3.1. Theoretical Study and Design Formula
The method proposed for the suppression of the AHCs is based on the design of multiple, periodically reproduced, independent shapes of the tooth tips of the machine, called independent tooth tips. In [
23], a simple design formula was developed to determine the number of the independent shapes. This formula has been derived by expressing the airgap flux density as the product of the rotor MMF and a flux-path permeance function. Three separate permeance functions took into account the stator slotting effects of both the modified tooth-tip shapes and the segmented stator core. Therefore, the approach proposed in [
23] aims at reciprocally suppress the harmonics of the permeance functions associated to the tooth tips shape and to the segmented stator core with a proper design of the tooth tips. According to this strategy, the developed design formula provides the number of independent tooth tips as the ratio between the number of stator slots and stator segments.
In this paper, a novel strategy to reduce to the number of the independent tooth tips is proposed. Therefore, the number of design variables is reduced, providing a less complex optimization problem. Considering the modified shapes of the tooth tips, the cogging torque of the APMM can be expressed as:
where
describes the components of the cogging torque caused by the shape of the tooth tips, called introduced harmonic components (IHCs). The novel strategy aims at directly suppress the AHCs by means of the IHCs. For this purpose, the IHCs should have the same frequency of the AHCs. To find a relationship between the frequency of the IHCs and the number of the independent tooth tips, we conduct a theoretical study. In [
9], the superposition principle is employed to study the cogging torque of PMMs with a SSC. According to this principle, the contributions of the slotted stator structure and of the stator segmentations are independent and can be added together. In particular, the cogging torque contribution due to the slotted stator structure can be studied by considering a non-segmented slotted machine. Commonly made assumptions to study the cogging torque of these machines are as follows [
9,
19,
28,
29]:
The magnetic energy is stored only in the airgap and PMs volume;
The PMs and air permeability are equal to the vacuum permeability;
The permeability of the iron is assumed to be infinite;
The airgap flux density is constant along the radial direction.
The cogging torque of a rotating PMM can be studied with the well-known energy method, which defines the cogging torque as:
where
is the stored magnetic energy. According to the above assumptions,
can be expressed as in [
19]:
where
is the volume of airgap and PMs,
is the vacuum permeability, and
is the no-load airgap flux density expressed as:
where
is the airgap permeance function,
is the rotor MMF, and
is the angular displacement along stator circumference. Considering Equation (11), Equation (10) can be expressed as:
where
,
and
are the stack length, the outer radius of rotor, and inner radius of the stator, respectively. Following the approach adopted in [
30,
31],
can be expressed as:
with:
where
is the difference between
and
,
is the additional length of the airgap flux-path due to the presence of the stator slots and
is the additional length of the airgap flux-path due to the modified shape of the tooth tips. Assuming
, (14) can be approximated by the first-order Taylor’s expansion:
where
and
are the permeance functions associated to the stator slotting effect and to the modified shape of the tooth tips, respectively. Considering (15), (12) can be expressed as:
where
,
. Compared to the basic machine, the one with the modified shape of the tooth tips has an additional component of the squared permeance function, i.e.,
. Therefore, the IHCs are caused by the interaction between this component and the rotor MMF:
If
independent shapes of the tooth tips are periodically reproduced for all the tooth tips of the machine, the frequency
of the function
is:
This frequency coincide with the frequency of
. This can be easily verified by means of the Werner formula, considering Equation (15), the definition of
, and that the frequency of
is equal to
, i.e., an integer multiple of
. Considering the orthogonality property of trigonometric functions, in (17) only the harmonic components of
and
with the same frequency contribute to the energy, and, thus, to the cogging torque. Therefore, the frequency of
is expressed by:
Finally, the following expression for the
holds true:
where
and
are the amplitude and the phase shift of the
i-th harmonic component, respectively.
Equations (19) and (20) are a key result of the presented analytical study. These formulas state that the frequencies of the IHCs of a PMM designed with
independent tooth tips are multiple of the LCM between the number of poles and the ratio of the number of slots and the number of independent tooth tips. Considering (3) and (20), to obtain IHCs with the same frequency of the AHCs, the following equation should be satisfied:
Therefore, the minimum number of independent tooth tips to suppress the AHCs is the following:
Equation (22) is the design formula that allows the designer to choose the number of independent tooth tips. By applying (22) to the APMMs with 20, 30 and 60 stator core segments, the values of
obtained are 6, 2, and 2, respectively. Instead, by applying the design formula of [
23], the values of
obtained are 6, 3 and 2. Therefore, in this case, the developed design formula allows to reduce the number of independent tooth tips when the APMM with 30 stator core segments are considered.
