
Improved Kalman-Filter-Based Model-Predictive Control Method for Trajectory Tracking of Automatic Straddle Carriers
Abstract
:1. Introduction
- (1)
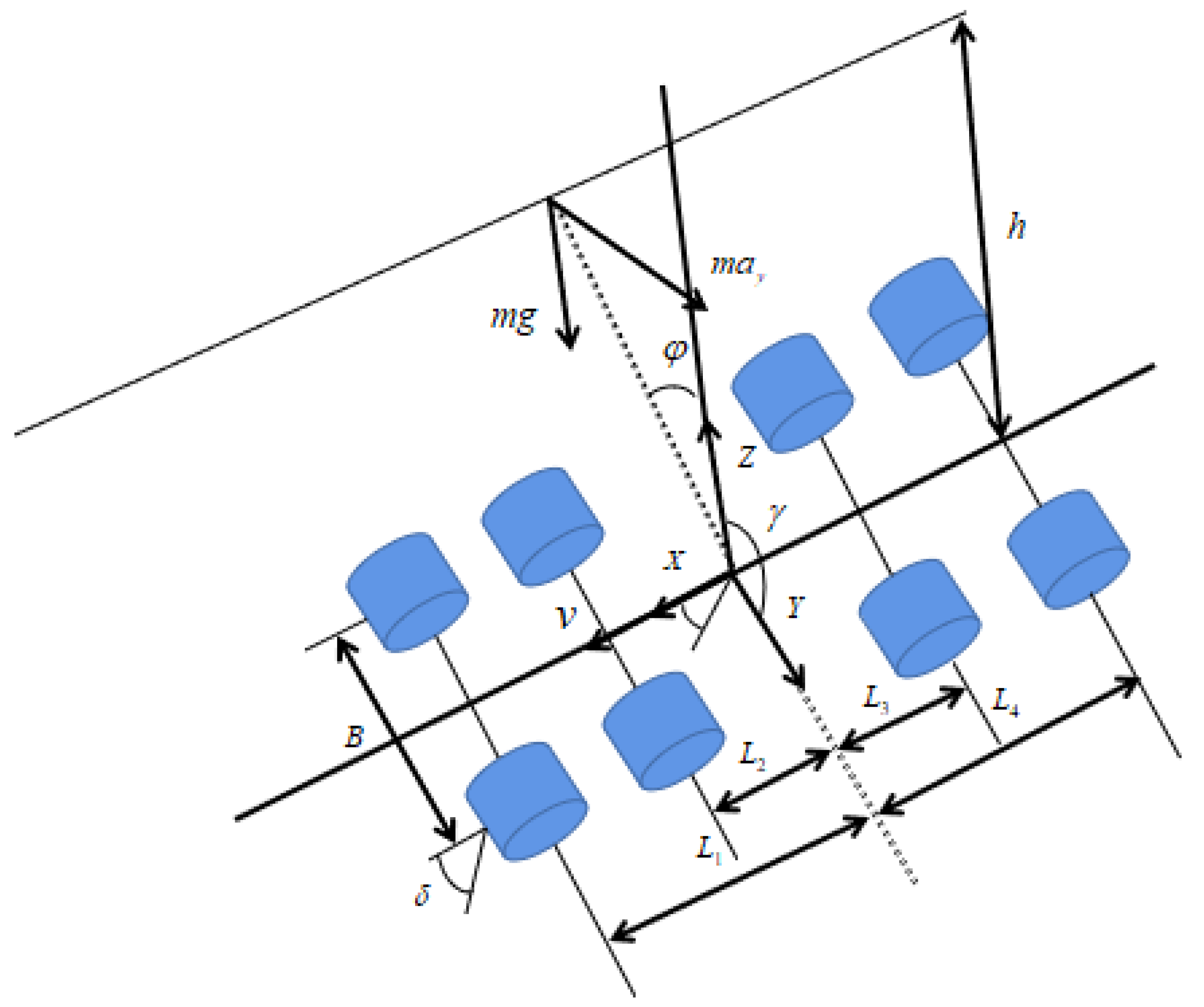
- Considering the structural characteristics of the ASC, the steering and dynamics of the ASC are analyzed and the mathematical model is established according to Newton’s second law of motion and D’Alembert’s principle.
