
Automated Marker-Free Registration of Multisource Forest Point Clouds Using a Coarse-to-Global Adjustment Strategy

 , , ,
, , ,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Multisource Point Clouds
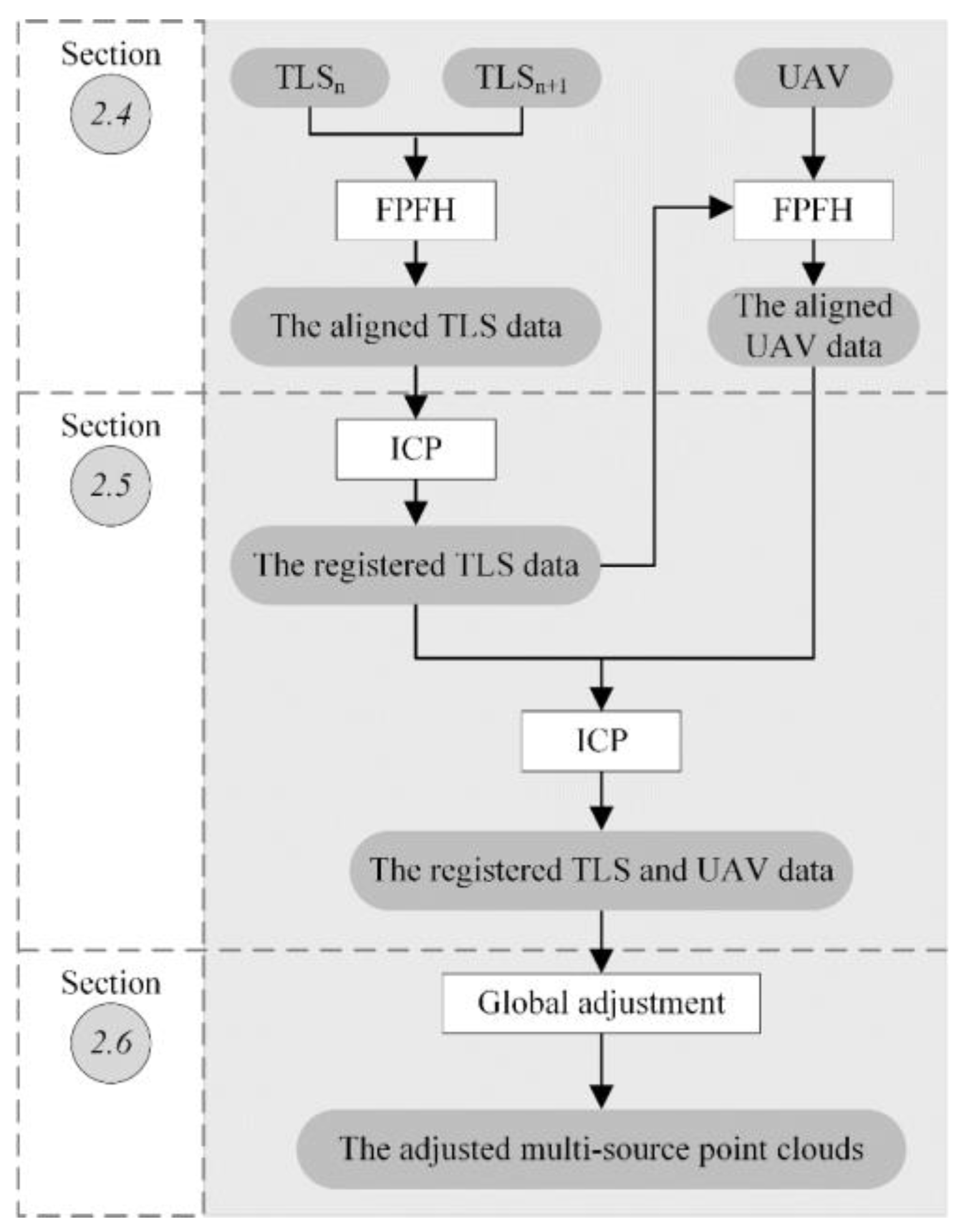
2.3. Overview of the Method
2.4. Coarse Alignment Using the Fast Point FeatureHistogram (FPFH) Method
2.5. Fine Pairwise Registration
2.6. Graph-Based Global Adjustment
3. Results
3.1. Evaluation of the Coarse Alignment Results
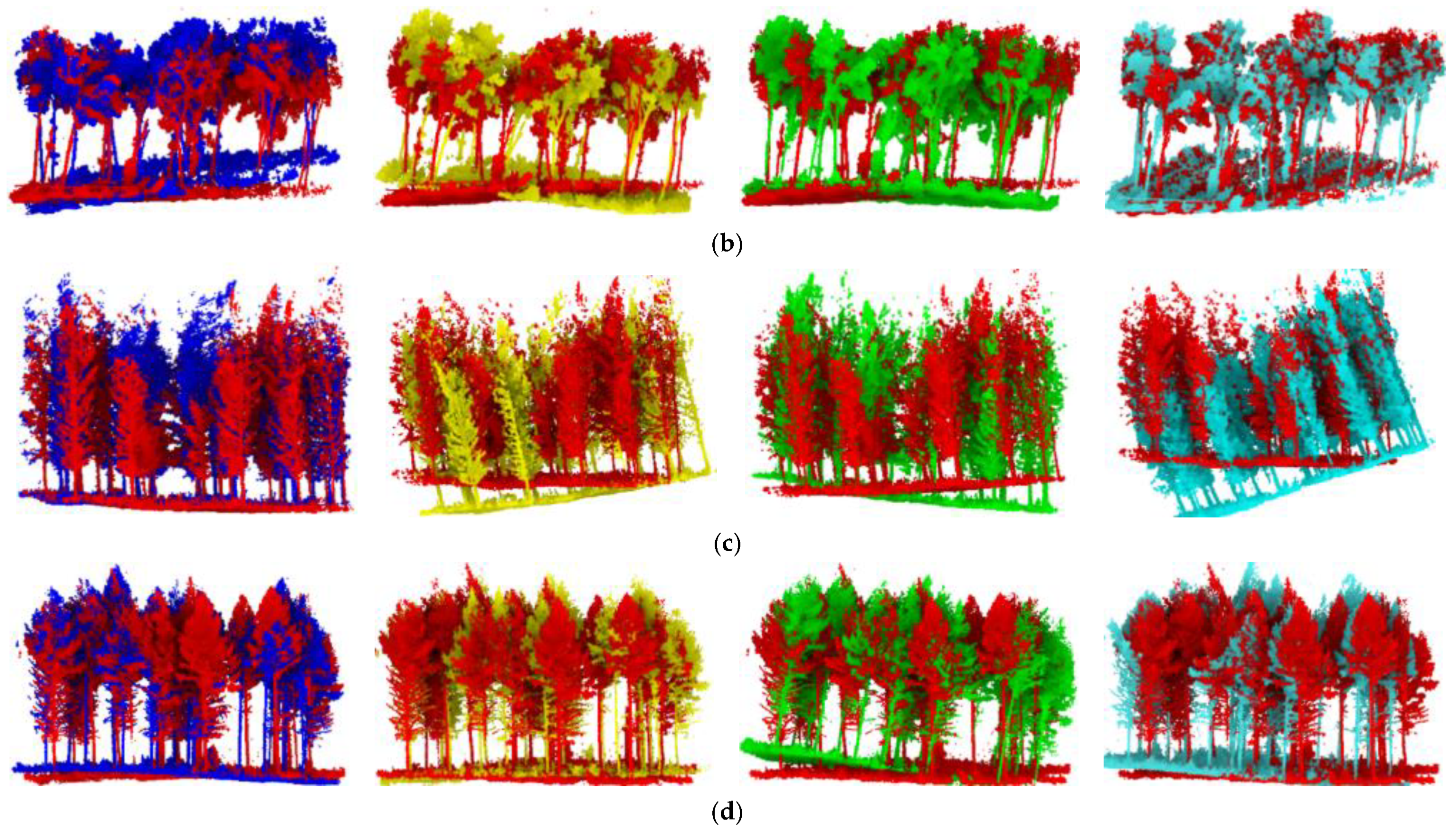
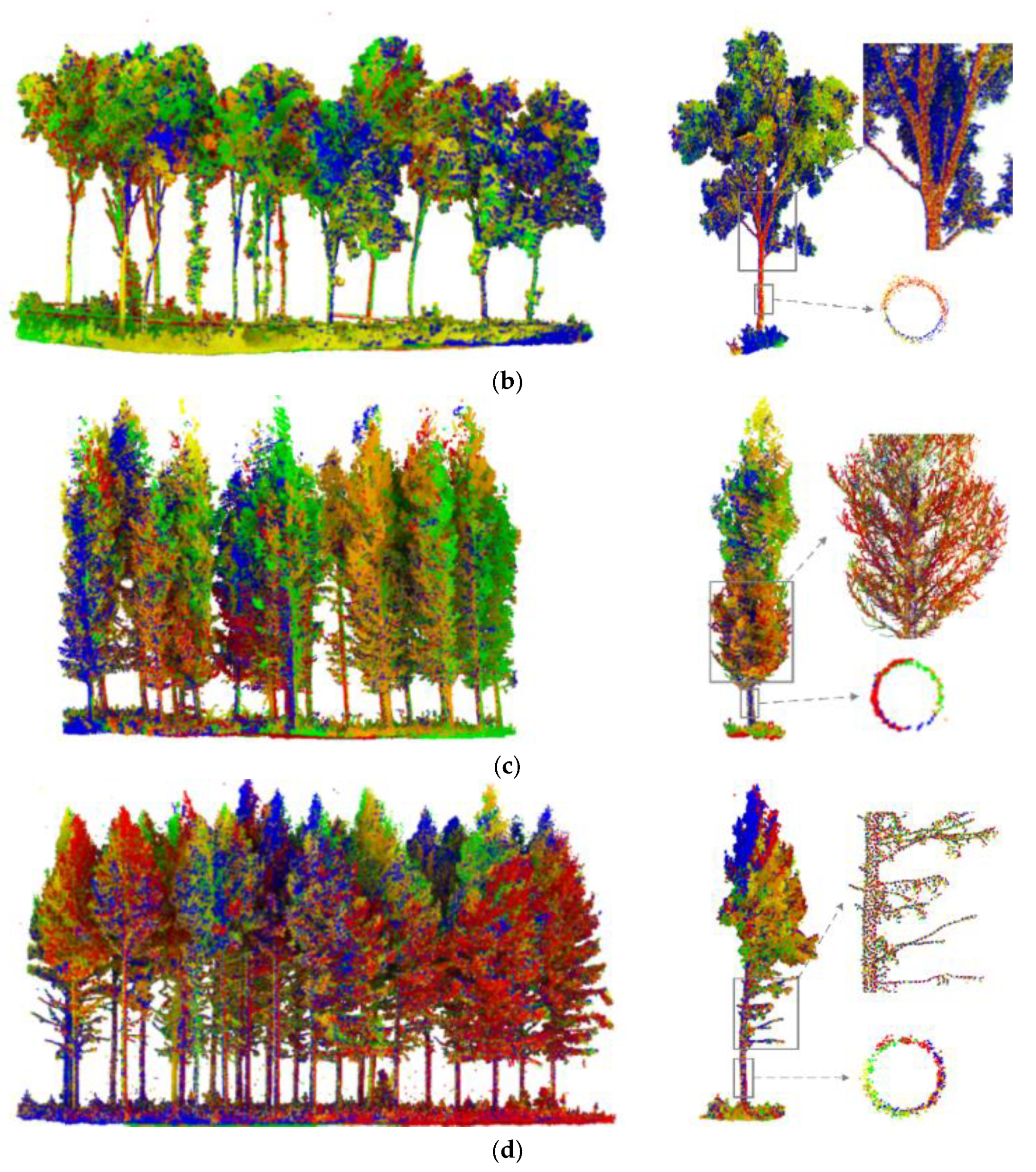
3.2. Registration of the Multisource Point Clouds
4. Discussion
4.1. Runtime Performance Analysis
4.2. Data Performance Analysis
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Chambers, J.Q.; Asner, G.P.; Morton, D.C.; Anderson, L.O.; Saatchi, S.S.; Espírito-Santo, F.D.B.; Palace, M.; Carlos, S., Jr. Regional ecosystem structure and function: Ecological insights from remote sensing of tropical forests. Trends Ecol. Evol. 2007, 22, 414–423. [Google Scholar] [CrossRef]
- Nelson, R.; Krabill, W.; MacLean, G. Determining forest canopy characteristics using airborne laser data. Remote Sens. Environ. 1984, 15, 201–212. [Google Scholar] [CrossRef]
- Hackenberg, J.; Wassenberg, M.; Spiecker, H.; Sun, D. Non destructive method for biomass prediction combining TLS derived tree volume and wood density. Forests 2015, 6, 1274–1300. [Google Scholar] [CrossRef]
- Zhang, W.; Wan, P.; Wang, T.; Cai, S.; Chen, Y.; Jin, X.; Yan, G. A novel approach for the detection of standing tree stems from plot-level terrestrial laser scanning data. Remote Sens. 2019, 11, 211. [Google Scholar] [CrossRef] [Green Version]
- Lu, J.B.; Wang, H.; Qin, S.H.; Cao, L.; Pu, R.L.; Li, G.L.; Sun, J. Estimation of aboveground biomass of Robinia pseudoacacia forest in the Yellow River Delta based on UAV and Backpack LiDAR point clouds. Int. J. Appl. Earth Obs. Geoinf. 2020, 86, 102014. [Google Scholar] [CrossRef]
