1. Introduction
Li-ion batteries first entered the commercial market as portable batteries for consumer electronics. Today, the use of battery-operated rechargeable systems is envisioned to be the most promising alternative for hazardous emissions due to the use of fossil fuels [
1]. Moreover, passenger electric vehicles will continue to see the dominant use of Li-ion batteries [
2]. In recent times, it has become customary to constantly monitor and manage a battery using a battery management system (BMS) [
3] to ensures the safe, efficient, and reliable operation of the battery. BMSs are usually made of the following three components: a battery fuel gauge (BFG), an optimal charging algorithm (OCA), and cell balancing circuitry (CBC). The BFG is the most important element of a BMS, and it estimates several important states and parameters of the battery, including the state of charge (SOC). The CBC ensures safety by preventing cell imbalance between batteries in a battery pack. The OCA allows faster charging during usage without affecting the battery’s health. It is important to note that accurate SOC estimation by the BFG is crucial for efficient BMS operation, as both CBC and OCA depend on it. Furthermore, the effect of error in the SOC estimation can also lead to compounded problems such as the reduced lifespan of batteries, over-charging/over-discharging, inefficiency, safety, and reliability issues [
4]. Thus, research on accurate SOC estimation has intensified over the past decade, and several approaches have been studied for application in BMS.
Open-circuit voltage (OCV) is the measure of the electromotive force of the battery. The OCV of a battery is shown to possess a monotonically increasing relationship with the SOC of a battery. Thus, several approaches and models based on the OCV–SOC characterization have been studied for SOC estimation. For this, an OCV–SOC characterization is conducted in a laboratory setting using a scientific-grade battery cycler that is able to maintain precise voltage and current values across the battery terminals.
Figure 1a shows an 8-channel battery cell cycler made by Arbin; this device allows the collection of battery characterization data simultaneously from eight battery cells at the same time. Moreover, the battery needs to be kept at a fixed temperature in an environmental chamber during the OCV–SOC characterization.
Figure 1b shows an environmental chamber made by Cincinnati Subzero for battery research.
The data collection for the OCV characterization is designed in a way that the effects of the hysteresis and relaxation phenomenons of the battery can be nullified in the obtained OCV model. Depending on the OCV modeling approach, the data collection may also vary. In [
5], a slow-rate data collection approach is demonstrated on various existing OCV–SOC models for parameter estimation. In this approach, a fully charged battery is very slowly discharged (typically at a C/30 rate) using a constant current until it becomes empty. Then, it is charged back to full charge using the same amount of constant current. This entire discharge–charge process takes 60 h. Constant current ensures that the capacitances of the equivalent circuit model remain saturated; a very low magnitude of current assures that the hysteresis effect can be approximated as an equivalent resistance. By measuring the voltage and current values during this entire discharge/charge process, the OCV–SOC parameters are obtained. It is preferred that these data are free of measurement noise and bias. High-precision battery cyclers can maintain constant currents with very little variation and can measure and store voltage and current with very little measurement noise.
Different OCV–SOC models exist in the literature to adequately represent the OCV curve in the entire span of SOC (0–100%). Several reasons can be stated as to why many variations in the parametric expression for different models exist. Each model approximates the OCV curve differently for the lower (≈0–30%) and higher (≈80–100%) ranges of SOC. For example, the OCV–SOC relationship is quite approximately a straight line between 30% and 80% of the SOC. The straight-line model is the most simplistic approach to OCV–SOC characterization, needing just two parameters; however, the accuracy of the model is compromised at very low and very high SOC regions. In order to improve the accuracy of representation, higher-order empirical models utilizing special functions, such as the polynomial [
6], trigonometric [
7], logarithmic [
8,
9,
10,
11], and exponential functions [
12,
13], are used. The estimated parameters using these special functions often need to be represented up to their
nth decimal digit for the precise estimation of SOC (for example, in combined+3 model [
11],
n needs to be as high as six to preserve the modeling accuracy). This directly translates to using a large number of bits to completely represent, store, and process these parameters. However, many practical applications (see examples form Texas Instruments [
14] and Maxim Integrated [
15]) only allow low-bit processing for BFGs, requiring the traditional OCV–SOC parameters to be rounded. Rounding has been shown to significantly alter the model representation, resulting in poor SOC estimation accuracy [
16]. To be able to represent the OCV–SOC curve in low-computing environments precisely, tabular models can be used [
16]. Finally, variations in battery chemistries are also a driving factor for varied OCV–SOC representations.
