
Estimation of Fuzzy Parameters in the Linear Muskingum Model with the Aid of Particle Swarm Optimization


Abstract
:1. Introduction
2. Materials and Methods
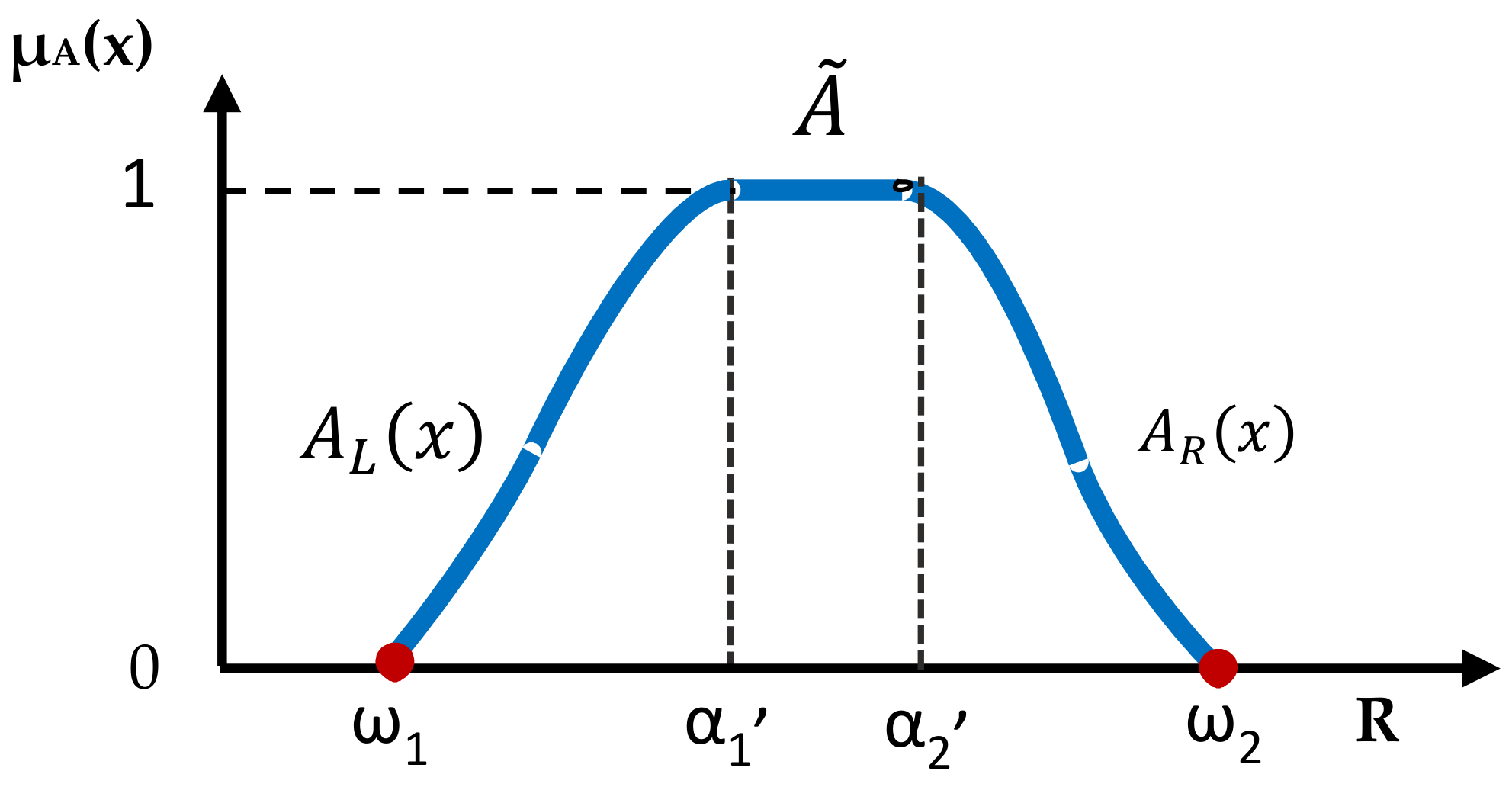
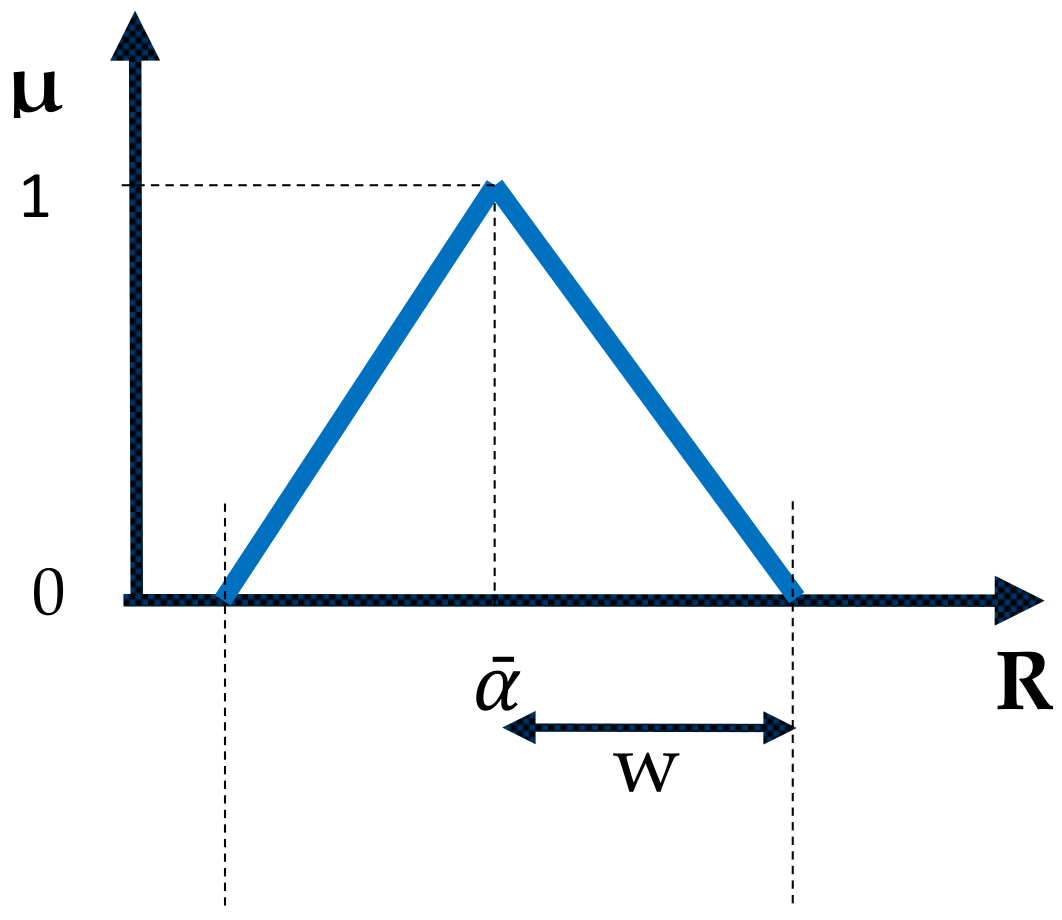
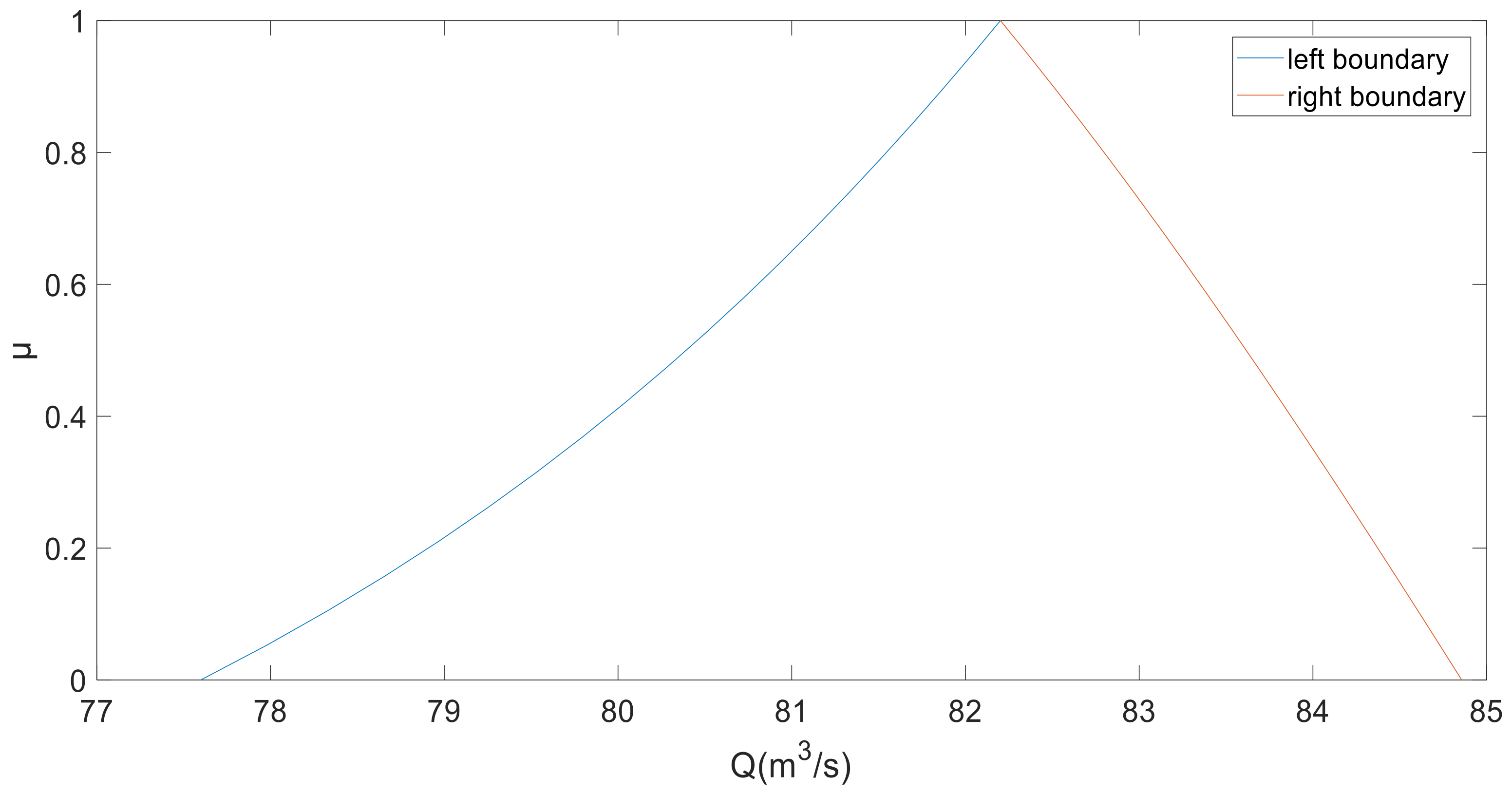
2.1. Principles of Fuzz Set and Logic
2.2. Formulation of the Muskingum Method
2.3. Implementation of the Muskingum Method with Fuzzy Parameters
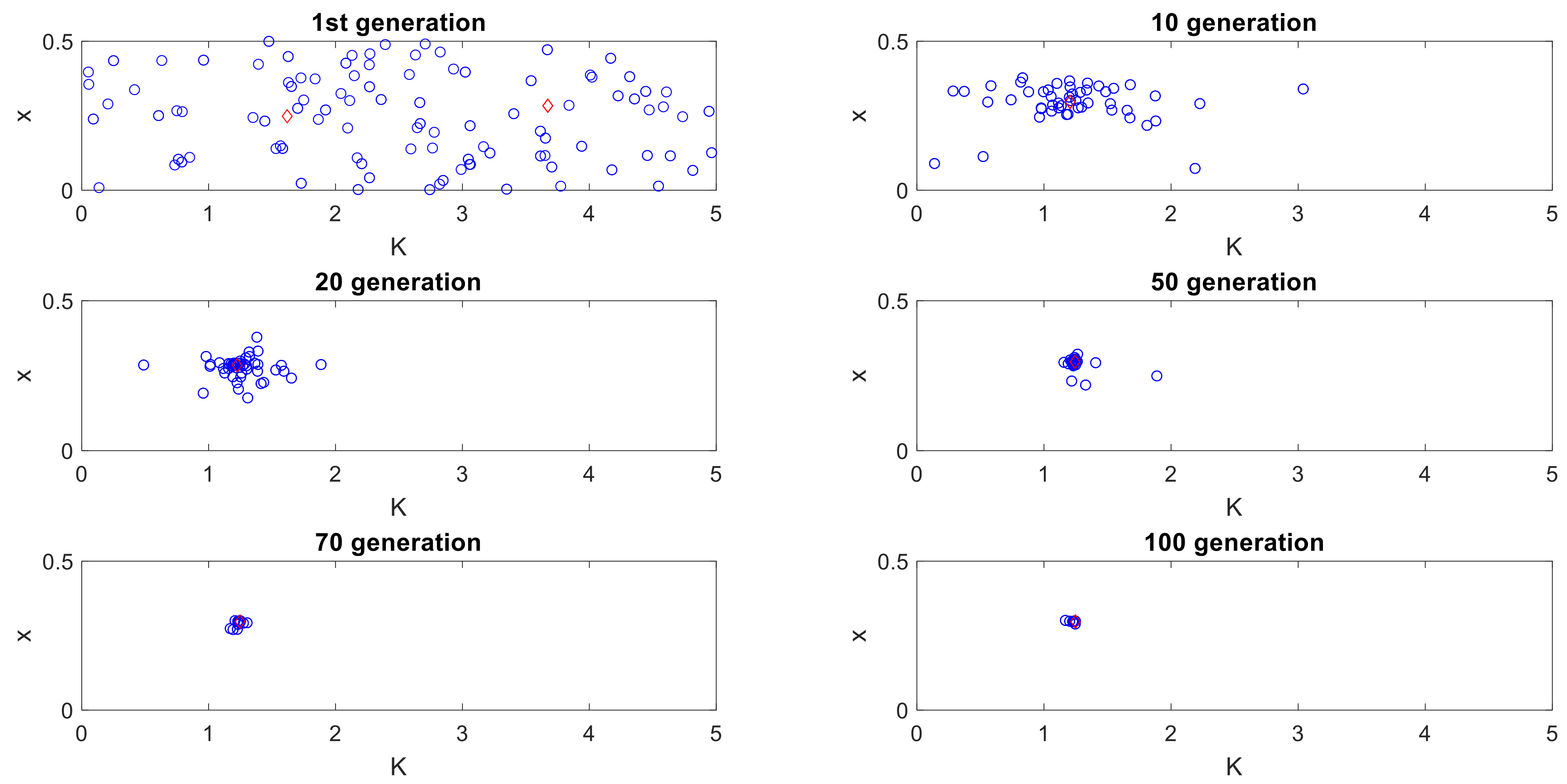
2.4. Particle Swarm Optimization Method
- 1:
- Initialize a population array of particles with random positions and velocities on D dimensions in the search area.
- 2:
- Loop
- 3:
- For each particle, evaluate the desired optimization fitness function in D variables.
- 4:
- Compare particle fitness evaluation with its best previously visited position (pi). If the current value is better than pi, then set pi equal to the current value.
- 5:
- Identify the particle with the best fitness function value of the swarm pg.
- 6:
- Change the velocity and position of the particle (xi) according to the Equation (18):
- 7:
- If a criterion is met (usually a sufficiently good fitness or a maximum number of iterations), exit loop.
