



Moving-Principal-Component-Analysis-Based Structural Damage Detection for Highway Bridges in Operational Environments

Abstract
:1. Introduction
2. Theory
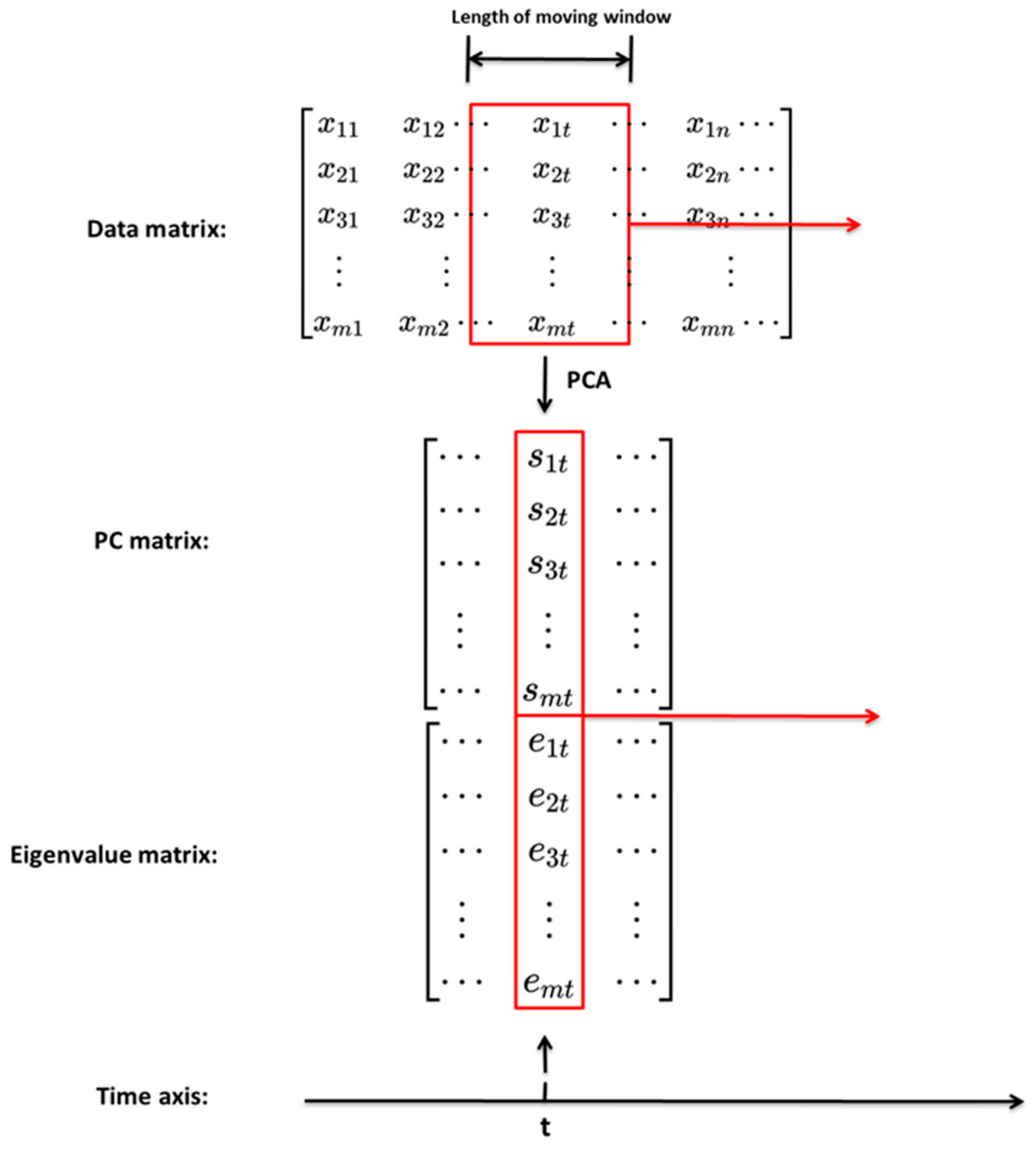
2.1. Principal Component Analysis (PCA)