Different OCV–SOC models vary in their formulation, in the methods of estimation of their parameters, and eventually in the resulting SOC estimation error. While accurate SOC estimation is crucial, selecting a model solely based on the accuracy of estimation may not be suitable in many applications. For example, in high-power restrictive medical equipment, such as an implantable cardiac pacemaker, reducing computational complexity is crucial [
17], while the accuracy of SOC estimation is also important. In the case of electric vehicles (EV), for example, drivers are found to experience range anxiety [
18]. Here, the accuracy of SOC estimation is crucial, and the computational requirement for SOC estimation is not a concern. These examples illustrate that BMS designers need to take multiple constraints before selecting an OCV–SOC model. There needs to be a systematic approach to selecting a particular OCV–SOC model from the numerous models presented in the literature for a specific application.
This paper presents a systematic approach to OCV–SOC model selection based on multiple selection criteria. First, each model is individually evaluated in terms of the different metrics considered—accuracy, numerical stability, computational complexity, and system requirements. The computed metrics for each model are then ranked in increasing order based on the definition of the metric. For example, the model with the highest accuracy is ranked first under the “accuracy” category. However, for computational complexity, the model with the lowest computational complexity is ranked first. Once the individual metrics are ranked, an overall ranking system, based on the Borda count voting system [
19], is pursued to combine all the metrics. The Borda count voting system ranks the candidate models in the order of the most preferred to the least based on all the selection criteria. The objective of this work is to give the reader a systematic procedure for selecting a model based on different criteria, depending on the application of their choice. Finally, the proposed approach is demonstrated using the OCV–SOC characterization data collected from a cylindrical battery cell.
In
Section 2, the eligibility criteria for the literature review and the summary of OCV–SOC characterization is provided.
Section 3 lists possible OCV models that have been used in the literature for OCV characterization. These models are classified under four categories: linear models, nonlinear models, hybrid models, and tabular models.
Section 4 details approaches to estimate the parameters for the four types of models presented in
Section 3. Given all the possibilities for OCV modeling, which model is suitable for a particular BMS design?
Section 5 answers this question by introducing several model selecting metrics. Finally,
Section 6 provides an example of selecting a model under multiple constraints.
4. OCV–SOC Model Parameter Estimation
In this section, the detailed approach to estimating the OCV–SOC parameters, from data collection to parameter estimation, is presented. The data collection needs to be performed using professional, high-precision battery cyclers that have very low measurement noise.
Figure 1a shows an Arbin battery cycler that can be programmed to execute the above data collection procedure. It is also important to keep the temperature fixed, because the change in temperature translates to changes in internal resistance. A professional environmental chamber, similar to the one shown in
Figure 1b, needs to be used to keep the temperature fixed during the experiment.
The data for OCV characterization needs to be collected in a specific way such that the parameter estimation will not be affected by the elements of the equivalent circuit model in a battery.
The following procedure needs to be followed for the data collection of OCV–SOC characterization:
Fully charge the battery at room temperature. In order to fully charge the battery, the constant-current (CC) constant-voltage (CV) approach can be used. The CV charging is terminated when the charging current i falls below .
Bring the battery to a fixed temperature in which the OCV characterization is to be performed.
Slow-discharge the battery with a discharging current of rate until the terminal voltage reaches . Let us denote the total discharge time as
Slow-charge the battery with a charging current of rate until the terminal voltage reaches Let us denote the total discharge time as
Here, the term is used to indicate the magnitude of the current. For example, let us say the manufacturer rated capacity of the battery is Then, the current at rate is
The voltage and current data in the discharge and charge process is logged at a reasonable sampling rate. Considering that the discharge rate is very low, a sampling time of seconds is sufficient for OCV modeling. When N is set to i.e., when the discharging and charging currents are set to the number of samples collected during discharging is It must be noted that the actual number of may vary depending on the available capacity of the battery, regardless of the labeled capacity.