- Liang, X.; Hyyppä, J.; Kaartinen, H.; Lehtomäki, M.; Pyörälä, J.; Pfeifer, N.; Holopainen, M.; Brolly, G.; Francesco, P.; Hackenberg, J.; et al. International benchmarking of terrestrial laser scanning approaches for forest inventories. ISPRS J. Photogramm. Remote Sens. 2018, 144, 137–179. [Google Scholar] [CrossRef]
- Wallace, L.; Lucieer, A.; Watson, C.; Turner, D. Development of a uav-lidar system with application to forest inventory. Remote Sens. 2012, 4, 1519–1543. [Google Scholar] [CrossRef] [Green Version]
- Liang, X.; Kankare, V.; Hyyppä, J.; Wang, Y.; Kukko, A.; Haggrén, H.; Yu, X.; Kaartinen, H.; Jaakkola, A.; Guan, F.; et al. Terrestrial laser scanning in forest inventories. ISPRS J. Photogramm. Remote Sens. 2016, 115, 63–77. [Google Scholar] [CrossRef]
- Xia, S.; Wang, C.; Pan, F.; Xi, X.; Zeng, H.; Liu, H. Detecting stems in dense and homogeneous forest using single-scan TLS. Forests 2015, 6, 3923–3945. [Google Scholar] [CrossRef] [Green Version]
- Lovell, J.L.; Jupp, D.L.B.; Newnham, G.J.; Culvenor, D.S. Measuring tree stem diameters using intensity profiles from ground-based scanning lidar from a fixed viewpoint. ISPRS J. Photogramm. Remote Sens. 2011, 66, 46–55. [Google Scholar] [CrossRef]
- Shao, J.; Zhang, W.; Mellado, N.; Wang, N.; Jin, S.; Cai, S.; Luo, L.; Lejemble, T.; Yan, G. SLAM-aided forest plot mapping combining terrestrial and mobile laser scanning. ISPRS J. Photogramm. Remote Sens. 2020, 163, 214–230. [Google Scholar]
- Kelbe, D.; Van Adrdt, J.; Romanczyk, P.; Van Leeuwen, M.; Cawse-Nicholson, K. Single-scan stem reconstruction using low-resolution terrestrial laser scanner data. IEEE J. Sel. Top. Appl. Remote Sens. 2015, 8, 3414–3427. [Google Scholar] [CrossRef]
