
Forest Fire Detection and Notification Method Based on AI and IoT Approaches


 , and
, and
Abstract
:1. Introduction
- ○
- Sensors are one of the widely used techniques to determine whether there is a fire or not. We found that just using a smoke detection sensor can lead to false alarms because some of the smells can come from different places or from someone smoking.
- ○
- Remote cameras are used in some of the other fire detection systems to determine whether there is a fire or not. This kind of surveillance requires human employees to continuously monitor the cameras, which can sometimes lead to the employees falling asleep.
- ○
- R-CNN-based approaches are also efficiently used to identify and eliminate fire catastrophes. However, this method might also make errors sometimes and incorrectly classify candidate fire regions as real fires. Therefore, they may also lead to false alarms.
2. Related Work
2.1. Forest Fire Detection Using the Machine-Learning Approach
2.2. Forest Fire Detection Based on the Deep Learning Approach
- The most common method to detect fire is the smoke alarm, which can commonly be found in a lot of projects or even at a store. However, having only smoke sensors can cause false alarms.
- Remote cameras are probably the most common methods used by park rangers. However, these require 24/7 human interactions. This can lead to human errors by falling asleep during a shift.
- R-CNN is now advancing more and more and is being introduced as a product. This allows real-time surveillance and it can detect whether there is a fire or not. This can be very useful in furthering our society in the future.
- The goal of this research is to converge Internet of Things devices with AI methods in the field of global wildfire prevention. Therefore, our research saves lives and government property.
3. Fire Detection Approach
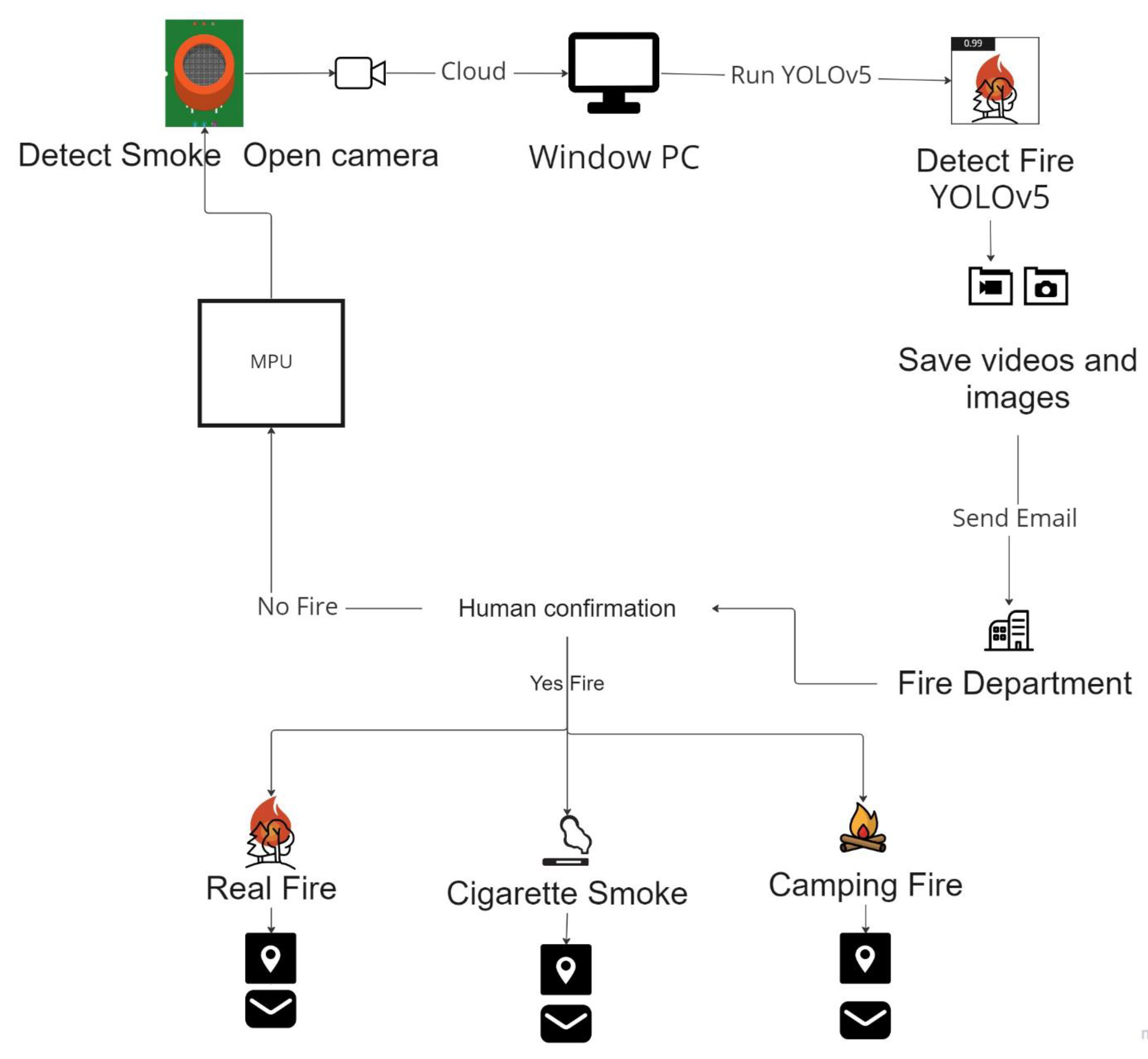
