
Filtering Photon Cloud Data in Forested Areas Based on Elliptical Distance Parameters and Machine Learning Approach


Abstract
:1. Introduction
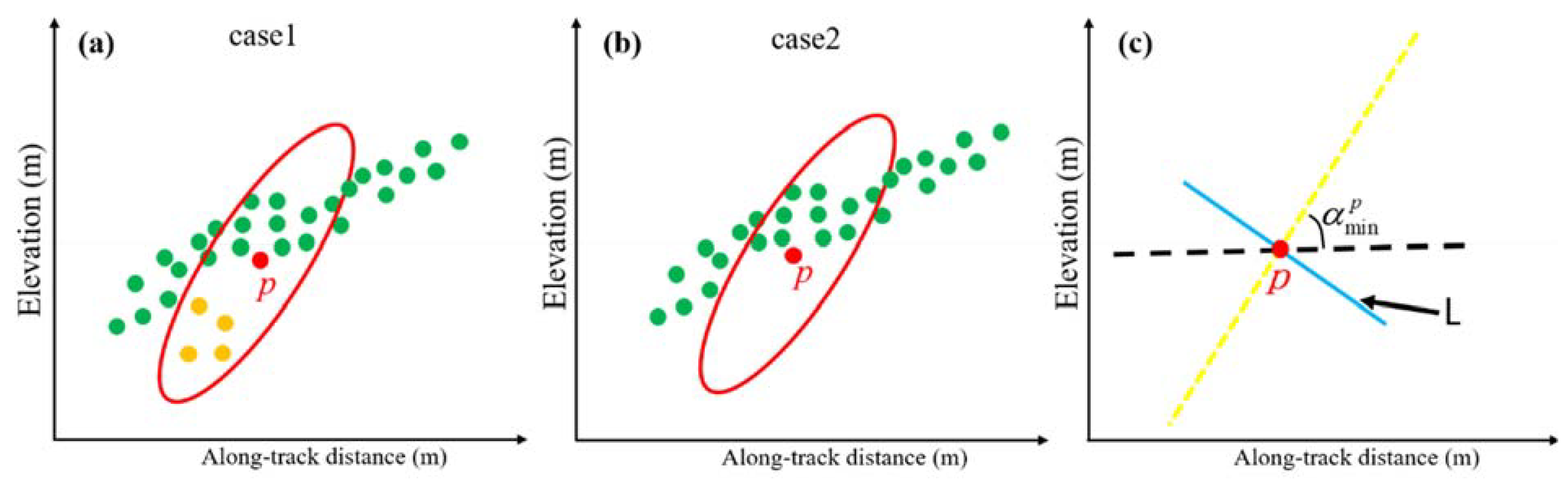
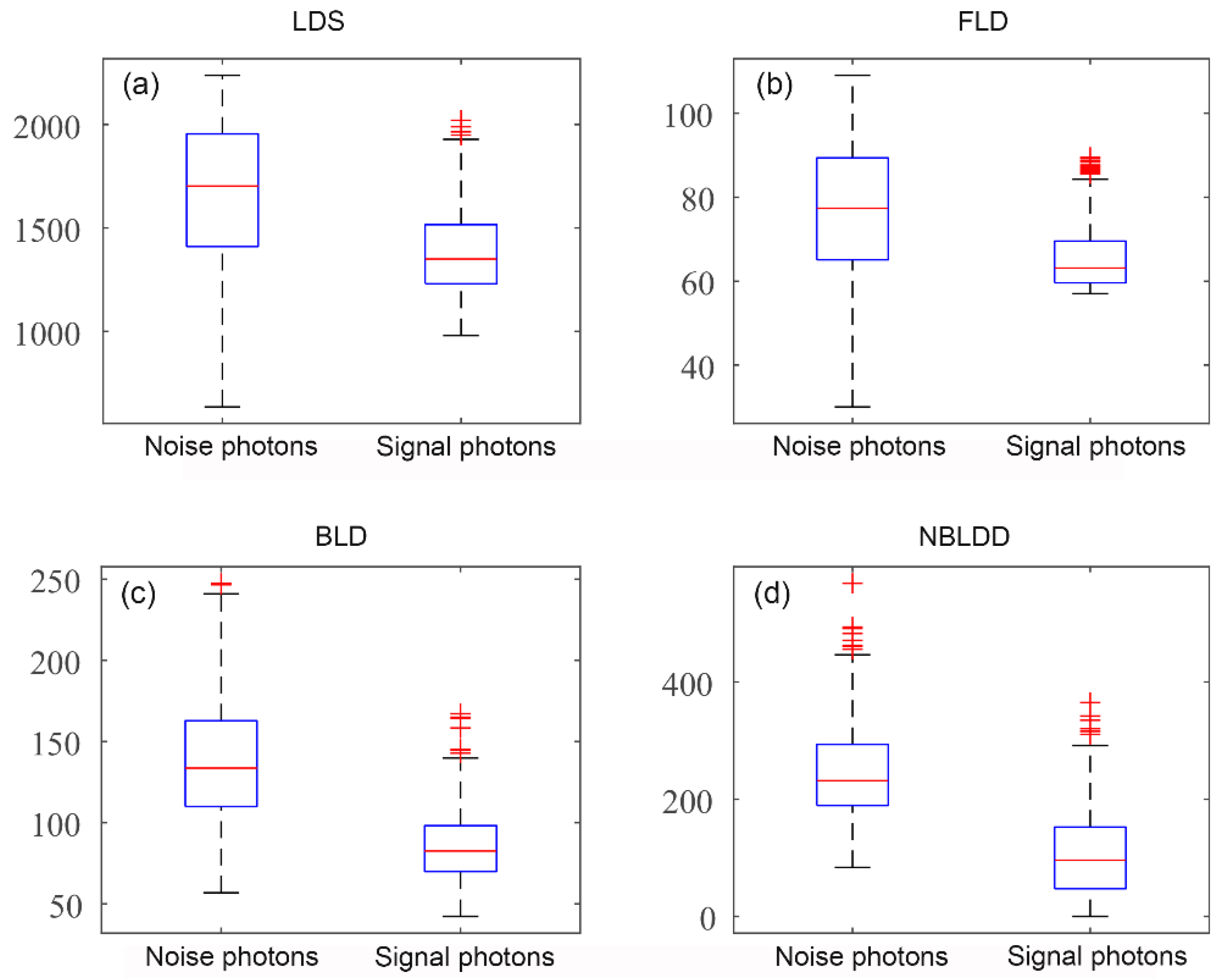
- We define the FLD to better distinguish signal photons and noise photons far away from signal photons. In addition, we define the neighboring forward local density difference (NFLDD) to retain some signal photons that can be easily recognized as noise photons by the BLD parameter.
