Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer



 ,
,  , and
, and
Abstract
:1. Introduction
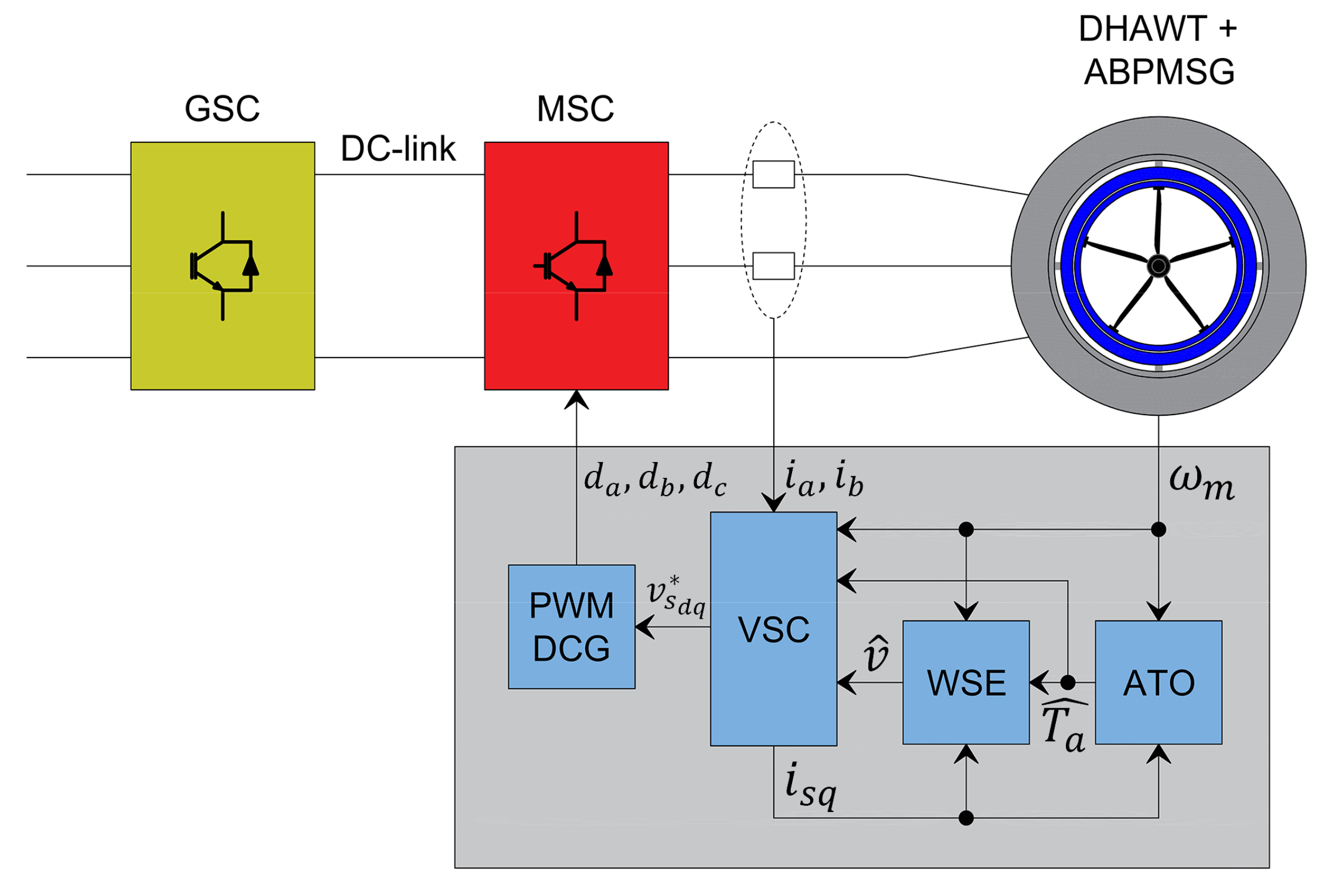
2. System Description
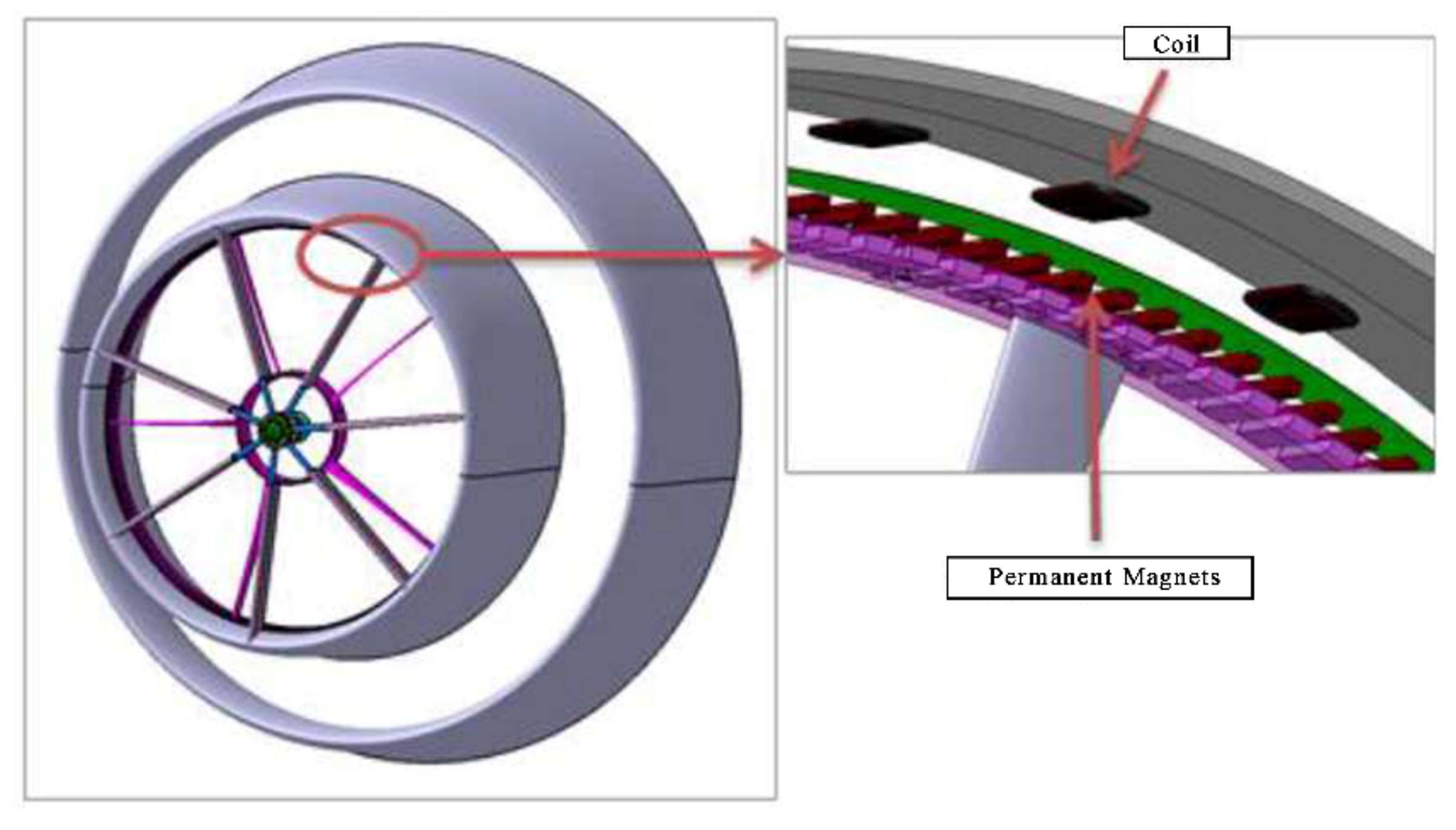
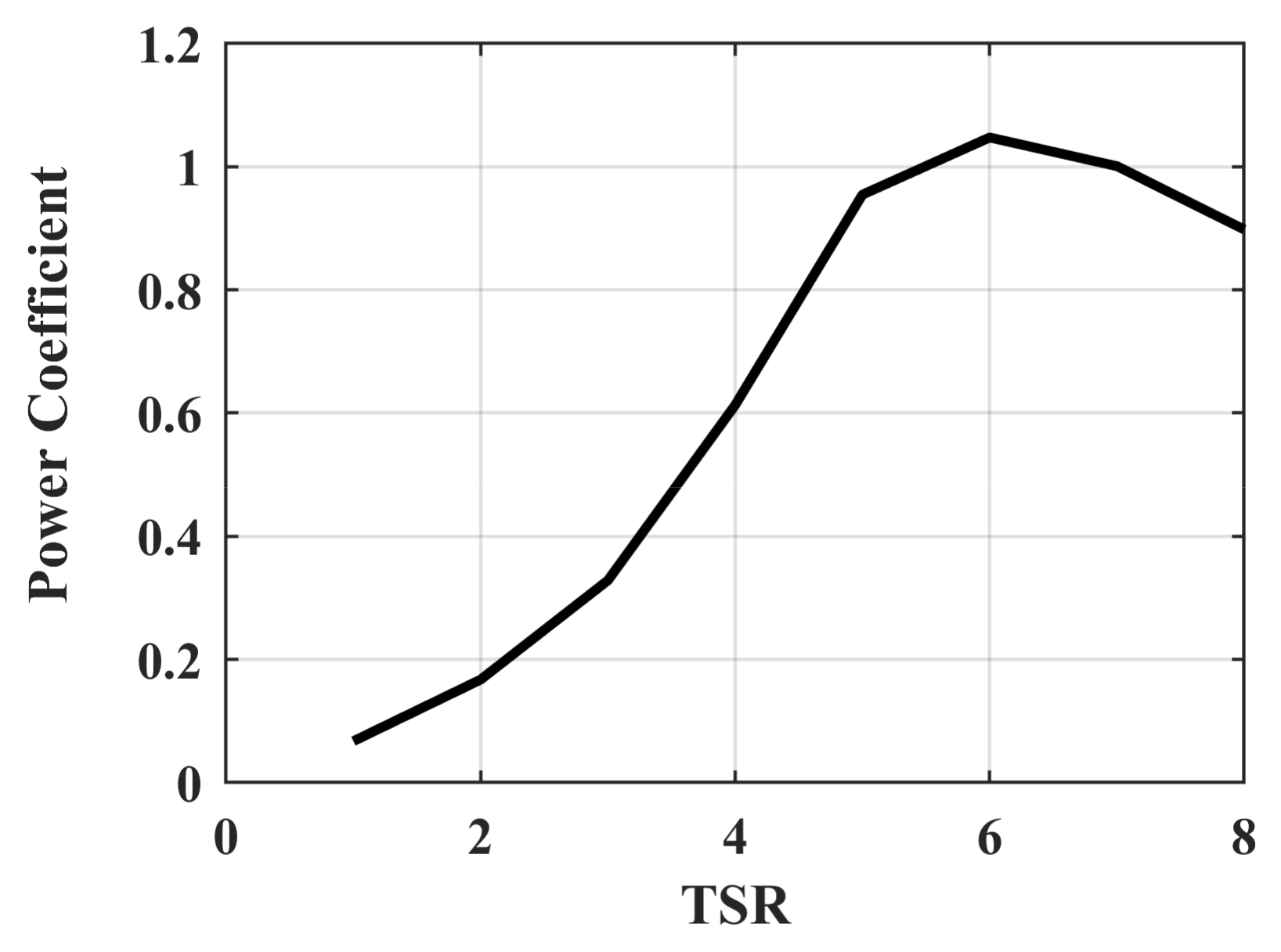
2.1. Ducted Wind Turbine