2.2. Moving Principal Component Analysis (MPCA)
3. Numerical Study
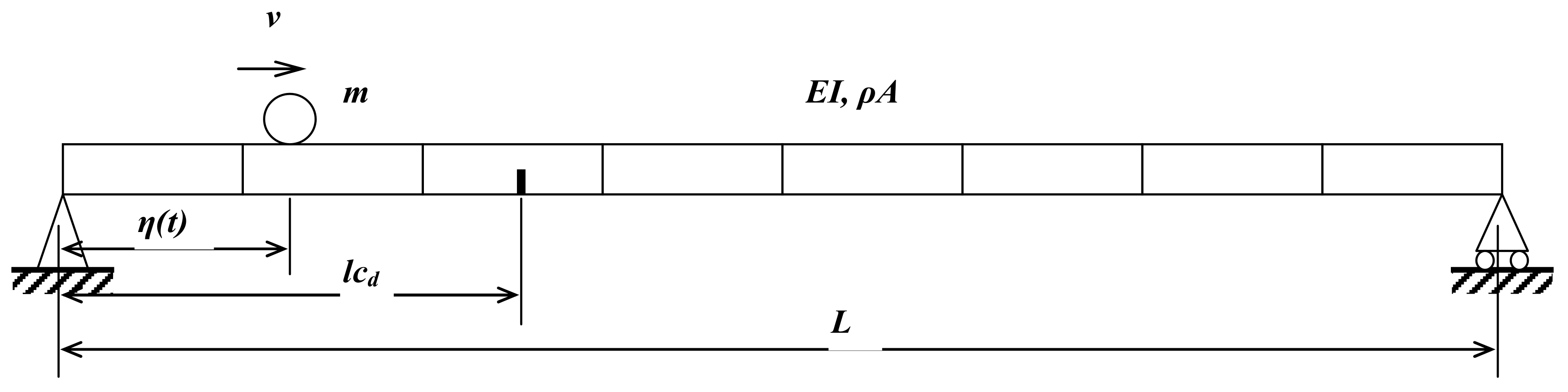
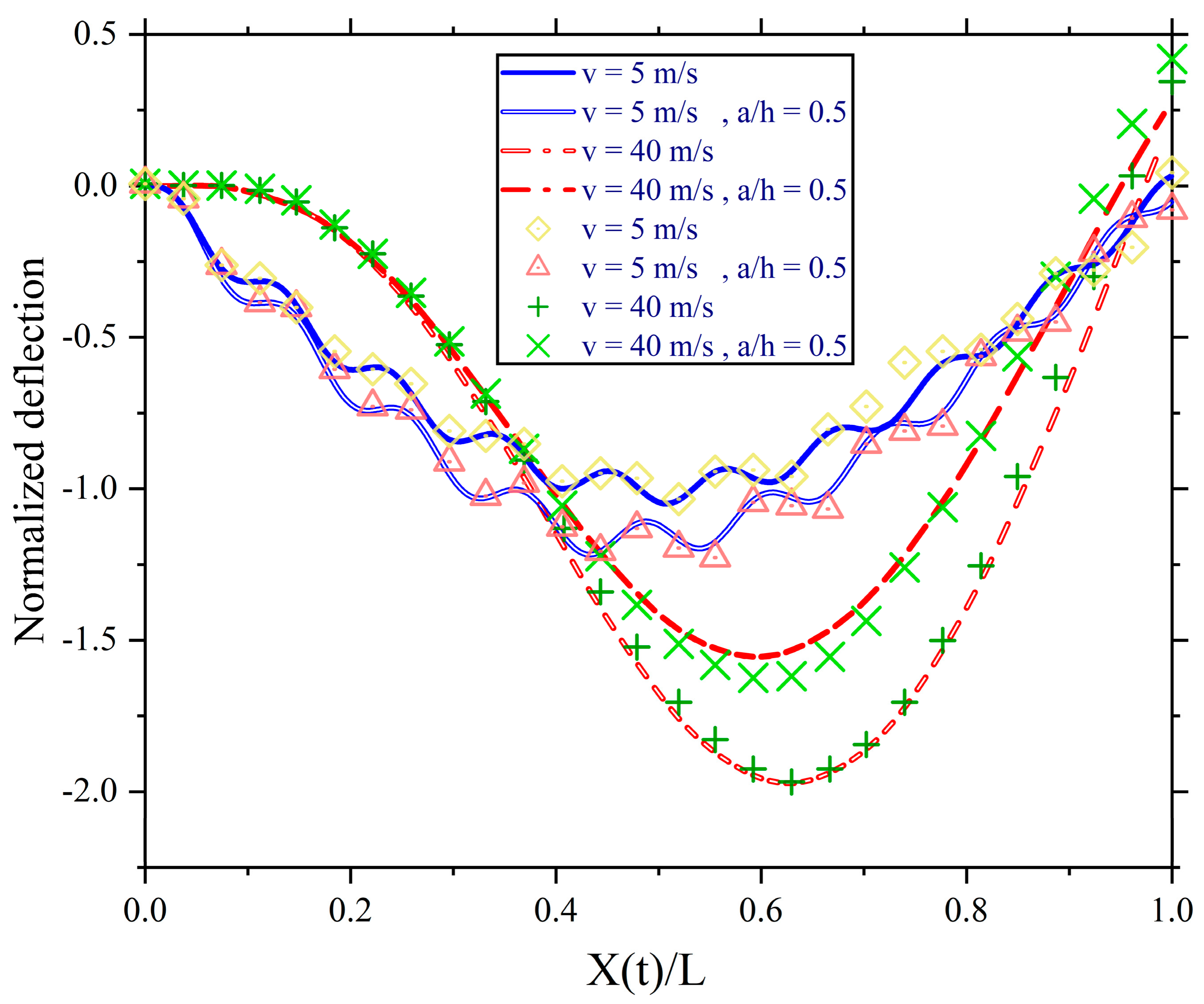
3.1. Vehicle–Bridge Interaction Model
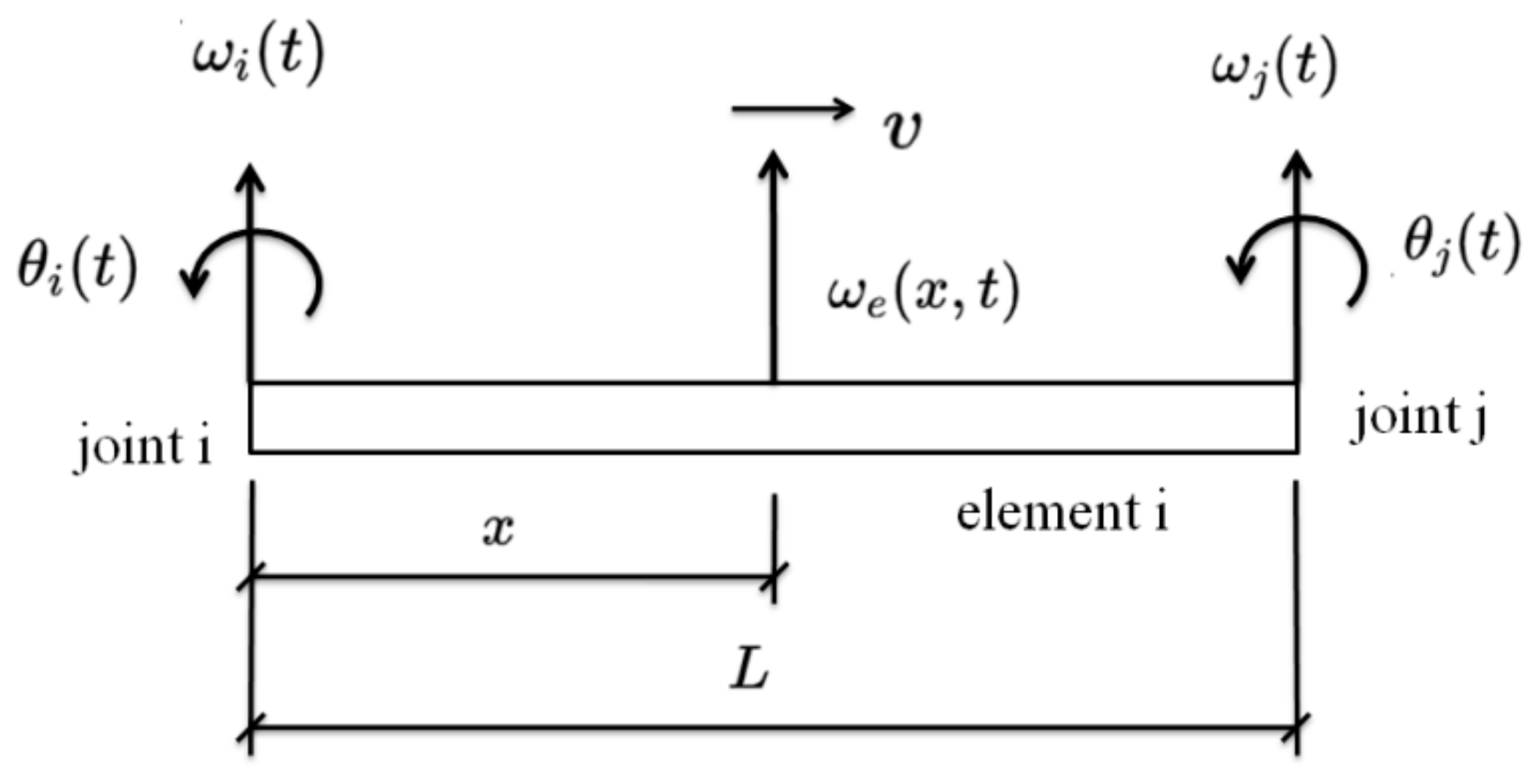