- (2)
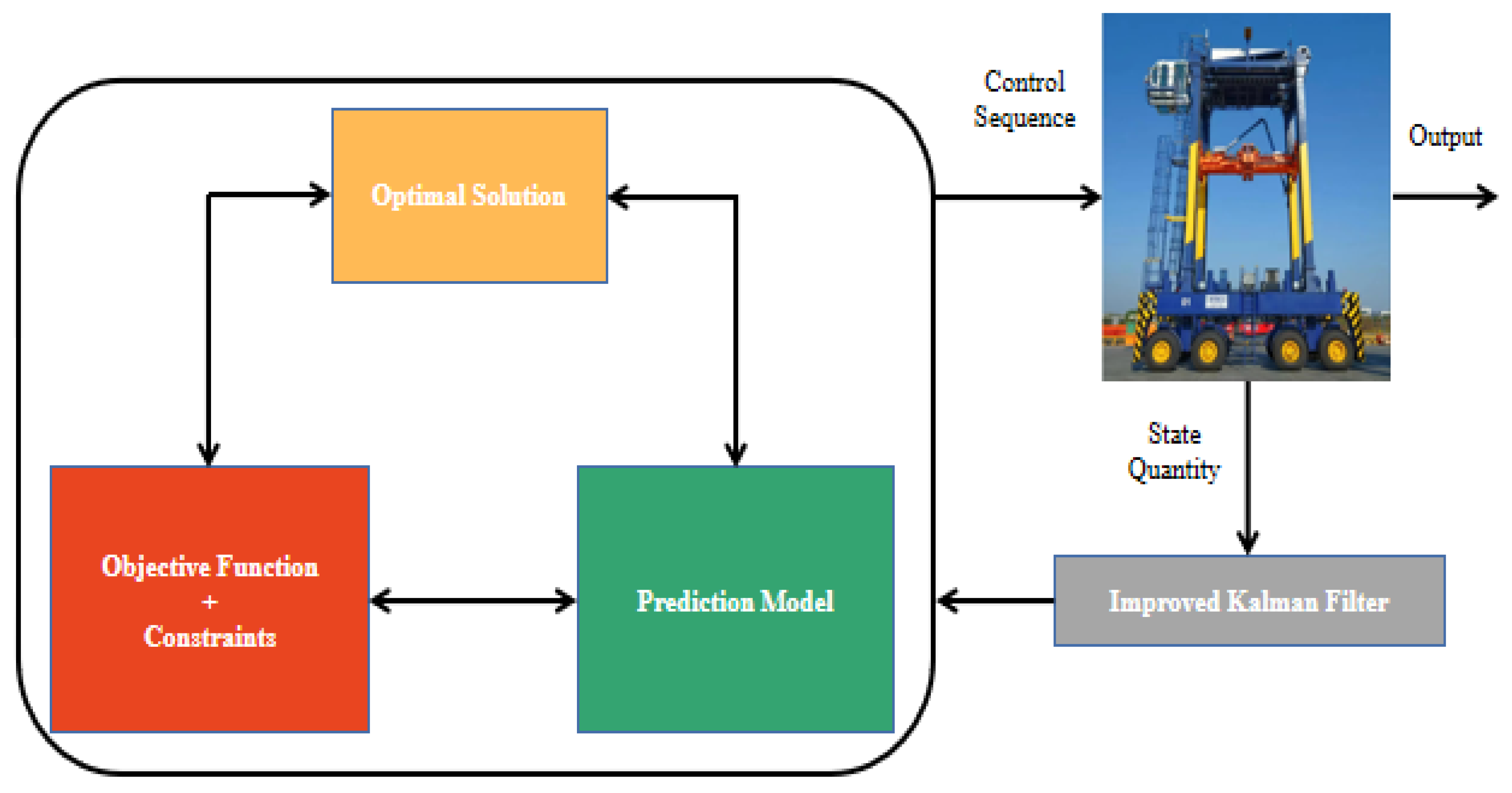
- An improved dynamic Kalman filter algorithm is proposed to compensate for the process and measurement noise and to provide the system state estimation for the considered ASC.