2.2. Annular Brushless PMSG
2.3. Power Conversion Stage
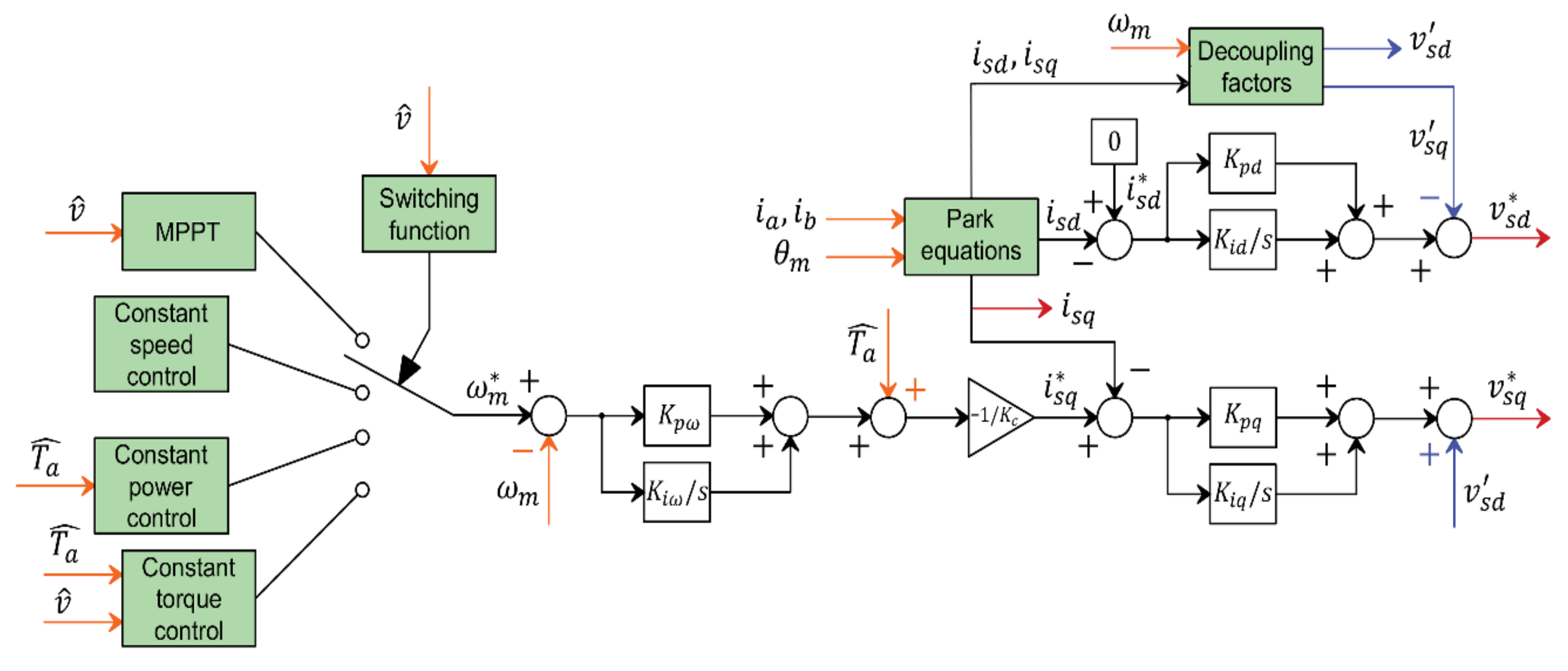
3. Control Scheme Description
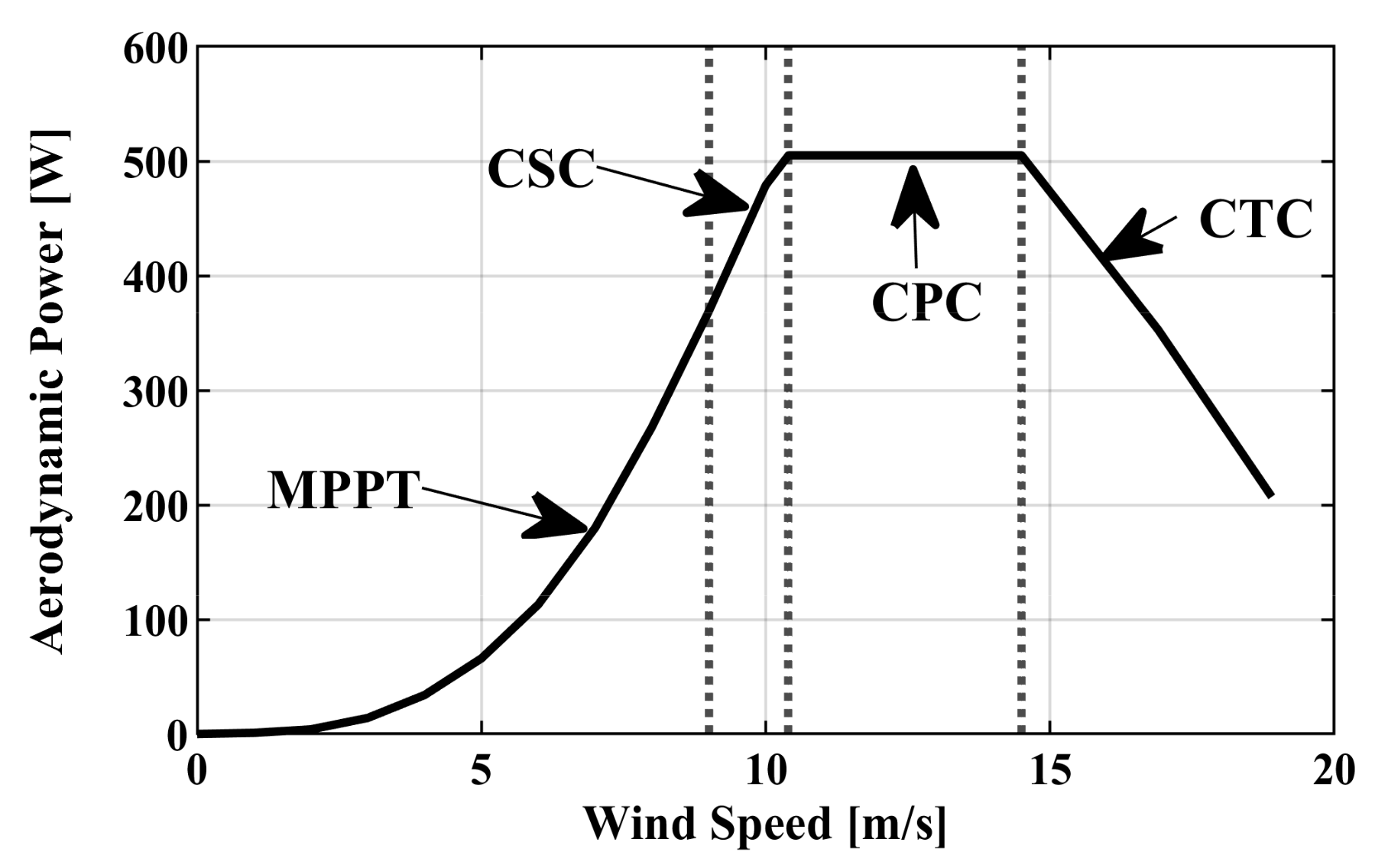
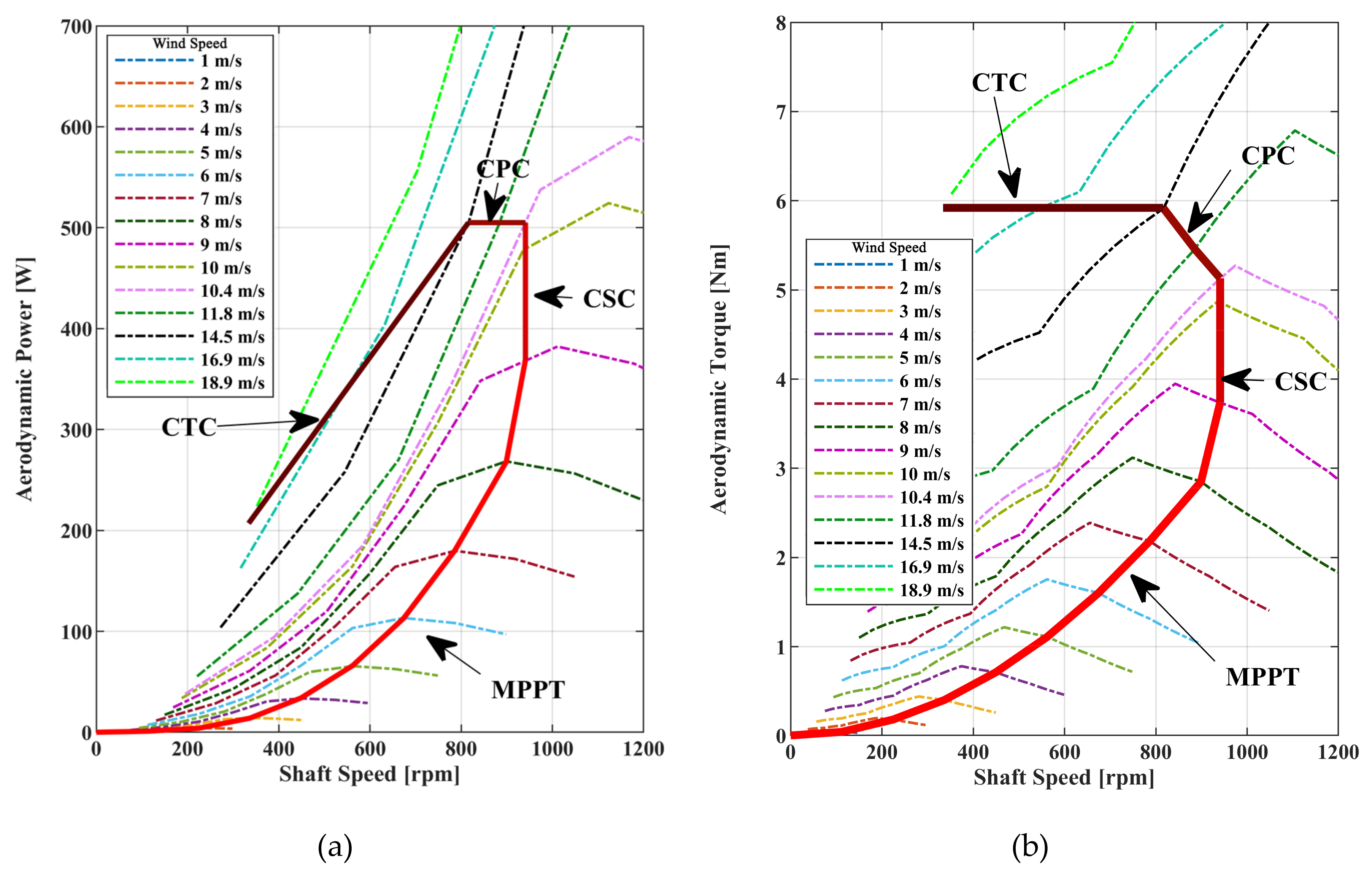
3.1. Variable Structure Controller
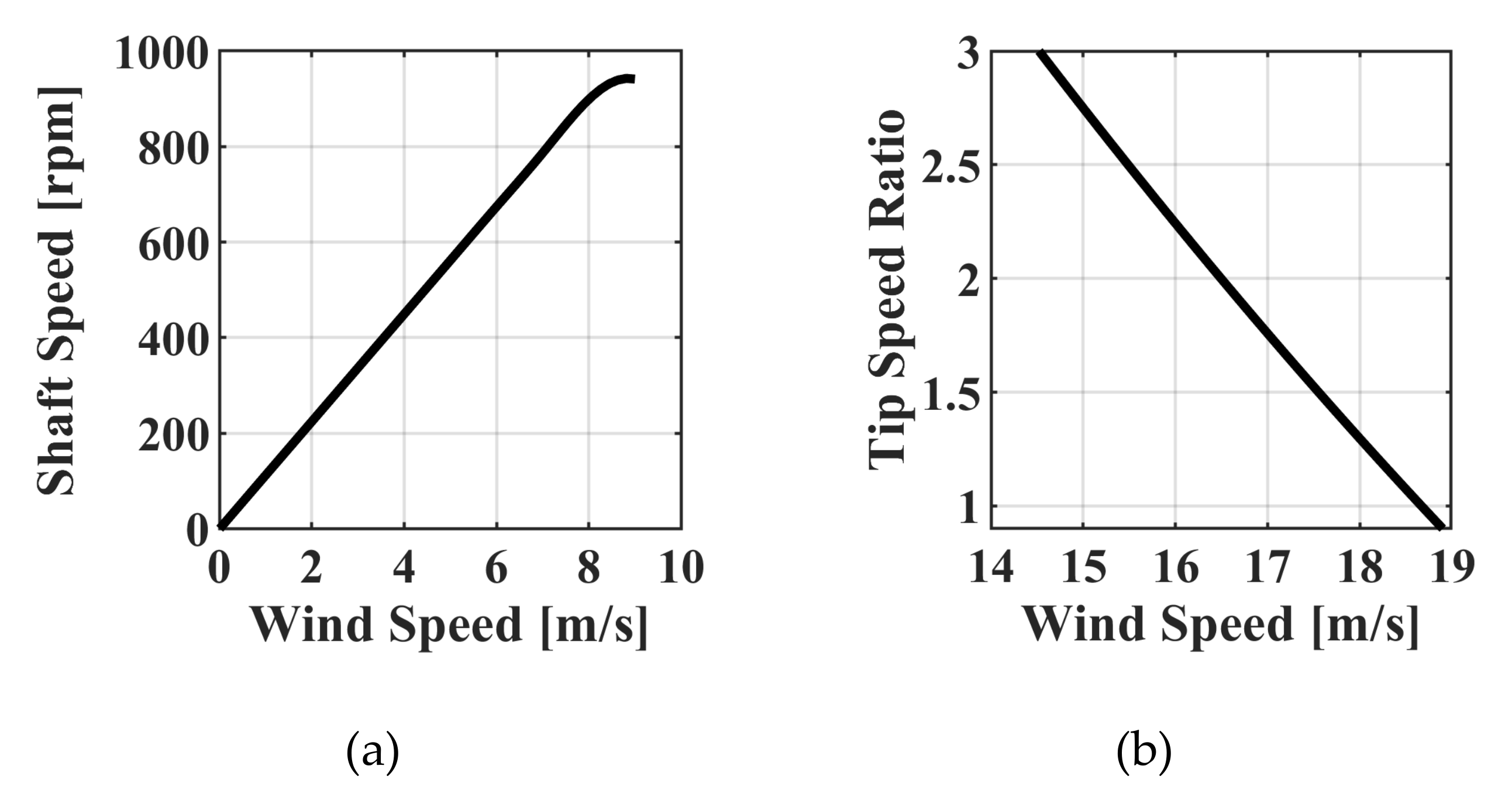