- The above two statistical parameters are defined to express the spatial density difference in photon clouds together with the BLD. Therefore, different types of photon clouds can be better expressed by three parameters rather than a single parameter.
- The machine learning approach is used to combine the FLD, BLD, and NFLDD attribute parameters; it is possible to distinguish the noise and signal photons without depending on any statistical model or threshold.
2. Materials and Methods
2.1. Photon Cloud Datasets
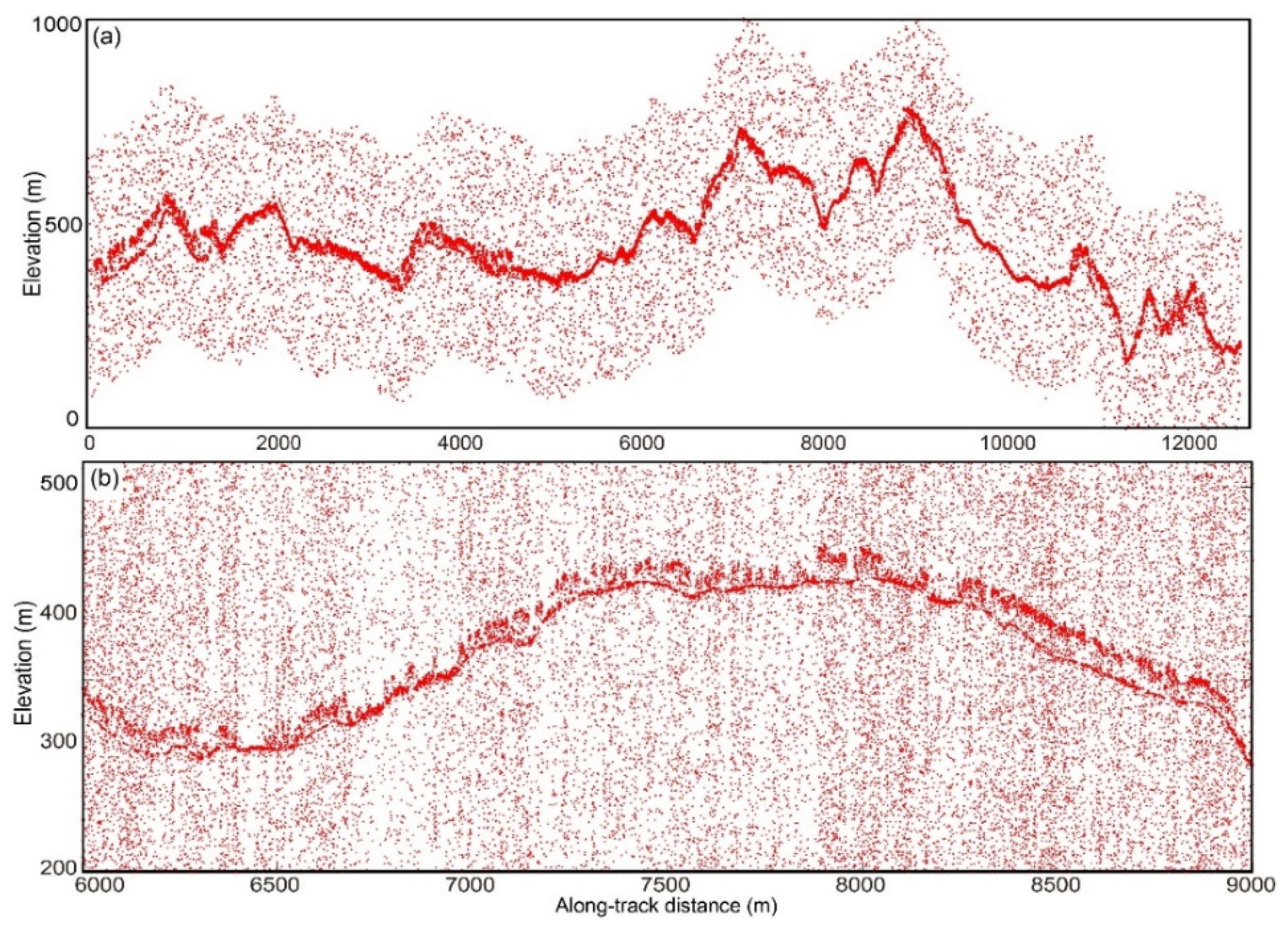
2.1.1. Airborne Photon Cloud Datasets and Test Sites
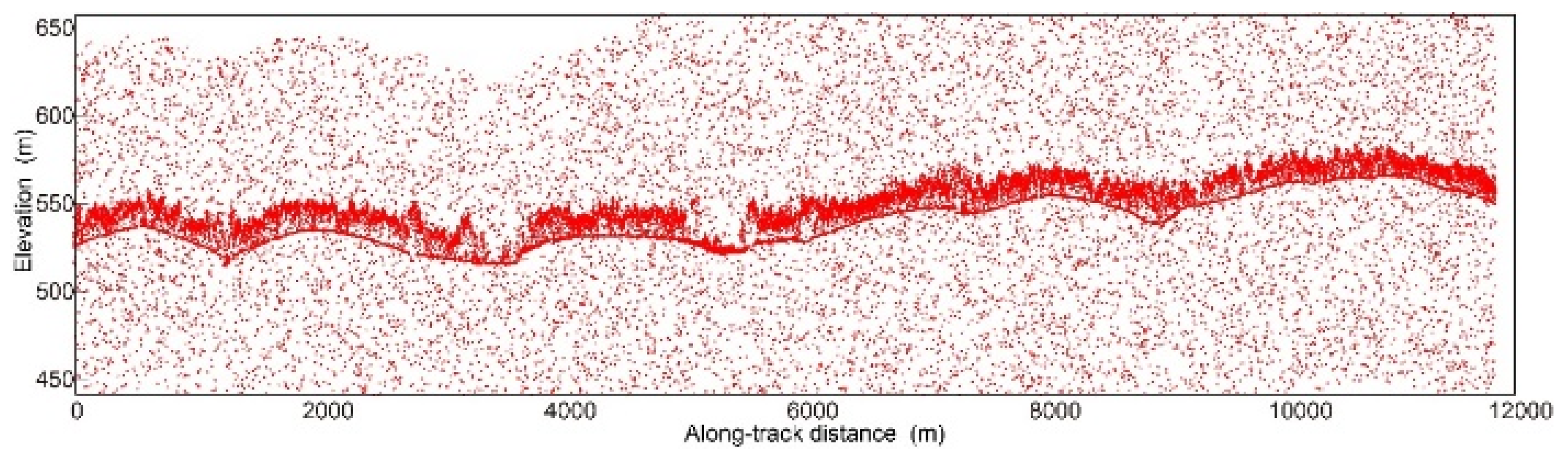
2.1.2. ICESat-2 Dataset and Test Site
2.1.3. Validation Data
2.2. Elliptical Distance-Based Filtering Parameters
