


Impact of PCA Pre-Normalization Methods on Ground Reaction Force Estimation Accuracy

Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials and Protocol
- (1)
- Normal walking (7–20 steps);
- (2)
- Slow walking (8–22 steps).
2.2. Normalization Methods
2.3. Principal Component Analysis
- (1)
- It takes less computation time;
- (2)
- Redundant, irrelevant, and noisy data can be removed;
- (3)
- Data quality can be improved;
- (4)
- Some ML methods do not perform well on high-dimensional data. To address this issue and improve accuracy, for example, in ANN, it can be helpful to reduce the dimension of the data.
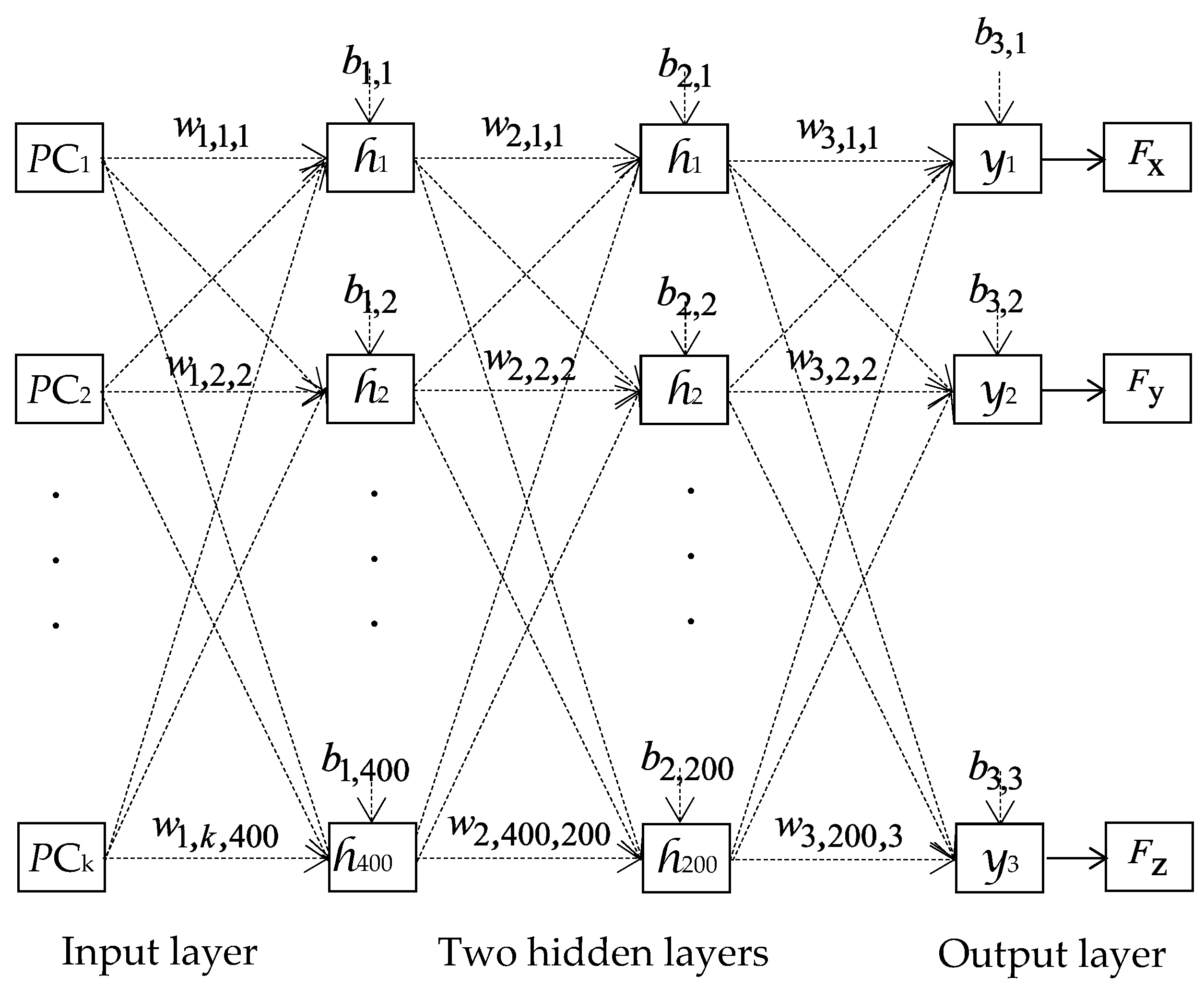
2.4. Machine Learning Methods for GRF Component Estimation
- Artificial Neural Network (ANN)
- Least Square (LS) Method
- Support Vector Regression (SVR) Method
2.5. Machine Learning Modeling
2.6. Metrics
3. Results
3.1. Impact of Normalization Methods on PCA for ANN, LS, and SVR for Estimating GRF Components
3.2. An Illustration Example of Slow and Normal Walking
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Hadi, R.H.; Hady, H.N.; Hasan, A.M.; Al-Jodah, A.; Humaidi, A.J. Improved Fault Classification for Predictive Maintenance in Industrial IoT Based on AutoML: A Case Study of Ball-Bearing Faults. Processes 2023, 11, 1507. [Google Scholar] [CrossRef]
- Haidar, A.; Verma, B. Monthly Rainfall Forecasting Using One-Dimensional Deep Convolutional Neural Network. IEEE Access 2018, 6, 69053–69063. [Google Scholar] [CrossRef]
- Jamil, F.; Iqbal, N.; Ahmad, S.; Kim, D.-H. Toward Accurate Position Estimation Using Learning to Prediction Algorithm in Indoor Navigation. Sensors 2020, 20, 4410. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, A.S.; Pirscoveanu, C.; Rasmussen, J. Predicting vertical ground reaction forces in running from the sound of footsteps. Sensors 2022, 22, 9640. [Google Scholar] [CrossRef] [PubMed]
- Honert, E.C.; Hoitz, F.; Blades, S.; Nigg, S.R.; Nigg, B.M. Estimating Running Ground Reaction Forces from Plantar Pressure during Graded Running. Sensors 2022, 22, 3338. [Google Scholar] [CrossRef] [PubMed]
- Liu, C. Risk Prediction of Digital Transformation of Manufacturing Supply Chain Based on Principal Component Analysis and Backpropagation Artificial Neural Network. Alex. Eng. J. 2022, 61, 775–784. [Google Scholar] [CrossRef]
- Gadekallu, T.R.; Khare, N.; Bhattacharya, S.; Singh, S.; Maddikunta, P.K.R.; Srivastava, G. Deep Neural Networks to Predict Diabetic Retinopathy. J. Ambient. Intell. Humaniz. Comput. 2023, 14, 5407–5420. [Google Scholar] [CrossRef]
- Fang, Q.; Zhong, Y.; Xie, C.; Zhang, H.; Li, S. Research on PCA-LSTM-Based Short-Term Load Forecasting Method. IOP Conf. Ser. Earth Environ. Sci. 2020, 495, 012015. [Google Scholar] [CrossRef]
- Jolliffe, I.T.; Cadima, J. Principal Component Analysis: A Review and Recent Developments. Phil. Trans. R. Soc. A 2016, 374, 20150202. [Google Scholar] [CrossRef]