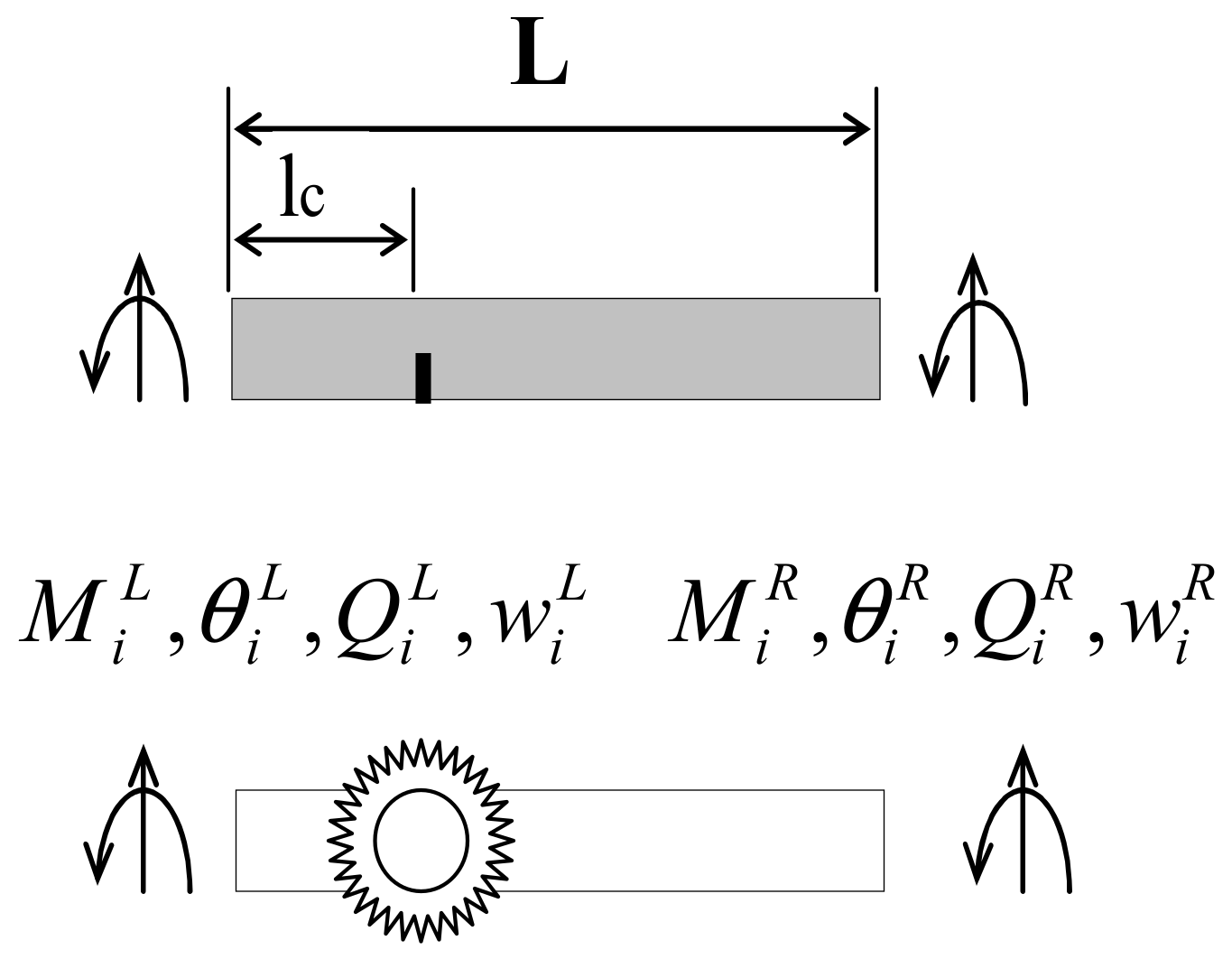
3.1.1. Finite Element Model of a Beam Bridge
3.1.2. Equation to Calculate the Motion of the Bridge Subjected to a Moving Vehicle
3.1.3. Temperature Influence