- 8:
- End loop
3. Proposed Calibration and Performance Measures
4. Results and Discussion
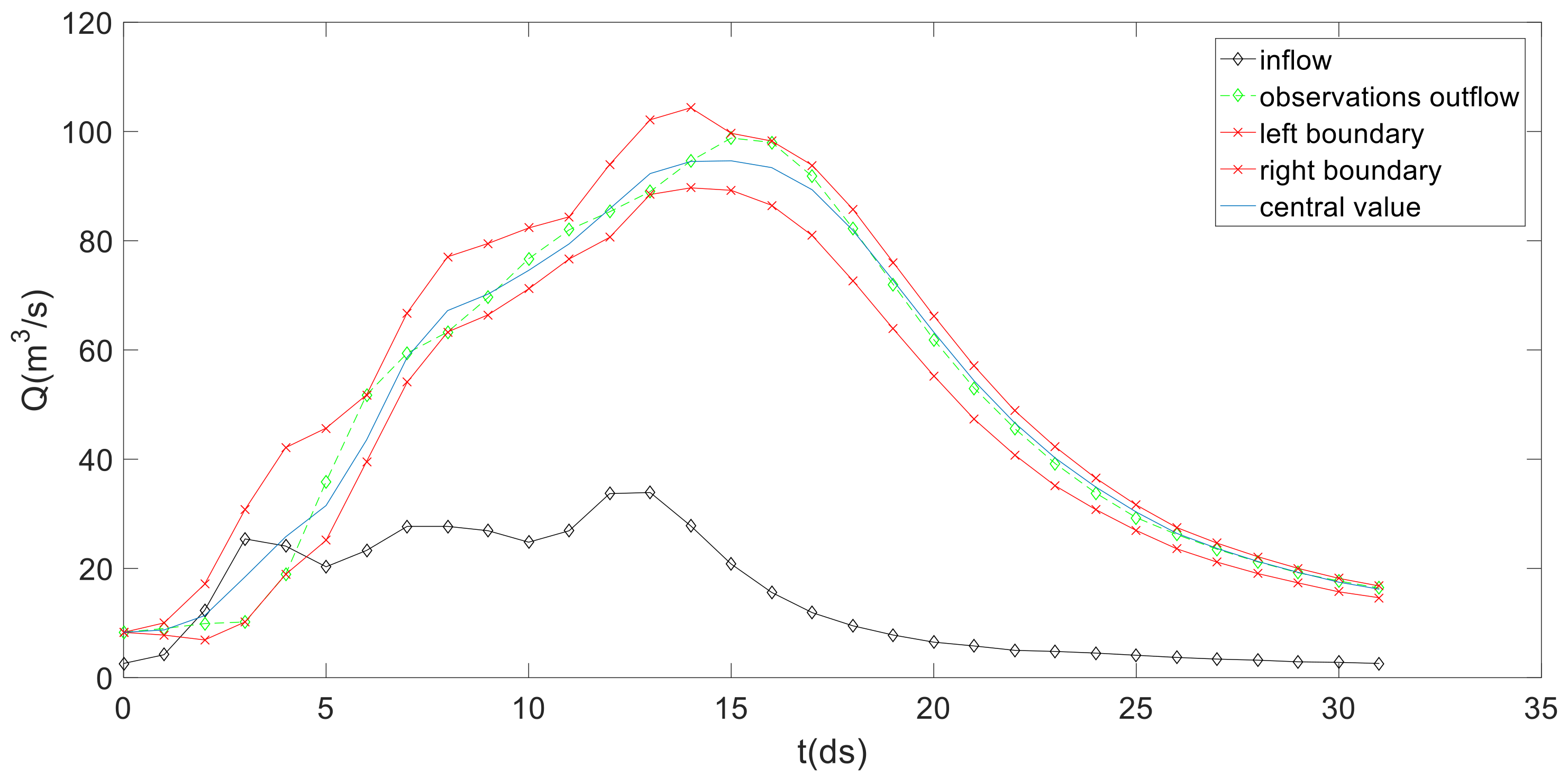
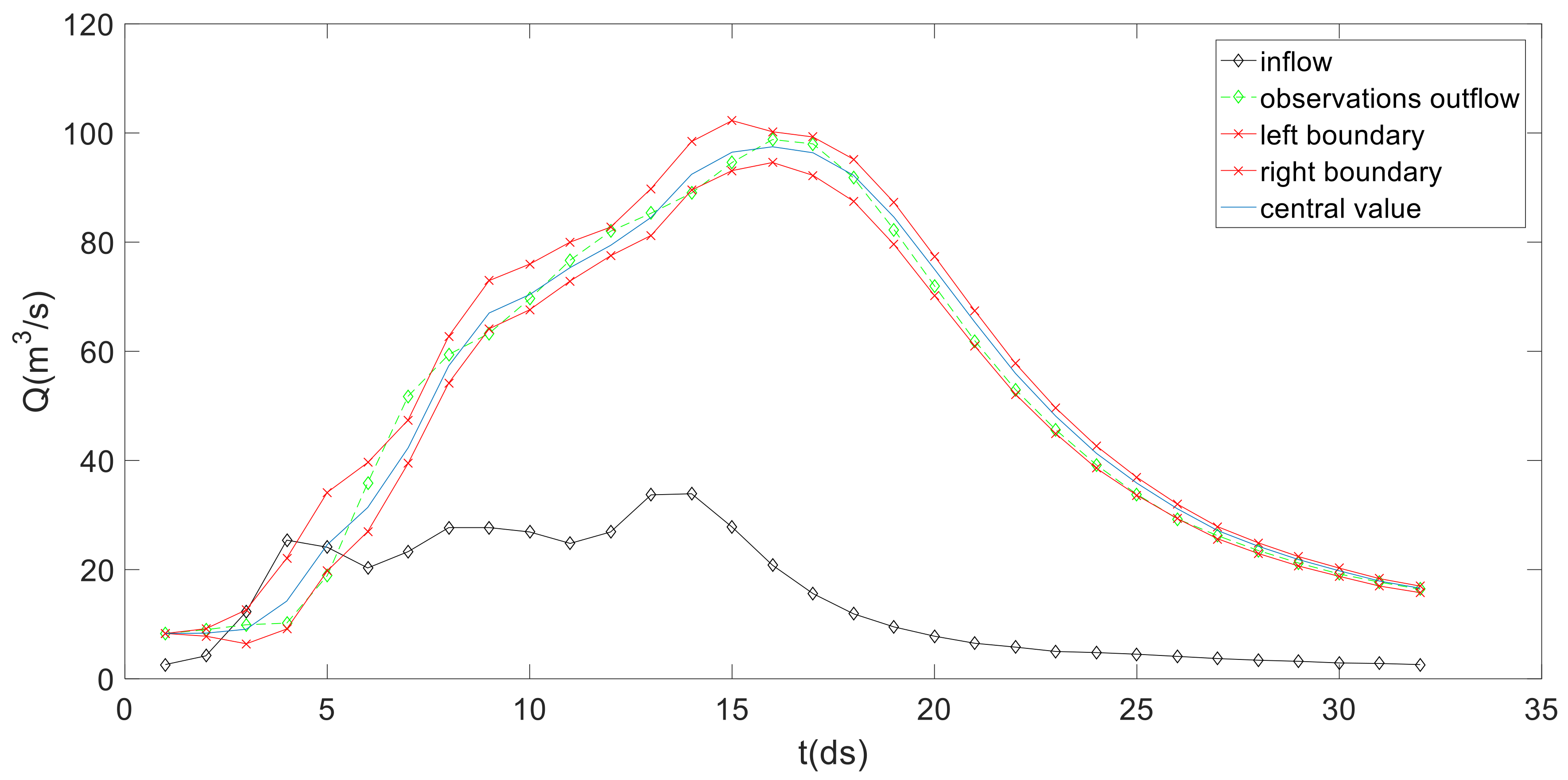
4.1. Smooth Hydrograph
4.2. Two-Peak Hydrograph
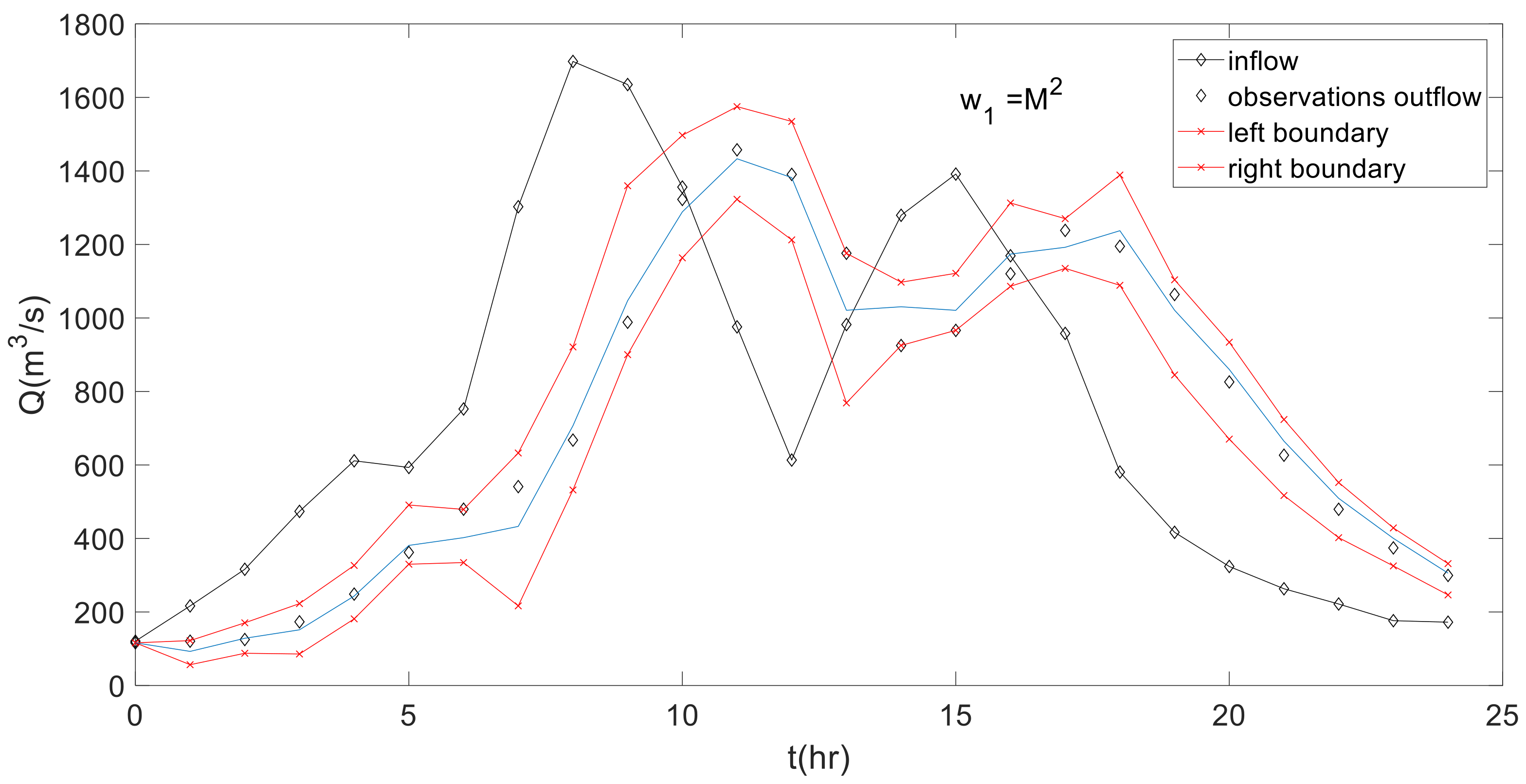
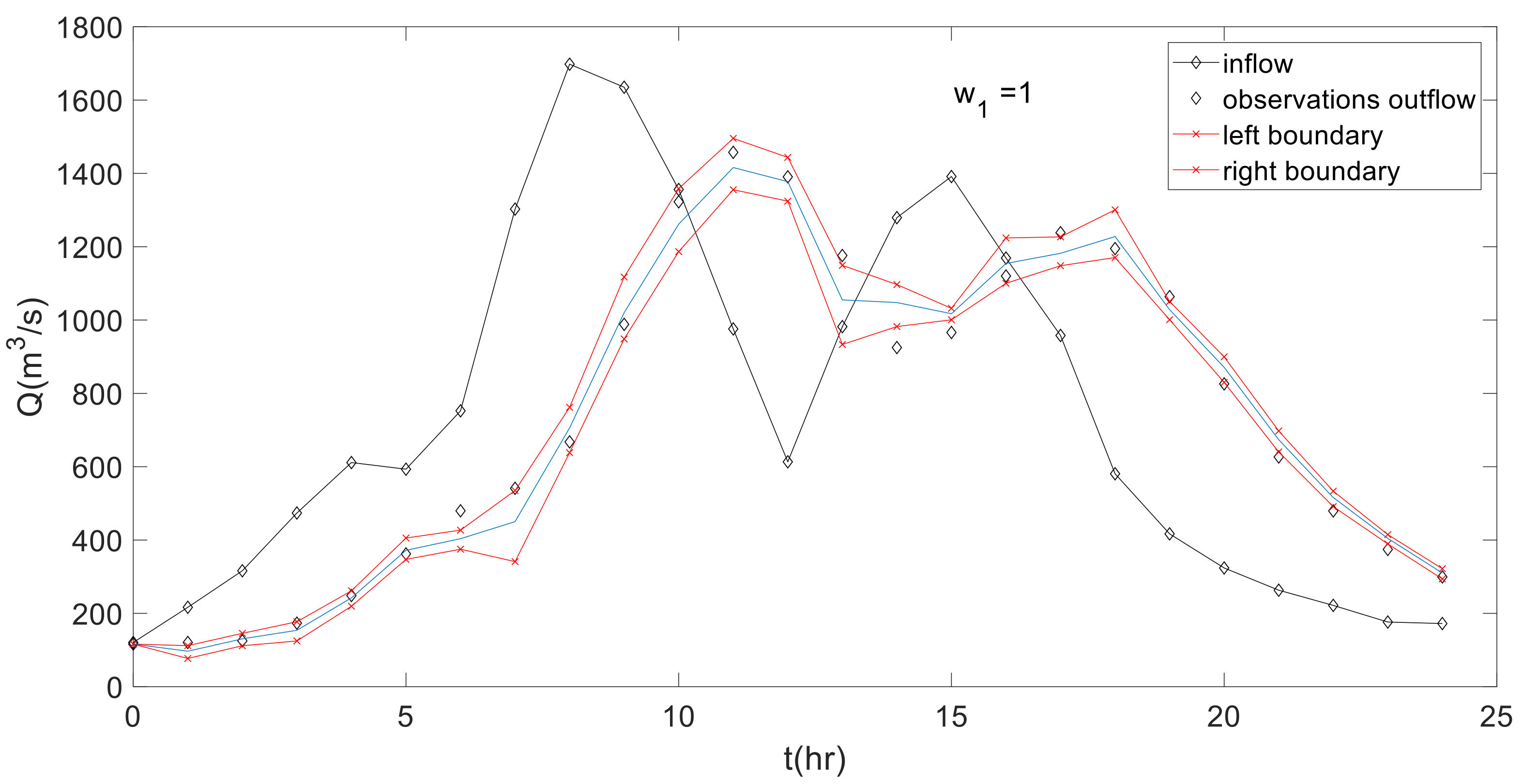
4.3. Non-Smooth Hydrograph with Lateral Flow
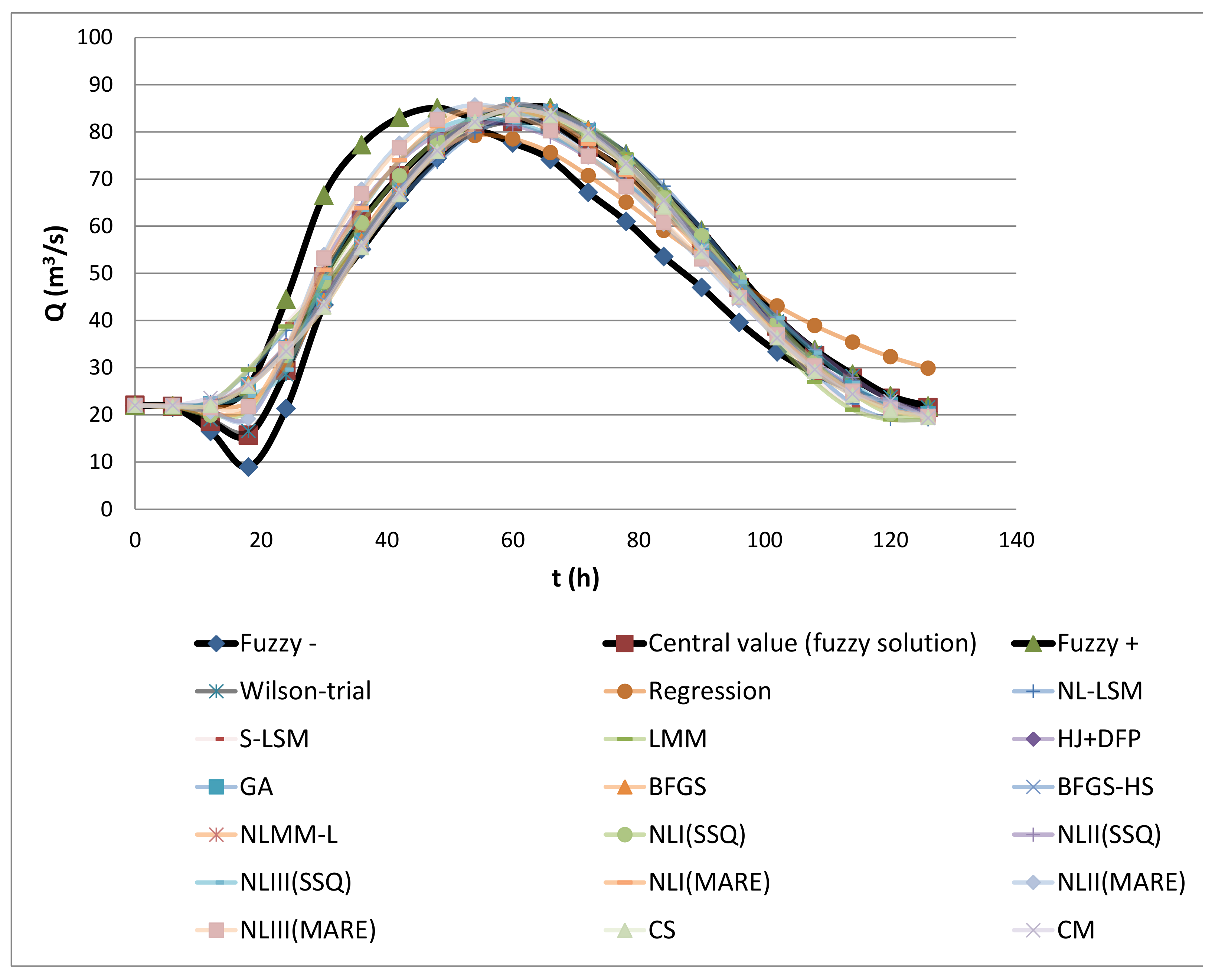
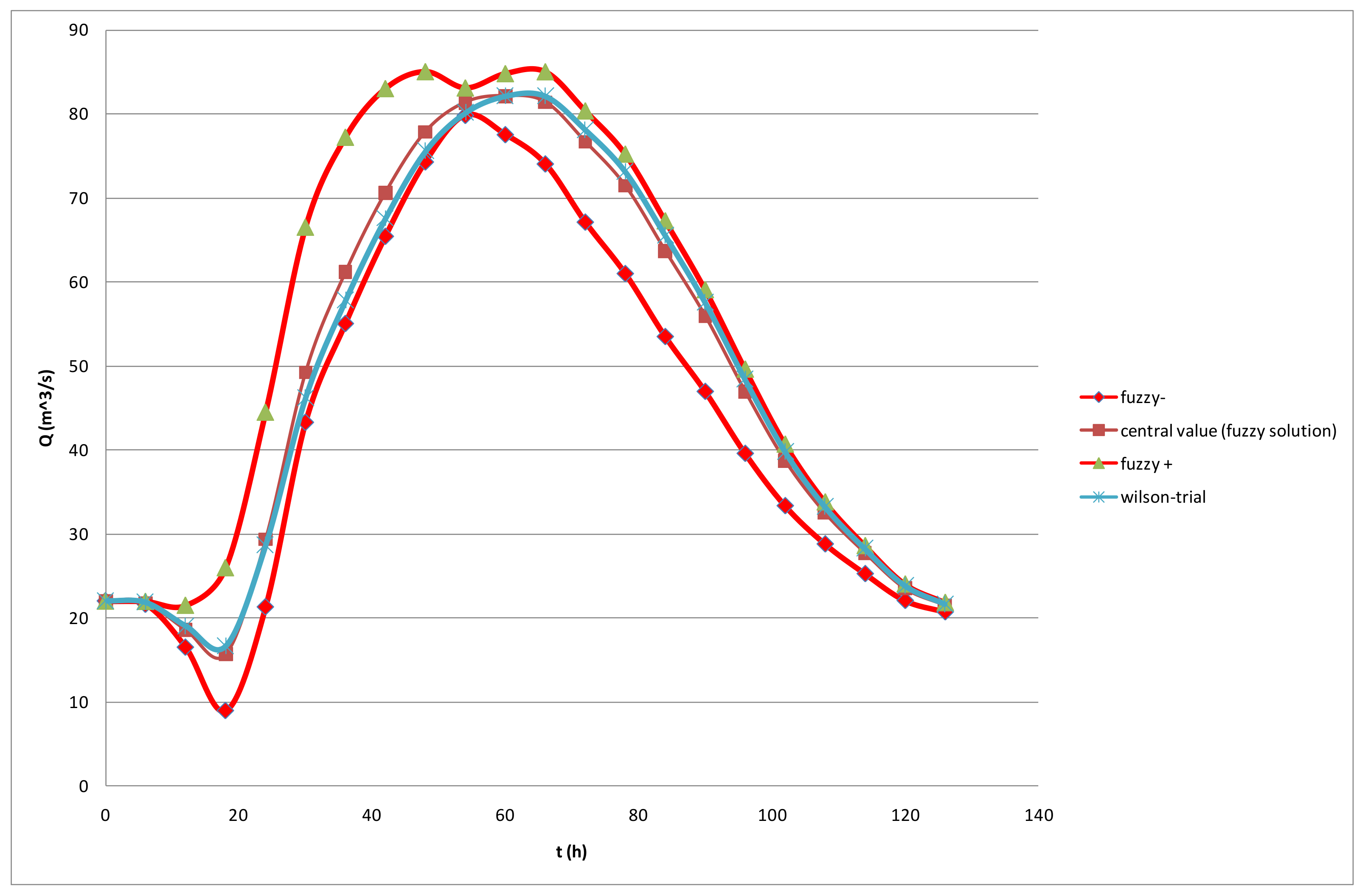
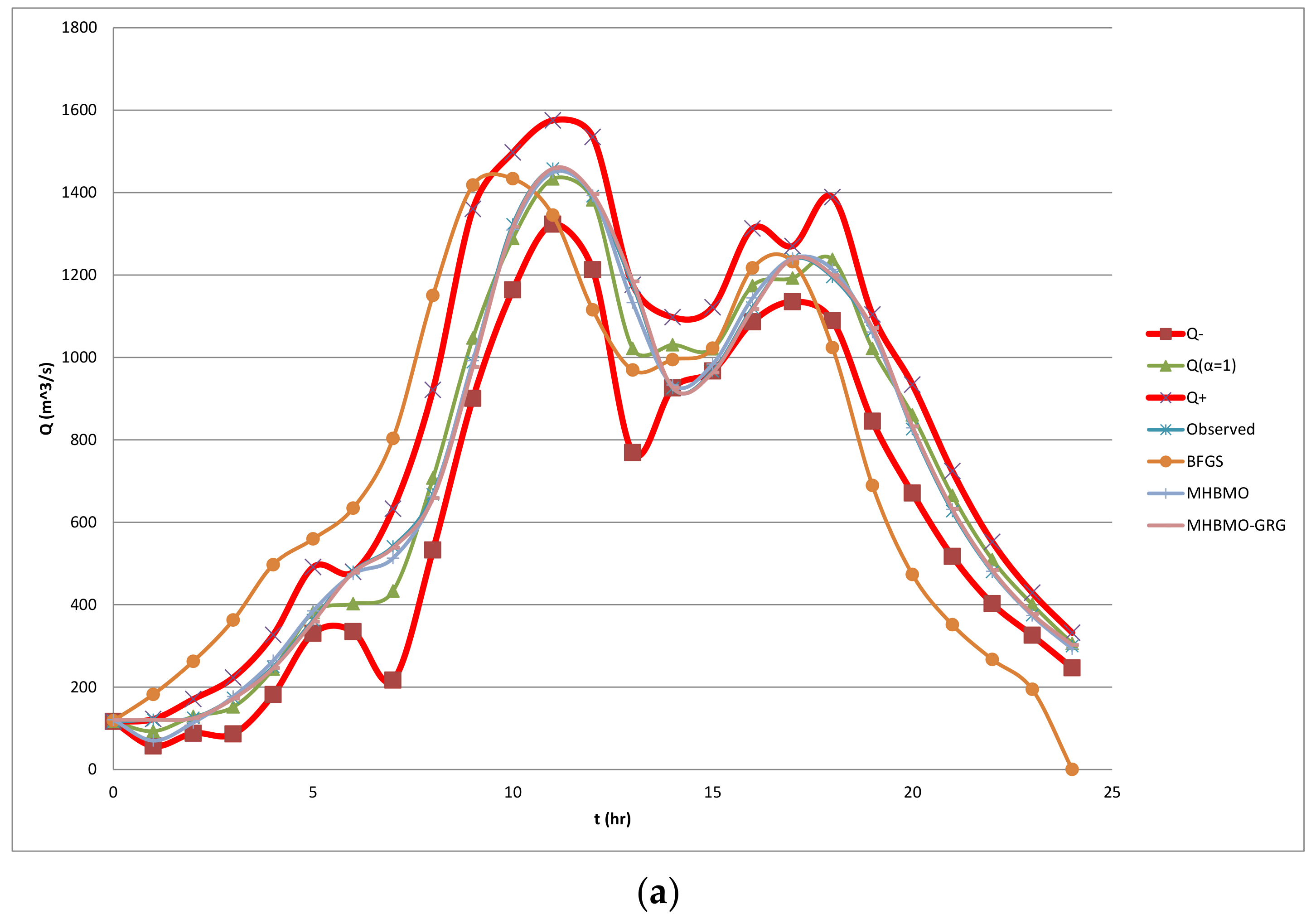
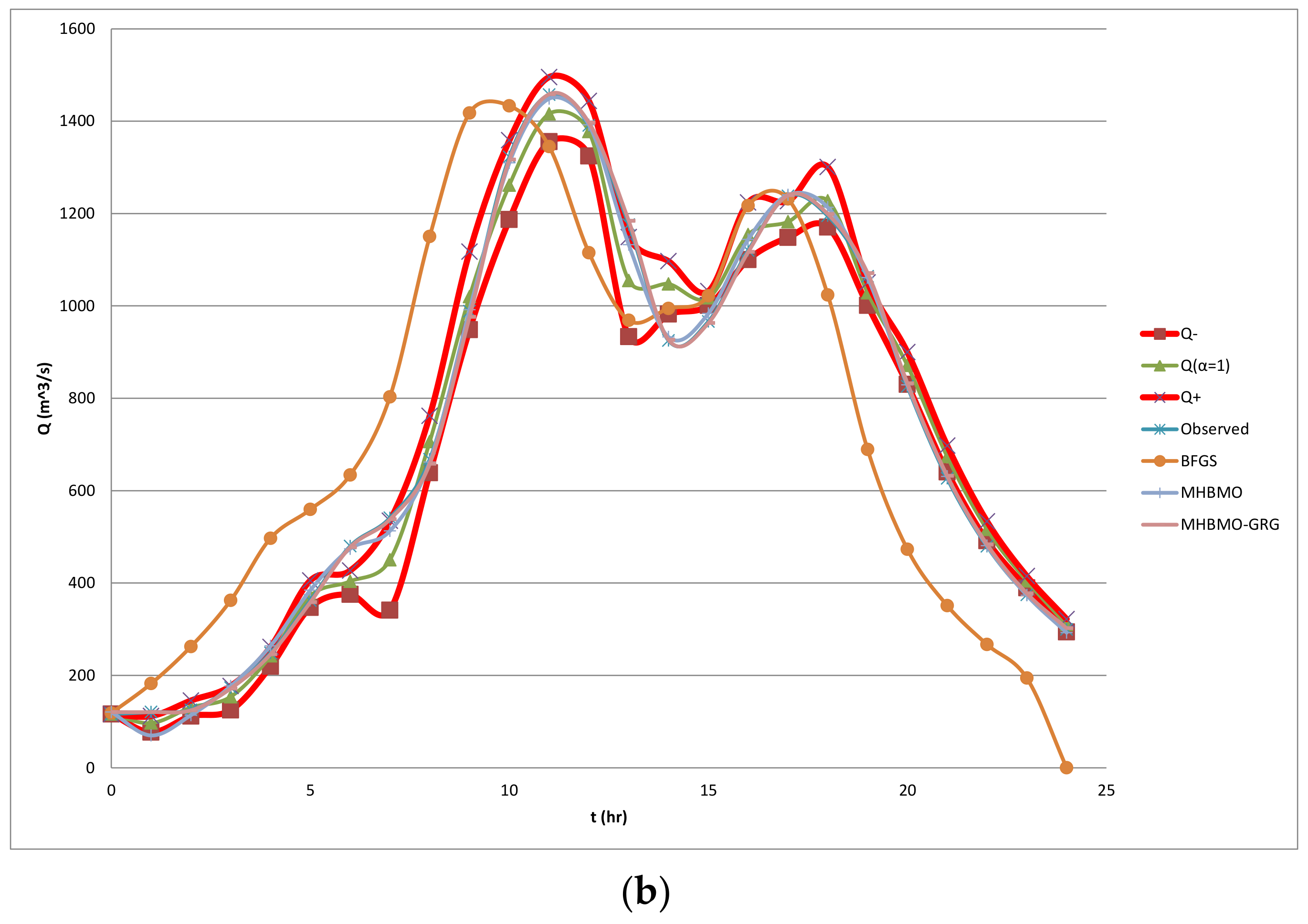
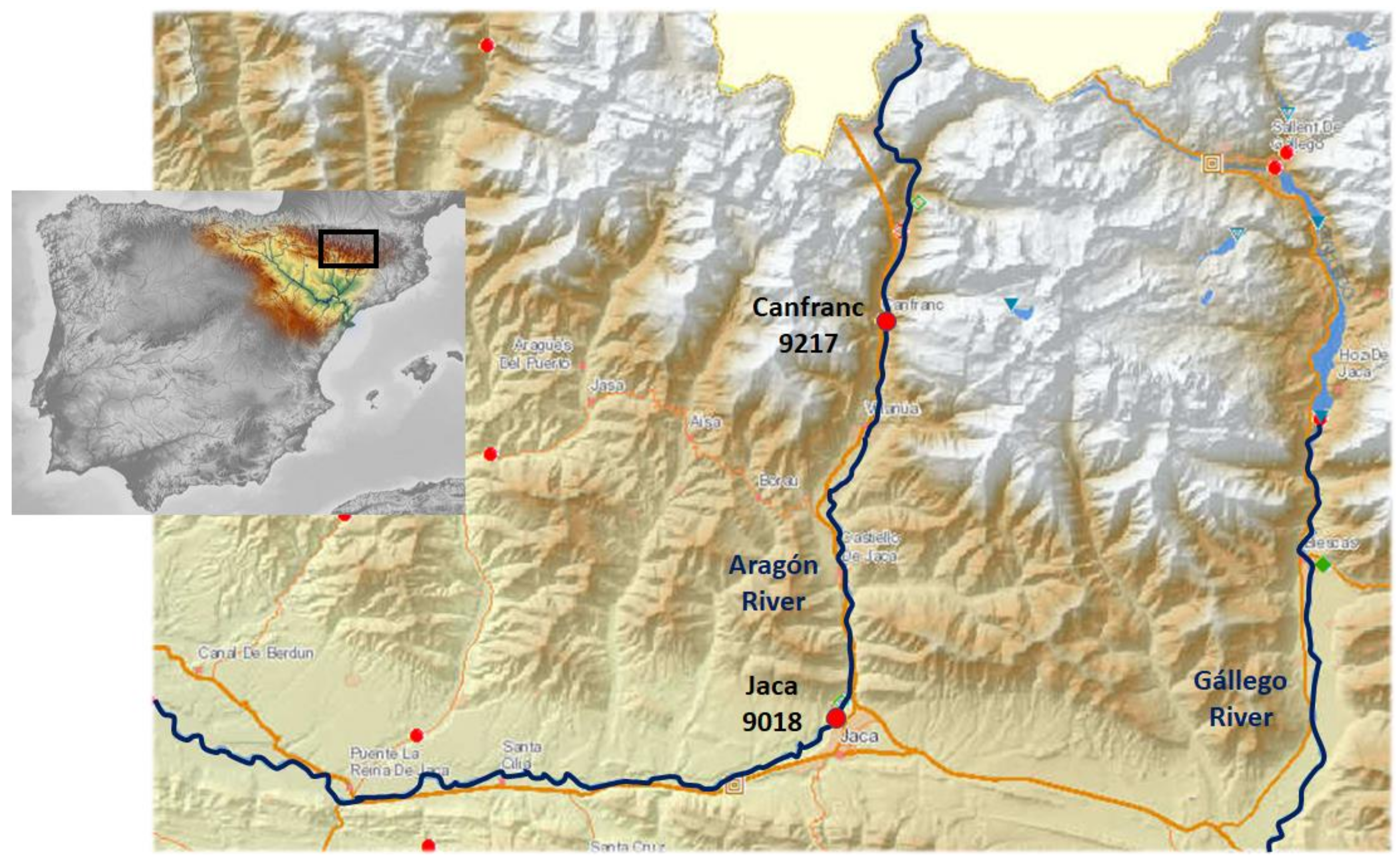
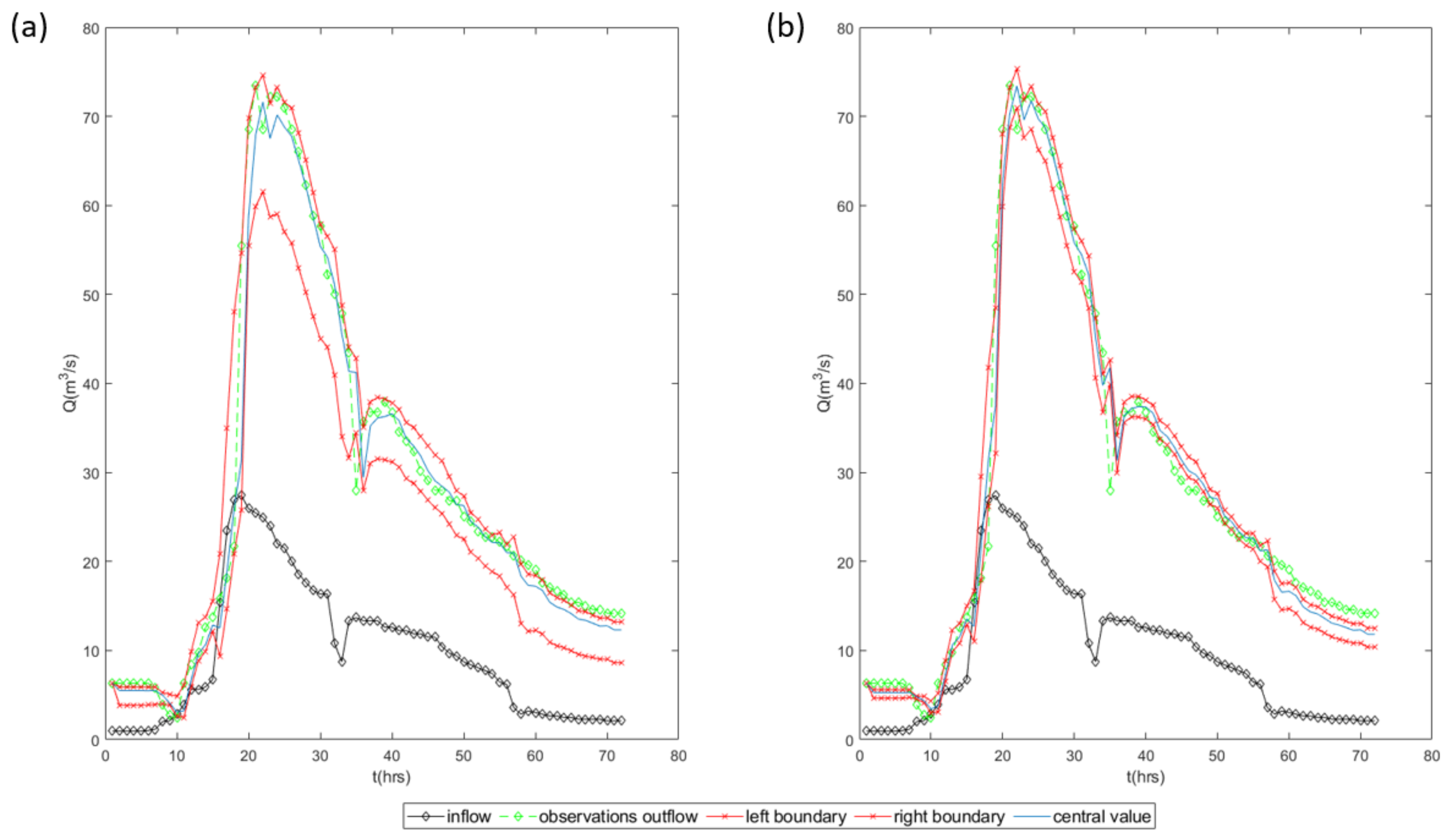
4.4. Validation with Real-Life Data
5. Concluding Remarks
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
References
- Baymani-Nezhad, M.; Han, D. Hydrological modeling using Effective Rainfall routed by the Muskingum method (ERM). J. Hydroinformatics 2013, 15, 1437–1455. [Google Scholar] [CrossRef]
- Niazkar, M.; Afzali, S.H. Streamline performance of Excel in stepwise implementation of numerical solutions. Comput. Appl. Eng. Educ. 2016, 24, 555–566. [Google Scholar] [CrossRef]
- McCarthy, G.T. The Unit Hydrograph and Flood Routing; Conf. of North Atlantic Division, U.S. Army Corps of Engineers, Engineer Department at New London: New London, CT, USA, 24 June 1938. [Google Scholar]
- Cunge, J.A. On the subject of a flood propagation computation method (Muskingum method). J. Hydraul. Res. 1969, 7, 205–230. [Google Scholar] [CrossRef]
- Ponce, V.M.; Yevjevich, V. Muskingum-Cunge Method with Variable Parameters. J. Hydraul. Div. 1978, 104, 1663–1667. [Google Scholar] [CrossRef]
- Ponce, V.; Lohani, A.; Scheyhing, C. Analytical verification of Muskingum-Cunge routing. J. Hydrol. 1996, 174, 235–241. [Google Scholar] [CrossRef]
- Das, A. Parameter Estimation for Muskingum Models. J. Irrig. Drain. Eng. 2004, 130, 140–147. [Google Scholar] [CrossRef]
- Akbari, G.H.; Barati, R. Comprehensive analysis of flooding in unmanaged catchments. Proc. Inst. Civil Eng. Water Manag. 2012, 165. [Google Scholar] [CrossRef]
- Viessman, J.; Lewis, G.L. Introduction to Hydrology; Pearson Education, Inc.: Upper Saddle River, NJ, USA, 2011. [Google Scholar]
- Wilson, E.M. Engineering Hydrology; Macmillan Education LTD: Hampshire, UK, 1974. [Google Scholar]
- O’Donnel, T. A direct three-parameter Muskingum procedure incorporating lateral inflow. Hydrol. Sci. J. 1985, 30, 479–496. [Google Scholar] [CrossRef] [Green Version]