- Stein, S.A.M.; Loccisano, A.E.; Firestine, S.M.; Evanseck, J.D. Chapter 13 Principal Components Analysis: A review of its application on Molecular Dynamics data. Annu. Rep. Comput. Chem. 2006, 2, 233–261. [Google Scholar]
- Greenacre, M.; Groenen, P.J.F.; Hastie, T.; D’Enza, A.I.; Markos, A.; Tuzhilina, E. Principal Component Analysis. Nat. Rev. Methods Primers 2022, 2, 100. [Google Scholar] [CrossRef]
- Rouhani, H.; Favre, J.; Crevoisier, X.; Aminian, K. Ambulatory Assessment of 3D Ground Reaction Force Using Plantar Pressure Distribution. Gait Posture 2010, 32, 311–316. [Google Scholar] [CrossRef] [PubMed]
- Sim, T.; Kwon, H.; Oh, S.E.; Joo, S.-B.; Choi, A.; Heo, H.M.; Kim, K.; Mun, J.H. Predicting Complete Ground Reaction Forces and Moments During Gait With Insole Plantar Pressure Information Using a Wavelet Neural Network. J. Biomech. Eng. 2015, 137, 091001. [Google Scholar] [CrossRef] [PubMed]
- Jacobs, D.A.; Ferris, D.P. Estimation of Ground Reaction Forces and Ankle Moment with Multiple, Low-Cost Sensors. J. Neuroeng. Rehabil. 2015, 12, 90. [Google Scholar] [CrossRef] [PubMed]
- Joo, S.-B.; Oh, S.E.; Mun, J.H. Improving the Ground Reaction Force Prediction Accuracy Using One-Axis Plantar Pressure: Expansion of Input Variable for Neural Network. J. Biomech. 2016, 49, 3153–3161. [Google Scholar] [CrossRef] [PubMed]
- Caderby, T.; Begue, J.; Dalleau, G.; Peyrot, N. Measuring Foot Progression Angle during Walking Using Force-Plate Data. Appl. Mech. 2022, 3, 174–181. [Google Scholar] [CrossRef]
- Jain, A.; Nandakumar, K.; Ross, A. Score Normalization in Multimodal Biometric Systems. Pattern Recognit. 2005, 38, 2270–2285. [Google Scholar] [CrossRef]
- Aksu, G.; Güzeller, C.O.; Eser, M.T. The Effect of the Normalization Method Used in Different Sample Sizes on the Success of Artificial Neural Network Model. Int. J. Assess. Tools Educ. 2019, 6, 170–192. [Google Scholar] [CrossRef]
- Anysz, H.; Zbiciak, A.; Ibadov, N. The Influence of Input Data Standardization Method on Prediction Accuracy of Artificial Neural Networks. Procedia Eng. 2016, 153, 66–70. [Google Scholar] [CrossRef]
- Amorim, L.; Cavalcanti, G.D.C.; Cruz, R.M.O. The Choice of Scaling Technique Matters for Classification Performance. Appl. Soft Comput. 2023, 133, 109924. [Google Scholar] [CrossRef]
- Ruppert, D.; Hampel, F.R.; Ronchetti, E.; Rousseeuw, P.J.; Stahel, W.A. Robust Statistics: The Approach Based on Influence Functions. Technometrics 1987, 29, 240. [Google Scholar] [CrossRef]
- Velliangiri, S.; Alagumuthukrishnan, S.; Thankumar Joseph, S.I. A Review of Dimensionality Reduction Techniques for Efficient Computation. Procedia Comput. Sci. 2019, 165, 104–111. [Google Scholar] [CrossRef]
- Petrovska, B.; Zdravevski, E.; Lameski, P.; Corizzo, R.; Štajduhar, I.; Lerga, J. Deep Learning for Feature Extraction in Remote Sensing: A Case-Study of Aerial Scene Classification. Sensors 2020, 20, 3906. [Google Scholar] [CrossRef] [PubMed]
