1. Introduction
Hollow wear constitutes the predominant degradation of tread on railway vehicle wheels, inducing a substantial impact on the vehicle’s steering precision and stability, especially once a critical limit of the wheel tread depth (typically ≲2.5–3.0 mm) is exceeded. This is due to the resultant significant lateral vibrations that may lead to adverse consequences such as passenger discomfort, damage in the neighboring rolling stock, degradation of the track infrastructure, or, in the worst case, to derailment [
1,
2,
3,
4,
5]. Therefore, the automated and prompt determination of the remaining useful mileage, or else the
remaining useful life estimation (RULE), of railway vehicle wheels with hollow wear, before the critical limit is reached, via on-board vibration response signals, is imperative. In addition, wheels RULE may play a vital role in the broader Condition-Based Maintenance (CBM) management of railway vehicles, as it may lead to enhanced comfort, safety and reliability of the vehicles, as well as to reduced maintenance cost and downtime.
In a broader context, vibration-based RULE technology has witnessed rapid advancements over the previous two decades, yielding a wealth of literature and applications at both component and system level [
6,
7,
8,
9,
10]. Vibration-based RULE is typically pursued via two main data-driven types of methods: a more commonly used one that addresses RULE as a
prediction problem, and another that treats it as a
multi-health state classification problem.
Despite the significant progress of vibration-based RULE, related applications for automated RULE in railway vehicle wheels using on-board measurements remain scarce [
11,
12,
13,
14], while the considered wheels possess severe faults in their treads, such as cracks and spalling. The methods of these studies fall under the category of the prediction-based RULE with the majority relying on statistical models, which incorporate a Wiener process model integrated with a linear, power-law, or exponential deterministic function according to the considered defect [
11,
12,
13], whereas only the study in [
14] utilizes an AI/ML model via the Neural Basis Expansion Analysis for Time Series (N-BEATS). The vibration signals RMS is employed as the selected feature for RULE in [
11,
12,
13], where statistical models are also employed and the obtained results indicate adequate agreement between the RMS evolution and the selected deterministic function representing wheel degradation. However, these studies explore quite severe wheel defects, as previously mentioned, implying RULE at the latest level of wheels’ lifetimes, while the RMS user selected threshold corresponding to the end-of-life is subjectively selected and may not always coincide with the actual failure event of the railway wheels, thus jeopardizing the vehicle’s safety.
On the other hand, RULE in [
14] is performed for a wide mileage range via the N–BEATS predictor and the use of the vibration signals variance after Box–Cox transformation as the selected feature. This transformation is employed to minimize time-varying effects on the vibration signals, with thousands of them to be used for the training (hyperparameters determination) of the N-BEATS predictor. In contrast to previous studies, the problem pertaining to the assumption that the wheel failure event occurs when the selected RULE feature exceeds a subjectively pre-specified threshold is acknowledged and addressed via multiple user-specified thresholds. The risk of inaccurate RULE is mitigated with this procedure, yet the risk for poor estimates still exists as the selection of these thresholds remains subjective. It is also worth mentioning that the methods in all the above studies use vibration measurements obtained from the vehicle axlebox, necessitating the frequent calibration and potential replacement of the employed sensors due to the extremely harsh operating conditions [