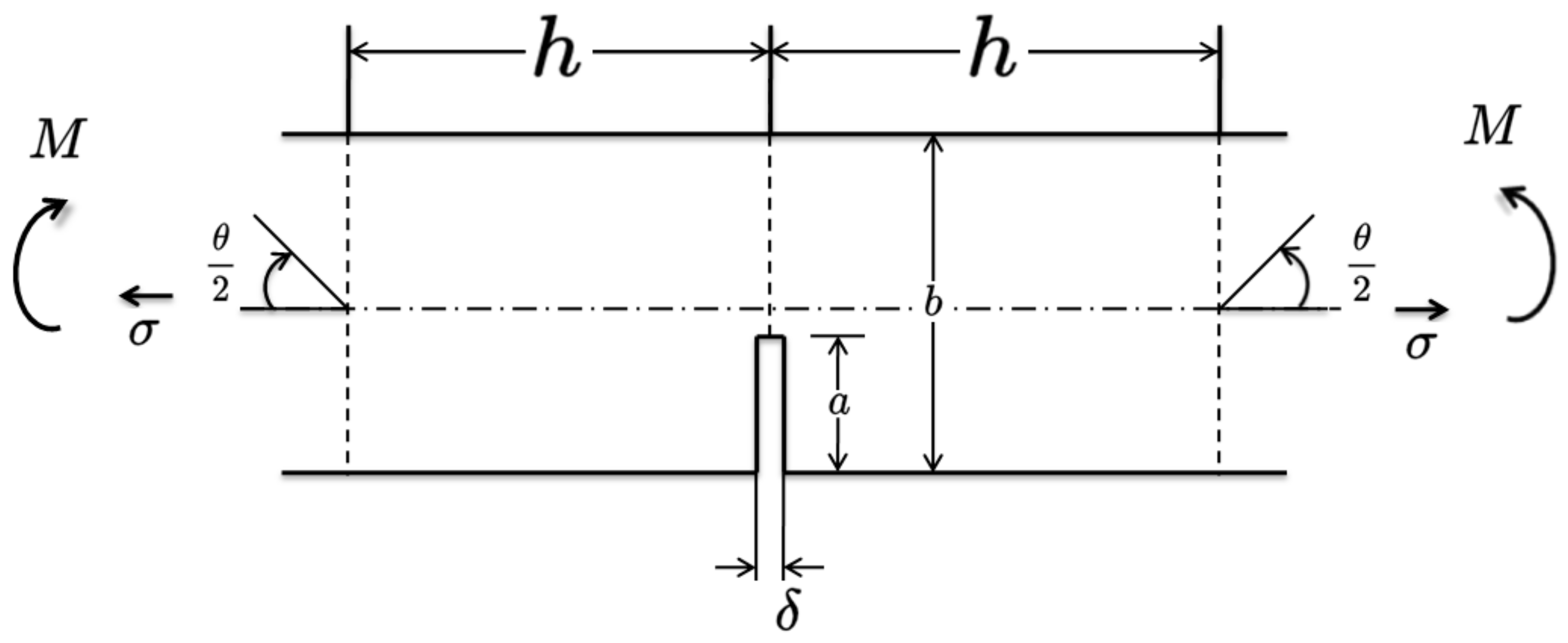
3.1.4. Crack Damage Model
3.2. Results and Discussions
3.2.1. Numerical Simulation
3.2.2. Comparison of Results Obtained Using PCA and MPCA
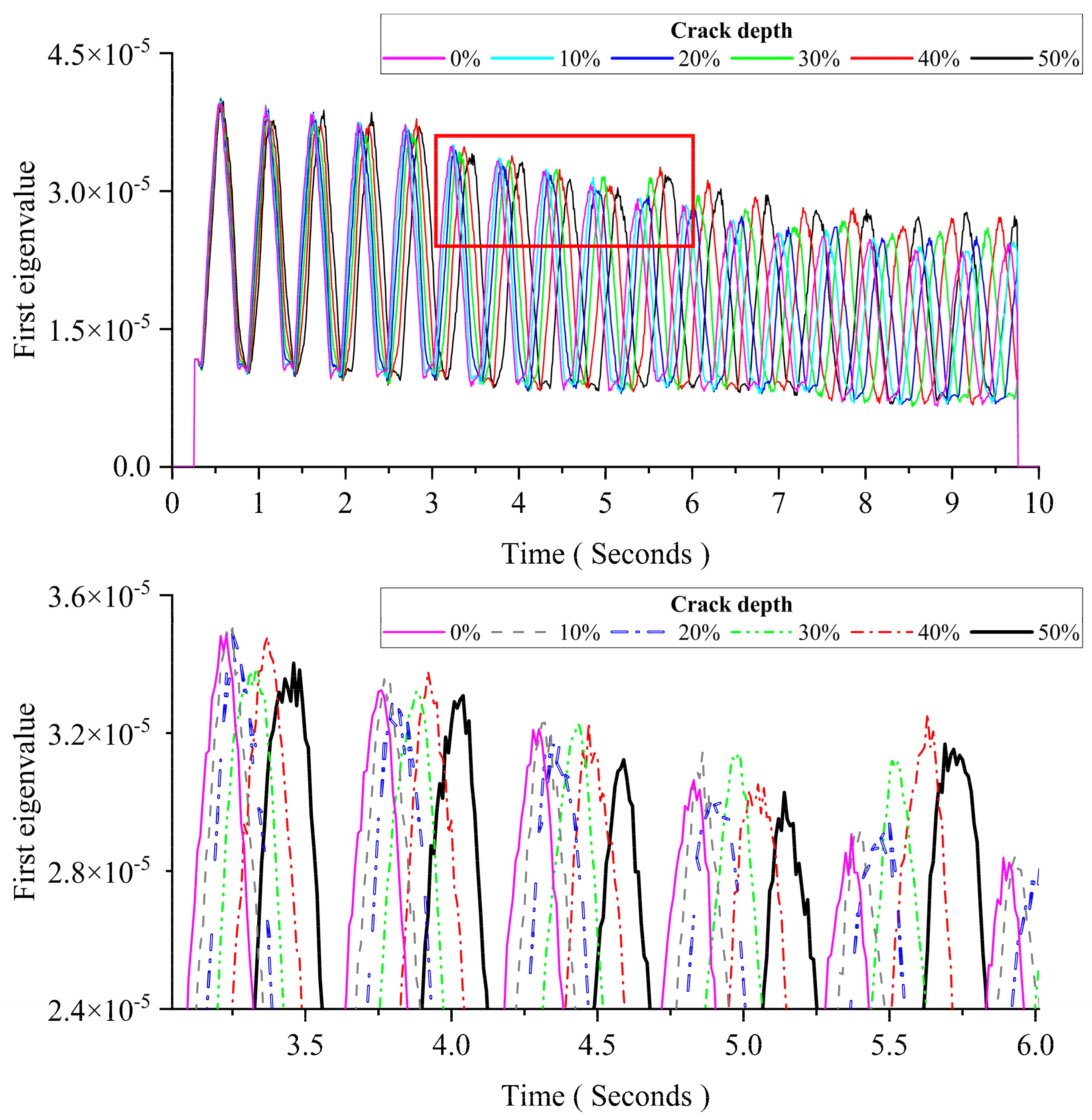
3.2.3. The Effect of Damage Patterns