3.2. Tooth Tips Shape Design through Topolgical Optimization (TO)
Equation (22) ensures that the IHCs include components with the same frequency of the AHCs. However, to suppress the AHCs, it is still necessary to properly set the amplitude and the phase shift of the IHCs through the design of the shape of the independent tooth tips. To face this issue, an effective approach proposed in [
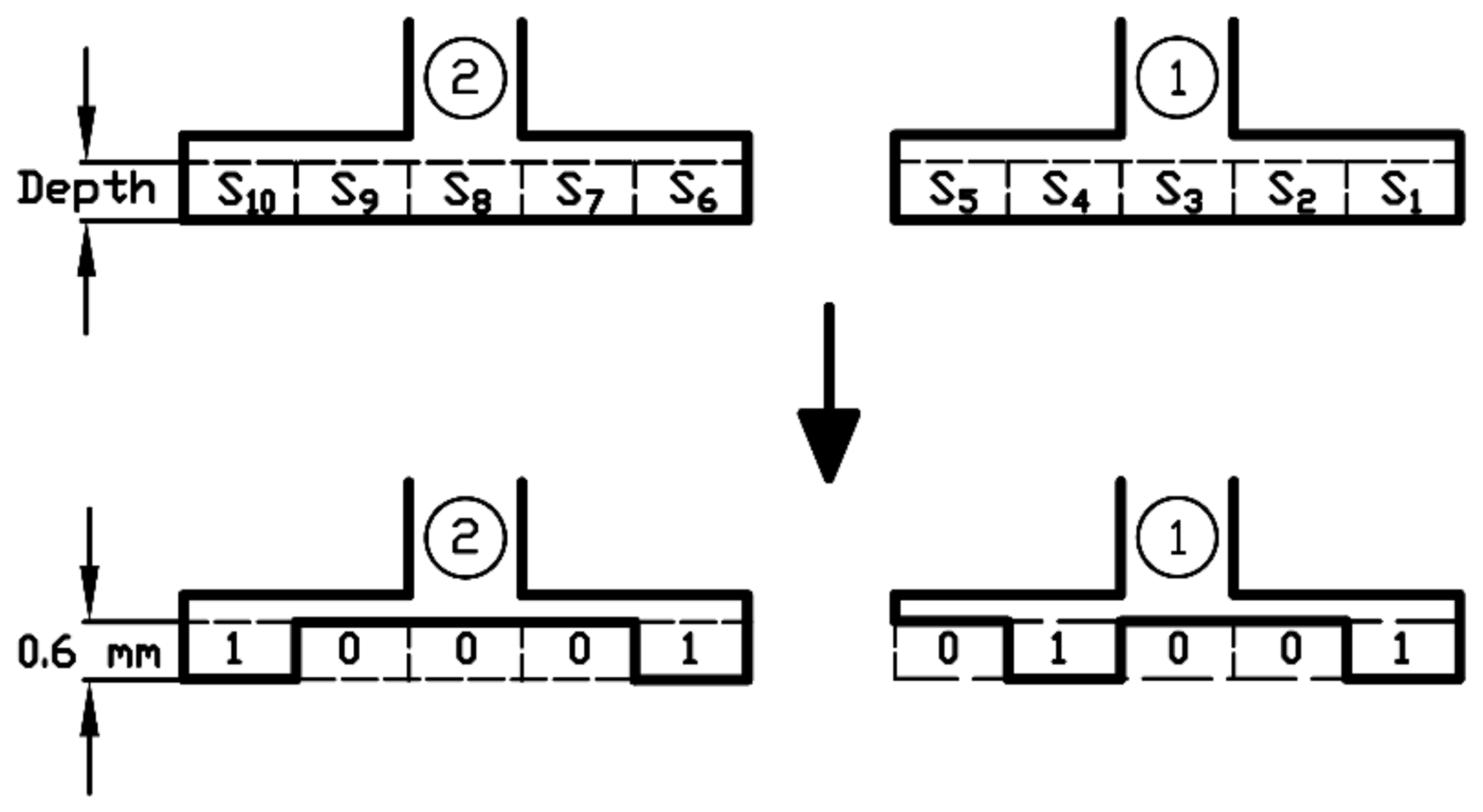
23] is based on the definition of a TO problem. Each independent tooth tip is discretized with a variable depth layer of
sub-regions, called sub-teeth. To define the sub-region materials, a binary variable (
) is assigned to each ith sub-tooth of the jth independent tooth tip.
= 0 denotes air while 1 denotes iron. Moreover, considering the depth of the sub-teeth layer as an additional variable, the design variables of the TO problem can be expressed as follows:
where
with
, and
, with
as the depth limit for the sub-teeth layers. Therefore,
binary design variables and a real bounded design variable are defined. Two independent tooth tips discretized with layers of 5 sub-teeth are shown in
Figure 4, while an APMM module designed with the above independent tooth tips is depicted in
Figure 5. As shown in the figure, the shapes of the independent tooth tips are periodically reproduced for all the tooth tips of the APMM. The objective function,
, of the TO is defined as the peak-to-peak value of the cogging torque:
where
is the cogging torque waveform of the APMM designed in agreement with the current values of the design variables
. The maximum value of
is limited by the tooth tips width and the manufacturing tolerances, while the maximum value for
is limited by the tooth tip height. The choice of
should be a trade-off between the achievable performances and the computational effort. In fact, the number of the sub-teeth is related to the quantity of the design variables affecting the complexity of the optimization problem and consequently the computational effort required by the heuristic solution. Similar considerations are done about the choice of
.


 ,
, 




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}