- Hyyppä, J.; Holopainen, M.; Olsson, H. Laser scanning in forests. Remote Sens. 2012, 4, 2919–2922. [Google Scholar] [CrossRef] [Green Version]
- Luo, L.; Wang, X.; Guo, Q.; Lasaponara, R.; Zong, X.; Masini, N.; Wang, G.; Shi, P.; Khatteli, H.; Chen, F.; et al. Airborne and spaceborne remote sensing for archaeological and cultural heritage application: A review of the century (1907–2017). Remote Sens. Environ. 2019, 232, 111280. [Google Scholar] [CrossRef]
- Polewski, P.; Ericksonc, A.; Yao, W.; Coopsc, N.; Krzysteka, P.; Stillab, U. Object-based coregistration of terrestrial photogrammetric and ALS point clouds in forested areas. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 3, 347. [Google Scholar]
- Wang, Y.; Lehtomäki, M.; Liang, X.; Pyörälä, J.; Kukko, A.; Jaakkola, A.; Liu, J.; Feng, Z.; Chen, R.; Hyyppä, J. Is field-measured tree height as reliable as believed—A comparison study of tree height estimates from field measurement, airborne laser scanning and terrestrial laser scanning in a boreal forest. ISPRS J. Photogramm. Remote Sens. 2019, 147, 132–145. [Google Scholar] [CrossRef]
- Hilker, T.; Coops, N.C.; Culvenor, D.S.; Newnham, G.; Wulder, M.A.; Bater, C.W.; Siggins, A. A simple technique for co-registration of terrestrial lidar observations for forestry applications. Remote Sens. Lett. 2012, 3, 239–247. [Google Scholar] [CrossRef]
- Watt, P.; Donoghue, D. Measuring forest structure with terrestrial laser scanning. Int. J. Remote Sens. 2005, 26, 1437–1446. [Google Scholar] [CrossRef]
- Tansey, K.; Selmes, N.; Anstee, A.; Tate, N.; Denniss, A. Estimating tree and stand variables in a Corsican Pine woodland from terrestrial laser scanner data. Int. J. Remote Sens. 2009, 30, 5195–5209. [Google Scholar] [CrossRef]
