L. Polarimetric Calibration and Quality Assessment of the GF-3 Satellite Images. Sensors 2018, 18, 403. [Google Scholar] [CrossRef] [Green Version]
- Wang, T.; Zhang, G.; Yu, L.; Zhao, R.; Deng, M.; Xu, K. Multi-Mode GF-3 Satellite Image Geometric Accuracy Verification Using the RPC Model. Sensors 2017, 17, 2005. [Google Scholar] [CrossRef] [Green Version]
- Ren, L.; Yang, J.; Mouche, A.; Wang, H.; Wang, J.; Zheng, G.; Zhang, H. Preliminary Analysis of Chinese GF-3 SAR Quad-Polarization Measurements to Extract Winds in Each Polarization. Remote. Sens. 2017, 9, 1215. [Google Scholar] [CrossRef] [Green Version]
- Zhang, T.; Li, X.-M.; Feng, Q.; Ren, Y.; Shi, Y. Retrieval of Sea Surface Wind Speeds from Gaofen-3 Full Polarimetric Data. Remote. Sens. 2019, 11, 813. [Google Scholar] [CrossRef] [Green Version]
- Li, J.; Wang, C.; Wang, S.; Zhang, H.; Fu, Q.; Wang, Y. Gaofen-3 sea ice detection based on deep learning. In Proceedings of the 2017 Progress in Electromagnetics Research Symposium-Fall, Singapore, 19–22 November 2017; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2017; pp. 933–939. [Google Scholar]
- An, Q.; Pan, Z.; You, H. Ship Detection in Gaofen-3 SAR Images Based on Sea Clutter Distribution Analysis and Deep Convolutional Neural Network. Sensors 2018, 18, 334. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Wang, Y.; Wang, C.; Zhang, H.; Dong, Y.; Wei, S. Automatic Ship Detection Based on RetinaNet Using Multi-Resolution Gaofen-3 Imagery. Remote. Sens. 2019, 11, 531. [Google Scholar] [CrossRef] [Green Version]
- Li, X.-M.; Zhang, T.; Huang, B.; Jia, T. Capabilities of Chinese Gaofen-3 Synthetic Aperture Radar in Selected Topics for Coastal and Ocean Observations. Remote. Sens. 2018, 10, 1929. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.-C.; Lin, C.-J. LIBSVM. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]
- Livingstone, C.E.; Singh, K.P.; Gray, A.L. Seasonal and Regional Variations of Active/Passive Microwave Signatures of Sea Ice. IEEE Trans. Geosci. Remote. Sens. 1987, GE-25, 159–173. [Google Scholar] [CrossRef]
- Hersbach, H.; Bell, B.; Berrisford, P.; Biavati, G.; Horányi, A.; Muñoz Sabater, J.; Nicolas, J.; Peubey, C.; Radu, R.; Rozum, I.; et al. ERA5 Hourly Data on Single Levels from 1979 to Present. Copernicus Climate Change Service (C3S) Climate Data Store (CDS). 2018. Available online: https://cds.climate.copernicus.eu/cdsapp#!/dataset/reanalysis-era5-single-levels?tab=overview (accessed on 5 April 2021).
- JCOMM Expert Team on Sea Ice. Sea-Ice Nomenclature: Snapshot of the WMO Sea Ice Nomenclature WMO No. 259, Volume 1—Terminology and Codes; Volume II—Illustrated Glossary and III—International System of Sea-Ice Symbols); (WMO-No. 259 (I-III)); WMO-JCOMM: Geneva, Switzerland, 2014; p. 121. Available online: http://hdl.handle.net/11329/328 (accessed on 8 March 2021).
- Shokr, M.; Sinha, N. Sea Ice: Physics and Remote Sensing; American Geophysical Union, Monograph No. 209; John Wiley & Sons: Hoboken, NJ, USA, 2015; pp. 288–314. [Google Scholar]
- Wada, K. labelme: Image Polygonal Annotation with Python. 2016. Available online: https://github.com/wkentaro/labelme (accessed on 19 January 2021).