3.1.1. Maximum Power-Point Tracking
3.1.2. Operation in the High-Wind Speeds Regions
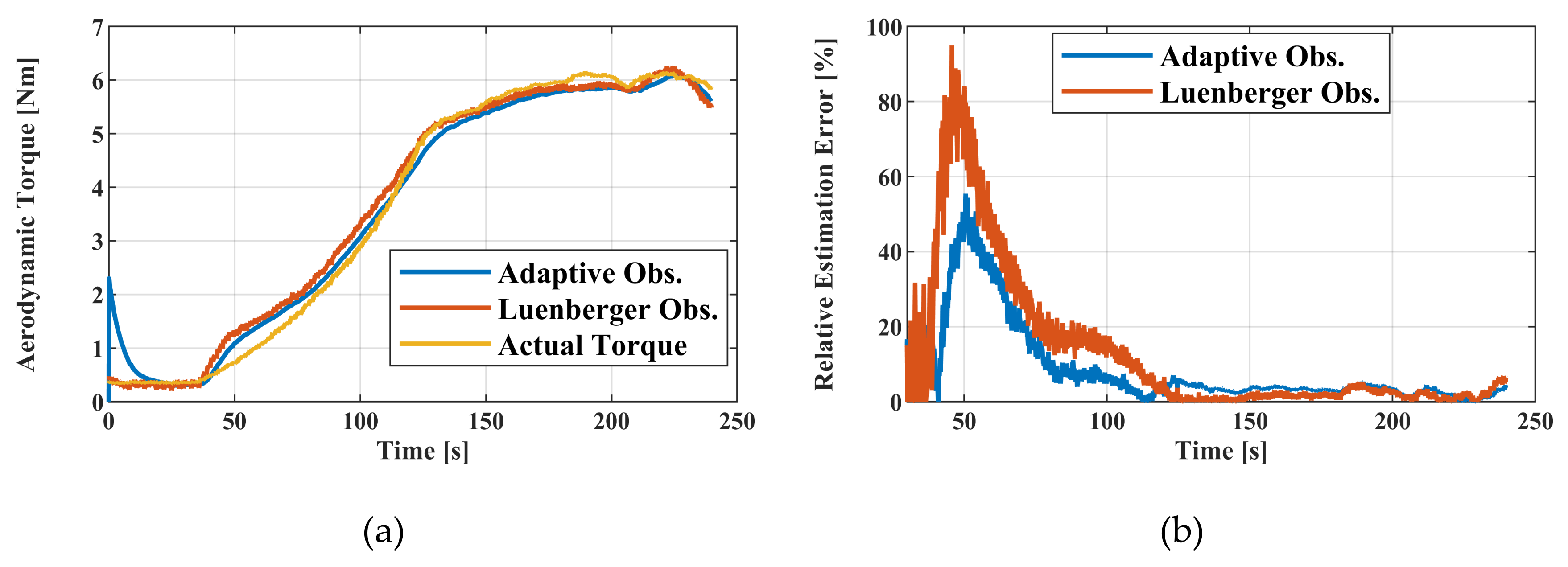
3.2. Aerodynamic Torque Observer
- The dynamic friction losses are negligible (;
- The derivative of the aerodynamic torque is zero (.
