

Switching Frequency Limited Hysteresis Based Voltage Mode Control of Single-Phase Voltage Source Inverters
 ,
,
Abstract
:1. Introduction
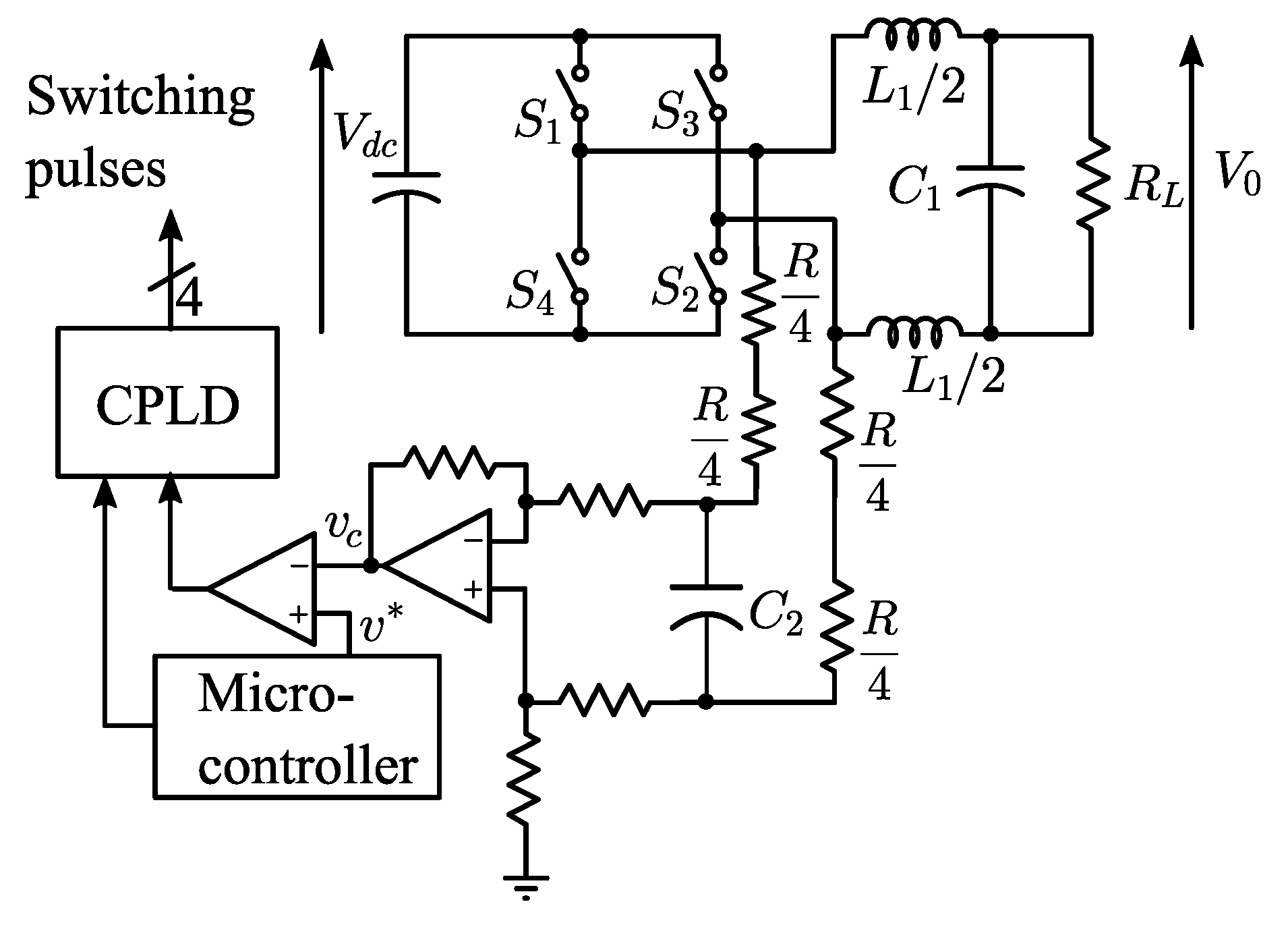
2. System Description
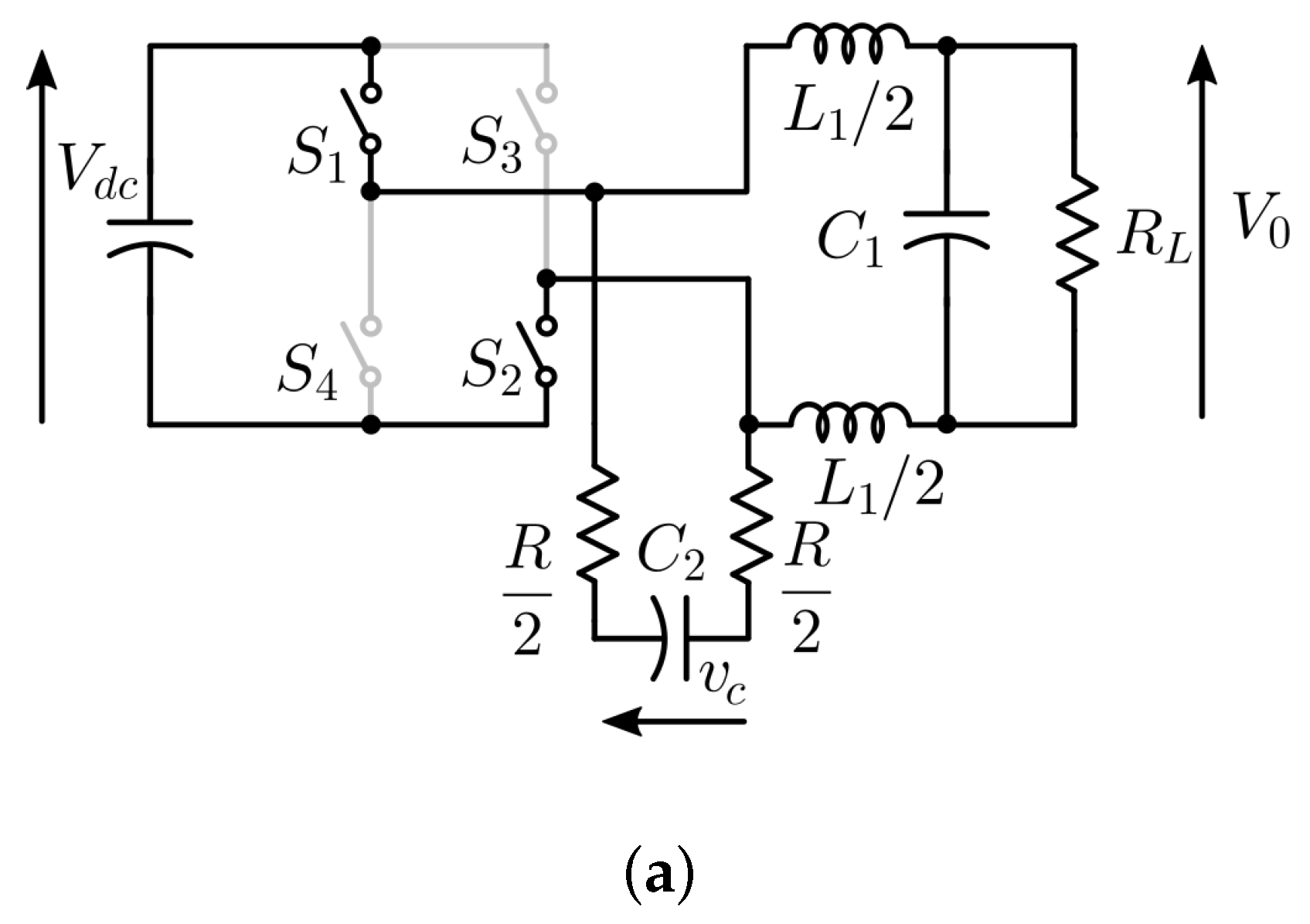
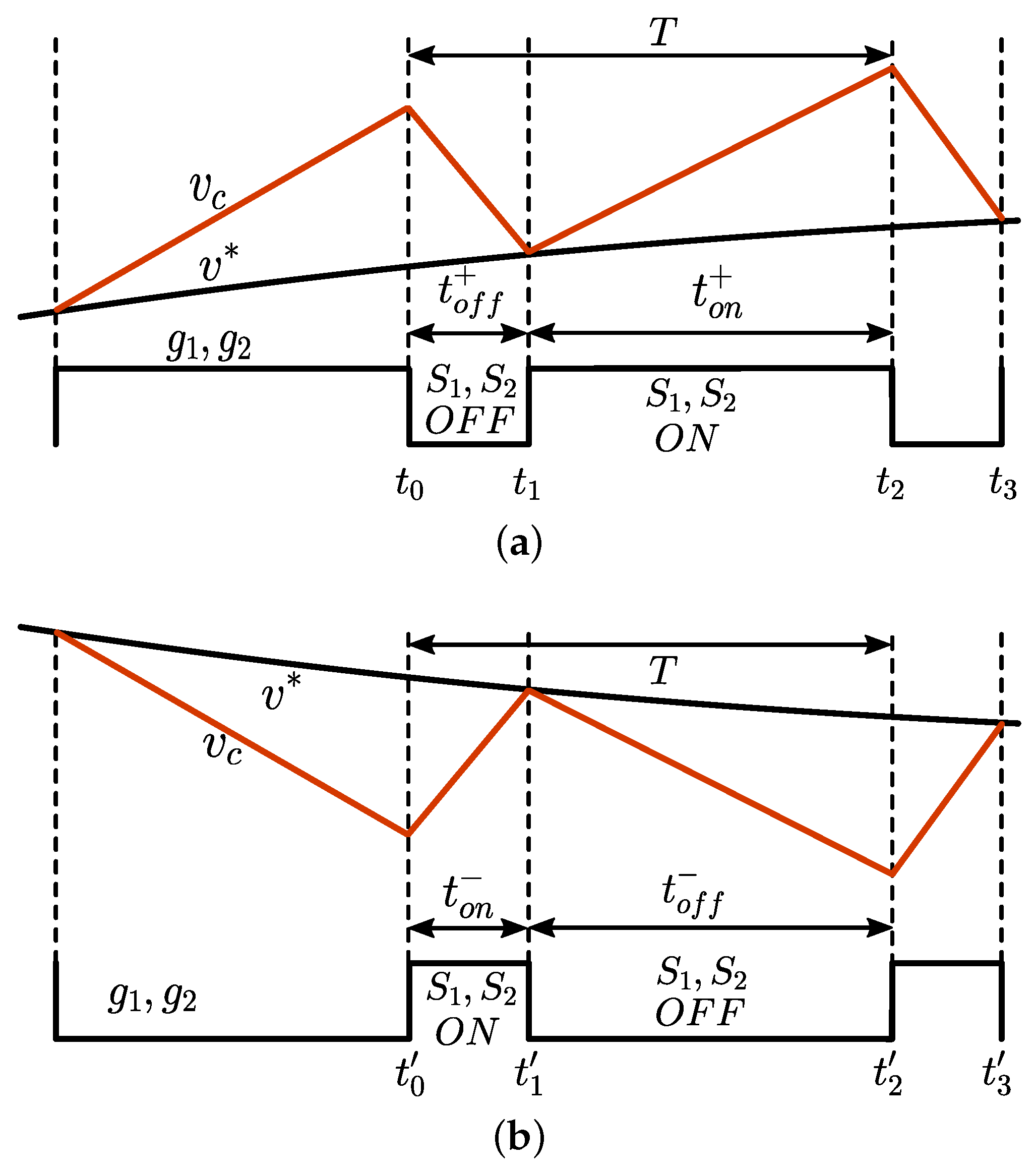
2.1. Case I: Slope of the Capacitor Voltage () during Positive Half Cycle of the Reference Signal
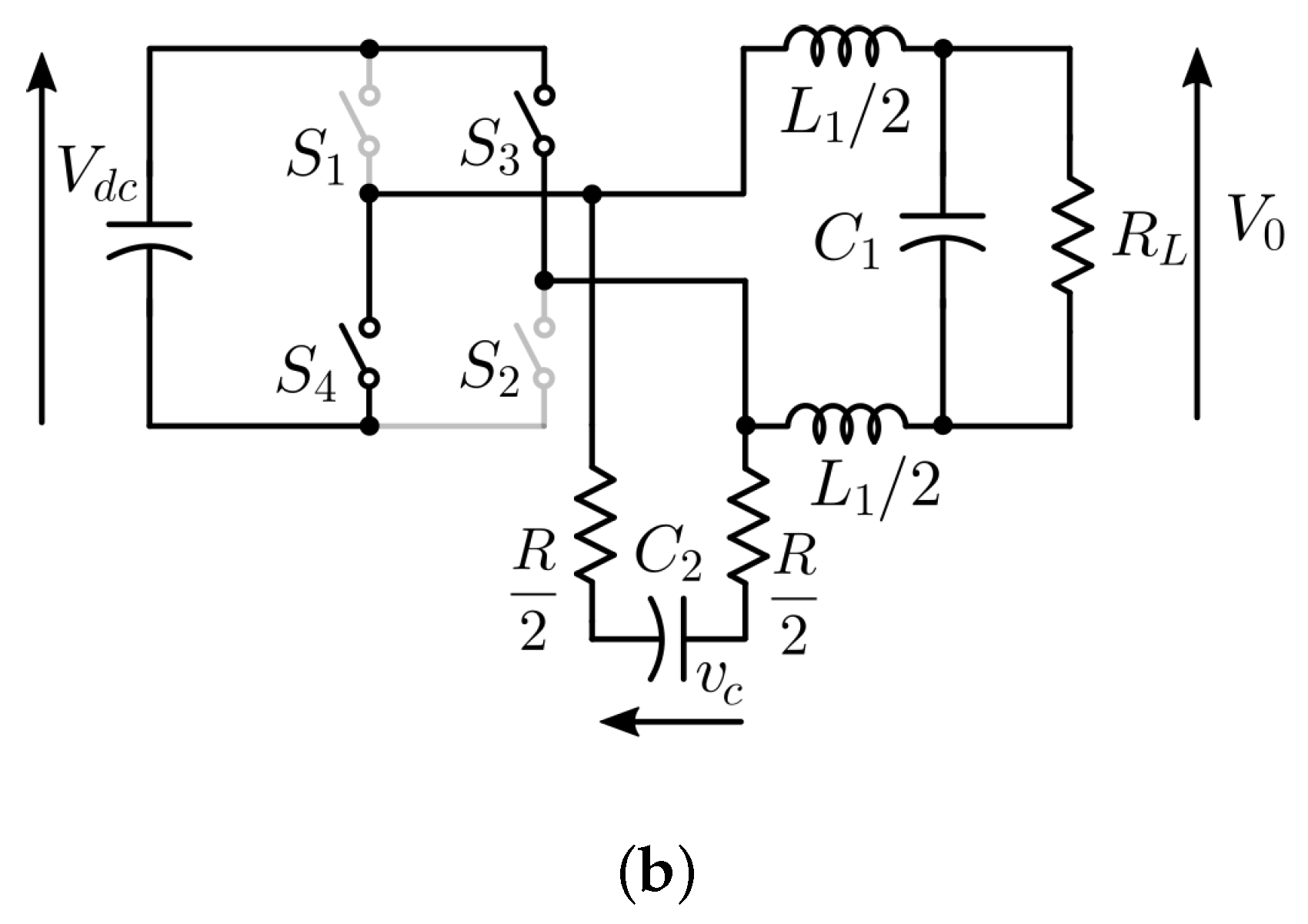
2.2. Case II: Slope of the Capacitor Voltage during the Negative Half Cycle of the Reference Signal
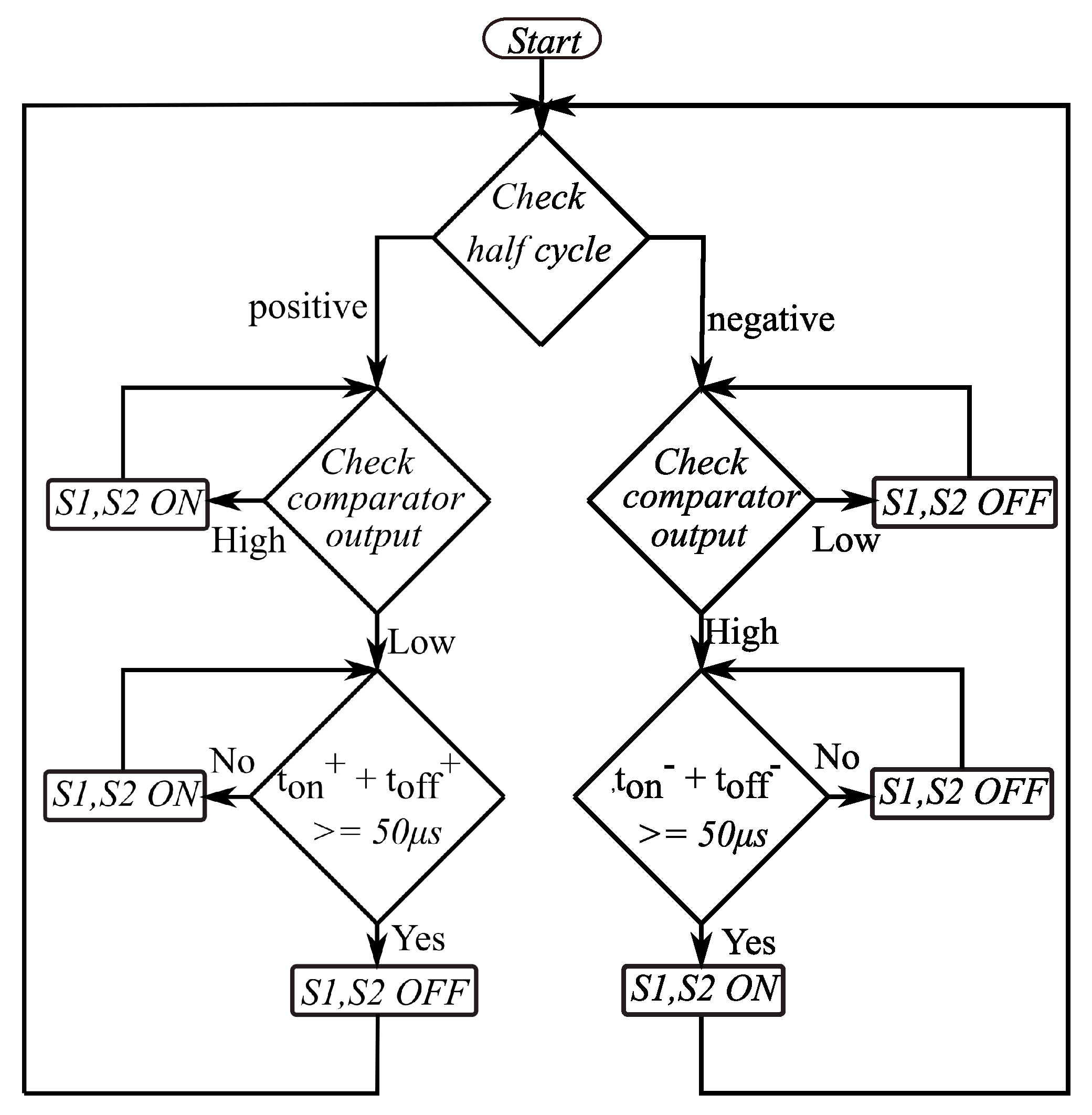
3. Implementation of the Proposed Switching Algorithm
3.1. Switching Criteria during the Positive Half Cycle of Reference Sine Wave
3.2. Switching Criteria for the Negative Half Cycle of Reference Sine Wave
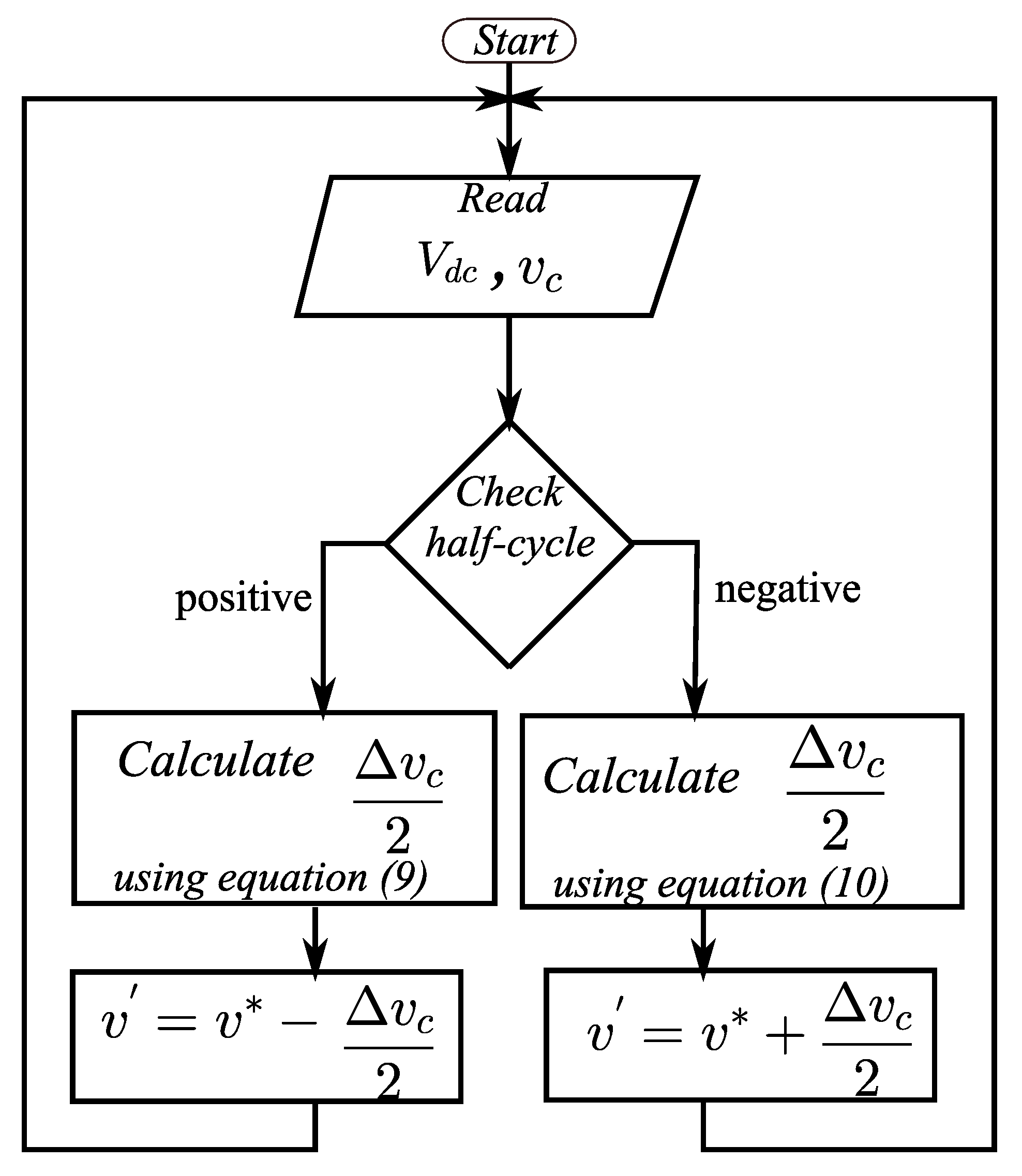
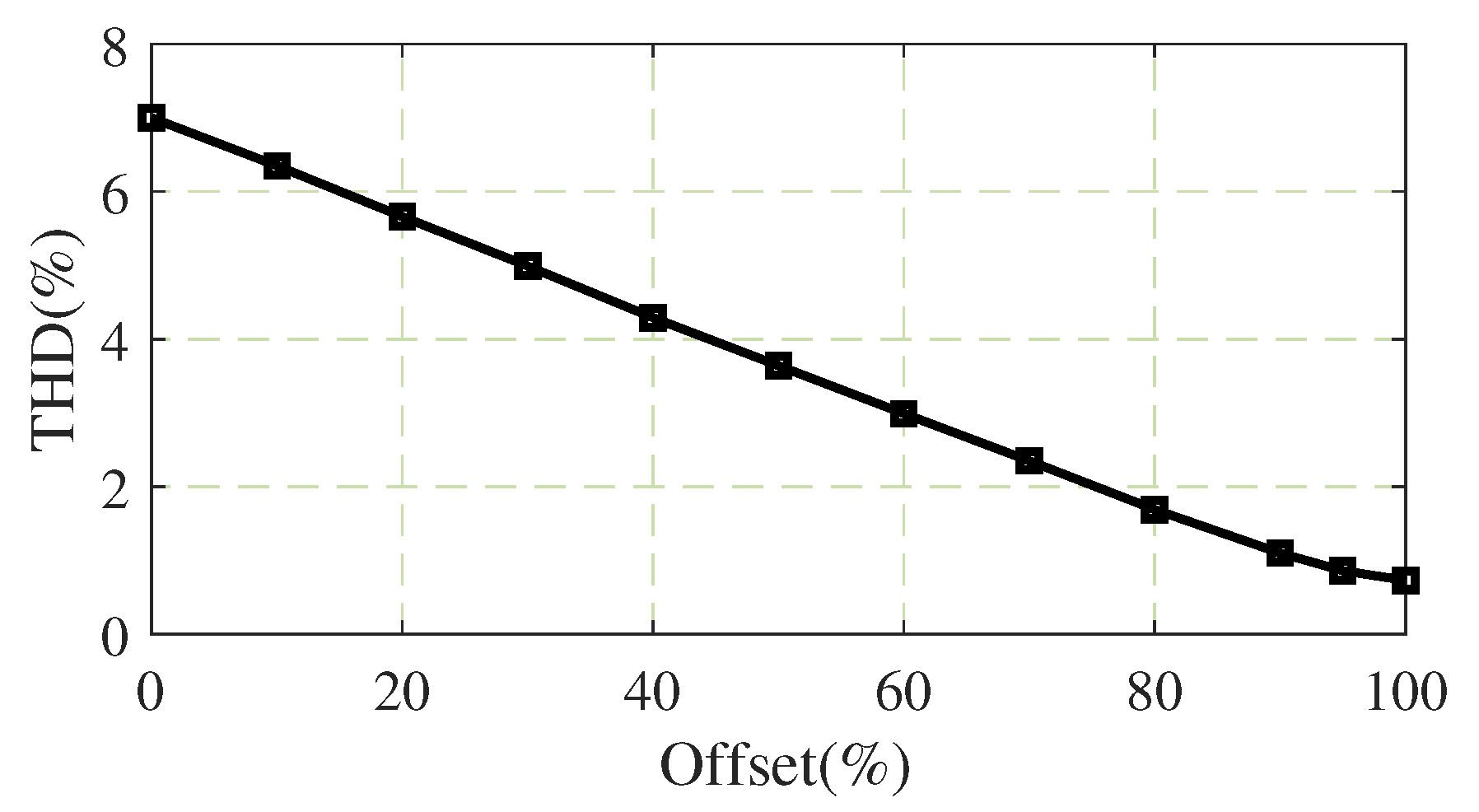
3.3. Computation of Offset Voltage
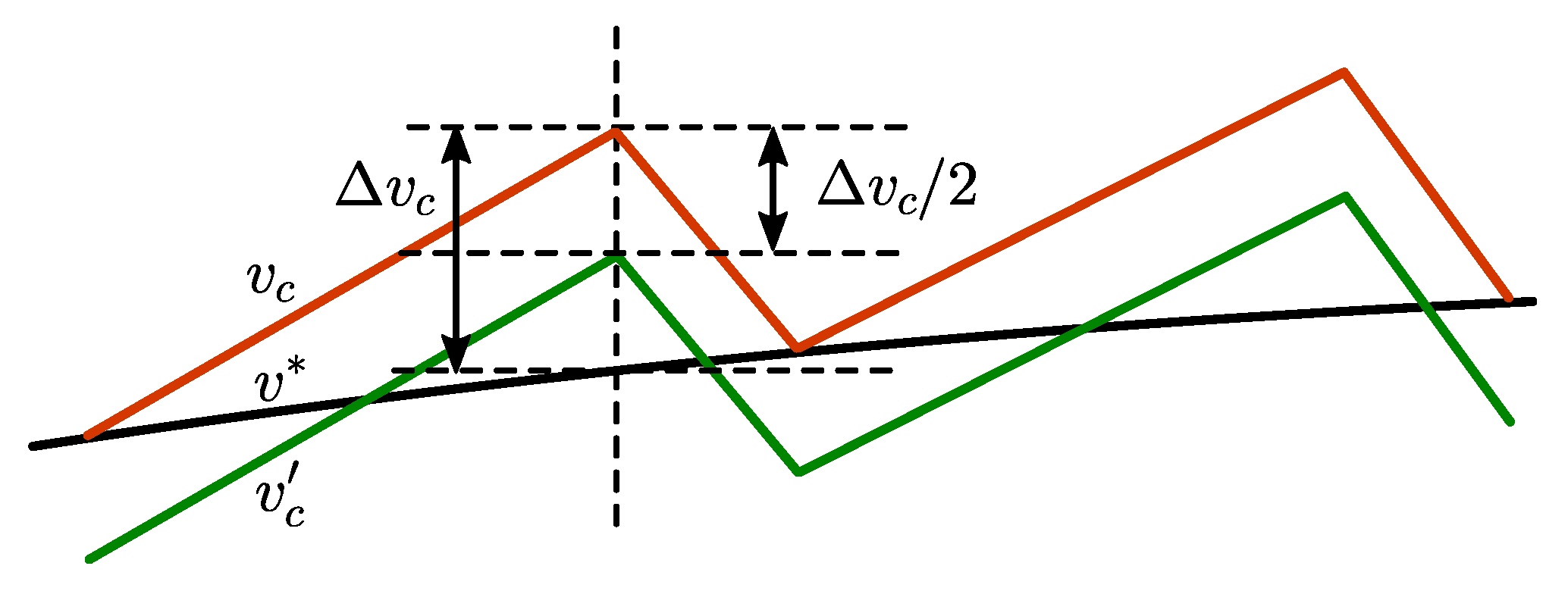
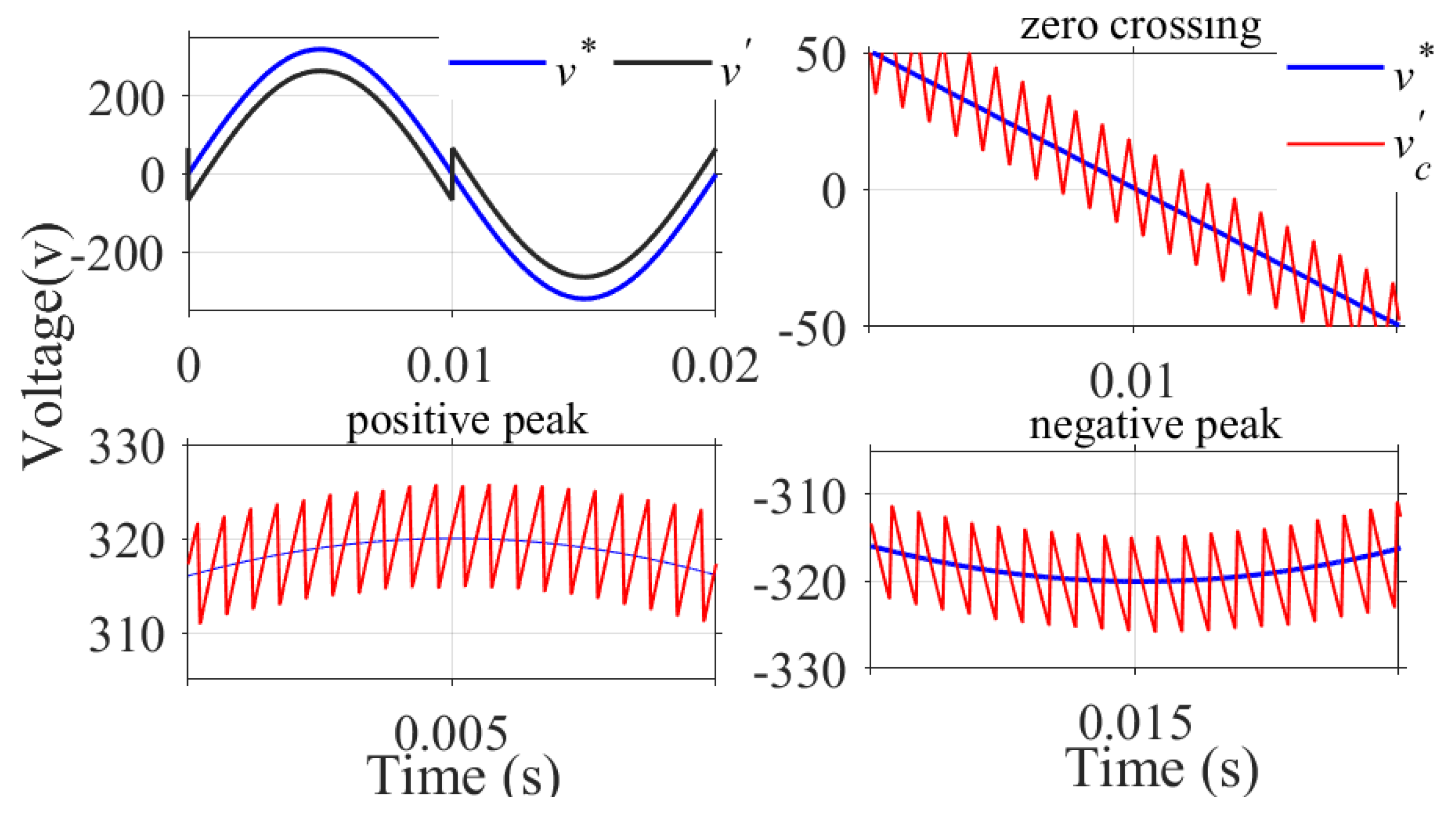
3.4. Modification of the Reference Sine Wave
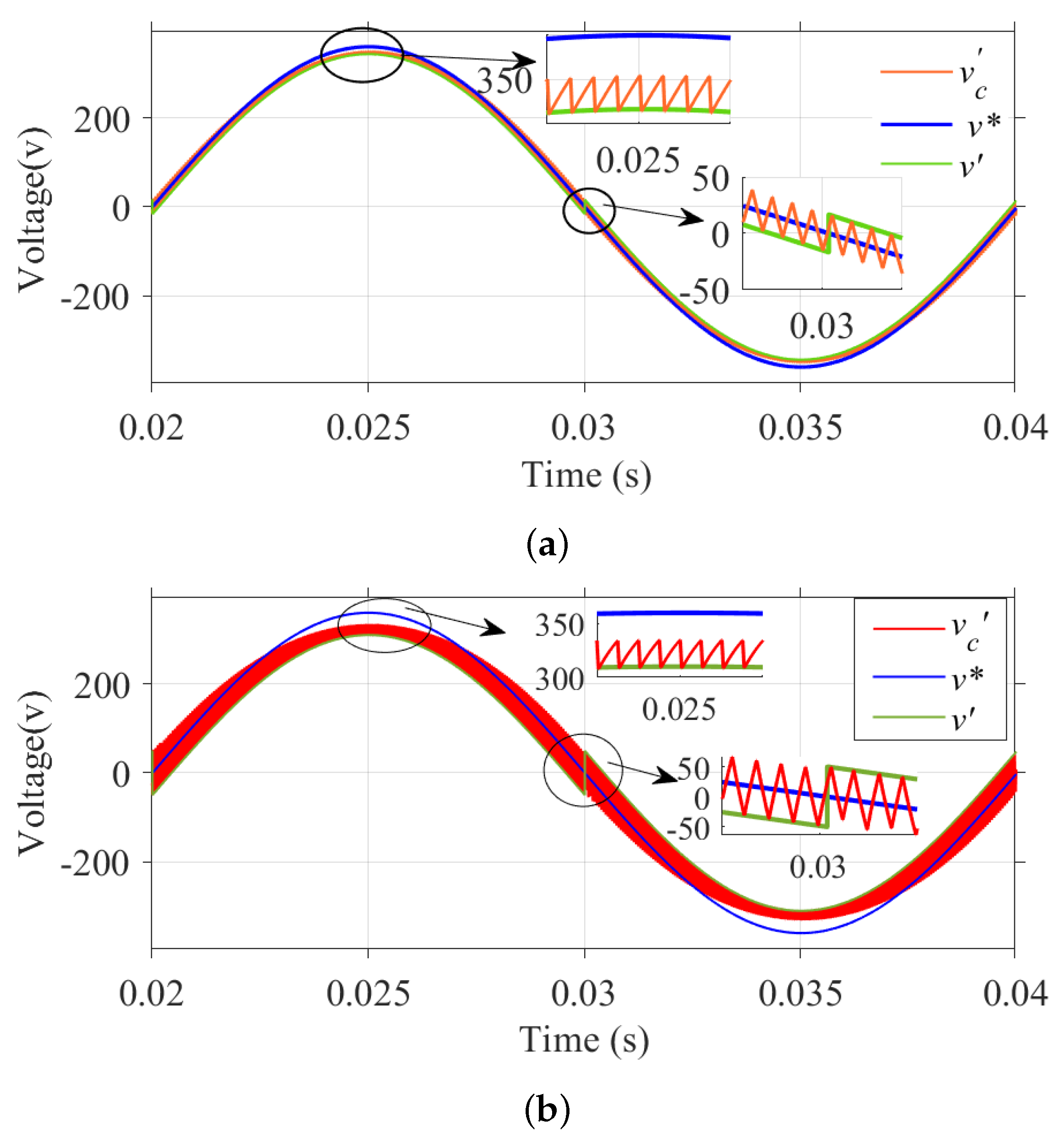
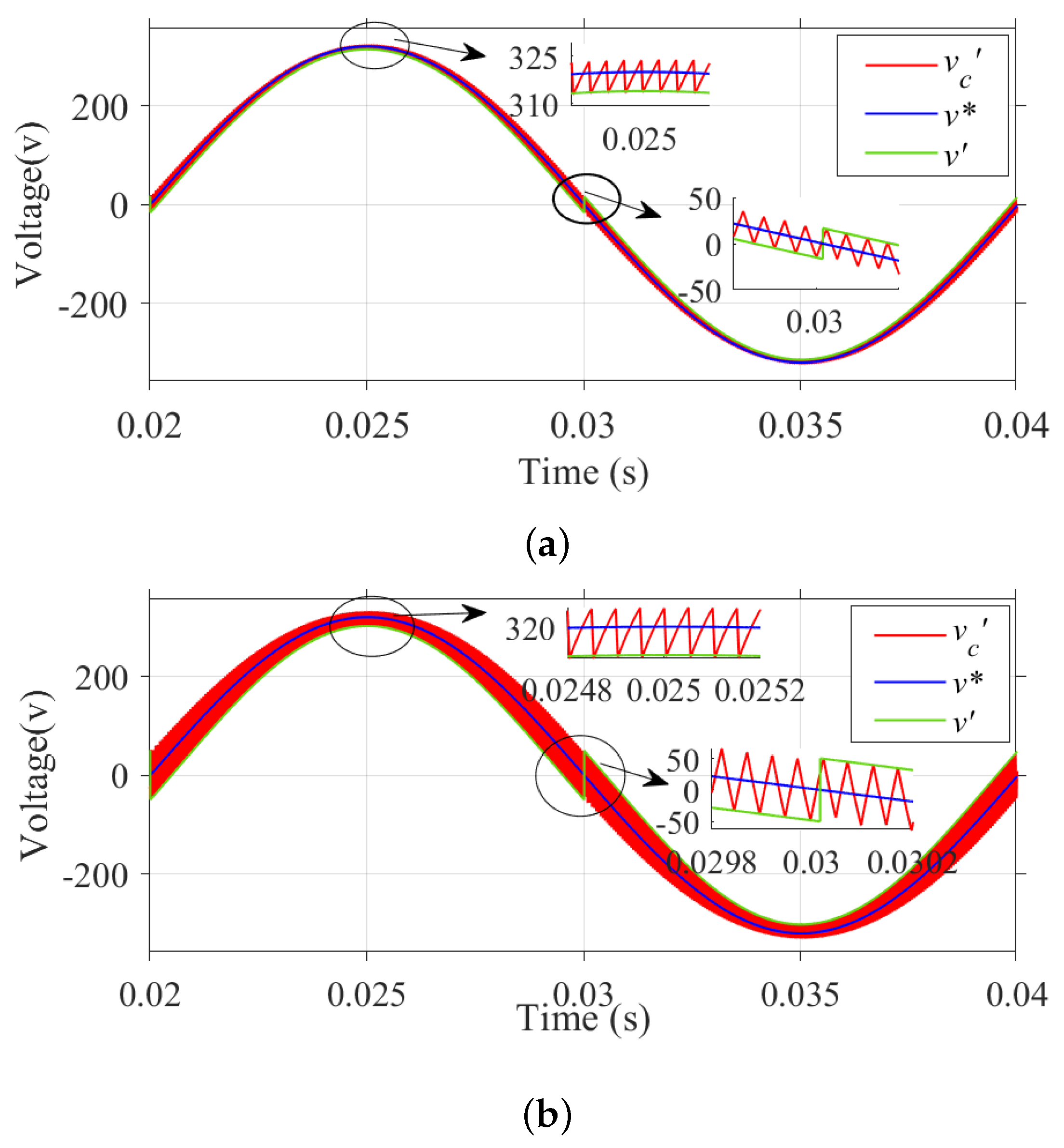
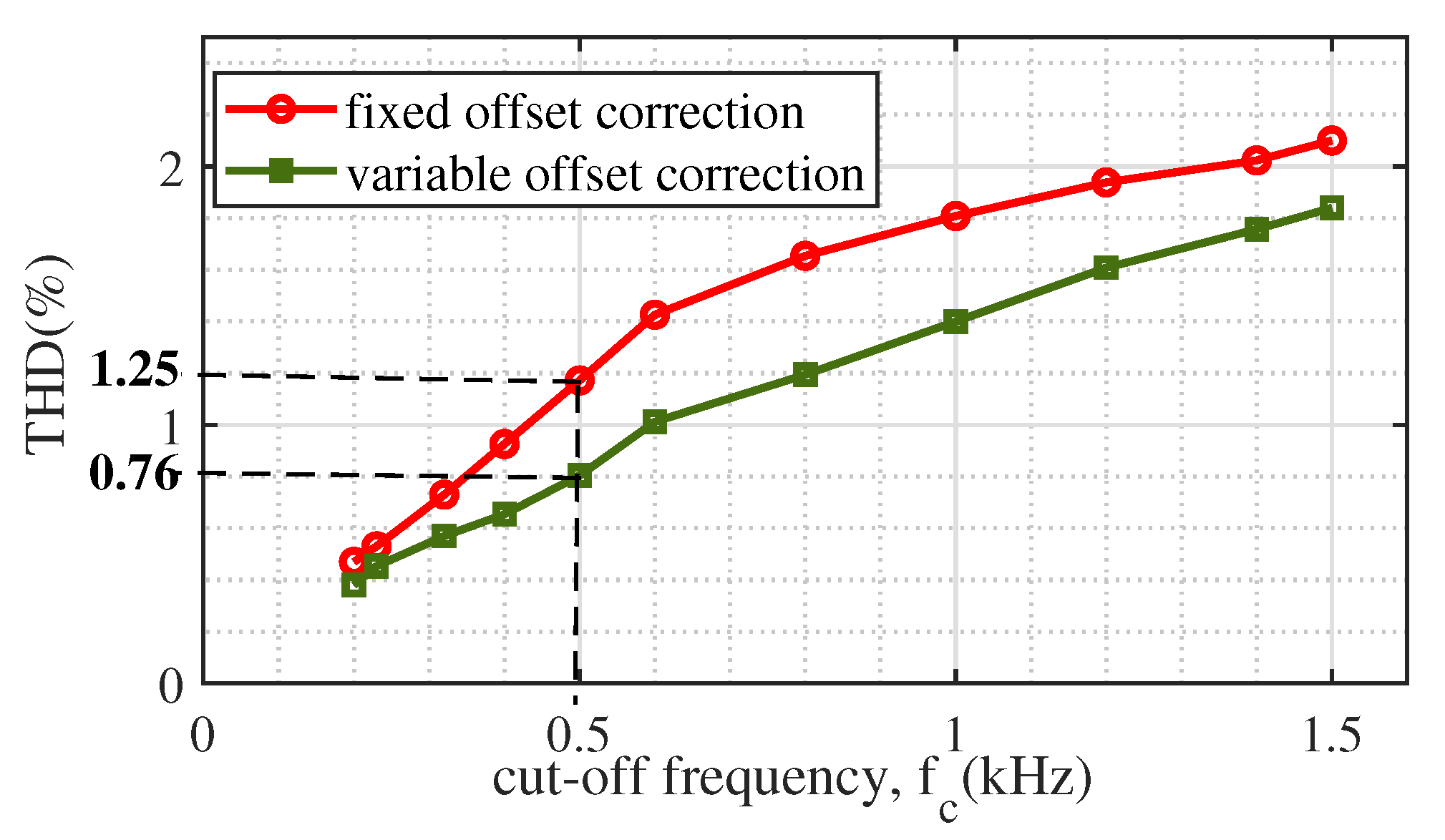
3.4.1. Fixed Offset Correction
3.4.2. Variable Offset Correction
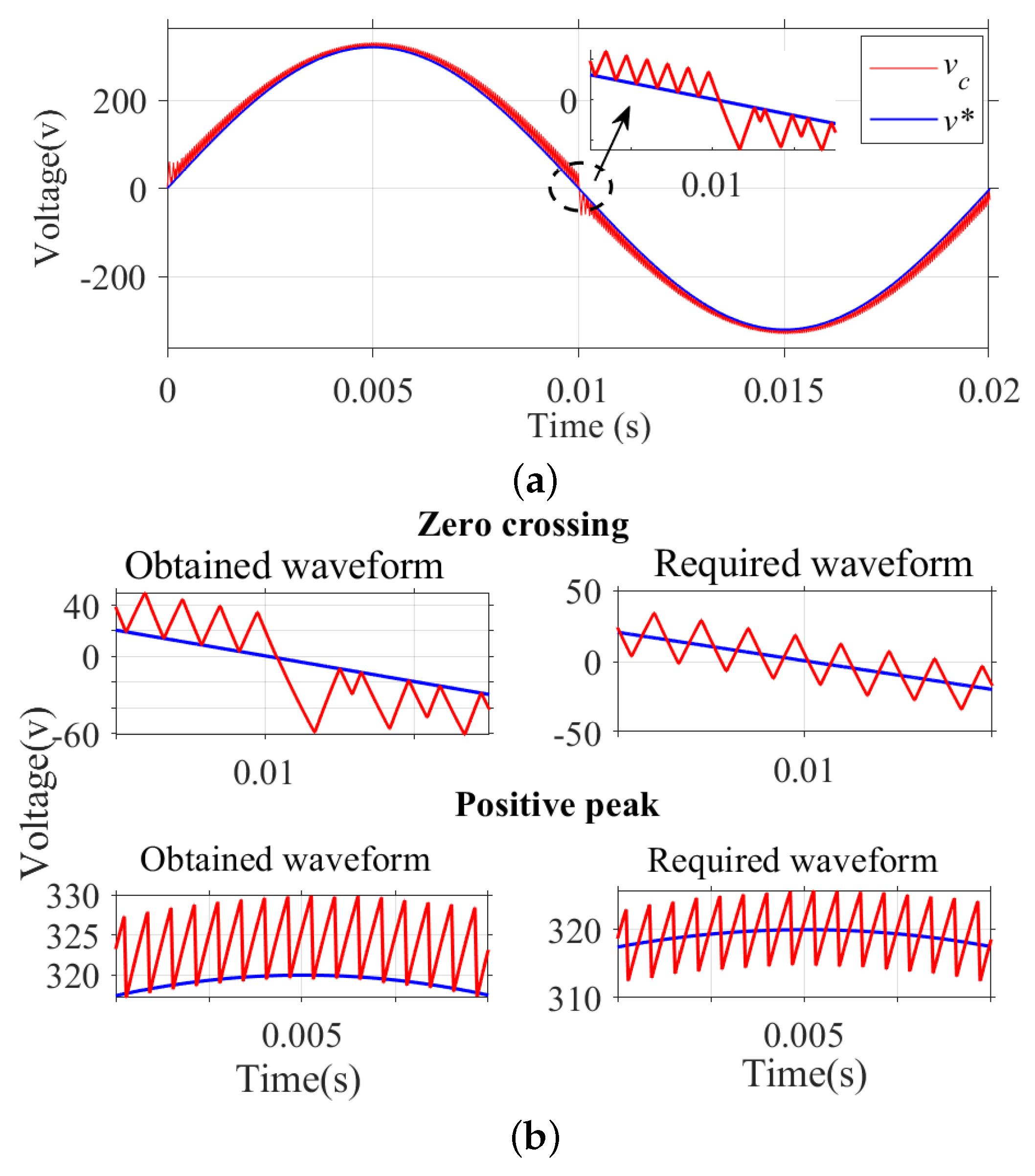
4. Simulation Results
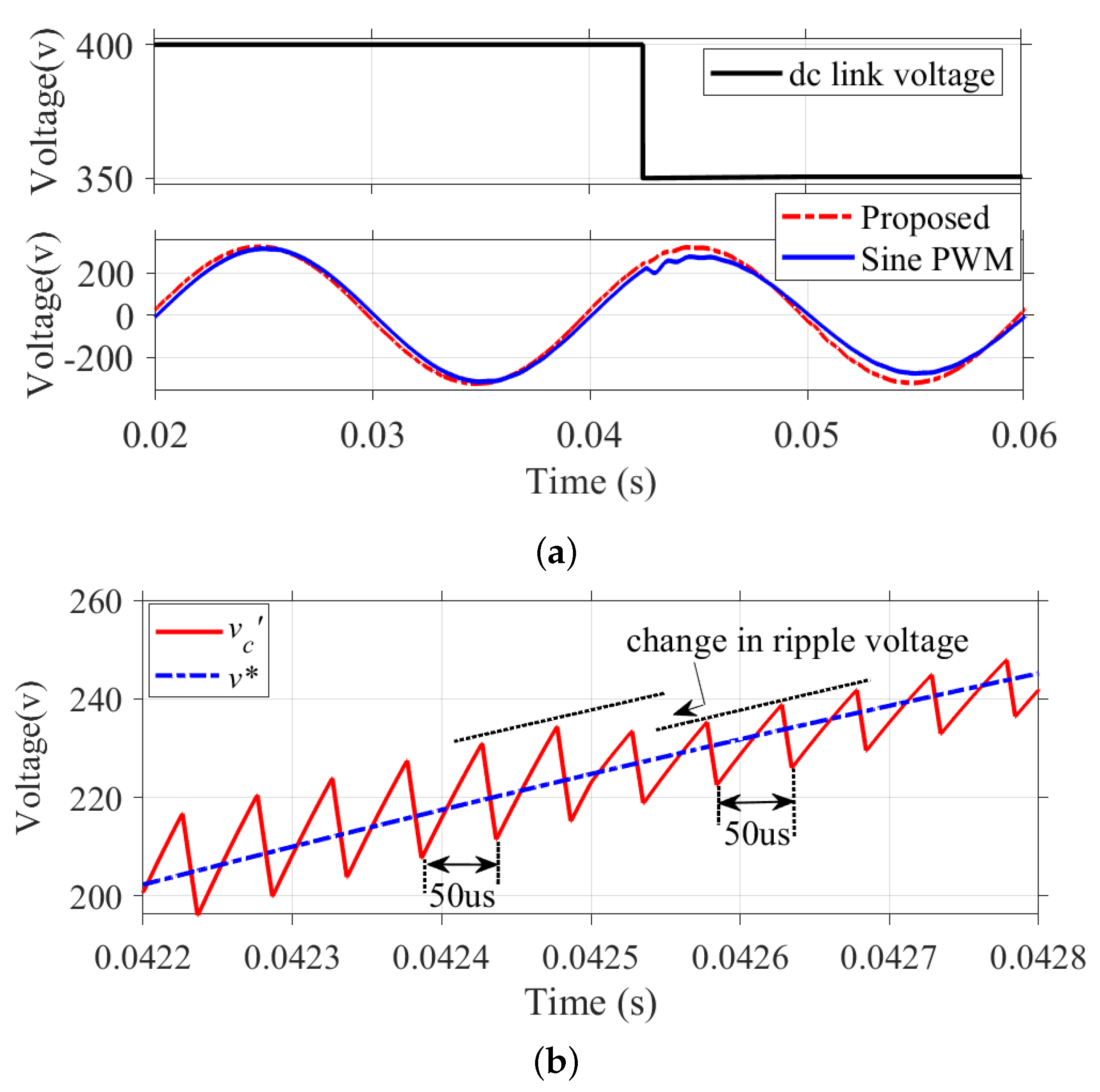