- Zhang, L.; Zhang, L.; Du, B. Deep Learning for Remote Sensing Data: A Technical Tutorial on the State of the Art. IEEE Geosci. Remote. Sens. Mag. 2016, 4, 22–40. [Google Scholar] [CrossRef]
- Cochran, W.G. Sampling Techniques, 3rd ed.; Wiley: New York, NY, USA, 1977; pp. 130–160. [Google Scholar]
- Stehman, S.V. Sampling designs for accuracy assessment of land cover. Int. J. Remote. Sens. 2009, 30, 5243–5272. [Google Scholar] [CrossRef]
- Hui, F.; Zhao, T.; Li, X.; Shokr, M.; Heil, P.; Zhao, J.; Zhang, L.; Cheng, X. Satellite-Based Sea Ice Navigation for Prydz Bay, East Antarctica. Remote. Sens. 2017, 9, 518. [Google Scholar] [CrossRef] [Green Version]
- Chen, S.; Shokr, M.; Li, X.; Ye, Y.; Zhang, Z.; Hui, F.; Cheng, X. MYI Floes Identification Based on the Texture and Shape Feature from Dual-Polarized Sentinel-1 Imagery. Remote. Sens. 2020, 12, 3221. [Google Scholar] [CrossRef]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote. Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Foody, G.M. Status of land cover classification accuracy assessment. Remote. Sens. Environ. 2002, 80, 185–201. [Google Scholar] [CrossRef]
- Soh, L.-K.; Tsatsoulis, C. Texture analysis of SAR sea ice imagery using gray level co-occurrence matrices. IEEE Trans. Geosci. Remote. Sens. 1999, 37, 780–795. [Google Scholar] [CrossRef] [Green Version]
- Sun, Y.; Li, X.-M. Denoising Sentinel-1 Extra-Wide Mode Cross-Polarization Images Over Sea Ice. IEEE Trans. Geosci. Remote. Sens. 2021, 59, 2116–2131. [Google Scholar] [CrossRef]
- European Space Agency. ASAR Product Handbook; Issue 2.2; ESRIN: Frascati, Italy, 2007. [Google Scholar]
- Mouche, A.; Chapron, B. Global C—B and E nvisat, RADARSAT -2 and S entinel-1 SAR measurements in copolarization and cross-polarization. J. Geophys. Res. Oceans 2015, 120, 7195–7207. [Google Scholar] [CrossRef] [Green Version]
- Komarov, A.S.; Zabeline, V.; Barber, D.G. Ocean Surface Wind Speed Retrieval From C-Band SAR Images Without Wind Direction Input. IEEE Trans. Geosci. Remote. Sens. 2013, 52, 980–990. [Google Scholar] [CrossRef]
- European Spatial Agency. Sentinel-1 User Handbook, GMES-S1OP-EOPG-TN-13-0001; ESRIN: Frascati, Italy, 2014. [Google Scholar]
- Shokr, M.; Dabboor, M. Observations of SAR polarimetric parameters of lake and fast sea ice during the early growth phase. Remote. Sens. Environ. 2020, 247, 111910. [Google Scholar] [CrossRef]
- Scheuchl, R.C.B.; Scheuchl, B.; Caves, R.; Flett, D.; de Abreu, R.; Arkett, M.; Cumming, I. ENVISAT SAR AP data for operational sea ice monitoring. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium, Anchorage, AK, USA, 20–24 September 2004. [Google Scholar]
- De Abreu, R.; Flett, D.; Scheuchl, B.; Ramsay, B. Operational sea ice monitoring with RADARSAT-2-a glimpse into the future. In Proceedings of the IGARSS 2003 IEEE International Geoscience and Remote Sensing Symposium, Toulouse, France, 21–25 July 2003. [Google Scholar]