3.2.4. Orthogonality
3.2.5. Temperature Influence
3.3. Damage-Sensitive Features
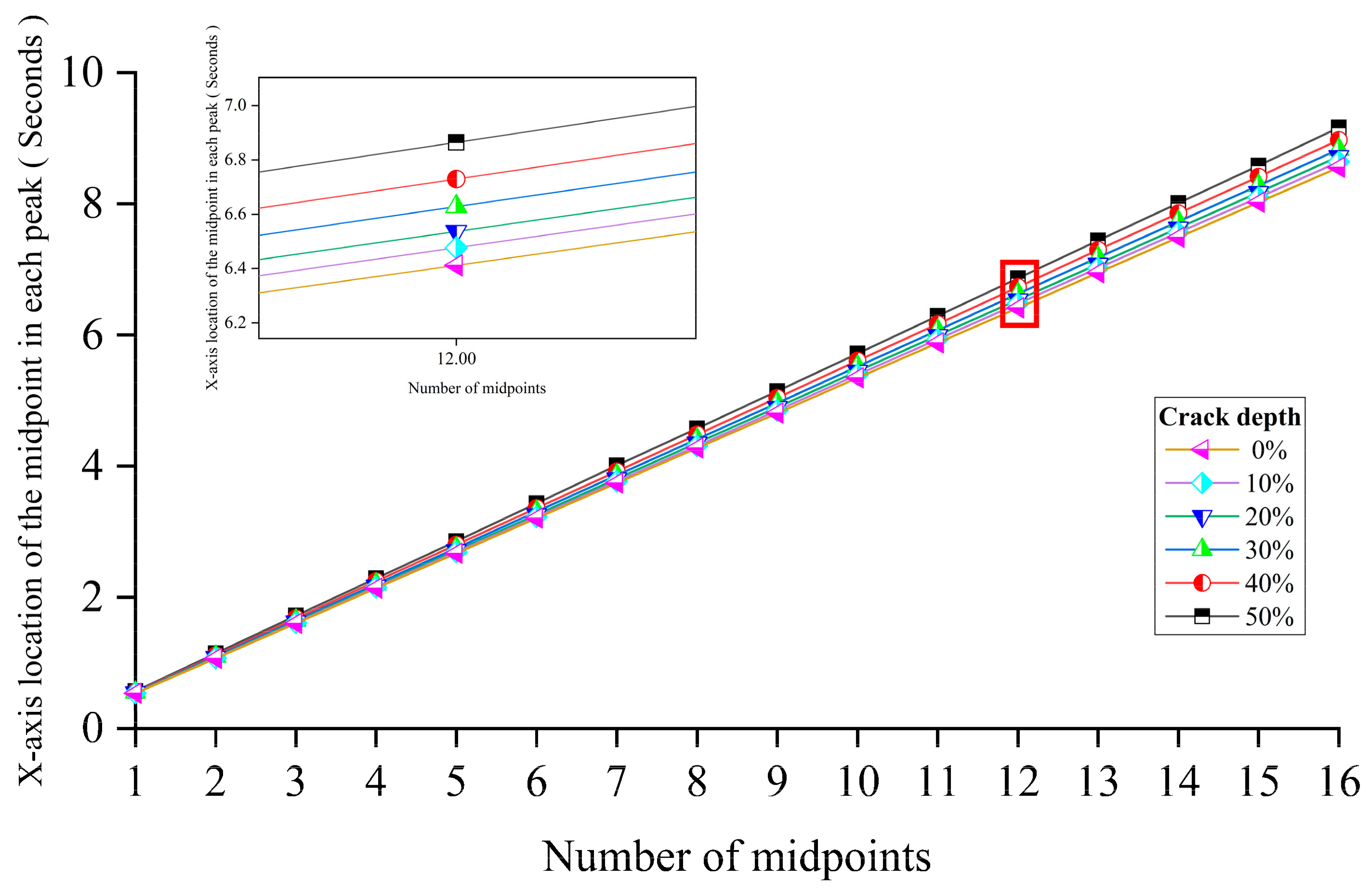
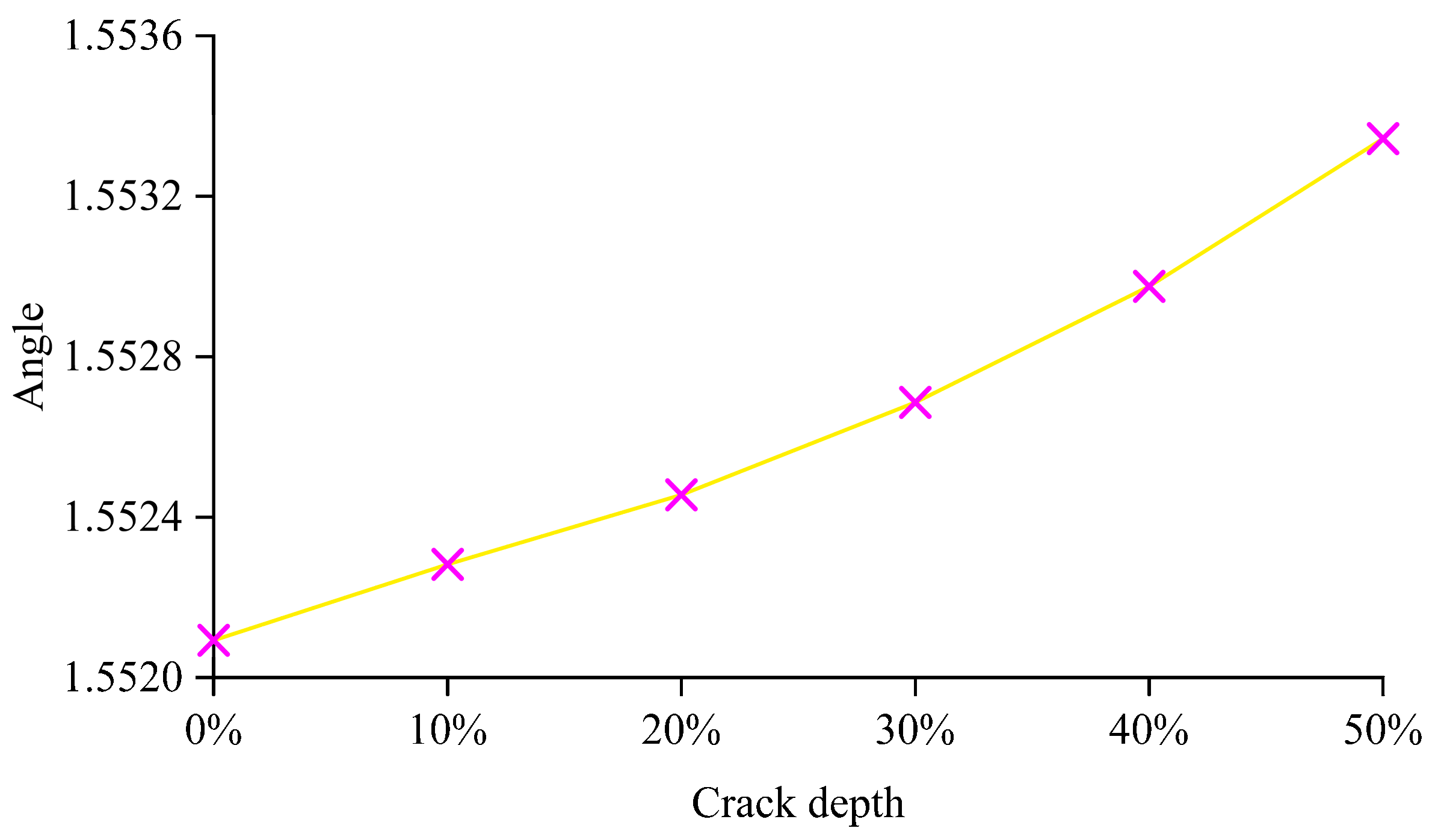
3.3.1. Observation
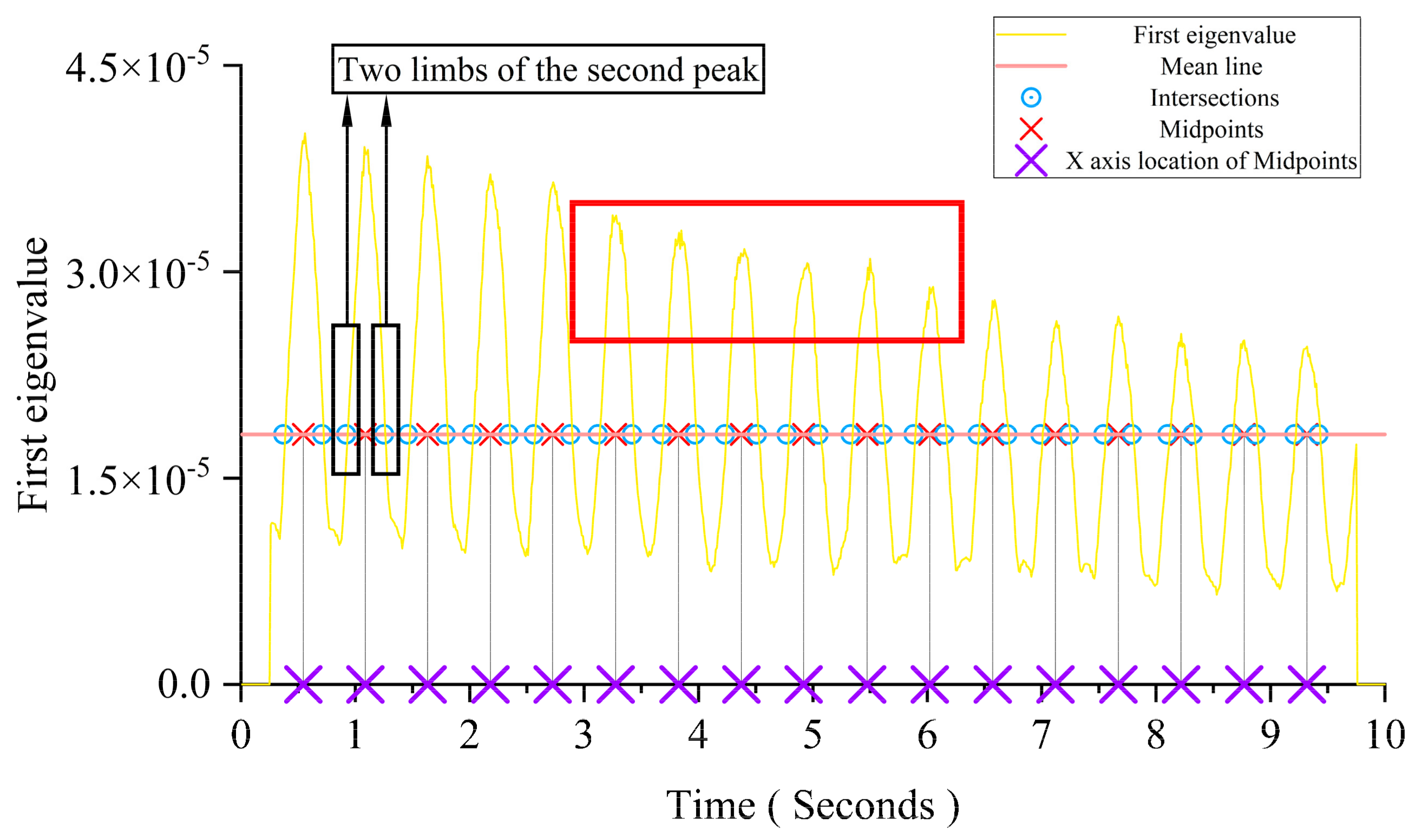