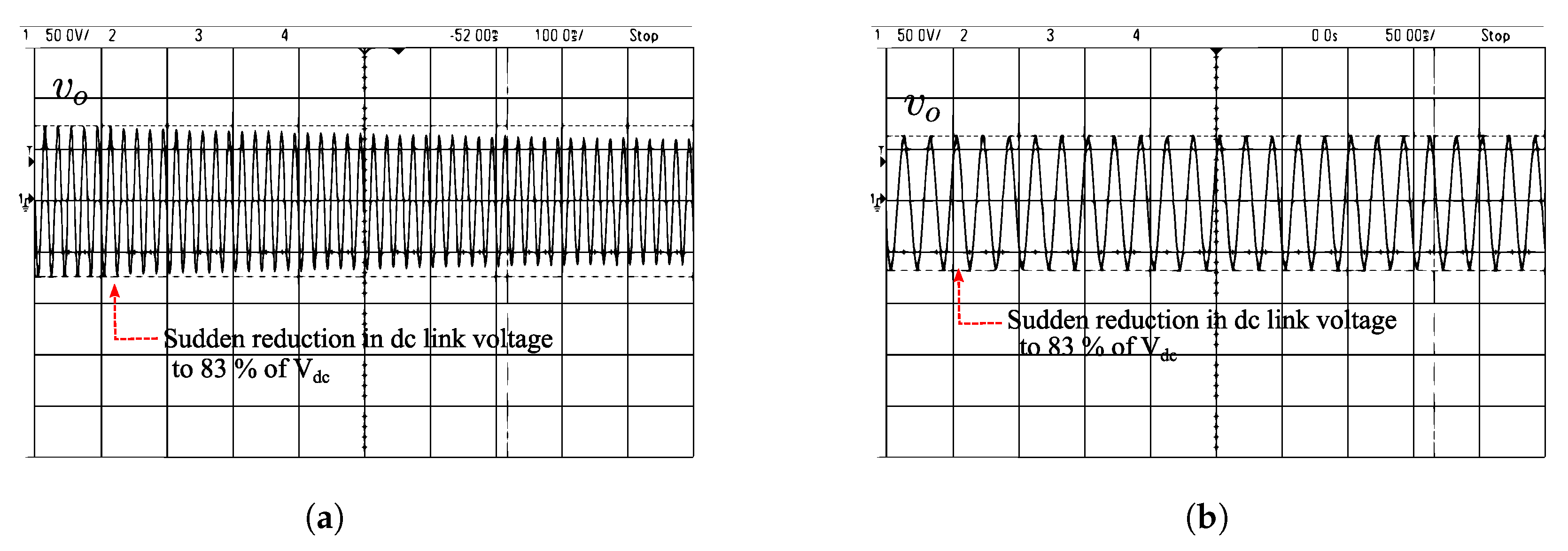
4.1. System Response to Variations in DC Bus Voltage
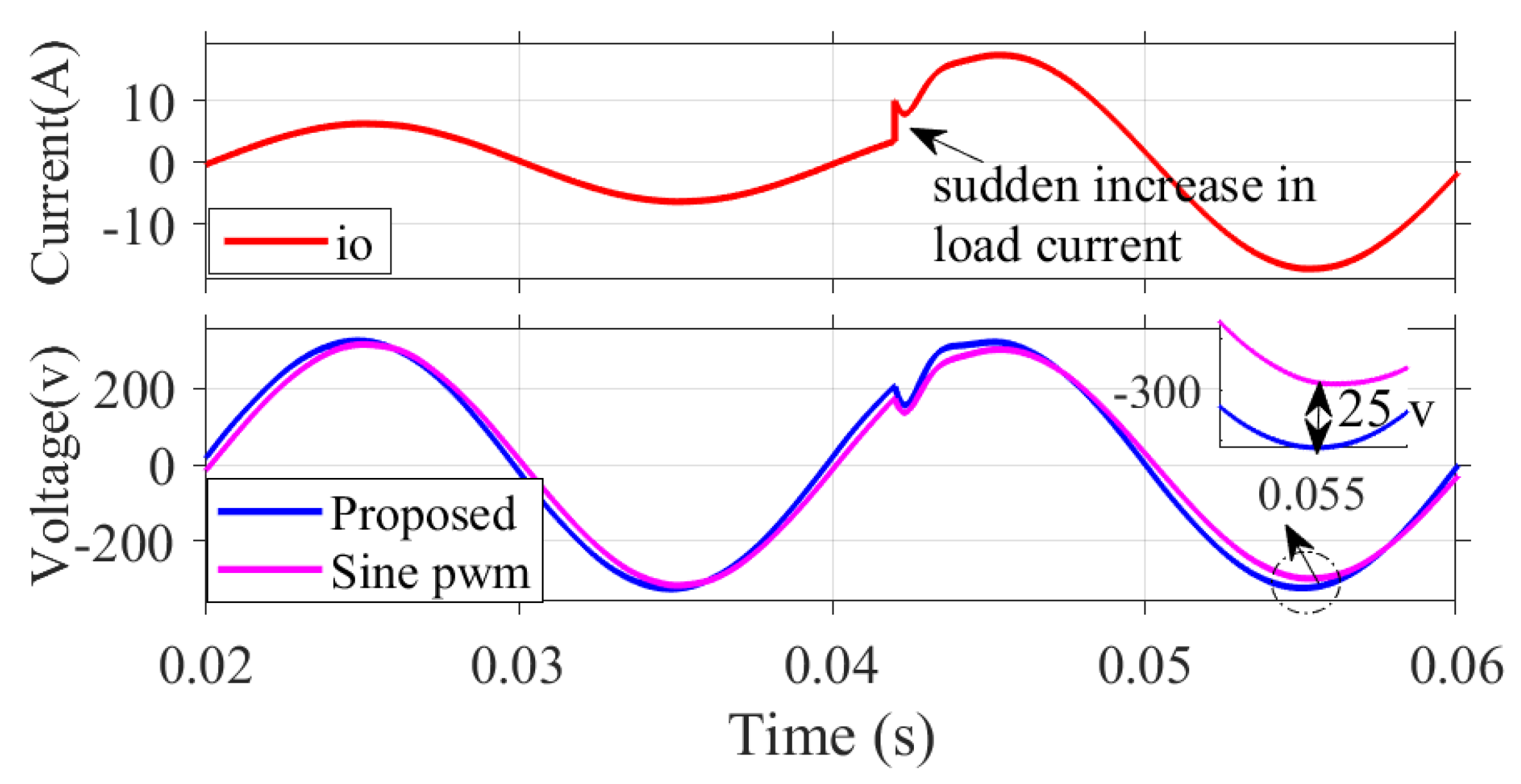
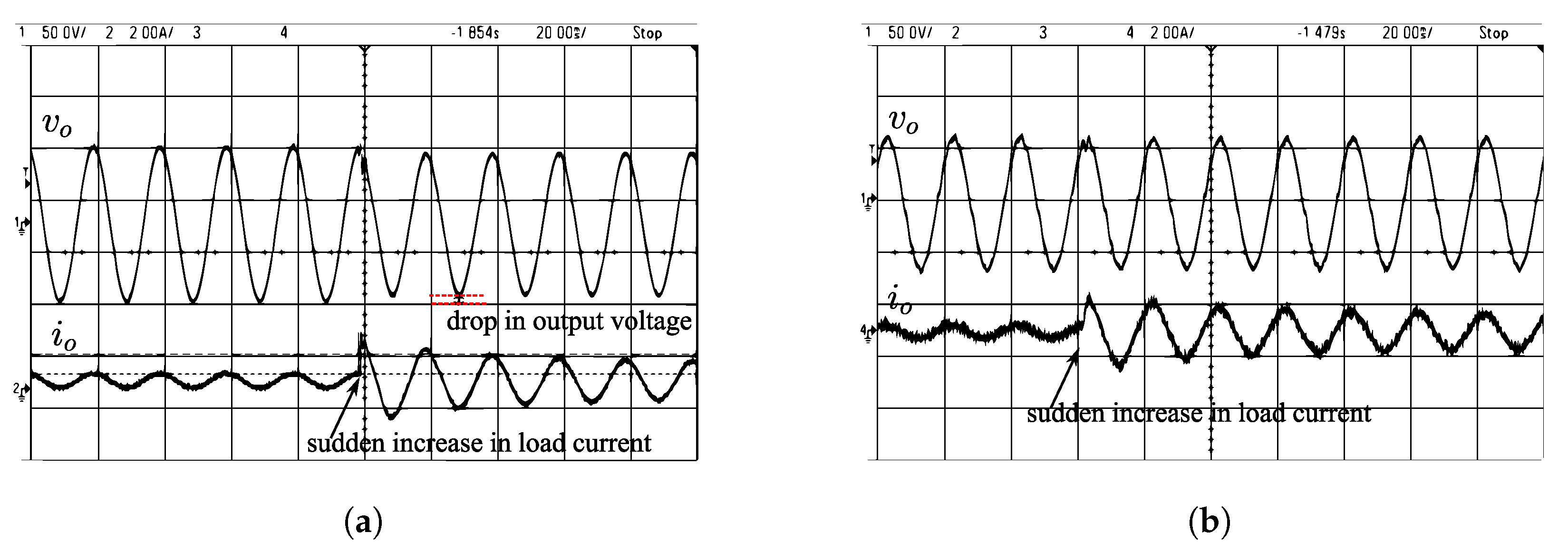
4.2. System Response to Load Variations
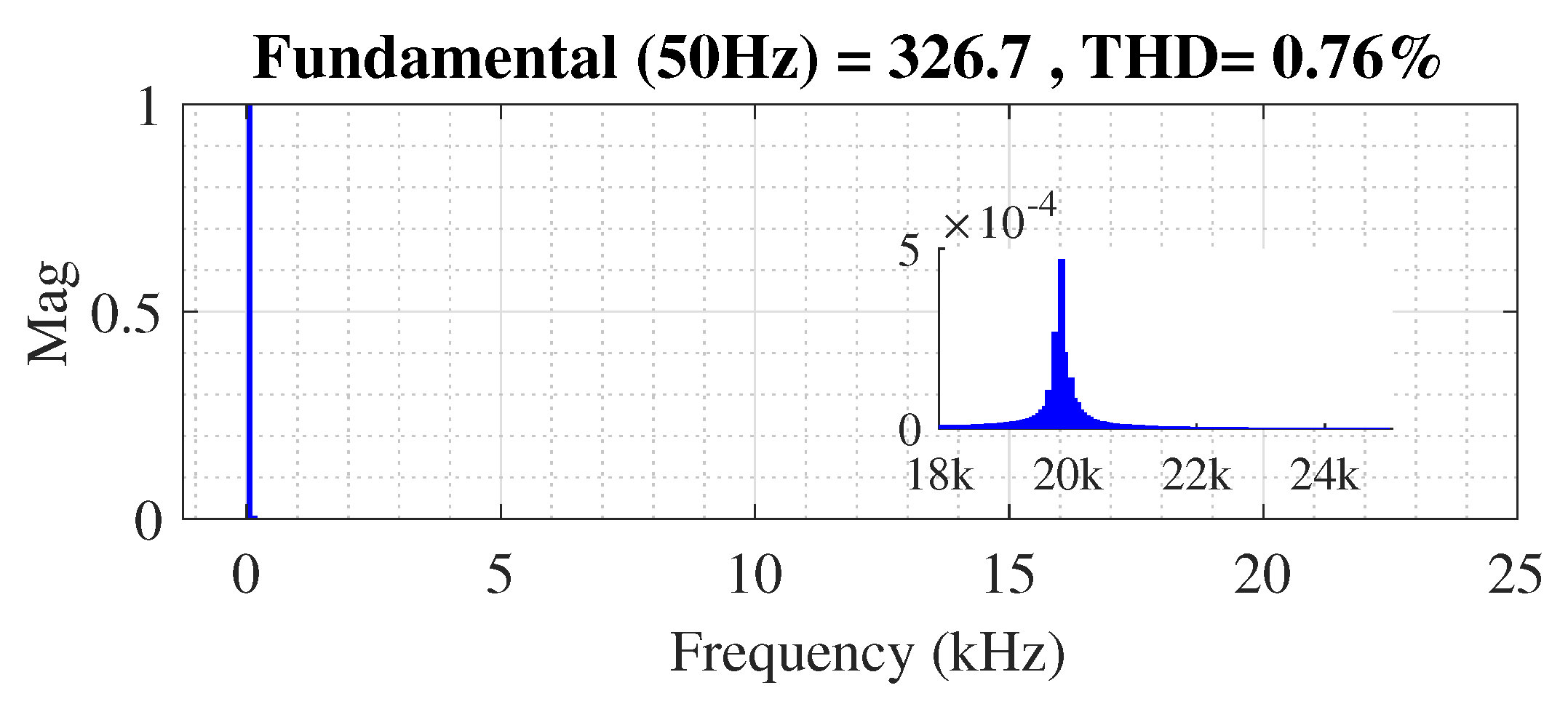
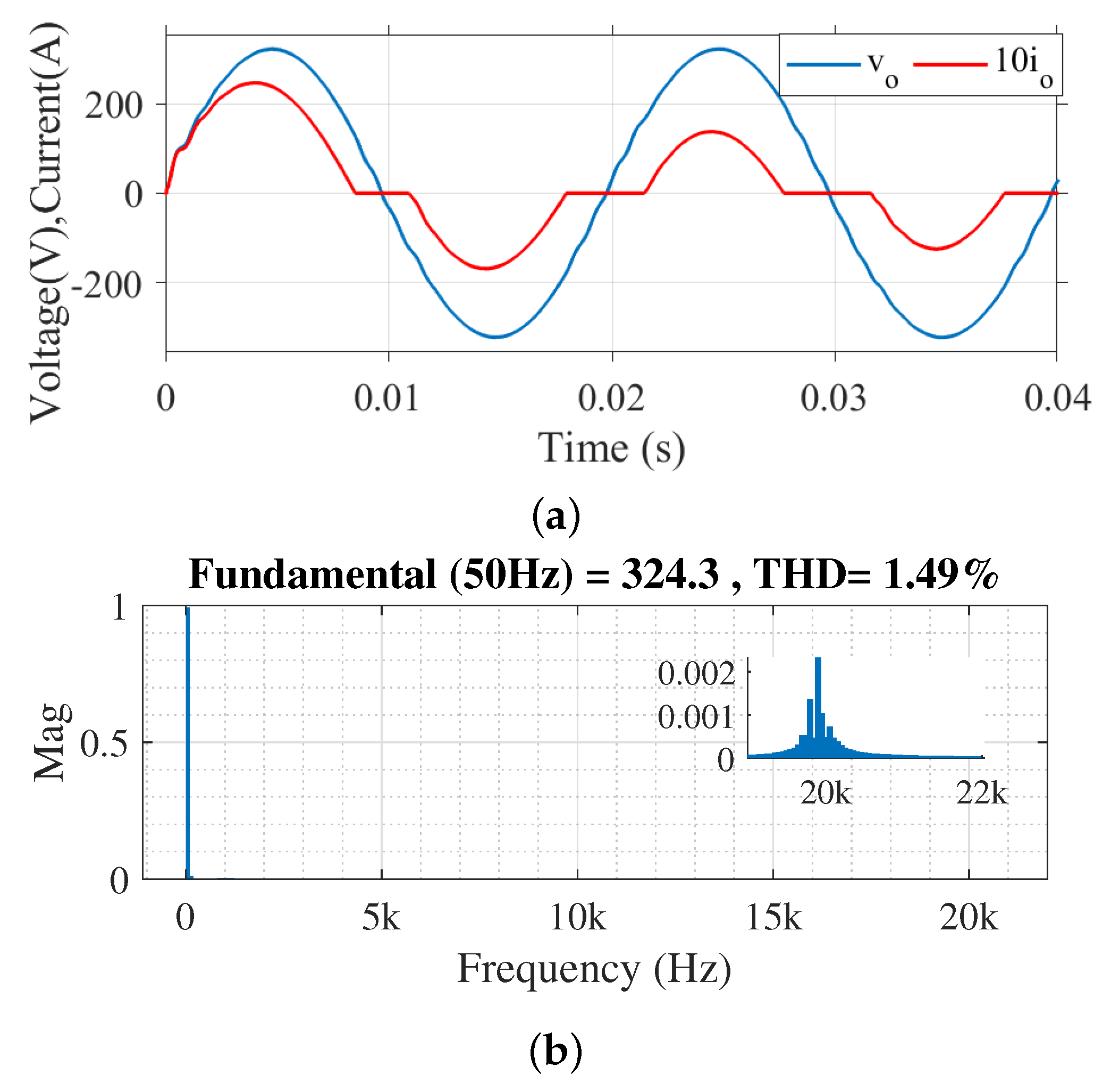
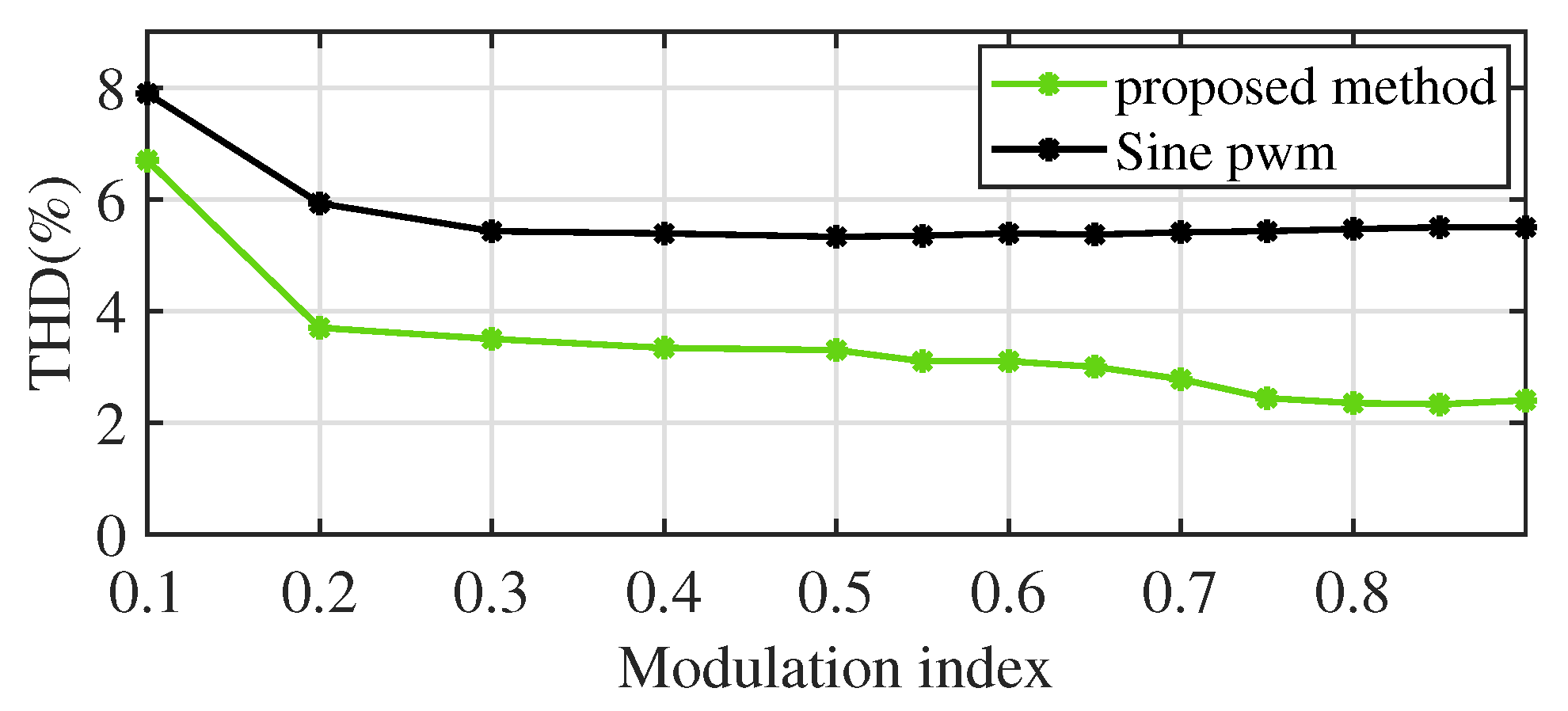
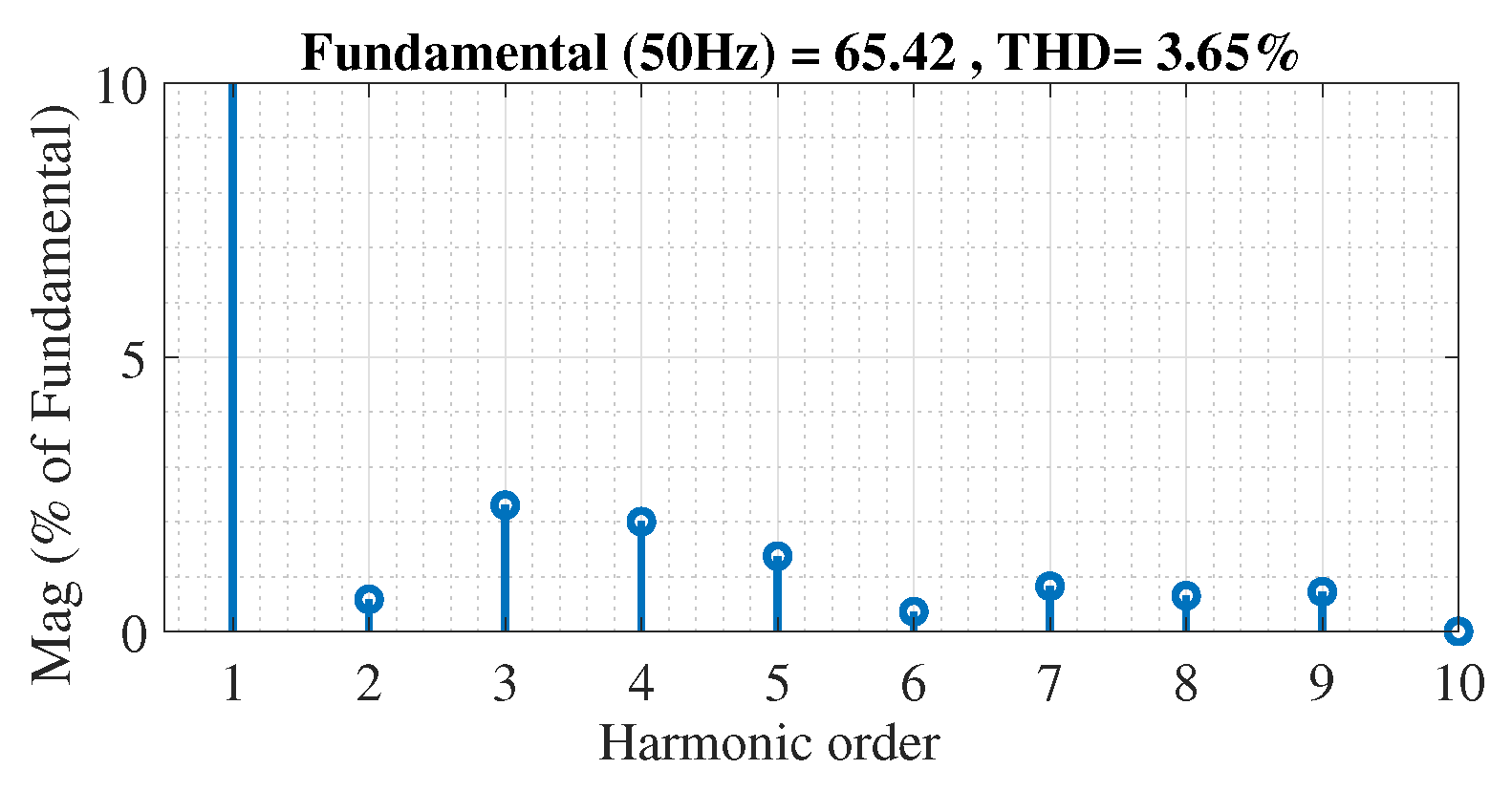
4.3. THD Comparison with Conventional Sine PWM
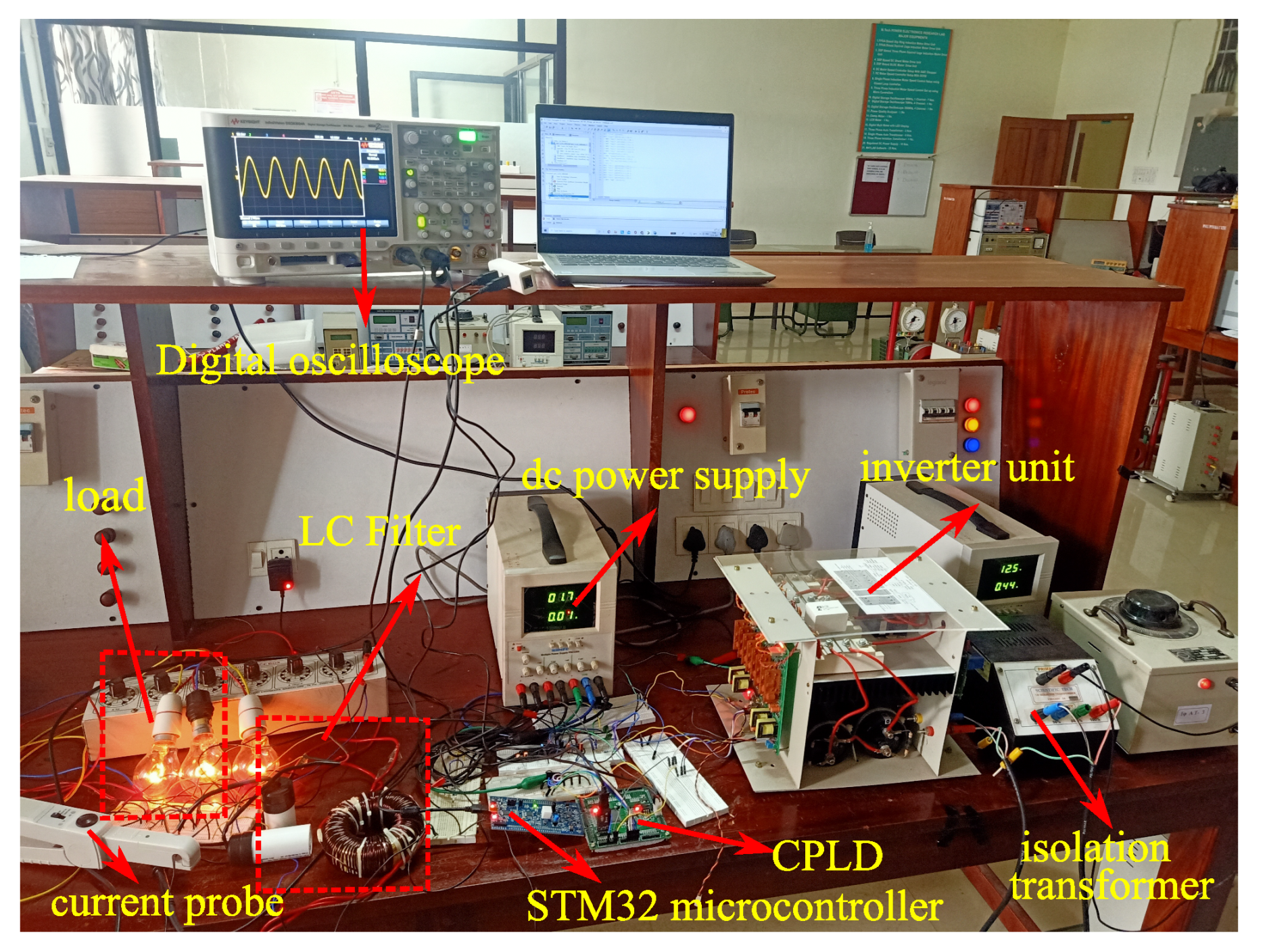
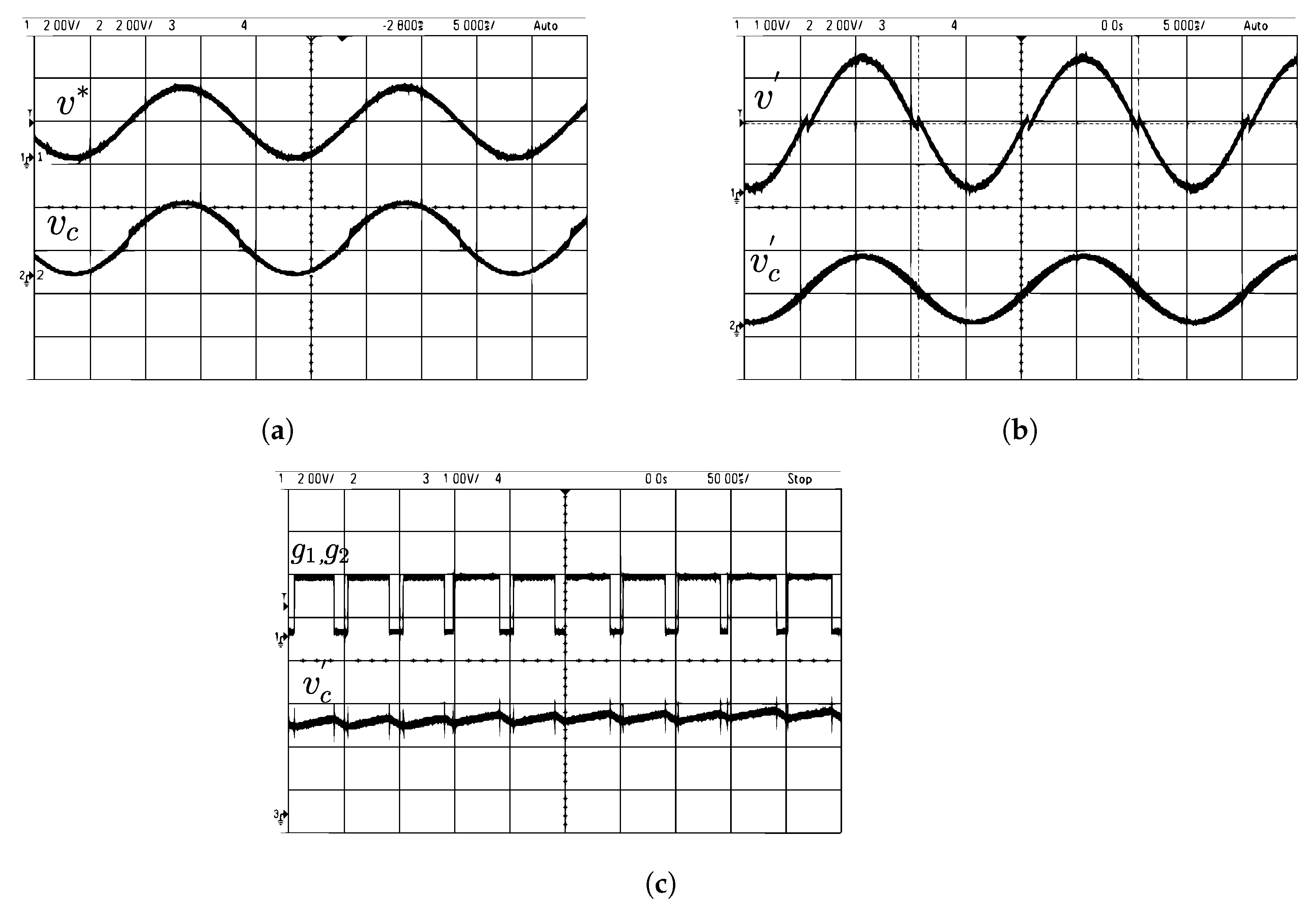
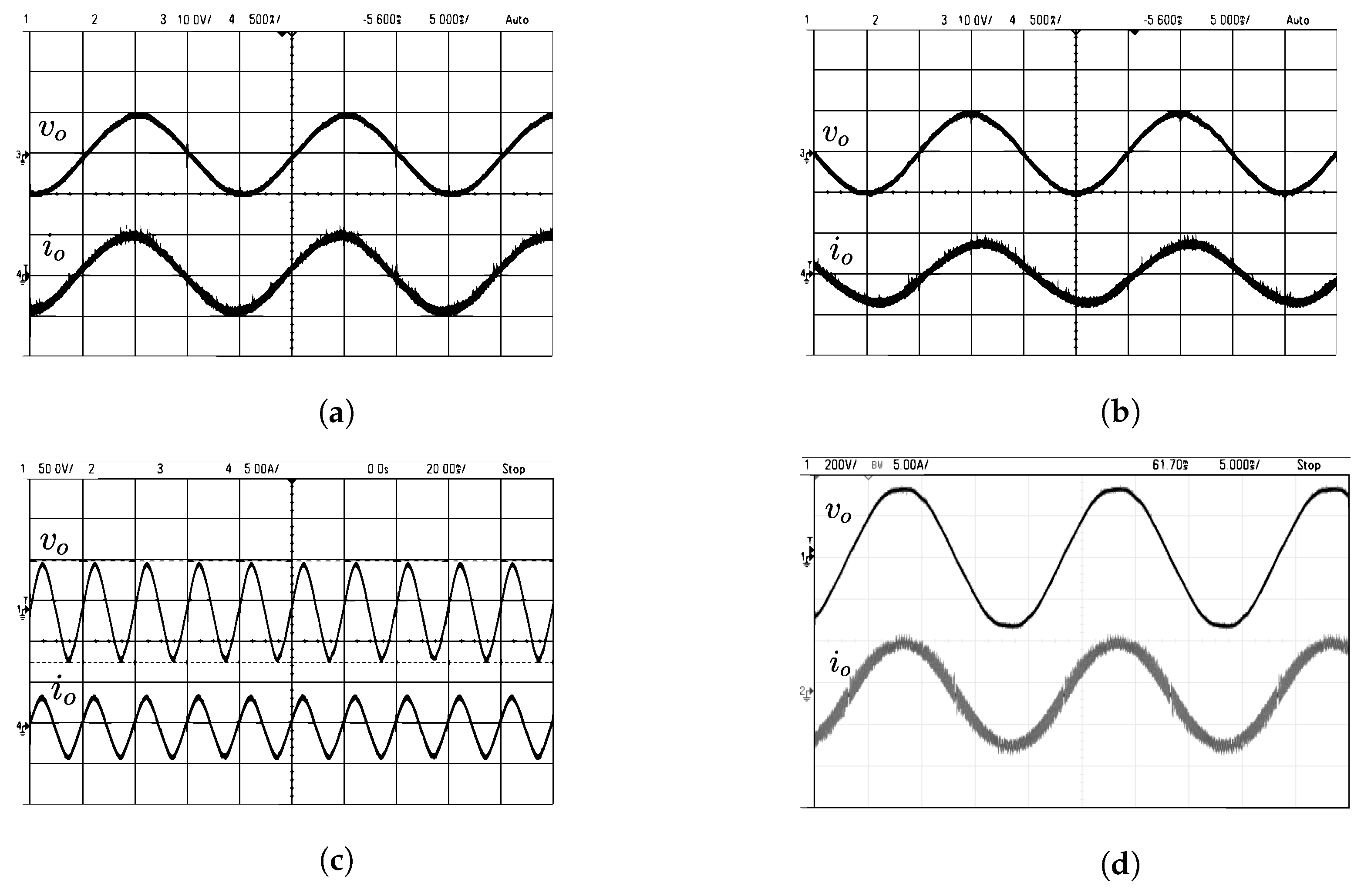
5. Hardware Implementation
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Vithayathil, J. Power Electronics Principles and Applications; McGraw Hill Education: New York, NY, USA, 2010. [Google Scholar]
- Moustafa, M.M.Z.; Aboushal, M.A.; EL-Fouly, T.H.; Al-Durra, A.; Zeineldin, H. A novel unified controller for grid-connected and islanded operation of PV-fed single-stage inverter. IEEE Trans. Sustain. Energy 2021, 12, 1960–1973. [Google Scholar] [CrossRef]
- Xue, Y.; Chang, L.; Kjaer, S.B.; Bordonau, J.; Shimizu, T. Topologies of single-phase inverters for small distributed power generators: An overview. IEEE Trans. Power Electron. 2004, 19, 1305–1314. [Google Scholar] [CrossRef]