15].
An alternative method [
16] that has been recently introduced by the authors and collaborators tackles the RULE problem of hollow worn railway vehicle wheels as a multi-health state classification problem [
17,
18,
19,
20] demonstrating a promising performance. The method presents high sensitivity to the subtle effects of the hollow worn wheels on the vehicular dynamics, yielding from the fact that the Power Spectral Density obtained from acceleration signals on the vehicle bogie is employed as the main feature for the classification procedure, providing comprehensive information on the vehicular dynamics compared with static quantities such as the vibration signals RMS, the variance, and so on. However, the typical issue of the multi-health state classification methods pertaining to the classification of an unknown state into more than one relatively close health states has not been overcome.
The
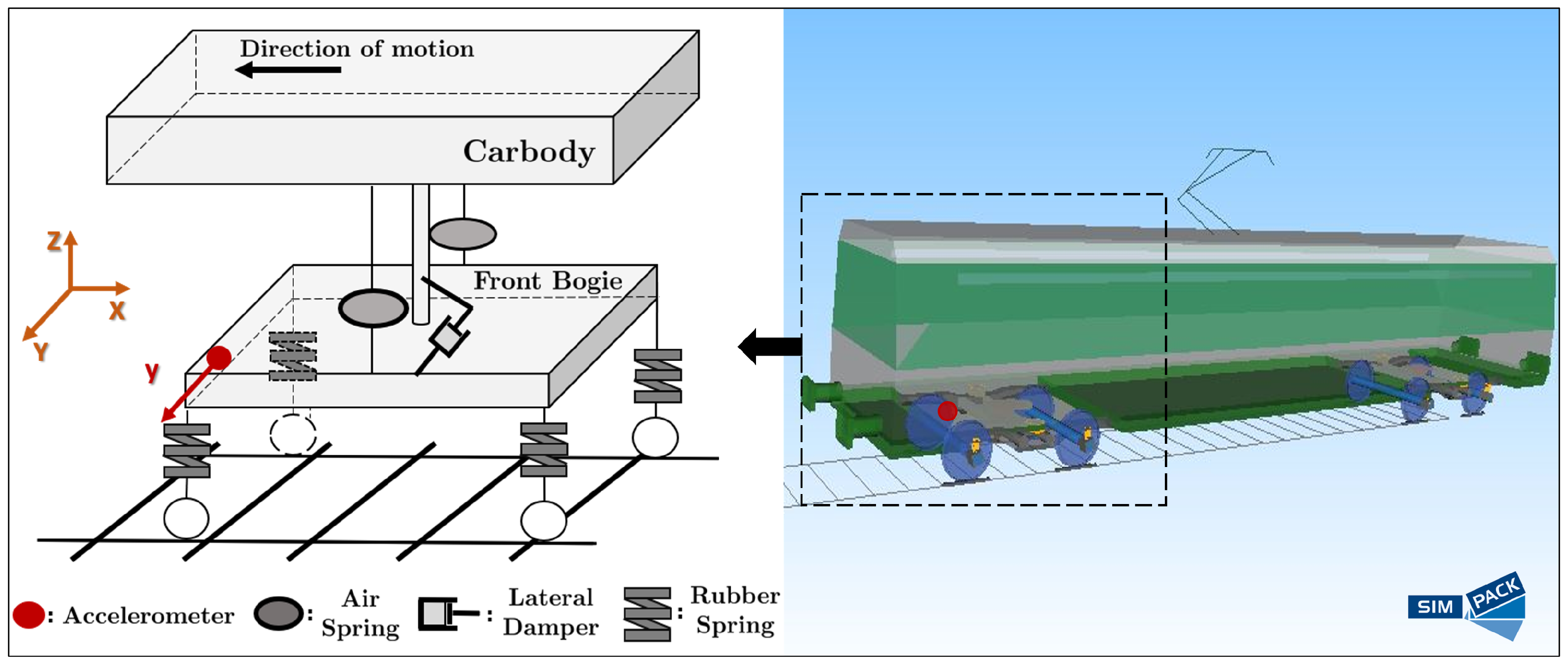
goal of this study is the introduction and assessment of a statistical time series method for automated remaining useful life estimation of hollow worn railway vehicle wheels via on-board precise tread depth estimation using lateral vibration signals from a single accelerometer on the bogie frame. The method is based on: (i) A Functionally Pooled AutoRegressive (FP–AR) model that belongs to the broader family of the advanced data-driven Functional Models [
21]. This model is employed for the representation of the partial vehicular dynamics for different hollow wear levels within a continuous tread depth range and until a critical limit, as well as for tread depth estimation through a proper optimization procedure; and (ii) a wheel tread depth evolution function with respect to the vehicle running mileage that interconnects the estimated tread depth (hollow wear) with the remaining useful mileage.
The FP–AR model is estimated in a
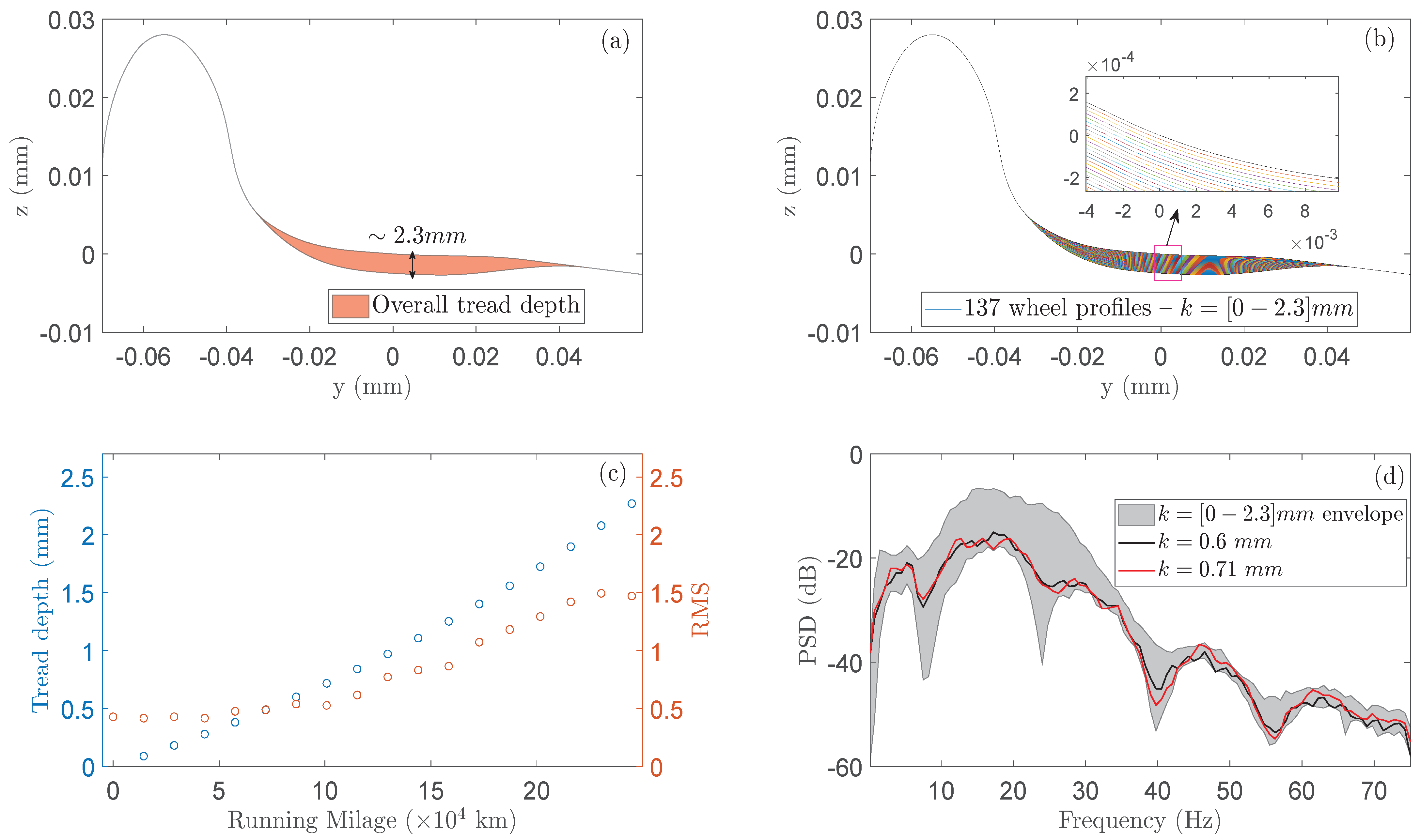
baseline (training) phase via a limited number of vibration signals obtained from a single accelerometer on the bogie of the traveling vehicle, for a sample of known wheels tread depths within the range of interest at the corresponding running mileage. The collection of the baseline phase signals and the associated tread depth values is carried out at known periodic running mileage intervals during an initial wheels re-profiling cycle (operational lifespan in terms of mileage) that ends when the tread depth approaches a critical limit (≤2.5 mm) and new wheel re-profiling is necessary [
4]. Once the initial re-profiling cycle has been completed, an evolution function that maps the tread depth to the running mileage is also constructed via conventional fitting approaches, using the available running mileage and the corresponding tread depth values. With the completion of these steps of the method’s training, it may operate continuously or on demand in real time (
inspection phase) for the RULE of wheels under unknown hollow wear using a fresh vibration signal that is driven through the FP–AR model for precise wheel tread depth estimation via Nonlinear Least Squares optimization. The obtained tread depth is then fed into the inverse evolution function and the remaining useful life of the hollow worn railway wheels in terms of remaining mileage is estimated.
