
Optimization of Magnetic Gear Patterns Based on Taguchi Method Combined with Genetic Algorithm

Abstract
:1. Introduction
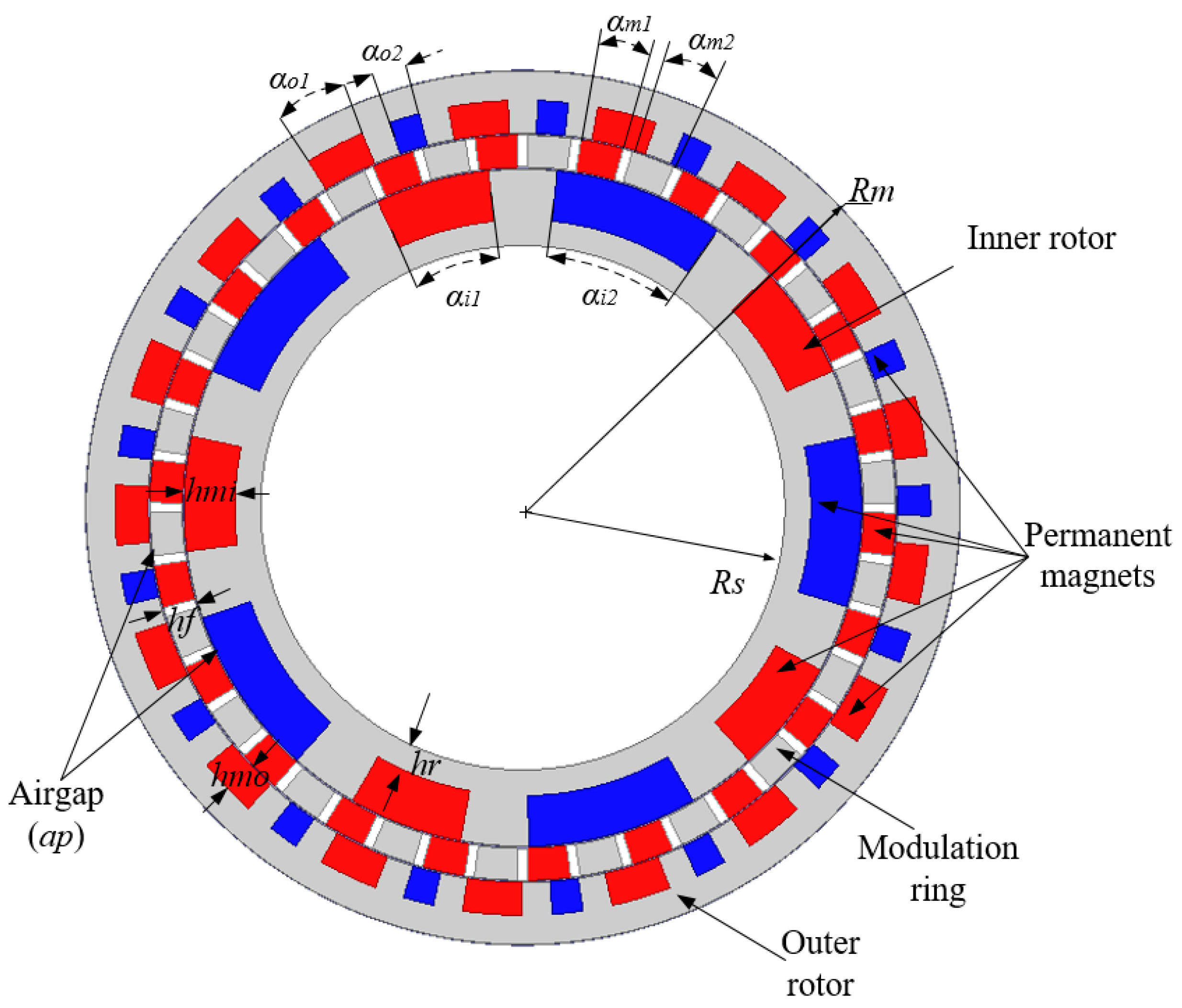
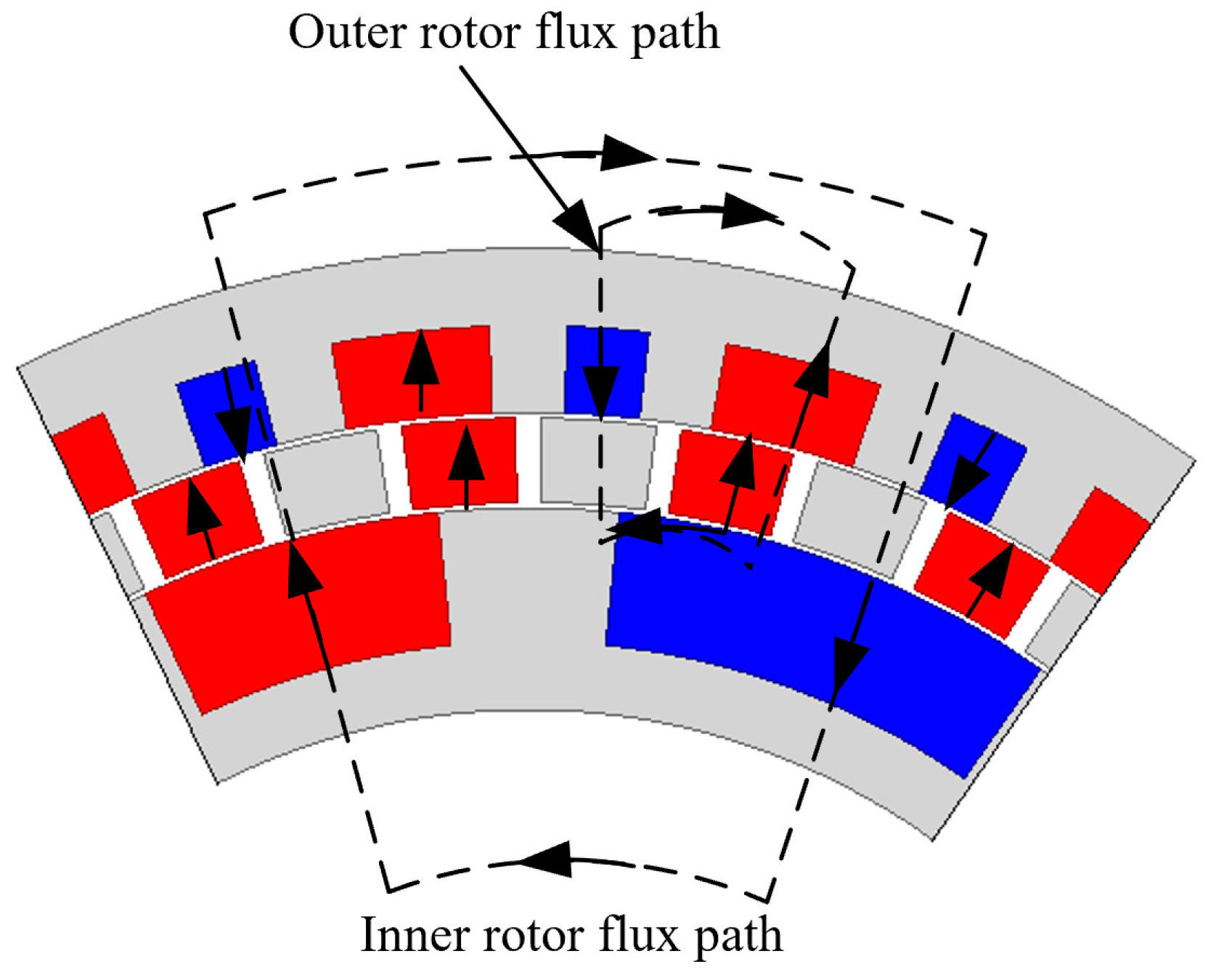
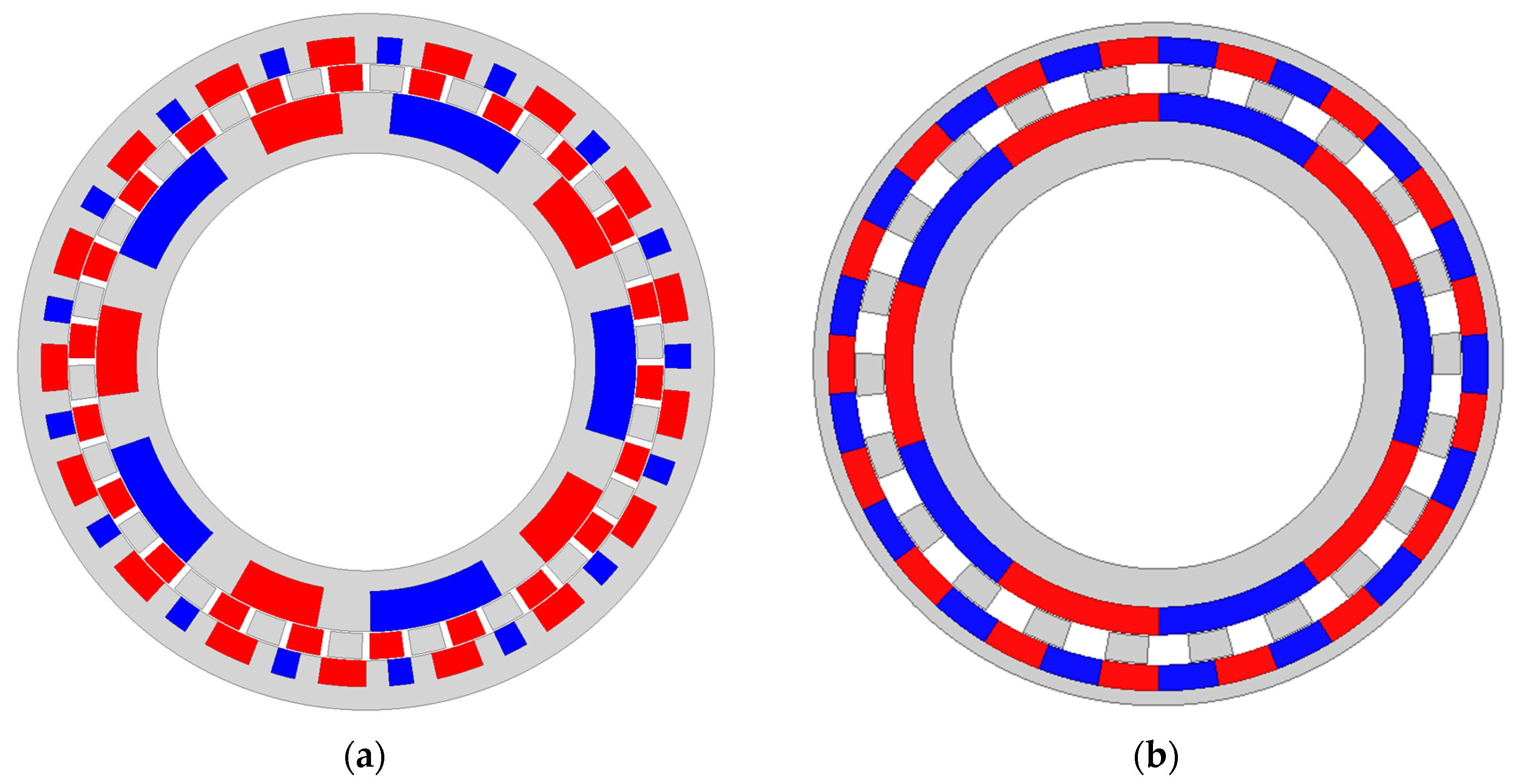
2. General Pattern Design
3. Sensitivity Analysis and Optimization
3.1. Taguchi Orthogonal Array Analysis of Objective Function
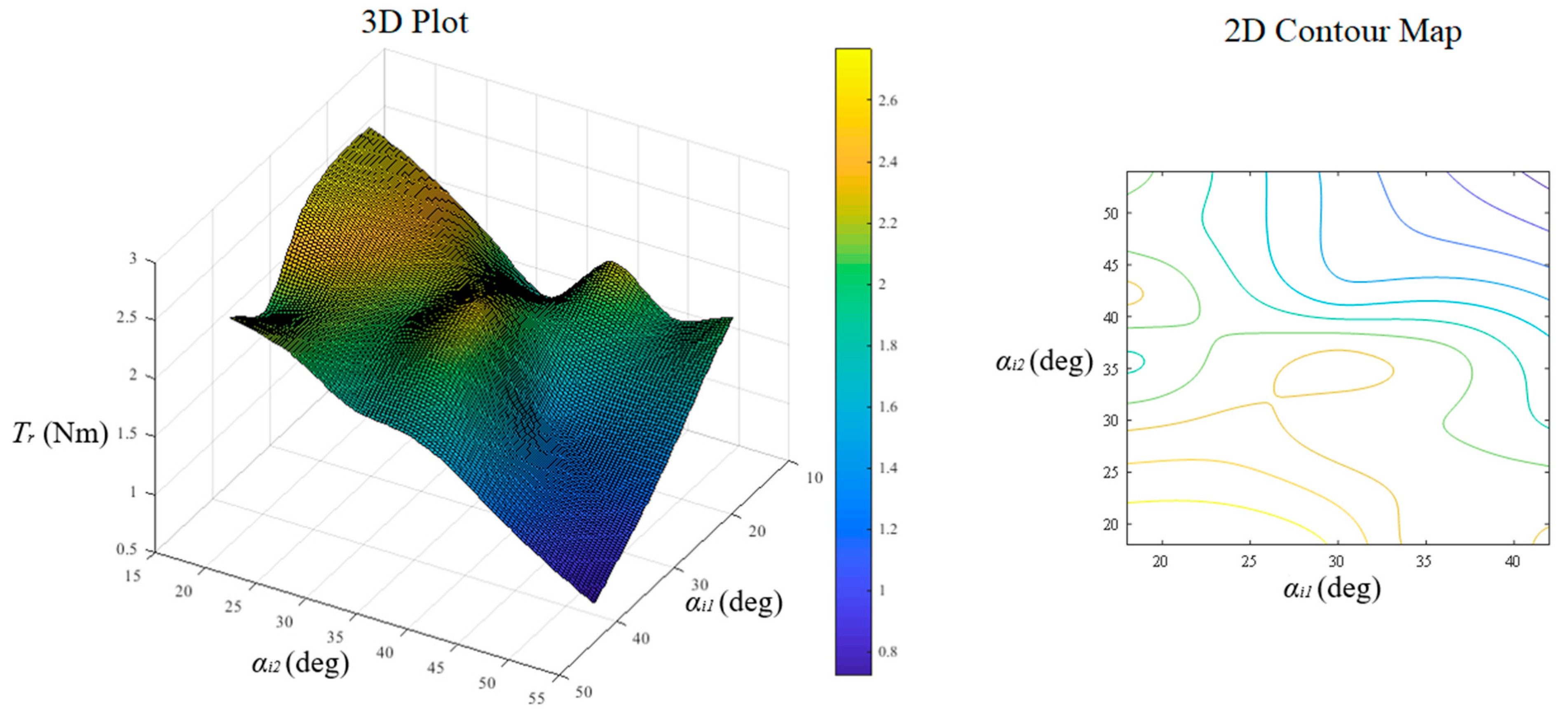
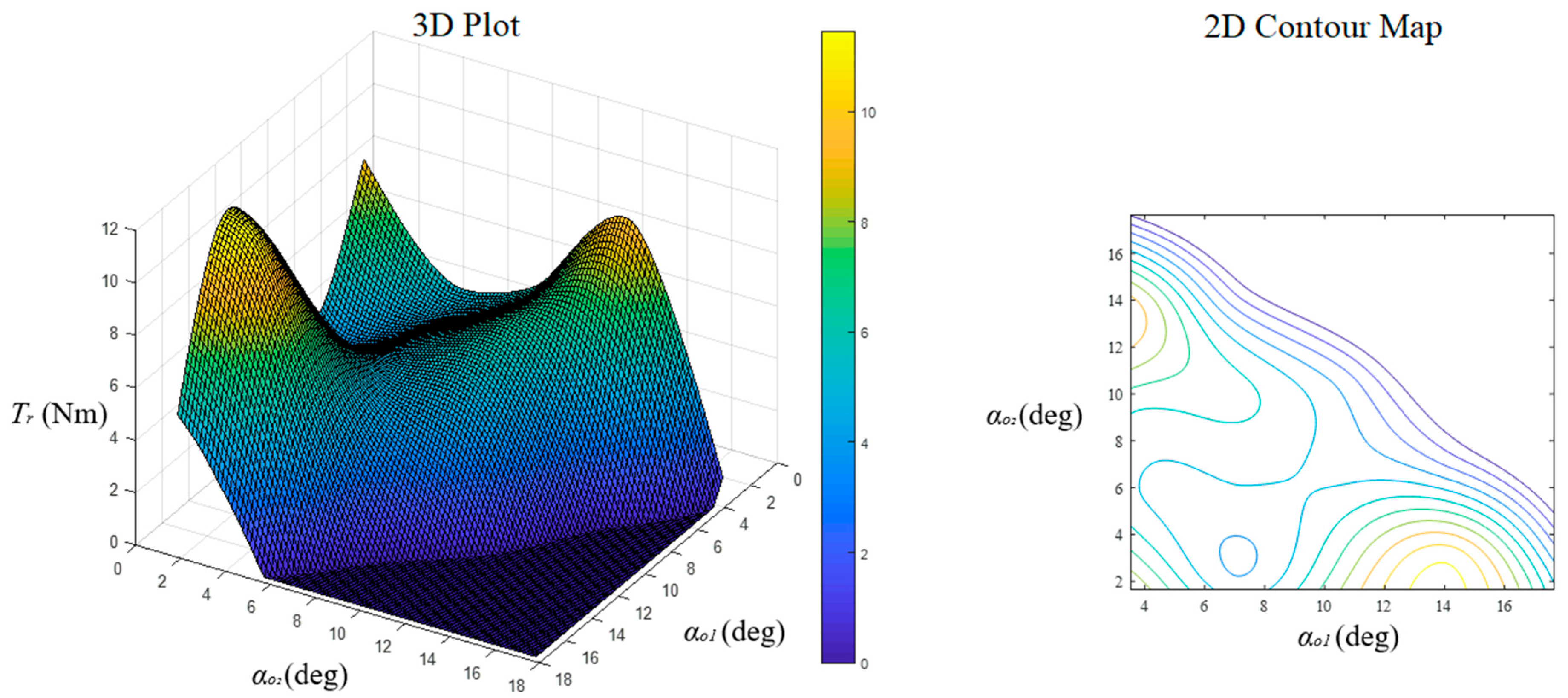
3.2. Sensitivity Analysis and Linear Interpolation Fitting of Torque Ripple Function
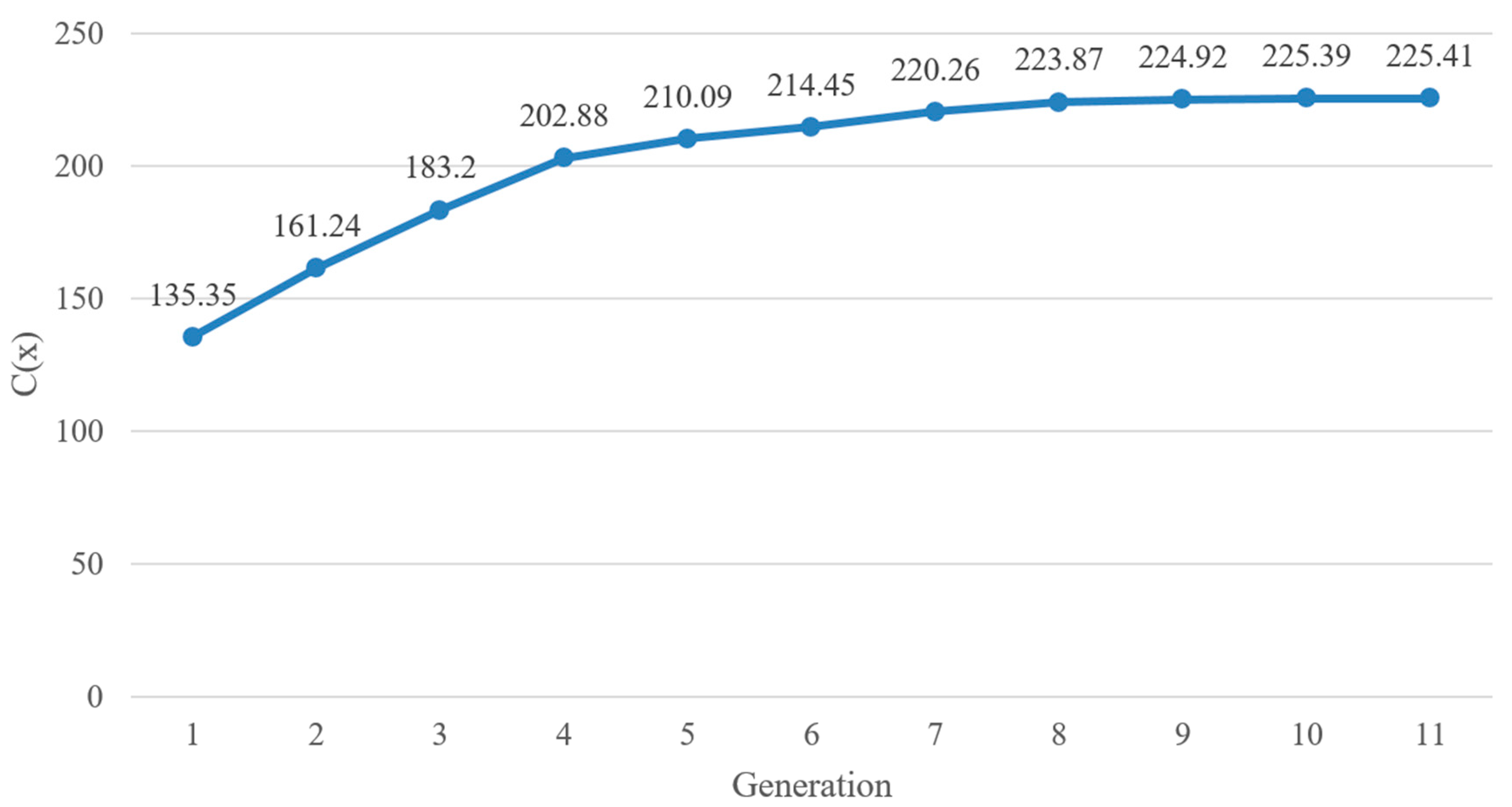
3.3. Establishing Optimization
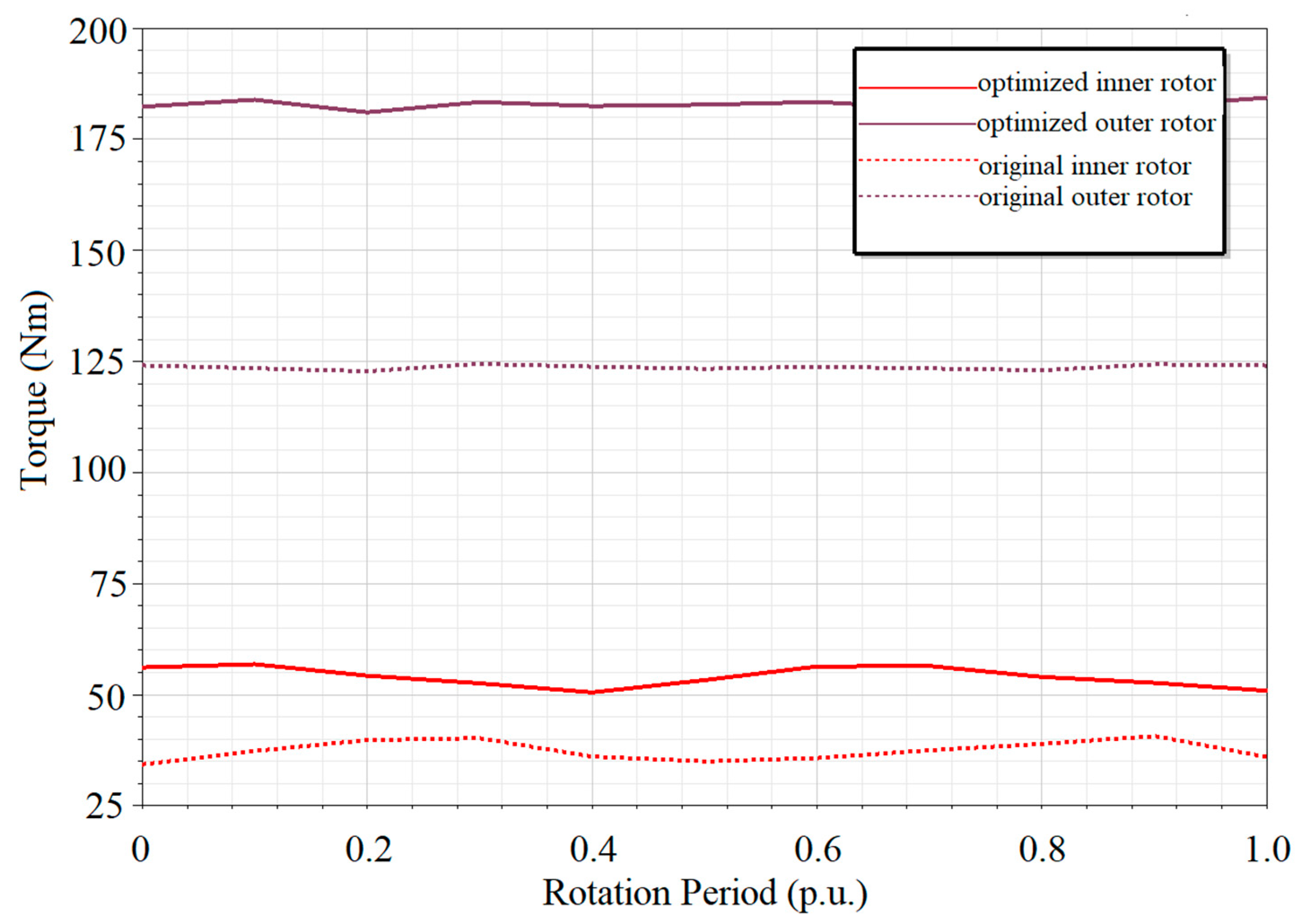
3.4. Optimization Results Discussions
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Polinder, H.; Ferreira, J.A.; Jensen, B.B.; Abrahamsen, A.B.; Atallah, K.; McMahon, R.A. Trends in wind turbine generator systems. IEEE Trans. Emerg. Sel. Top. Power Electron. 2013, 1, 174–185. [Google Scholar] [CrossRef]
- Rasmussen, P.O.; Andersen, T.O.; Jorgensen, F.T.; Nielsen, O. Development of a high-performance magnetic gear. IEEE Trans. Ind. Appl. 2005, 41, 764–770. [Google Scholar] [CrossRef]
- Peng, S.; Fu, W.N.; Ho, S.L. A novel high torque-density triple permanent-magnet-excited magnetic gear. IEEE Trans. Magn. 2014, 50, 6971416. [Google Scholar] [CrossRef]
- Atallah, K.; Calverley, S.D.; Howe, D. Design analysis and realisation of a high-performance magnetic gear. IEEE Proc. Elect. Power Appl. 2004, 151, 135–143. [Google Scholar] [CrossRef]