- Habibullah, A.F.; Yoon, S.-J.; Tran, T.V.; Kim, Y.; Tran, D.T.; Kim, K.-H. The Recent Development of Power Electronics and AC Machine Drive Systems. Energies 2022, 15, 7913. [Google Scholar] [CrossRef]
- Gonzales-Zurita, Ó.; Clairand, J.M.; Peñalvo-López, E.; Escrivá-Escrivá, G. Review on multi-objective control strategies for distributed generation on inverter-based microgrids. Energies 2020, 13, 3483. [Google Scholar] [CrossRef]
- Hava, A.; Kerkman, R.; Lipo, T. Carrier-based PWM-VSI overmodulation strategies: Analysis, comparison, and design. IEEE Trans. Power Electron. 1998, 13, 674–689. [Google Scholar] [CrossRef] [Green Version]
- Holtz, J.; Lotzkat, W.; Khambadkone, A.M. On continuous control of PWM inverters in the overmodulation range including the six-step mode. IEEE Trans. Power Electron. 1993, 8, 546–553. [Google Scholar] [CrossRef]
- Jacobina, C.; Nogueira Lima, A.; da Silva, E.; Alves, R.; Seixas, P. Digital scalar pulse-width modulation: A simple approach to introduce nonsinusoidal modulating waveforms. IEEE Trans. Power Electron. 2001, 16, 351–359. [Google Scholar] [CrossRef]
- Bolognani, S.; Zigliotto, M. Novel digital continuous control of SVM inverters in the overmodulation range. IEEE Trans. Ind. Appl. 1997, 33, 525–530. [Google Scholar] [CrossRef]