- Gani, W.; Taleb, H.; Limam, M. Support Vector Regression Based Residual Control Charts. J. Appl. Stat. 2010, 37, 309–324. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Activity | Foot | Dataset |
|---|---|---|
| Slow walking | Left | 17,732 (128) |
| Right | 15,008 (112) | |
| Normal walking | Left | 12,719 (111) |
| Right | 11,100 (101) |
| Strategy | Normalization Method | Number of PCs | ||||||
|---|---|---|---|---|---|---|---|---|
| PCA-ANN | PCA-LS | PCA-SVR | PCA-ANN | PCA-LS | PCA-SVR | |||
| Intras | MM[0, 1] | 10-9 | 13.89 (0.712) ± 0.56 (0.016) | 14.97 (0.641) ± 0.67 0.028) | 13.83 (0.710) ± 0.51 (0.009) | 30.92 (0.647) ± 2.13 (0.032) | 33.05 (0.546) ± 1.04 (0.025) | 29.85 (0.666) ± 1.80 (0.029) |
| MM[−1, 1] | 10-9 | 14.12 (0.707) ± 0.87 (0.023) | 14.99 (0.639) ± 0.68 (0.028) | 14.30 (0.681) ± 0.46 (0.018) | 31.48 (0.632) ± 2.51 (0.051) | 33.03 (0.547) ± 1.03 (0.024) | 29.04 (0.675) ± 1.13 (0.020) | |
| Mean | 10-9 | 14.09 (0.712) ± 1.01 (0.025) | 15.12 (0.633) ± 0.78 (0.028) | 13.78 (0.712) ± 0.56 (0.010) | 30.93 (0.643) ± 2.17 (0.038) | 33.09 (0.544) ± 1.11 (0.031) | 29.24 (0.679) ± 1.70 (0.028) | |
| ZS | 10 | 13.88 (0.720) ± 1.05 (0.029) | 15.11 (0.633) ± 0.77 (0.027) | 16.78 (0.549) ± 0.43 (0.020) | 30.21 (0.663) ± 1.55 (0.023) | 32.60 (0.562) ± 1.07 (0.031) | 36.11 (0.452) ± 0.96 (0.027) | |
| RS | 10-9 | 14.11 (0.706) ± 0.50 (0.015) | 15.20 (0.626) ± 0.88 (0.037) | 15.36 (0.644) 0.22 (0.019) | 30.28 (0.656) ± 1.74 (0.027) | 33.10 (0.545) ± 1.32 (0.020) | 31.79 (0.607) ± 0.87 (0.024) | |
| VS | 10 | 14.23 (0.697) ± 0.60 (0.019) | 14.92 (0.646) ± 0.69 (0.019) | 14.78 (0.656) ± 0.672 (0.021) | 31.33 (0.620) ± 1.22 (0.039) | 32.85 (0.555) ± 0.84 (0.030) | 32.85 (0.551) ± 0.84 (0.026) | |
| MLS | 10-9 | 14.11 (0.709) ± 0.70 (0.027) | 14.97 (0.641) ± 0.67 (0.028) | 13.83 (0.710) ± 0.51 (0.009) | 30.95 (0.644) ± 2.50 (0.042) | 33.05 (0.546) ± 1.04 (0.025) | 29.85 (0.666) ± 1.80 (0.029) | |
| DS | 6 | 14.82 (0.658) ± 0.83 (0.031) | 16.03 (0.559) ± 0.66 (0.072) | 15.18 (0.624) ± 0.63 (0.047) | 31.92 (0.599) ± 1.68 (0.041) | 33.04 (0.547) ± 1.00 (0.023) | 31.30 (0.607) ± 1.28 (0.024) | |
| Med | 9-8 | 15.40 (0.655) ± 0.99 (0.033) | 14.94 (0.640) ± 0.73 (0.029) | 17.57 (0.494) ± 0.49 (0.009) | 31.94 (0.613) ± 1.04 (0.035) | 33.16 (0.545) ± 1.33 (0.031) | 37.44 (0.362) ± 0.89 (0.035) | |
| Tanh | 10 | 15.20 (0.621) ± 0.72 (0.030) | 15.17 (0.630) ± 0.69 (0.021) | 15.19 (0.633) ± 0.77 (0.026) | 32.85 (0.550) ± 0.80 (0.049) | 33.10 (0.542) ± 1.09 (0.049) | 33.19 (0.535) ± 0.93 (0.048) | |
| BW | 9 | 14.80 (0.699) ± 1.01 (0.018) | 15.35 (0.648) ± 0.45 (0.024) | 19.29 (0.257) ± 0.63 (0.014) | 31.55 (0.627) ± 1.59 (0.044) | 33.66 (0.534) ± 1.25 (0.030) | 39.30 (0.006) ± 1.15 (0.001) | |
| LI | 9-8 | 14.47 (0.686) ± 0.54 (0.016) | 15.26 (0.621) ± 0.76 (0.029) | 19.13 (0.282) ± 0.61 (0.024) | 30.88 (0.647) ± 1.44 (0.035) | 33.52 (0.530) ± 0.86 (0.023) | 39.30 (0.013) ± 1.15 (0.008) | |