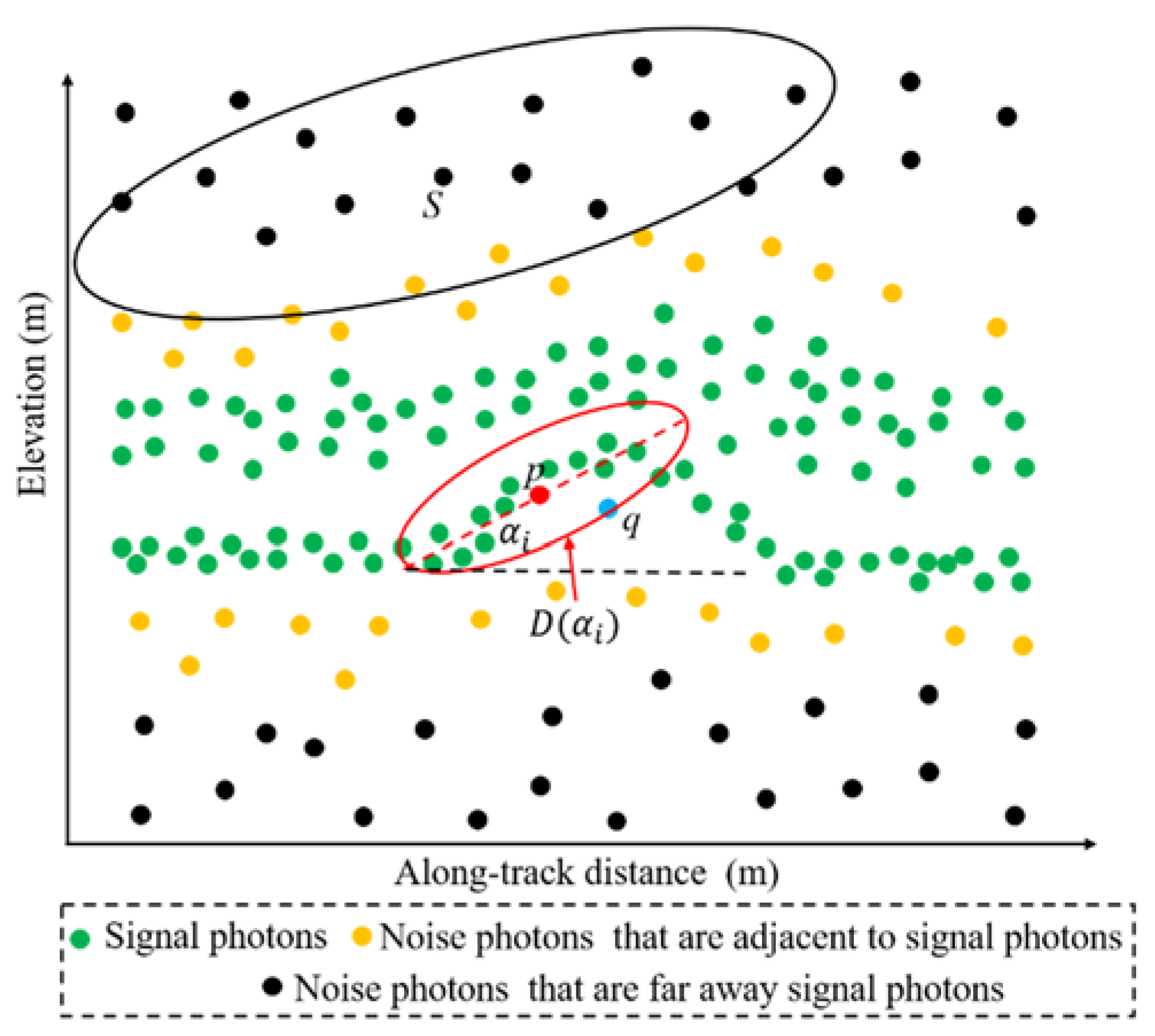
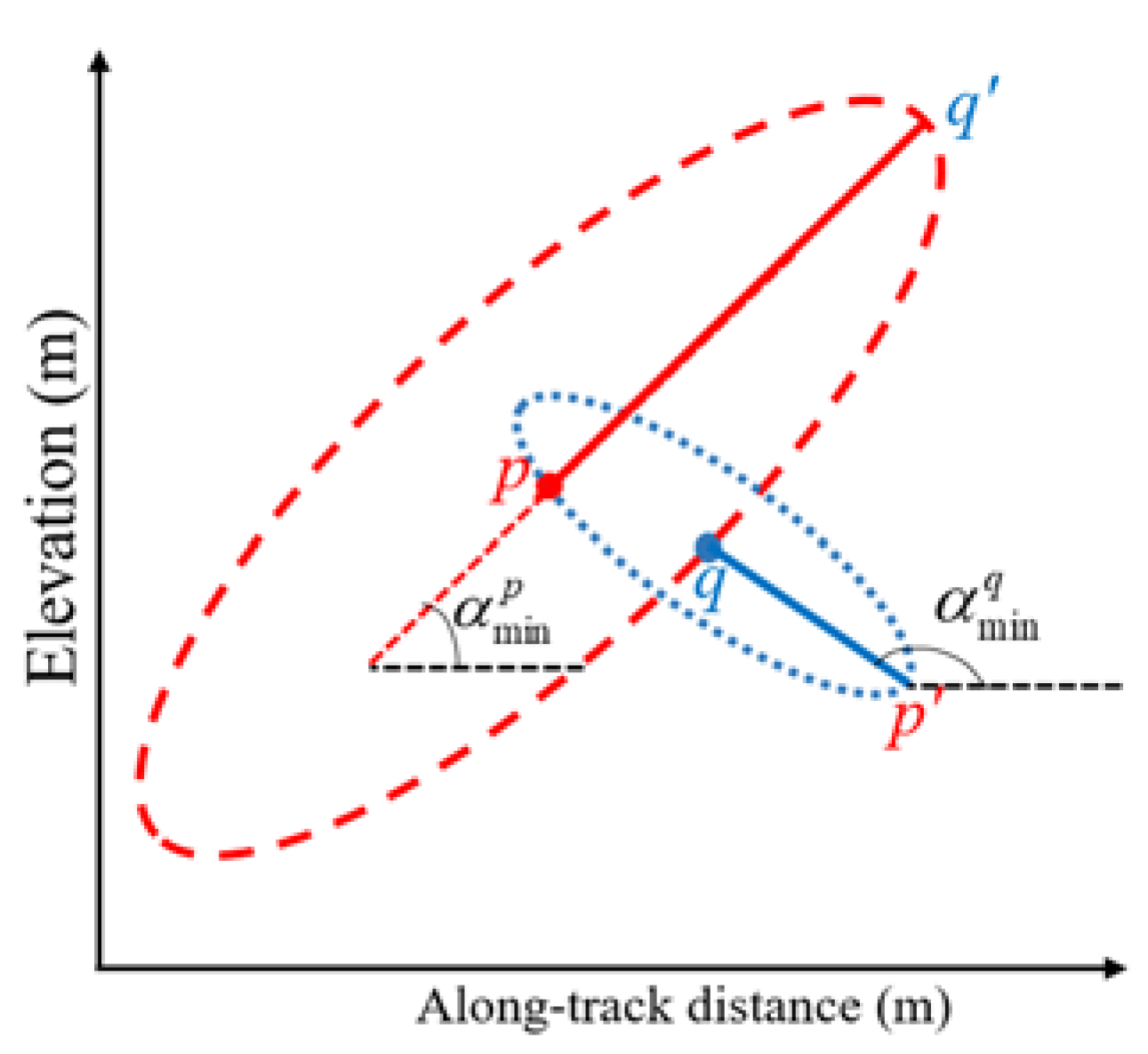
2.2.1. Forward Elliptical Distance and Forward Local Density
2.2.2. Backward Elliptical Distance and Backward Local Density
2.2.3. The Neighboring forward Local Density Difference
2.3. Filtering Method Based on Machine Learning Approach
2.3.1. Machine Learning Approach
2.3.2. Filtering Progress
- (1)
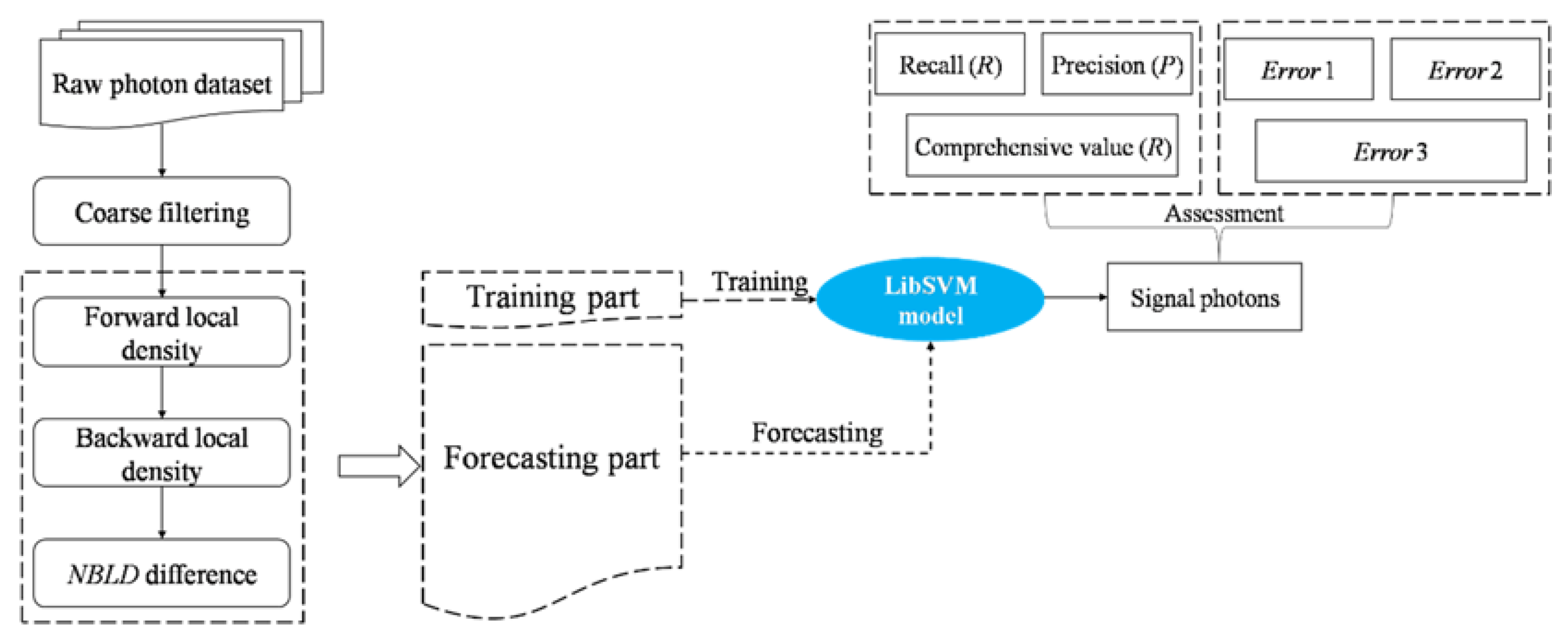
- Photon cloud coordinate system conversion: We convert the raw photon cloud data under the WGS-84 coordinate system to the Universal Transverse Mercator Grid System (UTM). The distance between all photon points and the starting photon is calculated along with the track distance (m); therefore, the elevation of photon cloud data is rearranged according to these distances.
- (2)
- Coarse filtering: The coarse filtering procedure is used to remove the noise photons that are far away from the signal photons, which can improve the computational efficiency [9]. The main steps are as follows. First, the original photon cloud data are divided into multiple parts with a size of X meters along the flight direction and Z meters along the vertical direction. Subsequently, along the vertical direction, the number of photons in each grid cell is counted and the grid cell with the most photons is regarded as the grid cell containing the signal photons. To ensure that no signal photons are omitted, two or four neighboring grid cells of the selected grid cell along the vertical direction are also selected.
