

A System for the Efficient Charging of EV Fleets


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Iterative Software Development Approach
- Infrastructure protection: During the simultaneous charging of EVs, huge demand peaks can occur, damaging the infrastructure or even leading to outages. The SCS must deal with several related thresholds at the same time, such as the mains connection power of the site, limitations of the local electrical infrastructure according to fuse hierarchies, capacity of individual power lines and transformers, etc. In addition, it is important to communicate with the local energy management system (EMS), if deployed on site, to quickly react on fluctuations of the available power caused by electricity consuming devices (e.g., machinery, HVAC devices) or by energy producing assets (e.g., PV, CHP).
- Management of heterogeneous charging equipment: A company’s CI can contain AC and DC chargers of various vendors, types and versions. Considering only “abstracted” equipment in the software system can lead to severe problems, because “real” devices behave differently with respect to their, e.g., charging curve characteristics, in/output ratios, means of data provisioning, interfaces, configurable parameters, etc. The larger the CI, the greater the cumulative effect of these factors can be.
- Support of EV-specific charging: During a charging session, the EV’s battery management system may autonomously increase (or lower) the demanded power. As a reaction, the SCS may limit the maximum available power or provide the EV with additional power, e.g., by rescheduling other EVs’ charging sessions. Accordingly, the SCS requires up-to-date information about connected vehicles, including the maximum allowed current/power, number of phases used, etc.
- Context-aware prioritization: In the business context, a prioritization of charging sessions is often needed: A salesperson, who wants to visit a customer and needs a “full” battery within two hours, has higher priority than another employee, who leaves the office at the evening. To determine prioritization, data items from different sources are required, e.g., planned arrival time, estimated departure time, capacity of EV batteries, current SoC, etc.
