Uncertainty and Overfitting in Fluvial Landform Classification Using Laser Scanned Data and Machine Learning: A Comparison of Pixel and Object-Based Approaches

 , , ,
, , , 
Abstract
:
1. Introduction
2. Materials and Methods
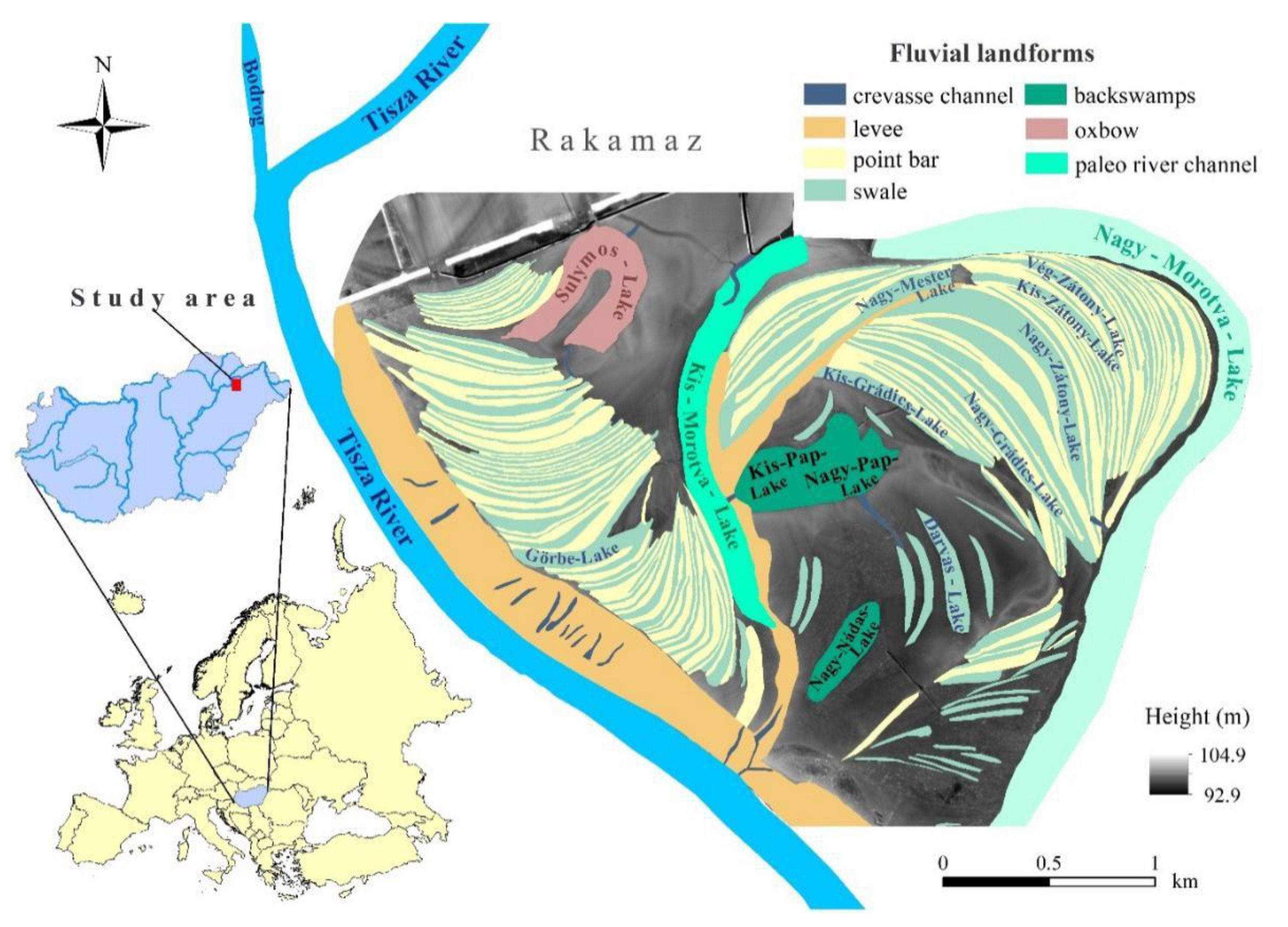
2.1. Study Site
2.2. Data Set and DTM Generation
2.3. Terrain Analysis
2.4. Preprocessing of Input Data for Model Building
2.5. Model Building
2.5.1. Variable Selection
2.5.2. Supervised Classification Procedure
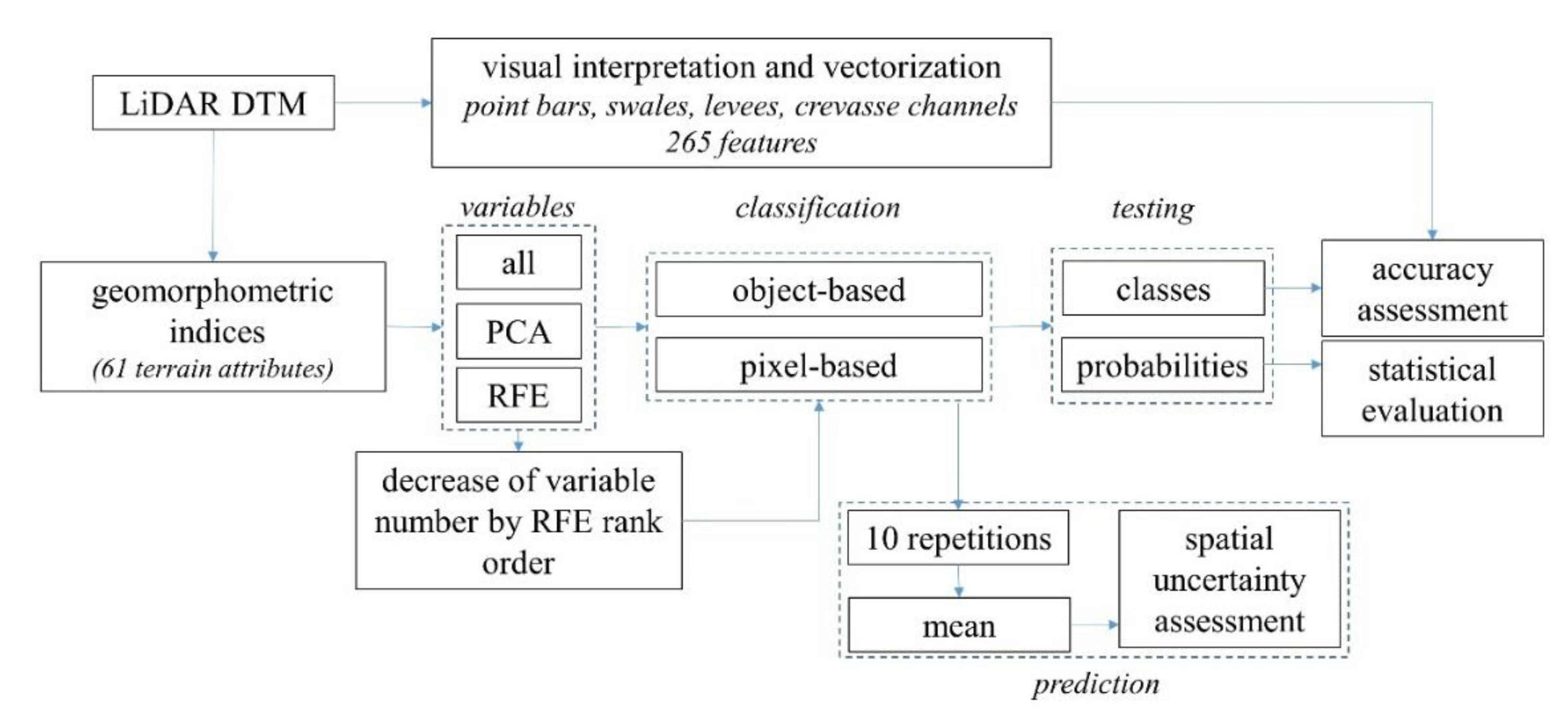
- We used the vector layer as reference data of the fluvial forms: stratified random sampling was carried out and we chose 5000 pixels for training and 5000 pixels for testing.
- Polygons of the reference vector layer were used as objects; thus, the object-oriented term did not mean automatic segmentation, but real fluvial objects