- (3)
- Training sample selection: Before performing the filtering process, the noise photon samples far away from signal photons, the signal photon samples, and the noise photon samples adjacent to signal photons should be provided to find the relationship between the photon types and the proposed elliptical parameters (FLD, BLD, and NFLDD) by LiBSVM. In this study, we build the filtering model and assess the performance of the filtering method by cross-validation. In detail, for the three experiments, only 3–6% of the total photons are randomly selected for training, and the rest 94–97% of the total photons are used for testing the proposed method. To achieve this goal, the three kinds of photons are randomly selected by artificial classification. Regarding the selection of training samples, we roughly divide the photons into three types according to the histogram statistics of the three defined parameters of the photon cloud. In addition, some training samples are then randomly selected. These preliminarily selected samples inevitably have errors; therefore, we remove all the obviously wrong sample points through visual interpretation. Through the above steps, the training samples can be selected semiautomatically.
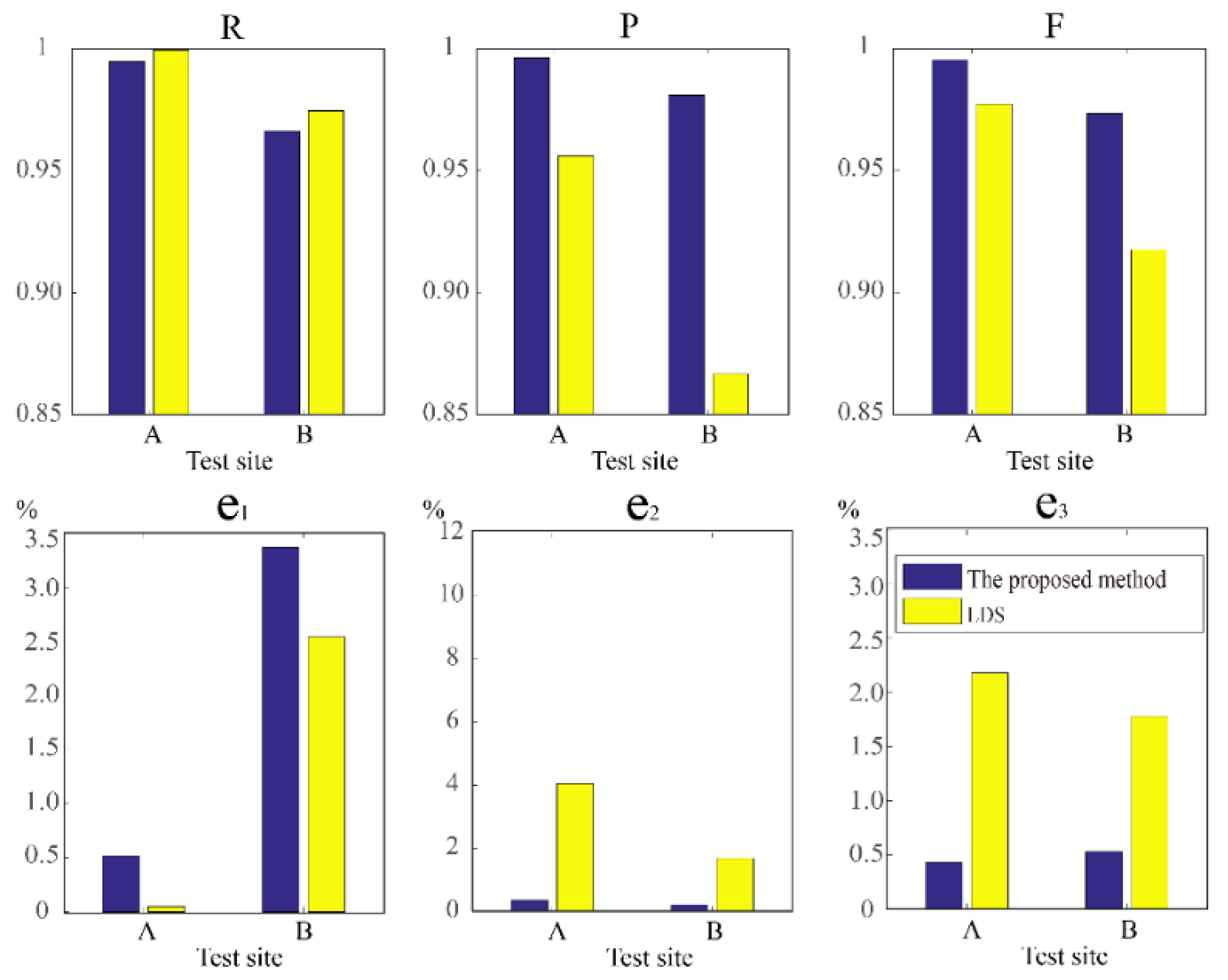
2.3.3. Accuracy Indicators
3. Results
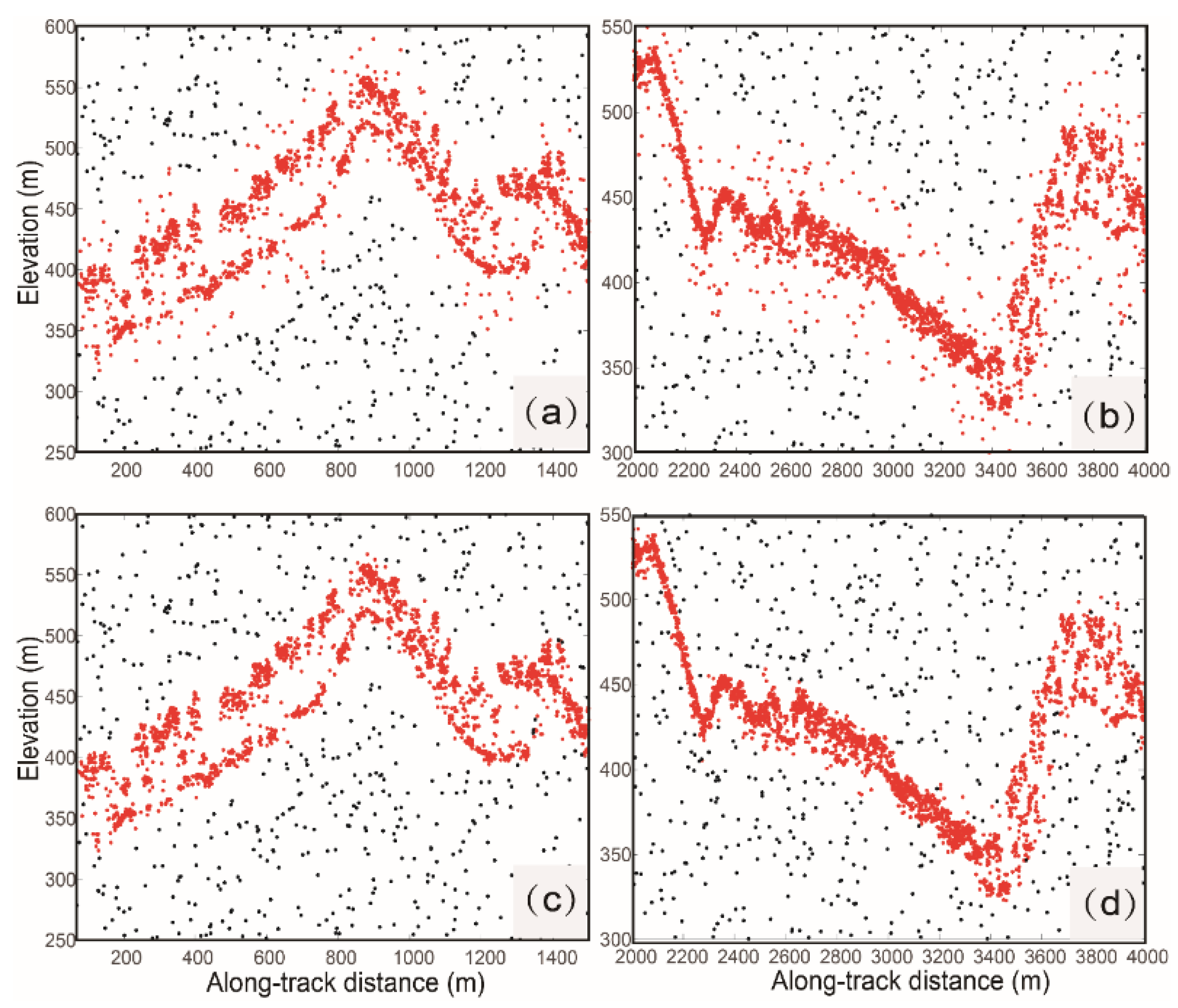
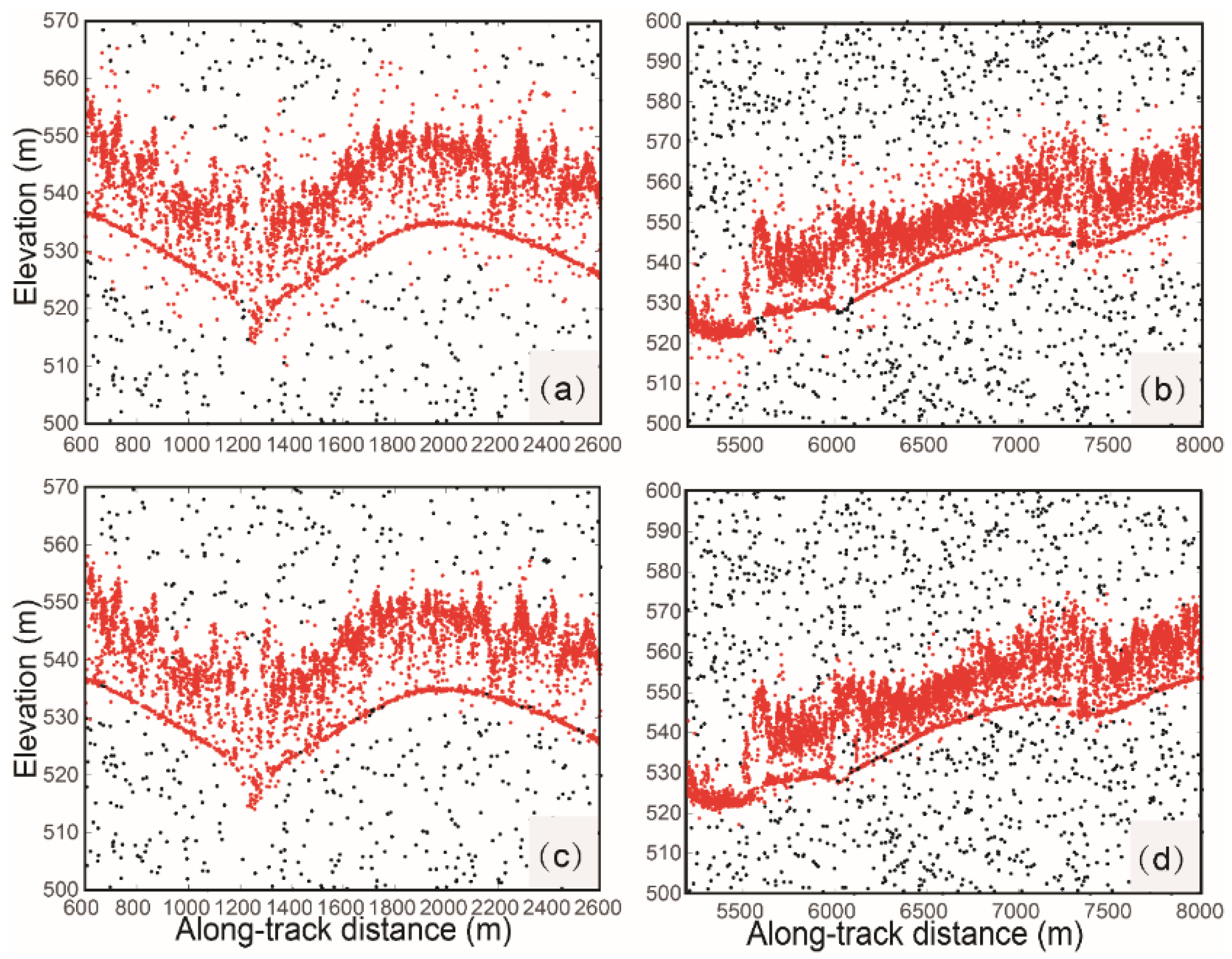
3.1. Performance Assessment on Airborne Photon Cloud Data
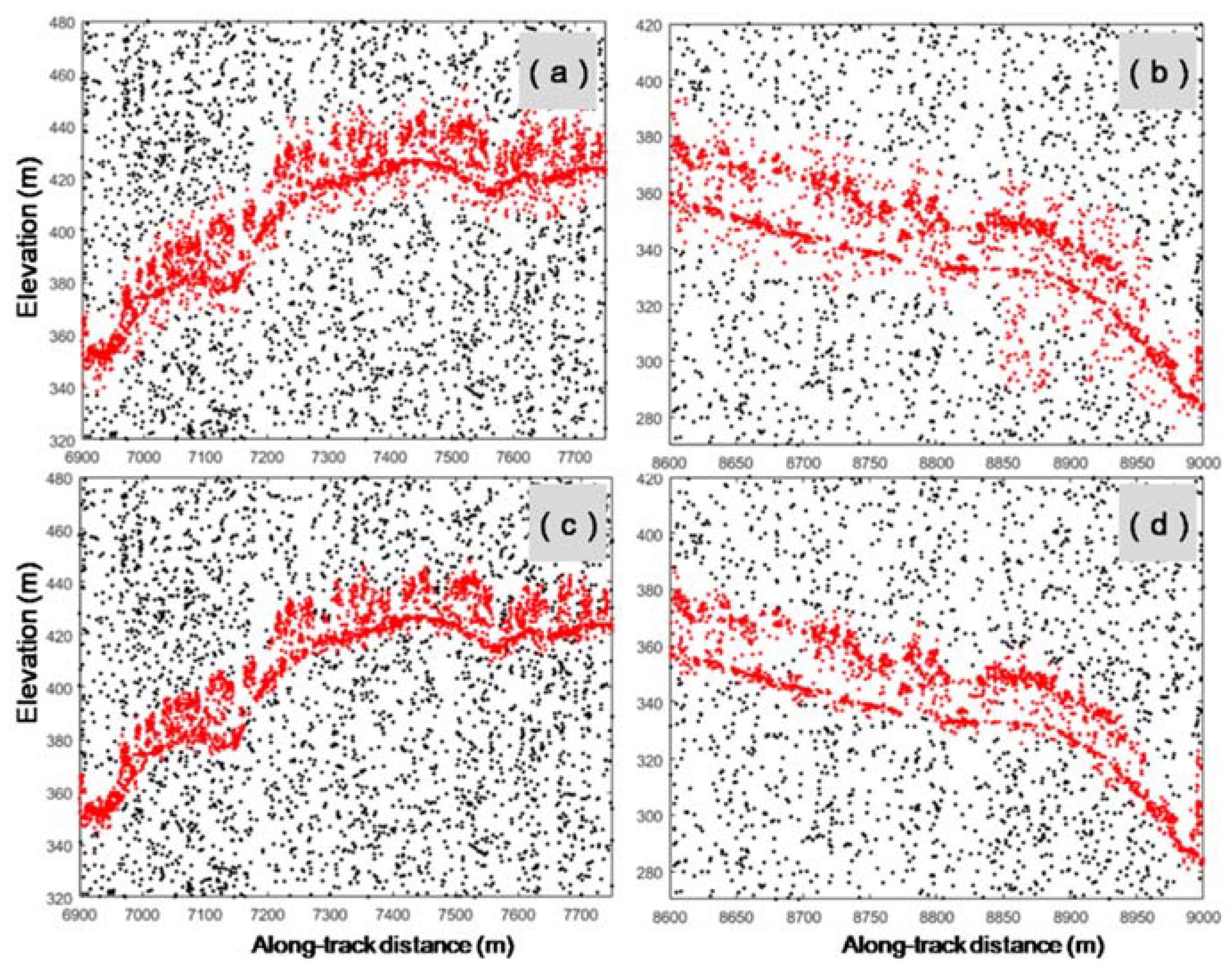
3.2. Performance Assessment on ICESat-2 Data
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Markus, T.; Neumann, T.; Martino, A.; Abdalati, W.; Brunt, K.; Csatho, B.; Farrell, S.; Fricker, H.; Gardner, A.; Harding, D.; et al. The ice, cloud, and land elevation satellite-2 (ICESat-2): Science requirements, concept, and implementation. Remote Sens. Environ. 2017, 190, 260–273. [Google Scholar] [CrossRef]
- Gwenzi, D.; Lefsky, M.A.; Suchdeo, V.P.; Harding, D.J. Prospects of the ICESat-2 laser altimetry mission for savanna ecosystem structural studies based on airborne simulation data. ISPRS J. Photogramm. Remote Sens. 2016, 118, 68–82. [Google Scholar] [CrossRef]