3.3. PWM
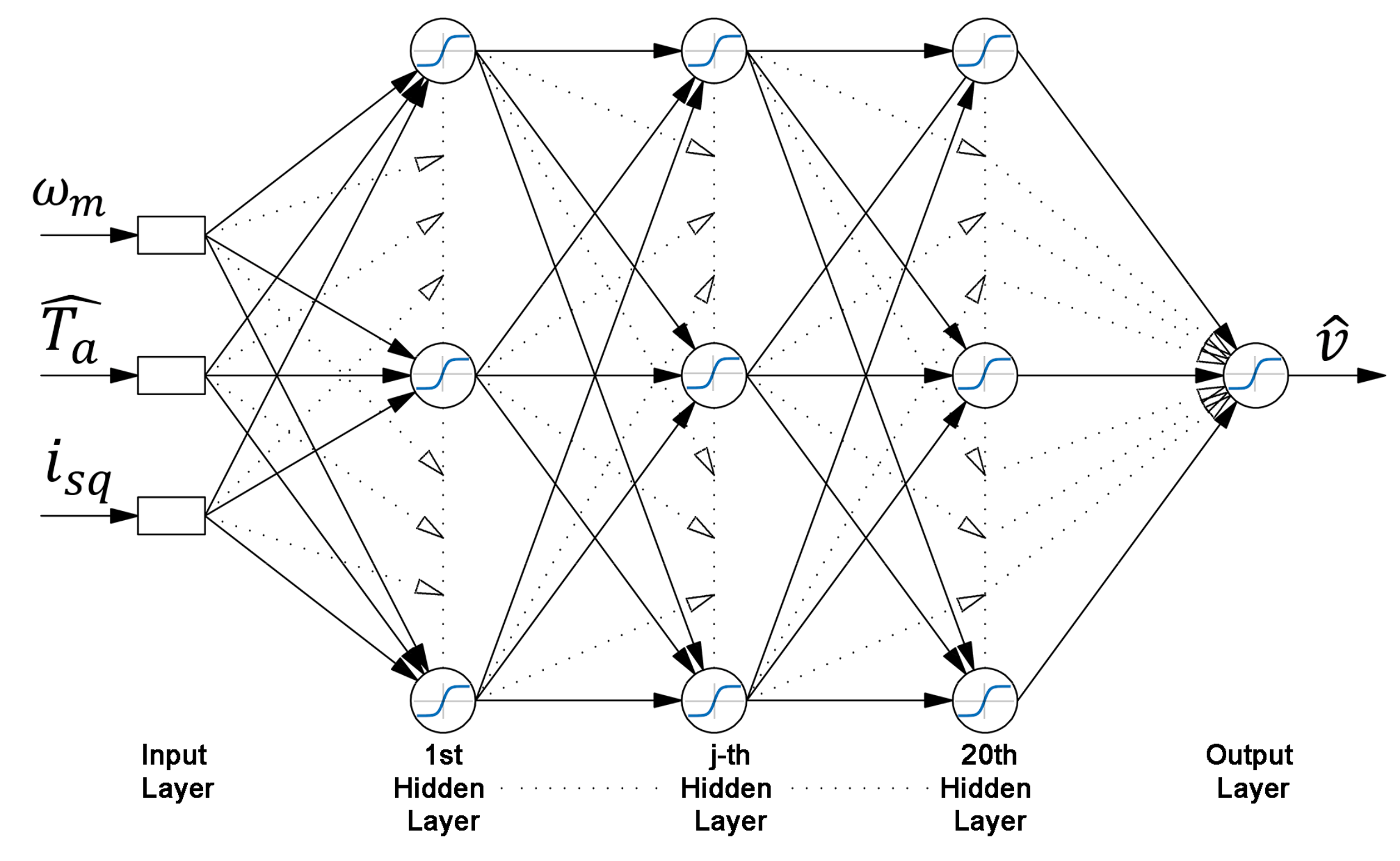
3.4. Wind Speed Estimation
3.4.1. Shallow NN WSE
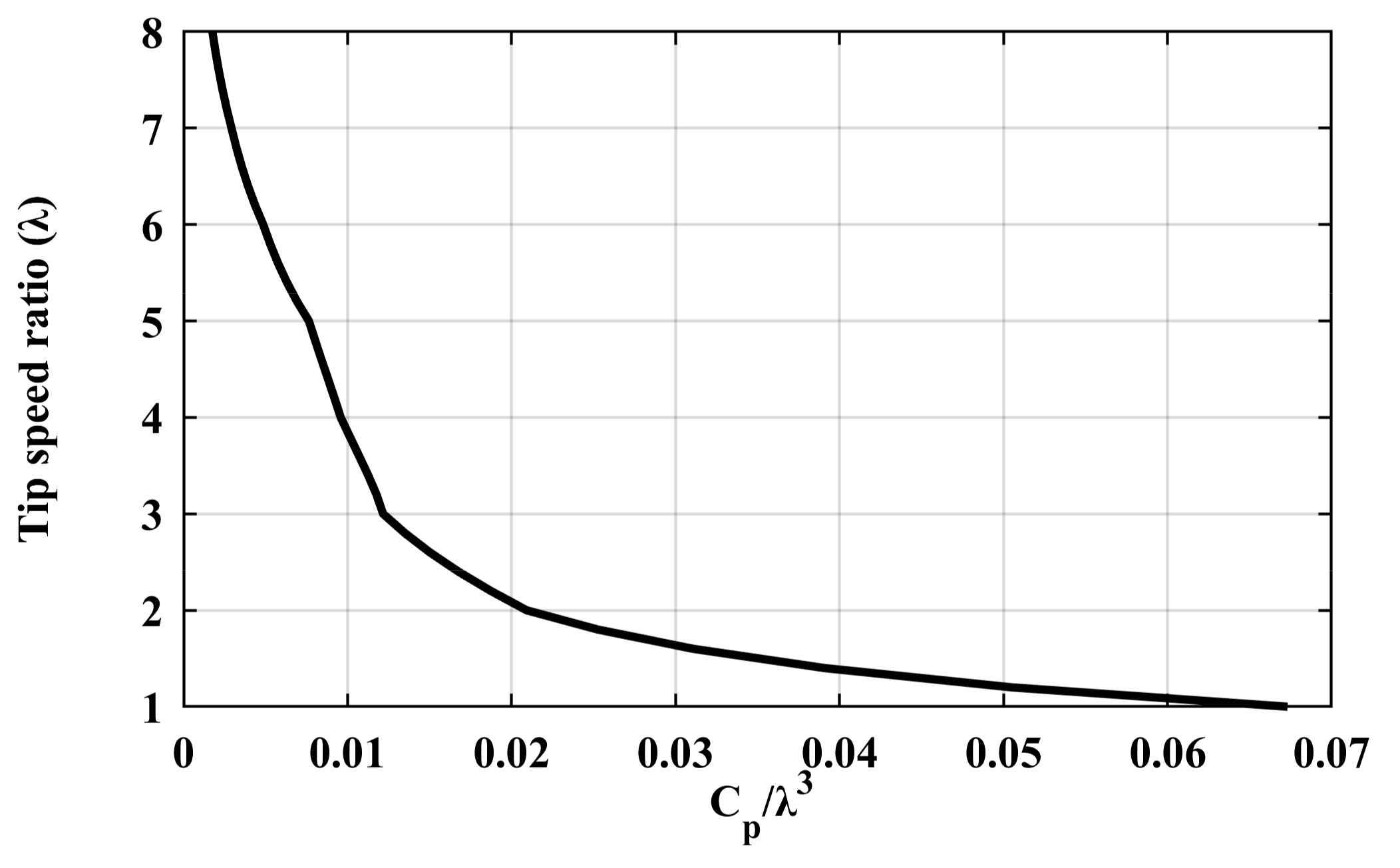
3.4.2. Model-based WSE
4. Experimental Results
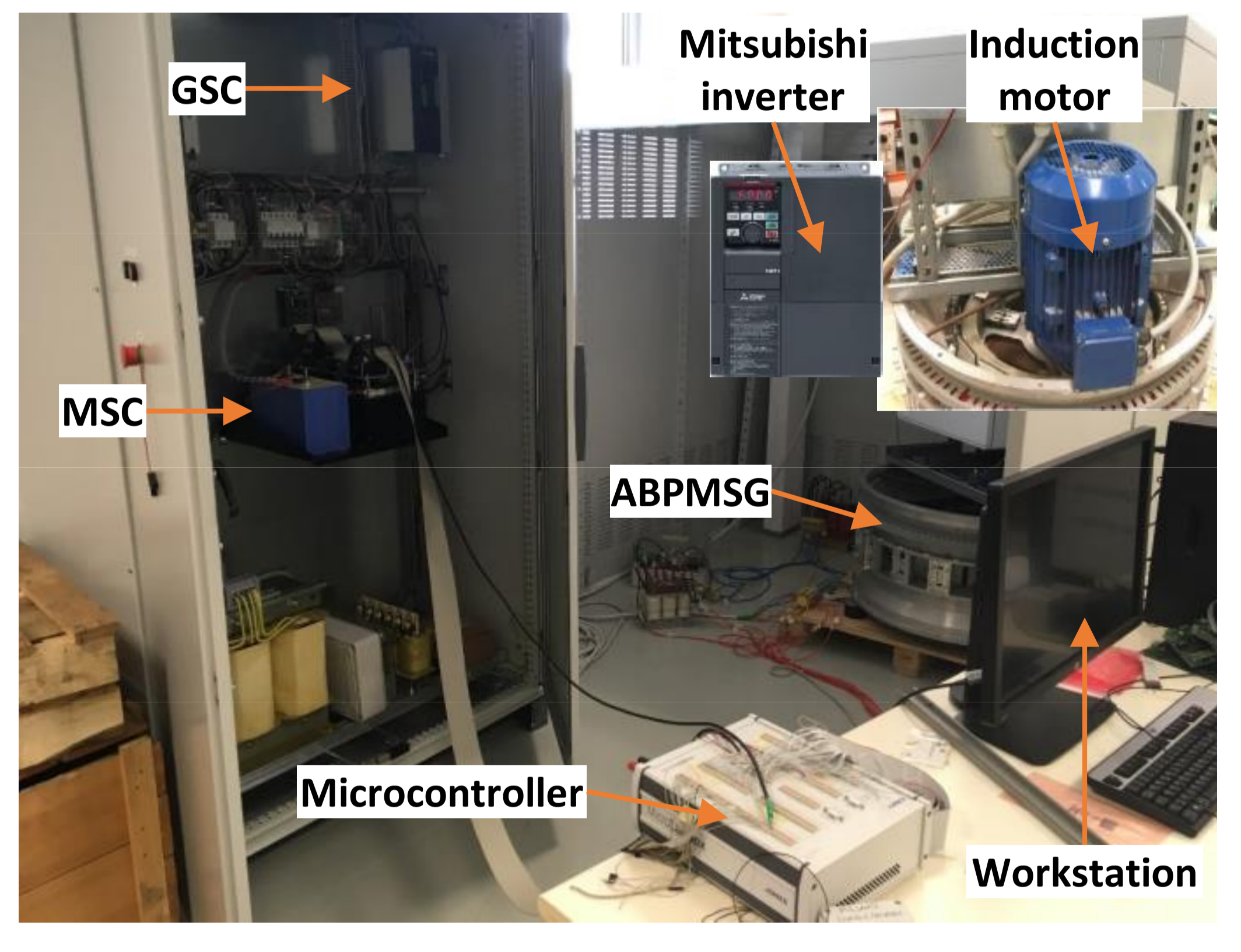
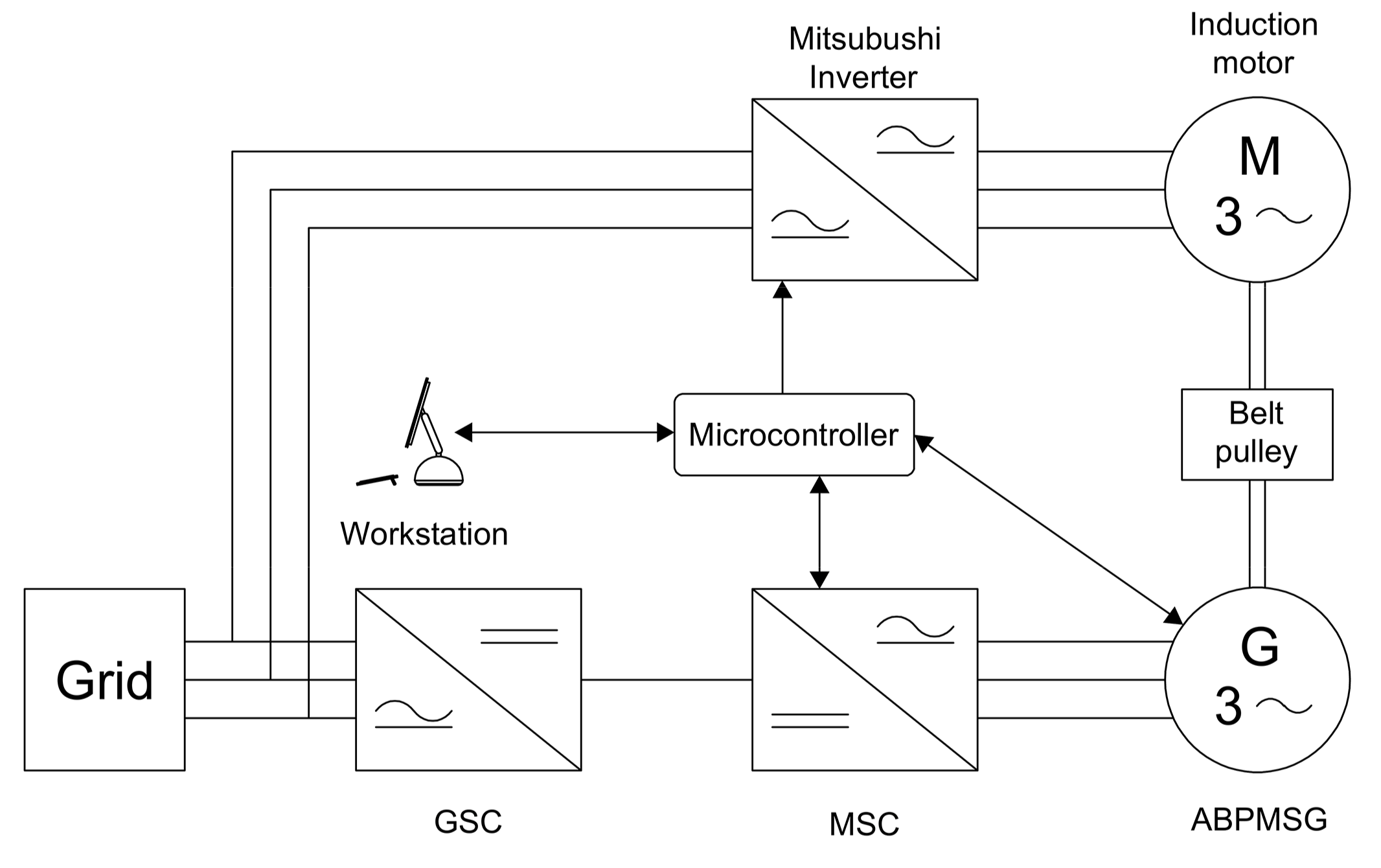
4.1. Test Rig Overview
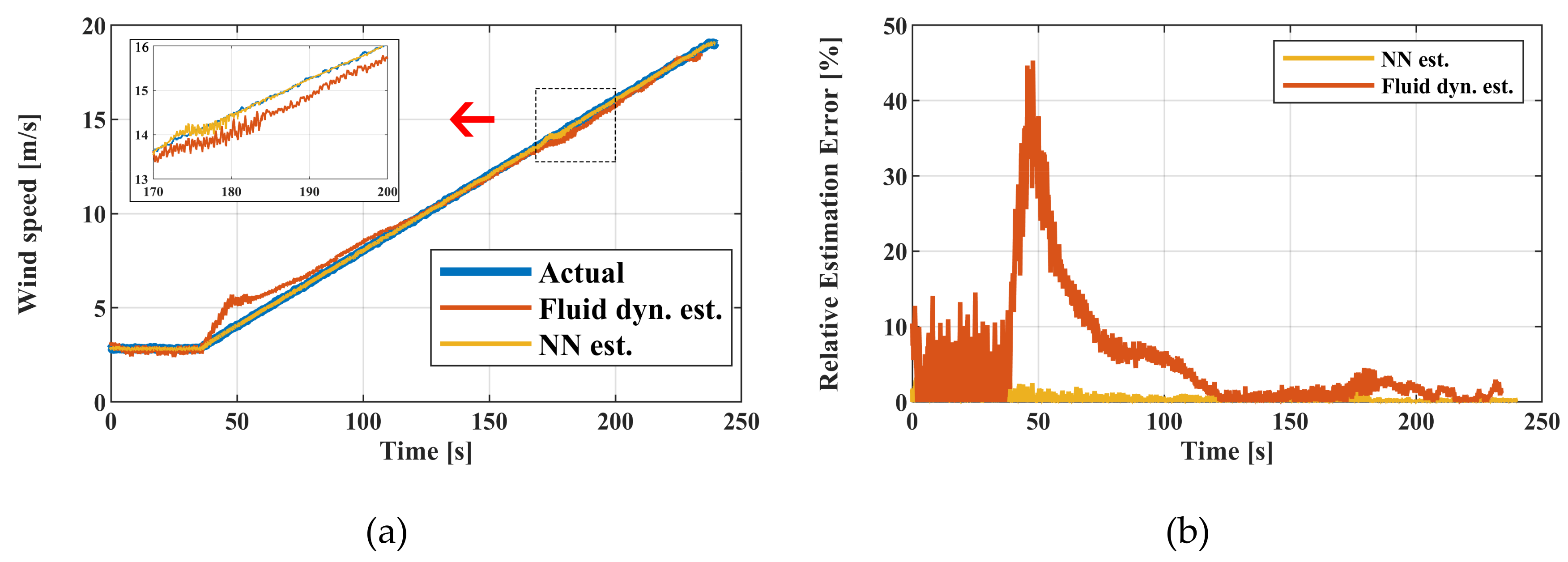
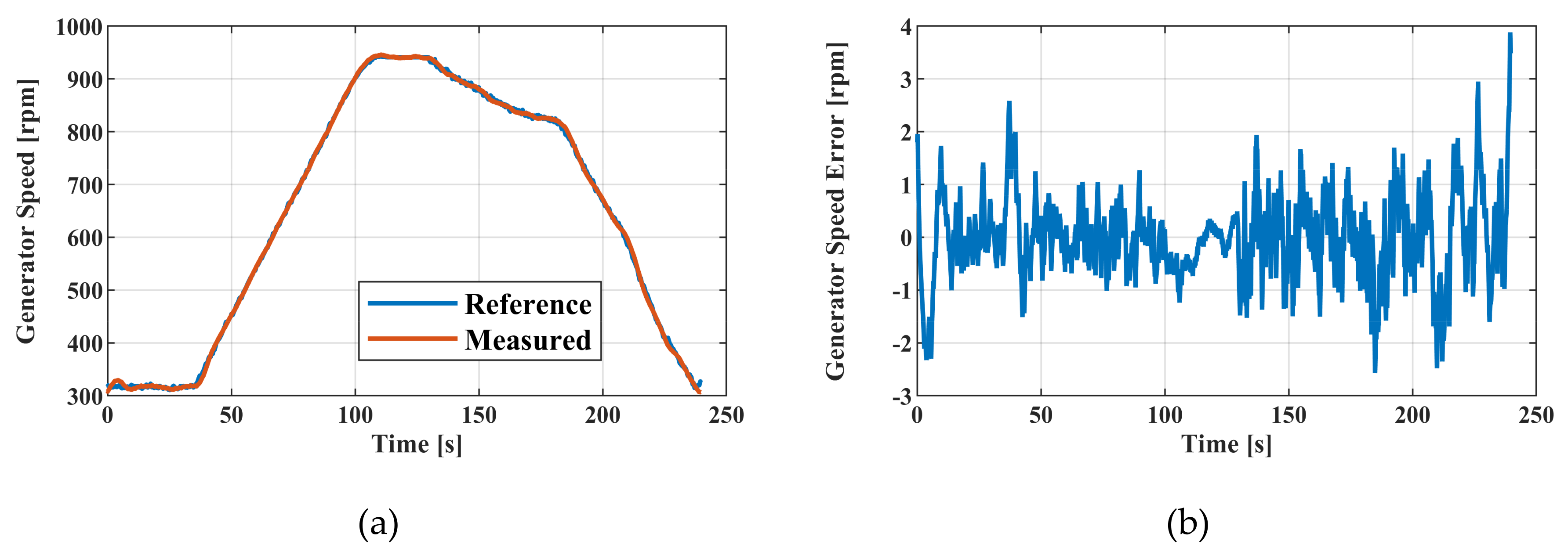
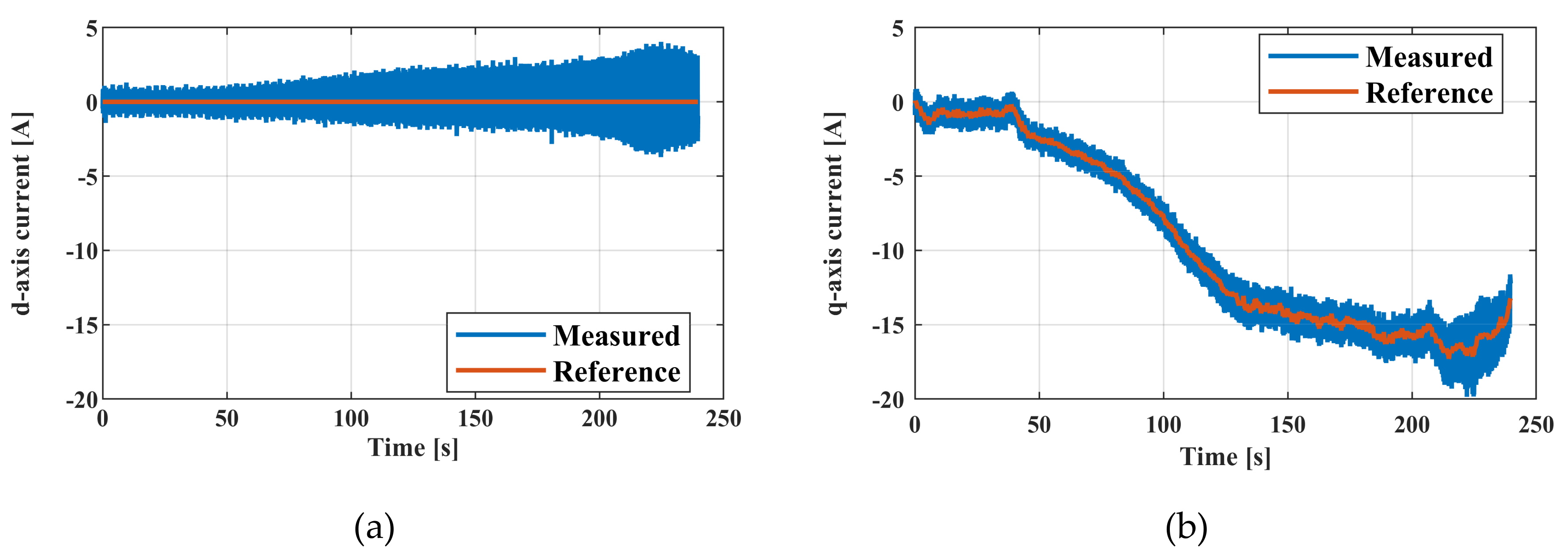
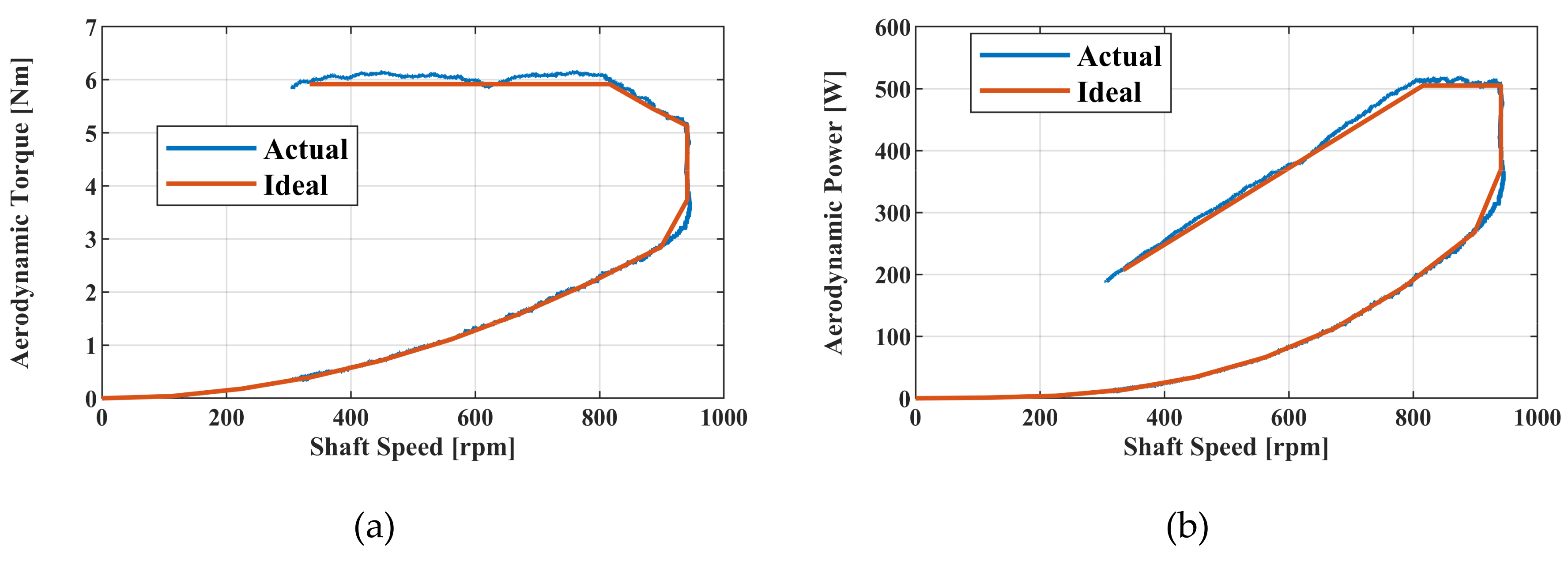
4.2. Results
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Appendix A
Appendix B
References
- Lumbreras, C.; Guerrero, J.M.; Fernandez, D.; Reigosa, D.D.; González-Moral, C.; Briz, F. Analysis and Control of the Inductorless Boost Rectifier for Small-Power Wind-Energy Converters. IEEE Trans. Ind. Appl. 2018, 55, 689–700. [Google Scholar] [CrossRef]
- Micallef, D.; van Bussel, G. A Review of Urban Wind Energy Research: Aerodynamics and Other Challenges. Energies 2018, 11, 2204. [Google Scholar] [CrossRef] [Green Version]
- Rodriguez-Hernandez, O.; Martinez, M.; Lopez-Villalobos, C.; Garcia, H.; Campos-Amezcua, R. Techno-Economic Feasibility Study of Small Wind Turbines in the Valley of Mexico Metropolitan Area. Energies 2019, 12, 890. [Google Scholar] [CrossRef] [Green Version]
- Gough, M.; Lotfi, M.; Castro, R.; Madhlopa, A.; Khan, A.; Catalão, J.P. Urban Wind Resource Assessment: A Case Study on Cape Town. Energies 2019, 12, 1479. [Google Scholar] [CrossRef] [Green Version]
- Elnaggar, M.; Edwan, E.; Ritter, M. Wind energy potential of Gaza using small wind turbines: A feasibility study. Energies 2017, 10, 1229. [Google Scholar] [CrossRef]
- Acosta, J.L.; Combe, K.; Djokic, S.Ž.; Hernando-Gil, I. Performance assessment of micro and small-scale wind turbines in urban areas. IEEE Syst. J. 2011, 6, 152–163. [Google Scholar] [CrossRef]
- Szabó, L. A survey on modular variable reluctance generators for small wind turbines. IEEE Trans. Ind. Appl. 2019, 55, 2548–2557. [Google Scholar] [CrossRef]
- Palmieri, M.; Bozzella, S.; Cascella, G.L.; Bronzini, M.; Torresi, M.; Cupertino, F. Wind Micro-Turbine Networks for Urban Areas: Optimal Design and Power Scalability of Permanent Magnet Generators. Energies 2018, 11, 2759. [Google Scholar] [CrossRef] [Green Version]
- Shafiei, A.; Dehkordi, B.M.; Farhangi, S.; Kiyoumarsi, A. Overall power control strategy for small-scale WECS incorporating flux weakening operation. IET Renew. Power Gener. 2016, 10, 1264–1277. [Google Scholar] [CrossRef]
- Maher, R.A.; Abdelsalam, A.K.; Dessouky, Y.G.; Nouman, A. High performance state-flow based MPPT technique for micro WECS. IET Renew. Power Gener. 2019, 13, 3009–3021. [Google Scholar] [CrossRef]
- Lumbreras, C.; Guerrero, J.M.; Garcia, P.; Briz, F.; Reigosa, D.D. Control of a small wind turbine in the high wind speed region. IEEE Trans. Power Electron. 2015, 31, 6980–6991. [Google Scholar] [CrossRef]