Using the notations discussed so far, let us denote the voltage and current data collected during the discharging step (step 3) as
and
, respectively. Similarly, let us denote the voltage and current data collected during the charging step (step 4) as
and
, respectively. Using the notations introduced so far, the discharging and charging time can be written as
The charge/discharge capacities of the battery are defined as
where
Qc and
Qd denote the charge and discharge capacities, respectively.
The data for the demonstration was generated using the Samsung-30T INR21700 battery, shown in
Figure 2. The features of the battery are summarized in
Table 3.
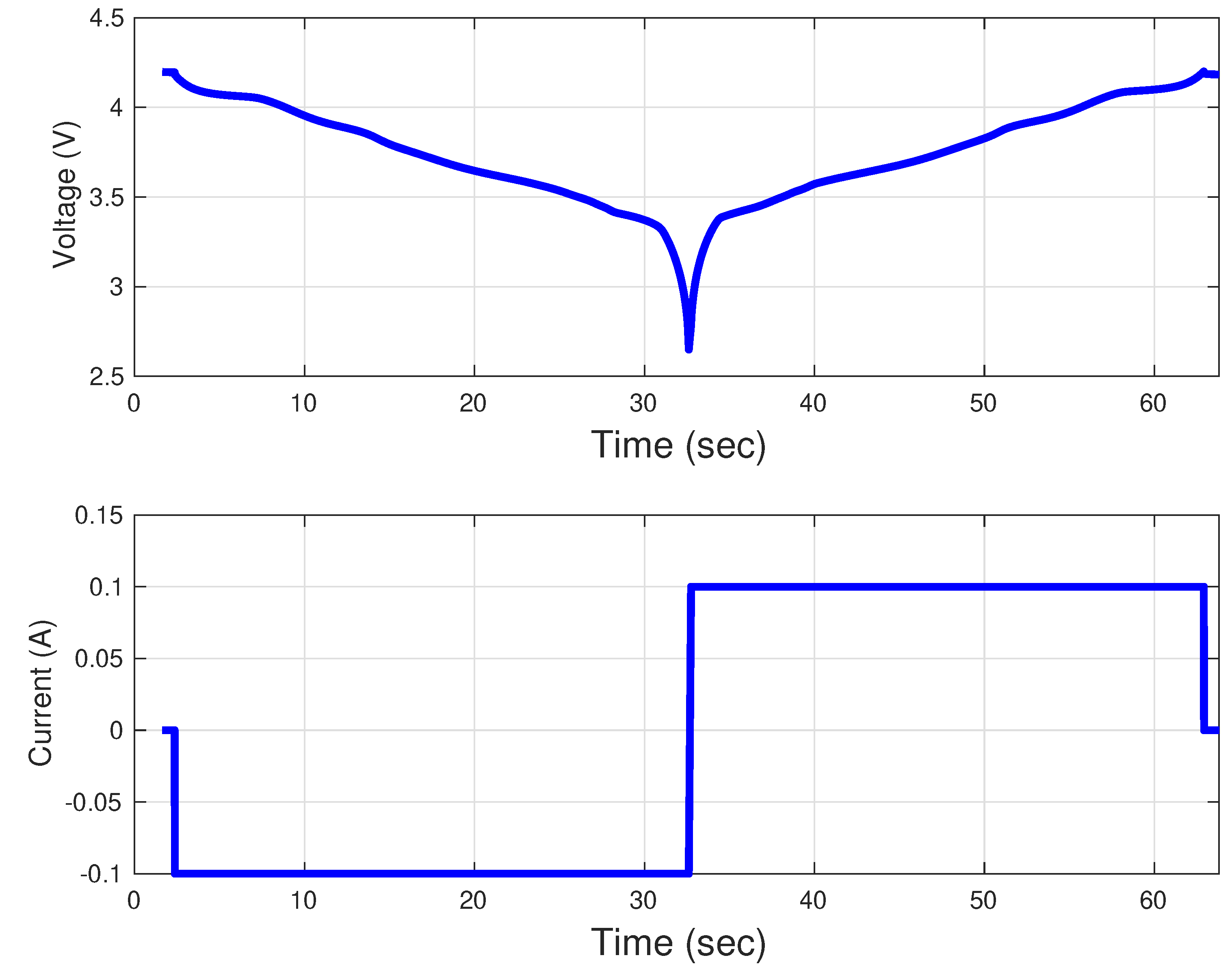
Figure 3 shows the voltage
and current
measurements during the discharging and charging steps of the data collection [
43]. The remainder of this section details how these data are used to estimate the OCV parameters of a battery.
