

Mechanical Properties of Wood Prediction Based on the NAGGWO-BP Neural Network

Abstract
:1. Introduction
2. The NAGGWO-BP Neural Network Prediction Model
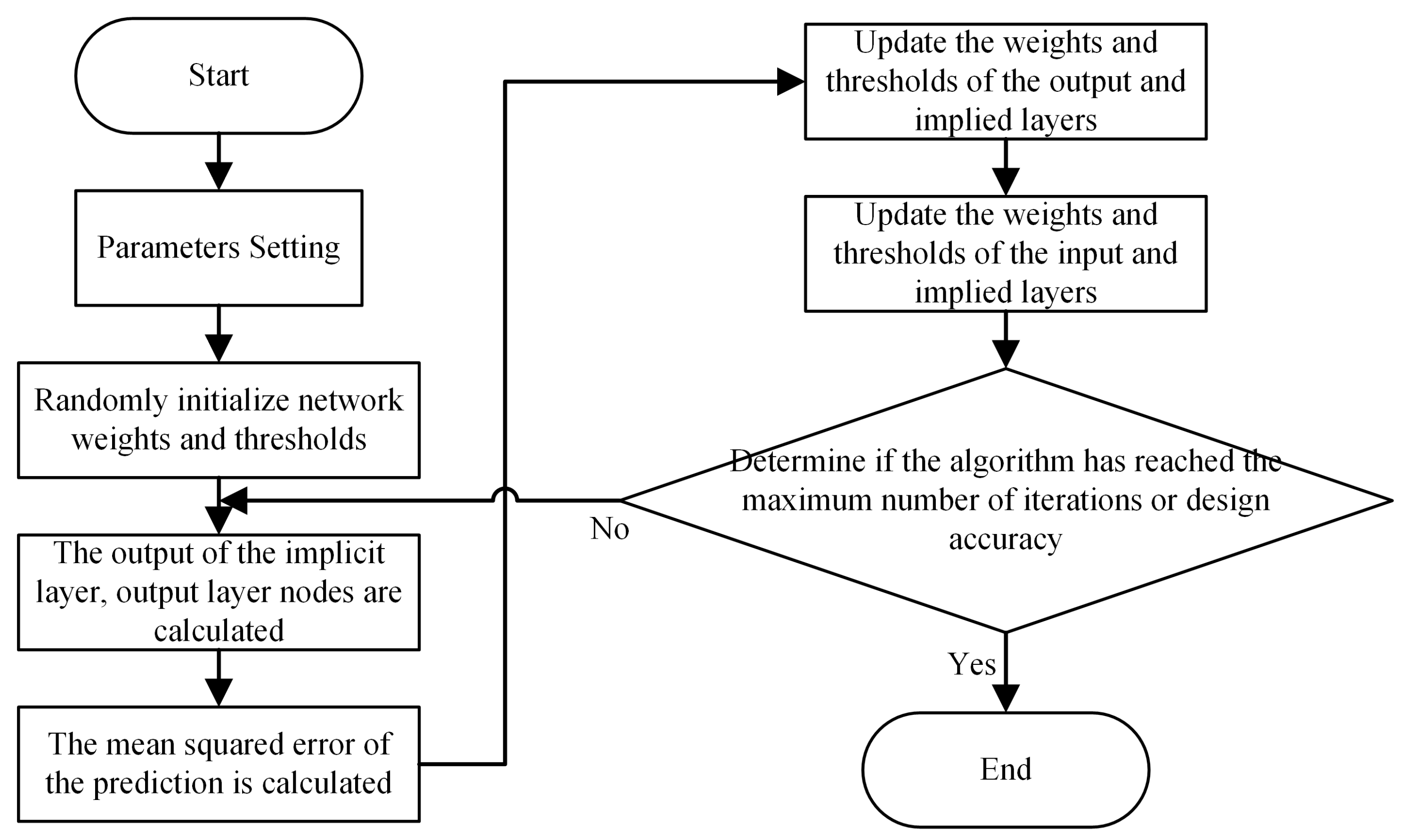
2.1. The Principle of BP Neural Network
2.2. The Traditional GWO Algorithm
2.3. The NAGGWO Algorithm
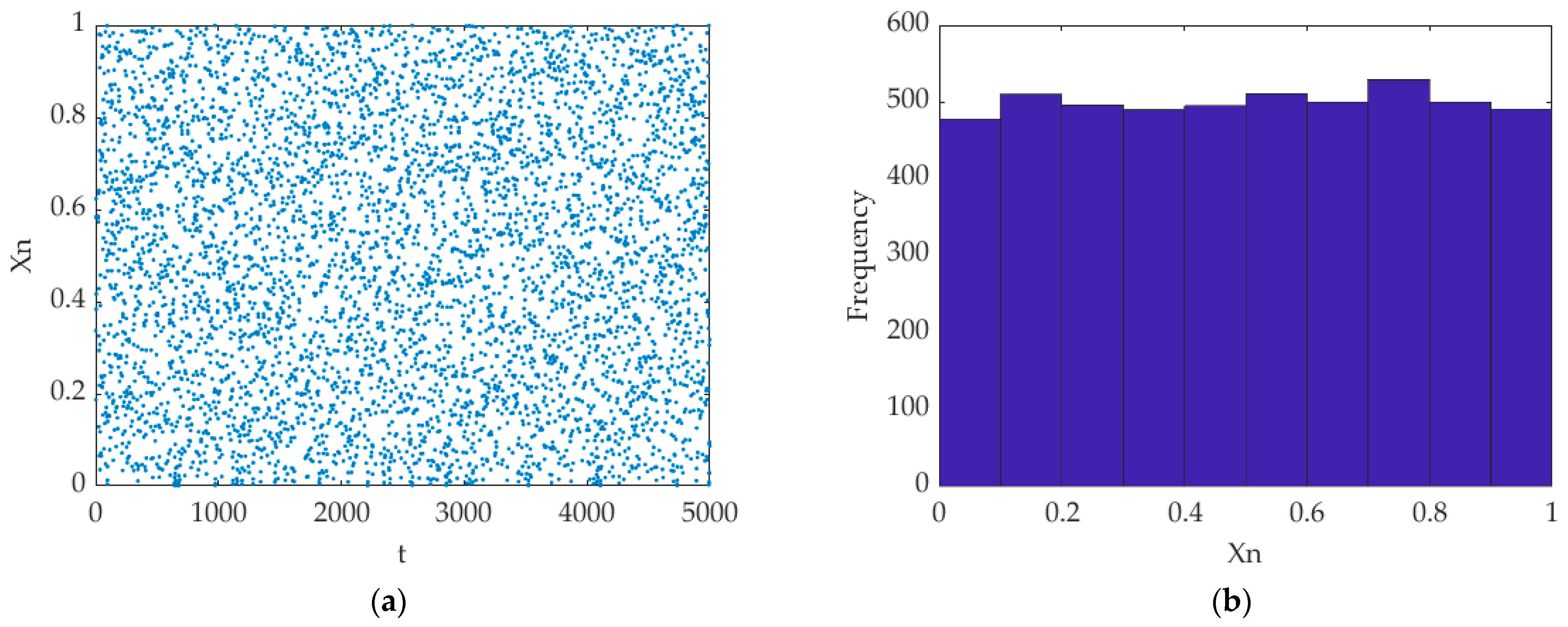
2.3.1. Initialization of CPM Mapping