3.1. Proposed High-Level System Architecture
3.2. IoT Devices and Hardware Requirements
- Raspberry Pi 4 or Arduino;
- Raspberry Pi 4 power cable;
- Raspberry Pi 4 Internet cable;
- Solid-state drive (SSD) or hard drive;
- Internet access;
- Desktop Windows 10 Pro (optional/recommended);
- MQ-2 flammable gas & smoke sensor;
- Pin wires;
- Breadboard;
- Camera.
3.3. IoT Devices and Sensor Models
- MQ-2: measures methane, butane, liquefied petroleum gas (LPG), smoke;
- MQ-3: alcohol, ethanol, smoke;
- MQ-4: methane, compressed natural gas (CNG);
- MQ-5: natural gas, LPG;
- MQ-6: LPG, butane;
- MQ-7: carbon monoxide;
- MQ-8: hydrogen gas;
- MQ-9: carbon monoxide, flammable gasses;
- MQ131: ozone;
- MQ135: air quality;
- MQ136: hydrogen sulphide gas;
- MQ137: ammonia;
- MQ138: benzene, toluene, alcohol, propane, formaldehyde gas, hydrogen;
- MQ214: methane, natural gas;
- MQ216: natural gas, coal gas;
- MQ303A: alcohol, ethanol, smoke;
- MQ306A: LPG, butane;
- MQ307A: carbon monoxide;
- MQ309A: carbon monoxide, flammable gas.
3.4. Dataset
3.4.1. Fire Identification
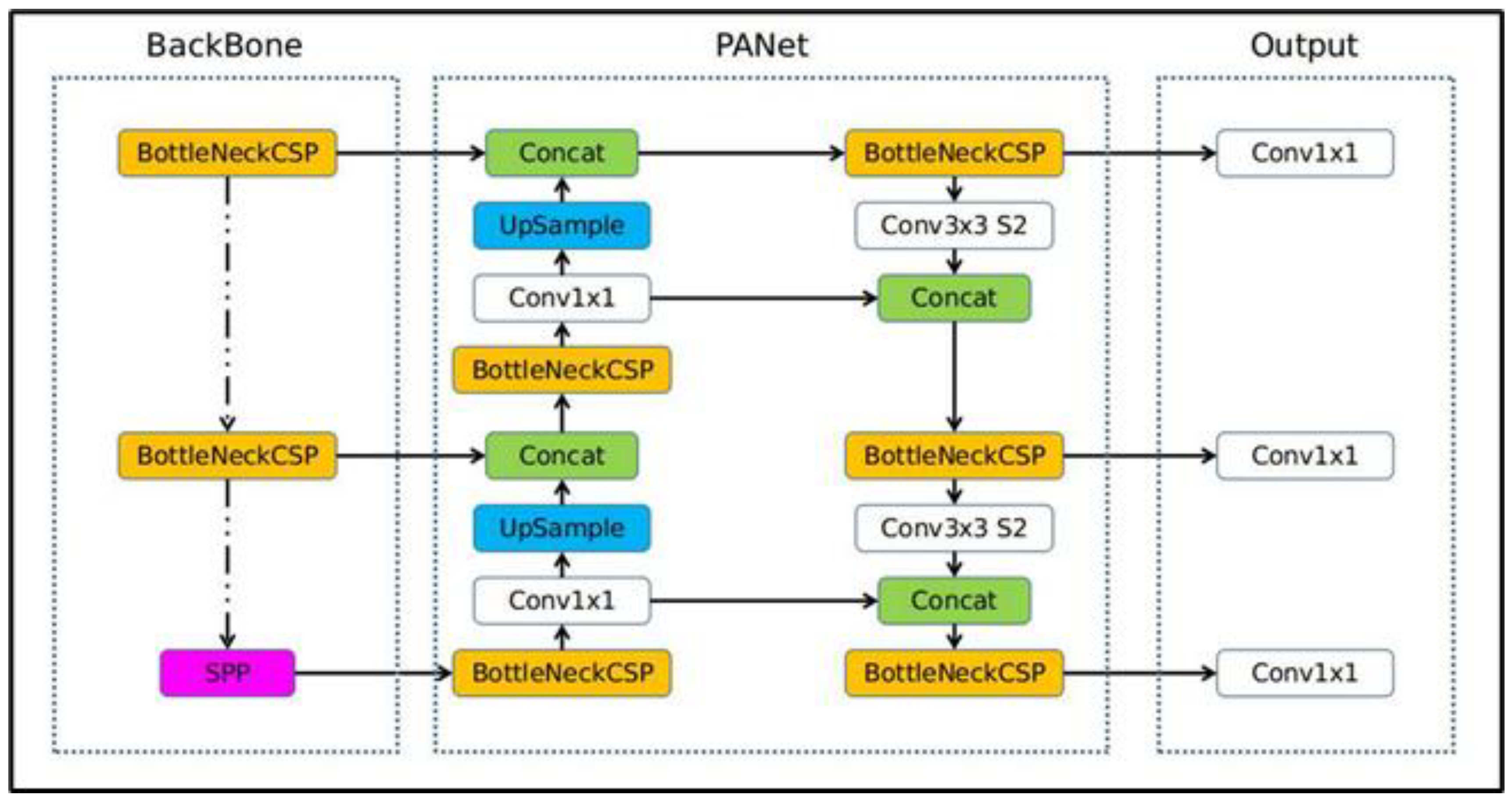
3.4.2. YOLOv5
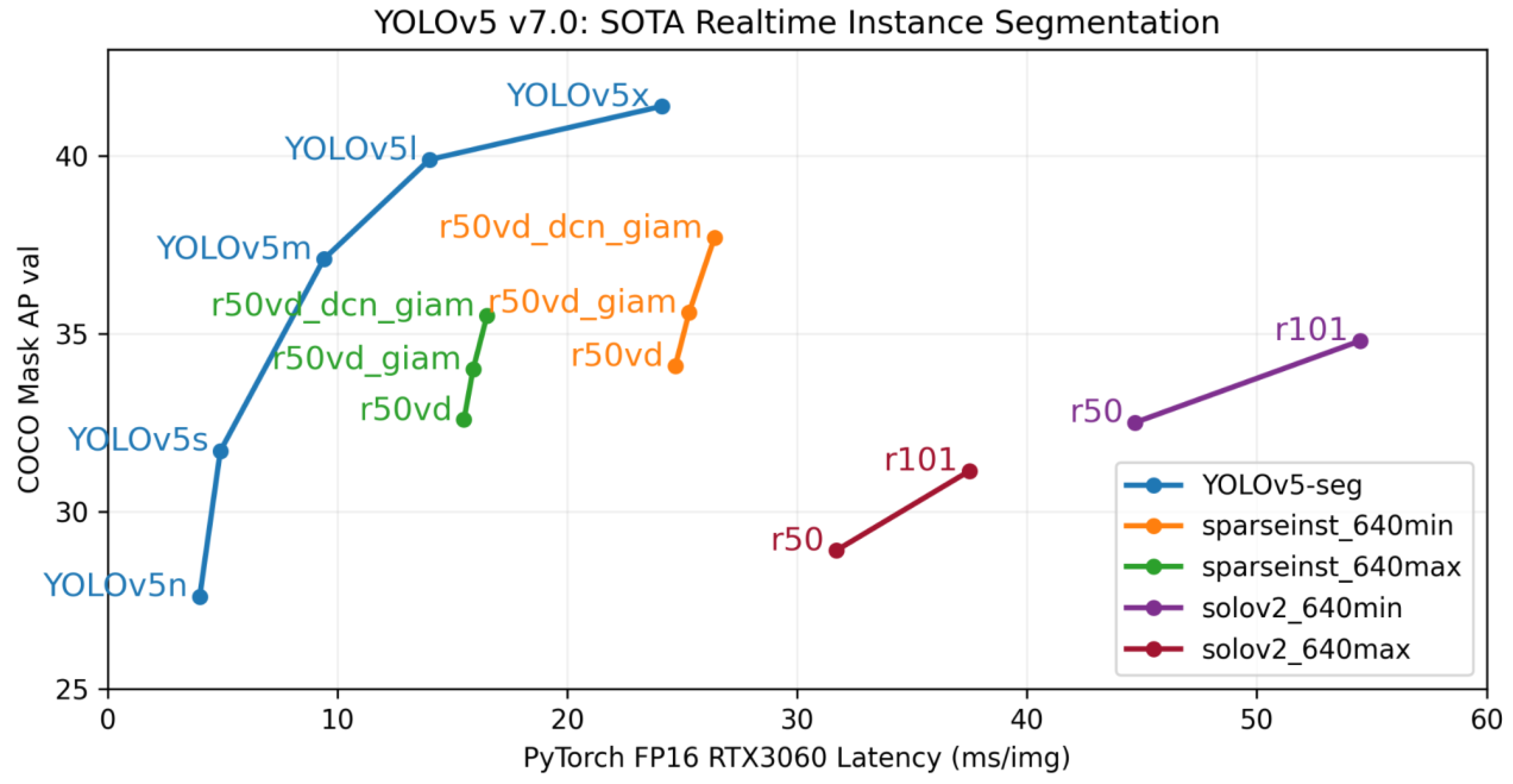
3.4.3. YOLOv5 Series
3.4.4. Fire Department
4. Experimental Results and Discussions
4.1. Environment
4.2. Proof of Concept Experimentation
5. Limitations
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Korea Forest Service 2019, Korea Forest Service Website, Korean Government. Available online: https://english.forest.go.kr (accessed on 10 November 2022).
- Nairobi 2022, Unified Nation Enviroment Programme Website. Available online: https://www.unep.org (accessed on 10 November 2022).
- Korean Statistical Information Service. Available online: http://kosis.kr (accessed on 10 August 2021).
- Mukhiddinov, M.; Muminov, A.; Cho, J. Improved Classification Approach for Fruits and Vegetables Freshness Based on Deep Learning. Sensors 2022, 22, 8192. [Google Scholar] [CrossRef] [PubMed]