- Hwang, P.A.; Stoffelen, A.; van Zadelhoff, G.-J.; Perrie, W.; Zhang, B.; Li, H.; Shen, H. Cross-polarization geophysical model function for C-band radar backscattering from the ocean surface and wind speed retrieval. J. Geophys. Res. Oceans 2015, 120, 893–909. [Google Scholar] [CrossRef]
- Dierking, W. Mapping of Different Sea Ice Regimes Using Images from Sentinel-1 and ALOS Synthetic Aperture Radar. IEEE Trans. Geosci. Remote. Sens. 2009, 48, 1045–1058. [Google Scholar] [CrossRef]
- Dierking, W. Sea Ice Monitoring by Synthetic Aperture Radar. Oceanography 2013, 26, 100–111. [Google Scholar] [CrossRef]
- Park, J.-W.; Korosov, A.A.; Babiker, M.; Won, J.-S.; Hansen, M.W.; Kim, H.-C. Classification of sea ice types in Sentinel-1 synthetic aperture radar images. Cryosphere 2020, 14, 2629–2645. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhu, T.; Spreen, G.; Melsheimer, C.; Huntemann, M.; Hughes, N.; Zhang, S.; Li, F. Sea ice and water classification on dual-polarized Sentinel-1 imagery during melting season. Cryosphere Discuss. 2021, 1–26. [Google Scholar] [CrossRef]
- Singha, S.; Johansson, A.M.; Doulgeris, A.P. Robustness of SAR Sea Ice Type Classification Across Incidence Angles and Seasons at L-Band. IEEE Trans. Geosci. Remote. Sens. 2020, 1–12. [Google Scholar] [CrossRef]
- Rignot, E.; Drinkwater, M.R. On the Application of Multifrequency Polarimetric Radar Observations to Sea-ice Classification. In Proceedings of the IGARSS ’92 International Geoscience and Remote Sensing Symposium, Houston, TX, USA, 26–29 May 1992; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2005; Volume 1, pp. 576–578. [Google Scholar]
- Aldenhoff, W.; Heuzé, C.; Eriksson, L.E. Comparison of ice/water classification in Fram Strait from C- and L-band SAR imagery. Ann. Glaciol. 2018, 59, 112–123. [Google Scholar] [CrossRef] [Green Version]
- Tan, W.; Li, J.; Xu, L.; Chapman, M.A. Semiautomated Segmentation of Sentinel-1 SAR Imagery for Mapping Sea Ice in Labrador Coast. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2018, 11, 1419–1432. [Google Scholar] [CrossRef]
- Wang, Y.R.; Li, X.M. Arctic sea ice cover data from spaceborne SAR by deep learning. Earth Syst. Sci. Data Discuss. 2020, 1–30. [Google Scholar] [CrossRef]
- Scheuchl, B.; Caves, R.; Cumming, I.; Staples, G. Automated sea ice classification using spaceborne polarimetric SAR data. In Proceedings of the IGARSS 2001. Scanning the Present and Resolving the Future. Proceedings, IEEE 2001 International Geoscience and Remote Sensing Symposium (Cat. No.01CH37217), Sydney, Australia, 9–13 July 2001; Institute of Electrical and Electronics Engineers (IEEE): Piscataway, NJ, USA, 2002. [Google Scholar]
- Zakhvatkina, N.Y.; Alexandrov, V.Y.; Johannessen, O.M.; Sandven, S.; Frolov, I.Y. Classification of Sea Ice Types in ENVISAT Synthetic Aperture Radar Images. IEEE Trans. Geosci. Remote. Sens. 2012, 51, 2587–2600. [Google Scholar] [CrossRef]