interpreted in a visual way. We determined the mean values of the DTM and the 60 derived raster layers by geomorphological features.
2.6. Model Evaluation and Uncertainty Analysis
2.7. Predictor Stability Analysis
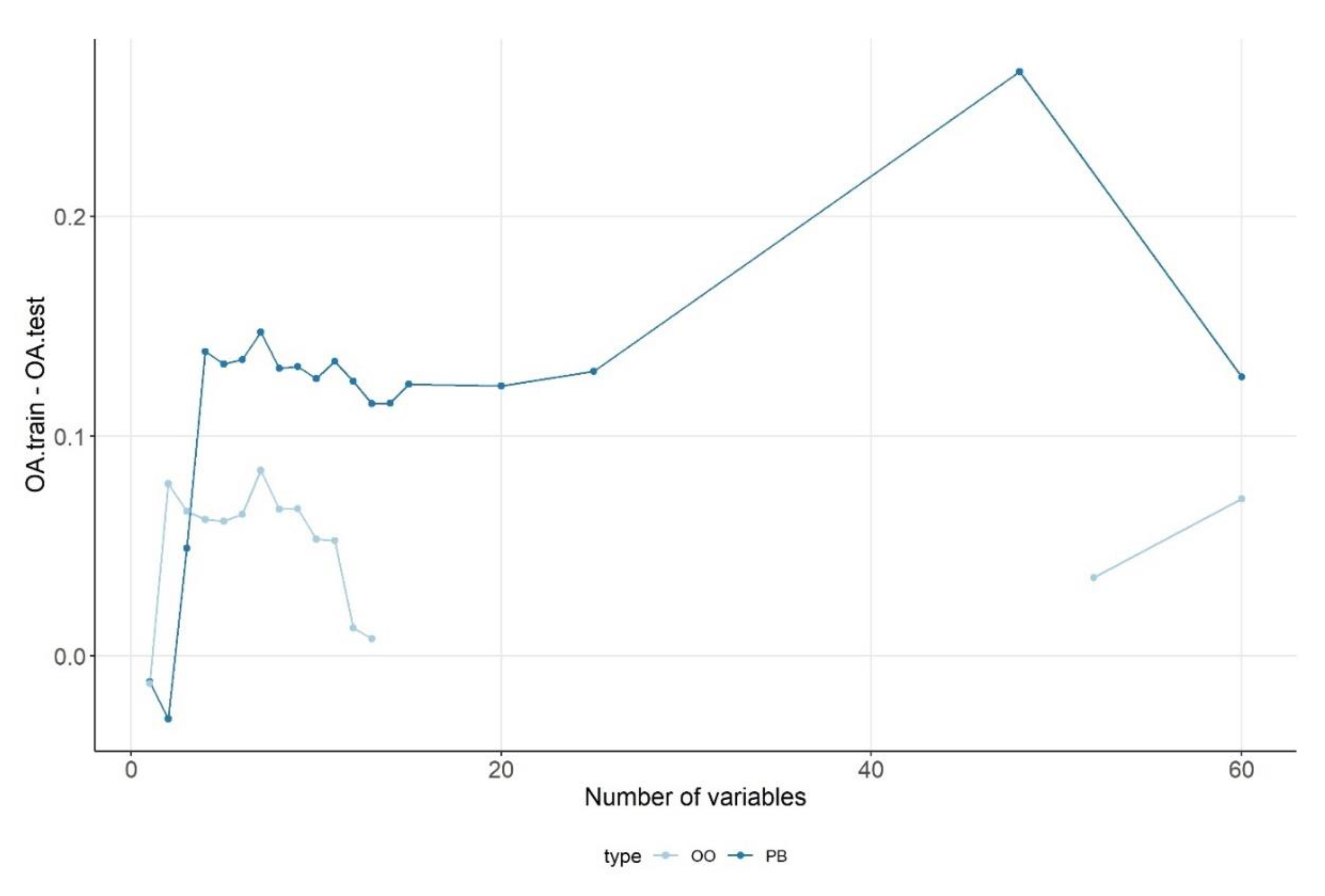
2.8. Analysis of Overfitting
2.9. Statistical Evaluation
3. Results
3.1. Results of Data Preprocessing
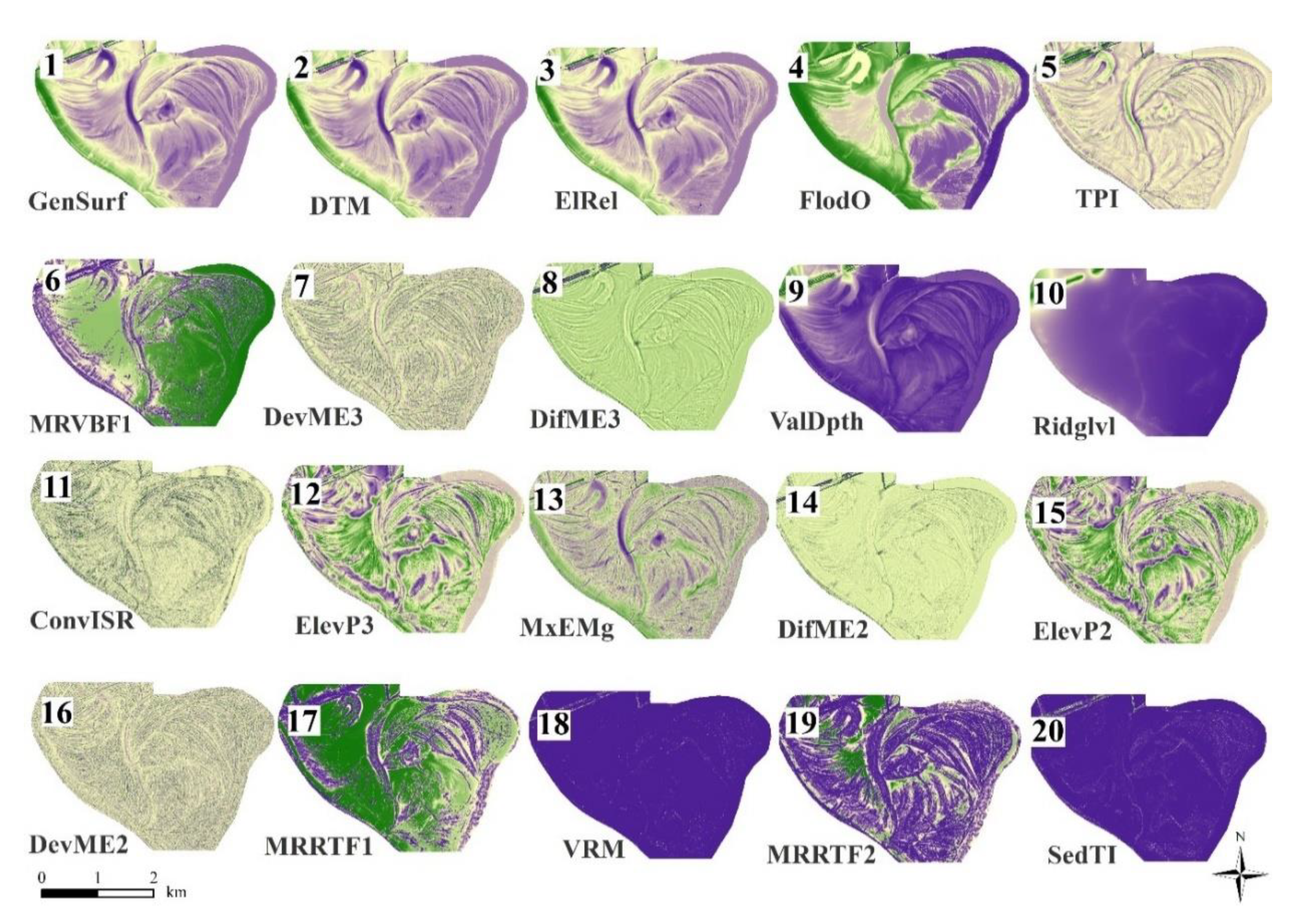
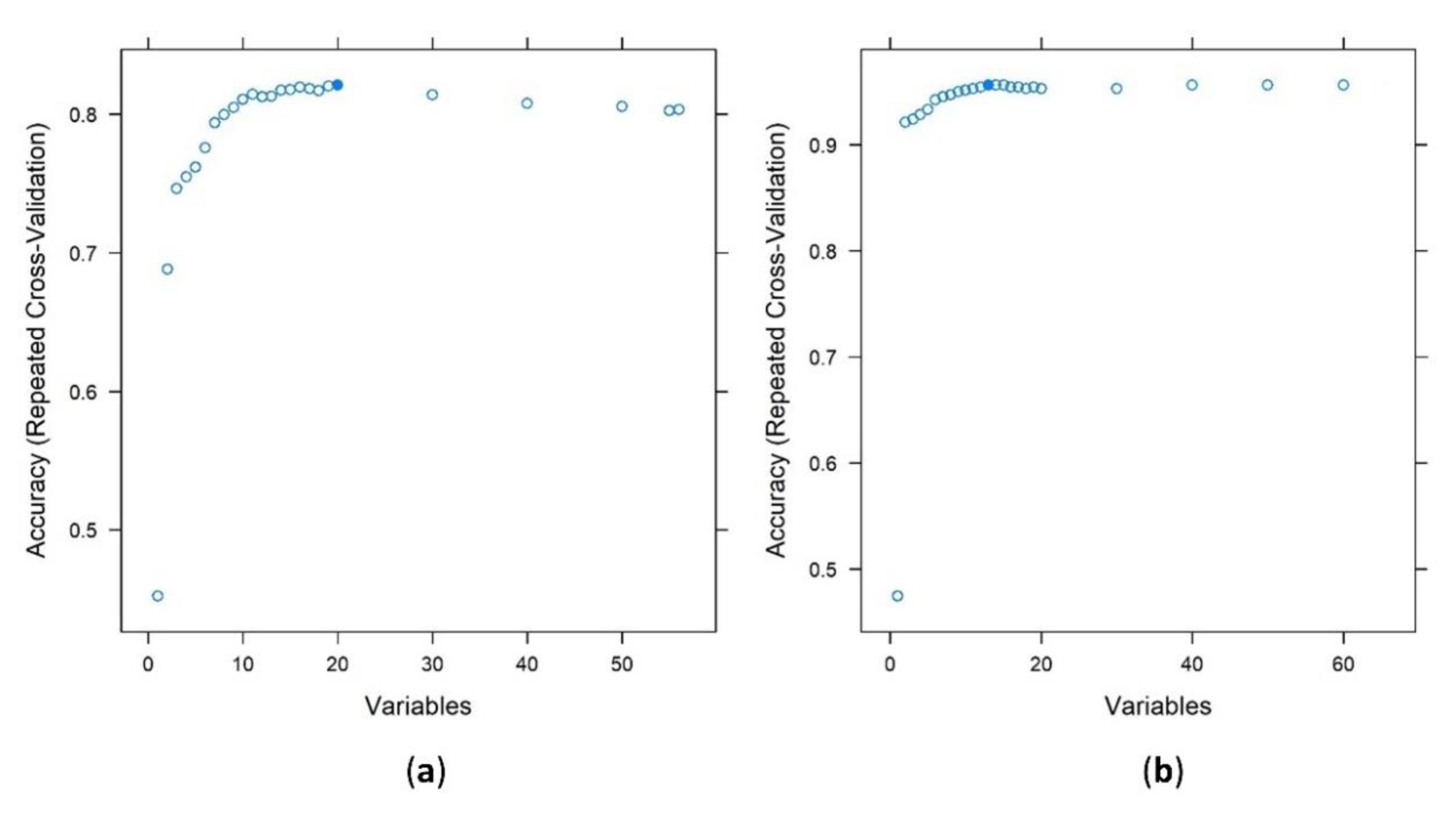
- PB-approach: maximum OA had been reached with 20 variables (Figure 4) GenSurf>DTM>ElRel>FlodO>TPI>MRVBF1>DevME3>DifME3>ValDpth>RidgLvl>ConvISR> ElevP3>MxEMg>DifME2>ElevP2>DevME2>MRRTF1>VRM>MRRTF2>SedTI.
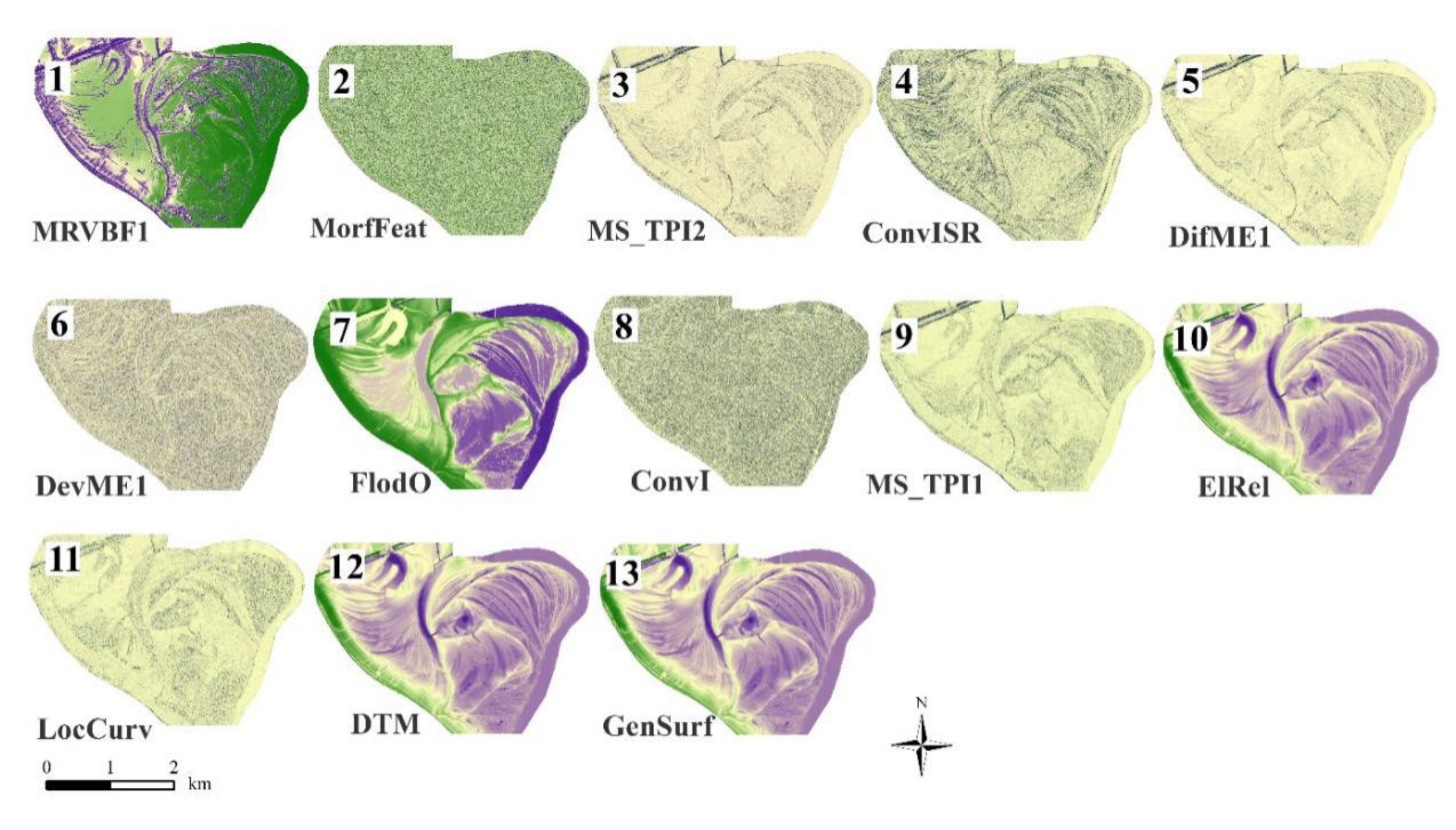
- OO-approach: maximum OA had been reached with 13 variables (Figure 5) MRVBF1>MorfFeat>MS_TPI2>ConvISR>DifME1>DevME1>FlodO>ConvI>MS_TPI1>ElRel> LocCurv>DTM >GenSurf.