- Gouda, E.; Mezani, S.; Baghli, L.; Rezzoug, A. Comparative study between mechanical and magnetic planetary gears. IEEE Trans. Magn. 2011, 47, 439–450. [Google Scholar] [CrossRef]
- Niu, S.; Mao, Y. A Comparative Study of Novel Topologies of Magnetic Gears. Energies 2016, 9, 773. [Google Scholar] [CrossRef] [Green Version]
- Chen, Y.; Fu, W.N.; Ho, S.L.; Liu, H. A quantitative comparison analysis of radial-flux transverse-flux and axial-flux magnetic gears. IEEE Trans. Magn. 2014, 50, 8104604. [Google Scholar] [CrossRef]
- Ho, S.L.; Yang, S.Y.; Ni, G.Z.; Wong, H.C. A particle swarm optimization method with enhanced global search ability for design optimizations of electromagnetic devices. IEEE Trans. Magn. 2006, 42, 1107–1110. [Google Scholar] [CrossRef] [Green Version]
- Zhao, X.; Niu, S. Design and Optimization of a New Magnetic-Geared Pole-Changing Hybrid Excitation Machine. IEEE Trans. Ind. Electron. 2017, 64, 9943–9952. [Google Scholar] [CrossRef]
- Ho, S.L.; Niu, S.; Fu, W.N. A new dual-stator bidirectional-modulated PM machine and its optimization. IEEE Trans. Magn. 2014, 50, 8103404. [Google Scholar] [CrossRef]
- Niu, S.; Chen, N.; Ho, S.L.; Fu, W.N. Design optimization of magnetic gears using mesh adjustable finite-element algorithm for improved torque. IEEE Trans. Magn. 2012, 48, 4156–4159. [Google Scholar] [CrossRef]
- Preis, K.; Magele, C.; Biro, O. FEM and evolution strategies in the optimal-design of electromagnetic devices. IEEE Trans. Magn. 1990, 26, 2181–2183. [Google Scholar] [CrossRef]