- Interoperability and scalability: The SCS must seamlessly interact with other system components over available interfaces and network protocols. It should also be able to serve CIs of different size and allow adding (removing) locations to the overall setup.
- Flexibility: CI sites have different properties and characteristics, for example, with regard to the number and type of served EVs, usual charging times, local infrastructure limitations, etc. Consequently, the structure and operational complexity of the SCS also varies between deployment sites. In order to address this, the SCS needs to be built to be modular and thus adaptable to the given infrastructure, EV fleet, user needs, and prioritization requirements. In general, the SCS must be able to work in different complexity levels and enable adding/removing components independently from each other.
- Exception handling: In case of errors, e.g., due to malfunctioning charging stations or EVs, a proper exception handling in near real time is needed. Thereby, vendor- and device-specific error messages must be captured and properly interpreted. It must also be ensured that failing or bad network connectivity (HTTP, WebSocket, TCP/IP) does not jeopardize running charging sessions and missing data are handled when planning new sessions. If there is an outage in the local electrical system, a safe restart of charging procedures is required.
2.2. Method of System Evaluation
3. Results and Discussion
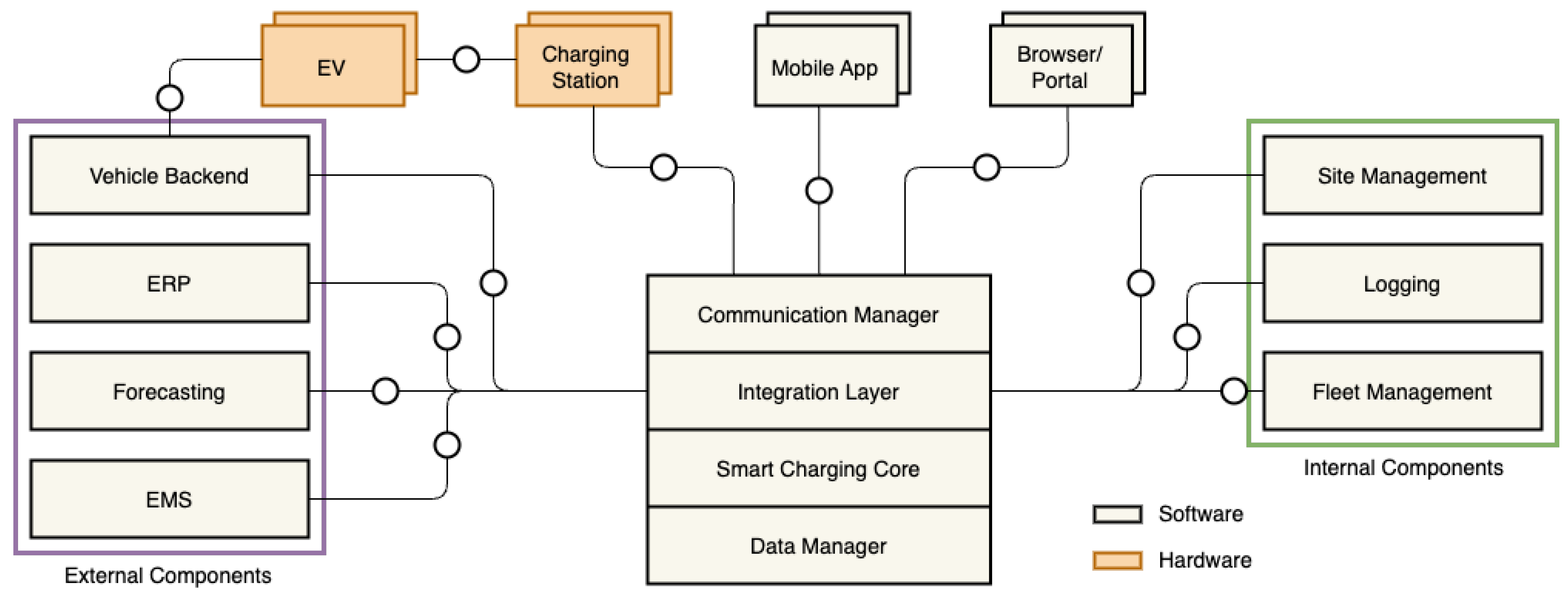
3.1. System Design
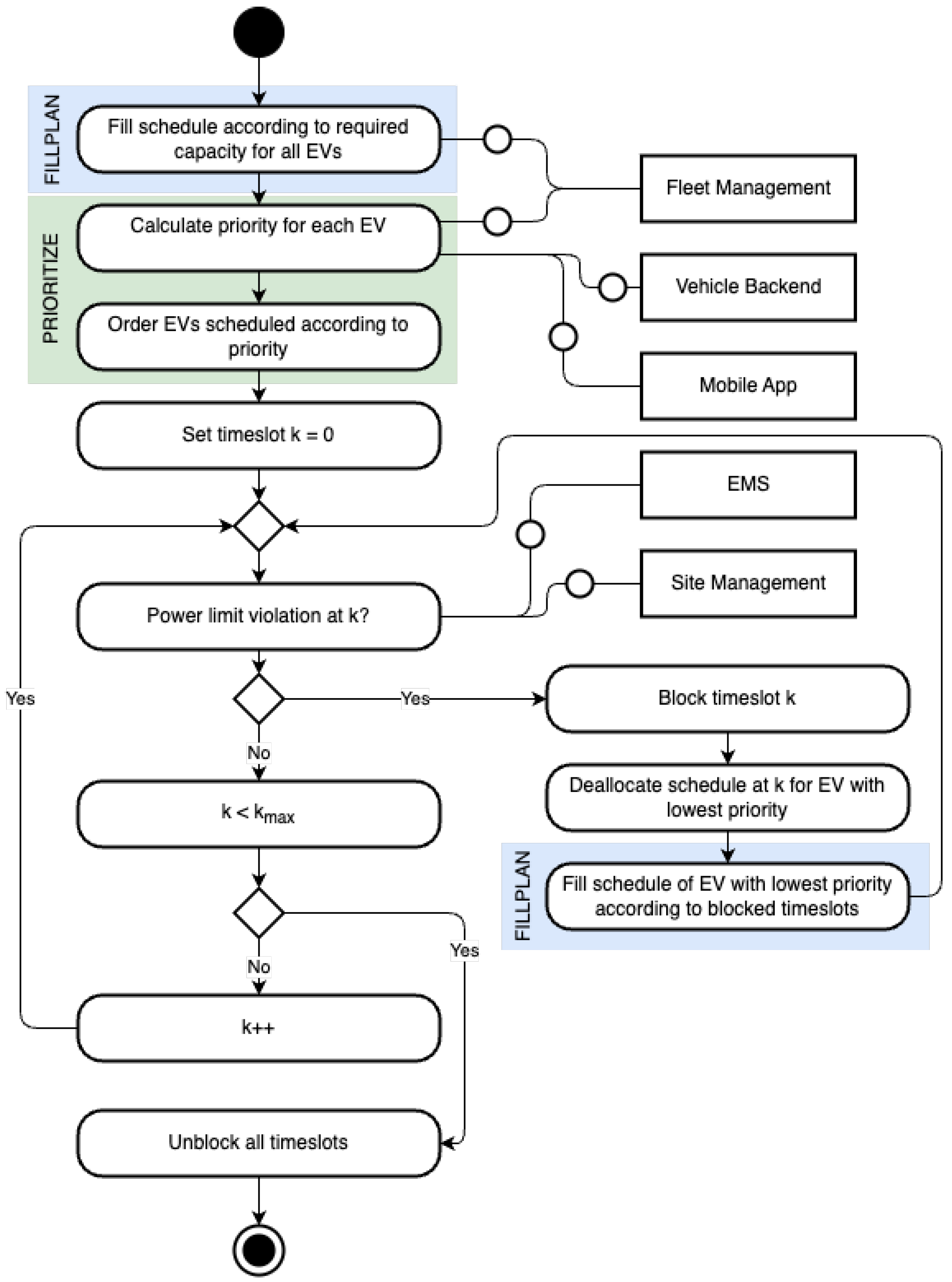
3.2. Smart Charging Core
| Algorithm 1 Scheduling procedure |
|
| Algorithm 2 Procedure to fill EV charge plans |
|
| Algorithm 3 Prioritization procedure |
|
3.3. Integration Layer
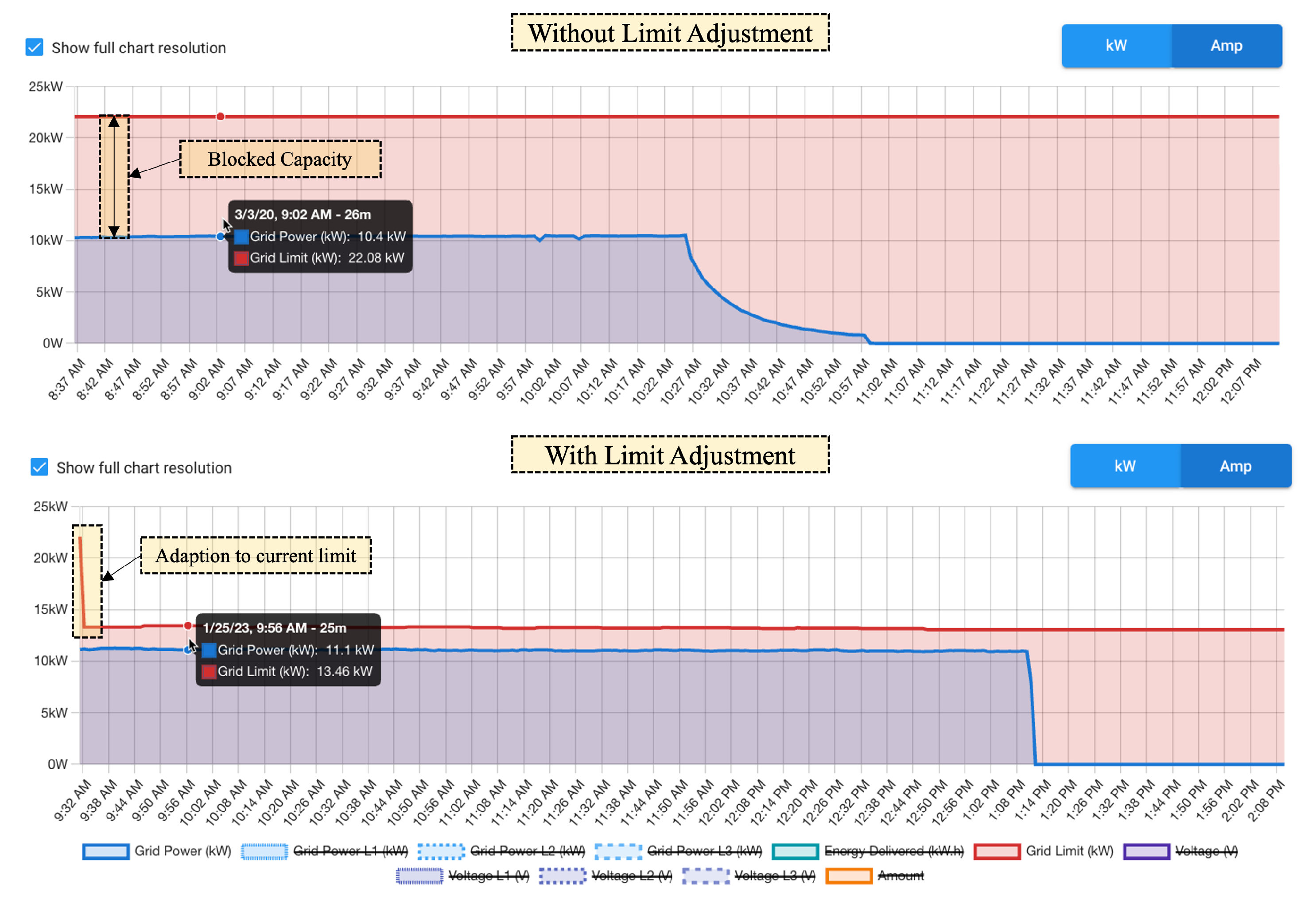