Based on all the above, the novel contributions of the present study are summarized as follows:
The automated RULE of hollow worn railway wheels via their on-board tread depth estimation is for the first time achieved using a limited number of vibration signals for the training of the employed method, which are obtained from a single accelerometer located on the vehicle bogie avoiding thus the harsh environment of the axlebox area.
The on-board wheels tread depth estimation is based on the advanced modeling provided by the FP–AR model, which may account for the complete information—there is no need for predefined frequencies or other static quantities (e.g., RMS, kurtosis, etc.) with limited information—of the vehicle dynamics that is included in the vibration signals, leading thus to the precise (no gross classification) estimation of the wheels tread and thus their RULE. Based on this, the introduced method is characterized by high sensitivity to any subtle change to the wheels tread achieving so prompt RULE of hollow worn wheels, as it is the case of wheels with approximately zero tread depth.
The use of the wheel tread depth as the feature that leads to the estimation of their remaining mileage is a unique characteristic of the introduced method, due to the fact that the tread depth is the inherent quantity that characterizes hollow worn wheels, always with a monotonic pattern that facilitates prognostics. Additionally, tread depth provides valuable insight for maintenance as one of the most important wheels characteristics that determines their remaining useful life.
The postulated method is assessed via 566 Monte Carlo simulations using the well-known Simpack software 2019.1 [
22] for the development of a 42 degrees-of-freedom model representing an Attiko Metro S.A. railway vehicle running over a straight track with speed equal to 35 m/s. A single vibration signal is obtained from an accelerometer on the vehicle’s bogie in each simulation, while a wide range of railway wheel tread depths of hollow worn wheels is covered within the range
mm using actual measurements obtained from the Attiko Metro S.A. maintenance operator (Athens, Greece). In addition, the introduced method is compared with the multi-health state classification RULE method of [
16], which is based on multiple models for the representation of various hollow wear levels corresponding to distinct tread depth ranges. The selection of this recently introduced method is based on its promising results, which are presented in [
14], while it is also the only available vibration-based method that employs measurements of wheel tread depth for the estimation of their remaining mileage that will allow a fair comparison with the method presented in this study.
The rest of this article is organized as follows: The operating framework is presented in
Section 2. The Monte Carlo simulations via a Simpack-based railway vehicle model are presented in
Section 3, while the remaining useful life estimation method is presented in
Section 4. The performance assessment of the RULE method is presented in
Section 5, whereas the comparison with a multi-health state classification method for RULE in
Section 6. Finally, a discussion and the concluding remarks of the study are summarized in
Section 7.
4. The Remaining Useful Life Estimation Method
The RULE method of the present study is based on two core components: (i) a special form of data driven stochastic models,
the Functionally Pooled (FP) models [
21], which offer the capability of representing the vehicular dynamics for different depths of wheel tread in a continuous range of interest, and (ii) a
unique RULE concept incorporating on-board tread depth estimation through a proper FP model motivated by [
25] and the
mapping of the obtained estimate through a proper evolution function to a running mileage according to the wheel’s hollow wear, which does not necessarily coincide with the current mileage of the train speed meter. As also mentioned in
Section 2, the RULE method consists of a baseline (training) phase that is performed in an initial re-profiling cycle of the wheels using a number of
M vibration signals obtained from an accelerometer on the bogie frame, each one corresponding to a known running mileage
and tread depth
(
), as well as an inspection phase, which may run on-demand or continuously during the railway vehicle normal operation (online) based on acquired vibration signals from the vehicle traveling with wheels under unknown hollow wear (tread depth), for which the RULE should be achieved.