- Larsen, A.; Hanigan, I.; Reich, B.J.; Qin, Y.; Cope, M.; Morgan, G.; Rappold, A.G. A deep learning approach to identify smoke plumes in satellite imagery in near-real time for health risk communication. J. Expo. Sci. Environ. Epidemiol. 2021, 31, 170–176. [Google Scholar] [CrossRef] [PubMed]
- Toan, N.T.; Thanh Cong, P.; Viet Hung, N.Q.; Jo, J. A deep learning approach for early wildfire detection from hyperspectral satellite images. In Proceedings of the 2019 7th International Conference on Robot Intelligence Technology and Applications (RiTA), Daejeon, Korea, 1–3 November 2019; pp. 38–45. [Google Scholar] [CrossRef]
- Li, P.; Zhao, W. Image fire detection algorithms based on convolutional neural networks. Case Stud. Therm. Eng. 2020, 19, 100625. [Google Scholar] [CrossRef]
- Tang, Z.; Liu, X.; Chen, H.; Hupy, J.; Yang, B. Deep Learning Based Wildfire Event Object Detection from 4K Aerial Images Acquired by UAS. AI 2020, 1, 166–179. [Google Scholar] [CrossRef]
- Toulouse, T.; Rossi, L.; Celik, T.; Akhloufi, M. Automatic fire pixel detection using image processing: A comparative analysis of rule-based and machine learning-based methods. Signal Image Video Process. 2016, 10, 647–654. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Q.; Wang, Q. Large space fire image processing of improving canny edge detector based on adaptive smoothing. In Proceedings of the 2010 International Conference on Innovative Computing and Communication and 2010 Asia-Pacific Conference on Information Technology and Ocean Engineering, Macao, China, 30–31 January 2010; pp. 264–267. [Google Scholar]
- Celik, T.; Demirel, H.; Ozkaramanli, H.; Uyguroglu, M. Fire detection using statistical color model in video sequences. J. Vis. Commun. Image Represent. 2007, 18, 176–185. [Google Scholar] [CrossRef]