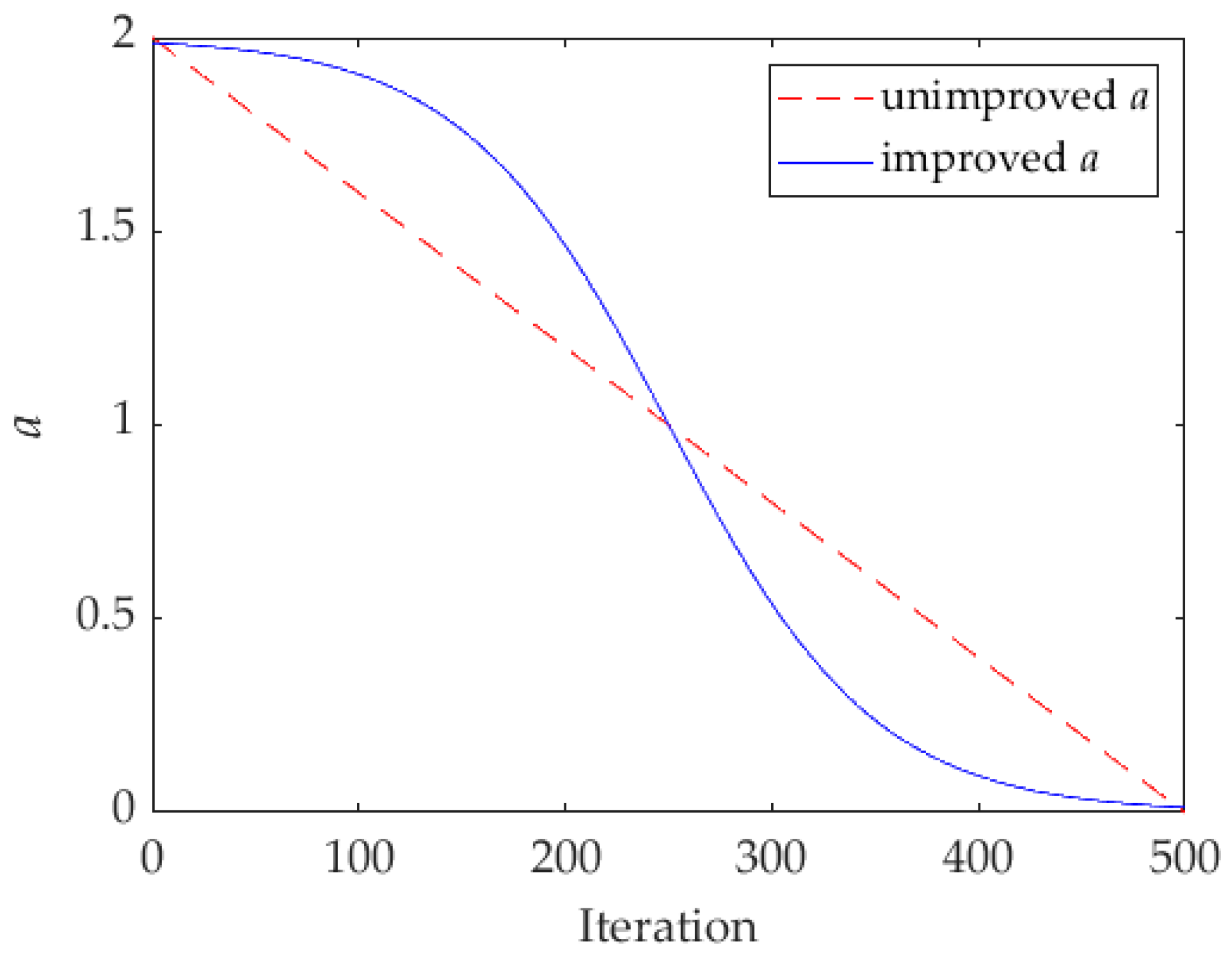
2.3.2. The Nonlinear Control Parameter Adjustment Strategy
2.3.3. The Adaptive Grouping Strategy
2.3.4. The Position Updating Strategy for Different Groups
The Improved Differential Evolution Strategy
The Stochastic Opposition-Based Learning
The Oscillation Perturbation Operator
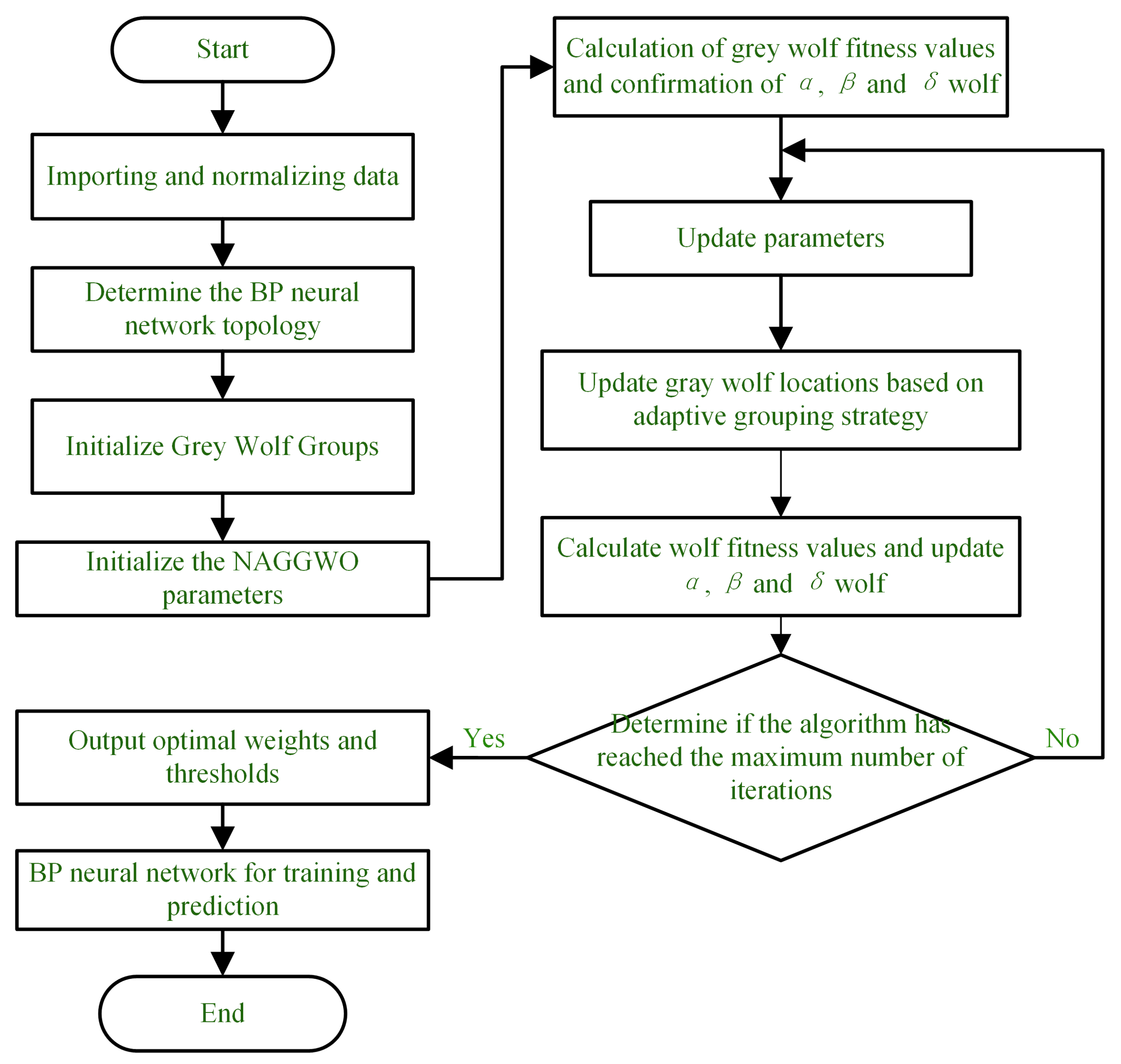