In particular, the modeling of the partial vehicular dynamics in
the baseline phase is performed through the estimation of a Functionally Pooled AutoRegressive (FP–AR) model of the form [
21]:
with
designating the AR order,
the model residual signal and NID
Normally Independently Distributed with the indicated mean and variance. The AR parameters
are modeled as explicit functions of tread depth
k using a
p-dimensional functional subspace spanned by the mutually independent functions
, while the constants
designate the corresponding AR projection coefficients. The FP–AR model identification is based on [
21]: (i) the determination of the FP–AR model order
and its functional subspace dimensionality
p for a given basis function family (any type of orthogonal polynomials such as Legendre or Chebyshev may be equivalently used) using a Genetic Algorithm (GA) for the minimization of the Bayesian Information Criterion (BIC); (ii) the model estimation based on Ordinary Least Squares (OLS) using “data pooling” for the
M available vibration signals (see also
Section 2) corresponding to the sample of known tread depths
within the range of interest
, where typically
; and (iii) the model validation via testing of the obtained model residual signals the whiteness (uncorrelatedness) hypothesis. Additionally, this phase includes the development of a tread depth
evolution function that interconnects the available tread depth samples with the corresponding mileage through typical curve fitting approaches. It should be noted that this function is similar with the one which, by exception, is formulated in this study, (
Section 3) for the generation of a significant volume of data due to the limited actual measurements, thus allowing the method’s statistical reliable assessment, yet this will not be the case in an actual application of the method.
In the
inspection phase, a vibration signal
(subscript
u stands for unknown) is acquired from the vehicle traveling in a new re-profiling cycle under potentially hollow worn wheels with unknown tread depth
k (also see
Section 2), and the railway wheels RULE method is activated through the following two steps:
- Step 1:
Given the estimated FP–AR(
)
model of the baseline phase,
is substituted in Equation (
1), the latter is solved with respect to
and based on this expression the estimation of the unknown
k (current tread depth) is achieved using the following Nonlinear Least Squares (NLS) estimator, which is implemented by golden search and parabolic interpolation [
25]:
with
designating the estimate and
the model residuals under an unknown tread depth. The obtained
is finally validated through typical hypothesis testing of
whiteness via the Pena–Rodriguez test statistic
D, which follows a standard normal distribution for a white sequence [
26]. The whiteness hypothesis is accepted
iff with
Z indicating a user selected threshold that is determined using typical normal distribution risk levels or heuristically based on the max absolute value of
D as obtained from the identified FP–AR model residual signals. The successful validation of the
estimate indicates that the current dynamics as obtained from the measured vibration signal
may be accurately represented by the FP–AR model of the baseline phase and the estimate
of the tread depth is accepted.
- Step 2:
Based on the tread depth evolution function of the baseline phase, the indicated hollow wear by