- Shafiei, A.; Dehkordi, B.M.; Kiyoumarsi, A.; Farhangi, S. A control approach for a small-scale PMSG-based WECS in the whole wind speed range. IEEE Trans. Power Electron. 2017, 32, 9117–9130. [Google Scholar] [CrossRef]
- Lee, J.; Kim, Y.S. Sensorless fuzzy-logic-based maximum power point tracking control for a small-scale wind power generation system with a switched-mode rectifier. IET Renew. Power Gener. 2016, 10, 194–202. [Google Scholar] [CrossRef]
- Chen, J.; Chen, J.; Gong, C. New overall power control strategy for variable-speed fixed-pitch wind turbines within the whole wind velocity range. IEEE Trans. Ind. Electron. 2012, 60, 2652–2660. [Google Scholar] [CrossRef]
- Dalala, Z.M.; Zahid, Z.U.; Lai, J.S.J. New overall control strategy for small-scale WECS in MPPT and stall regions with mode transfer control. IEEE Trans. Energy Conv. 2013, 28, 1082–1092. [Google Scholar] [CrossRef]
- Hui, J.C.; Bakhshai, A.; Jain, P.K. An energy management scheme with power limit capability and an adaptive maximum power point tracking for small standalone PMSG wind energy systems. IEEE Trans. Power Electron. 2015, 31, 4861–4875. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Lumbreras, C.; Reigosa, D.D.; Garcia, P.; Briz, F. Control and emulation of small wind turbines using torque estimators. IEEE Trans. Ind. Appl. 2017, 53, 4863–4876. [Google Scholar] [CrossRef] [Green Version]
- Chen, J.; Lin, T.; Wen, C.; Song, Y. Design of a unified power controller for variable-speed fixed-pitch wind energy conversion system. IEEE Trans. Ind. Electron. 2016, 63, 4899–4908. [Google Scholar] [CrossRef]
- Senanayaka, J.S.L.; Karimi, H.R.; Robbersmyr, K.G. A novel soft-stall power control for a small wind turbine. In Proceedings of the IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, Scotland, UK, 19 June 2017; pp. 940–945. [Google Scholar]
- Jiawei, C.; Changyun, W.; Yongduan, S. Power control strategy for variable-speed fixed-pitch wind turbines. In Proceedings of the 13th International Conference on Control Automation Robotics & Vision (ICARCV), Singapore, 10 December 2014; pp. 559–564. [Google Scholar]
- Morimoto, S.; Nakayama, H.; Sanada, M.; Takeda, Y. Sensorless output maximization control for variable-speed wind generation system using IPMSG. IEEE Trans. Ind. Appl. 2005, 41, 60–67. [Google Scholar] [CrossRef]
- Wang, Y.F.; Yang, L.; Wang, C.S.; Li, W.; Qie, W.; Tu, S.J. High step-up 3-phase rectifier with fly-back cells and switched capacitors for small-scaled wind generation systems. Energies 2015, 8, 2742–2768. [Google Scholar] [CrossRef]
- Do, T.D. Disturbance observer-based fuzzy SMC of WECSs without wind speed measurement. IEEE Access 2016, 5, 147–155. [Google Scholar] [CrossRef]