2.4. The NAGGWO-BP Algorithm
3. Experimental Analysis
3.1. Data Preprocessing
3.2. Model Parameter Setting
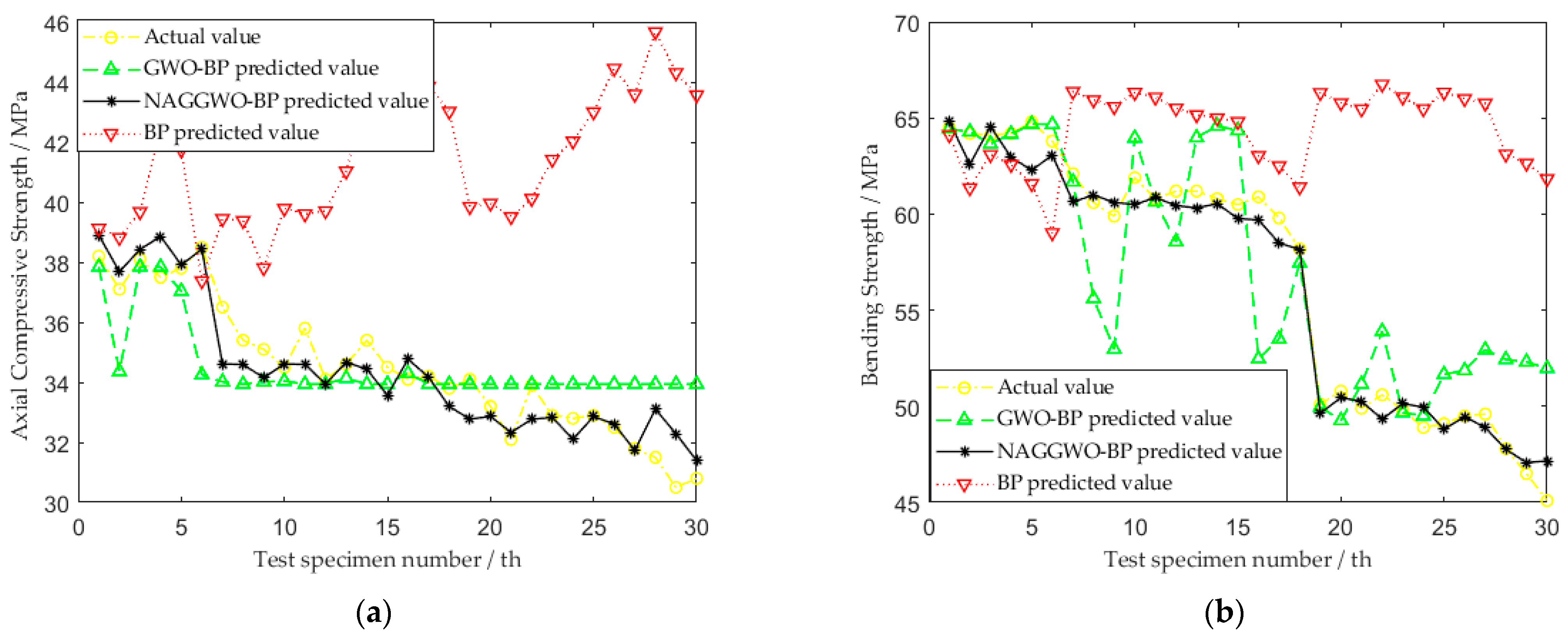
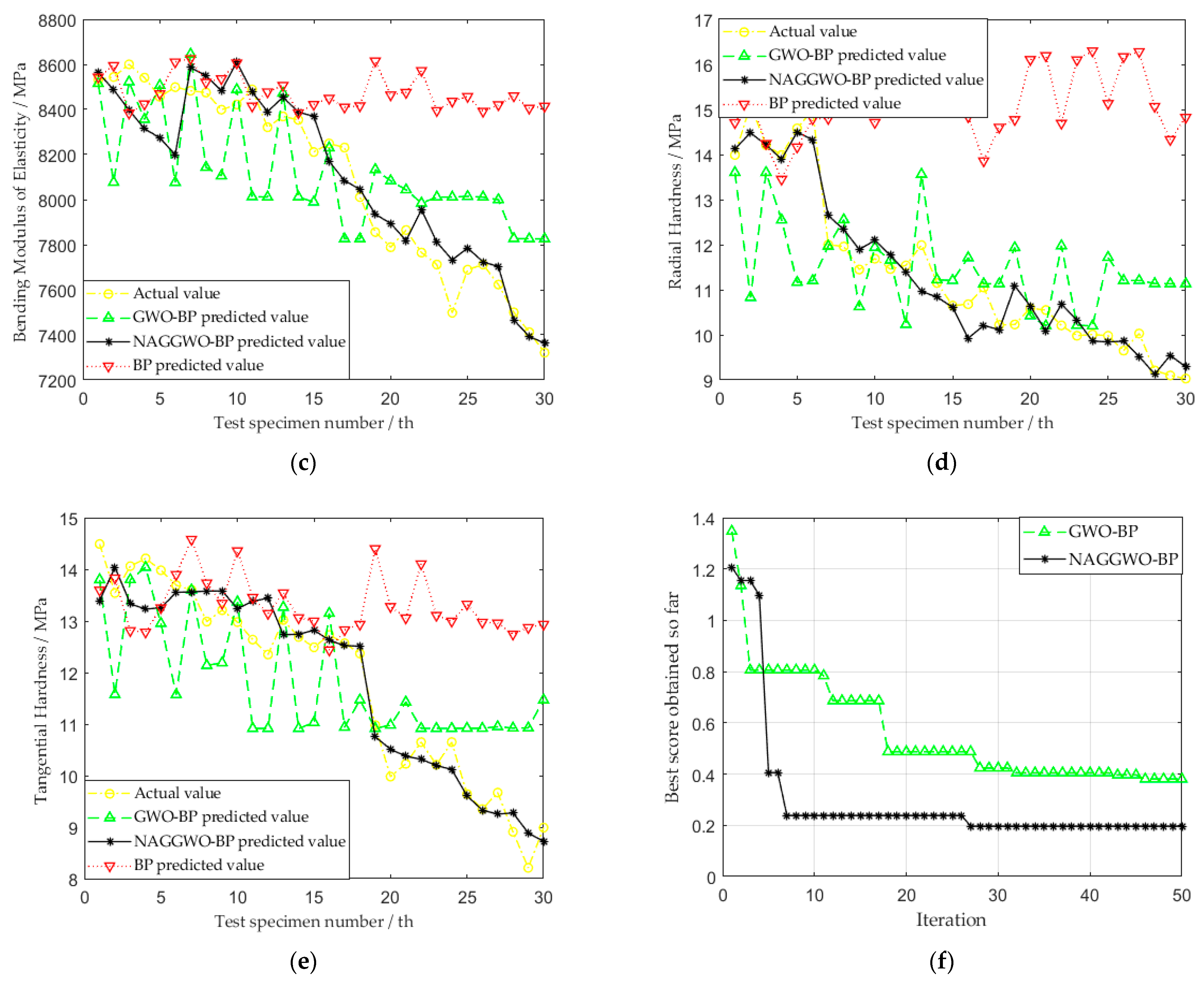
3.3. NAGGWO-BP Simulation Results Analysis
4. Conclusions
- The NAGGWO algorithm is proposed to solve the problem that the traditional GWO algorithm tends to fall into the local optimum. Firstly, the population is initialized by using CPM mapping. Secondly, an ‘S’-type nonlinear control parameter is proposed to balance the exploration and exploitation ability of the algorithm. Finally, different search methods are used for different groups of wolves by adaptively grouping them according to their fitness size. The solving speed and accuracy of the algorithm are improved.