- Spiliotis, M.; Sordo-Word, A.; Garrote, L. Estimation of the Muskingum Routing Coefficients Including Lateral inflow by using Fuzzy Linear Regression. In Proceedings of the 5th IAHR EUROPE CONGRESS, “New Challenges in Hydraulic Research and Engineering”, Trento, Italy, 12–14 June 2018; Armanini, A., Nucci, E., Eds.; The International Association for Hydro-Environment Engineering and Research: Beijing, China, 2018. [Google Scholar] [CrossRef]
- Gill, M.A. Flood routing by the Muskingum method. J. Hydrol. 1978, 36, 353–363. [Google Scholar] [CrossRef]
- Tung, Y.-K. River Flood Routing by Nonlinear Muskingum Method. J. Hydraul. Eng. 1985, 111, 1447–1460. [Google Scholar] [CrossRef] [Green Version]
- Yoon, J.; Padmanabhan, G. Parameter Estimation of Linear and Nonlinear Muskingum Models. J. Water Resour. Plan. Manag. 1993, 119, 600–610. [Google Scholar] [CrossRef]
- Geem, Z.W. Parameter Estimation for the Nonlinear Muskingum Model Using the BFGS Technique. J. Irrig. Drain. Eng. 2006, 132, 474–478. [Google Scholar] [CrossRef]
- Geem, Z.W. Parameter Estimation of the Nonlinear Muskingum Model using Parameter-Setting-Free Harmony Search Algorithm. J. Hydraul. Res. 2011, 16, 684–688. [Google Scholar]
- Karahan, H.; Gürarslan, G.; Geem, Z.W. A new nonlinear Muskingum flood routing model incorporating lateral flow. Eng. Optim. 2014, 47, 737–749. [Google Scholar] [CrossRef]
- Mohan, S. Parameter Estimation of Nonlinear Muskingum Models Using Genetic Algorithm. J. Hydraul. Eng. 1997, 123, 137–142. [Google Scholar] [CrossRef]
- Kim, J.H.; Geem, Z.W.; Kim, E.S. Parameter Estimation of the Nonlinear Muskingum Model Using Harmony Search. JAWRA J. Am. Water Resour. Assoc. 2001, 37, 1131–1138. [Google Scholar] [CrossRef]
- Chu, H.-J.; Chang, L.-C. Applying Particle Swarm Optimization to Parameter Estimation of the Nonlinear Muskingum Model. J. Hydrol. Eng. 2009, 14, 1024–1027. [Google Scholar] [CrossRef]
- Xu, D.-M.; Qiu, L.; Chen, S.-Y. Estimation of Nonlinear Muskingum Model Parameter Using Differential Evolution. J. Hydrol. Eng. 2012, 17, 348–353. [Google Scholar] [CrossRef]
- Geem, Z.W.; Roper, W.E. Various continuous harmony search algorithms for web-based hydrologic parameter optimisation. Int. J. Math. Model. Numer. Optim. 2010, 1, 213–226. [Google Scholar] [CrossRef]
- Niazkar, M.; Afzali, S.H. Assessment of Modified Honey Bee Mating Optimization for Parameter Estimation of Nonlinear Muskingum Models. J. Hydrol. Eng. 2015, 20, 04014055. [Google Scholar] [CrossRef]
- Niazkar, M.; Afzali, S.-H. Application of New Hybrid Optimization Technique for Parameter Estimation of New Improved Version of Muskingum Model. Water Resour. Manag. 2016, 30, 4713–4730. [Google Scholar] [CrossRef]