- Dang, D.C.; Friedrich, T.; Kötzing, T.; Krejca, M.S.; Lehre, P.K.; Oliveto, P.S.; Sudholt, D.; Sutton, A.M. Escaping Local Optima Using Crossover With Emergent Diversity. IEEE Trans. Evol. Comput. 2018, 22, 484–497. [Google Scholar] [CrossRef] [Green Version]
- Hasanien, H.M. Design optimization of PID controller in automatic voltage regulator system using Taguchi combined genetic algorithm method. IEEE Syst. J. 2013, 7, 825–831. [Google Scholar] [CrossRef]
- Wang, H.T.; Liu, Z.J. Application of Taguchi method to robust design of BLDC motor performance. IEEE Trans. Magn. 1999, 35, 3700–3702. [Google Scholar] [CrossRef]
- Hwang, C.C.; Chang, C.M.; Liu, C.T. A Fuzzy-Based Taguchi Method for Multiobjective Design of PM Motors. IEEE Trans. Magn. 2013, 49, 2153–2156. [Google Scholar] [CrossRef]
- Zaman, M.A.; Matin, M.A. Optimization of Jiles-Atherton Hysteresis Model Parameters Using Taguchi’s Method. IEEE Trans. Magn. 2014, 51, 7301004. [Google Scholar] [CrossRef]
- Weng, W.C.; Yang, F.; Elsherbeli, A.Z. Linear Antenna Array Synthesis Using Taguchi’s Method: A Novel Optimization Technique in Electromagnetics. IEEE Trans. Antennas Propag. 2007, 55, 723–730. [Google Scholar] [CrossRef]
- Zaman, M.A. Photonic radiative cooler optimization using Taguchi’s method. Int. J. Therm. Sci. 2019, 144, 21–26. [Google Scholar] [CrossRef]
- Chou, P.Y.; Tsai, J.T.; Chou, J.H. Modeling and Optimizing Tensile Strength and Yield Point on a Steel Bar Using an Artificial Neural Network with Taguchi Particle Swarm Optimizer. IEEE Access 2016, 4, 585–593. [Google Scholar] [CrossRef]