- (3)
- Considering the anti-overturning constraint, the objective function is optimized and the iKFMPC algorithm is designed to ensure smooth operation of the ASC and accurate trajectory tracking.
2. Problem Formulation
3. Design of the Improved Kalman Filter
4. Design of iKFMPC
- (1)
- Considering the system’s ability to follow the desired path of the ASC, the cost function is set, where is the desired path;
- (2)
- Considering the constraints on the control increment of the system, the cost function is set;
- (3)
- Considering the optimal travel distance of the automatic straddle carrier, the cost function is set;
- (4)
- Considering the constraints on the sideslip angle of the automatic straddle carrier, the cost function is set;
- (5)
- Considering the tilt angle constraint, the cost function is set.
5. Simulation Experiments
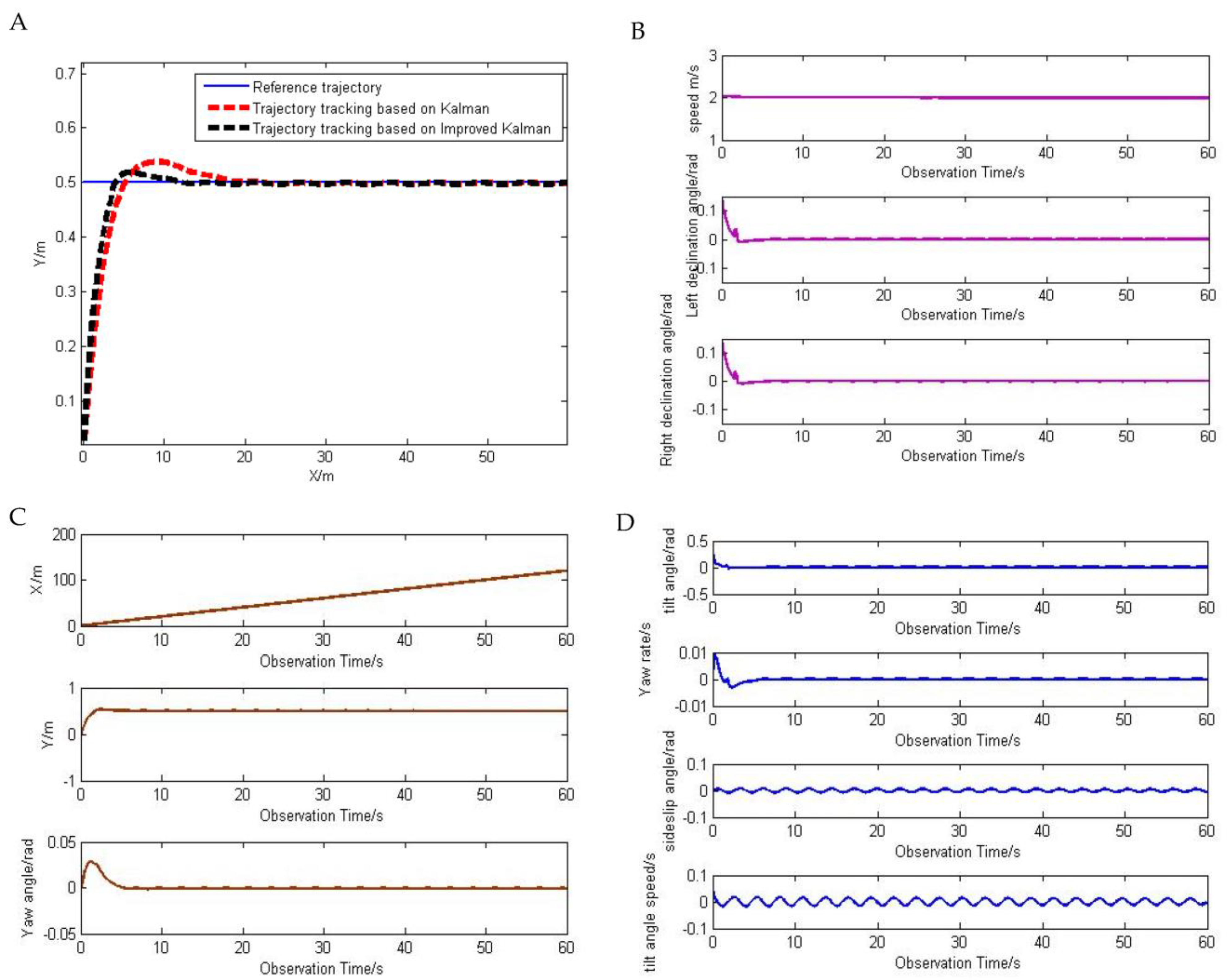
5.1. Linear Motion
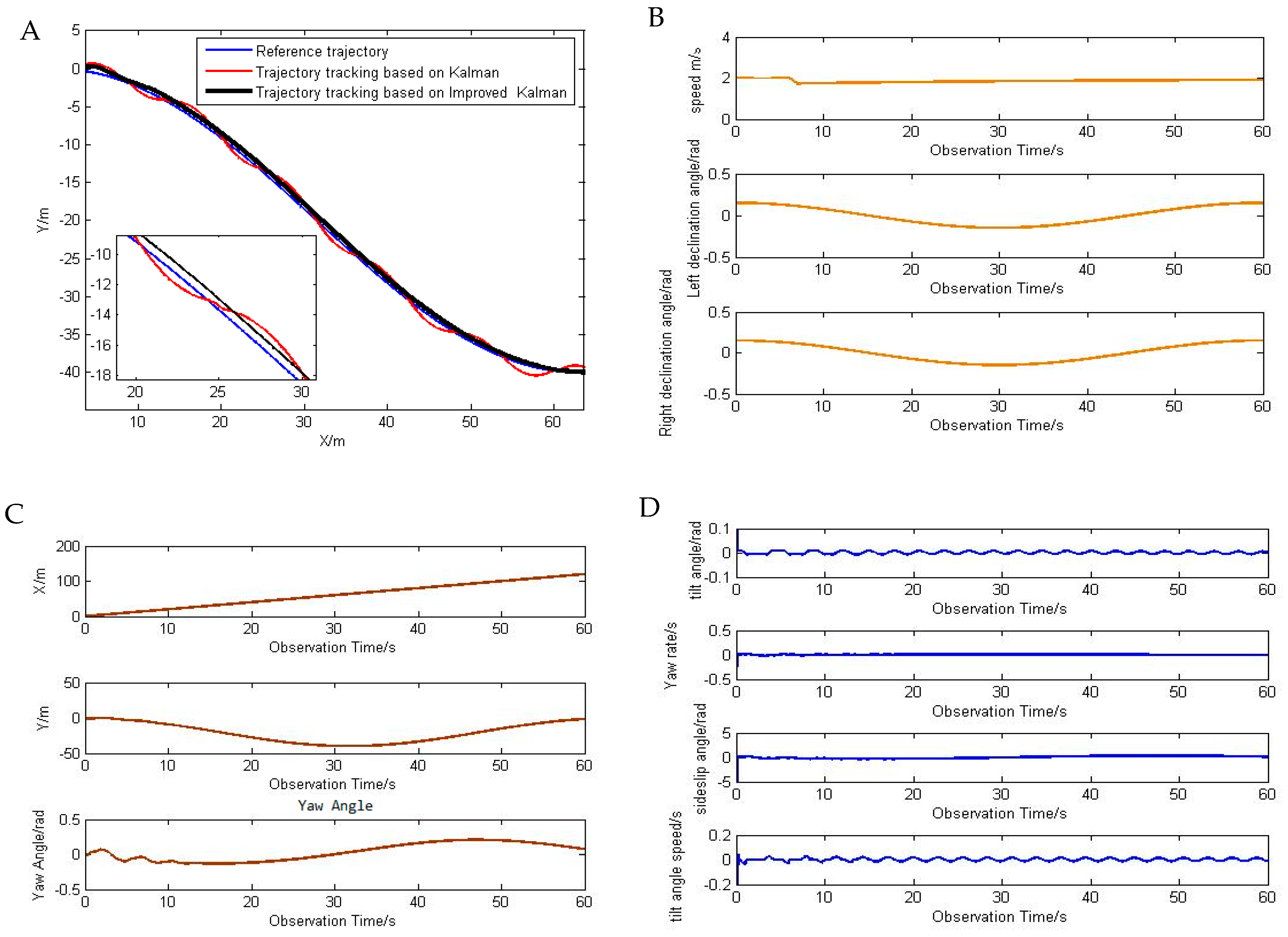
5.2. Curvilinear Motion
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wong, A.; Kozan, E. Optimising container process at multimodal container terminal with automatic straddle carriers. In Proceedings of the 35th International Conference on Computers and Industrial Engineering, Istanbul, Turkey, 19–22 June 2005; pp. 2053–2058. [Google Scholar]
- Cai, B.; Huang, S.; Liu, D.; Yuan, S.; Dissanayake, G.; Lau, H.; Pagac, D. Optimisation model and exact algorithm for autonomous straddle carrier scheduling at automated container terminals. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 3686–3693. [Google Scholar]
- Yuan, S.; Skinner, B.T.; Huang, S.; Liu, D.K.; Dissanayake, G.; Lau, H.; Pagac, D.; Pratley, T. Mathematical modelling of container transfers for a fleet of autonomous straddle carriers. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, Alaska, 3–8 May 2010; pp. 1261–1266. [Google Scholar]
- Ge, Y.; Zhang, Q.; Chen, X.; Zhili, W. Research on the Steering Stability of Autonomous Straddle Carrier. In Proceedings of the 2019 International Conference on Advances in Construction Machinery and Vehicle Engineering (ICACMVE), Changsha, China, 14–16 May 2019; pp. 62–66. [Google Scholar]