- Van Der Broeck, H.W.; Skudelny, H.C.; Stanke, G.V. Analysis and realization of a pulsewidth modulator based on voltage space vectors. IEEE Trans. Ind. Appl. 1988, 24, 142–150. [Google Scholar] [CrossRef]
- Zhou, K.; Wang, D. Relationship between space-vector modulation and three-phase carrier-based PWM: A comprehensive analysis [three-phase inverters]. IEEE Trans. Ind. Electron. 2002, 49, 186–196. [Google Scholar] [CrossRef]
- Rahman, M.A.; Quaicoe, J.E.; Choudhury, M.A. Performance Analysis of Delta Modulated PWM Inverters. IEEE Trans. Power Electron. 1987, 3, 227–233. [Google Scholar] [CrossRef]
- Abdel-Rahim, N.; Quaicoe, J. A single-phase delta-modulated inverter for UPS applications. IEEE Trans. Ind. Electron. 1993, 40, 347–354. [Google Scholar] [CrossRef]
- Bowes, S.; Holliday, D.; Grewal, S. Comparison of single-phase three-level pulse width modulation strategies. IEE Proc.-Electr. Power Appl. 2004, 151, 205–214. [Google Scholar] [CrossRef]
- Rahman, K.; Khan, M.; Choudhury, M.; Rahman, M. Variable-band hysteresis current controllers for PWM voltage-source inverters. IEEE Trans. Power Electron. 1997, 12, 964–970. [Google Scholar] [CrossRef]
- Bose, B. An adaptive hysteresis-band current control technique of a voltage-fed PWM inverter for machine drive system. IEEE Trans. Ind. Electron. 1990, 37, 402–408. [Google Scholar] [CrossRef]