- Pueschel, P. The influence of scanner parameters on the extraction of tree metrics from faro photo 120 terrestrial laser scans. ISPRS J. Photogramm. Remote Sens. 2013, 78, 58–68. [Google Scholar] [CrossRef]
- Zhang, W.; Chen, Y.; Wang, H.; Chen, M.; Wang, X.; Yan, G. Efficient registration of terrestrial lidar scans using a coarse-to-fine strategy for forestry applications. Agric. For. Meteorol. 2016, 225, 8–23. [Google Scholar] [CrossRef]
- Aiger, D.; Mitra, N.J.; Cohen-Or, D. 4-points congruent sets for robust pairwise surface registration. ACM Trans. Graph. 2008, 27, 1–10. [Google Scholar] [CrossRef] [Green Version]
- Mellado, N.; Aiger, D.; Mitra, N.J. SUPER 4PCS fast global pointcloud registration via smart indexing. Comput. Graph. Forum 2014, 33, 205–215. [Google Scholar] [CrossRef] [Green Version]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Weinmann, M.; Weinmann, M.; Hinz, S.; Jutzi, B. Fast and automatic image-based registration of TLS data. ISPRS J. Photogramm. Remote Sens. 2011, 66, S62–S70. [Google Scholar] [CrossRef]
- Theiler, P.W.; Wegner, J.D.; Schindler, K. Keypoint-based 4-points congruent sets—Automated marker-less registration of laser scans. ISPRS J. Photogramm. Remote Sens. 2009, 96, 149–163. [Google Scholar] [CrossRef]
- Shao, J.; Zhang, W.; Mellado, N.; Grussenmeyer, P.; Li, R.; Chen, Y.; Wan, P.; Zhang, X.; Cai, S. Automated markerless registration of point clouds from TLS and structured light scanner for heritage documentation. J. Cult. Herit. 2019, 35, 16–24. [Google Scholar] [CrossRef] [Green Version]
- Kelbe, D.; Van Aardt, J.; Romanczyk, P.; Leeuwen, M.V.; Cawse-Nicholson, K. Marker-free registration of forest terrestrial laser scanner data pairs with embedded confidence metrics. IEEE Trans. Geosci. Remote Sens. 2016, 54, 4314–4330. [Google Scholar] [CrossRef]