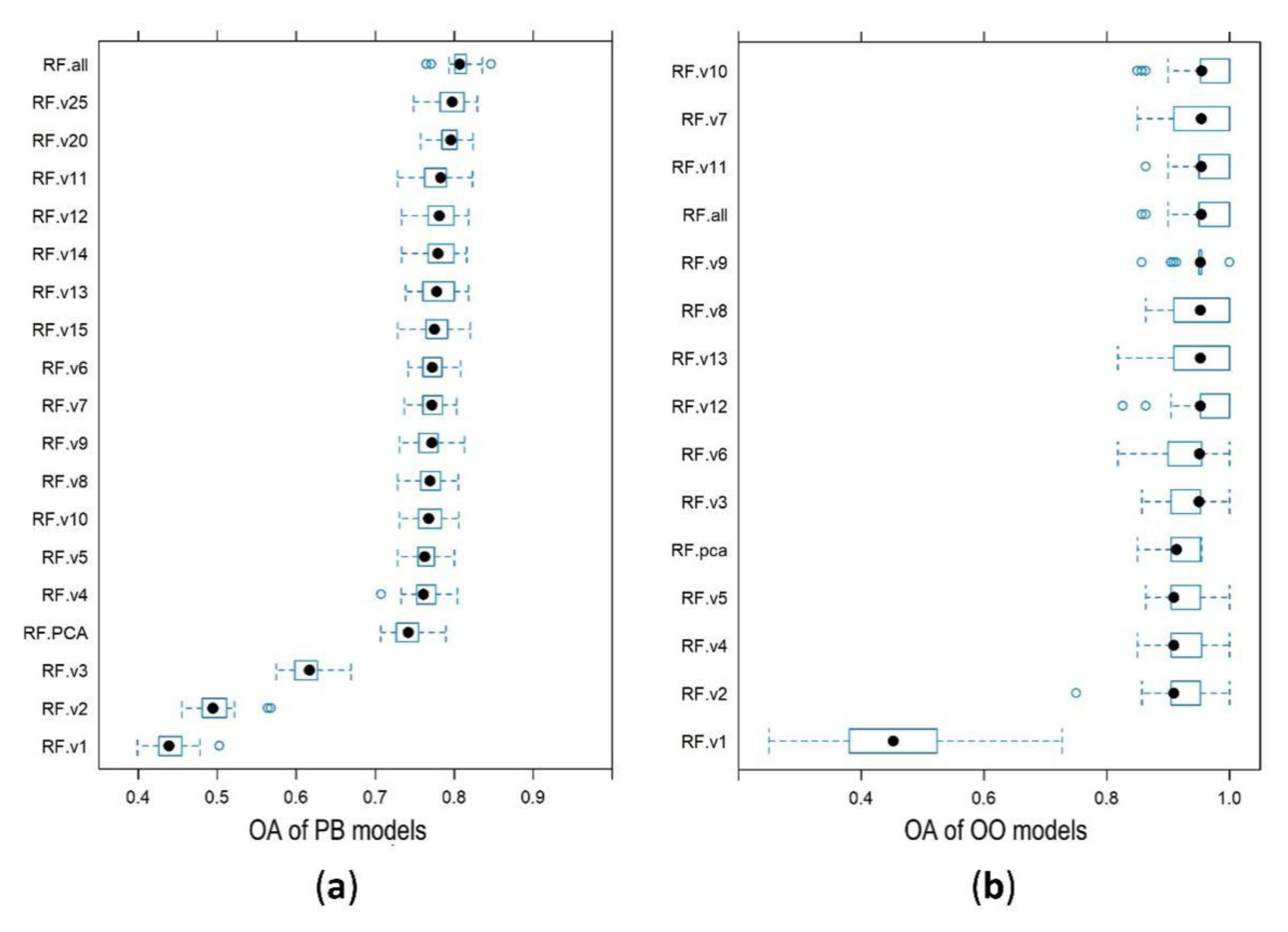
3.2. Overall Accuracies of RF Classifications
3.2.1. Pixel-Based Classification
3.2.2. Object-Oriented Classification
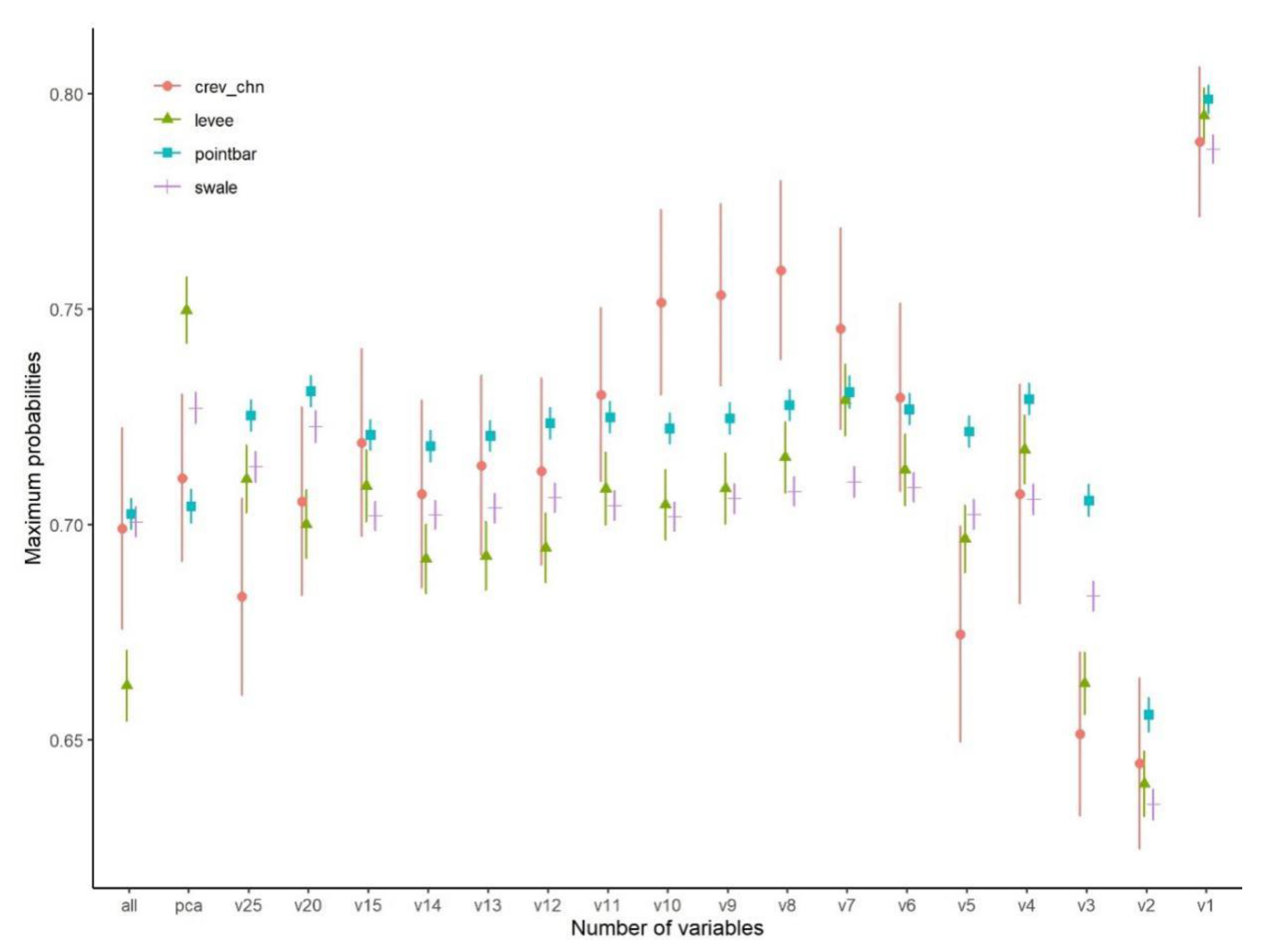
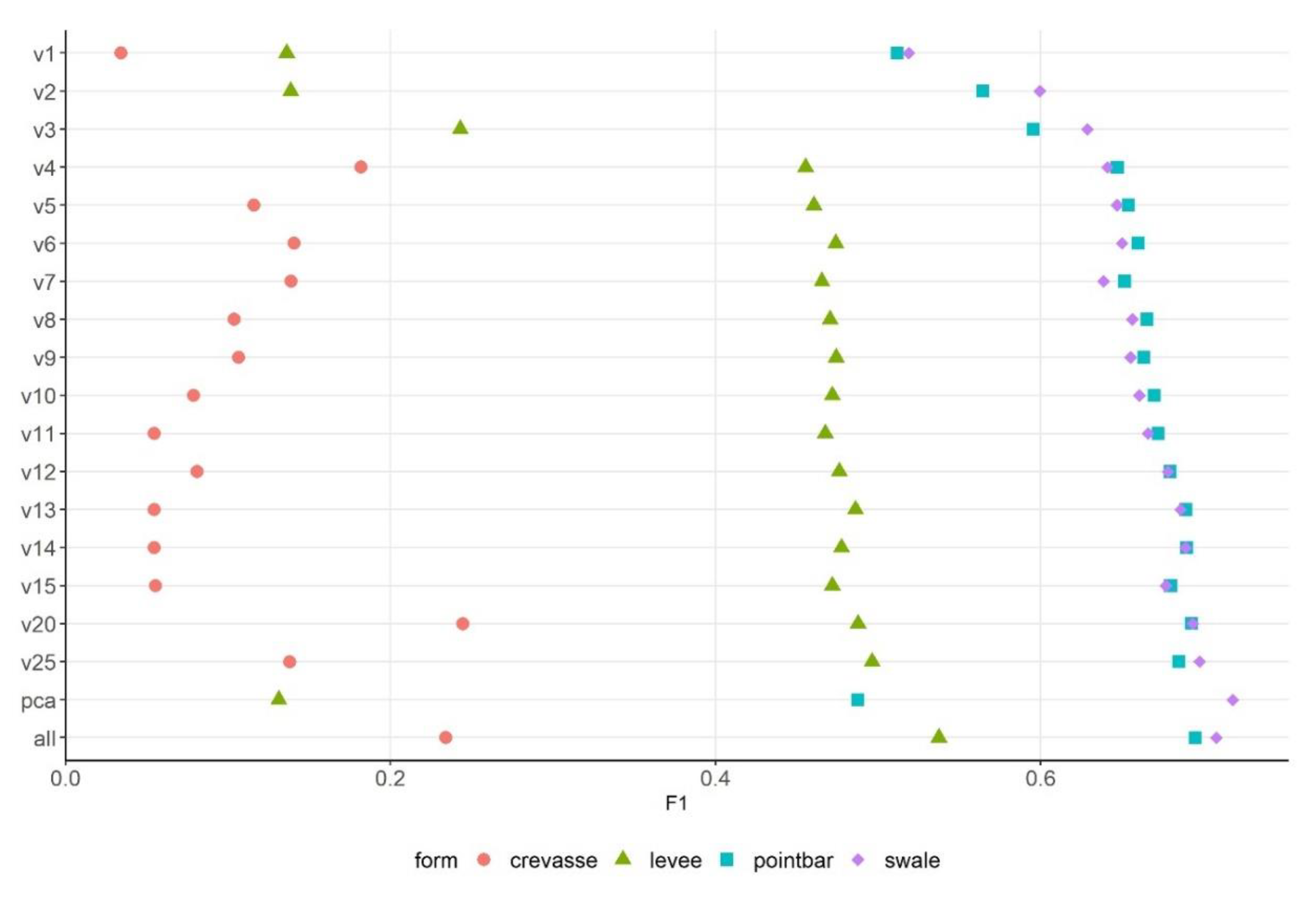
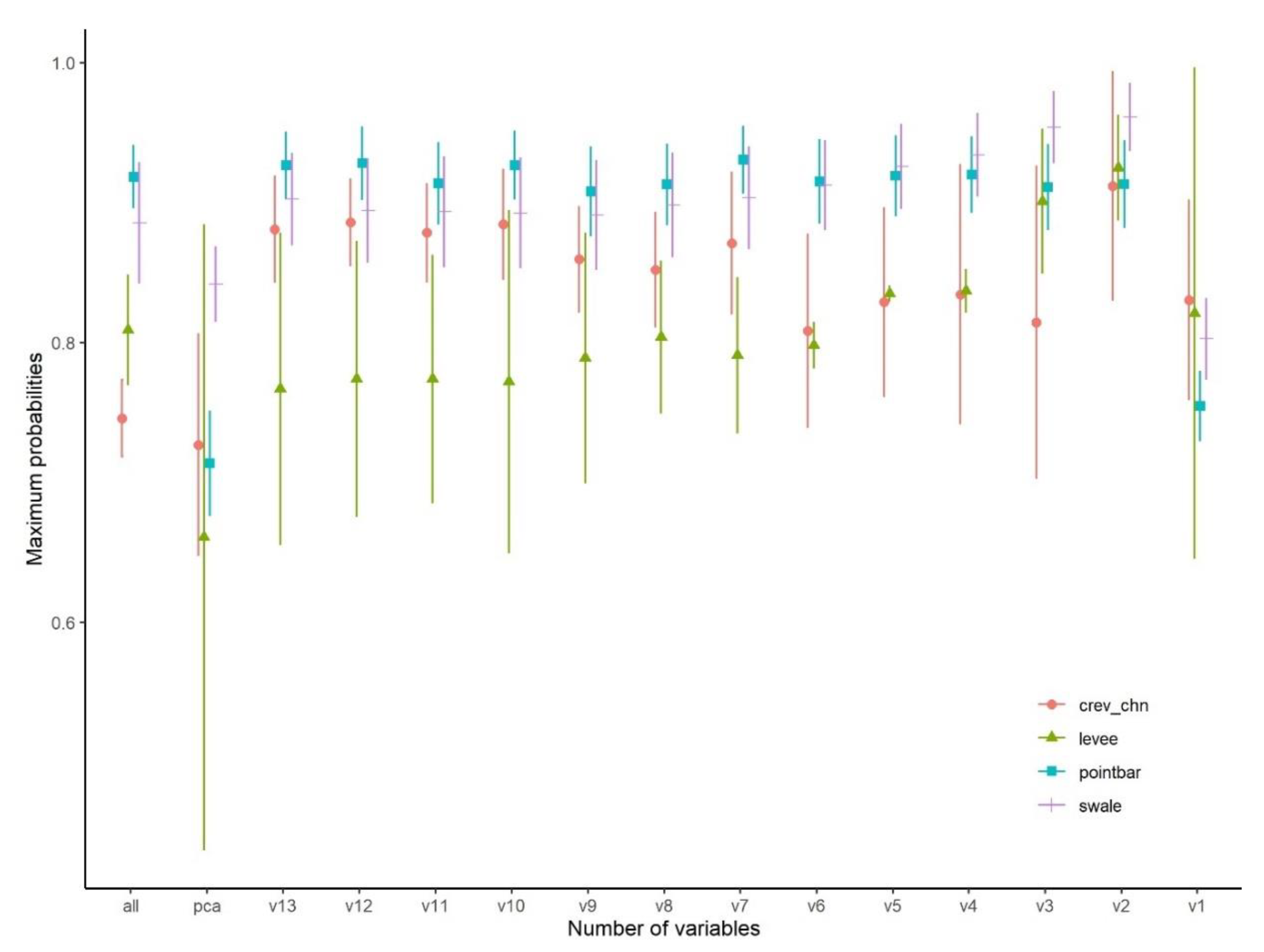
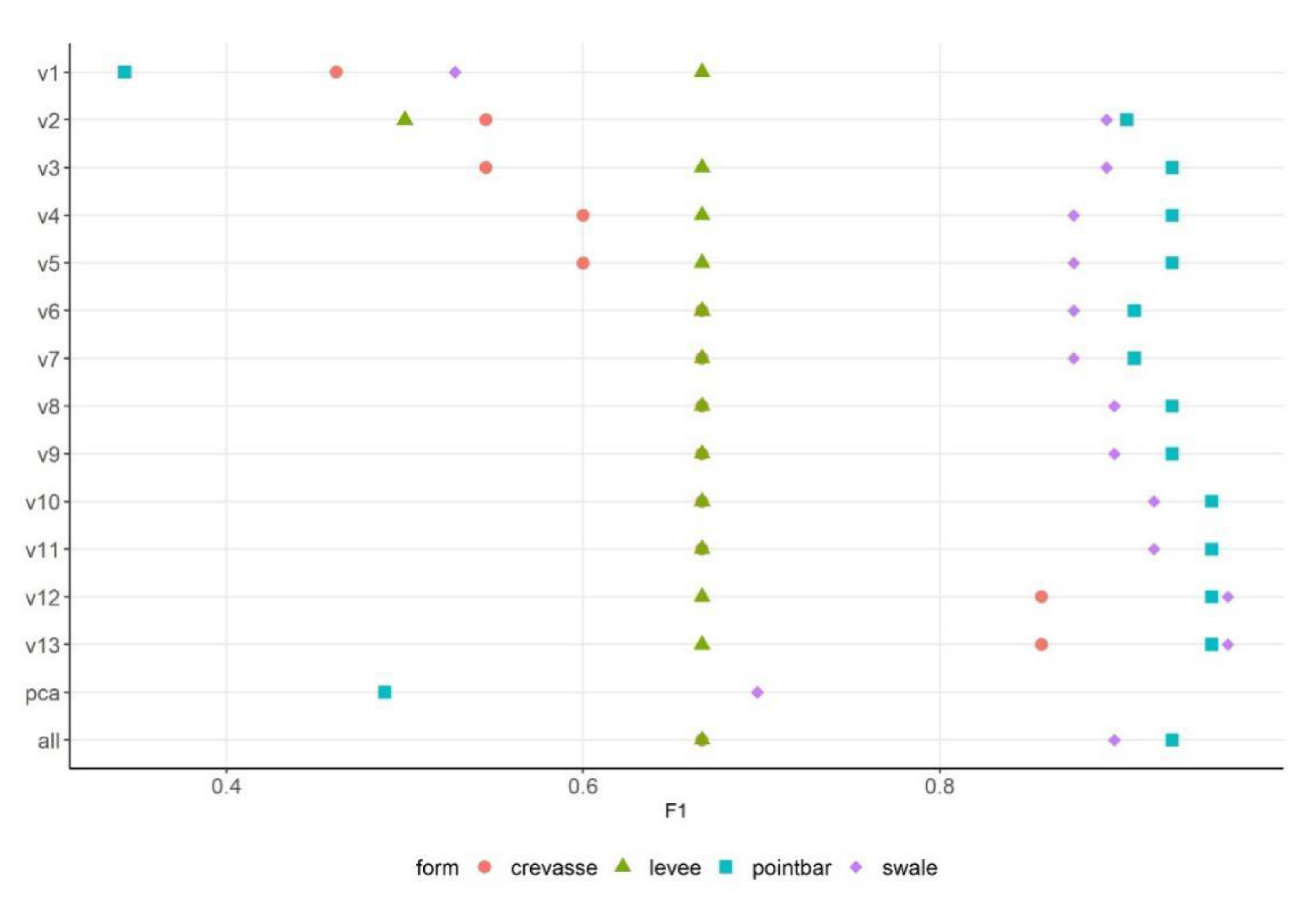
3.3. Class Level Probabilities of Classifications
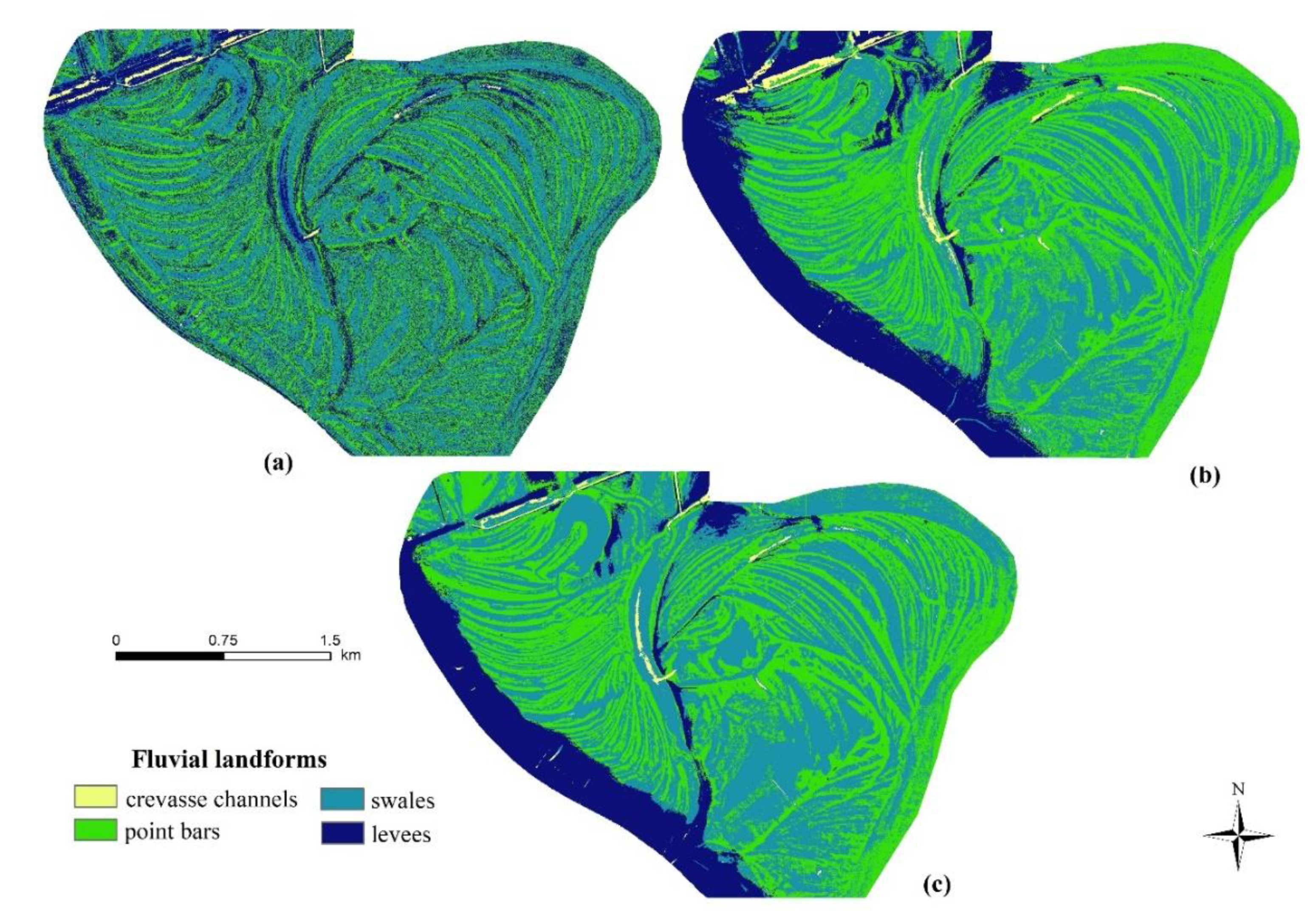
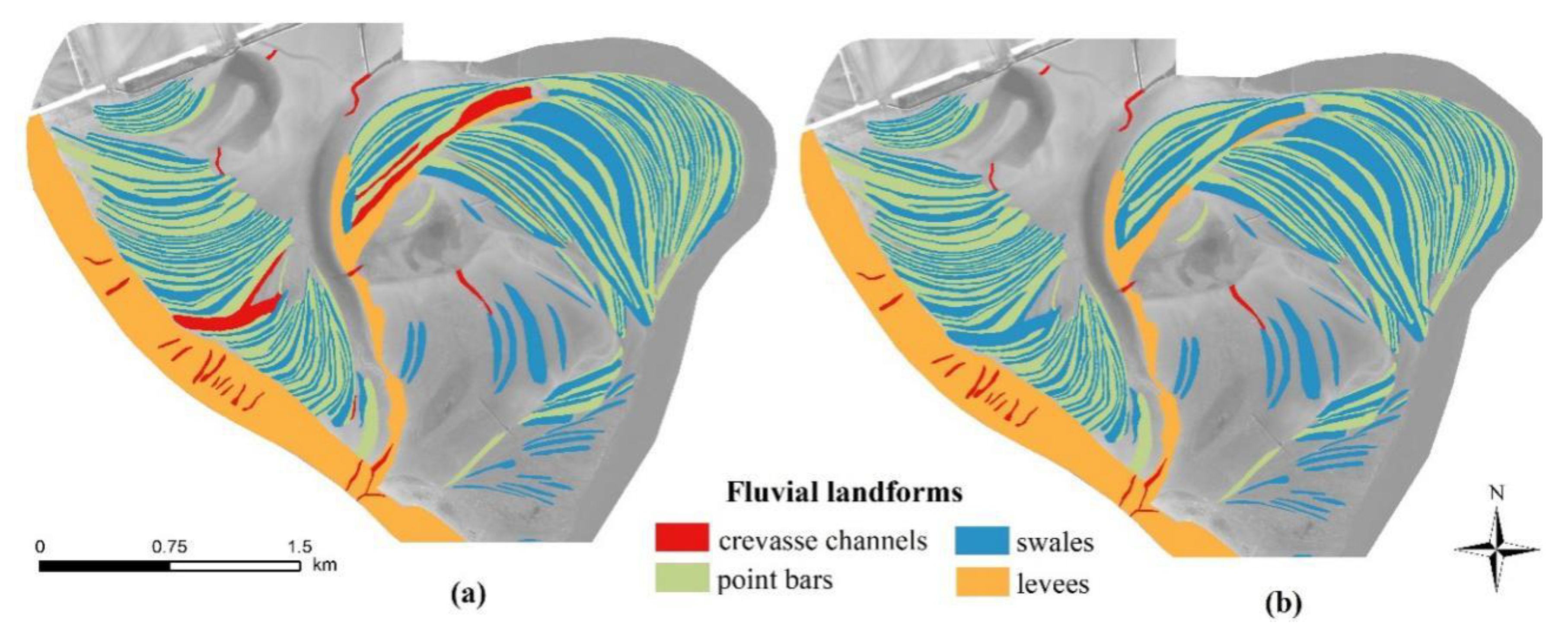
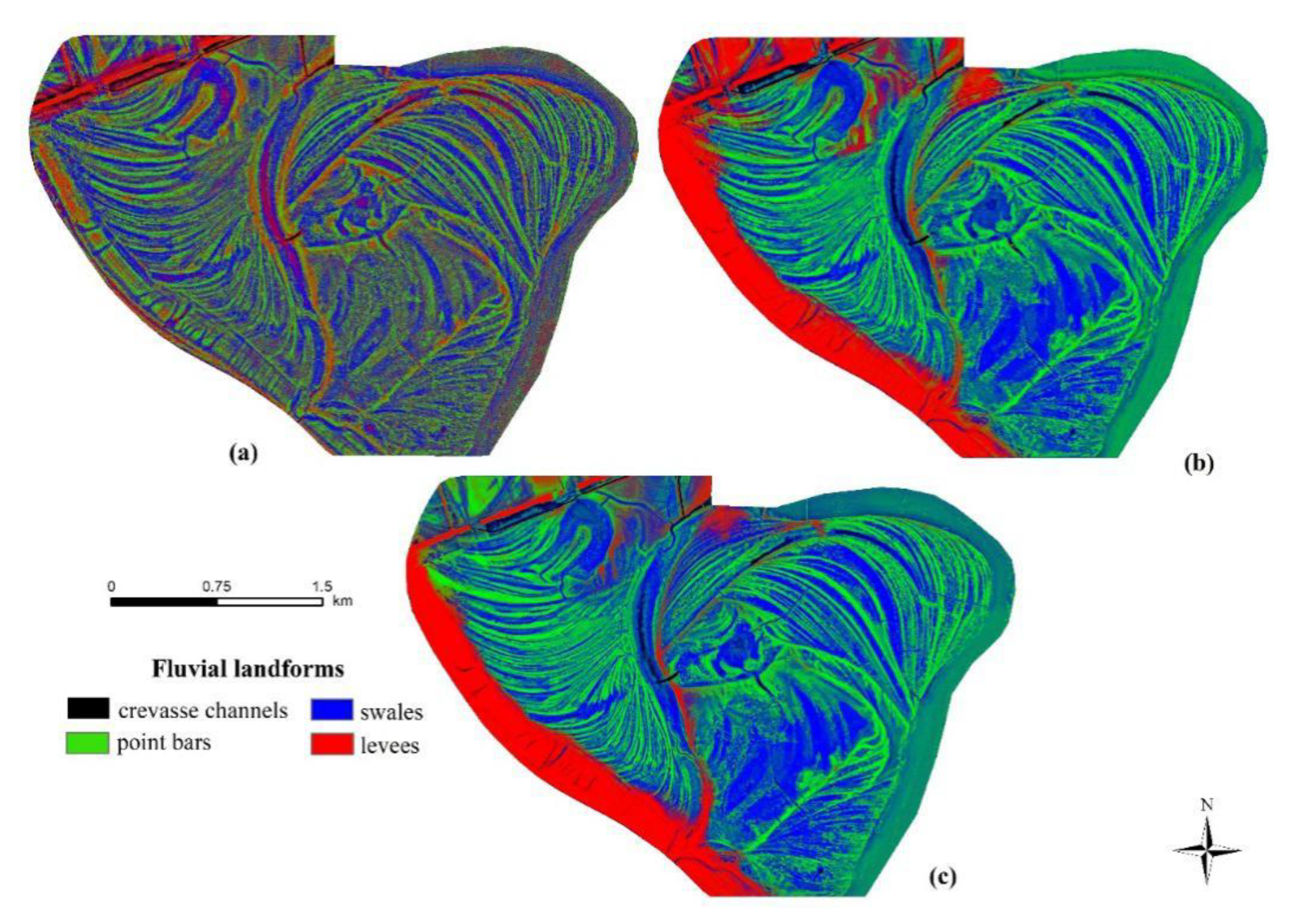
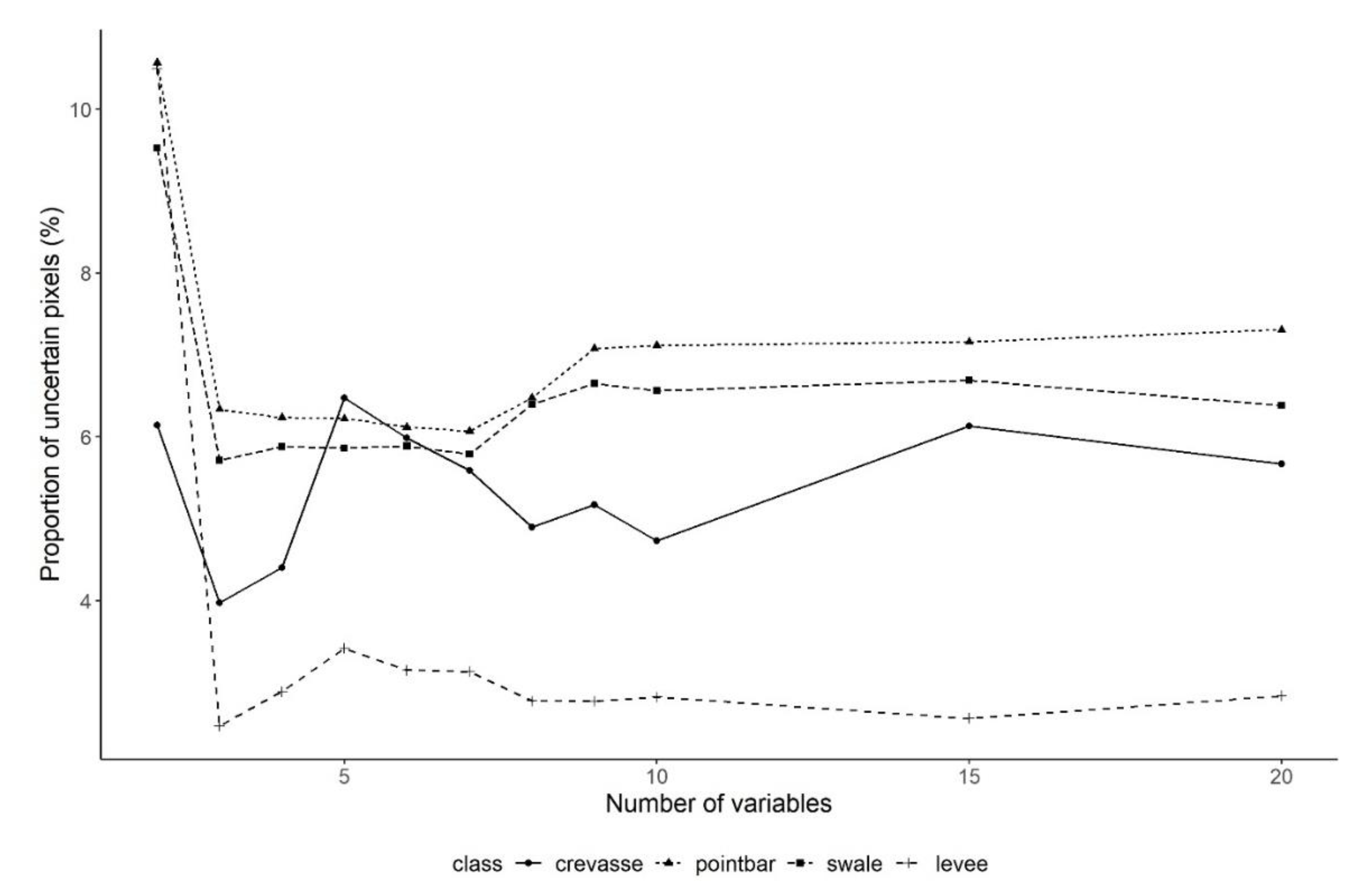
3.4. Spatial Uncertainty Issues
3.5. Result of Overfitting Analysis
4. Discussion
4.1. Object-Oriented and Pixel-Based Classifications
4.2. Variable Selection, Number of Variables and the Issue of Overfit
4.3. Uncertainty
5. Conclusions