- Anvari, B.; Ziakopoulos, A.; Morley, J.; Pachakis, D.; Angeloudis, P. Comparison of Fleet Size Determination Models for Horizontal Transportation of Shipping Containers Using Automated Straddle Carriers. Handb. Termin. Plan. 2020, 73–100. [Google Scholar]
- Huang, J.Z.; Cen, Y.W. A Path-Planning Algorithm for AGV Based on the Combination between Ant Colony Algorithm and Immune Regulation. Adv. Mater. Res. 2011, 422, 3–9. [Google Scholar] [CrossRef]
- Bui, T.L.; Doan, P.T.; Kim, H.K.; Kim, S.B. Trajectory tracking controller design for AGV using laser sensor based positioning system. In Proceedings of the 2013 9th Asian Control Conference (ASCC), Istanbul, Turkey, 23–26 June 2013; pp. 1–5. [Google Scholar]
- Setiawan, Y.D.; Nguyen, T.H.; Pratama, P.S.; Kim, H.K.; Kim, S.B. Path tracking controller design of four wheel independent steering automatic guided vehicle. Int. J. Control. Autom. Syst. 2016, 14, 1550–1560. [Google Scholar] [CrossRef]
- Hang, P.; Chen, X. Path tracking control of 4-wheel-steering autonomous ground vehicles based on linear parameter-varying system with experimental verification. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2021, 235, 411–423. [Google Scholar]
- Asif, M.; Arshad, M.R.; Wilson, P.A. AGV guidance system: An application of simple active contour for visual tracking. Int. J. Comput. Inf. Eng. 2007, 1, 1756–1759. [Google Scholar]
- Liu, Y.; Fomel, S.; Liu, G. Nonlinear structure-enhancing filtering using plane-wave prediction. Geophys. Prospect. 2010, 58, 415–427. [Google Scholar] [CrossRef]
- Shapiro, R. Linear filtering. Math. Comput. 1975, 29, 1094–1097. [Google Scholar] [CrossRef]
- Ahmad, M.; Polotski, V.; Hurteau, R. Path tracking control of tracked vehicles. In 2000 ICRA. Millennium Conference, Proceedings of the IEEE International Conference on Robotics and Automation, San Francisco, CA, USA, 24–28 April 2000; IEEE: Piscataway, NJ, USA, 2000; Volume 3, pp. 2938–2943. [Google Scholar]
- Ye, D.; Yang, G.H. Adaptive fault-tolerant tracking control against actuator faults with application to flight control. IEEE Trans. Control. Syst. Technol. 2006, 14, 1088–1096. [Google Scholar] [CrossRef]