- Tsai, J.T.; Liu, T.K.; Chou, J.H. Hybrid Taguchi-genetic algorithm for global numerical optimization. IEEE Trans. EComput. 2004, 8, 365–377. [Google Scholar] [CrossRef]
- Warren, C.; Giannopoulos, A. Creating finite-difference time-domain models of commercial ground-penetrating radar antennas using Taguchi’s optimization method. Geophysics 2011, 76, G37–G47. [Google Scholar] [CrossRef]
- Mao, Y.; Niu, S.X. Sensitivity Analysis Based Optimization of General Magnetic Gear Patterns. In Proceedings of the Compumag 2019, Paris, France, 15–19 July 2019. [Google Scholar]
- Atallah, K.; Howe, D. A novel high-performance magnetic gear. IEEE Trans. Magn. 2001, 37, 2844–2846. [Google Scholar] [CrossRef] [Green Version]
- Mao, Y.; Niu, S.; Yang, Y. Differential evolution based multi-objective optimization of the electrical continuously variable transmission system. IEEE Trans. Ind. Electron. 2018, 65, 2080–2089. [Google Scholar] [CrossRef]
- Ashabani, M.; Abdel-Rady, Y.; Mohamed, I.; Milimonfared, J. Optimum design of tubular permanent-magnet motors for thrust characteristics improvement by combined Taguchi-neural network approach. IEEE Trans. Magn. 2010, 46, 4092–4100. [Google Scholar] [CrossRef]
- Mao, Y.; Niu, S. Topology Exploration and Analysis of a Novel Winding Factor Modulation Based Hybrid-Excited Biased-Flux Machine. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 1788–1799. [Google Scholar] [CrossRef]