- Easa, S.M. Evaluation of nonlinear Muskingum model with continuous and discontinuous exponent parameters. KSCE J. Civ. Eng. 2015, 19, 2281–2290. [Google Scholar] [CrossRef]
- Farzin, S.; Singh, V.P.; Karami, H.; Farahani, N.; Ehteram, M.; Kisi, O.; Allawi, M.F.; Mohd, N.S.; El-Shafie, A. Flood Routing in River Reaches Using a Three-Parameter Muskingum Model Coupled with an Improved Bat Algorithm. Water 2018, 10, 1130. [Google Scholar] [CrossRef] [Green Version]
- Chu, H.-J. The Muskingum flood routing model using a neuro-fuzzy approach. KSCE J. Civ. Eng. 2009, 13, 371–376. [Google Scholar] [CrossRef]
- Spiliotis, M.; Garrote, L. Estimation of the Muskingum routing coefficients by using fuzzy regression. Eur. Water 2017, 57, 133–140. [Google Scholar]
- Tanaka, H. Fuzzy data analysis by possibilistic linear models. Fuzzy Sets Syst. 1987, 24, 363–375. [Google Scholar] [CrossRef]
- Klir, G.; Yuan, B. Fuzzy Sets and Fuzzy Logic Theory and its Applications; Prentice Hall: New York, NY, USA, 1995. [Google Scholar]
- Zimmermann, H.J. Fuzzy Set Theory and Its Applications; Springer Seience+Business Media: New York, NY, USA, 2001. [Google Scholar]
- Buckley, J.; Eslami, E. Introduction to Fuzzy Logic and Fuzzy Sets (Advances in Soft Computing); Springer: Berlin/Heidelberg, Germany, 2002; Volume 13. [Google Scholar]
- Buckley, J.; Eslami, E.; Feuring, T. Solving fuzzy equations. In Fuzzy Mathematics in Economics and Engineering; Buckley, J., Eslami, E., Feuring, T., Eds.; Springer: Berlin/Heidelberg, Germany, 2002; pp. 19–46. [Google Scholar]
- Hanss, M. Applied Fuzzy Arithmetic, an Introduction with Engineering Applications; Springer: Berlin, Germany, 2005. [Google Scholar]
- Spiliotis, M.; Angelidis, P.; Papadopoulos, B. A hybrid probabilistic bi-sector fuzzy regression based methodology for normal distributed hydrological variable. Evol. Syst. 2020, 11, 255–268. [Google Scholar] [CrossRef]
- Tsakiris, G.; Spiliotis, M. Embankment dam break: Uncertainty of outflow based on fuzzy representation of breach formation param eters. J. Intell. Fuzzy Syst. 2014, 27, 2365–2378. [Google Scholar] [CrossRef]
- Marsden, J.; Tromba, A. Vector Calculus, 5th ed.; W.H. Freeman and Company: New York, NY, USA, 2003. [Google Scholar]
- Parsopoulos, K.E.; Vrahatis, M.N. Recent approaches to global optimization problems through particle swarm optimization. Nat. Comput. 2002, 1, 235–306. [Google Scholar] [CrossRef]