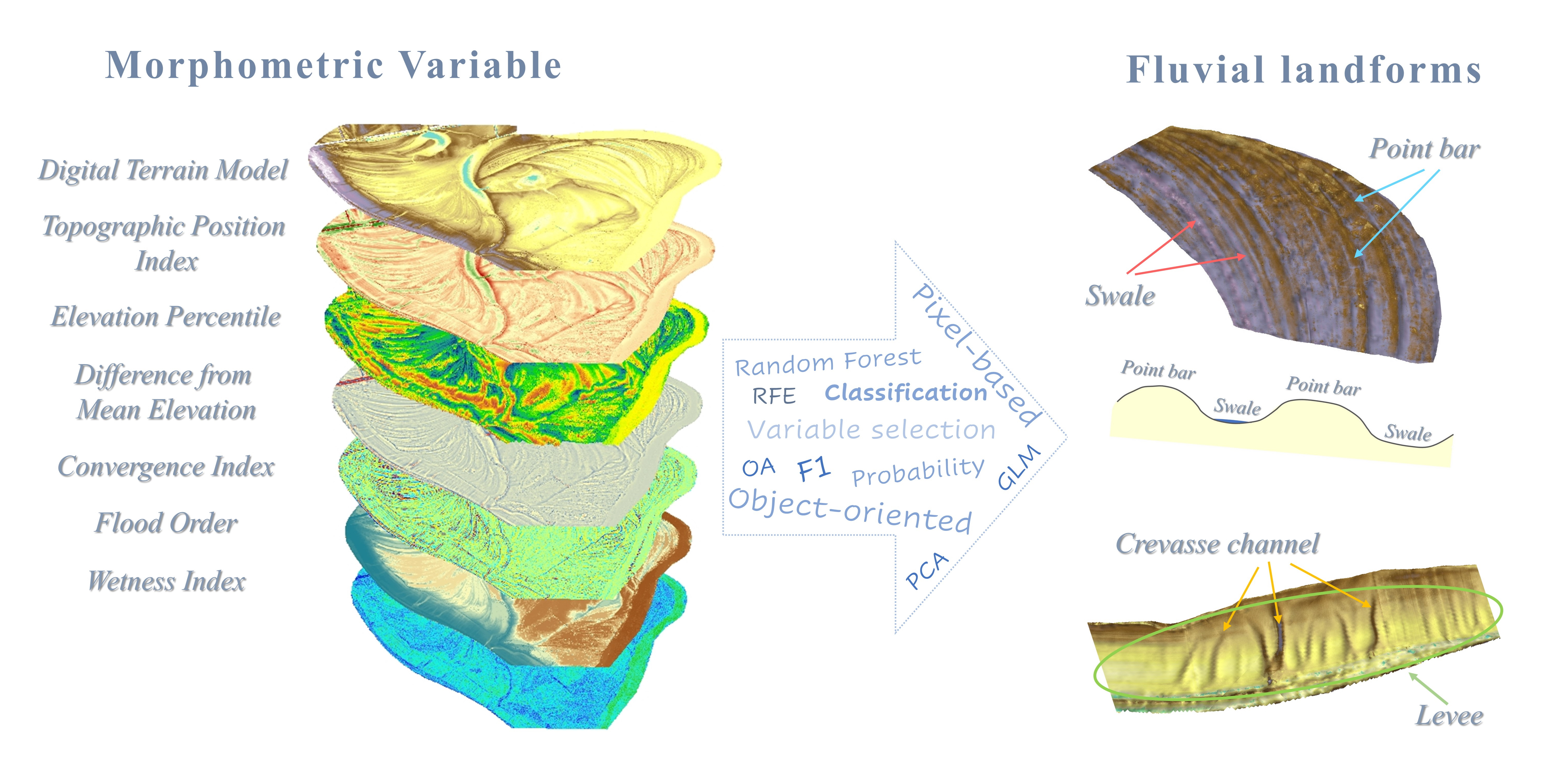
- A large number of morphometric variables can be used efficiently in the identification of levees, crevasse channels, point bars and swales. However, a larger number of variables did not ensure a relevantly better model performance.
- RFE, as a variable selection technique, helped to find the fewest variables making the largest contribution to obtain the grates’ accuracy. Our main finding was that the selected variable set can change by model runs; the maximum OAs were almost the same. Although the variables were not the same in the repeatedly conducted models, we were able to identify the most frequent ones. Involving four variables in the case of the PB-approach and two variables in the case of the OO-approach provided sufficient accuracy, and the errors did not differ relevantly from the maximum number of geomorphometric indices.
- OO and PB-approaches performed differently: the object-oriented approach was more successful with 95% OA, while the 78% OA of the pixel-based approach was a weaker performance; nevertheless, all the forms were identifiable despite the misclassifications.
- The probability of the classifications and the pixel-based spatial uncertainty (as different classification outcomes for the same pixels) was not an appropriate tool to evaluate the classification efficiency, because the values were not in accordance with the class level accuracy metric (F1s).
- Overfitting was in accordance with the optimal number of variables: the lowest level of overfitting coincided with the high OAs of the optimal number of variables.