- Jiang, P.; Liu, F.; Wang, J.; Song, Y. Cuckoo search-designated fractal interpolation functions with winner combination for estimating missing values in time series. Appl. Math. Model. 2016, 40, 9692–9718. [Google Scholar] [CrossRef]
- Yang, Y.; Tan, S.; Hui, S.Y. Front-end parameter monitoring method based on two-layer adaptive differential evolution for SS-compensated wireless power transfer systems. IEEE Trans. Ind. Inform. 2019, 15, 6101–6113. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Meaning | Value |
|---|---|---|
| pi | inner rotor pole pair number | 5 |
| po | outer rotor pole pair number | 17 |
| m | modulation ferrite segments | 22 |
| ag | airgap length | 0.5 mm |
| lg | axial length | 65 mm |
| hmi | inner layer height | variable |
| hf | middle layer height | variable |
| hmo | outer layer height | variable |
| hr | inner rotor height | variable |
| Rs | innermost radius | 60 mm |
| Rm | outermost radius | 105 mm |
| αi1 | angle of inner layer S pole | variable |
| αi2 | angle of inner layer N pole | variable |
| αm1 | angle of middle layer S pole | variable |
| αm2 | angle of middle layer ferrite pole | variable |
| αo1 | angle of outer layer S pole | variable |
| αo2 | angle of outer layer N pole | variable |
| μr | relative permibility | 1.044 |
| Hc | magnetic coercivity | −8.38 × 105 A/m |
| X1 (hmi) | X2 (hf) | X3 (hmo) | X4 (hr) | X5 (αi1) | |
| Level 1 | 4 mm | 4 mm | 4 mm | 4 mm | 18° |
| Level 2 | 8 mm | 8 mm | 8 mm | 8 mm | 24° |
| Level 3 | 12 mm | 12 mm | 12 mm | 12 mm | 36° |
| X1 (hmi) | X2 (hf) | X3 (hmo) | X4 (hr) | X5 (αi1) | |