- Liu, J.; Liang, X.; Hyyppä, J.; Yu, X.; Lehtomäki, M.; Pyörälä, J.; Zhu, L.; Wang, Y.; Chen, R. Automated matching of multiple terrestrial laser scans for stem mapping without the use of artificial references. Int. J. Appl. Earth Obs. Geoinf. 2017, 56, 13–23. [Google Scholar] [CrossRef] [Green Version]
- Calders, K.; Armston, J.; Newnham, G.; Herold, M.; Goodwin, N. Implications of sensor configuration and topography on vertical plant profiles derived from terrestrial lidar. Agric. For. Meteorol. 2014, 194, 104–117. [Google Scholar] [CrossRef]
- Kelbe, D.; Van Aardt, J.; Romanczyk, P.; Leeuwen, M.V.; Cawse-Nicholson, K. Multiview marker-free registration of forest terrestrial laser scanner data with embedded confidence metrics. IEEE Trans. Geosci. Remote Sens. 2017, 55, 729–741. [Google Scholar] [CrossRef]
- Böhm, J.; Haala, N. Efficient integration of aerial and terrestrial laser data for virtual city modeling using LASERMAPs. In Proceedings of the ISPRS Workshop Laser Scanning, Enschede, The Netherlands, 12–14 September 2015. [Google Scholar]
- Hauglin, M.; Lien, V.; Næsset, E.; Gobakken, T. Geo-referencing forest field plots by co-registration of terrestrial and airborne laser scanning data. Int. J. Remote Sens. 2014, 35, 3135–3149. [Google Scholar] [CrossRef]
- Shao, J.; Zhang, W.; Mellado, N.; Jin, S.; Cai, S.; Luo, L.; Yang, L.; Yan, G.; Zhou, G. Single scanner BLS system for forest plot mapping. IEEE Trans. Geosci. Remote Sens. 2021, 59, 1675–1685. [Google Scholar] [CrossRef]
- Yao, J.; Ruggeri, M.R.; Taddei, P.; Sequeira, V. Automatic scan registration using 3d linear and planar features. 3D Res. 2010, 1, 1–18. [Google Scholar] [CrossRef]
- Al-Durgham, K.; Habib, A. Association-matrix-based sample consensus approach for automated registration of terrestrial laser scans using linear features. Photogramm. Eng. Remote Sens. 2014, 80, 1029–1039. [Google Scholar] [CrossRef]