3.3.2. Construction
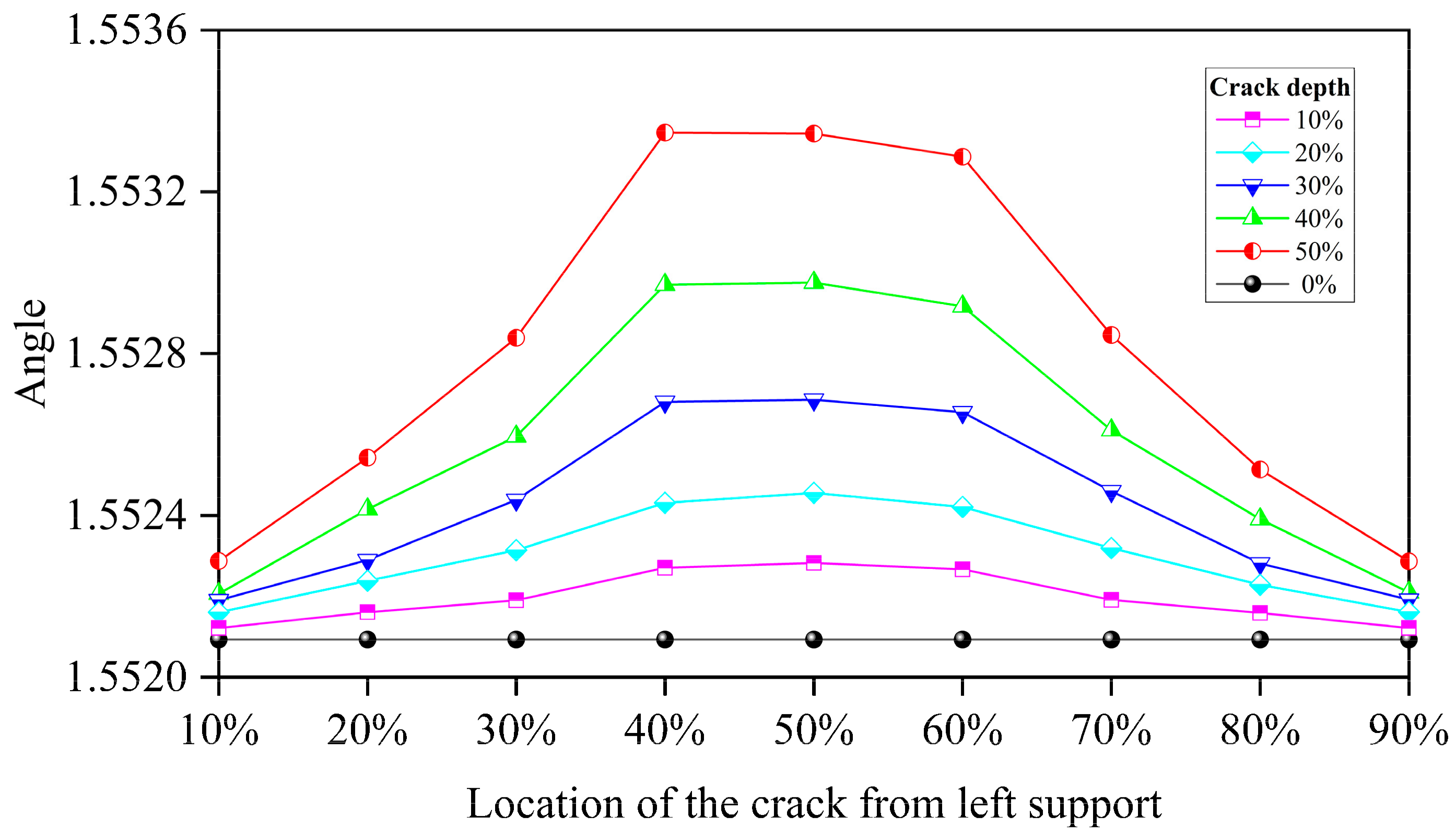
3.3.3. Influence of the Crack’s Location
4. Experimental Investigation
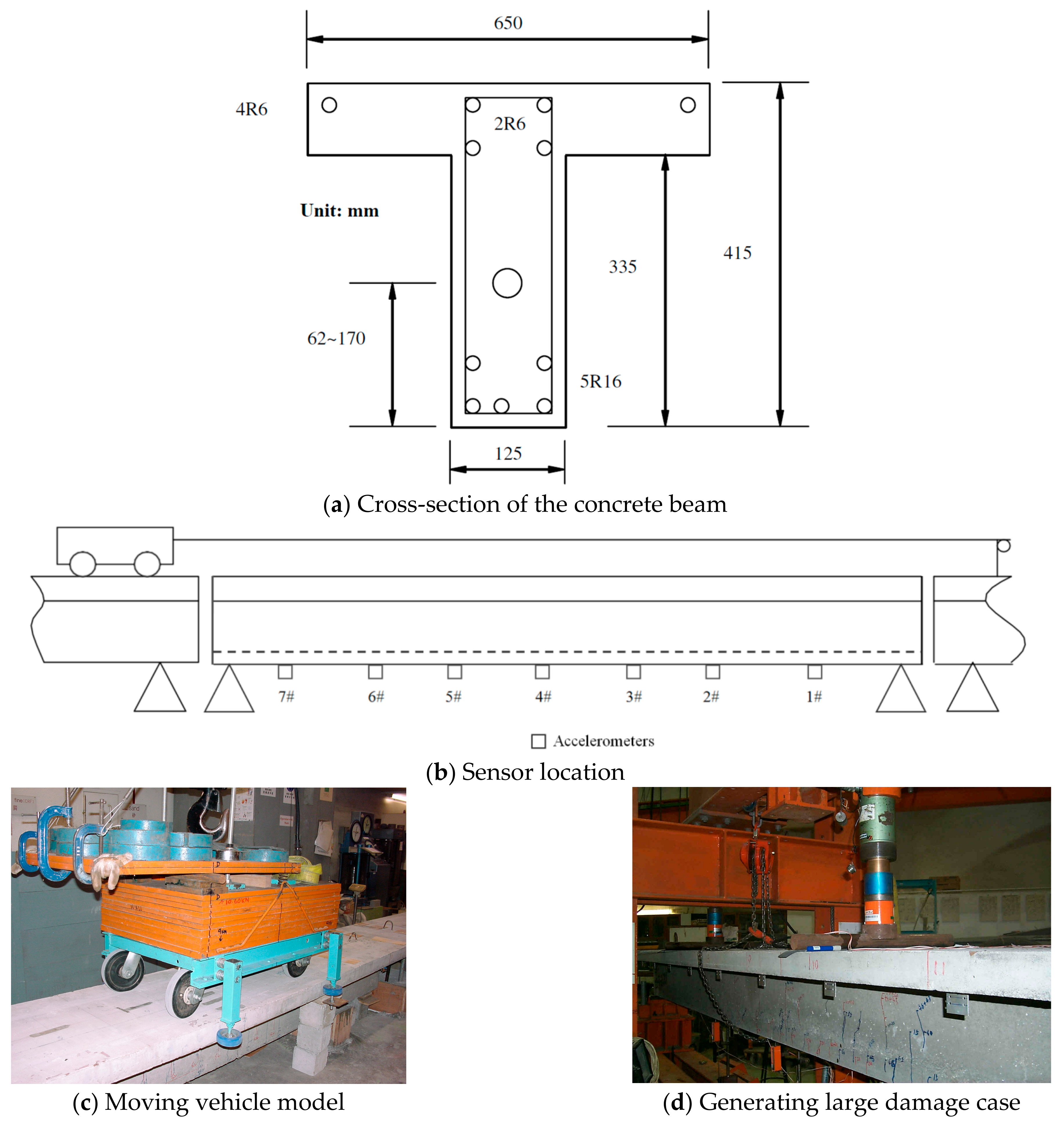
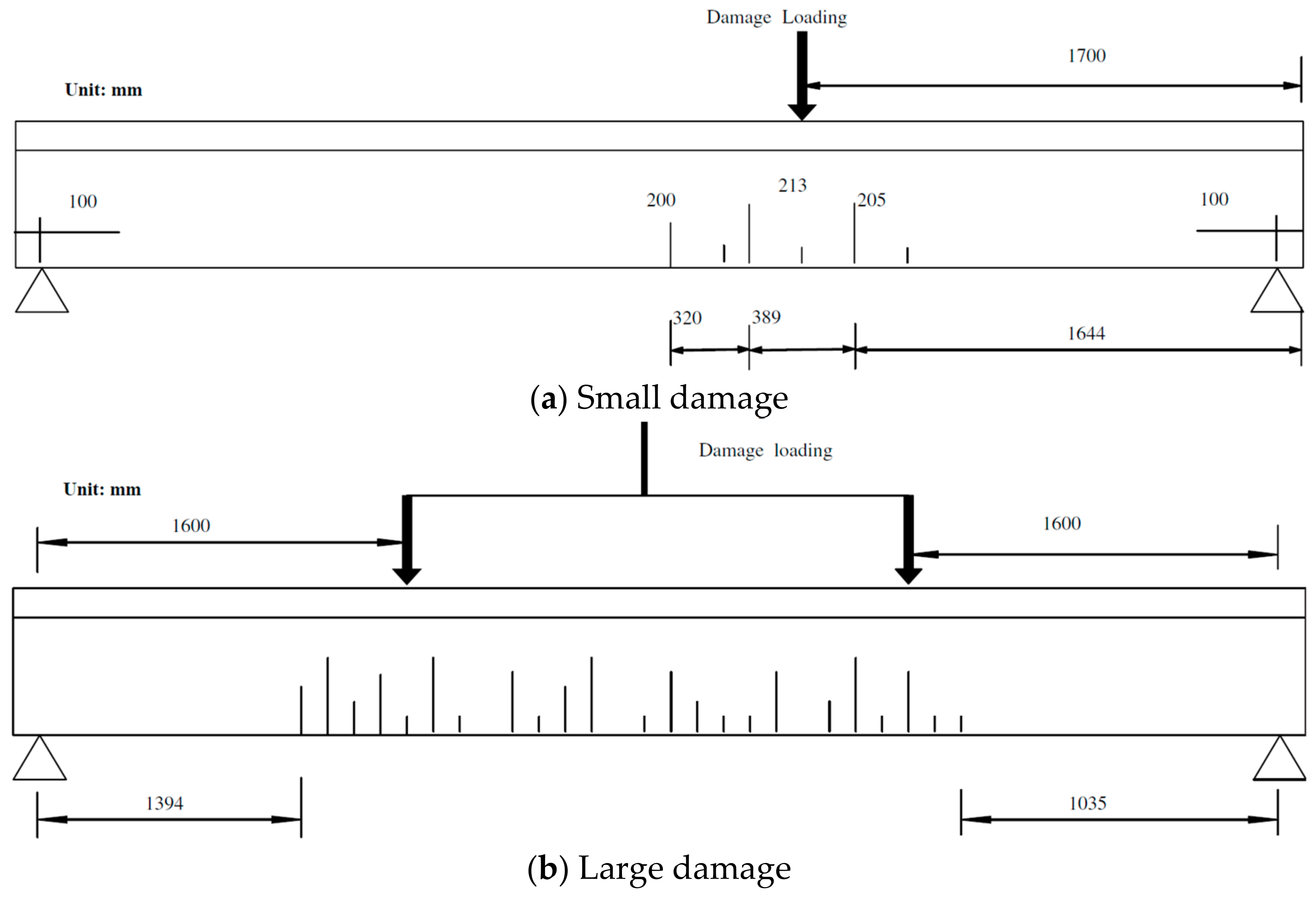