- Error and Exception Handling: The SCS presupposes a proper implementation of OCPP by the charging stations and the support of OCPP charging profiles. However, OCPP implementations vary by charging station manufacturer and model. Compatibility problems often appear in specific setups and cases, which were not known upfront. The Integration Layer offers different mechanisms to master such situations. When collecting data to properly configure the core scheduling algorithm, the capabilities of connected stations are checked. It is especially examined whether each station is able to work with the generated OCPP profiles. If not, the given charging station will be excluded from the optimization, because it cannot be limited. In order to not endanger the electrical infrastructure, the SCS will automatically adjust infrastructure limits for the next optimization cycles by subtracting the maximum power that the incompatible station can draw. The adjustment of these limits only happens if the affected charging station is charging. Otherwise, the full capacity can be considered by the optimization. A similar mechanism is applied if a charging station is rejecting or not answering to charging profile requests, e.g., due to network issues. In this case, the faulty stations are collected and handled as incompatible charging stations in a separate optimization cycle. At the same time, a notification framework informs the administrators about the stations, which are not working correctly in order to take action if the issue persists.
- AC/DC Handling: The Integration Layer supports both AC and DC charging sessions according to their specifics. AC sessions can use one, two, or all three phases depending on the given charging station and connected EV. When triggering the Smart Charging Core, this information must be taken into account to determine the demanded charging current per phase. DC stations usually use all three phases, which makes phase assignments redundant. For DC chargers, however, the efficiency values need to be taken into account because the conversion from AC to DC is carried out by the charging station and not by the EV (as in case of AC chargers).