- Yang, B.; Zang, Y.; Dong, Z.; Huang, R. An automated method to register airborne and terrestrial laser scanning point clouds. ISPRS J. Photogramm. Remote Sens. 2015, 109, 62–76. [Google Scholar] [CrossRef]
- Cheng, X.; Cheng, X.; Li, Q.; Ma, L. Automatic registration of terrestrial and airborne point clouds using building outline features. IEEE J. Sel. Top. Appl. Remote Sens. 2018, 11, 628–638. [Google Scholar] [CrossRef]
- Polewski, P.; Yao, W.; Cao, L.; Gao, S. Marker-free coregistration of UAV and backpack lidar point clouds in forested areas. ISPRS J. Photogramm. Remote Sens. 2019, 147, 307–318. [Google Scholar] [CrossRef]
- Kukko, A.; Kaijaluoto, R.; Kaartinen, H.; Lehtola, V.V.; Jaakkola, A.; Hyyppä, J. Graph SLAM correction for single scanner MLS forest data under boreal forest canopy. ISPRS J. Photogramm. Remote Sens. 2017, 132, 199–209. [Google Scholar] [CrossRef]
- Paris, C.; Kelbe, D.; Van Aardt, J.; Bruzzone, L. A novel automatic method for the fusion of ALS and TLS lidar data for robust assessment of tree crown structure. IEEE Trans. Geosci. Remote Sens. 2017, 55, 3679–3693. [Google Scholar] [CrossRef]
- Dai, W.; Yang, B.; Liang, X.; Dong, Z.; Huang, R.; Wang, Y.; Li, W. Automated fusion of forest airborne and terrestrial point clouds through canopy density analysis. ISPRS J. Photogramm. Remote Sens. 2019, 156, 94–107. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Marton, Z.C.; Beetz, M. Aligning point cloud views using persistent feature histograms. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; pp. 22–26. [Google Scholar]
- Rusu, R.B.; Blodow, N.; Beetz, M. Fast point feature histograms (FPFH) for 3d registration. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 12–17. [Google Scholar]
- Besl, P.J.; Mckay, N.D. A method for registration of 3-D shapes. IEEE Trans. Pattern Anal. 1992, 14, 239–256. [Google Scholar] [CrossRef]