- Farag, W. Complex trajectory tracking using PID control for autonomous driving. Int. J. Intell. Transp. Syst. Res. 2020, 18, 356–366. [Google Scholar] [CrossRef]
- Yuan, J.; Sun, F.; Huang, Y. Trajectory generation and tracking control for double-steering tractor–trailer mobile robots with on-axle hitching. IEEE Trans. Ind. Electron. 2015, 62, 7665–7677. [Google Scholar] [CrossRef]
- Udwadia, F.E. Optimal tracking control of nonlinear dynamical systems. Proc. R. Soc. A Math. Phys. Eng. Sci. 2008, 464, 2341–2363. [Google Scholar] [CrossRef]
- Wang, H.; Liu, B.; Ping, X.; Quan, A. Path tracking control for autonomous vehicles based on an improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Berberich, J.; Köhler, J.; Müller, M.A.; Frank, A. Linear tracking MPC for nonlinear systems—Part II: The data-driven case. IEEE Trans. Autom. Control. 2022, 67, 4406–4421. [Google Scholar] [CrossRef]
- Pang, H.; Liu, N.; Hu, C.; Xu, Z. A practical trajectory tracking control of autonomous vehicles using linear time-varying MPC method. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 709–723. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Sinopoli, B.; Kolmanovsky, I.; Sanjoy, B. MPC-based emergency vehicle-centered multi-intersection traffic control. IEEE Trans. Control. Syst. Technol. 2022, 31, 166–178. [Google Scholar] [CrossRef]
- Mayne, D.Q.; Rawlings, J.B.; Rao, C.V.; Scokaert, P.O.M. Constrained model predictive control: Stability and optimality. Automatica 2000, 36, 789–814. [Google Scholar] [CrossRef]
- Cannon, M.; Kouvaritakis, B. Optimizing prediction dynamics for robust MPC. IEEE Trans. Autom. Control. 2005, 50, 1892–1897. [Google Scholar] [CrossRef]
- Limón, D.; Alamo, T.; Salas, F.; Camacho, E.F. On the stability of constrained MPC without terminal constraint. IEEE Trans. Autom. Control. 2006, 51, 832–836. [Google Scholar] [CrossRef]
- Gros, S.; Zanon, M.; Quirynen, R.; Bemporadc, A.; Diehl, M. From linear to nonlinear MPC: Bridging the gap via the real-time iteration. Int. J. Control. 2020, 93, 62–80. [Google Scholar] [CrossRef]
- Borrelli, F.; Falcone, P.; Keviczky, T.; Asgari, J. MPC-based approach to active steering for autonomous vehicle systems. Int. J. Veh. Auton. Syst. 2005, 3, 265–291. [Google Scholar] [CrossRef]