- Liu, H.; Guo, H.; Zhang, L. SVM-Based Sea Ice Classification Using Textural Features and Concentration From RADARSAT-2 Dual-Pol ScanSAR Data. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2014, 8, 1601–1613. [Google Scholar] [CrossRef]
- Ressel, R.; Singha, S.; Lehner, S.; Rosel, A.; Spreen, G. Investigation into Different Polarimetric Features for Sea Ice Classification Using X-Band Synthetic Aperture Radar. IEEE J. Sel. Top. Appl. Earth Obs. Remote. Sens. 2016, 9, 3131–3143. [Google Scholar] [CrossRef] [Green Version]
- Zhang, W.; Witharana, C.; Liljedahl, A.K.; Kanevskiy, M. Deep Convolutional Neural Networks for Automated Characterization of Arctic Ice-Wedge Polygons in Very High Spatial Resolution Aerial Imagery. Remote. Sens. 2018, 10, 1487. [Google Scholar] [CrossRef] [Green Version]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Region | ID | Date | Acq. Time (UTC) | Swath (km) | Near inc. Angle (deg.) | Far inc. Angle (deg.) |
|---|---|---|---|---|---|---|
| R1 | 1 | 25 May 2017 | 15:11:01 | 18.28 | 35.35 | 37.18 |
| 2 | 25 May 2017 | 15:11:11 | 18.28 | 35.35 | 37.18 | |
| 3 | 25 May 2017 | 15:11:15 | 18.28 | 35.35 | 37.18 | |
| 4 | 25 May 2017 | 15:11:20 | 18.28 | 35.35 | 37.18 | |
| 5 | 25 May 2017 | 15:11:25 | 18.27 | 35.35 | 37.18 | |
| R2 | 6 | 2 August 2017 | 09:09:01 | 18.10 | 35.39 | 37.20 |
| 7 | 2 August 2017 | 09:09:06 | 18.13 | 35.39 | 37.20 | |
| 8 | 2 August 2017 | 09:09:11 | 18.15 | 35.39 | 37.20 | |
| 9 | 2 August 2017 | 09:09:30 | 18.24 | 35.38 | 37.20 | |
| 10 | 2 August 2017 | 09:09:44 | 18.30 | 35.37 | 37.20 | |
| 11 | 2 August 2017 | 09:09:59 | 18.34 | 35.37 | 37.20 | |
| 12 | 2 August 2017 | 09:10:14 | 18.32 | 35.36 | 37.19 | |
| R3 | 13 | 14 June 2017 | 08:01:09 | 24.88 | 37.96 | 40.16 |
| 14 | 14 June 2017 | 08:01:15 | 24.84 | 37.97 | 40.16 | |
| 15 | 17 June 2017 | 07:37:19 | 27.27 | 41.73 | 43.79 | |
| 16 | 17 June 2017 | 07:37:25 | 27.24 | 41.74 | 43.79 | |
| 17 | 17 June 2017 | 07:37:31 | 27.20 | 41.74 | 43.79 | |
| 18 | 17 June 2017 | 07:37:37 | 27.20 | 41.74 | 43.79 |
| Patch Size | Ice Type | FI | BI | OW | User’s Accuracy (%) | Producer’s Accuracy (%) | Overall Accuracy (%) | Kappa | Fraction (%) |
|---|---|---|---|---|---|---|---|---|---|
| 25 × 25 | FI | 565 | 19 | 6 | 95.76 | 90.98 | 90.53 | 0.85 | 46.18 |
| BI | 53 | 379 | 16 | 84.60 | 89.81 | 35.02 | |||
| OW | 3 | 24 | 213 | 88.75 | 90.64 | 18.80 | |||
| 31 × 31 | FI | 687 | 21 | 9 | 95.12 | 96.33 | 94.67 | 0.91 | 53.04 |
| BI | 21 | 341 | 3 | 93.42 | 90.21 | 27.04 | |||
| OW | 3 | 10 | 256 | 95.17 | 96.60 | 19.92 | |||
| 37 × 37 | FI | 473 | 25 | 1 | 94.79 | 91.67 | 90.10 | 0.85 | 48.98 |
| BI | 39 | 267 | 7 | 85.30 | 80.42 | 29.80 | |||
| OW | 4 | 40 | 316 | 87.78 | 97.53 | 21.22 | |||