First, let us define the SOC at a given time as
where the notation ≜, that reads “defined as”, is used to assign a new variable name with a slightly different context, e.g., the value
s at time
k is defined as
in (
21). The true SOC at time
k can be recursively computed using the Coulomb counting equation:
where
is the time difference between two measurements in seconds,
is the current (in Amperes) through the battery, and
is the battery capacity in Ampere hour (Ah).
Remark 1. It is important to note that although Coulomb counting is the easiest approach to calculate SOC at any given instant, it suffers from (i) initial SOC error, (ii) current measurement errors, (iii) current integration error, (iv) timing oscillator error, and (v) uncertainty in battery capacity [44]. So far,
and
denoted the voltage across the battery terminals and current through the battery, respectively, during the experiment. Even in high-precision systems, the measured quantities will incur some measurement noise. Let us denote the measured voltage and current using the following
where
and
denote the true voltage across the battery terminals and current through the battery,
denotes the voltage measurement noise that is assumed to be zero-mean white with standard deviation (s.d.)
, and
denotes the current measurement noise that is assumed to be zero-mean white with s.d.
.
During the OCV experiment, i.e., when the battery is being slowly charged or discharged, the terminal voltage can be written as
where
is the hysteresis voltage. By substituting
in (
26), it can be rewritten in terms of the measured current as follows
where the noise term
can be shown to be zero-mean with
as the s.d.
Since the OCV test is performed at a very low current, it can be assumed that the hysteresis is proportional to the current only, i.e.,
Hence, (
27) can be rewritten as
where the
effective resistance
is the summation of the internal resistance
and the hysteresis equivalent resistance
The goal is to estimate the parameters that define the OCV
in (
29). Depending on how the OCV is defined in
Section 3, the parameter estimation approach needs to be different. For linear models summarized in
Section 3.1, the linear least squares method is explained in
Section 4.1. For nonlinear models summarized in
Section 3.2, the linear least squares method is explained in
Section 4.2. Parameter estimation of the hybrid linear models of
Section 3.3 is summarized in
Section 4.3, and
Section 4.4 summarizes approaches to create OCV–SOC tables.
4.1. Linear Least Squares
The linear OCV–SOC model parameter estimation approach is described in this section using one of the linear models, the combined+3 model (
6), presented in
Section 3.1. A similar approach can be followed to estimate all other linear models.