- Dimitropoulos, K.; Barmpoutis, P.; Grammalidis, N. Spatio temporal flame modeling and dynamic texture analysis for automatic video-based fire detection. IEEE Trans. Circuits Syst. Video Technol. 2015, 25, 339–351. [Google Scholar] [CrossRef]
- Park, M.; Ko, B.C. Two-Step Real-Time Night-Time Fire Detection in an Urban Environment Using Static ELASTIC-YOLOv3 and Temporal Fire-Tube. Sensors 2020, 20, 2202. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Abdusalomov, A.B.; Islam, B.M.S.; Nasimov, R.; Mukhiddinov, M.; Whangbo, T.K. An Improved Forest Fire Detection Method Based on the Detectron2 Model and a Deep Learning Approach. Sensors 2023, 23, 1512. [Google Scholar] [CrossRef]
- Muhammad, K.; Ahmad, J.; Mehmood, I.; Rho, S.; Baik, S.W. Convolutional Neural Networks Based Fire Detection in Surveillance Videos. IEEE Access 2018, 6, 18174–18183. [Google Scholar] [CrossRef]
- Pan, H.; Badawi, D.; Cetin, A.E. Computationally Efficient Wildfire Detection Method Using a Deep Convolutional Network Pruned via Fourier Analysis. Sensors 2020, 20, 2891. [Google Scholar] [CrossRef]
- Li, T.; Zhao, E.; Zhang, J.; Hu, C. Detection of Wildfire Smoke Images Based on a Densely Dilated Convolutional Network. Electronics 2019, 8, 1131. [Google Scholar] [CrossRef] [Green Version]
- Kim, B.; Lee, J. A Video-Based Fire Detection Using Deep Learning Models. Appl. Sci. 2019, 9, 2862. [Google Scholar] [CrossRef] [Green Version]
- Wu, S.; Zhang, L. Using popular object detection methods for real time forest fire detection. In Proceedings of the 11th International Symposium on Computational Intelligence and Design (SCID), Hangzhou, China, 8–9 December 2018; pp. 280–284. [Google Scholar]
- Imran; Iqbal, N.; Ahmad, S.; Kim, D.H. Towards Mountain Fire Safety Using Fire Spread Predictive Analytics and Mountain Fire Containment in IoT Environment. Sustainability 2021, 13, 2461. [Google Scholar] [CrossRef]