- We emphasize that the most important variables (GenSurf, Elrel, FlodO, MRVBF1, ConvISR, DevME, DifME) ensured accurate models for fluvial forms, but the selection methodology was more important. Different aims and target geomorphological forms can also be identified with the help of geomorphometry after a careful variable selection.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Wolman, M.G.; Leopold, L.B. River Flood Plains: Some Observations On Their Formation (Physiographic and hydraulic studies of rivers). In Geological Survey Professional Paper 282-C; Pecora, W., Ed.; U.S. Government Printing Office: Washington, DC, USA, 1957; pp. 87–107. [Google Scholar]
- Bridge, J.S.; Demicco, R.V. (Eds.) Earth Surface Processes, Landforms and Sediment. Deposits; Cambridge University Press: Cambridge, UK, 2008; ISBN 978-0-511-45522-3. [Google Scholar]
- Bertalan, L.; Rodrigo-Comino, J.; Surian, N.; Šulc Michalková, M.; Kovács, Z.; Szabó, S.; Szabó, G.; Hooke, J. Detailed assessment of spatial and temporal variations in river channel changes and meander evolution as a preliminary work for effective floodplain management. The example of Sajó River, Hungary. J. Environ. Manag. 2019. [Google Scholar] [CrossRef]
- Brierley, G.J.; Ferguson, R.J.; Woolfe, K.J. What is a fluvial levee? Sediment Geol. 1997, 114, 1–9. [Google Scholar] [CrossRef]
- Palaseanu-Lovejoy, M.; Thatcher, C.A.; Barras, J.A. Levee crest elevation profiles derived from airborne lidar-based high resolution digital elevation models in south Louisiana. ISPRS J. Photogramm. Remote. Sens. 2014, 91, 114–126. [Google Scholar] [CrossRef]
- Fodor, Z. Az ártéri gazdálkodás fokai a tisza mentén. In Proceedings of the Földrajzi Konferencia, Szeged, Hungary, 25–27 October 2001; pp. 1–10. [Google Scholar]
- Bridge, J. (Ed.) Rivers and Floodplains—Forms, Processes and Sedimentary Record; Blackwell Science Ltd.: Oxford, UK, 2003; ISBN 978-0-632-06489-2. [Google Scholar]
- Hickin, E.J. The development of meanders in natural river-channels. Am. J. Sci. 1974, 274, 414–442. [Google Scholar] [CrossRef]
- Nanson, G.C. Point bar and floodplain formation of the meandering Beatton River, northeastern British Columbia, Canada. Sedimentology 1980, 27, 3–29. [Google Scholar] [CrossRef]
- Allen, J.R. A review of the origin and characteristics of recent alluvial sediments. Sedimentology 1965, 5, 89–191. [Google Scholar] [CrossRef]
- Vass, R. Ártérfejlődési Vizsgálatok Felső-tiszai Mintaterületeken (Examination of Fluvial Development on Study Areas of Upper Tisza Region); Tóth könyvkereskedés és Kiadó Kft.: Nyíregyháza, Hungary, 2018; ISBN 978-615-00-1833-1. [Google Scholar]
- Burchsted, D.; Daniels, M.; Wohl, E.E. Introduction to the special issue on discontinuity of fluvial systems. Geomorphology 2014, 205, 1–4. [Google Scholar] [CrossRef]
- Babka, B.; Futó, I.; Szabó, S. Seasonal evaporation cycle in oxbow lakes formed along the Tisza River in Hungary for flood control. Hydrol. Process. 2018, 32, 2009–2019. [Google Scholar] [CrossRef] [Green Version]
- Tamás, M.; Farsang, A. Determination of heavy metal fractions in the sediments of oxbow lakes to detect the human impact on the fluvial system (Tisza River, SE Hungary). Hydrol. Earth Syst. Sci. Discuss. 2016, 1–16. [Google Scholar] [CrossRef] [Green Version]
- Szabó, J.; Vass, R.; Tóth, C. Examination of fluvial development on study areas of Upper-Tisza region. Carpathian J. Earth Environ. Sci. 2012, 7, 241–253. [Google Scholar]
- Kiss, T.; Amissah, G.J.; Fiala, K. Bank processes and revetment erosion of a large lowland river: Case study of the lower Tisza River, Hungary. Water 2019, 11, 1313. [Google Scholar] [CrossRef] [Green Version]
- Nagy, J.; Kiss, T. Point-bar development under human impact: Case study on the Lower Tisza River, Hungary. Geogr. Pannonica 2020, 24, 1–12. [Google Scholar] [CrossRef]
- Newson, M.D.; Newson, C.L. Geomorphology, ecology and river channel habitat: Mesoscale approaches to basin-scle chailenges. Prog. Phys. Geogr. 2000, 24, 195–217. [Google Scholar] [CrossRef]
- Montgomery, D. Geomorphology, River Ecology, and Ecosystem Management. Geomorphic Process. Riverine Habitat 2001, 4, 247–253. [Google Scholar]
- Newson, M.D. Geomorphological concepts and tools for sustainable river ecosystem management. Aquat Conserv. Mar. Freshw. Ecosyst. 2002, 12, 365–379. [Google Scholar] [CrossRef]
- Ortmann-Ajkai, A.; Lóczy, D.; Gyenizse, P.; Pirkhoffer, E. Wetland habitat patches as ecological components of landscape memory in a highly modified floodplain. River Res. Appl. 2014, 30, 874–886. [Google Scholar] [CrossRef]
- Bertalan, L.; Novák, T.J.; Németh, Z.; Rodrigo-Comino, J.; Kertész, Á.; Szabó, S. Issues of meander development: Land degradation or ecological value? The example of the Sajó River, Hungary. Water 2018, 10, 1613. [Google Scholar] [CrossRef] [Green Version]
- Hohausová, E.; Jurajda, P. Restoration of a river backwater and its influence on fish assemblage. Czech J. Anim. Sci. 2005, 50, 473–482. [Google Scholar] [CrossRef] [Green Version]
- Bornette, G.; Amoros, C.; Lamouroux, N. Aquatic plant diversity in riverine wetlands: The role of connectivity. Freshw. Biol. 1998, 39, 267–283. [Google Scholar] [CrossRef]
- Thorndycraft, V.R.; Benito, G.; Gregory, K.J. Fluvial geomorphology: A perspective on current status and methods. Geomorphology 2008, 98, 2–12. [Google Scholar] [CrossRef]
- French, J.R. Airborne LiDAR in support of geomorphological and hydraulic modelling. Earth Surf. Process. Landforms 2003, 28, 321–335. [Google Scholar] [CrossRef]
- Barrile, V.; Bilotta, G.; Fotia, A. Analysis of hydraulic risk territories: Comparison between LIDAR and other different techniques for 3D modeling. WSEAS Trans. Environ. Dev. 2018, 14, 45–52. [Google Scholar]
- Milan, D.J.; Heritage, G.L.; Hetherington, D. Application of a 3D laser scanner in the assesment of erosion and deposition volumes in a proglacial river. Earth Surf. Process. Landforms 2007, 32, 1657–1674. [Google Scholar] [CrossRef]
- Carey, C.; Brown, T.; Challis, K.; Howard, A.; Cooper, A. Predictive modelling of multiperiod geoarchaeological resources at a river confluence: A case study from Trent-Soar, UK. Archaeol. Prospect. 2006, 13, 241–250. [Google Scholar] [CrossRef]
- Alho, P.; Hyyppä, H.; Hyyppä, J. Consequence of DTM precision for flood hazard mapping: A case study in SW Finland. Nord. J. Surv. Real Estate Res. 2009, 6, 21–39. [Google Scholar]
- Cook, A.; Merwade, V. Effect of topographic data, geometric configuration and modeling approach on flood inundation mapping. J. Hydrol. 2009, 377, 131–142. [Google Scholar] [CrossRef]
- Charlton, M.E.; Large, A.R.G.; Fuller, I.C. Application of airborne lidar in river environments: The River Coquet, Northumberland, UK. Earth Surf. Process. Landforms 2003, 28, 299–306. [Google Scholar] [CrossRef]
- Jones, A.F.; Brewer, P.A.; Johnstone, E.; Macklin, M.G. High-resolution interpretative geomorphological mapping of river valley environments using airborne LiDAR data. Earth Surf. Process. Landforms 2007, 32, 1574–1592. [Google Scholar] [CrossRef]
- Hengl, T.; Reuter, H.I. (Eds.) Developments in Soil Science. Geomorphometry. Concepts, Software, Applications; Elsevier, B.V.: Oxford, UK, 2009; ISBN 9780123743459. [Google Scholar]
- Pike, R.J.; Evans, I.S.; Hengl, T. Geomorphometry: A brief guide. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier B.V.: Oxford, UK, 2009; Volume 33, pp. 3–30. [Google Scholar]
- Otto, J.-C.; Prasicek, G.; Blöthe, J.; Schrott, L. GIS applications in geomorphology. In Comprehensive Geographic Information Systems; Huang, B., Ed.; Elsevier Inc.: Bonn, Germany, 2018; pp. 81–111. ISBN 9780128047934. [Google Scholar]
- Dikau, R. The application of a digital relief model to landform analysis in geomorphology. In Three Dimensional Applications in Geographical Information Systems; Taylor and Francis: London, UK, 1989; pp. 51–77. [Google Scholar]
- Pike, R.J. Geomorphometry—diversity in quantitative surface analysis. Prog. Phys. Geogr. 2000, 24, 1–20. [Google Scholar] [CrossRef] [Green Version]
- Györgyövics, K.; Kiss, T. Landscape metrics applied in geomorphology: Hierarchy and morphometric classes of sand dunes in inner Somogy, Hungary. Hungar. Geogr. Bull. 2016, 65, 271–282. [Google Scholar] [CrossRef] [Green Version]
- Enyedi, P.; Pap, M.; Kovács, Z.; Takács-Szilágyi, L.; Szabó, S. Efficiency of local minima and GLM techniques in sinkhole extraction from a LiDAR-based terrain model. Int. J. Digit. Earth 2018, 1067–1082. [Google Scholar] [CrossRef]
- Wilson, J.; Gallant, J. Digital terrain analysis. In Terrain Analysis: Principles and Applications; Wilson, J.P., Gallant, J.C., Eds.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2000; Volume 479, pp. 1–27. ISBN 0471321885. [Google Scholar]
- Gruber, S.; Peckham, S. Land-surface parameters and objects in hydrology. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier B.V.: Oxford, UK, 2009; Volume 33, pp. 171–194. [Google Scholar]
- Del Val, M.; Iriarte, E.; Arriolabengoa, M.; Aranburu, A. An automated method to extract fluvial terraces from LIDAR based high resolution Digital Elevation Models: The Oiartzun valley, a case study in the Cantabrian Margin. Quat. Int. 2015, 364, 35–43. [Google Scholar] [CrossRef]
- Dowling, T.P.F.; Spagnolo, M.; Möller, P. Morphometry and core type of streamlined bedforms in southern Sweden from high resolution LiDAR. Geomorphology 2015, 236, 54–63. [Google Scholar] [CrossRef]
- Passalacqua, P.; Belmont, P.; Foufoula-Georgiou, E. Automatic geomorphic feature extraction from lidar in flat and engineered landscapes. Water Resour. Res. 2012, 48, 1–18. [Google Scholar] [CrossRef] [Green Version]
- Qian, T.; Shen, D.; Xi, C.; Chen, J.; Wang, J. Extracting farmland features from LiDAR-derived DEM for improving flood plain delineation. Water 2018, 10, 252. [Google Scholar] [CrossRef] [Green Version]
- Szabó, Z.; Tóth, C.A.; Tomor, T.; Szabó, S. Airborne LiDAR point cloud in mapping of fluvial forms: A case study of a Hungarian floodplain. GIScience Remote. Sens. 2017, 54, 862–880. [Google Scholar] [CrossRef]
- Hamar, J.; Sárkány-Kiss, A. (Eds.) The Upper Tisa Valley; Tisza Klub & Liga Pro Europa: Szeged, Hungary, 1999. [Google Scholar]
- Envirosense Hungary Kft. SH/2/6—Swiss-Hungarian Programme edited by Envirosense Hungary Kft. Updating the Flood Protection Plans for Sections of the River Tisza under the Management of the Environmental and Water Management Directorate of the Tiszántúl Region and the North Hungarian Environment and Water Directorate; Envirosense Hungary Kft.: Debrecen, Hungary, 2013; p. 77. [Google Scholar]
- Szabó, Z.; Tóth, C.A.; Holb, I.; Szabó, S. Aerial laser scanning data as a source of terrain modeling in a fluvial environment: Biasing factors of terrain height accuracy. Sensors 2020, 20, 2063. [Google Scholar] [CrossRef] [Green Version]
- ESRI Arcgis Desktop: Release 10.5; Environmental Systems Research Institute: Redlands, CA, USA, 2014.