- Corradini, M.L.; Ippoliti, G.; Orlando, G. Robust control of variable-speed wind turbines based on an aerodynamic torque observer. IEEE Trans. Control Syst. Technol. 2013, 21, 1199–1206. [Google Scholar] [CrossRef]
- Merabet, A. Adaptive sliding mode speed control for wind energy experimental system. Energies 2018, 11, 2238. [Google Scholar] [CrossRef]
- Nouali, S.; Ouali, A. Multi-layer neural network for sensorless MPPT control for wind energy conversion system using doubly fed twin stator induction generator. In Proceedings of the Eighth International Multi-Conference on Systems, Signals & Devices, Sousse, Tunisia, 22 March 2011; pp. 1–7. [Google Scholar]
- Martyanov, A.; Martyanov, N.; Sirotkin, E. State Observer for Variable Speed Wind Turbine. In Proceedings of the International Ural Conference on Green Energy (UralCon), Chelyabinsk, Russia, 4 October 2018; pp. 97–100. [Google Scholar]
- Liu, H.; Locment, F.; Sechilariu, M. Integrated Control for Small Power Wind Generator. Energies 2018, 11, 1217. [Google Scholar] [CrossRef] [Green Version]
- Qiao, W.; Yang, X.; Gong, X. Wind speed and rotor position sensorless control for direct-drive PMG wind turbines. IEEE Trans. Ind. Appl. 2011, 48, 3–11. [Google Scholar] [CrossRef]
- Liu, H.; Locment, F.; Sechilariu, M. Experimental analysis of impact of maximum power point tracking methods on energy efficiency for small-scale wind energy conversion system. IET Renew. Power Gener. 2016, 11, 389–397. [Google Scholar] [CrossRef]
- Saleh, S.A. Testing the performance of a resolution-level MPPT controller for PMG-based wind energy conversion systems. IEEE Trans. Ind. Appl. 2017, 53, 2526–2540. [Google Scholar] [CrossRef]
- Hussain, J.; Mishra, M.K. An Efficient Wind Speed Computation Method Using Sliding Mode Observers in Wind Energy Conversion System Control Applications. IEEE Trans. Ind. Appl. 2019, 56, 730–739. [Google Scholar] [CrossRef]
- Yaylacı, E.K. Discrete-time integral terminal sliding mode based maximum power point controller for the PMSG-based wind energy system. IET Power Electron. 2019, 12, 3688–3696. [Google Scholar]
- Yazici, İ.; Yaylaci, E.K. Maximum power point tracking for the permanent magnet synchronous generator-based WECS by using the discrete-time integral sliding mode controller with a chattering-free reaching law. IET Power Electron. 2017, 10, 1751–1758. [Google Scholar] [CrossRef]
- Wei, C.; Zhang, Z.; Qiao, W.; Qu, L. An adaptive network-based reinforcement learning method for MPPT control of PMSG wind energy conversion systems. IEEE Trans. Power Electron. 2016, 31, 7837–7848. [Google Scholar] [CrossRef]
- Werle, M.; Presz, W. Ducted Wind/Water Turbines and Propellers Revisited. J. Propul. Power 2008, 24, 1146–1150. [Google Scholar] [CrossRef]