is matched with the corresponding running mileage
that leads to such a hollow wear which, as mentioned previously, may not necessarily be the same with the current mileage indicated by the train speed meter. Thus:
and wheels RULE in terms of wheels remaining mileage
estimation is readily obtained as:
with
indicating the running mileage corresponding to the selected critical limit of the tread depth
as defined in the baseline phase.
5. Performance Assessment of the Remaining Useful Life Estimation Method
Baseline (training) phase: The
acceleration signals from the initial re-profiling cycle, as obtained from the accelerometer on the vehicle bogie (also see
Table 2), with each one corresponding to a known tread depth
and running mileage
(
), are used for the identification of an FP–AR(62)
model with order
and functional subspace consisting of
Shifted Legendre polynomials; see estimation details in
Table 3). This model represents the partial lateral vehicular dynamics for any wheel tread depth lying within the continuous range of
mm. Furthermore, the samples of the actual tread depths and corresponding mileages (
Table 1) are used for the determination of the tread depth evolution function, which is of the exponential form (as made for
Section 3):
with all details given in
Table 3 (Baseline phase).
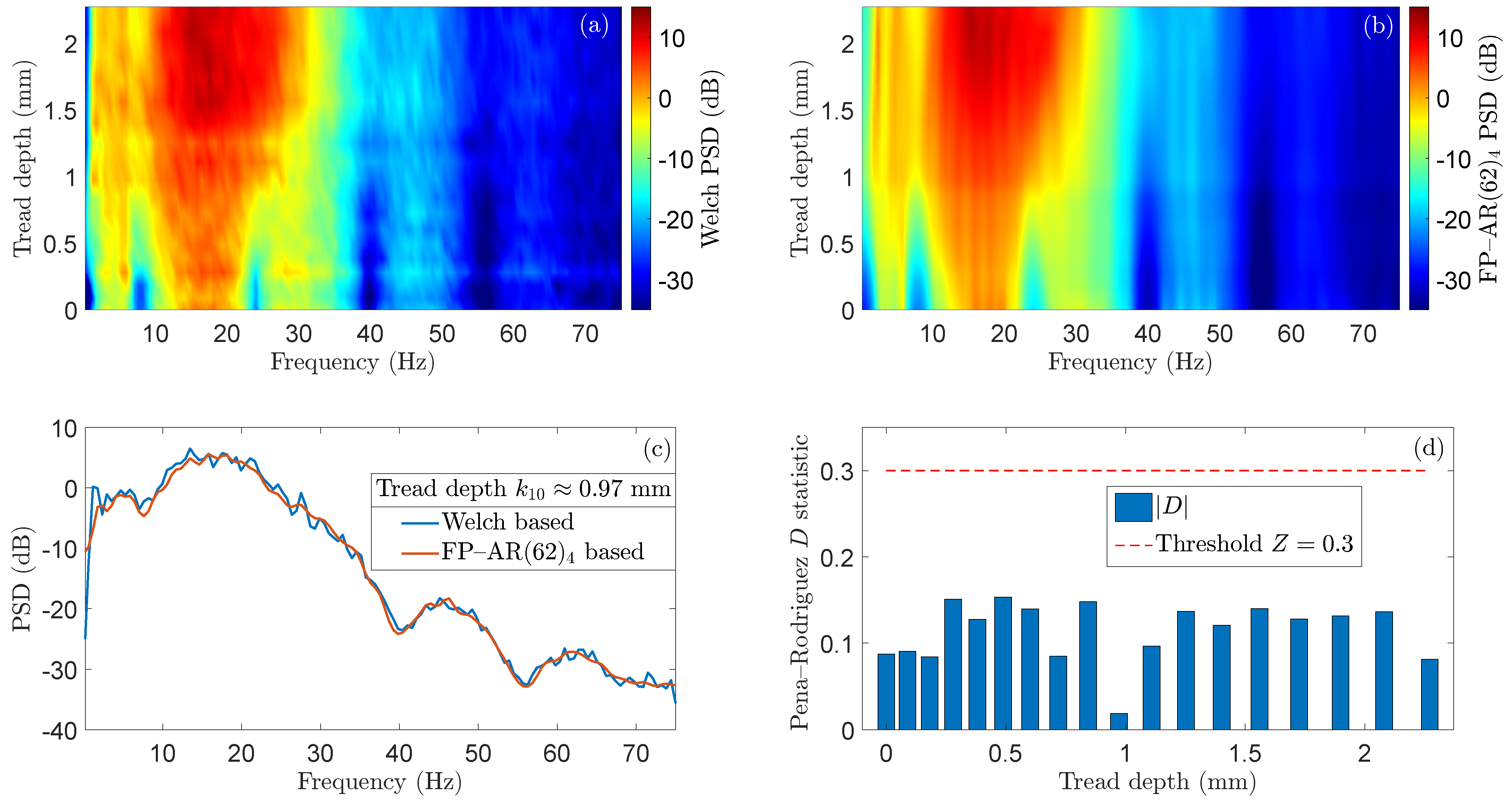
Figure 3a,b depicts the excellent agreement of the PSD with respect to the wheels tread depth as obtained by the FP–AR(62)
and its corresponding Welch-based counterpart, indicating the FP–AR model’s capability to represent the vehicle dynamics for varying tread depths with high accuracy.
Figure 3c includes a similar comparison for one indicative test case corresponding to a specific tread depth where the accurate modeling is also evident.
Figure 3d depicts the values of the
D statistic as obtained from the Pena–Rodriguez whiteness test based on the 18 model residual (error) signals as they are obtained from the estimated FP–AR (62)
model, as well as the threshold
which is heuristically selected to be almost two times higher than the maximum absolute value of
D.
Inspection (online) phase: The 4 signal sets of
Table 2 that lead to the 548 test cases with hollow worn wheels are used in this phase for the method’s RULE performance assessment. It is worth noting that in all these test cases the wheels wear (tread depth) is unknown and their remaining useful mileage should be estimated. The available vibration acceleration signal from each test case is driven through the FP–AR(62)
model and the wheels tread depth
along with the remaining mileage
are estimated via Equations (
2) and (
4), respectively.
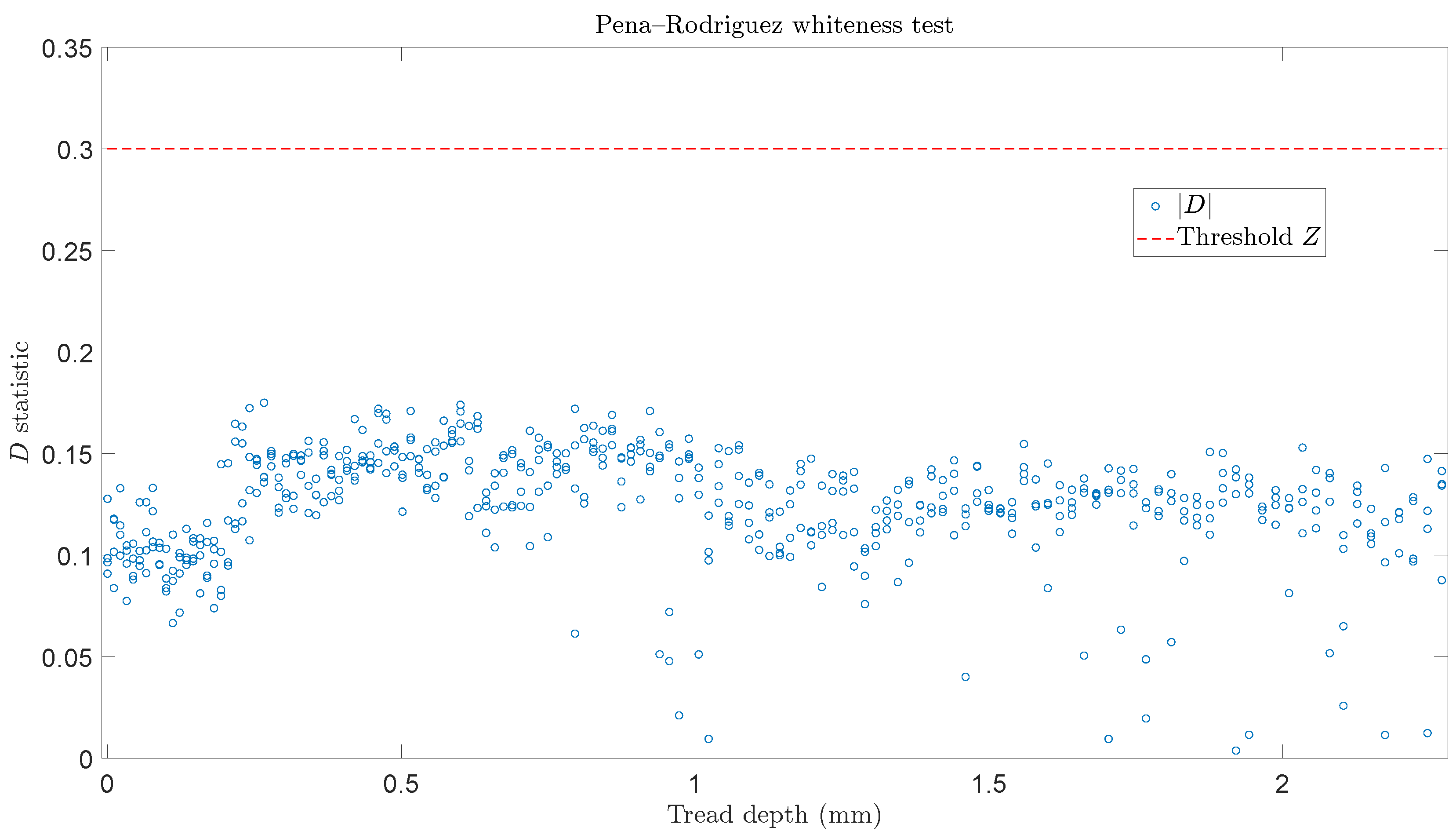
Figure 4 depicts the scatter plot of the method’s
D statistical values for all considered tread depths corresponding to the 548 signals of the inspection phase, as well as the threshold of
D (
) as selected in the baseline phase. As is evident, all
D values are under the threshold indicating that all tread depth estimates through the FP–AR(62)
model are valid, and may be used in the evolution function for the wheels remaining useful mileage estimation. The remarkably low estimation mean errors of wheel tread depths for each signal set are presented in
Table 4, indicating the precise on-board estimation of wheels wear based on the employed FP–AR model.