- Zhang, R.; Ji, Y.; Ren, L. Pre-load on the guiding/stabilizing wheels and the critical lateral force of a straddle-type monorail vehicle. Proc. Inst. Mech. Eng. Part F J. Rail Rapid Transit 2019, 233, 160–169. [Google Scholar] [CrossRef]
- Ji, Y.; Ren, L. Anti-overturning capacity and critical roll angle of straddling monorail vehicle. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2018, 232, 4420–4429. [Google Scholar] [CrossRef]
- Yue, T.; Jin, Z.; Zhipeng, Q.; Tao, P. Dynamics Simulation of Stability of Spraying Vehicles Based on Virtual Prototype. Nongye Jixie Xuebao Trans. Chin. Soc. Agric. Mach. 2015, 46, 72–78. [Google Scholar]
- Zhao, R.X.; Shan, Z.H.; Ding, H.G.; Zhang, H.Y.; Zhu, L.; Li, X.F. Reliability Analysis on Anti-overturning Stability for Truck Crane. Appl. Mech. Materials. 2014, 457, 367–370. [Google Scholar] [CrossRef]
- Xu, X.; Hu, J.; Li, K. Downhill stability analysis and dynamics simulation of the six-wheel-legged mobile robot. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 408–413. [Google Scholar]
- Grewal, M.S.; Andrews, A.P.; Bartone, C.G. Kalman Filtering; Springer: Berlin/Heidelberg, Germany, 2020; pp. 355–417. [Google Scholar]
- Pizarro, G.; Poblete, P.; Droguett, G.; Javier, P.; Felipe, N. Extended Kalman Filtering for Full-State Estimation and Sensor Reduction in Modular Multilevel Converters. IEEE Trans. Ind. Electron. 2022, 70, 1927–1938. [Google Scholar] [CrossRef]
- Yi, S.; Zorzi, M. Robust fixed-lag smoothing under model perturbations. J. Frankl. Inst. 2023, 360, 458–483. [Google Scholar] [CrossRef]
- Yi, S.; Zorzi, M. Robust kalman filtering under model uncertainty: The case of degenerate densities. IEEE Trans. Autom. Control. 2021, 67, 3458–3471. [Google Scholar] [CrossRef]
- Tsiamis, A.; Matni, N.; Pappas, G. Sample complexity of kalman filtering for unknown systems. In Proceedings of the Learning for Dynamics and Control, Virtual, 11–12 June 2020; pp. 435–444. [Google Scholar]
- Vaswani, N. Kalman filtered compressed sensing. In Proceedings of the 2008 15th IEEE International Conference on Image Processing, San Diego, CA, USA, 12–15 October 2008; pp. 893–896. [Google Scholar]