- The proposed NAGGWO-BP model updates the weights and thresholds of the BP neural network using the NAGGWO algorithm to address the problem of its imprecise prediction results. It enhances the prediction ability of the BP neural network. We applied the NAGGWO-BP model to predict the five mechanical properties of wood to validate the model. The results show that the MAE, MSE, and MAPE values of the NAGGWO-BP model are greatly reduced, compared with the original BP neural network, and the prediction ability of the algorithm is substantially enhanced.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Temperature/°C | Test Time/h | Test Humidity/% | Axial Compressive Strength/MPa | Bending Strength/MPa | Bending Modulus of Elasticity/GPa | Radial Hardness/MPa | Tangential Hardness/MPa |
|---|---|---|---|---|---|---|---|
| 120 | 0.5 | 0 | 39.2 | 67.4 | 9.093 | 14.12 | 15.56 |
| 120 | 0.5 | 40 | 39.1 | 65.3 | 9.038 | 13.02 | 14.69 |
| 120 | 0.5 | 60 | 38.0 | 69.7 | 9.100 | 14.67 | 15.08 |
| 120 | 0.5 | 100 | 36.7 | 67.2 | 8.845 | 14.65 | 15.45 |
| 120 | 1.0 | 0 | 38.4 | 67.8 | 8.649 | 13.98 | 14.36 |
| 120 | 1.0 | 40 | 37.6 | 66.4 | 8.752 | 12.98 | 15.59 |
| 120 | 1.0 | 60 | 38.6 | 67.8 | 9.245 | 13.78 | 15.32 |
| 120 | 1.0 | 100 | 38.1 | 63.1 | 7.895 | 14.55 | 14.23 |
| 120 | 2.0 | 0 | 39.5 | 66.9 | 9.074 | 13.33 | 14.23 |
| 120 | 2.0 | 40 | 38.6 | 68.2 | 8.945 | 12.55 | 14.58 |
| 120 | 2.0 | 60 | 36.5 | 65.2 | 8.854 | 13.25 | 14.89 |
| 120 | 2.0 | 100 | 41.9 | 63.2 | 8.933 | 13.36 | 14.56 |
| 120 | 3.0 | 0 | 37.5 | 66.5 | 8.900 | 13.56 | 14.78 |
| 120 | 3.0 | 40 | 39.8 | 67.6 | 8.963 | 13.45 | 14.45 |
| 120 | 3.0 | 60 | 37.6 | 66.6 | 8.745 | 13.01 | 14.69 |
| 120 | 3.0 | 100 | 38.9 | 64.2 | 8.745 | 12.45 | 14.78 |
| 140 | 0.5 | 0 | 36.7 | 66.7 | 8.978 | 14.69 | 15.56 |
| 140 | 0.5 | 40 | 36.9 | 67.5 | 8.845 | 13.06 | 15.02 |
| 140 | 0.5 | 60 | 35.8 | 66.8 | 9.155 | 14.02 | 14.23 |
| 140 | 0.5 | 100 | 38.4 | 65.3 | 8.877 | 15.02 | 15.01 |
| 140 | 1.0 | 0 | 37.4 | 66.5 | 9.179 | 14.16 | 15.68 |
| 140 | 1.0 | 40 | 36.0 | 64.5 | 9.137 | 13.05 | 15.01 |
| 140 | 1.0 | 60 | 37.2 | 67.2 | 9.024 | 13.49 | 15.17 |
| 140 | 1.0 | 100 | 37.5 | 63.1 | 8.823 | 13.45 | 15.48 |
| 140 | 2.0 | 0 | 37.9 | 66.3 | 8.823 | 13.54 | 14.69 |
| 140 | 2.0 | 40 | 38.5 | 65.7 | 8.852 | 14.69 | 14.58 |
| 140 | 2.0 | 60 | 37.6 | 67.1 | 8.799 | 13.99 | 14.74 |
| 140 | 2.0 | 100 | 35.5 | 62.7 | 8.900 | 14.28 | 15.63 |
| 140 | 3.0 | 0 | 36.9 | 65.4 | 8.811 | 14.39 | 14.23 |
| 140 | 3.0 | 40 | 38.9 | 64.6 | 8.934 | 13.23 | 14.56 |
| 140 | 3.0 | 60 | 38.2 | 65.5 | 8.654 | 14.23 | 13.65 |
| 140 | 3.0 | 100 | 39.2 | 62.1 | 8.798 | 13.56 | 14.02 |
| 160 | 0.5 | 0 | 36.9 | 66.3 | 8.788 | 14.89 | 14.99 |
| 160 | 0.5 | 40 | 39.1 | 66.9 | 9.011 | 14.87 | 14.36 |
| 160 | 0.5 | 60 | 37.1 | 66.3 | 8.745 | 14.58 | 14.78 |
| 160 | 0.5 | 100 | 38.9 | 65.8 | 8.712 | 14.69 | 15.69 |
| 160 | 1.0 | 0 | 39.1 | 62.4 | 8.679 | 13.42 | 14.56 |
| 160 | 1.0 | 40 | 39.7 | 61.4 | 8.645 | 14.09 | 15.30 |
| 160 | 1.0 | 60 | 37.8 | 62.2 | 8.798 | 14.69 | 15.90 |
| 160 | 1.0 | 100 | 38.7 | 62.8 | 8.679 | 13.58 | 15.63 |
| 160 | 2.0 | 0 | 35.9 | 62.2 | 8.727 | 14.63 | 13.92 |
| 160 | 2.0 | 40 | 35.8 | 62.1 | 8.557 | 14.02 | 14.17 |
| 160 | 2.0 | 60 | 36.6 | 63.1 | 8.687 | 15.17 | 14.28 |
| 160 | 2.0 | 100 | 38.2 | 60.9 | 8.611 | 14.65 | 15.09 |
| 160 | 3.0 | 0 | 37.2 | 61.9 | 8.611 | 13.65 | 14.36 |
| 160 | 3.0 | 40 | 39.1 | 61.5 | 8.534 | 13.47 | 14.56 |
| 160 | 3.0 | 60 | 39.5 | 60.8 | 8.601 | 13.58 | 13.89 |
| 160 | 3.0 | 100 | 37.3 | 60.5 | 8.552 | 13.69 | 14.36 |
| 180 | 0.5 | 0 | 38.9 | 65.9 | 8.601 | 15.21 | 14.03 |
| 180 | 0.5 | 40 | 39.1 | 65.3 | 8.689 | 15.98 | 14.56 |
| 180 | 0.5 | 60 | 37.6 | 66.1 | 8.645 | 16.01 | 13.97 |
| 180 | 0.5 | 100 | 36.1 | 65.7 | 8.599 | 14.32 | 14.33 |
| 180 | 1.0 | 0 | 38.2 | 65.4 | 8.623 | 15.09 | 13.79 |
| 180 | 1.0 | 40 | 39.4 | 64.9 | 8.645 | 14.98 | 14.25 |
| 180 | 1.0 | 60 | 37.6 | 66.3 | 8.579 | 15.45 | 14.08 |
| 180 | 1.0 | 100 | 38.1 | 64.8 | 8.545 | 14.33 | 13.64 |
| 180 | 2.0 | 0 | 39.5 | 65.1 | 8.574 | 14.65 | 13.69 |
