1. Introduction
Amidst a growing urgency to cut down on greenhouse gas emissions and shift towards more environmentally friendly modes of transportation [
1,
2], the electrification of medium-duty and heavy-duty (MDHD) trucks has emerged as a crucial part of the transition. According to the International Energy Agency (IEA), the global fleet of electric MDHD trucks is projected to approach 4 million units by the year 2030 [
3]. In the United States, California has taken a pioneering stance by mandating that 75% of all Class 4–8 straight truck sales within the state must be zero-emission by 2035 [
4], with more stringent requirements continuing to be proposed. However, the integration of these MDHD electric vehicles into existing distribution networks introduces a set of intricate challenges, including hosting capacity constraints and voltage stability issues [
5]. This complexity is exacerbated by the substantial battery capacities and increased charging power demands characteristic of MDHD EVs, both of which can threaten the stability of distribution grids [
6]. MDHD vehicles, often charged collectively at depot facilities due to the operational nature of commercial fleets, pose a set of challenges distinct from their light-duty counterparts, which are more commonly charged separately across residential neighborhoods [
3]. Consequently, distribution system operators must prepare to address the unique charging requirements associated with MDHD EVs.
As a result, tackling the incorporation of MDHD EVs or entire electric vehicle fleets into the power grid has become a prominent research focus. In a study by Hong et al. [
7], automated electrified freight transportation systems were simulated to evaluate the repercussions of interactions between electrified mobility and the grid. Their findings indicate that automation significantly reduces costs and peak loads, both of which posed challenges for human-driven MDHD EVs. In a separate study by Vandael et al. [
8], the authors introduce a cost-effective day-ahead consumption plan for an EV fleet, relying on reinforcement learning techniques. Other research endeavors delve into the necessary charging infrastructure requirements for MDHD EVs, underscoring the importance of strategically siting high-power charging stations to ensure the economic feasibility of MDHD EV integration [
9].
The aforementioned studies, however, do not address the potential voltage stability issues that accompany large-scale MDHD EV charging. One solution to voltage instability, especially that caused by the integration of distributed energy resources (DERs), is reactive power compensation [
10]. Reactive power is essential for maintaining voltage levels within acceptable bounds [
11] and can help counteract voltage drops and fluctuations that may occur due to changes in load or other system disturbances [
12]. Thus, generating and managing reactive power effectively is a fundamental aspect of maintaining the reliability of an electrical power system. Traditional methods of reactive power management have included capacitor-based solutions such as shunt compensation [
13].
More recently, however, a field of research has emerged to study the use of DERs themselves for reactive power compensation. For example, some studies focus on the use of battery energy storage systems—such as the authors in [
14], who utilize a voltage stability evaluation model to coordinate real and reactive compensation from battery energy storage. In [
15], the authors propose voltage control through a decentralized architecture that can coordinate active and reactive power injections by DERs. Others focus on the use of renewable energy resources for reactive power compensation. For example, in [
11], the authors utilize both shunt capacitors and distributed wind generation, facilitated by static and dynamic analyses, to support voltage stability on the distribution network. In [
16], the authors utilize a two-part control scheme to manage reactive power injection from a grid-integrated solar photovoltaic (PV) inverter. Finally, the authors in [
17] exploit the flexibility of PVs to inject and absorb reactive power in order to stabilize voltage in areas of dense EV charging.
It is also possible for EVs to provide reactive power compensation. Research on advanced EV chargers that operate in full four quadrants has enabled a broader view of EV charging with both active and reactive power [
18,
19]. The newest studies demonstrate that EVs can provide an efficient way to support power grids with reactive power. In [
20], the authors propose an efficient control strategy and novel EV charger to enable EVs to inject reactive power into the grid. In [
21], the authors utilize a model predictive control method to enable EVs to act as reactive power compensation devices and mitigate voltage instability. In [
22], the authors assess the voltage violation risks in distribution networks considering the reactive power response of smart inverters including both EV and PV chargers. However, the locations of the smart chargers are randomly assigned and there is no voltage profile provided after the reactive power compensation.