- Conrad, O.; Bechtel, B.; Bock, M.; Dietrich, H.; Fischer, E.; Gerlitz, L.; Wehberg, J.; Wichmann, V.; Böhner, J. System for Automated Geoscientific Analyses (SAGA) v. 2.1.4. Geosci. Model. Dev. 2015, 8, 1991–2007. [Google Scholar] [CrossRef] [Green Version]
- Lindsay, J.B. Whitebox GAT: A Case Study in Geomorphometric Analysis; Elsevier: Amsterdam, The Netherlands, 2016; Volume 95. [Google Scholar]
- Wang, L.; Liu, H. An efficient method for identifying and filling surface depressions in digital elevation models for hydrologic analysis and modelling. Int. J. Geogr. Inf. Sci. 2006, 20, 193–213. [Google Scholar] [CrossRef]
- Lindsay, J.B.; Cockburn, J.M.H.; Russell, H.A.J. An integral image approach to performing multi-scale topographic position analysis. Geomorphology 2015, 245, 51–61. [Google Scholar] [CrossRef]
- Antoni, O.; Hatic, D.; Pernar, R. DEM-based depth in sink as an environmental estimator. Ecol. Modell. 2001, 138, 247–254. [Google Scholar] [CrossRef]
- Hjerdt, K.N.; McDonnell, J.J.; Seibert, J.; Rodhe, A. A new topographic index to quantify downslope controls on local drainage. Water Resour. Res. 2004, 40, 1–6. [Google Scholar] [CrossRef] [Green Version]
- Moore, I.D.; Burch, G.J. Modelling erosion and deposition: Topographic effects. Trans. Am. Soc. Agric. Eng. 1986, 29, 1624–1630. [Google Scholar] [CrossRef]
- Gómez-Gutiérrez, Á.; Conoscenti, C.; Angileri, S.E.; Rotigliano, E.; Schnabel, S. Using topographical attributes to evaluate gully erosion proneness (susceptibility) in two mediterranean basins: Advantages and limitations. Nat. Hazards 2015, 79, 291–314. [Google Scholar] [CrossRef]
- Beven, K.J.; Kirkby, M.J. A physically based, variable contributing area model of basin hydrology. Hydrol. Sci. Bull. 1979, 24, 43–69. [Google Scholar] [CrossRef] [Green Version]
- Zevenbergen, L.W.; Thorne, C.R. Quantitative analysis of land surface topography. Earth Surf. Process. Landforms 1987, 12, 47–56. [Google Scholar] [CrossRef]
- Koethe, R.; Lehmeier, F. SARA—System zur Automatischen Relief-Analyse. User Manual, 2nd ed.; 1996; unpublished. [Google Scholar]
- Olaya, V.; Conrad, O. Geomorphometry in SAGA. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier B.V.: Oxford, UK, 2009; Volume 33, pp. 293–308. [Google Scholar]
- Leempoel, K.; Parisod, C.; Geiser, C.; Daprà, L.; Vittoz, P.; Joost, S. Very high-resolution digital elevation models: Are multi-scale derived variables ecologically relevant? Methods Ecol. Evol. 2015, 6, 1373–1383. [Google Scholar] [CrossRef]
- Blaga, L. Aspects regarding the significance of the curvature types and values in the studies of geomorphometry assisted by GIS. Analele Univ. din Oradea -Ser. Geogr. 2012, 22, 327–337. [Google Scholar]
- Wood, J.D. The Geomorphological Characterisation of Digital Elevation Models. Ph.D. Thesis, University of Leicester, Leicester, UK, 1996. [Google Scholar]
- Shary, P.A.; Sharaya, L.S.; Mitusov, A.V. Fundamental quantitative methods of land surface analysis. Geoderma 2002, 107, 1–32. [Google Scholar] [CrossRef]
- Freeman, T.G. Calculating catchment area with divergent flow based on a regular grid. Comput. Geosci. 1991, 17, 413–422. [Google Scholar] [CrossRef]
- Gallant, J.C.; Dowling, T.I. A multiresolution index of valley bottom flatness for mapping depositional areas. Water Resour. Res. 2003, 39, 1–14. [Google Scholar] [CrossRef]
- Weiss, A. Topographic position and landforms analysis. In Proceedings of the Poster Presentation, ESRI User Conference, San Diego, CA, USA, 9–13 July 2001; Volume 64, pp. 227–245. [Google Scholar]
- Guisan, A.; Weiss, S.B.; Weiss, A.D.; Ecology, S.P.; Weiss, D. GLM versus CCA spatial modeling of plant species distribution. Plant. Ecol. 2011, 143, 107–122. [Google Scholar] [CrossRef]
- Yokoyama, R.; Shirasawa, M.; Pike, R.J. Visualizing topography by openness: A new application of image processing to digital elevation models. Photogramm. Eng. Remote. Sens. 2002, 68, 257–265. [Google Scholar]
- MacMillan, R.A.; Shary, P.A. Landforms and landform elements in geomorphometry. In Developments in Soil Science; Hengl, T., Reuter, H.I., Eds.; Elsevier B.V.: Oxford, UK, 2009; Volume 33, pp. 227–254. ISBN 0166-2481. [Google Scholar]
- Cristea, N.C.; Breckheimer, I.; Raleigh, M.S.; HilleRisLambers, J.; Lundquist, J.D. An evaluation of terrain-based downscaling of fractional snow covered area data sets based on LiDAR-derived snow data and orthoimagery. Water Resour. Res. 2017, 53, 6802–6820. [Google Scholar] [CrossRef]
- Sappington, J.M.; Longshore, K.M.; Thomson, D.B. Quantifying landscape ruggedness for animal habitat analysis: A case study using bighorn sheep in the Mojave Desert. J. Wildl. Manag. 2007, 71, 1419–1426. [Google Scholar] [CrossRef]
- Chen, Q.; Meng, Z.; Liu, X.; Jin, Q.; Su, R. Decision variants for the automatic determination of optimal feature subset in RF-RFE. Genes 2018, 9, 301. [Google Scholar] [CrossRef] [Green Version]
- Kuhn, M.; Wing, J.; Weston, S.; Williams, A.; Keefer, C.; Engelhardt, A.; Cooper, T.; Mayer, Z.; Ziem, A.; Scrucca, L.; et al. Package ‘ caret ’ R: Classification and Regression Training; Version 6.0-86. CRAN Repository; 2020. [Google Scholar]
- Belgiu, M.; Drăgut, L. Random forest in remote sensing: A review of applications and future directions. ISPRS J. Photogramm. Remote. Sens. 2016, 114, 24–31. [Google Scholar] [CrossRef]
- Breiman, L. Random Forest. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef] [Green Version]
- Gislason, P.O.; Benediktsson, J.A.; Sveinsson, J.R. Random forests for land cover classification. Pattern Recognit. Lett. 2006, 27, 294–300. [Google Scholar] [CrossRef]
- Jin, Y.; Liu, X.; Chen, Y.; Liang, X. Land-cover mapping using Random Forest classification and incorporating NDVI time-series and texture: A case study of central Shandong. Int. J. Remote. Sens. 2018, 39, 8703–8723. [Google Scholar] [CrossRef]
- Eisavi, V.; Homayouni, S.; Yazdi, A.M.; Alimohammadi, A. Land cover mapping based on random forest classification of multitemporal spectral and thermal images. Environ. Monit. Assess. 2015, 187, 1–14. [Google Scholar] [CrossRef]
- Schlosser, A.D.; Szabó, G.; Bertalan, L.; Varga, Z.; Enyedi, P.; Szabó, S. Building extraction using orthophotos and dense point cloud derived from visual band aerial imagery based on machine learning and segmentation. Remote. Sens. 2020, 12, 2397. [Google Scholar] [CrossRef]
- Phinzi, K.; Abriha, D.; Bertalan, L.; Holb, I.; Szabó, S. Machine learning for gully feature extraction based on a pan-sharpened multispectral image: Multiclass vs. Binary approach. ISPRS Int. J. Geo-Inf. 2020, 9, 252. [Google Scholar] [CrossRef] [Green Version]
- Zhu, J.; Pierskalla, W.P. Applying a weighted random forests method to extract karst sinkholes from LiDAR data. J. Hydrol. 2016, 533, 343–352. [Google Scholar] [CrossRef]
- Lawrence, R.L.; Wood, S.D.; Sheley, R.L. Mapping invasive plants using hyperspectral imagery and Breiman Cutler classifications (RandomForest). Remote. Sens. Environ. 2006, 100, 356–362. [Google Scholar] [CrossRef]
- Therneau, T.; Atkinson, B.; Ripley, B. Package rpart: Recursive Partitioning and Regression Trees; Version 4.1-15. CRAN Repository; 2019. [Google Scholar]
- Van der Linden, S.; Rabe, A.; Held, M.; Jakimow, B.; Leitão, P.J.; Okujeni, A.; Schwieder, M.; Suess, S.; Hostert, P. The EnMAP-box-A toolbox and application programming interface for EnMAP data processing. Remote. Sens. 2015, 7, 11249–11266. [Google Scholar] [CrossRef] [Green Version]
- Congalton, R.G. A review of assessing the accuracy of classifications of remotely sensed data. Remote. Sens. Environ. 1991, 37, 35–46. [Google Scholar] [CrossRef]
- Powers, D.M.W. Evaluation: From Precision, Recall and F-Factor to ROC, Informedness, Markedness & Correlation; Technical Report; School of Informatics and Engineering Flinders University of South Australia: Adelaide, Australia, 2007. [Google Scholar]
- Chicco, D.; Jurman, G. The advantages of the Matthews correlation coefficient (MCC) over F1 score and accuracy in binary classification evaluation. BMC Genom. 2020, 21, 1–13. [Google Scholar] [CrossRef] [Green Version]
- Boström, H. Estimating class probabilities in random forest. In Proceedings of the Proceedings–6th International Conference on Machine Learning and Applications (ICMLA 2007), Cincinnati, OH, USA, 13–15 December 2007; pp. 211–216. [Google Scholar]
- Lima, E.D.P.; Barreto, S.M.; Assunção, A.Á. Factor structure, internal consistency and reliability of the Posttraumatic Stress Disorder Checklist (PCL): An exploratory study. Trends Psychiatry Psychother. 2012, 34, 215–222. [Google Scholar] [CrossRef] [Green Version]
- Albers, C.; Lakens, D. When power analyses based on pilot data are biased: Inaccurate effect size estimators and follow-up bias. J. Exp. Soc. Psychol. 2018, 74, 187–195. [Google Scholar] [CrossRef] [Green Version]
- Field, A. Discovering Statistics Using IBM SPSS Statistics, 4th ed.; SAGE Publications Ltd.: London, UK, 2013; ISBN 978-9351500827. [Google Scholar]
- Gallucci, M. Package Gamlj: GAMLj Suite for Jamovi; Version 2.0.5. GitHub Repository; 2020. [Google Scholar]
- Wei, T.; Simko, V.; Levy, M.; Xie, Y.; Jin, Y.; Zemla, J. R package “corrplot”: Visualization of a Correlation Matrix. Statistician 2017, 56, 316–324. [Google Scholar]
- Gudiyangada Nachappa, T.; Kienberger, S.; Meena, S.R.; Hölbling, D.; Blaschke, T. Comparison and validation of per-pixel and object-based approaches for landslide susceptibility mapping. Geomatics, Nat. Hazards Risk 2020, 11, 572–600. [Google Scholar] [CrossRef]
- Kamal, M.; Phinn, S. Hyperspectral data for mangrove species mapping: A comparison of pixel-based and object-based approach. Remote. Sens. 2011, 3, 2222–2242. [Google Scholar] [CrossRef] [Green Version]
- Belgiu, M.; Csillik, O. Sentinel-2 cropland mapping using pixel-based and object-based time-weighted dynamic time warping analysis. Remote. Sens. Environ. 2018, 204, 509–523. [Google Scholar] [CrossRef]
- Whiteside, T.G.; Boggs, G.S.; Maier, S.W. Comparing object-based and pixel-based classifications for mapping savannas. Int. J. Appl. Earth Obs. Geoinf. 2011, 13, 884–893. [Google Scholar] [CrossRef]
- Rotigliano, E.; Martinello, C.; Agnesi, V.; Conoscenti, C. Evaluation of debris flow susceptibility in El Salvador (CA): A comparisobetween multivariate adaptive regression splines (MARS) and binary logistic regression (BLR). Hungarian Geogr. Bull. 2018, 67, 361–373. [Google Scholar] [CrossRef] [Green Version]
- Varga, O.G.; Szabó, S.; Túri, Z. Efficiency assessments of GEOBIA in land cover analysis, NE Hungary. Bull. Environ. Sci. Res. 2014, 3, 1–9. [Google Scholar]
- Szabó, L.; Burai, P.; Deák, B.; Dyke, G.J.; Szabó, S. Assessing the efficiency of multispectral satellite and airborne hyperspectral images for land cover mapping in an aquatic environment with emphasis on the water caltrop (Trapa natans). Int. J. Remote. Sens. 2019, 40, 5192–5215. [Google Scholar] [CrossRef]
- Lin, C.W.; Wen, T.C.; Setiawan, F. Evaluation of vertical ground reaction forces pattern visualization in neurodegenerative diseases identification using deep learning and recurrence plot image feature extraction. Sensors 2020, 20, 3857. [Google Scholar] [CrossRef]
- Machidon, A.L.; Del Frate, F.; Picchiani, M.; Machidon, O.M.; Ogrutan, P.L. Geometrical approximated principal component analysis for hyperspectral image analysis. Remote. Sens. 2020, 12, 1698. [Google Scholar] [CrossRef]
- Scarrott, R.G.; Cawkwell, F.; Jessopp, M.; O’Rourke, E.; Cusack, C.; De Bie, K. From land to sea, a review of hypertemporal remote sensing advances to support ocean surface science. Water 2019, 11, 2286. [Google Scholar] [CrossRef] [Green Version]
- Prieto-Amparán, J.A.; Pinedo-Alvarez, A.; Vázquez-Quintero, G.; Valles-Aragón, M.C.; Rascón-Ramos, A.E.; Martinez-Salvador, M.; Villarreal-Guerrero, F. A multivariate geomorphometric approach to prioritize erosion-prone watersheds. Sustainability 2019, 11, 5140. [Google Scholar] [CrossRef] [Green Version]
- Lecours, V.; Simms, A.; Devillers, R.; Lucieer, V.; Edinger, E. Finding the Best Combinations of Terrain Attributes and GIS software for Meaningful Terrain Analysis. In Geomorphometry for Geosciences; Jasiewicz, J., Zwolinski, Z., Mitasova, H., Hengl, T., Eds.; Bogucki Wydawnictwo Naukowe, Adam Mickiewicz University in Poznan - Institute of Geoecology and Geoinformation: Poznan, Poland, 2015; pp. 133–136. [Google Scholar]