- Torresi, M.; Postiglione, N.; Filianoti, P.F.; Fortunato, B.; Camporeale, S.M. Design of a ducted wind turbine for offshore floating platforms. Wind Eng. 2016, 40, 468–474. [Google Scholar] [CrossRef]
- Khamlaj, T.A.; Rumpfkeil, M.P. Analysis and optimization of ducted wind turbines. Energy 2018, 162, 1234–1252. [Google Scholar] [CrossRef]
- Grant, A.; Johnstone, C.; Kelly, N. Urban wind energy conversion: The potential of ducted turbines. Renew. Energy 2008, 33, 1157–1163. [Google Scholar] [CrossRef] [Green Version]
- Ali, M.A.S.; Mehmood, K.K.; Baloch, S.; Kim, C.H. Wind-Speed Estimation and Sensorless Control for SPMSG-Based WECS Using LMI-Based SMC. IEEE Access 2020, 8, 26524–26535. [Google Scholar] [CrossRef]
- Zhao, H.; Wu, Q.; Rasmussen, C.N.; Blanke, M. L1 Adaptive Speed Control of a Small Wind Energy Conversion System for Maximum Power Point Tracking. IEEE Trans. Energy Convers. 2014, 29, 576–584. [Google Scholar] [CrossRef] [Green Version]
- Orlando, N.A.; Liserre, M.; Monopoli, V.G.; Dell’Aquila, A. Speed sensorless control of a PMSG for small wind turbine systems. In Proceedings of the IEEE International Symposium on Industrial Electronics, Seoul, Korea, 5–8 July 2009; pp. 1540–1545. [Google Scholar]
- Zhang, Z.; Zhao, Y.; Qiao, W.; Qu, L. A space-vector-modulated sensorless direct-torque control for direct-drive PMSG wind turbines. IEEE Trans. Ind. Appl. 2014, 50, 2331–2341. [Google Scholar] [CrossRef]
- Li, D.Y.; Cai, W.C.; Li, P.; Jia, Z.J.; Chen, H.J.; Song, Y.D. Neuroadaptive variable speed control of wind turbine with wind speed estimation. IEEE Trans. Ind. Electron. 2016, 63, 7754–7764. [Google Scholar] [CrossRef]
- Hui, J.C.; Bakhshai, A.; Jain, P.K. A sensorless adaptive maximum power point extraction method with voltage feedback control for small wind turbines in off-grid applications. IEEE Trans. Emerg. Sel. Top. Power Electron. 2015, 3, 817–828. [Google Scholar] [CrossRef]
- Syahputra, R.; Soesanti, I. Performance Improvement for Small-Scale Wind Turbine System Based on Maximum Power Point Tracking Control. Energies 2019, 12, 3938. [Google Scholar] [CrossRef] [Green Version]
- Uddin, M.N.; Patel, N. Maximum power point tracking control of IPMSG incorporating loss minimization and speed sensorless schemes for wind energy system. IEEE Trans. Ind. Electron. 2015, 52, 1902–1912. [Google Scholar] [CrossRef]
- Qian, X.; Huang, H.; Chen, X.; Huang, T. Generalized Hybrid Constructive Learning Algorithm for Multioutput RBF Networks. IEEE Trans. Cybern. 2017, 47, 3634–3648. [Google Scholar] [CrossRef] [PubMed]
- Wilamowski, B.M.; Yu, H. Improved Computation for Levenberg–Marquardt Training. IEEE Trans. Neural Netw. 2010, 21, 930–937. [Google Scholar] [CrossRef] [PubMed]