- Vendor-specific handling: Charging station vendors tend to vary in how they handle OCPP charging profiles, for example, by using their preferred measurement units (kW or Ampere). Therefore, the Integration Layer provides a framework and mechanism to adapt a generic charging profile template to vendor specific requirements.
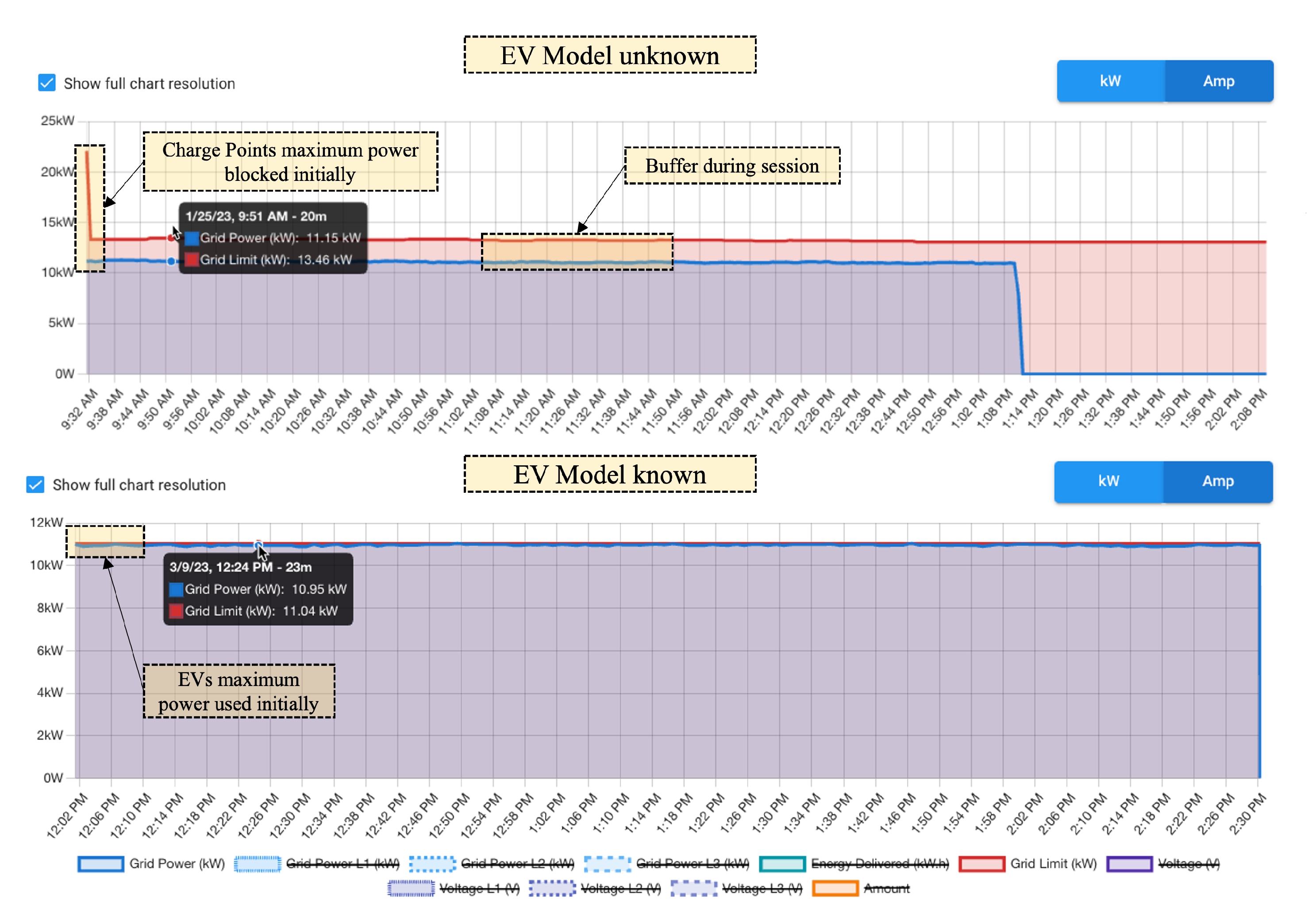
- EV-specific handling: With the help of the Fleet Management component, the SCS is able to retrieve data about converters and batteries of almost every EV-model on the market, by using the Electric Vehicle Database [25] and other similar repositories. To keep the vehicle data up to date, synchronization jobs with the respective data sources are implemented. The data can be used to instantiate vehicles of a certain type in Fleet Management. By assigning these vehicles to users, the system can determine which EV model is charging at which station, without the need to establish a communication channel to the EV itself. The extracted information (converter data, battery size) is used to send power limits and battery capacities to the Smart Charging Core instead of waiting for actual monitored consumption data and adopting power limits later. In addition, the system provides implementations of service interfaces offered by OEMs, such as Mercedes, and also by third-party service platforms, like Tronity, to receive live information about the current state of charge during AC sessions. The stored data of the EVs are extended with this information and can be provided for different purposes such as priority handling.