| Inters | MM[0, 1] | 10-9 | 17.48 (0.528) ± 3.92 (0.191) | 15.10 (0.610) ± 3.42 (0.138) | 17.68 (0.473) ± 2.97 (0.139) | 38.09 (0.538) ± 8.74 (0.123) | 32.62 (0.638) ± 6.62 (0.088) | 37.94 (0.527) ± 7.06 (0.097) |
| MM[−1,1] | 10-9 | 17.96 (0.528) ± 4.58 (0.203) | 15.16 (0.613) ± 3.38 (0.140) | 16.33 (0.546)± 4.40 (0.117) | 38.53 (0.574) ± 9.56 (0.091) | 32.61 (0.639) ± 6.63 (0.088) | 35.34 (0.513) ± 9.77 (0.114) | |
| Mean | 10-9 | 18.85 (0.525) ± 4.64 (0.191) | 14.87 (0.623) ± 3.86 (0.143) | 17.14 (0.502)± 3.50 (0.159) | 38.95 (0.529) ± 13.6 (0.201) | 31.43 (0.652) ± 6.29 (0.086) | 37.75 (0.528) ± 7.83 (0.084) | |
| ZS | 10 | 17.32 (0.526) ± 4.89 (0.205) | 15.12 (0.587) ± 2.96 (0.139) | 17.52 (0.514)± 4.23 (0.087) | 41.60 (0.528) ± 12.2 (0.134) | 32.32 (0.619) ± 6.93 (0.091) | 39.58 (0.175) ± 11.1 (0.071) | |
| RS | 10-9 | 18.01 (0.532) ± 4.93 (0.227) | 14.88 (0.593) ± 3.64 (0.195) | 16.94 (0.547) ± 4.46 (0.102) | 36.43 (0.585) ± 9.60 (0.077) | 32.28 (0.634) ± 7.27 (0.082) | 37.70 (0.370) ± 11.3 (0.085) | |
| VS | 10 | 14.66 (0.602) ± 3.32 (0.155) | 14.56 (0.620) ± 2.83 (0.136) | 14.94 (0.623) ± 3.60 (0.149) | 32.62 (0.649) ± 6.72 (0.053) | 32.07 (0.637) ± 6.71 (0.085) | 31.60 (0.636) ± 6.77 (0.085) | |
| MLS | 10-9 | 18.49 (0.525) ± 5.60 (0.201) | 15.10 (0.610) ± 3.42 (0.138) | 17.68 (0.473) ± 2.97 (0.139) | 38.89 (0.528) ± 11.7 (0.183) | 32.62 (0.638) ± 6.62 (0.088) | 37.94 (0.527) ± 7.06 (0.097) | |
| DS | 6 | 18.23 (0.521) ± 5.52 (0.198) | 17.26 (0.524) ± 4.54 (0.150) | 16.88 (0.532) ± 4.62 (0.159) | 33.89 (0.615) ± 7.11 (0.071) | 32.62 (0.625) ± 6.48 (0.094) | 32.52 (0.631) ± 6.69 (0.065) | |
| Med | 9-8 | 16.51 (0.567) ± 4.88 (0.152) | 14.68 (0.601) ± 3.14 (0.148) | 17.93 (0.486) ± 4.24 (0.113) | 35.35 (0.606) ± 7.85 (0.060) | 31.99 (0.634) ± 7.07 (0.094) | 39.68 (0.131) ± 11.3 (0.087) | |
| Tanh | 10 | 15.07 (0.616) ± 3.58 (0.138) | 14.78 (0.595) ± 2.88 (0.136) | 15.14 (0.605) ± 3.26 (0.140) | 31.81 (0.638) ± 6.99 (0.071) | 32.29 (0.620) ± 6.92 (0.092) | 31.50 (0.638) ± 7.09 (0.080) | |
| BW | 9 | 17.52 (0.567) ± 4.15 (0.106) | 16.00 (0.598) ± 3.85 (0.139) | 19.14 (0.286) ± 3.73 (0.081) | 41.60 (0.513) ± 10.0 (0.138) | 32.97 (0.624) ± 7.14 (0.074) | 40.06 (0.006) ± 11.0 (0.003) | |
| LI | 9-8 | 17.26 (0.530) ± 3.43 (0.150) | 14.49 (0.634) ± 3.11 (0.109) | 19.04 (0.310) ± 3.77 (0.082) | 42.90 (0.463) ± 12.3 (0.233) | 33.03 (0.610) ± 8.52 (0.097) | 40.06 (0.018) ± 11.0 (0.017) | |
| Strategy | Normalization Method | Number of PCs | |||
|---|---|---|---|---|---|
| PCA-ANN | PCA-LS | PCA-SVR | |||
| Intras | MM[0, 1] | 10-9 | 63.13 (0.977) ± 4.15 (0.003) | 83.36 (0.957) ± 12.67 (0.013) | 59.99 (0.979) ± 4.39 (0.003) |
| MM[−1, 1] | 10-9 | 64.70 (0.976) ± 4.63 (0.003) | 84.66 (0.956) ± 12.27 (0.013) | 73.40 (0.969) ± 1.62 (0.002) | |
| Mean | 10-9 | 62.84 (0.978) ± 3.95 (0.002) | 82.50 (0.959) ± 8.73 (0.008) | 59.35 (0.979) ± 3.16 (0.002) | |