- Gagliardi, A.; Saponara, S. AdViSED: Advanced Video SmokE Detection for Real-Time Measurements in Antifire Indoor and Outdoor Systems. Energies 2020, 13, 2098. [Google Scholar] [CrossRef] [Green Version]
- Xu, R.; Lin, H.; Lu, K.; Cao, L.; Liu, Y. A Forest Fire Detection System Based on Ensemble Learning. Forests 2021, 12, 217. [Google Scholar] [CrossRef]
- Ren, S.; He, K.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. Adv. Neural Inf. Process. Syst. 2015, 28. [Google Scholar] [CrossRef] [Green Version]
- Liu, W.; Anguelov, D.; Erhan, D.; Szegedy, C.; Reed, S.; Fu, C.-Y.; Berg, A.C. SSD: Single Shot MultiBox Detector. In Computer Vision—ECCV 2016; Leibe, B., Matas, J., Sebe, N., Welling, M., Eds.; ECCV 2016. Lecture Notes in Computer Science; Springer: Cham, Switzerland, 2016; Volume 9905. [Google Scholar] [CrossRef] [Green Version]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You only look once: Unified, real-time object detection. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 779–788. [Google Scholar]
- Abdusalomov, A.; Baratov, N.; Kutlimuratov, A.; Whangbo, T.K. An improvement of the fire detection and classification method using YOLOv3 for surveillance systems. Sensors 2021, 21, 6519. [Google Scholar] [CrossRef]
- Avazov, K.; Mukhiddinov, M.; Makhmudov, F.; Cho, Y.I. Fire Detection Method in Smart City Environments Using a Deep Learning-Based Approach. Electronics 2021, 1, 73. [Google Scholar] [CrossRef]
- Sisias, G.; Konstantinidou, M.; Kontogiannis, S. Deep Learning Process and Application for the Detection of Dangerous Goods Passing through Motorway Tunnels. Algorithms 2022, 15, 370. [Google Scholar] [CrossRef]
- Voudiotis, G.; Moraiti, A.; Kontogiannis, S. Deep Learning Beehive Monitoring System for Early Detection of the Varroa Mite. Signals 2022, 3, 506–523. [Google Scholar] [CrossRef]
- Kontogiannis, S.; Asiminidis, C. A Proposed Low-Cost Viticulture Stress Framework for Table Grape Varieties. IoT 2020, 1, 337–359. [Google Scholar] [CrossRef]