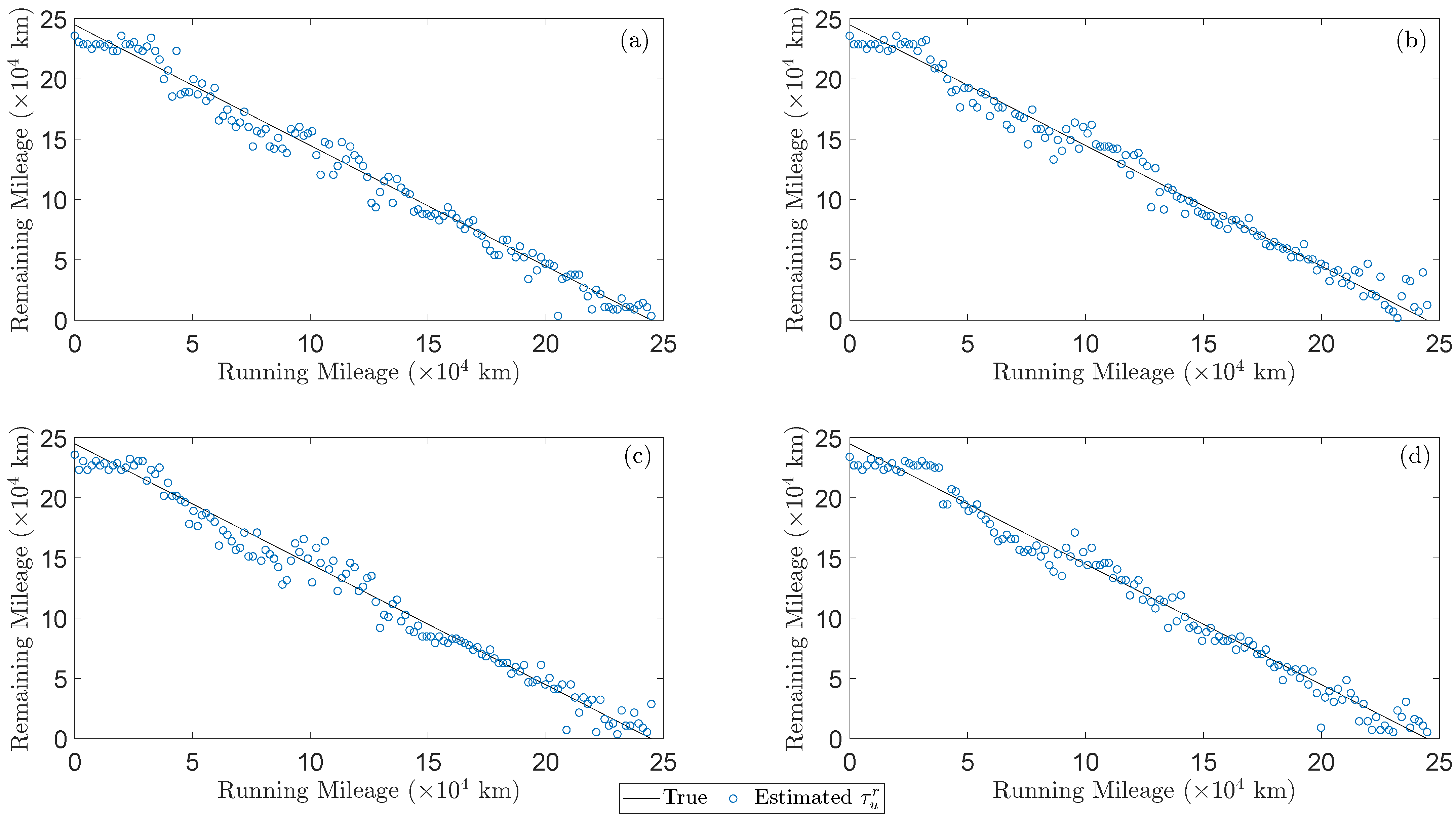
Once the precise estimates of the wheels tread depths that are under unknown hollow wear are validated, their remaining mileage is obtained using the inverse evolution function, which is shown in
Table 3 (see inspection phase), and the results for the 548 test cases are presented in
Figure 5. In particular, each subplot includes the remaining mileage estimates (blue circles) as obtained by the method based on the signals from one of the four considered signal sets corresponding to 137 distinct tread depths (see
Table 2) along with the actual values (black line). As it is evident, the method is capable of estimating accurately the wheels remaining useful life from the beginning of the vehicle operation (re-profiling cycle), which is also confirmed by the the Mean Absolute Error (MAE) that is presented in
Table 4 per signal set.