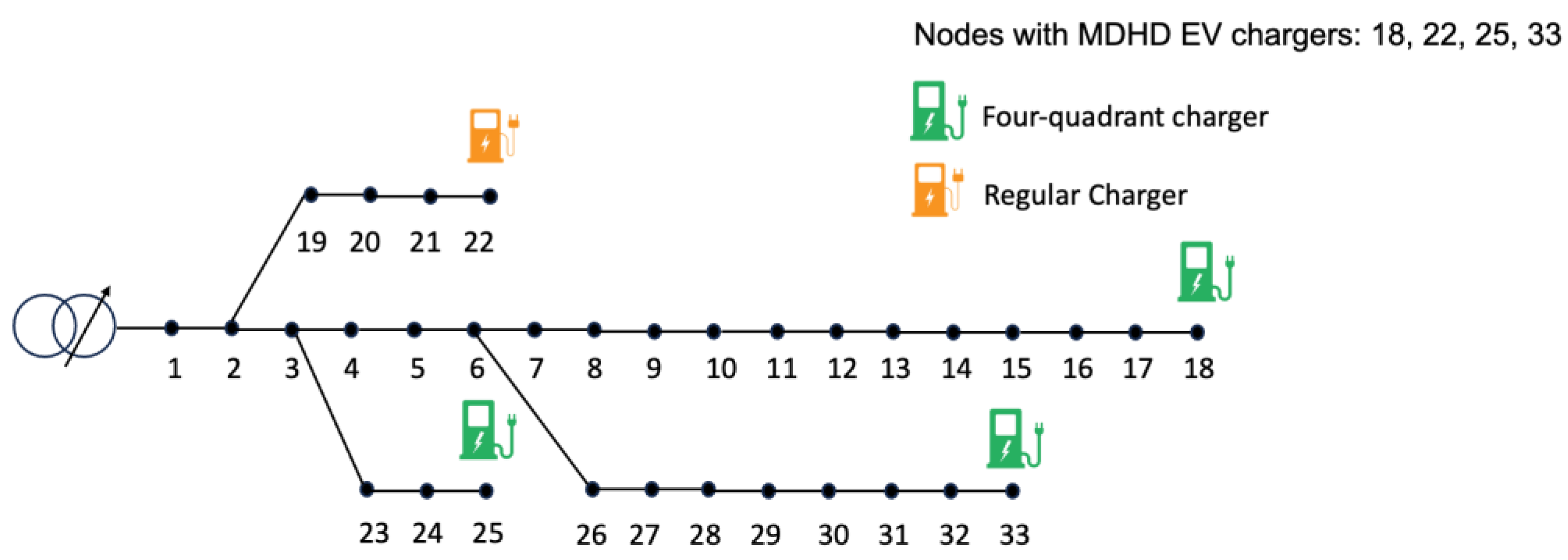
Our study builds on previous work on EV reactive power compensation to specifically consider the challenges of integrating MDHD EVs. We aim to optimize the power flow within the distribution network, with the goal of minimizing voltage fluctuations at individual bus locations that host MDHD EV charging infrastructure. This optimization is executed by exploiting the reactive power compensation potential of MDHD EVs, facilitated through the utilization of four-quadrant chargers [
23] during high-power depot charging sessions.
In order to accomplish this task, it is crucial to coordinate the reactive power injections via an optimization algorithm that can produce voltage stabilization solutions in a computationally efficient manner. Previous research has explored the use of various optimization strategies for voltage stabilization and for EV charging scheduling more broadly. For example, many researchers have turned to metaheuristic algorithms for optimization. Metaheuristic algorithms are a class of optimization techniques used to solve complex problems for which traditional mathematical or algorithmic methods may not be efficient or applicable [
24]. These algorithms are designed to explore and exploit solution spaces effectively, often inspired by natural phenomena or human behavior [
25]. Unlike specific problem-solving algorithms, metaheuristics provide a flexible framework that can be adapted to a wide range of optimization challenges including the optimal power flow problem [
26]. Therefore, they can be extremely useful in regulating reactive power compensation from MDHD EVs.
Although MDHD EVs are a relatively new topic for research, utilizing metaheuristics for EV charging does have precedence in the literature. For example, the authors in [
27] utilize a metaheuristic called the water cycle algorithm to minimize the price and peak load of light-duty EV charging, taking advantage of reactive power compensation from the vehicles. In [
28], a metaheuristic called particle swarm optimization is utilized to facilitate both PV and light-duty EV reactive power injections into the grid, highlighting the need for optimization in reactive power compensation problems. Lastly, the authors in [
29] utilize an improved mixed real and binary vector-based swarm optimization to coordinate high-penetration EV charging and maintain energy and voltage stability in a distribution grid. However, although this study includes impressive case studies, it does not consider four-quadrant EV charging, does not investigate MDHD EVs, and does not explore more than one optimization algorithm.