- Yao, Q.; Holmes, D. A simple, novel method for variable-hysteresis-band current control of a three phase inverter with constant switching frequency. In Proceedings of the Conference Record of the 1993 IEEE Industry Applications Conference Twenty-Eighth IAS Annual Meeting, Toronto, ON, Canada, 2–8 October 1993; Volume 2, pp. 1122–1129. [Google Scholar] [CrossRef]
- Rashidi, N. Improved and less load dependent three-phase current-controlled inverter with hysteretic current controllers. IEEE Trans. Ind. Electron. 1995, 42, 325–330. [Google Scholar] [CrossRef]
- Tripathi, A.; Sen, P. Comparative analysis of fixed and sinusoidal band hysteresis current controllers for voltage source inverters. IEEE Trans. Ind. Electron. 1992, 39, 63–73. [Google Scholar] [CrossRef]
- Wu, F.; Feng, F.; Luo, L.; Duan, J.; Sun, L. Sampling period online adjusting-based hysteresis current control without band with constant switching frequency. IEEE Trans. Ind. Electron. 2015, 62, 270–277. [Google Scholar] [CrossRef]
- Wu, F.; Zhang, L.; Wu, Q. Simple unipolar maximum switching frequency limited hysteresis current control for grid-connected inverter. IET Power Electron. 2014, 7, 933–945. [Google Scholar] [CrossRef]