- Spiliotis, M. A particle swarm optimization PSO heuristic for water distribution system analysis. Water Util. J. 2014, 8, 47–56. [Google Scholar]
- Spiliotis, M.; Mediero, L.; Garrote, L. Optimization of Hedging Rules for Reservoir Operation During Droughts Based on Particle Swarm Optimization. Water Resour. Manag. 2016, 30, 5759–5778. [Google Scholar] [CrossRef]
- Ostadrahimi, L.; Mariño, M.A.; Afshar, A. Multi-reservoir Operation Rules: Multi-swarm PSO-based Optimization Approach. Water Resour. Manag. 2011, 26, 407–427. [Google Scholar] [CrossRef]
- Papadopoulos, Κ.; Papagianni, C.; Gkonis, P.; Venieris, I.; Kaklamani, D. Particle Swarm Optimization of Antenna Arrays with Efficiency Constraints. Prog. Electromagn. Res. M 2011, 17, 237–251. [Google Scholar] [CrossRef] [Green Version]
- Spiliotis, M.; Garrote, L. Unit hydrograph identification based on fuzzy regression analysis. Evol. Syst. 2021, 1–22. [Google Scholar] [CrossRef]
- Eberhart, R.C.; Kennedy, J. A new optimizer using particle swarm theory. In Proceedings of the Sixth Symposium on Micro Machine and Human Science, Nagoya, Japan, 4–6 October 1995; pp. 39–43. [Google Scholar] [CrossRef]
- Poli, P.; Keenedy, J.; Blackwell, T. Particle swarm optimization. Swarm Intell. 2007, 1, 33–57. [Google Scholar] [CrossRef]
- Shi, Y.; Eberhart, R. A modified particle swarm optimizer. In Proceedings of the 1998 IEEE International Conference on Evolutionary Computation Proceedings, Anchorage, AK, USA, 4–9 May 1998; pp. 69–73. [Google Scholar]
- Clerc, M.; Kennedy, J. The particle swarm—Explosion, stability, and convergence in a multidimensional complex space. IEEE Trans. Evol. Comput. 2002, 6, 58–73. [Google Scholar] [CrossRef] [Green Version]
- Salehizadeh, S.; Yadmellat, P.; Menhaj, M. Local Optima Avoidable Particle Swarm Optimization. In Proceedings of the IEEE Swarm Intelligence Symposium, Nashville, TN, USA, 30 March–2 April 2009; pp. 16–21. [Google Scholar]
- Ishibuchi, H.; Tanaka, H.; Okada, H. An architecture of neural networks with interval weights and its application to fuzzy regression analysis. Fuzzy Sets Syst. 1993, 57, 27–39. [Google Scholar] [CrossRef]
- Spiliotis, M.; Hrissanthou, V. Fuzzy and crisp regression analysis between sediment transport rates and stream discharge in the case of two basins in northeastern Greece. In Conventional and Fuzzy Regression: Theory and Engineering Applications; Hrissanthou, V., Spiliotis, M., Eds.; Nova Science Publishers: New York, NY, USA, 2018; pp. 1–46. [Google Scholar]