- Magruder, L.A.; Brunt, K.M. Performance analysis of airborne photon-counting lidar data in preparation for the ICESat-2 mission. IEEE Trans. Geosci. Remote Sens. 2018, 56, 2911–2918. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Magruder, L. The Potential Impact of Vertical Sampling Uncertainty on ICESat2/ATLAS Terrain and Canopy Height Retrievals for Multiple Ecosystems. Remote Sens. 2016, 12, 1039. [Google Scholar] [CrossRef] [Green Version]
- Brown, M.E.; Arias, S.D.; Neumann, N.; Jasinski, M.F.; Posey, P.B.; Greg, G.; Nancy, F.B.; Charon, M.E.; Vanessa, M.; Markus, T. Applications for ICESat-2 data: From NASA’s early adopter program. IEEE Geosc. Remote Sens. M. 2016, 4, 24–27. [Google Scholar] [CrossRef]
- Tang, H.; Swatantran, A.; Barrett, T.; Decola, P.; Dubayah, R.J.R.S. Voxel-based spatial filtering method for canopy height retrieval from airborne single-photon lidar. Remote Sens. 2016, 9, 771. [Google Scholar] [CrossRef] [Green Version]
- Magruder, L.A.; Wharton, M.E.; Stout, K.D.; Neuenschwander, A.L. Noise filtering techniques for photon-counting lidar data. Proc. SPIE Int. Soc. Opt. Eng. 2012, 8379, 24. [Google Scholar]
- Wang, X.; Pan, Z.; Glennie, C. A Novel Noise Filtering Model for Photon-Counting Laser Altimeter Data. IEEE Geosci. Remote Sens. Lett. 2016, 13, 947–951. [Google Scholar] [CrossRef]
- Popescu, S.C.; Zhou, T.; Nelson, R.; Neuenschwander, A.; Sheridan, R.; Narine, L.; Walsh, K.M. Photon counting LiDAR: An adaptive ground and canopy height retrieval algorithm for ICESat-2 data. Remote Sens. Environ. 2018, 208, 154–170. [Google Scholar] [CrossRef]
- Huang, J.; Xing, Y.; You, H.; Qin, L.; Tian, J.; Ma, J. Particle Swarm Optimization-Based Noise Filtering Algorithm for Photon Cloud Data in Forest Area. Remote Sens. 2019, 11, 980. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Li, S.; Tian, X.; Zhang, Z.Y.; Zhang, W.H. An adaptive directional model for estimating vegetation canopy height using space-borne photon counting laser altimetry data. J. Infrared. Millim. W 2020, 39, 363–373. [Google Scholar]
- Ma, Y.; Zhang, W.; Sun, J.; Li, G.; Wang, X.H.; Li, S.; Xu, N. Photon-Counting Lidar: An Adaptive Signal Detection Method for Different Land Cover Types in Coastal Areas. Remote Sens. 2019, 11, 471. [Google Scholar] [CrossRef] [Green Version]