| 43 × 43 | FI | 639 | 26 | 2 | 95.80 | 93.70 | 89.53 | 0.83 | 51.02 |
| BI | 36 | 296 | 5 | 87.83 | 77.28 | 25.74 | |||
| OW | 7 | 61 | 231 | 77.63 | 97.12 | 23.24 |
| Patch Size | Ice Type | FI | BI | OW | User’s Accuracy (%) | Producer’s Accuracy (%) | Overall Accuracy (%) | Kappa | Fraction (%) |
|---|---|---|---|---|---|---|---|---|---|
| VV | FI | 786 | 129 | 54 | 81.11 | 93.46 | 83.37 | 0.70 | 54.27 |
| BI | 10 | 282 | 6 | 94.63 | 67.46 | 26.36 | |||
| OW | 45 | 7 | 190 | 78.51 | 76.00 | 19.38 | |||
| VH | FI | 689 | 30 | 24 | 92.73 | 92.98 | 91.09 | 0.85 | 64.20 |
| BI | 31 | 323 | 7 | 89.47 | 89.23 | 19.75 | |||
| OW | 21 | 9 | 235 | 88.68 | 88.35 | 16.05 | |||
| VV + VH | FI | 833 | 57 | 36 | 89.96 | 97.54 | 91.12 | 0.85 | 62.40 |
| BI | 17 | 292 | 4 | 93.29 | 78.28 | 21.07 | |||
| OW | 4 | 24 | 332 | 92.22 | 89.25 | 16.53 | |||
| VV + VH + HH | FI | 687 | 21 | 9 | 95.12 | 96.33 | 94.67 | 0.91 | 53.04 |
| BI | 21 | 341 | 3 | 93.42 | 90.21 | 27.04 | |||
| OW | 3 | 10 | 256 | 95.17 | 96.60 | 19.92 |
| Data (Classifier) | Ice Type | FI | BI | OW | User’s Accuracy (%) | Producer’s Accuracy (%) | Overall Accuracy (%) | Kappa |
|---|---|---|---|---|---|---|---|---|
| R1-1 (MSI-ResNet) | FI | 480 | 9 | 10 | 96.19 | 97.76 | 94.62 | 0.92 |
| BI | 11 | 269 | 33 | 85.94 | 96.76 | |||
| OW | 0 | 0 | 360 | 100.00 | 89.33 | |||
| R2-6 (MSI-ResNet) | FI | 838 | 38 | 9 | 94.69 | 98.70 | 94.23 | 0.90 |
| BI | 11 | 283 | 22 | 89.56 | 87.08 | |||
| OW | 0 | 4 | 251 | 98.43 | 89.00 | |||
| R3-15 (LibSVM) | FI | 746 | 57 | 36 | 88.92 | 92.21 | 89.04 | 0.81 |
| BI | 38 | 308 | 1 | 88.76 | 84.38 | |||
| OW | 25 | 0 | 222 | 89.88 | 85.71 |
| Data (Method) | Ice Type | FI | BI | OW | User’s Accuracy (%) | Producer’s Accuracy (%) | Overall Accuracy (%) | Kappa |
|---|---|---|---|---|---|---|---|---|
| Sentinel-1A (HH + HV) | FI | 658 | 54 | 26 | 89.16 | 89.52 | 88.03 | 0.79 |
| BI | 64 | 411 | 1 | 86.34 | 87.26 | |||
| OW | 13 | 6 | 137 | 87.82 | 83.54 | |||
| GF-3 (HH + HV) | FI | 750 | 54 | 10 | 92.14 | 96.53 | 92.08 | 0.84 |
| BI | 25 | 312 | 4 | 91.50 | 81.46 | |||
| OW | 2 | 17 | 240 | 92.66 | 94.49 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, T.; Yang, Y.; Shokr, M.; Mi, C.; Li, X.-M.; Cheng, X.; Hui, F. Deep Learning Based Sea Ice Classification with Gaofen-3 Fully Polarimetric SAR Data. Remote Sens. 2021, 13, 1452. https://doi.org/10.3390/rs13081452
Zhang T, Yang Y, Shokr M, Mi C, Li X-M, Cheng X, Hui F. Deep Learning Based Sea Ice Classification with Gaofen-3 Fully Polarimetric SAR Data. Remote Sensing. 2021; 13(8):1452. https://doi.org/10.3390/rs13081452
Chicago/Turabian StyleZhang, Tianyu, Ying Yang, Mohammed Shokr, Chunlei Mi, Xiao-Ming Li, Xiao Cheng, and Fengming Hui. 2021. "Deep Learning Based Sea Ice Classification with Gaofen-3 Fully Polarimetric SAR Data" Remote Sensing 13, no. 8: 1452. https://doi.org/10.3390/rs13081452