- Tzimopoulos, C.; Papadopoulos, K.; Papadopoulos, B. Fuzzy Regression with Applications in Hydrology. Int. J. Eng. Innov. Technol. 2016, 5, 22. [Google Scholar]
- Karahan, H.; Gürarslan, G.; Geem, Z.W. Parameter Estimation of the Nonlinear Muskingum Flood-Routing Model Using a Hybrid Harmony Search Algorithm. J. Hydrol. Eng. 2013, 18, 352–360. [Google Scholar] [CrossRef]
- Karahan, H. Discussion of “Improved Nonlinear Muskingum Model with Variable Exponent Parameter” by Said M. Easa. J. Hydrol. Eng. 2014, 19, 07014007. [Google Scholar] [CrossRef]
- Pedersen, M.; Chipperfield, A. Simplifying Particle Swarm Optimization. Appl. Soft Comput. 2010, 10, 618–628. [Google Scholar] [CrossRef]
- Easa, S.M. Improved nonlinear Muskingum model with variable exponent parameter. J. Hydrol. Eng. 2013, 18, 1790–1794. [Google Scholar] [CrossRef]
- Yang, X.-S. Nature-inspired optimization algorithms: Challenges and open problems. J. Comput. Sci. 2020, 46, 101104. [Google Scholar] [CrossRef] [Green Version]
- Ouyang, A.; Tang, Z.; Li, K.; Sallam, A.; Sha, E. Estimating Parameters of Muskingum Model Using an Adaptive Hybrid pso Algorithm. Int. J. Pattern Recognit. Artif. Intell. 2014, 28, 1459003. [Google Scholar] [CrossRef]
- Norouzi, H.; Bazargan, J. Flood routing by linear Muskingum method using two basic floods data using particle swarm optimization (PSO) algorithm. Water Supply 2020, 20, 1897–1908. [Google Scholar] [CrossRef]
- Moghaddam, A.; Behmanesh, J.; Farsijani, A. Parameters Estimation for the New Four-Parameter Nonlinear Muskingum Model Using the Particle Swarm Optimization. Water Resour. Manag. 2016, 30, 2143–2160. [Google Scholar] [CrossRef]
- Sudibyo, S.; Murat, M.N.; Aziz, N. Simulated annealing-Particle Swarm Optimization (SA-PSO): Particle distribution study and application in Neural Wiener-based NMPC. In Proceedings of the 2015 10th Asian Control Conference (ASCC), Kota Kinabalu, Malaysia, 31 May–3 June 2015; pp. 1–6. [Google Scholar]
- Rubio, F.; Rodríguez, I. Water-Based Metaheuristics: How Water Dynamics Can Help Us to Solve NP-Hard Problems. Complexity 2019, 2019, 1–13. [Google Scholar] [CrossRef]
- Clark, D. (Ed.) Kaboli, HRA Rain-Fall Inspired Optimization Algorithm For Optimal Load Dispatch In Power System. In Robust and Constrained Optimization: Methods and Applications; Nova Science Publishers: New York, NY, USA, 2020. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Time (Hours) | ||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Models | 0 | 6 | 12 | 18 | 24 | 30 | 36 | 42 | 48 | 54 | 60 | 66 | 72 | 78 | 84 | 90 | 96 | 102 | 108 | 114 | 120 | 126 |