- Glira, P.; Pfeifer, N.; Ressl, C.; Briese, C. A correspondence framework for ALS strip adjustment based on variants of the ICP algorithm. J. Photogram. Remote Sens. Geoinf. Sci. 2015, 4, 275–289. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | Avg. Distance (m) | T. Avg. (m) | ||||
|---|---|---|---|---|---|---|
| T2–T1 | T3–T1 | T4–T1 | T5–T1 | UAV-TLS | ||
| 1 | 0.538 | 0.748 | 0.540 | 1.494 | 1.783 | 1.021 |
| 2 | 0.385 | 2.207 | 2.005 | 0.868 | 1.402 | 1.373 |
| 3 | 0.963 | 1.752 | 1.474 | 2.371 | 1.605 | 1.633 |
| 4 | 0.657 | 1.502 | 0.862 | 2.418 | 0.948 | 1.277 |
| Dataset | Features NT | Deviations (m) | |||
|---|---|---|---|---|---|
| MD | RMSE | STD | Max | ||
| 1 | 15 | 0.012 | 0.012 | 0.002 | 0.014 |
| 2 | 15 | 0.012 | 0.012 | 0.002 | 0.016 |
| 3 | 15 | 0.011 | 0.011 | 0.002 | 0.013 |
| 4 | 15 | 0.011 | 0.012 | 0.003 | 0.015 |
| Dataset | Features NT | Deviations (m) | |||
|---|---|---|---|---|---|
| MD | RMSE | STD | Max | ||
| 1 | 15 | 0.022 | 0.024 | 0.011 | 0.040 |
| 2 | 15 | 0.022 | 0.026 | 0.013 | 0.045 |
| 3 | 15 | 0.021 | 0.023 | 0.009 | 0.033 |
| 4 | 15 | 0.021 | 0.024 | 0.011 | 0.041 |
| Dataset | Features NT | Deviations (m) | |||
|---|---|---|---|---|---|
| MD | RMSE | STD | Max | ||
| 1 | 15 | 0.012 | 0.013 | 0.006 | 0.021 |
| 2 | 15 | 0.011 | 0.012 | 0.003 | 0.016 |
| 3 | 15 | 0.010 | 0.011 | 0.004 | 0.017 |
| 4 | 15 | 0.013 | 0.014 | 0.006 | 0.021 |
| Dataset | Number of Points (#) | Runtime (s) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | UAV | T2–T1 | T3–T1 | T4–T1 | T5–T1 | UAV-TLS | |
| 1 | 954,882 | 602,360 | 809,091 | 721,898 | 814,046 | 698,577 | 17.08 | 19.35 | 19.24 | 18.70 | 72.29 |
| 2 | 777,368 | 933,502 | 1,437,389 | 1,063,855 | 1,002,022 | 252,779 | 22.61 | 26.49 | 26.41 | 22.78 | 58.11 |