4.1. Experimental Setup
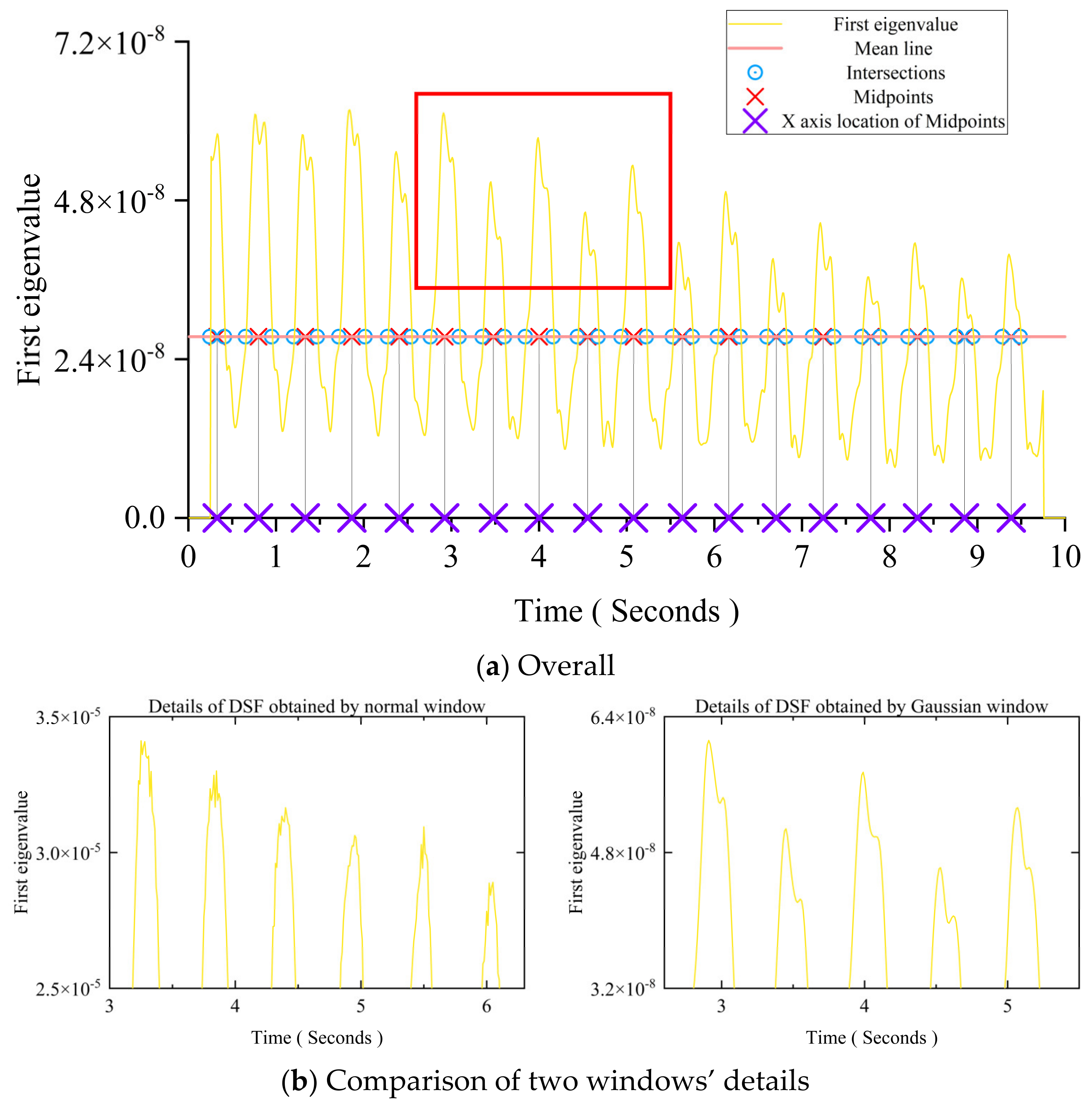
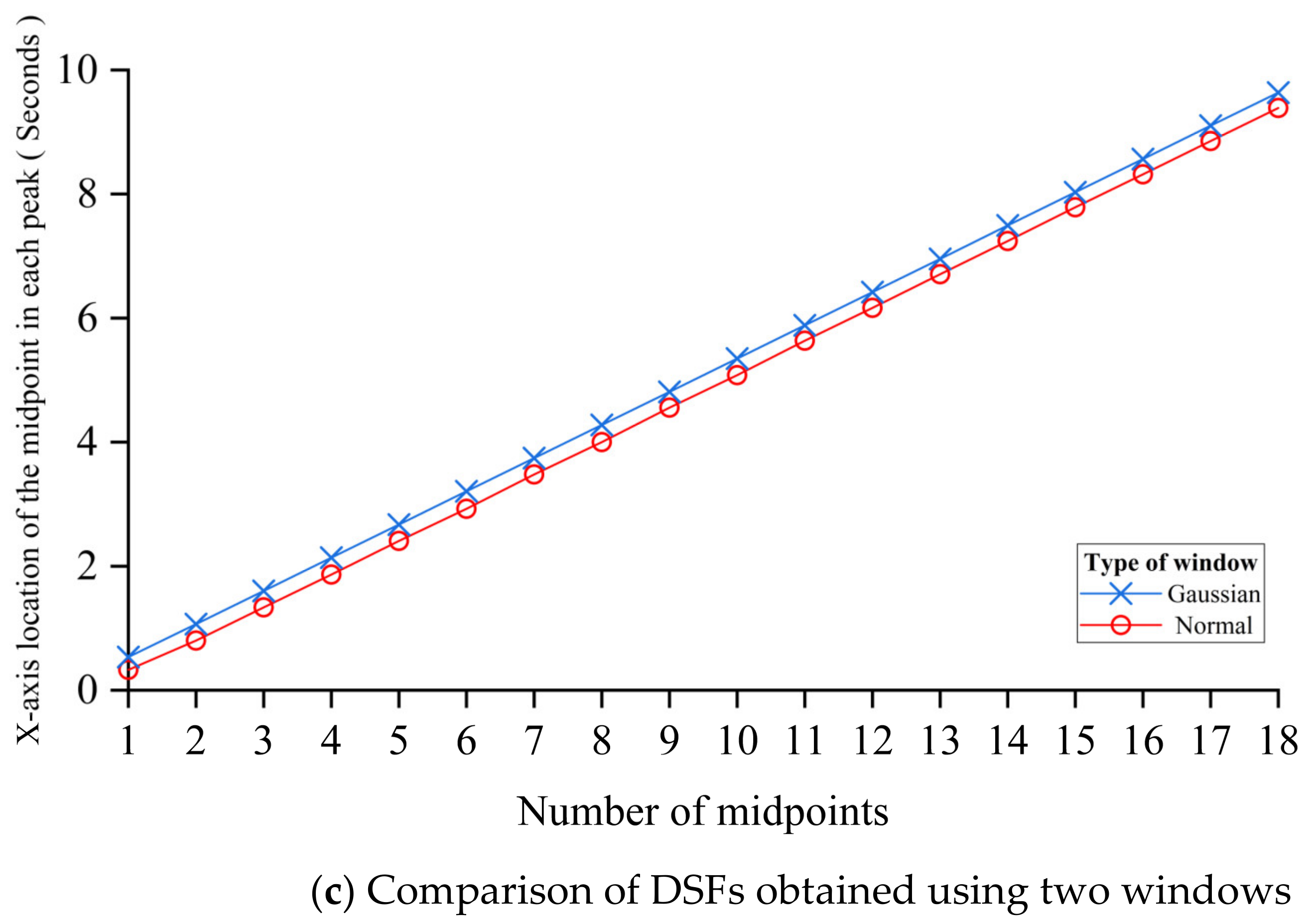
4.2. The Gaussian Window
4.3. Parametric Study
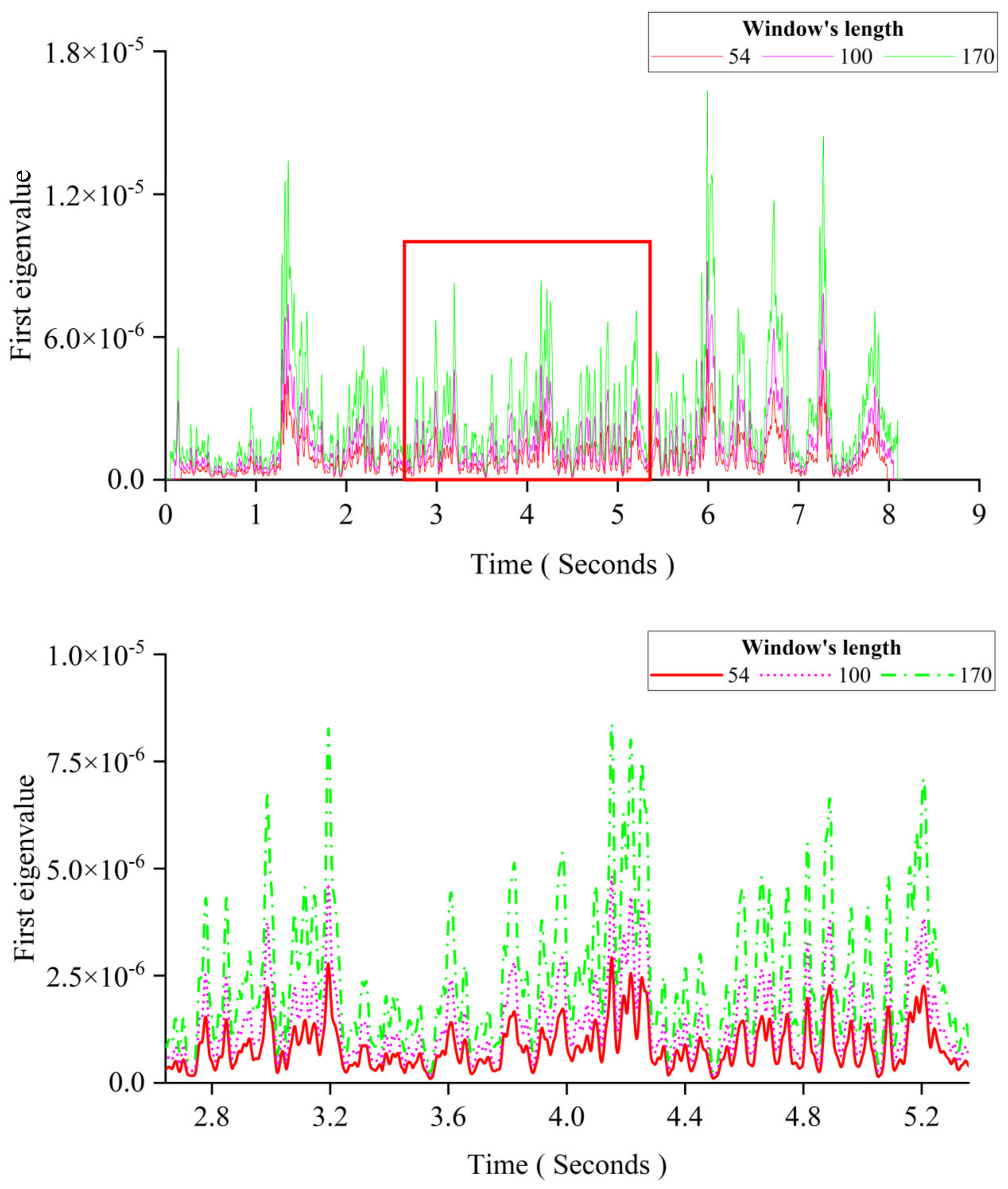
4.3.1. The Effect of the Window Length