| 180 | 2.0 | 40 | 38.7 | 65.8 | 8.600 | 14.13 | 13.59 |
| 180 | 2.0 | 09 | 38.2 | 64.5 | 8.532 | 13.99 | 14.49 |
| 180 | 2.0 | 100 | 37.1 | 64.2 | 8.544 | 15.10 | 13.54 |
| 180 | 3.0 | 0 | 38.1 | 64.1 | 8.600 | 14.21 | 14.06 |
| 180 | 3.0 | 40 | 37.5 | 64.2 | 8.541 | 13.99 | 14.21 |
| 180 | 3.0 | 60 | 37.8 | 64.8 | 8.456 | 14.58 | 13.98 |
| 180 | 3.0 | 100 | 38.5 | 63.8 | 8.499 | 14.99 | 13.69 |
| 200 | 0.5 | 0 | 36.5 | 62.1 | 8.483 | 12.00 | 13.60 |
| 200 | 0.5 | 40 | 35.4 | 60.6 | 8.475 | 11.96 | 12.99 |
| 200 | 0.5 | 60 | 35.1 | 59.9 | 8.399 | 11.45 | 13.21 |
| 200 | 1.0 | 0 | 34.5 | 61.9 | 8.422 | 11.69 | 12.98 |
| 200 | 1.0 | 40 | 35.8 | 60.8 | 8.489 | 11.46 | 12.64 |
| 200 | 1.0 | 60 | 34.1 | 61.2 | 8.321 | 11.54 | 12.35 |
| 200 | 2.0 | 0 | 34.6 | 61.2 | 8.369 | 11.99 | 13.02 |
| 200 | 2.0 | 40 | 35.4 | 60.8 | 8.354 | 11.15 | 12.69 |
| 200 | 2.0 | 60 | 34.5 | 60.5 | 8.211 | 10.65 | 12.49 |
| 200 | 3.0 | 0 | 34.1 | 60.9 | 8.249 | 10.68 | 12.73 |
| 200 | 3.0 | 40 | 34.2 | 59.8 | 8.231 | 11.05 | 12.57 |
| 200 | 3.0 | 60 | 33.8 | 58.2 | 8.011 | 10.22 | 12.37 |
| 210 | 0.5 | 0 | 34.1 | 50.1 | 7.856 | 10.23 | 10.98 |
| 210 | 0.5 | 40 | 33.2 | 50.8 | 7.789 | 10.59 | 9.98 |
| 210 | 0.5 | 60 | 32.1 | 49.9 | 7.865 | 10.55 | 10.23 |
| 210 | 1.0 | 0 | 33.9 | 50.6 | 7.765 | 10.21 | 10.65 |
| 210 | 1.0 | 40 | 32.9 | 49.8 | 7.712 | 9.98 | 10.21 |
| 210 | 1.0 | 60 | 32.8 | 48.9 | 7.498 | 10.01 | 10.65 |
| 210 | 2.0 | 0 | 32.9 | 49.1 | 7.689 | 9.98 | 9.64 |
| 210 | 2.0 | 40 | 32.5 | 49.5 | 7.712 | 9.65 | 9.35 |
| 210 | 2.0 | 60 | 31.8 | 49.6 | 7.623 | 10.03 | 9.67 |
| 210 | 3.0 | 0 | 31.5 | 47.8 | 7.500 | 9.21 | 8.91 |
| 210 | 3.0 | 40 | 30.5 | 46.5 | 7.412 | 9.10 | 8.21 |
| 210 | 3.0 | 60 | 30.8 | 45.1 | 7.321 | 9.03 | 8.99 |
References
- Esteves, B.; Ferreira, H.; Viana, H.; Ferreira, J.; Domingos, I.; Cruz-Lopes, L.; Jones, D.; Nunes, L. Termite Resistance, Chemical and Mechanical Characterization of Paulownia tomentosa Wood before and after Heat Treatment. Forests 2021, 12, 1114. [Google Scholar] [CrossRef]
- Suri, I.F.; Purusatama, B.D.; Kim, J.H.; Yang, G.U.; Prasetia, D.; Kwon, G.J.; Hidayat, W.; Lee, S.H.; Febrianto, F.; Kim, N.H. Comparison of physical and mechanical properties of Paulownia tomentosa and Pinus koraiensis wood heat-treated in oil and air. Eur. J. Wood Wood Prod. 2022, 80, 1389–1399. [Google Scholar] [CrossRef]
- Wang, W.; Ma, W.; Wu, M.; Sun, L. Effect of Water Molecules at Different Temperatures on Properties of Cellulose Based on Molecular Dynamics Simulation. Bioresources 2022, 17, 269–280. [Google Scholar] [CrossRef]
- Esteves, B.; Marques, A.V.; Domingos, I.; Pereira, H. Heat-induced colour changes of pine (Pinus pinaster) and eucalypt (Eucalyptus globulus) wood. Wood Sci. Technol. 2008, 42, 369–384. [Google Scholar] [CrossRef] [Green Version]
- Huang, X.; Kocaefe, D.; Kocaefe, Y.; Boluk, Y.; Pichette, A. A spectrocolorimetric and chemical study on color modification of heat-treated wood during artificial weathering. Appl. Surf. Sci. 2012, 258, 5360–5369. [Google Scholar] [CrossRef]
- Navickas, P.; Albrektas, D. Effect of Heat Treatment on Sorption Properties and Dimensional Stability of Wood. Mater. Sci.-Medzg. 2013, 19, 291–294. [Google Scholar] [CrossRef] [Green Version]
- Bekhta, P.; Niemz, P. Effect of high temperature on the change in color, dimensional stability and mechanical properties of spruce wood. Holzforschung 2003, 57, 539–546. [Google Scholar] [CrossRef]
- Wang, J.Y.; Cooper, P.A. Effect of oil type, temperature and time on moisture properties of hot oil-treated wood. Holz Als Roh-Und Werkst. 2005, 63, 417–422. [Google Scholar] [CrossRef]
- Bayani, S.; Taghiyari, H.R.; Papadopoulos, A.N. Physical and Mechanical Properties of Thermally-Modified Beech Wood Impregnated with Silver Nano-Suspension and Their Relationship with the Crystallinity of Cellulose. Polymers 2019, 11, 1538. [Google Scholar] [CrossRef] [Green Version]