Table 1 compares the solutions explored in the reactive power compensation literature.
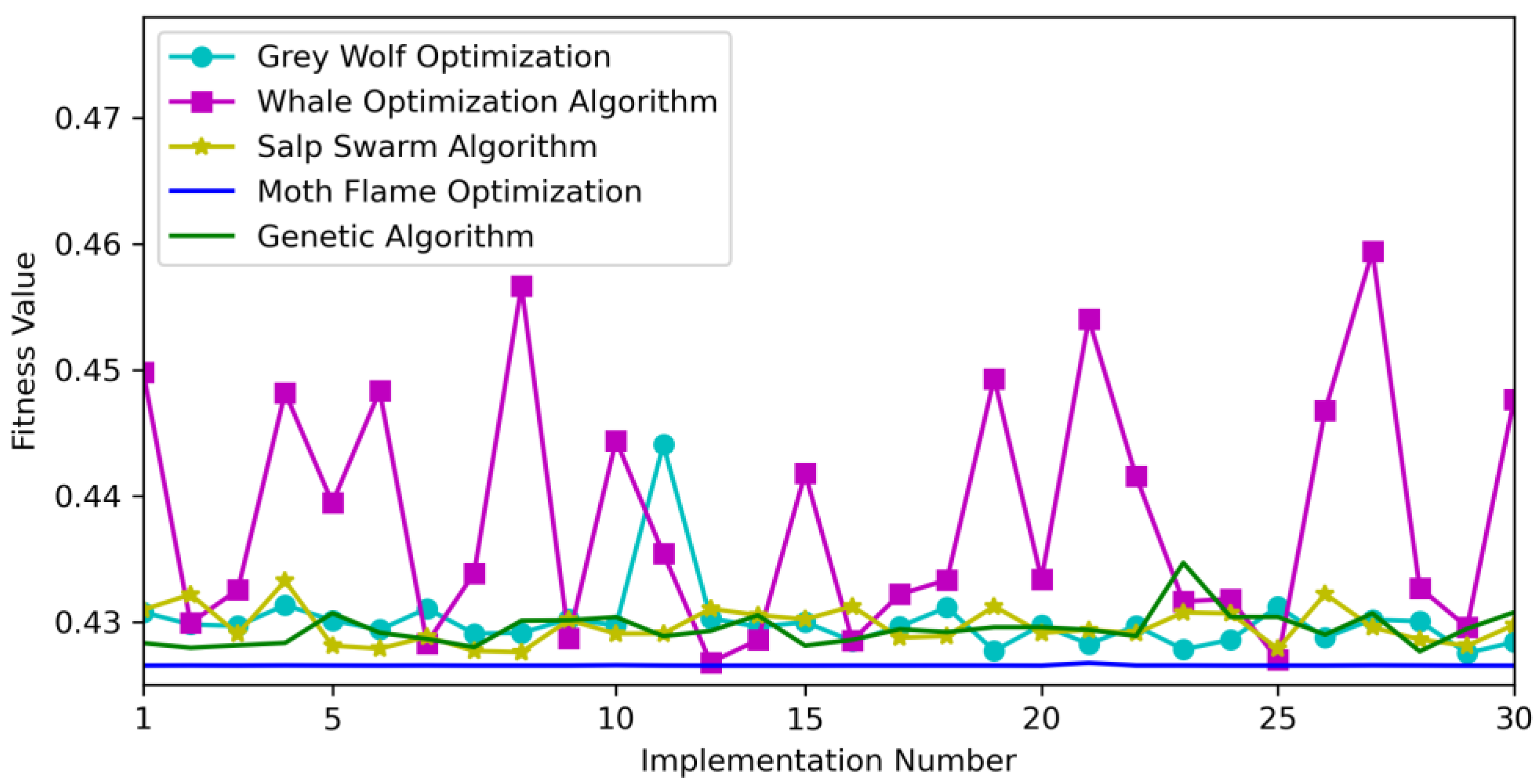
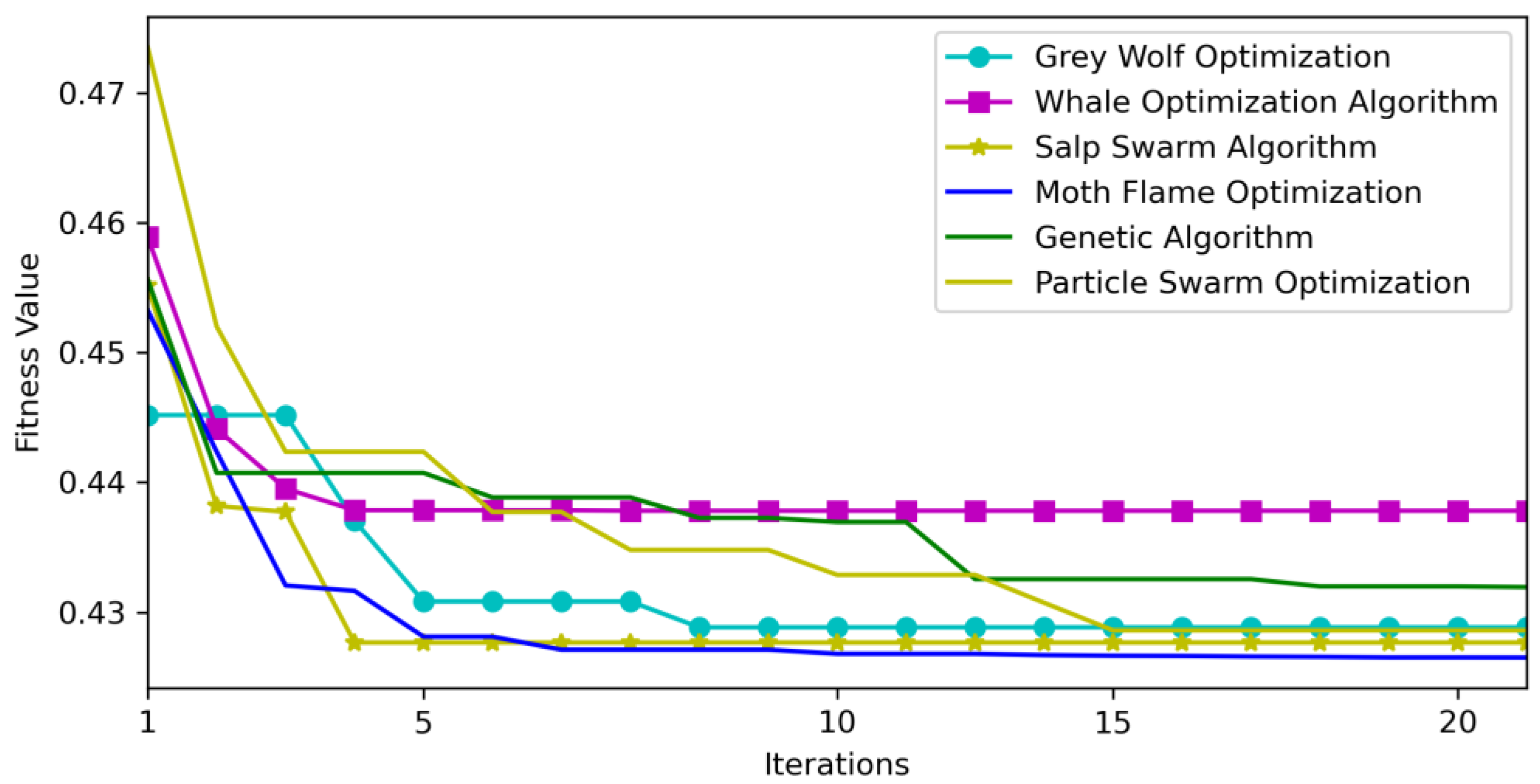
Our proposed methodology explores and compares the capabilities of multiple metaheuristic algorithms. We have carefully evaluated an assortment of metaheuristics to determine which may be the most effective in stabilizing distribution network voltage. The tested algorithms include the genetic algorithm [
30], particle swarm optimization [
31], moth flame optimization [
32], the salp swarm algorithm [
33], whale optimization [
34], and grey wolf optimization [
35]. The specific evaluation criterion considers the capacity of these metaheuristic algorithms to augment voltage stability, curtail power losses, and exhibit computational efficiency.