- Ahrens, M.; Maheshwari, R. Home Structure Fires; National Fire Protection Association: Quincy, MA, USA, 2021. [Google Scholar]
- Mukhiddinov, M.; Abdusalomov, A.B.; Cho, J. Automatic Fire Detection and Notification System Based on Improved YOLOv4 for the Blind and Visually Impaired. Sensors 2022, 22, 3307. [Google Scholar] [CrossRef]
- Abdusalomov, A.B.; Mukhiddinov, M.; Kutlimuratov, A.; Whangbo, T.K. Improved Real-Time Fire Warning System Based on Advanced Technologies for Visually Impaired People. Sensors 2022, 22, 7305. [Google Scholar] [CrossRef]
- Robmarkcole 2022, Fire-Detection-from-Images, Github. Available online: https://github.com/robmarkcole/fire-detection-from-images (accessed on 10 November 2022).
- Glenn Jocher 2022, Yolov5, Github. Available online: https://github.com/ultralytics/yolov5 (accessed on 10 November 2022).
- Valikhujaev, Y.; Abdusalomov, A.; Cho, Y.I. Automatic fire and smoke detection method for surveillance systems based on dilated CNNs. Atmosphere 2020, 11, 1241. [Google Scholar] [CrossRef]
- Redmon, J. Darknet: Open-Source Neural Networks in C. 2013–2016. Available online: http://pjreddie.com/darknet/ (accessed on 22 October 2022).
- Bochkovskiy, A.; Wang, C.Y.; Liao, H.Y.M. YOLOv4: Optimal Speed and Accuracy of Object Detection. arXiv 2020, arXiv:2004.10934. [Google Scholar]
- Mukhiddinov, M.; Abdusalomov, A.B.; Cho, J. A Wildfire Smoke Detection System Using Unmanned Aerial Vehicle Images Based on the Optimized YOLOv5. Sensors 2022, 22, 9384. [Google Scholar] [CrossRef] [PubMed]
- Safarov, F.; Temurbek, K.; Jamoljon, D.; Temur, O.; Chedjou, J.C.; Abdusalomov, A.B.; Cho, Y.-I. Improved Agricultural Field Segmentation in Satellite Imagery Using TL-ResUNet Architecture. Sensors 2022, 22, 9784. [Google Scholar] [CrossRef]
- Sharma, A. Training the YOLOv5 Object Detector on a Custom Dataset. 2022. Available online: https://pyimg.co/fq0a3 (accessed on 22 October 2022).