| ZS | 10 | 63.38 (0.977) ± 5.15 (0.004) | 77.53 (0.964) ± 7.22 (0.007) | 160.81 (0.837) ± 6.03 (0.012) | |
| RS | 10-9 | 71.06 (0.971) ± 6.78 (0.005) | 96.11 (0.941) ± 22.12 (0.028) | 108.83 (0.931) ± 5.96 (0.009) | |
| VS | 10 | 72.93 (0.970) ± 5.55 (0.004) | 83.13 (0.958) ± 6.43 (0.008) | 87.15 (0.956) ± 11.69 (0.012) | |
| MLS | 10-9 | 66.40 (0.975) ± 5.77 (0.004) | 83.36 (0.957) ± 12.67 (0.013) | 59.99 (0.979) ± 4.39 (0.003) | |
| DS | 6 | 108.91 (0.941) ± 24.48 (0.020) | 123.45 (0.886) ± 42.53 (0.092) | 104.16 (0.924) ± 33.72 (0.059) | |
| Med | 9-8 | 112.89 (0.928) ± 13.25 (0.017) | 101.34 (0.936) ± 15.50 (0.022) | 185.00 (0.776) ± 7.14 (0.016) | |
| Tanh | 10 | 81.53 (0.959) ± 10.25 (0.010) | 79.49 (0.962) ± 7.37 (0.007) | 85.32 (0.96) ± 14.24 (0.011) | |
| BW | 9 | 61.84 (0.978) ± 4.67 (0.003) | 109.14 (0.945) ± 7.68 (0.006) | 271.29 (0.442) ± 6.35 (0.009) | |
| LI | 9-8 | 72.49 (0.969) ± 5.71 (0.005) | 84.87 (0.956) ± 12.36 (0.013) | 264.95 (0.478) ± 6.24 (0.010) | |
| Inters | MM[0, 1] | 10-9 | 107.47 (0.944) ± 25.07 (0.020) | 106.96 (0.940) ± 31.80 (0.030) | 112.41 (0.942) ± 42.21 (0.021) |
| MM[−1, 1] | 10-9 | 110.61 (0.936) ± 25.71 (0.016) | 106.95 (0.941) ± 31.81 (0.030) | 118.08 (0.934) ± 50.36 (0.030) | |
| Mean | 10-9 | 102.51 (0.942) ± 17.42 (0.025) | 98.15 (0.947) ± 25.42 (0.025) | 106.51 (0.946) ± 40.92 (0.022) | |
| ZS | 10 | 106.30 (0.933) ± 29.23 (0.029) | 98.63 (0.949) ± 24.00 (0.018) | 183.11 (0.808) ± 36.42 (0.046) | |
| RS | 10-9 | 120.47 (0.912) ± 38.21 (0.086) | 117.99 (0.919) ± 54.84 (0.085) | 146.61 (0.888) ± 45.29 (0.044) | |
| VS | 10 | 91.65 (0.949) ± 24.34 (0.013) | 101.65 (0.949) ± 36.60 (0.027) | 98.20 (0.951) ± 31.74 (0.030) | |
| MLS | 10-9 | 114.30 (0.938) ± 32.34 (0.017) | 106.96 (0.94) ± 31.80 (0.030) | 112.41 (0.942) ± 42.21 (0.021) | |
| DS | 6 | 149.84 (0.904) ± 54.20 (0.047) | 145.49 (0.896) ± 73.81 (0.090) | 120.89 (0.921) ± 59.96 (0.052) | |
| Med | 9-8 | 127.73 (0.905) ± 40.76 (0.035) | 95.79 (0.945) ± 20.06 (0.022) | 197.21 (0.766) ± 3360 (0.073) | |
| Tanh | 10 | 90.14 (0.952) ± 19.02 (0.019) | 96.70 (0.952) ± 26.18 (0.020) | 97.39 (0.951) ± 16.28 (0.023) | |
| BW | 9 | 95.87 (0.949) ± 27.95 (0.026) | 115.54 (0.946) ± 35.99 (0.024) | 269.09 (0.471) ± 25.96 (0.041) | |
| LI | 9-8 | 147.79 (0.923) ± 72.68 (0.032) | 108.84 (0.953) ± 35.87 (0.019) | 264.68 (0.497) ± 25.53 (0.041) | |
| Strategy | Normalization Method | Number of PCs | ||||||
|---|---|---|---|---|---|---|---|---|
| PCA-ANN | PCA-LS | PCA-SVR | PCA-ANN | PCA-LS | PCA-SVR | |||
| Intras | MM[0, 1] | 10-9 | 11.35 (0.887) ± 0.56 (0.009) | 13.86 (0.823) ± 0.58 (0.013) | 12.51 (0.857) ± 0.72 (0.011) | 33.47 (0.624) ± 1.75 (0.033) | 31.67 (0.624) ± 1.37 (0.026) | 31.64 (0.646) ± 1.50 (0.025) |
| MM[−1, 1] | 10-9 | 11.73 (0.881) ± 0.50 (0.008) | 13.67 (0.829) ± 0.73 (0.011) | 13.82 (0.825) ± 0.825 (0.010) | 32.00 (0.641) ± 1.20 (0.024) | 31.73 (0.622) ± 1.40 (0.026) | 32.66 (0.610) ± 1.79 (0.033) | |