- Herrera-Diaz, R.; Sepulveda-Villarroel, V.; Torres-Mella, J.; Salvo-Sepulveda, L.; Llano-Ponte, R.; Salinas-Lira, C.; Peredo, M.A.; Ananias, R.A. Influence of the wood quality and treatment temperature on the physical and mechanical properties of thermally modified radiata pine. Eur. J. Wood Wood Prod. 2019, 77, 661–671. [Google Scholar] [CrossRef]
- Cai, X.; Riedl, B.; Zhang, S.Y.; Wan, H. Effects of nanofillers on water resistance and dimensional stability of solid wood modified by melamine-urea-formaldehyde resin. Wood Fiber Sci. 2007, 39, 307–318. [Google Scholar] [CrossRef]
- Hussain, S.F.; Hussain, G.; Rahman, N. Artificial neural network modelling and optimization of elastic and an-elastic spring back in polymer parts produced through ISF. Int. J. Adv. Manuf. Technol. 2022, 118, 2163–2176. [Google Scholar] [CrossRef]
- Prikeznik, M.; Srcic, S. Artificial neural networks for investigation of the most important factors of industrial tablet manufacturing on the dissolution of active pharmaceutical ingredients as critical quality attributes. Farmacia 2021, 69, 732–740. [Google Scholar] [CrossRef]
- Shaik, N.B.; Mantrala, K.M.; Narayana, K.L. Prediction of corrosion properties of LENS (TM) deposited cobalt, chromium and molybdenum alloy using artificial neural networks. Int. J. Mater. Prod. Technol. 2021, 62, 4–15. [Google Scholar] [CrossRef]
- Wang, C.-S.; Hsiao, Y.-H.; Chang, H.-Y.; Chang, Y.-J. Process Parameter Prediction and Modeling of Laser Percussion Drilling by Artificial Neural Networks. Micromachines 2022, 13, 529. [Google Scholar] [CrossRef]
- Zhang, D.; Liu, Y.; Cao, J.; Sun, L. Neural Network Prediction Model of Wood Moisture Content for Drying Process. Sci. Silvae Sin. 2008, 44, 94–98. [Google Scholar] [CrossRef]
- Yang, H.; Cheng, W.; Han, G. Wood Modification at High Temperature and Pressurized Steam: A Relational Model of Mechanical Properties Based on a Neural Network. Bioresources 2015, 10, 5758–5776. [Google Scholar] [CrossRef]
- Chai, H.; Chen, X.; Cai, Y.; Zhao, J. Artificial Neural Network Modeling for Predicting Wood Moisture Content in High Frequency Vacuum Drying Process. Forests 2019, 10, 16. [Google Scholar] [CrossRef] [Green Version]
- Hadavandi, E.; Mostafayi, S.; Soltani, P. A Grey Wolf Optimizer-based neural network coupled with response surface method for modeling the strength of siro-spun yarn in spinning mills. Appl. Soft Comput. 2018, 72, 1–13. [Google Scholar] [CrossRef]
- Tian, Y.; Yu, J.; Zhao, A. Predictive model of energy consumption for office building by using improved GWO-BP. Energy Rep. 2020, 6, 620–627. [Google Scholar] [CrossRef]
- Hu, R.; Wen, S.; Zeng, Z.; Huang, T. A short-term power load forecasting model based on the generalized regression neural network with decreasing step fruit fly optimization algorithm. Neurocomputing 2017, 221, 24–31. [Google Scholar] [CrossRef]
- Wang, J.; Shi, P.; Jiang, P.; Hu, J.; Qu, S.; Chen, X.; Chen, Y.; Dai, Y.; Xiao, Z. Application of BP Neural Network Algorithm in Traditional Hydrological Model for Flood Forecasting. Water 2017, 9, 48. [Google Scholar] [CrossRef] [Green Version]
- Mirjalili, S.; Mirjalili, S.M.; Lewis, A. Grey Wolf Optimizer. Adv. Eng. Softw. 2014, 69, 46–61. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Ma, H.; Li, Z. An Improved Grasshopper Optimization Algorithm for Global Optimization. Chin. J. Electron. 2021, 30, 451–459. [Google Scholar] [CrossRef]
- Lu, Q.Z.; Jiang, J.H.; Yu, R.Q.; Shen, G.L. A genetic algorithm based on prepotency evolution using chaotic initiation used for network training. J. Chem. Inf. Comput. Sci. 2003, 43, 1132–1137. [Google Scholar] [CrossRef]
- Leriche, R.; Sienra, G. Dynamical Aspects of Piecewise Conformal Maps. Qual. Theory Dyn. Syst. 2019, 18, 1237–1261. [Google Scholar] [CrossRef] [Green Version]
- Choi, J.-Y.; Im, D.K.; Park, J.; Choi, S. Prediction of Dynamic Stability Using Mapped Chebyshev Pseudospectral Method. Int. J. Aerosp. Eng. 2018, 2018, 2508153. [Google Scholar] [CrossRef]
- Storn, R.; Price, K. Differential Evolution—A Simple and Efficient Heuristic for global Optimization over Continuous Spaces. J. Glob. Optim. 1997, 11, 341–359. [Google Scholar] [CrossRef]