- Ayvaz, U.; Gürüler, H.; Khan, F.; Ahmed, N.; Whangbo, T. Automatic speaker recognition using mel-frequency cepstral coefficients through machine learning. Comput. Mater. Contin. 2022, 71, 5511–5521. [Google Scholar] [CrossRef]
- Nodirov, J.; Abdusalomov, A.B.; Whangbo, T.K. Attention 3D U-Net with Multiple Skip Connections for Segmentation of Brain Tumor Images. Sensors 2022, 22, 6501. [Google Scholar] [CrossRef]
- Abdusalomov, A.; Whangbo, T.K. An improvement for the foreground recognition method using shadow removal technique for indoor environments. Int. J. Wavelets Multiresolut. Inf. Process. 2017, 15, 1750039. [Google Scholar] [CrossRef]
- AlZoman, R.M.; Alenazi, M.J.F. A Comparative Study of Traffic Classification Techniques for Smart City Networks. Sensors 2021, 21, 4677. [Google Scholar] [CrossRef] [PubMed]
- Pereira, F.; Correia, R.; Pinho, P.; Lopes, S.I.; Carvalho, N.B. Challenges in Resource-Constrained IoT Devices: Energy and Communication as Critical Success Factors for Future IoT Deployment. Sensors 2020, 20, 6420. [Google Scholar] [CrossRef] [PubMed]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Training Images | Testing Images | Total |
|---|---|---|---|
| Robmarkcole | 1155 | 337 | 1492 |
| Glenn-Jocher | 1500 | 128 | 1628 |
| Hardware | Detailed Specifications |
|---|---|
| Processor | Broadcom BCM2711, quad-core Cortex-A72 (ARM v8) 64-bit SoC @ 1.5GHz |
| Memory | 1GB, 2GB, 4GB or 8GB LPDDR4 |
| Connectivity | 2.4 GHz and 5.0 GHz IEEE 802.11ac wireless, Bluetooth 5.0, BLE Gigabit Ethernet 2 USB 3.0 ports; 2 USB 2.0 ports. |
| GPIO | 40 pin GPIO header |
| Camera | Webcam logitech c920 |
| Storage | SSD 120GB |
| Operating System | Raspberry Pi OS |
| Power | 5V 3A 1.5M |
| Processor | Intel i7 8700K 3.70GHz |
| Memory | 32GB DDR4 |
| Local Area Network | Internal port—10/100 Mbps External port—10/100 Mbps |
| GPU | 1080 ASUS |
| Motherboard | TUF Z390-PLUS GAMING |
| Storage | 500 GB M.2, 1TB SSD, 4TB Hard Drive |
| Operating System | Windows 10 Pro |
| Power | SuperFlower SF-1000 Watt |
| Criterion | Improved YOLOv3 [26] | Improved YOLOv4 [27] | Improved YOLOv4 BVI [33] | Proposed Method |
|---|---|---|---|---|
| Scene Independence | standard | robust | standard | robust |
| Object Independence | standard | robust | robust | standard |
| Robust to Noise | powerless | robust | standard | robust |
| Robust to Color | standard | standard | powerless | robust |
| Small Fire Detection | robust | standard | robust | powerless |
| Multiple Fire Identification | standard | powerless | powerless | robust |
| Processing Time | powerless | standard | robust | robust |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Avazov, K.; Hyun, A.E.; Sami S, A.A.; Khaitov, A.; Abdusalomov, A.B.; Cho, Y.I. Forest Fire Detection and Notification Method Based on AI and IoT Approaches. Future Internet 2023, 15, 61. https://doi.org/10.3390/fi15020061
Avazov K, Hyun AE, Sami S AA, Khaitov A, Abdusalomov AB, Cho YI. Forest Fire Detection and Notification Method Based on AI and IoT Approaches. Future Internet. 2023; 15(2):61. https://doi.org/10.3390/fi15020061
Chicago/Turabian StyleAvazov, Kuldoshbay, An Eui Hyun, Alabdulwahab Abrar Sami S, Azizbek Khaitov, Akmalbek Bobomirzaevich Abdusalomov, and Young Im Cho. 2023. "Forest Fire Detection and Notification Method Based on AI and IoT Approaches" Future Internet 15, no. 2: 61. https://doi.org/10.3390/fi15020061