| Mean | 10-9 | 11.40 (0.885) ± 0.58 (0.009) | 13.86 (0.823) ± 0.59 (0.013) | 12.49 (0.858) ± 0.73 (0.012) | 33.34 (0.621) ± 1.51 (0.031) | 31.67 (0.624) ± 1.376 (0.026) | 31.55 (0.649) ± 1.68 (0.028) | |
| ZS | 10 | 11.28 (0.888) ± 0.65 (0.013) | 13.66 (0.829) ± 0.75 (0.027) | 17.84 (0.699) ± 0.84 (0.016) | 32.38 (0.648) ± 1.75 (0.048) | 31.67 (0.625) ± 1.50 (0.015) | 37.65 (0.425) ± 1.47 (0.039) | |
| RS | 10-9 | 11.68 (0.880) ± 0.60 (0.010) | 13.38 (0.837) ± 0.64 (0.012) | 16.34 (0.753) ± 0.79 (0.019) | 33.12 (0.630) ± 2.06 (0.040) | 31.76 (0.621) ± 1.27 (0.015) | 35.93 (0.502) ± 1.78 (0.046) | |
| VS | 10 | 11.75 (0.876) ± 0.55 (0.012) | 13.34 (0.838) ± 0.36 (0.011) | 13.50 (0.835) ± 0.44 (0.011) | 31.34 (0.653) ± 1.44 (0.029) | 31.65 (0.624) ± 1.04 (0.023) | 31.26 (0.636) ± 1.03 (0.021) | |
| MLS | 10-9 | 11.51 (0.883) ± 0.48 (0.008) | 13.86 (0.823) ± 0.58 (0.013) | 12.50 (0.857) ± 0.72 (0.011) | 32.32 (0.636) ± 1.33 (0.032) | 31.67 (0.624) ± 1.37 (0.026) | 31.64 (0.646) ± 1.50 (0.025) | |
| DS | 6 | 12.79 (0.853) ± 0.55 (0.014) | 14.51 (0.804) ± 1.18 (0.027) | 13.66 (0.830) ± 0.91 (0.014) | 32.16 (0.624) ± 1.90 (0.030) | 32.12 (0.612) ± 1.28 (0.016) | 31.26 (0.637) ± 1.49 (0.013) | |
| Med | 9-8 | 14.88 (0.811) ± 1.64 (0.032) | 14.33 (0.809) ± 0.92 (0.028) | 19.37 (0.615) ± 0.75 (0.020) | 31.63 (0.665) ± 2.13 (0.030) | 31.56 (0.627) ± 1.04 (0.021) | 39.39 (0.292) ± 1.86 (0.061) | |
| Tanh | 10 | 13.36 (0.836) ± 0.63 (0.020) | 13.64 (0.829) ± 0.82 (0.028) | 14.26 (0.818) ± 0.84 (0.027) | 30.80 (0.649) ± 1.25 (0.014) | 31.46 (0.631) ± 1.32 (0.013) | 31.17 (0.644) ± 1.24 (0.012) | |
| BW | 9 | 12.55 (0.862) ± 0.80 (0.018) | 14.70 (0.799) ± 0.97 (0.025) | 22.91 (0.390) ± 0.88 (0.005) | 33.33 (0.613) ± 2.12 (0.057) | 31.94 (0.615) ± 1.35 (0.024) | 40.53 (0.002) ± 1.76 (0.004) | |
| LI | 9-8 | 11.53 (0.883) ± 0.52 (0.013) | 14.03 (0.819) ± 0.72 (0.015) | 22.59 (0.431) ± 0.86 (0.009) | 32.78 (0.621) ± 1.96 (0.049) | 32.01 (0.611) ± 1.23 (0.035) | 40.52 (0.032) ± 1.76 (0.011) | |
| Inters | MM[0, 1] | 10-9 | 16.79 (0.777) ± 5.51 (0.064) | 14.43 (0.799) ± 2.72 (0.065) | 15.19 (0.786) ± 2.53 (0.082) | 47.92 (0.434) ± 23.01 (0.180) | 34.01 (0.594) ± 8.89 (0.099) | 39.48 (0.429)± 9.67 (0.127) |
| MM[−1, 1] | 10-9 | 16.18 (0.770) ± 3.45 (0.071) | 14.57 (0.796) ± 2.85 (0.067) | 16.75 (0.765) ± 3.34 (0.078) | 44.49 (0.450) ± 19.78 (0.161) | 34.22 (0.589) ± 8.81 (0.094) | 37.96 (0.388) ± 11.41 (0.090) | |
| Mean | 10-9 | 17.62 (0.776) ± 8.06 (0.078) | 14.54 (0.797) ± 2.87 (0.068) | 15.15 (0.787) ± 2.48 (0.080) | 41.33 (0.486) ± 14.35 (0.147) | 34.04 (0.593) ± 8.93 (0.098) | 39.12 (0.438) ± 9.08 (0.130) | |
| ZS | 10 | 15.38 (0.779) ± 3.35 (0.080) | 15.29 (0.788) ± 3.18 (0.067) | 19.42 (0.654) ± 3.50 (0.073) | 42.61 (0.481) ± 12.71 (0.154) | 34.30 (0.584) ± 9.75 (0.095) | 39.86 (0.140) ± 12.56 (0.053) | |