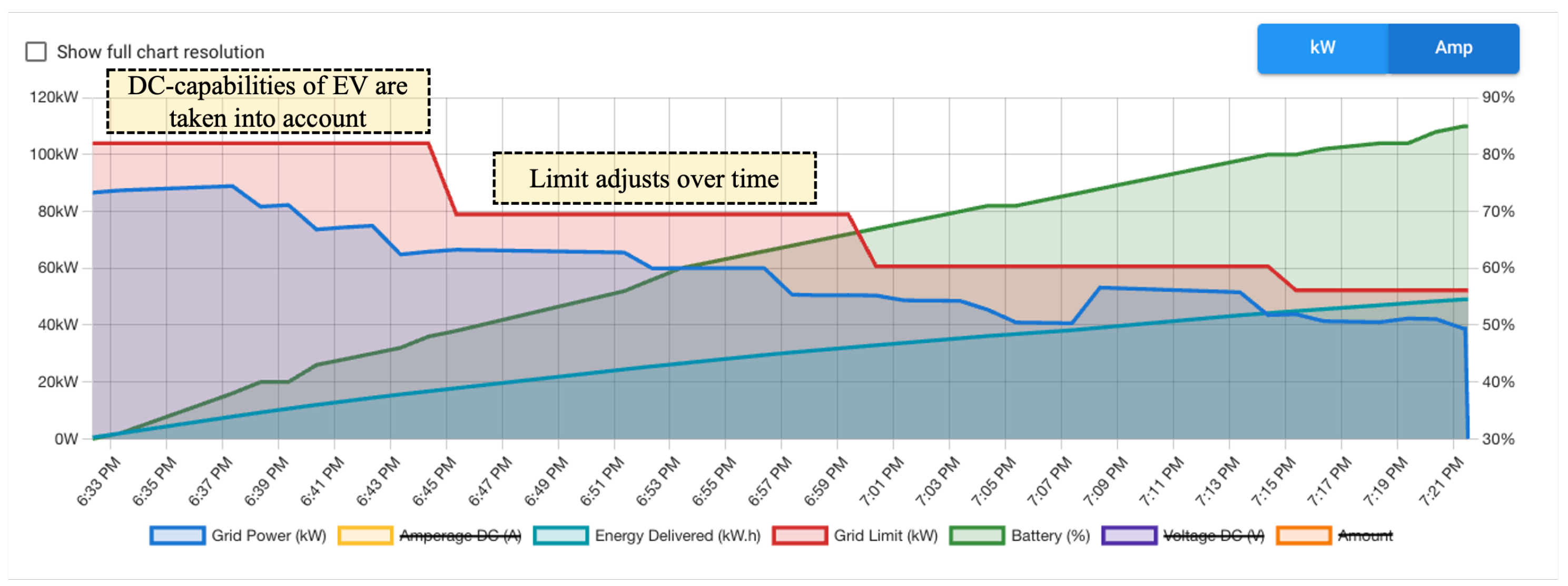
- Real-time behaviour adaptation: The process of EV charging (both AC and DC) can be influenced by many factors. The charging curve, i.e., the power drawn over time, depends not only on the type, age, and condition of the hardware on the vehicle side but also on external parameters, such as temperature. In some cases, significant deviations from the expected model-specific behaviour can be observed when charging a particular EV. A negative implication can be that EVs consume less power than expected and thus allocated to the session when it started. DC chargers especially manage power usage actively by monitoring the connected battery’s charging status. An efficient charging system must react to such varying (in general, unpredictable) power curves. The Integration Layer captures the momentary power drawn in the charging sessions and supports the SCS in calculating the real charge demand of a particular vehicle. The implemented mechanism puts a buffer on top of the observed power output of the charging station and uses the increased value as a new power limit for the session, whereby the new limit remains below the connector’s maximum limit. By supervising whether the EV uses the buffer, the algorithm can determine if the car would be able to draw more power and provide it to the session if available. This way, it is also ensured that incorrect or missing vehicle data does not lead to the allocation of later unused power capacity.