Using vector notations, the observation model in (
29) can be written as,
where
and
By considering a batch of
N voltage observations, (
31) can be written as
where
The least squares estimate of the parameter vector is given by
Now, for a given SOC, the corresponding OCV estimate
is computed as
where
is formed by the first 8 elements of
. Given the voltage and current data,
and
, respectively, corresponding to the plot in
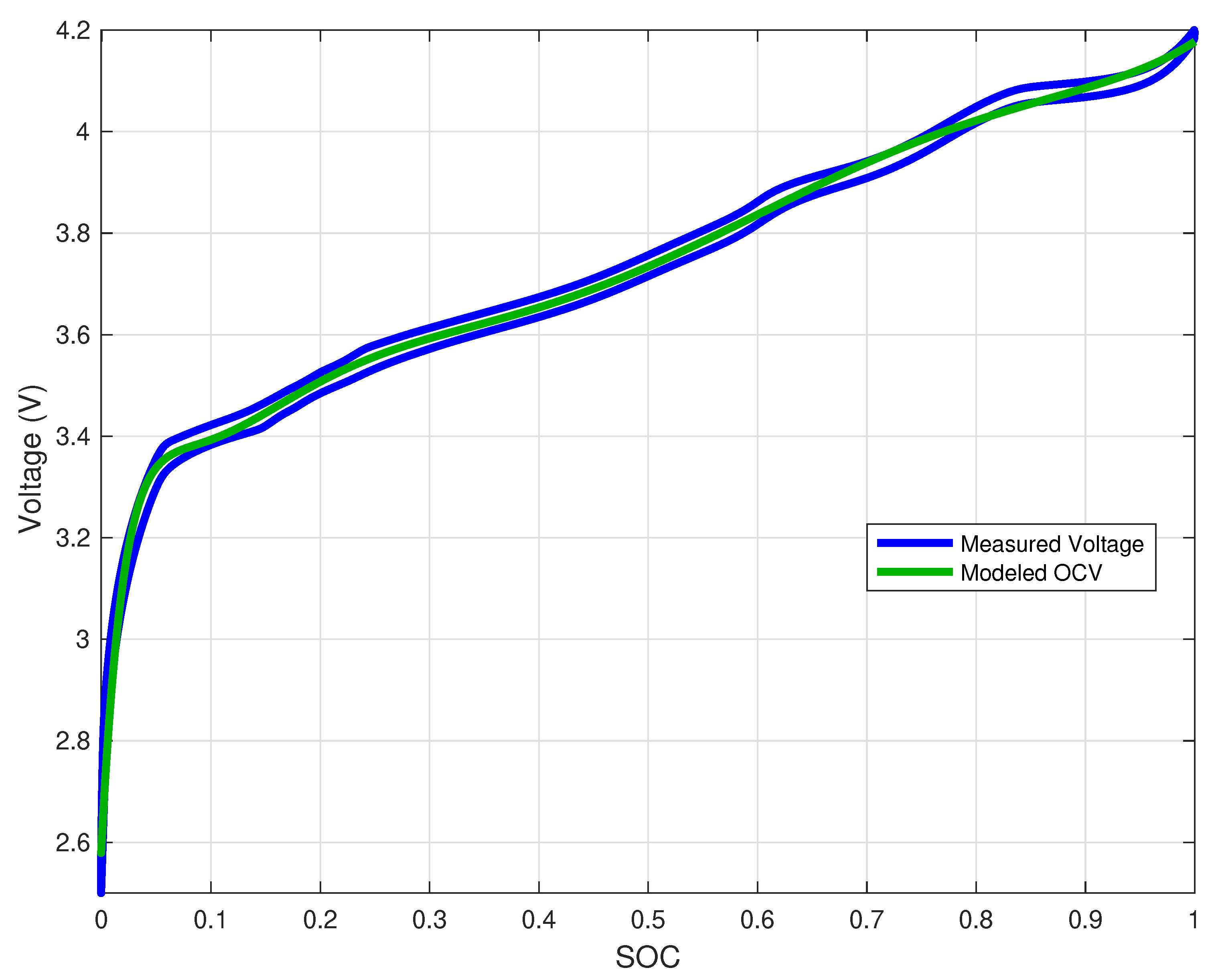
Figure 3, the following Matlab codes will generate the parameter vector
t corresponding to the combined+3 model and generate
Figure 4.
The estimated OCV parameters are
and the estimated effective resistance is
4.2. Nonlinear Least Squares
For nonlinear models, we rewrite (
34) in the following form
where
and
w is the noise vector.
The coefficients of the nonlinear regression-based models were computed using the Matlab optimization toolbox function for nonlinear least squares
lsqnonlin. The nonlinear least squares problem solves the following problem
4.3. Hybrid Estimation
Hybrid model parameters are estimated using constrained least squares estimation techniques. The following constraints are used:
The derivative is always positive. This constraint ensures that the OCV is a monotonically increasing function in terms of SOC.
Both piecewise functions and their first and second derivatives are the same at the transition point This constraint ensures that the transition between one piecewise linear function to another is seamless and without any sudden changes in characteristics.