| RS | 10-9 | 16.12 (0.739) ± 3.81 (0.110) | 15.35 (0.772) ± 3.37 (0.084) | 18.56 (0.695) ± 3.37 (0.070) | 47.21 (0.482) ± 15.43 (0.124) | 33.29 (0.599) ± 10.02 (0.081) | 40.00 (0.225) ± 12.17 (0.052) | |
| VS | 10 | 14.14 (0.798) ± 3.25 (0.089) | 14.25 (0.796) ± 2.35 (0.078) | 14.21 (0.798) ± 2.26 (0.082) | 39.03 (0.515) ± 12.48 (0.169) | 33.70 (0.587) ± 9.40 (0.085) | 33.21 (0.601) ± 9.35 (0.086) | |
| MLS | 10-9 | 14.53 (0.810) ± 2.70 (0.067) | 14.42 (0.799) ± 2.72 (0.065) | 15.19 (0.786) ± 2.53 (0.082) | 42.61 (0.520) ± 18.24 (0.138) | 34.01 (0.594) ± 8.89 (0.099) | 39.48 (0.429) ± 9.67 (0.127) | |
| DS | 6 | 15.57 (0.744) ± 2.98 (0.122) | 15.34 (0.765)± 2.76 (0.100) | 14.72 (0.774) ± 2.91 (0.094) | 37.21 (0.523) ± 9.74 (0.122) | 33.20 (0.592) ± 9.26 (0.097) | 33.14 (0.591) ± 9.35 (0.108) | |
| Med | 9-8 | 17.82 (0.740) ± 4.69 (0.097) | 15.051 (0.79) ± 2.17 (0.076) | 20.07 (0.602) ± 3.48 (0.072) | 43.86 (0.518) ± 22.05 (0.154) | 33.21 (0.610) ± 9.82 (0.081) | 39.62 (0.081) ± 12.72 (0.045) | |
| Tanh | 10 | 14.50 (0.802) ± 2.61 (0.064) | 15.19 (0.788) ± 3.17 (0.065) | 15.54 (0.792) ± 2.65 (0.061) | 33.07 (0.606) ± 9.43 (0.099) | 34.38 (0.585) ± 9.40 (0.094) | 33.57 (0.597) ± 9.42 (0.093) | |
| BW | 9 | 16.96 (0.757) ± 4.76 (0.079) | 16.00 (0.797) ± 3.19 (0.066) | 22.66 (0.401) ± 3.96 (0.043) | 44.02 (0.435) ± 15.34 (0.200) | 33.73 (0.587) ± 8.64 (0.114) | 39.56 (0.010) ± 12.99 (0.015) | |
| LI | 9-8 | 16.09 (0.770) ± 4.25 (0.099) | 14.99 (0.780)± 2.16 (0.088) | 22.46 (0.429) ± 3.96 (0.047) | 41.44 (0.469) ± 9.86 (0.079) | 33.92 (0.576) ± 10.47 (0.109) | 39.55 (0.038) ± 12.99 (0.019) | |
| Strategy | Normalization Method | Number of PCs | |||
|---|---|---|---|---|---|
| PCA-ANN | PCA-LS | PCA-SVR | |||
| Intras | MM[0, 1] | 10-9 | 65.68 (0.976) ± 3.36 (0.003) | 93.66 (0.948) ± 4.43 (0.006) | 67.34 (0.974) ± 2.04 (0.002) |
| MM[-1,1] | 10-9 | 66.15 (0.975) ± 2.39 (0.002) | 91.02 (0.951) ± 7.18 (0.007) | 76.20 (0.967) ± 3.06 (0.002) | |
| Mean | 10-9 | 66.37 (0.976) ± 3.60 (0.003) | 93.76 (0.948) ± 4.611 (0.006) | 67.40 (0.974) ± 1.92 (0.002) | |
| ZS | 10 | 67.35 (0.974) ± 2.90 (0.003) | 102.31 (0.936) ± 18.19 (0.024) | 163.65 (0.834) ± 7.49 (0.014) | |
| RS | 10-9 | 71.24 (0.971) ± 3.38 (0.003) | 102.71 (0.935) ± 19.12 (0.024) | 127.77 (0.904) ± 6.03 (0.009) | |
| VS | 10 | 78.23 (0.966) ± 3.67 (0.003) | 92.26 (0.949) ± 10.17 (0.012) | 99.00 (0.942) ± 13.17 (0.015) | |
| MLS | 10-9 | 71.57 (0.972) ± 5.05 (0.004) | 93.66 (0.948) ± 4.43 (0.006) | 67.36 (0.974) ± 2.04 (0.002) | |
| DS | 6 | 92.22 (0.952) ± 13.58 (0.011) | 118.30 (0.912) ± 24.58 (0.037) | 99.08 (0.940) ± 17.06 (0.019) | |
| Med | 9-8 | 116.90 (0.929) ± 11.55 (0.011) | 105.90 (0.931) ± 19.61 (0.028) | 204.91 (0.725) ± 4.80 (0.011) | |
| Tanh | 10 | 98.21 (0.942) ± 12.17 (0.015) | 102.53 (0.936) ± 15.51 (0.021) | 119.46 (0.919) ± 19.15 (0.026) | |
| BW | 9 | 67.36 (0.974) ± 3.99 (0.003) | 114.76 (0.93) ± 16.609 (0.021) | 270.02 (0.476) ± 5.38 (0.007) | |