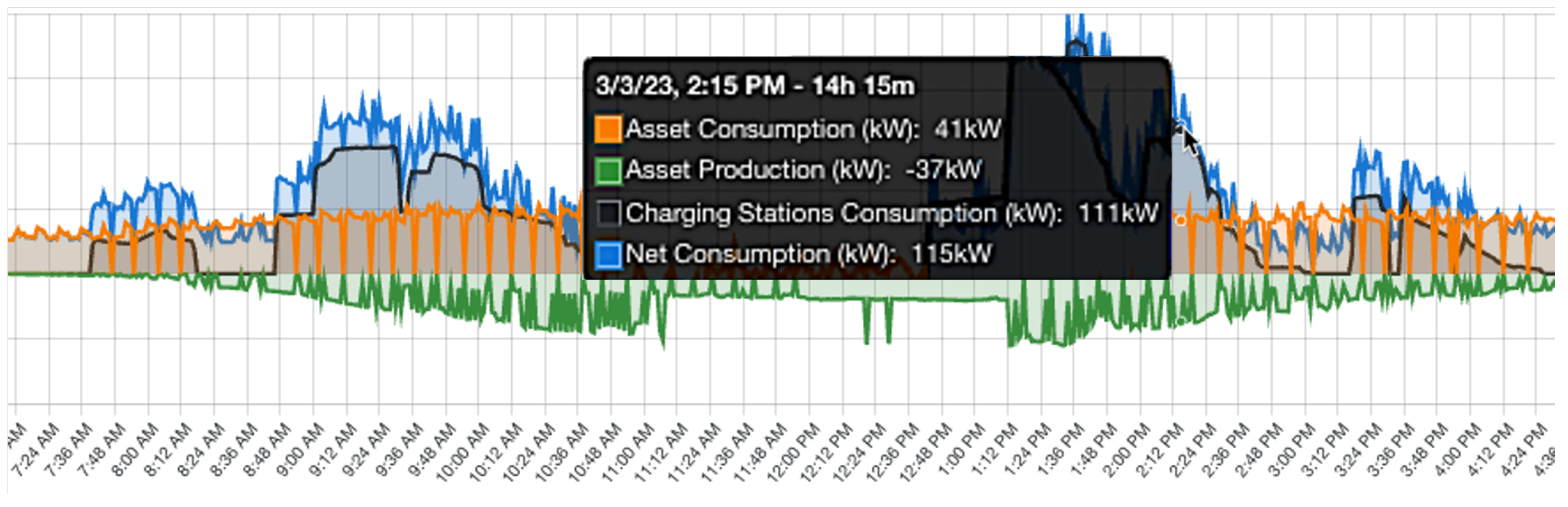
- Dynamic power limits: In most cases, charging stations are operated in combination with other energy consuming or producing devices. The amount of demanded and produced power within an electrical system can heavily vary depending on season, time of the day, temperature, weather, etc. Setting a fixed, safety-oriented power limit for the CI could make it basically independent from the fluctuations but lead to lower throughput and efficiency. For this reason, the SCS can be integrated with external EMS that monitors and controls the overall electrical infrastructure on site. This integration should be as flexible as possible, to support as many EMS providers as possible. Thus, the SCS provides an API endpoint to push energy data, but also integrates with external APIs to pull/request data from. By taking into account EMS data, it is possible to dynamically adapt the available power for the CI according to the current solar production, building consumption, etc.
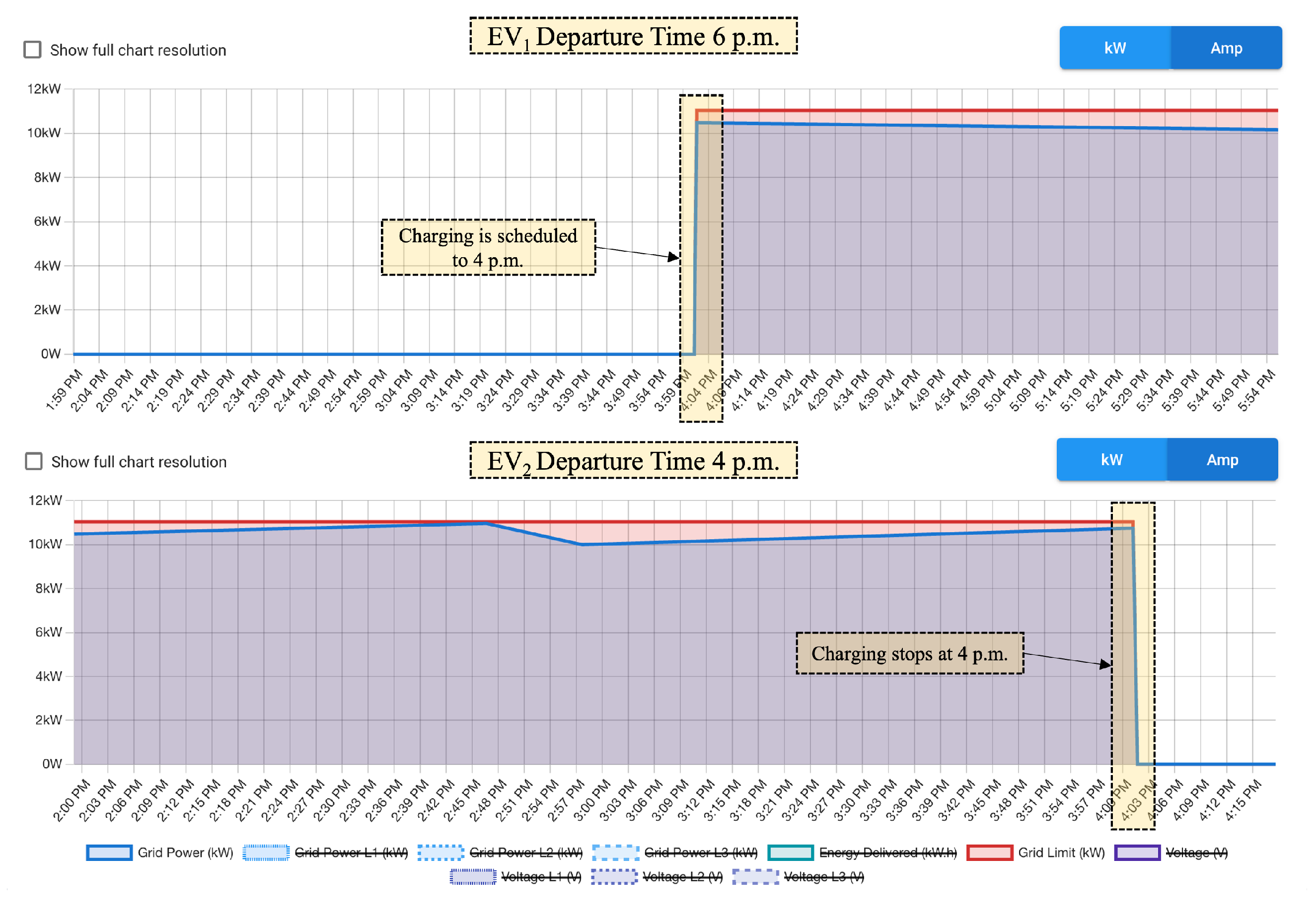
- Priority Handling: To support the prioritization of EVs (as shown in Algorithm 3) and related charging sessions, the SCS collects as much information as possible. For instance, the Mobile App provides a dialogue for the driver to enter their planned departure time, required state of charge, and also the current state of charge (if the data are not provided by another integrated source or service). After the data are collected, they are processed and passed to the Smart Charging Core, which uses the received parameters to determine which EVs are prioritized and can thus charge faster. This ensures a fair sharing of power among trustworthy EV drivers and helps minimize inactivity times.