| Level 1 | 18° | 60°/17 | 60°/17 | 60°/22 | 60°/22 |
| Level 2 | 24° | 120°/17 | 120°/17 | 120°/22 | 120°/22 |
| Level 3 | 36° | 180°/17 | 180°/17 | 180°/22 | 180°/22 |
| No. | X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | C(X) |
|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | L1 | L1 | L1 | L1 | L1 | L1 | L1 | L1 | L1 | L1 | 47.39 |
| 2 | L1 | L1 | L1 | L1 | L2 | L2 | L2 | L2 | L2 | L2 | 69.29 |
| 3 | L1 | L1 | L1 | L1 | L3 | L3 | L3 | L3 | L3 | L3 | 112.18 |
| 4 | L1 | L2 | L2 | L2 | L1 | L1 | L1 | L2 | L2 | L2 | 37.28 |
| 5 | L1 | L2 | L2 | L2 | L2 | L2 | L2 | L3 | L3 | L3 | 60.19 |
| 6 | L1 | L2 | L2 | L2 | L3 | L3 | L3 | L1 | L1 | L1 | 80.14 |
| 7 | L1 | L3 | L3 | L3 | L1 | L1 | L1 | L3 | L3 | L3 | 29.13 |
| 8 | L1 | L3 | L3 | L3 | L2 | L2 | L2 | L1 | L1 | L1 | 45.86 |
| 9 | L1 | L3 | L3 | L3 | L3 | L3 | L3 | L2 | L2 | L2 | 83.24 |
| 10 | L2 | L1 | L2 | L3 | L1 | L2 | L3 | L1 | L2 | L3 | 112.43 |
| 11 | L2 | L1 | L2 | L3 | L2 | L3 | L1 | L2 | L3 | L1 | 13.08 |
| 12 | L2 | L1 | L2 | L3 | L3 | L1 | L2 | L3 | L1 | L2 | 71.91 |
| 13 | L2 | L2 | L3 | L1 | L1 | L2 | L3 | L2 | L3 | L1 | 39.62 |
| 14 | L2 | L2 | L3 | L1 | L2 | L3 | L1 | L3 | L1 | L2 | 56.42 |
| 15 | L2 | L2 | L3 | L1 | L3 | L1 | L2 | L1 | L2 | L3 | 61.95 |
| 16 | L2 | L3 | L1 | L2 | L1 | L2 | L3 | L3 | L1 | L2 | 108.48 |
| 17 | L2 | L3 | L1 | L2 | L2 | L3 | L1 | L1 | L2 | L3 | 27.85 |
| 18 | L2 | L3 | L1 | L2 | L3 | L1 | L2 | L2 | L3 | L1 | 44.07 |
| 19 | L3 | L1 | L3 | L2 | L1 | L3 | L2 | L1 | L3 | L2 | 51.76 |