- Dereyne, S.; Defreyne, P.; Algoet, E.; Derammelaere, S.; Stockman, K. An efficiency measurement campaign on belt drives. Proceedings of 9th International Conference on Energy Efficiency in Motor Driven Systems, Helsinky, Finland, 15–17 September 2015. [Google Scholar]
- Chen, T.F.; Lee, D.W.; Sung, C.K. An experimental study on transmission efficiency of a rubber V-belt CVT. Mech. Mach. Theory 1998, 33, 351–363. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Value |
|---|---|---|
| Rated Power | ||
| Rated Speed | ||
| Maximum Torque | ||
| Blade Radius | ||
| Blade Mass | ||
| Total Inertia | ||
| Optimal TSR | ||
| Optimal Power Coefficient | 1.048 |
| Symbol | Quantity | Value |
|---|---|---|
| Rated Power | ||
| Rated Speed | ||
| Rated Current | ||
| Stator Inductance | ||
| Phase Resistance | 34.64 | |
| PM Flux Linkage | ||
| Number of Pole Pairs | 50 |
| Wind Speed Range | Control Law |
|---|---|
| Parameters | Value | |
|---|---|---|
| ABPMSG | ||
| Rated Torque | 5.5 Nm | |
| Rated Speed | 180 rpm | |
| Rated Current | ||
| Stator Resistance | 0.33 | |
| Stator Inductance | ||
| PM Flux Linkage | ||
| Number of pole pairs | 15 | |
| Total inertia (ABPMSG + IM) | ||
| IM | ||
| Rated Speed | 2930 rpm | |
| Rated Power | 9.2 kW |
| Main Features | VSC + LO (Proposed in This Paper) | Control Scheme Proposed in [20] |
|---|---|---|
| Wind turbine | VSFP Ducted HAWT | Conventional VSFP wind turbine |
| Electrical generator | ABPMSG | Conventional PMSG |
| Power converter topology | Grid connected back-to-back PWM inverters | Passive diode rectifier + buck converter connected to a battery bank |
| MPPT control method | Optimal TSRM odel-based approach with wind speed estimation | PSF Model-based approach with aerodynamic power estimation |
| CSC method | FOC with a PI speed closed loop | PID speed closed loop (no FOC) |
| CPC method | Open loop regulation | PID aerodynamic power closed loop |
| CTC method | Open loop regulation | Not performed |
| Threshold | Speed |
|---|---|
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Calabrese, D.; Tricarico, G.; Brescia, E.; Cascella, G.L.; Monopoli, V.G.; Cupertino, F. Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer. Energies 2020, 13, 4647. https://doi.org/10.3390/en13184647
Calabrese D, Tricarico G, Brescia E, Cascella GL, Monopoli VG, Cupertino F. Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer. Energies. 2020; 13(18):4647. https://doi.org/10.3390/en13184647
Chicago/Turabian StyleCalabrese, Diego, Gioacchino Tricarico, Elia Brescia, Giuseppe Leonardo Cascella, Vito Giuseppe Monopoli, and Francesco Cupertino. 2020. "Variable Structure Control of a Small Ducted Wind Turbine in the Whole Wind Speed Range Using a Luenberger Observer" Energies 13, no. 18: 4647. https://doi.org/10.3390/en13184647