3.4. Implementation and Deployment in a Real-World Testbed
4. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| API | Application Programming Interface |
| CHP | Combined Heat and Power |
| CI | Charging Infrastructure |
| CP | Charging Point |
| EMS | Energy Management System |
| ERP | Enterprise Resource Planning |
| EV | Electric Vehicle |
| OCPP | Open Charge Point Protocol |
| REST | Representational State Transfer |
| RFID | Radio Frequency Identification |
| SCS | Smart Charging System |
| SoC | State of Charge |
| TCO | Total Cost of Ownership |
References
- Kraftfahrt-Bundesamt. Statistik—Neuzulassungen Alternative Antriebe. Available online: https://www.kba.de/DE/Statistik/Produktkatalog/produkte/Fahrzeuge/fz28/fz28_gentab.html?nn=354746 (accessed on 28 September 2023).
- Bodenschatz, N.; Eider, M.; Berl, A. Challenges and Requirements of Electric Vehicle Fleet Charging at Company Parking Sites. In Proceedings of the 2021 11th International Conference on Advanced Computer Information Technologies (ACIT), Deggendorf, Germany, 15–17 September 2021; pp. 623–628. [Google Scholar] [CrossRef]
- Frendo, O.; Karnouskos, S.; Gaertner, N.; Kipouridis, O.; Rehman, K.; Verzano, N. Charging Strategies and Implications for Corporate Electric Vehicle Fleets. In Proceedings of the 2018 IEEE 16th International Conference on Industrial Informatics (INDIN), Porto, Portugal, 18–20 July 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 466–471. [Google Scholar] [CrossRef]
- Voss, M.F.; Haveman, S.P.; Bonnema, G.M. In-Company Smart Charging: Development of a Simulation Model to Facilitate a Smart EV Charging System. Energies 2021, 14, 6723. [Google Scholar] [CrossRef]
- Frendo, O.; Graf, J.; Gaertner, N.; Stuckenschmidt, H. Data-Driven Smart Charging for Heterogeneous Electric Vehicle Fleets. Energy AI 2020, 1, 100007. [Google Scholar] [CrossRef]
- Bera, T.K.; Bohre, A.K.; Ahmed, I.; Bhattacharya, A.; Yadav, A. Smart Charging for Electric Vehicles (EVs): A Short Review. In Proceedings of the 2022 IEEE Global Conference on Computing, Power and Communication Technologies (GlobConPT), New Delhi, India, 23–25 September 2022; pp. 1–6. [Google Scholar] [CrossRef]
- Al-Hanahi, B.; Ahmad, I.; Habibi, D.; Masoum, M.A.S. Charging Infrastructure for Commercial Electric Vehicles: Challenges and Future Works. IEEE Access 2021, 9, 121476–121492. [Google Scholar] [CrossRef]
- Deb, S.; Pihlatie, M.; Al-Saadi, M. Smart Charging: A Comprehensive Review. IEEE Access 2022, 10, 134690–134703. [Google Scholar] [CrossRef]
- Waclaw, A.; Aloise, T.; Lienkamp, M. Charging Infrastructure Design for Commercial Company Sites with Battery Electric Vehicles: A Case Study of a Bavarian Bakery. In Proceedings of the 2020 Fifteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 10–12 September 2020; pp. 1–10. [Google Scholar] [CrossRef]
- Wallberg, A.; Flygare, C.; Waters, R.; Castellucci, V. Peak Shaving for Electric Vehicle Charging Infrastructure—A Case Study in a Parking Garage in Uppsala, Sweden. World Electr. Veh. J. 2022, 13, 152. [Google Scholar] [CrossRef]
- Ma, T.; Mohammed, O.A. Optimal Charging of Plug-in Electric Vehicles for a Car-Park Infrastructure. IEEE Trans. Ind. Appl. 2014, 50, 2323–2330. [Google Scholar] [CrossRef]
- Zhang, G.; Tan, S.T.; Wang, G.G. Real-Time Smart Charging of Electric Vehicles for Demand Charge Reduction at Non-Residential Sites. IEEE Trans. Smart Grid 2018, 9, 4027–4037. [Google Scholar] [CrossRef]
- Frendo, O.; Gaertner, N.; Stuckenschmidt, H. Real-Time Smart Charging Based on Precomputed Schedules. IEEE Trans. Smart Grid 2019, 10, 6921–6932. [Google Scholar] [CrossRef]
- Jiang, W.; Zhen, Y. A Real-Time EV Charging Scheduling for Parking Lots with PV System and Energy Store System. IEEE Access 2019, 7, 86184–86193. [Google Scholar] [CrossRef]