- Ho, C.N.; Cheung, V.S.; Chung, H.S. Constant-frequency hysteresis current control of grid-connected VSI without bandwidth control. In Proceedings of the 2009 IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2949–2956. [Google Scholar] [CrossRef]
- Rata, G.; Marschalko, R. Development of Hysteresis Modulation Methods for PWM AC-to-DC Converters Based on Dead-Beat Control. In Proceedings of the 2006 IEEE International Conference on Automation, Quality and Testing, Robotics, Cluj-Napoca, Romania, 25–28 May 2006; Volume 1, pp. 220–224. [Google Scholar] [CrossRef]
- Stefanutti, W.; Mattavelli, P. Fully digital hysteresis modulation with switching-time prediction. IEEE Trans. Ind. Appl. 2006, 42, 763–769. [Google Scholar] [CrossRef]
- Komurcugil, H.; Ozdemir, S.; Sefa, I.; Altin, N.; Kukrer, O. Sliding-Mode Control for Single-Phase Grid-Connected LCL-Filtered VSI With Double-Band Hysteresis Scheme. IEEE Trans. Ind. Electron. 2016, 63, 864–873. [Google Scholar] [CrossRef]
- Abrishamifar, A.; Ahmad, A.; Mohamadian, M. Fixed Switching Frequency Sliding Mode Control for Single-Phase Unipolar Inverters. IEEE Trans. Power Electron. 2012, 27, 2507–2514. [Google Scholar] [CrossRef]
- Kumar, N.; Saha, T.K.; Dey, J. Sliding-Mode Control of PWM Dual Inverter-Based Grid-Connected PV System: Modeling and Performance Analysis. IEEE J. Emerg. Sel. Top. Power Electron. 2016, 4, 435–444. [Google Scholar] [CrossRef]