- Ahmadi, K.; Kalantar, B.; Saeidi, V.; Harandi, E.K.G.; Janizadeh, S.; Ueda, N. Comparison of Machine Learning Methods for Mapping the Stand Characteristics of Temperate Forests Using Multi-Spectral Sentinel-2 Data. Remote. Sens. 2020, 12, 3019. [Google Scholar] [CrossRef]
- Szabó, Z.; Buró, B.; Szabó, J.; Tóth, C.A.; Baranyai, E.; Herman, P.; Prokisch, J.; Tomor, T.; Szabó, S. Geomorphology as a driver of heavy metal accumulation patterns in a floodplain. Water 2020, 12, 563. [Google Scholar] [CrossRef] [Green Version]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ID1 | Terrain Attributes * | Description | Abbreviations | Settings | References |
|---|---|---|---|---|---|
| 1 | Flood Order | It creates the flood order of grid cells, which are encountered during a search, starting from the raster edges and the lowest cell, moving inward at increasing elevations. | FlodO | - | [53,54] |
| 2 | Elevation Relative To Min and Max | It expresses the elevation of a grid cell in the DTM as a percentage of the relief between the DTM minimum and maximum values. | ElRel | - | [53] |
| 3–5 | Deviation from Mean Elevation | The difference between the elevation of each cells and the mean elevation of the centering local neighborhood, normalized by standard deviation. | DevME1 | Search Neighborhood Size: 8 | [41,53] |
| DevME2 | Search Neighborhood Size: 16 | ||||
| DevME3 | Search Neighborhood Size: 32 | ||||
| 6–8 | Difference from Mean Elevation | The difference between the elevation of each grid cell and the mean elevation in its local neighborhood (a user-specified rectangular area). | DifME1 | Search Neighborhood Size: 8 | [41,55] |
| DifME2 | Search Neighborhood Size: 16 | ||||
| DifME3 | Search Neighborhood Size: 32 | ||||
| 9–10 | Maximum Elevation Deviation (Multiscale) Scale Magnitude | It calculates the maximum value of deviation from mean elevation across a range of spatial scales. One of the two output rasters is a raster containing the scale at which the maximum occurred (scale). The other output is a raster containing this maximum deviation value (magnitude). | MxEMs | Defaults | [55] |
| MxEMm | Maximum Neighborhood Radius (cell): 1498 | ||||
| 11 | Depth in sink | A depression depth for each depression cell. | DpthS | - | [53,56] |
| 12 | Downslope Index (radius) | A measure of the slope gradient, within a specified radius, between a cell and the nearest downslope location that represents a specified vertical drop. | DwnsIR | Head potential drop (d): 2 | [53,57] |
| 13–15 | Elevation Percentile | It calculates the elevation percentile based on an image histogram in a user-specified window. | ElevP1 | Search Neighborhood Size: 8 | [53] |
| ElevP2 | Search Neighborhood Size: 16 | ||||
| ElevP3 | Search Neighborhood Size: 32 | ||||
| 16 | Map Gully Depth | It calculates using the difference from the mean elevation and accounts for the fact that gullies are differentiated from ravines or larger valleys because they have widths and maximum cross-sectional depths that are less than the specified parameters (the maximum gully width, the minimum and maximum gully depths, a threshold in difference from the mean elevation, a plan curvature threshold, and a smoothing parameter). | MapGI | - | [53] |
| 17 | Multiscale Elevation Residual Index | It uses a range of spatial scales to describe the relative landscape position of a location. For each grid cell, it calculates the difference from the mean elevation. | MltERI | - | [55] |
| 18 | Maximum Downslope Elevation Change | The maximum elevation drop between each grid cell and its neighbor cells in a 3 × 3 window. | MxDwEC | - | [53] |
| 19 | Minimum Downslope Elevation Change | The minimum elevation drop between each grid cell and its neighbor cells in a 3 × 3 window. | MnDwEC | - | [53] |
| 20 | Sediment Transport Index | The transport capacity index. It combines the upslope contributing area, in accordance with the assumption that the contributing area is directly related to discharge and slope. | SedTI | - | [58,59] |
| 21 | Wetness Index | The TOPMODEL index. It describes the spatial distribution of zones of saturates. | WetnsI | Defaults | [59,60] |
| 22 | Aspect | The direction in which the steepest slope of the plane tangent faces (slope azimuth). | Asp | Defaults | [61] |
| 23 | Slope | The angle made by the plane and the horizontal surface (slope gradient). | Slope | Defaults | [61] |
| 24–27 | SAGA Wetness Index Catchment Area Catchment Slope Modified Catchment Area Topographic Wetness Index | The wetness index describes the tendency of a location to accumulate water. The catchment area is the area that drains into the catchment outlet. The catchment slope is the average slope over the catchment. The modified catchment area is based on a calculation, which does not assume that the flow is a very thin film. | CatchA CatchS ModCA TWI | Defaults Defaults Defaults Defaults | [36,41] |
| 28 | Convergence Index | It calculates an index of convergence (negative value)/divergence (positive value) regarding the overland flow, using the aspect or gradient of the surrounding cells. It is similar to the plan curvature, but does not depend on absolute height differences. This version uses a filter of 2 × 2 or 3 × 3 cells. | ConvI | Defaults | [62,63] |
| 29 | Convergence Index (Search Radius) | This version of the convergence index uses a search radius. | ConvISR | Defaults | [62,63] |
| 30–31 | Downslope Distance Gradient Gradient Gradient Difference | It measures downslope controls on local drainage. There are two output layers: one is the gradient, the other is the difference from the local gradient. | Grad GradDif | Defaults Defaults | [57,64] |
| 32 | Plan Curvature | The curvature in the horizontal plane (contour or horizontal curvature). | PlanCurv | Defaults | [61] |
| 33 | Profile Curvature | The slope variation in the vertical plane (slope profile curvature). The importance of this is that it reveals the character of the surface (convex, concave, horizontal). | ProfCurv | Defaults | [61,65] |
| 34 | Tangential Curvature | The plan curvature multiplied by the sine of the slope. | TangCurv | Defaults | [41,65] |
| 35 | Cross-Sectional Curvature | The tangential curvature intersecting with the plane defined by the normal surface and a tangent to the contour. | CrSCurv | Defaults | [52,66] |
| 36 | Longitudinal Curvature | The profile curvature intersecting with the plane defined by the normal surface and maximum gradient direction. | LongCurv | Defaults | [52,66] |
| 37 | General Curvature | The second derivative value of a surface; a general measure of the land convexity. | GenCurv | Defaults | [59,65] |
| 38 | Maximum Cuvature | The maximum convexity in any plane. | MaxCurv | Defaults | [66,67] |
| 39 | Minimum Curvature | The minimum convexity in any plane. | MinCurv | Defaults | [66,67] |
| 40 | Total Curvature | Used as a measure of surface curvature. | TotCurv | Defaults | [41] |
| 41–45 | Upslope and downslope curvature Local Curvature Upslope Curvature Downslope Curvature Local Upslope Curvature Local Downslope Curvature | It calculates the local curvature of a cell as the sum of the gradients to its neighbor cells. | LocCurv UpSlCurv DwSlCur LUpSCurv LDWSCurv | Defaults Defaults Defaults Defaults Defaults | [52,68] |
| 46–49 | Multiresolution Index of Valley Bottom Flatness Multiresolution Index of Valley Bottom Flatness Multiresolution Ridge Top Flatness Index | Multiresolution index of valley bottom flatness identifies valley bottoms using their flatness and lowness characteristics. Lowness is measured by a ranking of the elevation in a circular area, and flatness by the inverse of the slope. The multiresolution ridge top flatness index identifies ridge tops. It uses a very similar method to MRVBF, only the upper parts of the landscape are identified from the elevation percentile. | MRVBF1 | Defaults | [69] |
| MRVBF2 | Initial threshold for slope: 8 | ||||
| MRRTF1 | Defaults | ||||
| MRRTF2 | Initial threshold for slope: 8 | ||||
| 50 | Topographic Position Index | It compares a cell value to the mean value of its neighbors in a user-specified window. Positive values are features, which are typically higher than surrounding ones, negative values represent lower features, and values near to zero are either flat or areas of constant slope. | TPI | Defaults | [70] |
| 51–52 | Multi-Scale Topographic Position Index | The topographic Position Index (TPI) compares the elevation of each cell to the mean elevation of what surrounds that cell. Multi-Scale-TPI calculates the TPI for different scales and integrates these into one single layer. Positive values are higher (ridges); negative values are lower (valley) than their surroundings. | MS-TPI1 | Defaults | [41,70,71] |
| MS-TPI2 | Min Scale: 8 Max Scale: 8 | ||||
| 53 | Generalized Surface | The smoothed input DTM. | GenSurf | Defaults | [52,66] |
| 54 | Morphometric Protection Index | It analyses the surroundings of each cell up to a given distance and indicates how the relief protects it. | ProtInd | Defaults | [72] |
| 55–56 | Valley Depth Valley Depth Ridge Level | Ridge level is calculated by the vertical distance to a channel network base level. Valley depth is calculated as the difference between the elevation and the ridge level. | Valdpth RidgLvl | Defaults Defaults | [40,73] |
| 57 | Diurnal Anisotropic Heating | It uses slope and aspect and addresses diurnal heat balance as influenced by topography. | DiurnAH | Defaults | [34,74] |
| 58 | Morphometric features | A multi-scale approach. It classifies morphometric features (peaks, ridges, passes, channels, pits and planes) on the DTM using the slope, aspect and curvature of the surface. | MorfFeat | Defaults | [66] |
| 59 | Terrain Ruggedness Index | It measures the terrain ruggedness by using the sum of changes in elevation within an area. | TRI | Defaults | [75] |
| 60 | Vector Ruggedness Measure | It combines the aspect and slope to quantify terrain ruggedness by measuring the dispersion of vectors orthogonal to the terrain surface. | VRM | Defaults | [75] |
| Statistic | PC1 | PC2 | PC3 | PC4 | PC5 |
|---|---|---|---|---|---|
| SS loadings | 10.31 | 8.69 | 8.58 | 4.18 | 2.55 |
| Proportion variance | 0.23 | 0.20 | 0.20 | 0.09 | 0.06 |
| Cumulative variance | 0.23 | 0.43 | 0.63 | 0.72 | 0.78 |
| Statistic | PC1 | PC2 | PC3 | PC4 | PC5 |
|---|---|---|---|---|---|
| SS loadings | 20.29 | 19.02 | 7.38 | 4.44 | 2.35 |
| Proportion variance | 0.33 | 0.31 | 0.12 | 0.07 | 0.04 |
| Cumulative variance | 0.33 | 0.63 | 0.75 | 0.82 | 0.86 |
| Parameters | SS | df | F | p | ω² |
|---|---|---|---|---|---|
| Model | 3.3757 | 4 | 122.18 | <0.001 | 0.869 |
| Fluvial form | 3.3436 | 3 | 161.36 | <0.001 | 0.863 |
| Number of variables | 0.023 | 1 | 3.33 | 0.072 | 0.004 |
| Residuals | 0.4697 | 68 | |||
| Total | 3.8454 | 72 |
| Parameters | SS | df | F | p | ω² |
|---|---|---|---|---|---|
| Model | 0.7663 | 4 | 15.86 | <0.001 | 0.515 |
| Fluvial form | 0.7394 | 3 | 20.41 | <0.001 | 0.504 |
| Number of variables | 0.027 | 1 | 2.23 | 0.141 | 0.011 |
| Residuals | 0.6159 | 51 | |||
| Total | 1.3823 | 55 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csatáriné Szabó, Z.; Mikita, T.; Négyesi, G.; Varga, O.G.; Burai, P.; Takács-Szilágyi, L.; Szabó, S. Uncertainty and Overfitting in Fluvial Landform Classification Using Laser Scanned Data and Machine Learning: A Comparison of Pixel and Object-Based Approaches. Remote Sens. 2020, 12, 3652. https://doi.org/10.3390/rs12213652
Csatáriné Szabó Z, Mikita T, Négyesi G, Varga OG, Burai P, Takács-Szilágyi L, Szabó S. Uncertainty and Overfitting in Fluvial Landform Classification Using Laser Scanned Data and Machine Learning: A Comparison of Pixel and Object-Based Approaches. Remote Sensing. 2020; 12(21):3652. https://doi.org/10.3390/rs12213652
Chicago/Turabian StyleCsatáriné Szabó, Zsuzsanna, Tomáš Mikita, Gábor Négyesi, Orsolya Gyöngyi Varga, Péter Burai, László Takács-Szilágyi, and Szilárd Szabó. 2020. "Uncertainty and Overfitting in Fluvial Landform Classification Using Laser Scanned Data and Machine Learning: A Comparison of Pixel and Object-Based Approaches" Remote Sensing 12, no. 21: 3652. https://doi.org/10.3390/rs12213652