| 20 | L3 | L1 | L3 | L2 | L2 | L1 | L3 | L2 | L1 | L3 | 53.78 |
| 21 | L3 | L1 | L3 | L2 | L3 | L2 | L1 | L3 | L2 | L1 | 23.84 |
| 22 | L3 | L2 | L1 | L3 | L1 | L3 | L2 | L2 | L1 | L3 | 82.40 |
| 23 | L3 | L2 | L1 | L3 | L2 | L1 | L3 | L3 | L2 | L1 | 68.20 |
| 24 | L3 | L2 | L1 | L3 | L3 | L2 | L1 | L1 | L3 | L2 | 35.61 |
| 25 | L3 | L3 | L2 | L1 | L1 | L3 | L2 | L3 | L2 | L1 | 32.28 |
| 26 | L3 | L3 | L2 | L1 | L2 | L1 | L3 | L1 | L3 | L2 | 83.49 |
| 27 | L3 | L3 | L2 | L1 | L3 | L2 | L1 | L2 | L1 | L3 | 35.15 |
| X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| L1 | 62.74 | 61.74 | 66.16 | 59.75 | 60.08 | 50.90 | 33.97 | 60.71 | 64.61 | 43.83 |
| L2 | 59.53 | 57.97 | 58.43 | 51.62 | 53.12 | 58.93 | 57.74 | 50.87 | 57.37 | 66.38 |
| L3 | 51.83 | 54.39 | 49.51 | 60.20 | 60.89 | 51.94 | 82.39 | 62.51 | 52.12 | 63.89 |
| Parameter | Original Value Range | Improved Value Range |
|---|---|---|
| X1(hmi) | [4 mm, 20 mm] | [4 mm, 8 mm] |
| X2(hf) | [4 mm, 20 mm] | [4 mm, 8 mm] |
| X3(hmo) | [4 mm, 20 mm] | [4 mm, 8 mm] |
| X4(hr) | [4 mm, 20 mm] | [8 mm, 16 mm] |
| X5(αi1) | [0°, 36°] | [30°, 42°] |
| X6(αi2) | [0°, 36°] | [24°, 36°] |
| X7(αo1) | [0°, 18°] | [120°/17, 240°/17] |
| X8(αo2) | [0°, 18°] | [120°/17, 240°/17] |
| X9(αm1) | [0°, 18°] | [0°/22, 120°/22] |
| X10(αm2) | [0°, 18°] | [60°/22, 180°/22] |
| X1 (hmi) | X2 (hf) | X3 (hmo) | X4 (hr) | X5 (αi1) | |
| Level 1 | 4 mm | 4 mm | 4 mm | 8 mm | 30° |
| Level 2 | 6 mm | 6 mm | 6 mm | 12 mm | 36° |