- Makhamreh, H.; Trabelsi, M.; Kükrer, O.; Abu-Rub, H. An effective sliding mode control design for a grid-connected PUC7 multilevel inverter. IEEE Trans. Ind. Electron. 2019, 67, 3717–3725. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Olm, J.M. A Simple Switching-Frequency-Regulated Sliding-Mode Controller for a VSI with a Full Digital Implementation. IEEE J. Emerg. Sel. Top. Power Electron. 2020, 9, 569–579. [Google Scholar] [CrossRef]
- Lyu, J.; Hu, W.; Wu, F.; Yao, K.; Wu, J. Variable modulation offset SPWM control to balance the neutral-point voltage for three-level inverters. IEEE Trans. Power Electron. 2015, 30, 7181–7192. [Google Scholar] [CrossRef]
- Odeh, C.; Kondratenko, D.; Lewicki, A.; Jąderko, A. Modified SPWM Technique with Zero-Sequence Voltage Injection for a Five-Phase, Three-Level NPC Inverter. Energies 2021, 14, 1198. [Google Scholar] [CrossRef]
- Giri, S.K.; Chakrabarti, S.; Banerjee, S.; Chakraborty, C. A carrier-based PWM scheme for neutral point voltage balancing in three-level inverter extending to full power factor range. IEEE Trans. Ind. Electron. 2016, 64, 1873–1883. [Google Scholar] [CrossRef]