- Zhu, X.X.; Nie, S.; Wang, C.; Hu, Z. A Ground Elevation and Vegetation Height Retrieval Method Using Micro-Pulse Photon-Counting Lidar Data. Remote Sens. 2018, 12, 1962. [Google Scholar] [CrossRef] [Green Version]
- Xia, S.B.; Wang, C.; Xi, X.X.; Luo, S.; Zeng, H. Point cloud filtering and tree height estimation using airborne experiment data of ICESat-2. J. Remote Sens. 2014, 18, 1199–1207. [Google Scholar]
- Li, Y.; Fu, H.; Zhu, J.; Wang, C. A Filtering Method for ICESat-2 Photon Point Cloud Data Based on Relative Neighboring Relationship and Local Weighted Distance Statistics. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1891–1895. [Google Scholar] [CrossRef]
- Zhang, J.; Kerekes, J. An Adaptive Density-Based Model for Extracting Surface Returns From Photon-Counting Laser Altimeter Data. IEEE Geosci. Remote Sens. Lett. 2015, 12, 726–730. [Google Scholar] [CrossRef]
- Chen, B.W.; Pang, Y.; Li, Z.Y.; Lu, H.; Liu, L.; North, P.R.J.; Rosette, J.A.B. Ground and top extraction from surface returns from photon-counting LiDAR data using local outlier factor with ellipse searching area. IEEE Geosci. Remote Sens. Lett. 2019, 16, 1447–1451. [Google Scholar] [CrossRef] [Green Version]
- Herzfeld, U.P.D.; McDonald, B.W.; Wallin, B.F.; Neumann, T.A.; Markus, T.; Brenner, A.; Field, C. Algorithm for Detection of Ground and Canopy Cover in Micropulse Photon-Counting Lidar Altimeter Data in Preparation for the ICESat-2 Mission. IEEE Trans. Geosci. Remote Sens. 2014, 52, 2109–2125. [Google Scholar] [CrossRef]
- Neuenschwander, A.; Magruder, L.A. Canpoy and terrain height retrievals with ICESat-2: A first look. Remote Sens. 2019, 11, 1721. [Google Scholar] [CrossRef] [Green Version]
- Nie, S.; Wang, C.; Xi, X.; Luo, S.; Li, G.; Tian, J.; Wang, H. Estimating the vegetation canopy height using micro-pulse photon-counting LiDAR data. Opt. Express 2018, 26, A520–A540. [Google Scholar] [CrossRef]
- Yang, P.; Fu, H.; Zhu, J.; Li, Y.; Wang, C. An Elliptical Distance Based Photon Point Cloud Filtering Method in Forest Area. IEEE Geosci. Remote Sens. Lett. 2021, 19, 1–5. [Google Scholar] [CrossRef]
- Zhu, X.; Nie, S.; Wang, C.; Xi, X.; Wang, J.; Li, D.; Zhou, H. A Noise Removal Algorithm Based on OPTICS for Photon-Counting LiDAR Data. IEEE Geosci. Remote Sens. Lett. 2020, 18, 1471–1475. [Google Scholar] [CrossRef]