- Deb, S.; Goswami, A.K.; Harsh, P.; Sahoo, J.P.; Chetri, R.L.; Roy, R.; Shekhawat, A.S. Charging Coordination of Plug-In Electric Vehicle for Congestion Management in Distribution System Integrated with Renewable Energy Sources. IEEE Trans. Ind. Appl. 2020, 56, 5452–5462. [Google Scholar] [CrossRef]
- Rottondi, C.; Neglia, G.; Verticale, G. Complexity Analysis of Optimal Recharge Scheduling for Electric Vehicles. IEEE Trans. Veh. Technol. 2016, 65, 4106–4117. [Google Scholar] [CrossRef]
- Sepetanc, K.; Pandzic, H. A Cluster-Based Model for Charging a Single-Depot Fleet of Electric Vehicles. IEEE Trans. Smart Grid 2021, 12, 3339–3352. [Google Scholar] [CrossRef]
- Meng, Z.; Xia, X.; Xu, R.; Liu, W.; Ma, J. HYDRO-3D: Hybrid Object Detection and Tracking for Cooperative Perception Using 3D LiDAR. IEEE Trans. Intell. Veh. 2023, 8, 4069–4080. [Google Scholar] [CrossRef]
- Xia, X.; Meng, Z.; Han, X.; Li, H.; Tsukiji, T.; Xu, R.; Zheng, Z.; Ma, J. An Automated Driving Systems Data Acquisition and Analytics Platform. Transp. Res. Part C Emerg. Technol. 2023, 151, 104120. [Google Scholar] [CrossRef]
- SAP Labs France. Open E-Mobility. Available online: https://github.com/sap-labs-france (accessed on 28 September 2023).
- SAP. E-Mobility Charging Stations Simulator. Available online: https://github.com/SAP/e-mobility-charging-stations-simulator (accessed on 28 September 2023).
- Frendo, O.; Gaertner, N.; Stuckenschmidt, H. Open Source Algorithm for Smart Charging of Electric Vehicle Fleets. IEEE Trans. Ind. Inform. 2021, 17, 6014–6022. [Google Scholar] [CrossRef]
- SAP. Emobility-Smart-Charging. Available online: https://github.com/SAP/emobility-smart-charging (accessed on 16 November 2023).
- Open-Charge-Alliance. OCPP 1.6. Available online: https://www.openchargealliance.org/protocols/ocpp-16/ (accessed on 28 September 2023).
- EV Database. Electric Vehicle Database. Available online: https://ev-database.org/ (accessed on 28 September 2023).
- Apel, S.; Kästner, C. An Overview of Feature-Oriented Software Development. J. Object Technol. 2009, 8, 49. [Google Scholar] [CrossRef]
- Fowler, M. FeatureFlag. Available online: https://martinfowler.com/bliki/FeatureFlag.html (accessed on 16 November 2023).
- Hodgson, P. Feature Toggles (Aka Feature Flags). Available online: https://martinfowler.com/articles/feature-toggles.html (accessed on 16 November 2023).
- Gamma, E. (Ed.) Design Patterns: Elements of Reusable Object-Oriented Software, 39th ed.; Addison-Wesley Professional Computing Series; Addison-Wesley: Boston, MA, USA, 2011. [Google Scholar]
- Fielding, R.T. Architectural Styles and the Design of Network-based Software Architectures. Ph.D. Thesis, University of California, Irvine, CA, USA, 2000. [Google Scholar]
- Gohlke, S.; Nochta, Z. Towards a Short-Term Forecasting Framework to Efficiently Charge Company EV Fleets. In Proceedings of the 7th E-Mobility Power System Integration Symposium (EMOB2023), Copenhagen, Denmark, 25 September 2023; pp. 191–198. [Google Scholar] [CrossRef]
- Green4EVer. Project Website. Available online: https://www.h-ka.de/en/iaf/green4ever (accessed on 28 September 2023).







Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Fleck, T.; Gohlke, S.; Nochta, Z. A System for the Efficient Charging of EV Fleets. World Electr. Veh. J. 2023, 14, 335. https://doi.org/10.3390/wevj14120335
Fleck T, Gohlke S, Nochta Z. A System for the Efficient Charging of EV Fleets. World Electric Vehicle Journal. 2023; 14(12):335. https://doi.org/10.3390/wevj14120335
Chicago/Turabian StyleFleck, Tobias, Sascha Gohlke, and Zoltan Nochta. 2023. "A System for the Efficient Charging of EV Fleets" World Electric Vehicle Journal 14, no. 12: 335. https://doi.org/10.3390/wevj14120335