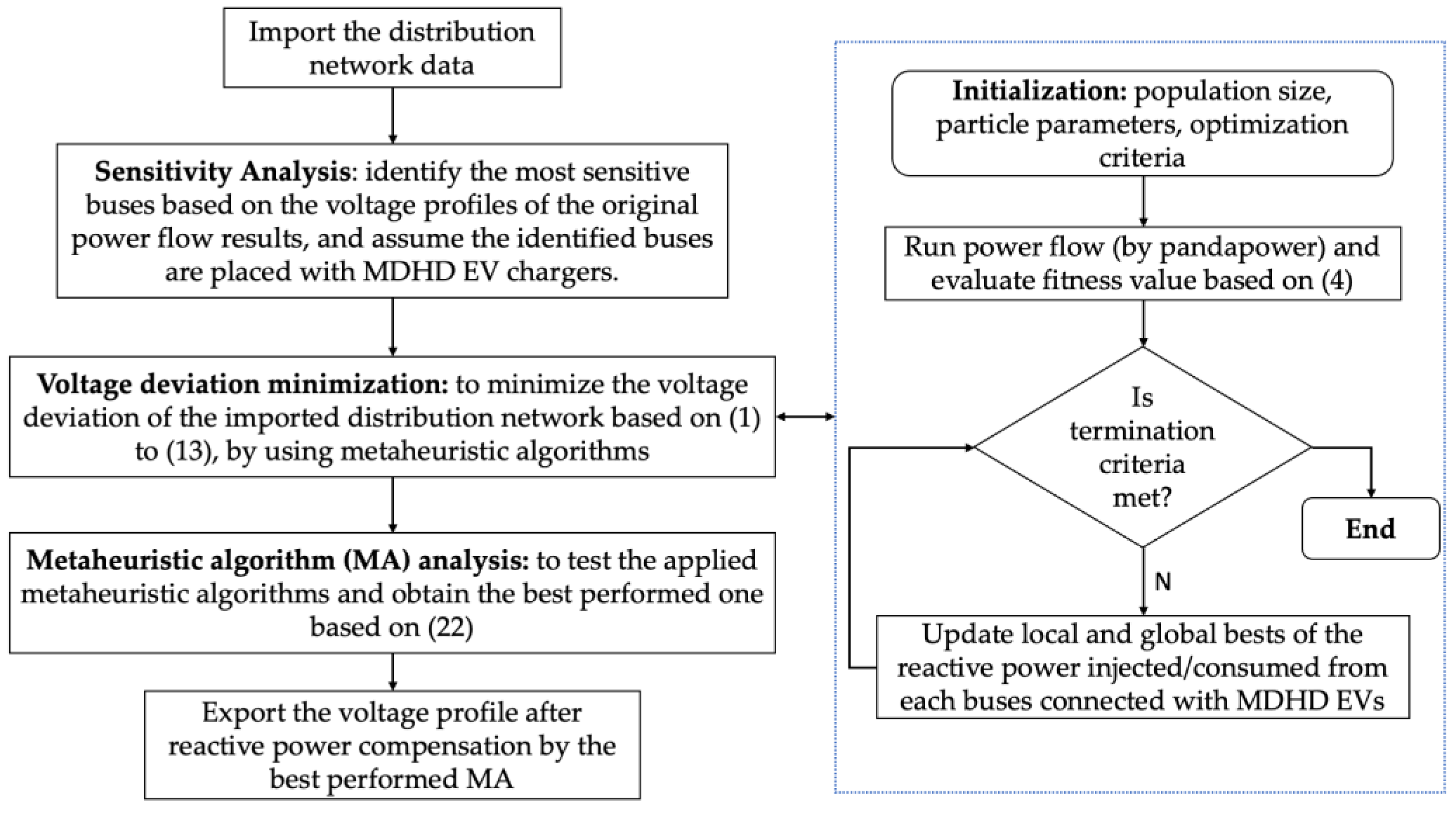
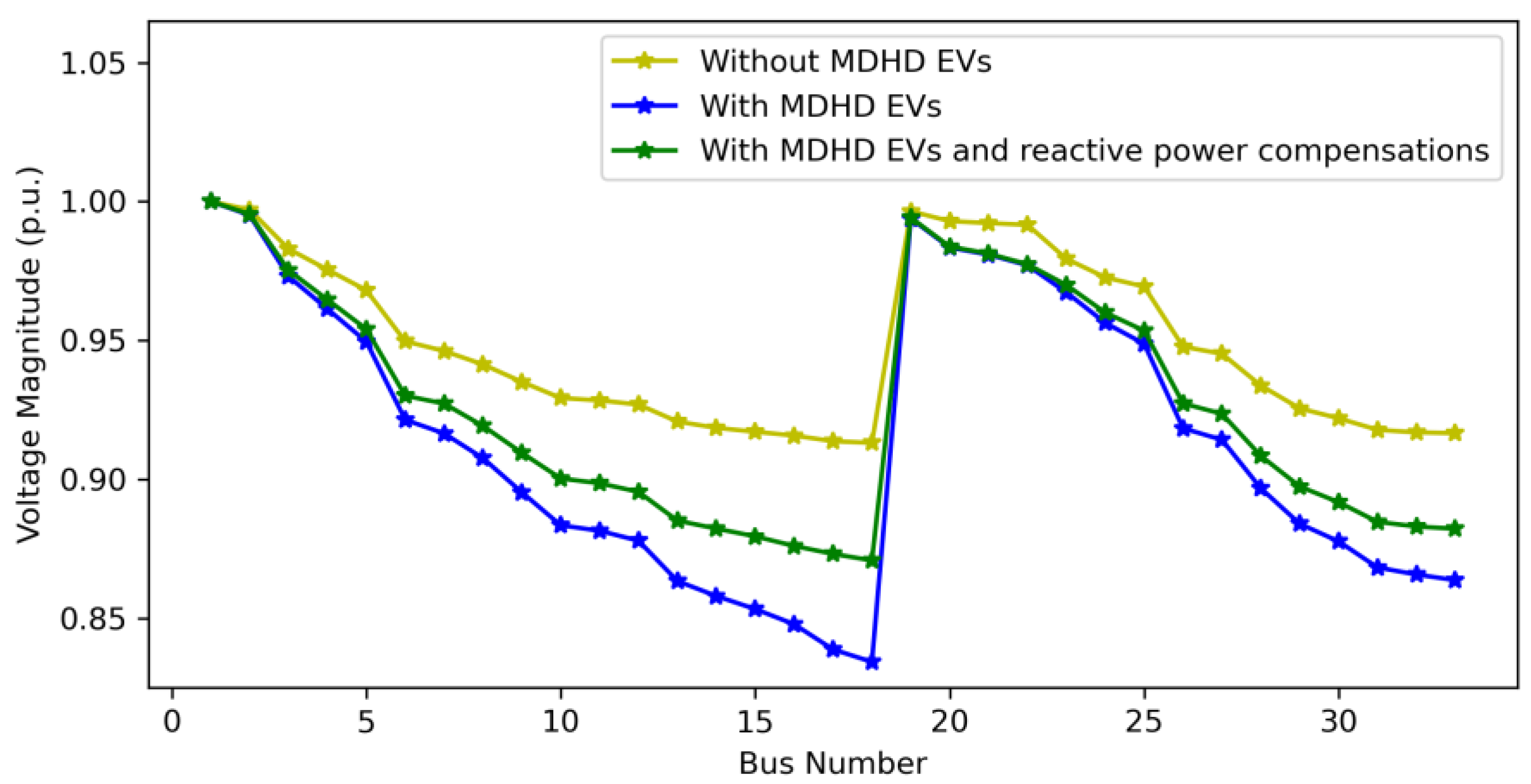
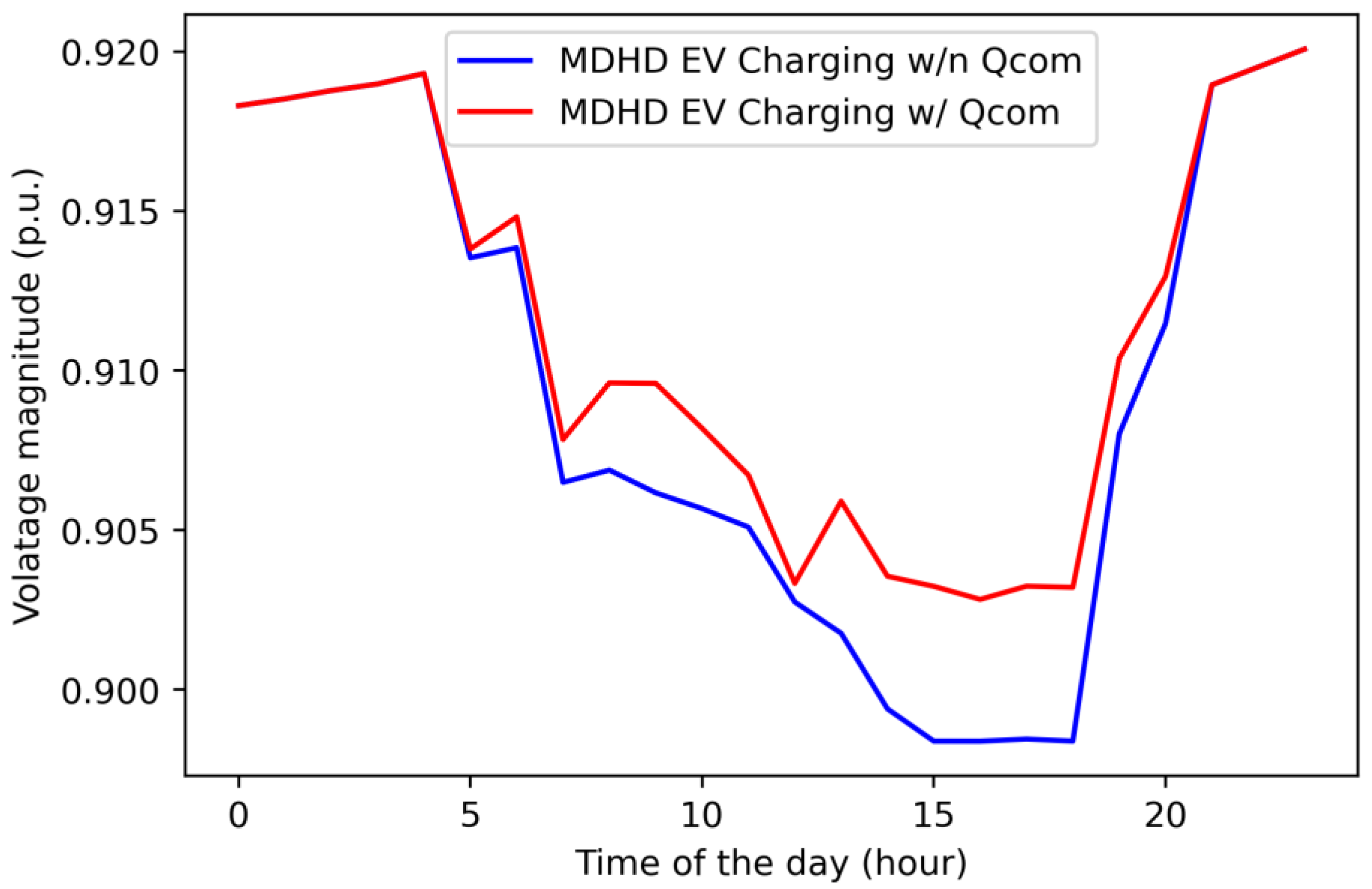
The goals of this paper are to first identify the most sensitive buses in a power distribution network which may have the highest impact on voltage profile deviation and power loss reduction and then to conduct reactive power compensation from MDHD EVs at the identified buses while the EVs are charging. This problem is formulated to minimize voltage magnitude deviation at individual bus locations and is solved by a metaheuristic algorithm. We apply and investigate several metaheuristic algorithms to determine which provides the optimal solution with a thorough evaluation over three dimensions—voltage deviation, power losses, and computational time.
The main contributions of this study are (1) an analysis of the influence of MDHD EVs’ depot charging on power distribution network voltage stability; (2) the employment of a novel approach that first identifies the weakest buses of the distribution network and then harnesses reactive power compensation from MDHD EVs via a metaheuristic algorithm; (3) the mitigation of voltage deviation and power loss on the distribution network while utilizing only 20% of the inverter capacity of MDHD EVs; and (4) the comprehensive evaluation of a range of metaheuristic algorithms across various dimensions, all geared towards improving voltage stability.
The subsequent sections of this paper are structured as follows: in
Section 2, we delve into the problem formulation, which encompasses the system model and optimization objectives. This section also introduces our novel approach rooted in metaheuristic algorithms and includes an overview of each of the algorithms that have been tested.
Section 3 is dedicated to the presentation of the simulation results, and it includes a comprehensive discussion of the evaluated algorithms and their ability to regulate reactive power compensation.
Section 4 concludes the paper and explores future research directions.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