Let us rewrite the linear observation model (
34) as
The observation model (
47) can be combined as follows
The model parameters of a hybrid, bi-linear OCV–SOC function are obtained through the following optimization:
subject to
where
denotes the second norm.
The constrained least squares solution ‘lsqlin’ in the optimization toolbox of Matlab can be used to solve the above optimization for a given value of
. The optimization can be repeated for a range of
values to find a better value for
that minimizes the cost function (
49).
4.4. Tabular Model Estimation
In order to understand the need to have a better approach than uniform sampling, let us first define the approximation error. Consider a function
that is defined in
. The goal is to represent this function at
n discrete points, i.e.,
such that the sampling error is minimized. Let us define the sampling error as the following
where
The objective is to find a nonuniform sampling of the function such that the sum of the squared sampling errors in (
52) is minimized. That is, for a given
n
where
.
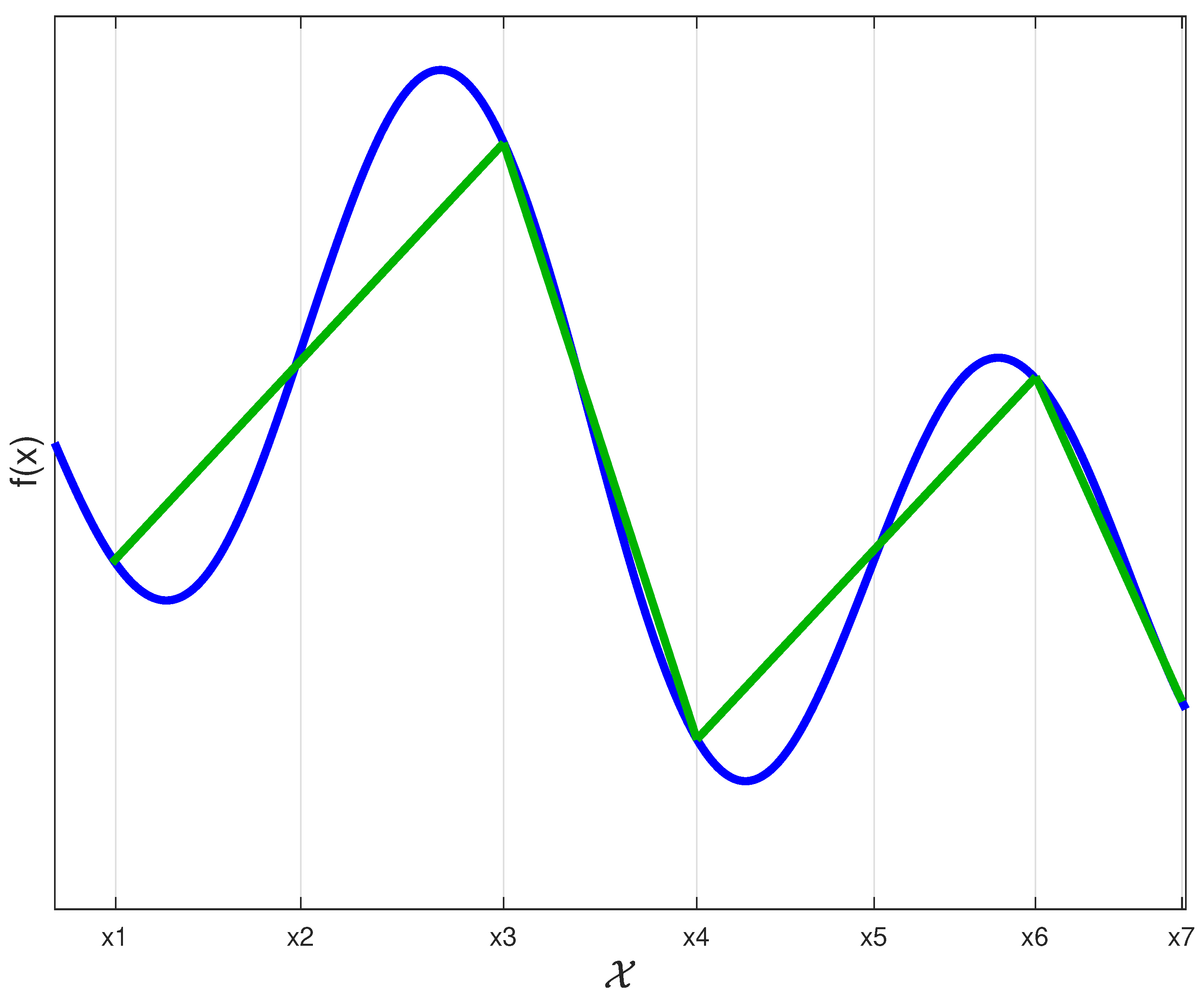
Figure 5 shows an example of a sampling error when
, i.e., uniform sampling. It can be seen that the approximation error increases with the curvature (second derivative) of the function.