| Level 3 | 8 mm | 8 mm | 8 mm | 16 mm | 42° |
| X6 (αi2) | X7 (αo1) | X8 (αo2) | X9 (αm1) | X10 (αm2) | |
| Level 1 | 24° | 120°/17 | 120°/17 | 0°/22 | 60°/22 |
| Level 2 | 30° | 180°/17 | 180°/17 | 60°/22 | 120°/22 |
| Level 3 | 36° | 240°/17 | 240°/17 | 120°/22 | 180°/22 |
| X1 | X2 | X3 | X4 | X5 | X6 | X7 | X8 | X9 | X10 | |
|---|---|---|---|---|---|---|---|---|---|---|
| SS | 0.04 | 0.11 | 0.25 | 0.03 | 1.77 | 1.87 | 1.74 | 1.68 | 0.68 | 0.81 |
| PC(%) | 0.44 | 1.22 | 2.78 | 0.33 | 19.7 | 20.8 | 19.4 | 18.7 | 7.57 | 9.02 |
| Parameter | Original Model | Optimized Model |
|---|---|---|
| X1 (hmi) | 11.54 mm | 7.9 mm |
| X2 (hf) | 7.31 mm | 8.0 mm |
| X3 (hmo) | 7.49 mm | 7.4 mm |
| X4 (hr) | 5.95 mm | 11.3 mm |
| X5 (αi1) | 19.5 deg | 35.8 deg |
| X6 (αi2) | 28.8 deg | 36.1 deg |
| X7 (αo1) | 8.5 deg | 10.4 deg |
| X8 (αo2) | 4.3 deg | 10.6 deg |
| X9 (αm1) | 6.6 deg | 0.0 deg |
| X10 (αm2) | 6.7 deg | 8.2 deg |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mao, Y.; Yang, Y. Optimization of Magnetic Gear Patterns Based on Taguchi Method Combined with Genetic Algorithm. Energies 2022, 15, 4963. https://doi.org/10.3390/en15144963
Mao Y, Yang Y. Optimization of Magnetic Gear Patterns Based on Taguchi Method Combined with Genetic Algorithm. Energies. 2022; 15(14):4963. https://doi.org/10.3390/en15144963
Chicago/Turabian StyleMao, Yuan, and Yun Yang. 2022. "Optimization of Magnetic Gear Patterns Based on Taguchi Method Combined with Genetic Algorithm" Energies 15, no. 14: 4963. https://doi.org/10.3390/en15144963