| 3 | 228,411 | 183,293 | 369,747 | 479,223 | 340,908 | 89,372 | 7.40 | 9.22 | 10.27 | 9.94 | 25.43 |
| 4 | 398,351 | 322,748 | 191,401 | 197,549 | 278,773 | 612,353 | 23.91 | 16.97 | 16.52 | 17.23 | 29.29 |
| Avg. of T2,3,4,5-T1: 17.76 | Avg.: 46.28 | ||||||||||
| Dataset | Deviations (m) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | T2 | T3 | T4 | T5 | ||||||
| MD | RMSE | MD | RMSE | MD | RMSE | MD | RMSE | MD | RMSE | |
| 1 | 0.015 | 0.017 | 0.024 | 0.031 | 0.014 | 0.016 | 0.013 | 0.015 | 0.025 | 0.031 |
| 2 | 0.025 | 0.032 | 0.014 | 0.017 | 0.017 | 0.021 | 0.018 | 0.022 | 0.019 | 0.022 |
| 3 | 0.013 | 0.016 | 0.011 | 0.015 | 0.013 | 0.015 | 0.006 | 0.005 | 0.012 | 0.013 |
| 4 | 0.033 | 0.037 | 0.032 | 0.038 | 0.029 | 0.031 | 0.022 | 0.030 | 0.032 | 0.039 |
| Dataset | Number of Trees # Nt | Deviations (m) | |||
|---|---|---|---|---|---|
| TLS | UAV | ||||
| MD | RMSE | MD | RMSE | ||
| 1 | 11 | 0.239 | 0.422 | 0.045 | 0.096 |
| 2 | 11 | 0.616 | 1.075 | 0.545 | 0.919 |
| 3 | 11 | 0.166 | 0.241 | 0.018 | 0.060 |
| 4 | 15 | 0.041 | 0.158 | 0.577 | 0.677 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, W.; Shao, J.; Jin, S.; Luo, L.; Ge, J.; Peng, X.; Zhou, G. Automated Marker-Free Registration of Multisource Forest Point Clouds Using a Coarse-to-Global Adjustment Strategy. Forests 2021, 12, 269. https://doi.org/10.3390/f12030269
Zhang W, Shao J, Jin S, Luo L, Ge J, Peng X, Zhou G. Automated Marker-Free Registration of Multisource Forest Point Clouds Using a Coarse-to-Global Adjustment Strategy. Forests. 2021; 12(3):269. https://doi.org/10.3390/f12030269
Chicago/Turabian StyleZhang, Wuming, Jie Shao, Shuangna Jin, Lei Luo, Junling Ge, Xinyue Peng, and Guoqing Zhou. 2021. "Automated Marker-Free Registration of Multisource Forest Point Clouds Using a Coarse-to-Global Adjustment Strategy" Forests 12, no. 3: 269. https://doi.org/10.3390/f12030269