- Zeng, D.; Zheng, Y.; Luo, W.; Hu, Y.; Cui, Q.; Li, Q.; Peng, C. Research on improved auto-tuning of a pid controller based on phase angle margin. Energies 2019, 12, 1704. [Google Scholar] [CrossRef] [Green Version]
- Marati, N.; Prasad, D. A modified feedback scheme suitable for repetitive control of inverter with nonlinear load. IEEE Trans. Power Electron. 2017, 33, 2588–2600. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Conditions | ||
|---|---|---|
| TRANSITION FROM OFF STATE TO ON STATE | : ON STATE | |
| : OFF STATE | ||
| : OFF STATE | TRANSITION FROM ON STATE TO OFF STATE | |
| : ON STATE |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chacko, G.; Syamala, L.; James, N.; Jos, B.M.; Kallarackal, M. Switching Frequency Limited Hysteresis Based Voltage Mode Control of Single-Phase Voltage Source Inverters. Energies 2023, 16, 783. https://doi.org/10.3390/en16020783
Chacko G, Syamala L, James N, Jos BM, Kallarackal M. Switching Frequency Limited Hysteresis Based Voltage Mode Control of Single-Phase Voltage Source Inverters. Energies. 2023; 16(2):783. https://doi.org/10.3390/en16020783
Chicago/Turabian StyleChacko, Geethu, Lakshmi Syamala, Nithin James, Bos Mathew Jos, and Mathew Kallarackal. 2023. "Switching Frequency Limited Hysteresis Based Voltage Mode Control of Single-Phase Voltage Source Inverters" Energies 16, no. 2: 783. https://doi.org/10.3390/en16020783