- Sun, G.; Yang, B.; Yang, Z.; Xu, G. An adaptive differential evolution with combined strategy for global numerical optimization. Soft Comput. 2020, 24, 6277–6296. [Google Scholar] [CrossRef]
- Das, S.; Mullick, S.S.; Suganthan, P.N. Recent advances in differential evolution—An updated survey. Swarm Evol. Comput. 2016, 27, 1–30. [Google Scholar] [CrossRef]
- Tizhoosh, H.R. Opposition-based learning: A new scheme for machine intelligence. In Proceedings of the International Conference on Computational Intelligence for Modelling, Control and Automation and International Conference on Intelligent Agents, Web Technologies and Internet Commerce, Vienna, Austria, 28–30 November 2005. [Google Scholar]
- Tubishat, M.; Idris, N.; Shuib, L.; Abushariah, M.A.M.; Mirjalili, S. Improved Salp Swarm Algorithm based on opposition based learning and novel local search algorithm for feature selection. Expert Syst. Appl. 2020, 145, 113122. [Google Scholar] [CrossRef]
- Dhargupta, S.; Ghosh, M.; Mirjalili, S.; Sarkar, R. Selective Opposition based Grey Wolf Optimization. Expert Syst. Appl. 2020, 151, 113389. [Google Scholar] [CrossRef]
- Bai, H.R.; Chu, Z.Y.; Wang, D.W.; Bao, Y.; Qin, L.Y.; Zheng, Y.H.; Li, F.M. Predictive control of microwave hot-air coupled drying model based on GWO-BP neural network. Dry. Technol. 2022. [Google Scholar] [CrossRef]
- Liang, Q.; Zhang, X.M.; Liu, X.; Li, Y.L. Prediction of high-temperature flow stress of HMn64-8-5-1.5 manganese brass alloy based on modified Zerilli-Armstrong, Arrhenius and GWO-BPNN model. Mater. Res. Express 2022, 9, 9. [Google Scholar] [CrossRef]
- Ding, T.; Gu, L.; Li, T. Influence of steam pressure on physical and mechanical properties of heat-treated Mongolian pine lumber. Eur. J. Wood Wood Prod. 2011, 69, 121–126. [Google Scholar] [CrossRef]
- Tiryaki, S.; Aydin, A. An artificial neural network model for predicting compression strength of heat treated woods and comparison with a multiple linear regression model. Constr. Build. Mater. 2014, 62, 102–108. [Google Scholar] [CrossRef]
- Li, N.; Wang, W. Prediction of Mechanical Properties of Thermally Modified Wood Based on TSSA-BP Model. Forests 2022, 13, 160. [Google Scholar] [CrossRef]






| Symbol | Meaning |
|---|---|
| t | The number of current iterations |
| The position vector of the gray wolf | |
| The position vector of the prey | |
| The coefficient vector | |
| The maximum number of iterations | |
| Random variables | |
| d | Control parameter of CMP mapping |
| a | Nonlinear control parameter of GWO |
| Individuals in the predator, wanderer, and searcher group | |
| n | The number of gray wolves |
| Group boundaries of gray wolves | |
| W | Scaling factor |
| ξ | The oscillation operator |
| The normalized interval set | |
| The minimum and maximum values of x |
| NAGGWO-BP | GWO-BP | BP | TSSA-BP | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MSE | MAPE | MAE | MSE | MAPE | MAE | MSE | MAPE | MAE | MSE | MAPE | |
| Axial Compressive Strength | 0.65 | 0.73 | 1.90% | 1.26 | 2.80 | 3.72% | 6.99 | 63.14 | 20.98% | 1 | 1.48 | 2.90% |
| Bending Strength | 0.79 | 0.99 | 1.38% | 2.57 | 12.48 | 4.72% | 8.58 | 113.37 | 16.67% | 3.68 | 16.99 | 6.81% |
| Bending Modulus of Elasticity | 103.52 | 16,174 | 1.27% | 272.20 | 94,416 | 3.41% | 406.44 | 289,351 | 5.25% | 282.56 | 235,795 | 3.12% |
| Radial Hardness | 0.37 | 0.21 | 3.27% | 1.21 | 2.66 | 10.51% | 3.90 | 19.32 | 37.39% | 0.66 | 0.66 | 5.64% |
| Tangential Hardness | 0.39 | 0.25 | 3.29% | 1.10 | 1.74 | 9.98% | 1.78 | 5.23 | 17.36% | 0.99 | 1.57 | 9.61% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ma, W.; Wang, W.; Cao, Y. Mechanical Properties of Wood Prediction Based on the NAGGWO-BP Neural Network. Forests 2022, 13, 1870. https://doi.org/10.3390/f13111870
Ma W, Wang W, Cao Y. Mechanical Properties of Wood Prediction Based on the NAGGWO-BP Neural Network. Forests. 2022; 13(11):1870. https://doi.org/10.3390/f13111870
Chicago/Turabian StyleMa, Wei, Wei Wang, and Ying Cao. 2022. "Mechanical Properties of Wood Prediction Based on the NAGGWO-BP Neural Network" Forests 13, no. 11: 1870. https://doi.org/10.3390/f13111870