| LI | 9-8 | 74.35 (0.969) ± 2.65 (0.001) | 97.69 (0.943) ± 11.852 (0.013) | 262.60 (0.513) ± 5.67 (0.011) | |
| Inters | MM[0, 1] | 10-9 | 93.94 (0.949) ± 24.97 (0.027) | 102.28 (0.952) ± 24.87 (0.024) | 101.99 (0.948) ± 38.26 (0.019) |
| MM[−1, 1] | 10-9 | 92.96 (0.949) ± 24.41 (0.035) | 110.95 (0.943) ± 36.74 (0.052) | 123.07 (0.928) ± 46.17 (0.029) | |
| Mean | 10-9 | 93.88 (0.949) ± 22.20 (0.030) | 110.01 (0.941) ± 36.95 (0.052) | 102.77 (0.946) ± 38.62 (0.022) | |
| ZS | 10 | 91.65 (0.949) ± 22.68 (0.027) | 97.48 (0.944) ± 26.36 (0.020) | 185.59 (0.798) ± 38.15 (0.043) | |
| RS | 10-9 | 104.01 (0.936) ± 30.59 (0.04) | 123.92 (0.914) ± 47.41 (0.067) | 164.64 (0.852) ± 40.75 (0.034) | |
| VS | 10 | 89.82 (0.952) ± 30.34 (0.024) | 97.09 (0.944)± 33.64 (0.036) | 106.37 (0.932) ± 48.24 (0.059) | |
| MLS | 10-9 | 95.37 (0.953) ± 25.75 (0.032) | 102.28 (0.952) ± 24.87 (0.024) | 101.99 (0.948) ± 38.26 (0.019) | |
| DS | 6 | 134.25 (0.888) ± 50.72 (0.082) | 140.46 (0.879) ± 49.44 (0.094) | 111.04 (0.912) ± 28.92 (0.060) | |
| Med | 9-8 | 151.27 (0.888) ± 44.57 (0.044) | 109.51 (0.925) ± 38.04 (0.069) | 209.15 (0.73) ± 33.75 (0.051) | |
| Tanh | 10 | 103.94 (0.942) ± 38.79 (0.032) | 98.25 (0.942) ± 28.44 (0.026) | 116.92 (0.931) ± 35.51 (0.039) | |
| BW | 9 | 93.64 (0.949) ± 20.28 (0.026) | 128.14 (0.954) ± 50.48 (0.023) | 264.46 (0.501) ± 30.29 (0.038) | |
| LI | 9-8 | 147.34 (0.922) ± 53.39 (0.053) | 101.09 (0.940) ± 28.65 (0.036) | 259.22 (0.529) ± 30.39 (0.040) | |
| Strategy | Activity | Method | |||
|---|---|---|---|---|---|
| Intras | Slow | PCA-ANN | 5.15 (0.975) | 11.17 (0.709) | 26.60 (0.996) |
| PCA-SVR | 7.40 (0.912) | 12.43 (0.681) | 29.03 (0.995) | ||
| PCA-LS | 6.92 (0.948) | 12.63 (0.669) | 68.49 (0.980) | ||
| Normal | PCA-ANN | 6.88 (0.946) | 24.84 (0.425) | 48.95 (0.988) | |
| PCA-SVR | 10.53 (0.941) | 21.12 (0.577) | 45.33 (0.989) | ||
| PCA-LS | 8.91 (0.911) | 23.61 (0.484) | 75.18 (0.973) | ||
| Inters | Slow | PCA-ANN | 3.42 (0.981) | 17.33 (0.701) | 33.68 (0.993) |
| PCA-SVR | 6.84 (0.941) | 16.07 (0.673) | 60.69 (0.981) | ||
| PCA-LS | 6.39 (0.930) | 15.15 (0.736) | 44.42 (0.994) | ||
| Normal | PCA-ANN | 15.29 (0.879) | 18.61 (0.889) | 44.42 (0.984) | |
| PCA-SVR | 18.87 (0.808) | 28.49 (0.691) | 64.23 (0.965) | ||
| PCA-LS | 17.54 (0.837) | 26.71 (0.727) | 66.23 (0.965) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kammoun, A.; Ravier, P.; Buttelli, O. Impact of PCA Pre-Normalization Methods on Ground Reaction Force Estimation Accuracy. Sensors 2024, 24, 1137. https://doi.org/10.3390/s24041137
Kammoun A, Ravier P, Buttelli O. Impact of PCA Pre-Normalization Methods on Ground Reaction Force Estimation Accuracy. Sensors. 2024; 24(4):1137. https://doi.org/10.3390/s24041137
Chicago/Turabian StyleKammoun, Amal, Philippe Ravier, and Olivier Buttelli. 2024. "Impact of PCA Pre-Normalization Methods on Ground Reaction Force Estimation Accuracy" Sensors 24, no. 4: 1137. https://doi.org/10.3390/s24041137