| Wilson-trial | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P |
| Regression | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F | F | F | F | F |
| NL-LSM | P | P | F | F | P | P | P | P | P | P | P | P | P | P | F | P | P | P | P | F | F | F |
| S-LSM | P | P | F | F | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F | F | F | F |
| LMM | P | P | F | F | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F | F | F | F |
| HJ+DFP | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P |
| GA | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P |
| BFGS | P | P | P | P | P | P | P | P | P | P | F | P | P | P | P | P | P | P | P | P | P | P |
| BFGS-HS | P | P | P | P | P | P | P | P | P | P | F | P | P | P | P | P | P | P | P | P | P | P |
| NLMM-L | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F | F | F |
| NLI (SSQ) | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F | F |
| NLII (SSQ) | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P |
| NLIII (SSQ) | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | P | F |
| NLI (MARE) | P | P | P | P | P | P | P | P | P | F | P | P | P | P | P | P | P | P | P | P | P | P |
| NLII (MARE) | P | P | P | P | P | P | P | P | P | F | P | P | P | P | P | P | P | P | P | P | P | P |
| NLIII (MARE) | P | P | P | P | P | P | P | P | P | F | P | P | P | P | P | P | P | P | P | P | P | F |
| Training | Validation | |||
|---|---|---|---|---|
| Hydrograph 1 | Hydrograph 2 | Hydrograph 3 | Hydrograph 4 | |
| w1 = 0.1 | ||||
| E1 | 3.8382 | 6.8537 | 10.8548 | 4.8134 |
| E3 | 18.8438 | 24.9167 | 41.3546 | 20.9019 |
| w1 = 1 | ||||
| E1 | 0.7458 | 0.6556 | 1.1253 | 0.4815 |
| E3 | 84.5021 | 79.5274 | 144.0766 | 75.1660 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Spiliotis, M.; Sordo-Ward, A.; Garrote, L. Estimation of Fuzzy Parameters in the Linear Muskingum Model with the Aid of Particle Swarm Optimization. Sustainability 2021, 13, 7152. https://doi.org/10.3390/su13137152
Spiliotis M, Sordo-Ward A, Garrote L. Estimation of Fuzzy Parameters in the Linear Muskingum Model with the Aid of Particle Swarm Optimization. Sustainability. 2021; 13(13):7152. https://doi.org/10.3390/su13137152
Chicago/Turabian StyleSpiliotis, Mike, Alvaro Sordo-Ward, and Luis Garrote. 2021. "Estimation of Fuzzy Parameters in the Linear Muskingum Model with the Aid of Particle Swarm Optimization" Sustainability 13, no. 13: 7152. https://doi.org/10.3390/su13137152