6. Comparison with a Multi-Health State Classification Method for RULE
The comparison of the postulated method with a multi-health state classification-based RULE method, which is based on multiple, conventional, AutoRegressive models (MM–AR), is presented in this section. A non–parametric variant of this method with very promising results has been recently presented by the authors and collaborators of [
16].
For a fair comparison, the railway wheels HW for all considered re-profiling cycles is divided into 7 distinct “health states” associated with specific railway wheel tread depth ranges and remaining mileage intervals as shown in
Table 5. Based on these, the comparison between the two methods is performed according to their capability to correctly classify the unknown tread depths to the specific health states, which as mentioned in the introduction corresponds to a gross and not precise RULE.
There is no new training procedure for the FP–AR-based method, while the same AR order (
) is adopted for the MM–AR-based method. However, the latter needs 56 signals (8 acceleration signals per health state) from the initial re-profiling cycle for its training, in contrast to the FP–AR, which is trained with
vibration signals. Thus, both methods’ assessment is performed in this section using 510 vibration signals. The parameter vectors of the multiple AR models is the feature that is employed by the MM–AR-based method for RULE, which is achieved through multi-health state classification. The decision mechanism is based on the Mahalanobis distance between the available baseline phase model parameter vectors (8 per health state) and is obtained from a single AR model of the same order estimated in the inspection phase for each of the considered 510 test cases. On the other hand, there is no decision making mechanism for the FP–AR-based method and just the estimated remaining mileage
is classified into one of the remaining mileage ranges (
Table 5) and thus to the corresponding wheels health state.
An S-fold cross validation procedure ([
27] p. 33) is adopted for the methods’ thorough assessment and fair comparison including “rotation” of the signals, which are used in the baseline phase for the training of the methods. In particular, four rotations are performed per method, leading thus to a total of 2040 (
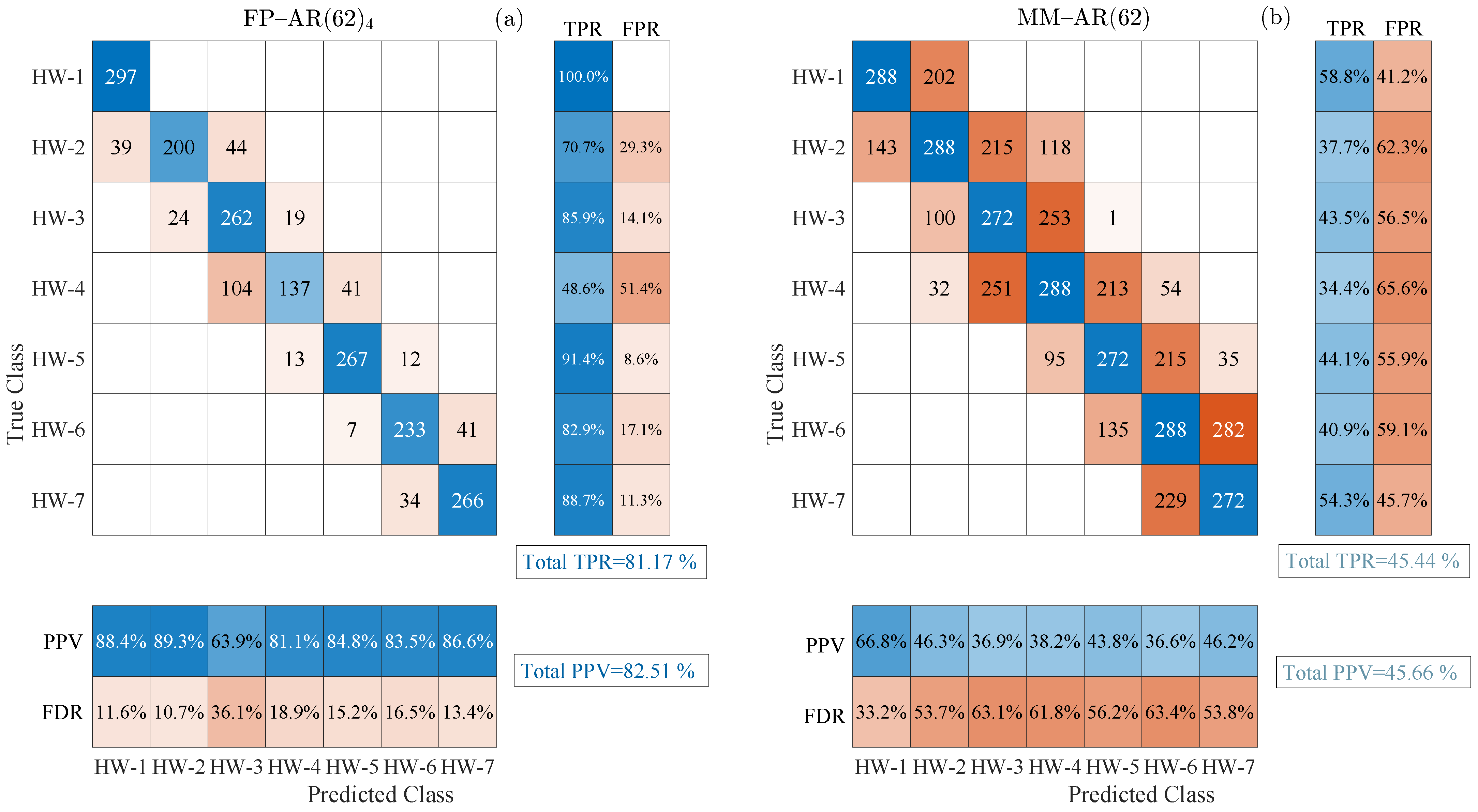
) inspection cases. The classification-based RULE results for both methods are presented via confusion matrices [
28] in
Figure 6. The FP–AR-based method achieves much higher correct classification percentages in all considered inspection cases than the MM–AR-based method, although it is not designed for such type of operation.