- Martin, D.R.; Fowlkes, C.C.; Malik, J. Learning to detect natural image boundaries using local brightness, color, and texture cues. IEEE Trans. Pattern Anal. Mach. Intell. 2004, 26, 530–549. [Google Scholar] [CrossRef] [PubMed]
- Wang, M.; Tseng, Y.-H. Automatic Segmentation of Lidar Data into Coplanar Point Clusters Using an Octree-Based Split-and-Merge Algorithm. Photogramm. Eng. Remote Sens. 2010, 76, 407–420. [Google Scholar] [CrossRef]
- McGill, M.; Markus, T.; Scott, V.S.; Neumann, T. The multiple altimeter beam experimental lidar (MABEL): An airborne simulator for the ICESat-2 mission. J. Atmos. Ocean. Technol. 2013, 30, 345–352. [Google Scholar] [CrossRef]
- Brunt, K.M.; Neumann, T.A.; Amundson, J.M.; Kavanaugh, J.L.; Moussavi, M.S.; Walsh, K.M.; Cook, W.B.; Markus, T. MABEL photon-counting laser altimetry data in Alaska for ICESat-2 simulations and development. Cryosphere 2016, 10, 1707–1719. [Google Scholar] [CrossRef] [Green Version]
- Chang, C.-C.; Lin, C.-J. Training v-Support Vector Classifiers: Theory and Algorithms. Neural Comput. 2001, 13, 2119–2147. [Google Scholar] [CrossRef]
- Chang, C.C.; Lin, C.J. LIBSVM: A library for support vector machines. ACM Trans. Intell. Syst. Technol. 2011, 2, 1–27. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy Indicators | The Proposed Method | LDS |
|---|---|---|
| R | 0.9977 | 0.9963 |
| P | 0.9886 | 0.9596 |
| F | 0.9931 | 0.9776 |
| e1 (%) | 0.23 | 0.37 |
| e2 (%) | 3.13 | 11.29 |
| e3 (%) | 1.01 | 3.33 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, Y.; Zhu, J.; Fu, H.; Gao, S.; Wang, C. Filtering Photon Cloud Data in Forested Areas Based on Elliptical Distance Parameters and Machine Learning Approach. Forests 2022, 13, 663. https://doi.org/10.3390/f13050663
Li Y, Zhu J, Fu H, Gao S, Wang C. Filtering Photon Cloud Data in Forested Areas Based on Elliptical Distance Parameters and Machine Learning Approach. Forests. 2022; 13(5):663. https://doi.org/10.3390/f13050663
Chicago/Turabian StyleLi, Yi, Jun Zhu, Haiqiang Fu, Shijuan Gao, and Changcheng Wang. 2022. "Filtering Photon Cloud Data in Forested Areas Based on Elliptical Distance Parameters and Machine Learning Approach" Forests 13, no. 5: 663. https://doi.org/10.3390/f13050663