- Zhang, Y.; Chen, B.; Yu, L.; Daniel, W.C. Distributed Kalman filtering for interconnected dynamic systems. IEEE Trans. Cybern. 2021, 52, 11571–11580. [Google Scholar] [CrossRef]
- Lin, S.; Zhang, Y.; Ding, Z.; Chen, Y. Fault Detection for Automated Straddle Carriers Based on Set-membership Filtering Approach. In Proceedings of the 2022 International Symposium on Sensing and Instrumentation in 5G and IoT Era (ISSI), Shanghai, China, 17–18 November 2022; pp. 29–34. [Google Scholar]
- Revach, G.; Shlezinger, N.; Van Sloun, R.J.G.; Eldar, Y.C. Kalmannet: Data-driven kalman filtering. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021; pp. 3905–3909. [Google Scholar]
- Zhang, J.H.; Li, P.; Jin, C.C.; Zhang, W.A.; Liu, S. A novel adaptive Kalman filtering approach to human motion tracking with magnetic-inertial sensors. IEEE Trans. Ind. Electron. 2019, 67, 8659–8669. [Google Scholar] [CrossRef]
- Xu, H.; Zhang, Y.; Zhu, J.; Fan, Q. Interval trajectory tracking control of AGV based on model prediction. Control. Theory Appl. 2020, 37, 23–30. [Google Scholar]
- Li, G. Anti Overturning Control of Unmanned Straddle Carrier; Yanshan University: Qinhuangdao, China, 2019; pp. 1–74. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Numerical Values | Unit | Parameters | Numerical Values | Unit |
|---|---|---|---|---|---|
| 50 | _ | 50 | _ | ||
| 89,000 | 1,052,500 | ||||
| 560,000 | 460,000 | ||||
| 3.85 | 1.95 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ding, Z.; Lin, S.; Gu, W.; Zhang, Y. Improved Kalman-Filter-Based Model-Predictive Control Method for Trajectory Tracking of Automatic Straddle Carriers. World Electr. Veh. J. 2023, 14, 118. https://doi.org/10.3390/wevj14050118
Ding Z, Lin S, Gu W, Zhang Y. Improved Kalman-Filter-Based Model-Predictive Control Method for Trajectory Tracking of Automatic Straddle Carriers. World Electric Vehicle Journal. 2023; 14(5):118. https://doi.org/10.3390/wevj14050118
Chicago/Turabian StyleDing, Zonghe, Shuang Lin, Wei Gu, and Yilian Zhang. 2023. "Improved Kalman-Filter-Based Model-Predictive Control Method for Trajectory Tracking of Automatic Straddle Carriers" World Electric Vehicle Journal 14, no. 5: 118. https://doi.org/10.3390/wevj14050118