In each confusion matrix, the blue colored diagonal and the red colored off-diagonal cells correspond to the number of correctly and incorrectly classified inspection cases, respectively. The row summaries on the right of each matrix indicate the percentages of correctly (True Positive Rate or TPR) and incorrectly (False Positive Rate or FPR) classified inspection cases per true health state with blue and red tint, respectively [
28]. On the other hand, column summaries at the bottom of each display the Positive Predictive Values (also referred to as PPV or precision) and False Discovery Rates (also known as FDR or 1 − precision) per predicted health state using the same color code as previously [
28].
The overall percentages of the correctly classified inspection cases (True Positive Rate) and Positive Predictive Values (precision) are summarized in
Table 6. Based on these, the superiority of the proposed method, even if it is used as classification-based RULE is evident reaching an overall
true positive rate and
precision, while the performance of the MM–AR-based method is poor achieving
and
, respectively.
7. Conclusions and Discussion
The problem of automated remaining useful life estimation (RULE) of hollow worn railway vehicle wheels via on-board precise wheel tread depth estimation using lateral vibration signals from a single accelerometer on the bogie frame has been addressed has been, for the first time, addressed in this study, based on a a statistical time series method. This is a problem of high importance, as hollow worn wheels lead to significant lateral vibrations of the vehicle, and the prompt determination of their remaining useful mileage (or else the RULE), before the critical limit is surpassed, may reduce maintenance cost and enhance passenger comfort and safety.
The introduced method is founded on two main components: (a) an FP–AR model for the vehicular dynamics representation and wheels precise tread estimation, and (b) a wheel tread depth evolution function interconnecting the estimated tread depth (hollow wear) with the corresponding remaining mileage. In particular, an FP–AR(62) model for the representation of the vehicular dynamics within the continuous tread depth range mm and an exponential function for the tread depth evolution with respect to the vehicle running mileage have been employed. The training of the method has been based on a limited number of 18 acceleration signals from an initial wheel re-profiling cycle, while its performance has been assessed using vibration signals from four more, distinct, re-profiling cycles that led to 548 inspection test cases with hollow worn wheels. Furthermore, a comparison with an MM–AR-based method in a multi-health state classification framework for RULE has been performed based on 2040 inspection cases.
Based on the results of
Section 5, as well as the pertinent state of the art on the topic that is presented in
Section 1, the main lessons learned from the study are concisely summarized and discussed below:
- (i)
A key advantage of the proposed method is the fact that the wheel RULE is achieved using a very special feature, the wheel tread depth which, unlike with the statistical models—which rely on static quantities such as the RMS, kurtosis and thus on exploiting limited information of the vehicle dynamics—is the characteristic that describes exactly the considered hollow wear, and is precisely estimated through the FP–AR model using the full information included in the vibration signals. Another advantage of the introduced method is that its training requires only a limited number of on-board vibration signals (18 are used in this study) from a single re-profiling cycle, compared to the AI/ML model-based methods that typically require a significant number of vibration signals from multiple run-to-failure experiments. Regarding the multi-class classification methods, the advantage of the new method is its capability to provide precise RULE instead of rough classification.
- (ii)
Other general advantages of the introduced method that may be mentioned are: (a) Its capability to operate with just a single accelerometer placed on the vehicle’s bogie frame that effectively circumvents the problem of frequent calibration or even replacement of sensors which are commonly installed to the axlebox area with highly harsh and noisy conditions. (b) It offers simplicity as its training includes the relatively simple identification of an FP–AR model and the determination of the evolution function, while its operation in real time requires a simple optimization procedure and the validation of the tread estimate that directly leads to the wheels useful mileage through the evolution function. (c) The estimation of the wheel tread depth provides valuable insight about the evolution of the hollow wear over the running mileage and conditions such as abrupt and long braking, imbalanced payload, and so on.
- (iii)
The RULE results of the method’s assessment based on the four sets of signals from the corresponding re-profiling cycles in the inspection phase indicated high accuracy in tread depth estimation from very early stages of hollow wear with the maximum mean absolute error to be mm (based on Set 3), while the remaining mileage maximum mean error of 8170 km corresponds to the of the total mileage.
- (iv)
The results from the comparison with a multi-health state classification MM–AR-based method, involving 2040 inspection test cases, revealed the superior performance of the introduced method, although it is not designed to operate in such a classification framework. It achieved an overall True Positive Rate of and precision of for the considered health states, with its competitor to demonstrate poor performance with an overall True Positive Rate of and precision of .
Despite its various advantages, the main limitations of the study include the requirement of known samples of tread depths at corresponding mileage for a complete re-profiling cycle, and the potential decrease on the method’s accuracy for applications where the pattern of the evolution function significantly alters in different life cycles, yet this is not expected for railway vehicle wheels.
However, future work includes further exploration of the method’s performance using solely experimental data, a second accelerometer, as well as varying operating conditions such as different payload. Furthermore, the case of a varying pattern evolution function in subsequent re-profiling cycles along with the potential use of additional wheels critical dimensions (i.e., flange gradient, thickness, height) will be also investigated in order to extend and solidify the method as a valuable tool of high precision and simplicity for railway vehicle predictive maintenance.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}