The curvature of the function
is formally defined as
Let us assume, without loss of generality, that the sign of curvature changes at
points and denote these
k values as
. That is,
satisfies
These k values of are denoted as the ‘inflection points’ or ‘critical points’ from now on. The nature of the curve significantly changes at critical points. When the function changes from convex to concave, the sign of the curvature changes from positive to negative and vice versa; hence, one support point is assigned to each of the k critical points. Moreover, one support point is assigned, each at the start and end of the interval , i.e., out of the n available support points, points—, and the k values of —are preassigned. These points are denoted as the ‘preassigned points’ from now on. This leaves us with points to be assigned to segments created by the k inflection points. The selection of these samples consists of the following two steps:
- (a)
Find the number of support points to be allocated to each of the sections created by the k inflection points.
- (b)
Place the support points in each section.
The following notations are used to describe these approaches:
where
denotes the floor operation and
denotes the modulus operation. Here, one can see that
The absolute area of the curvature in each of the
sections is defined as
where
,
and
are defined according to (
56).
Remark 2. and are not the critical points.
Next, an approach is described to fulfill steps (a) and (b).
(a) Number of support points:
If
, the
m support points are assigned to section
j such that
Else/If
and
m is even,
support points are assigned to each of section
and section
such that
Else/If
and
m is odd,
support points are assigned to section
such that
support points are assigned to section
such that
(b) Placement of support points: Once the number of points in each section is allocated, the points in each section are then placed equidistantly within that section. Let us assume that section
j, which is bounded by
and
, was assigned
L support points. The location of these
L support points can be written as
where
where the distance in each section is determined by the difference between the preassigned points of that section divided by the total number of points plus one of that section.
7. Conclusions
This paper presents an objective review of models used for OCV–SOC characterization in rechargeable batteries. Available OCV–SOC models are categorized into linear, nonlinear, hybrid, and tabular ones. Model parameter estimation strategies are discussed for each case. A comparative analysis of battery OCV–SOC models is presented in terms of various performance indicators. All models were ranked based on selection metrics, such as OCV prediction accuracy, model evaluation metrics, computational complexity, numerical stability, and system requirement. The proposed systematic approach for OCV–SOC model selection is demonstrated using data collected form a commercially available cylindrical Li-ion battery cell.
A BMS designer can use the proposed approach to select a particular OCV–SOC model for implementation. For instance, in miniature electronics, where memory and computational resources are scarce, one may choose to redo
Table 9 based only on the system requirement and computational complexity metrics. The model selection approach can also be modified to give more priority for certain constraints. The proposed approach is general enough to incorporate newer OCV–SOC models and other types model selection metrics. Although the proposed approach is demonstrated using data collected from a Li-ion battery, it can also be applied for model selection in other types of rechargeable batteries.
The proposed approach in this paper is demonstrated using data collected form a particular battery. One should keep in mind that the ranking of models presented in this paper is entirely based on this data; the model order may differ for another battery. It must also be kept in mind that the accuracy of an OCV–SOC model depends on how the OCV–SOC characterization data was obtained. There will be slight cell-to-cell variations, and their effect is neither considered nor quantified in this paper. Future works must consider expanding the approach presented in this paper to incorporate an approach to consider cell-to-cell variances.


 ,
, 








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}