4.3.2. Hyperparameter of the Gaussian Window
4.4. Experimental Results and Discussions
5. Conclusions
- (1)
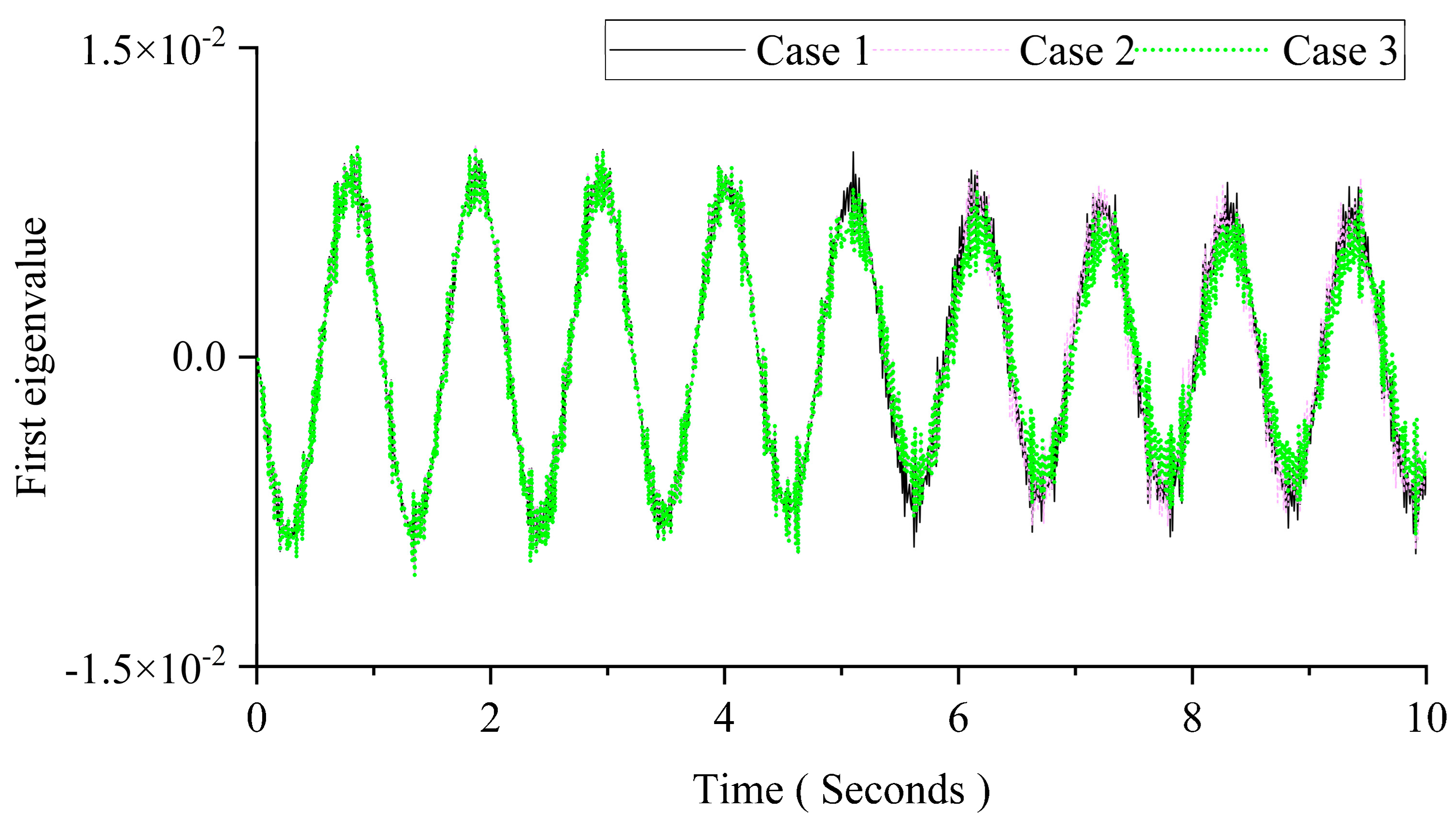
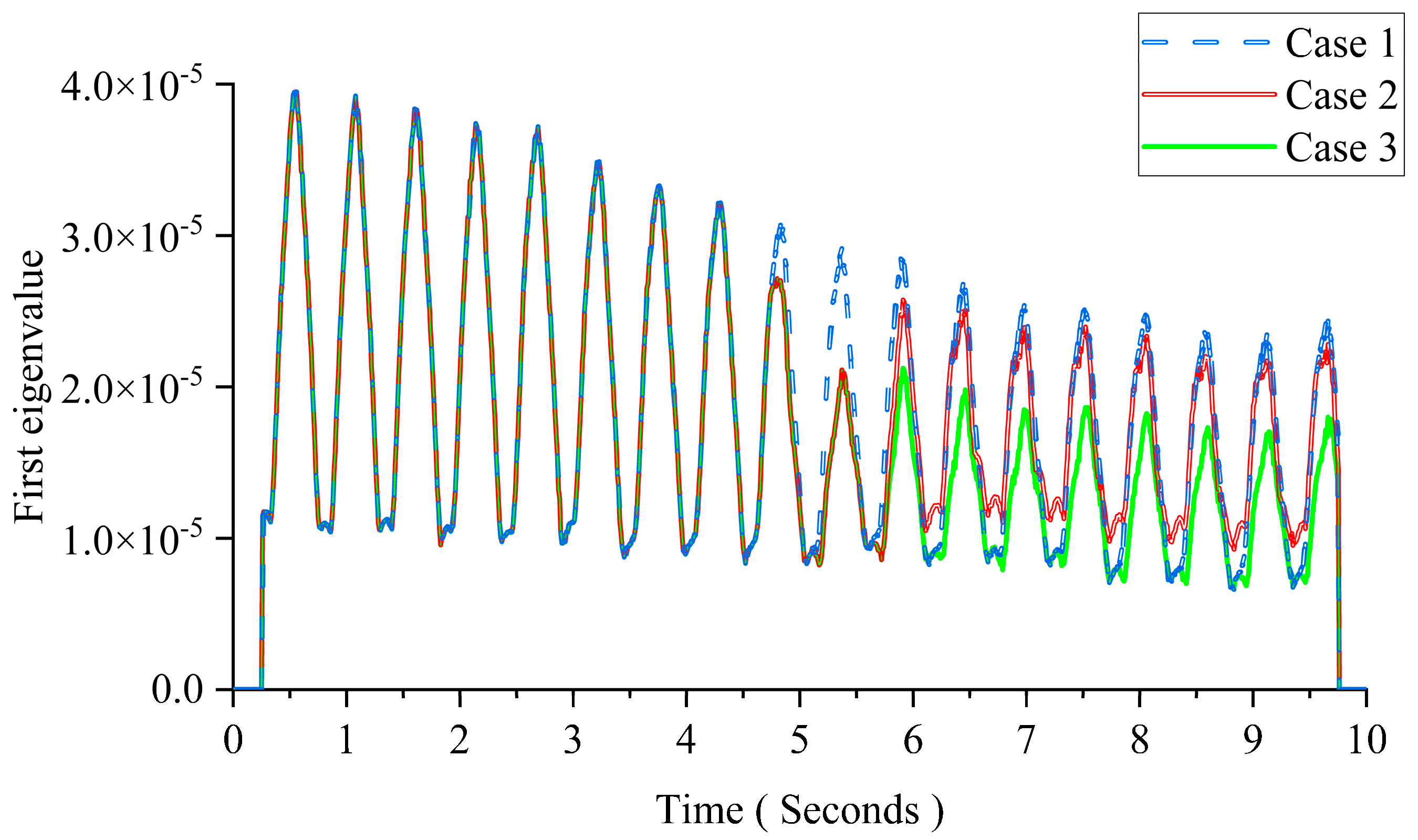
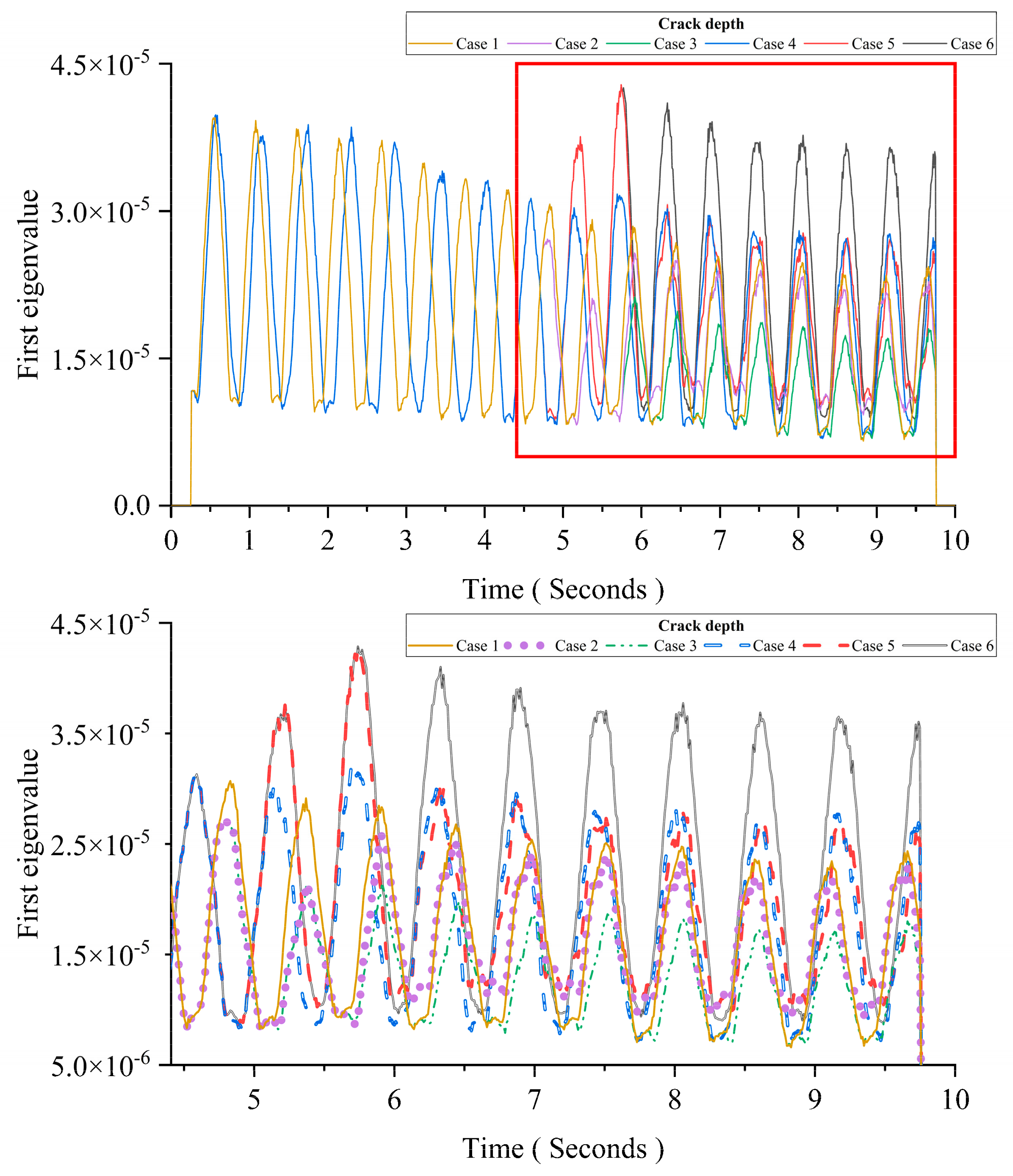
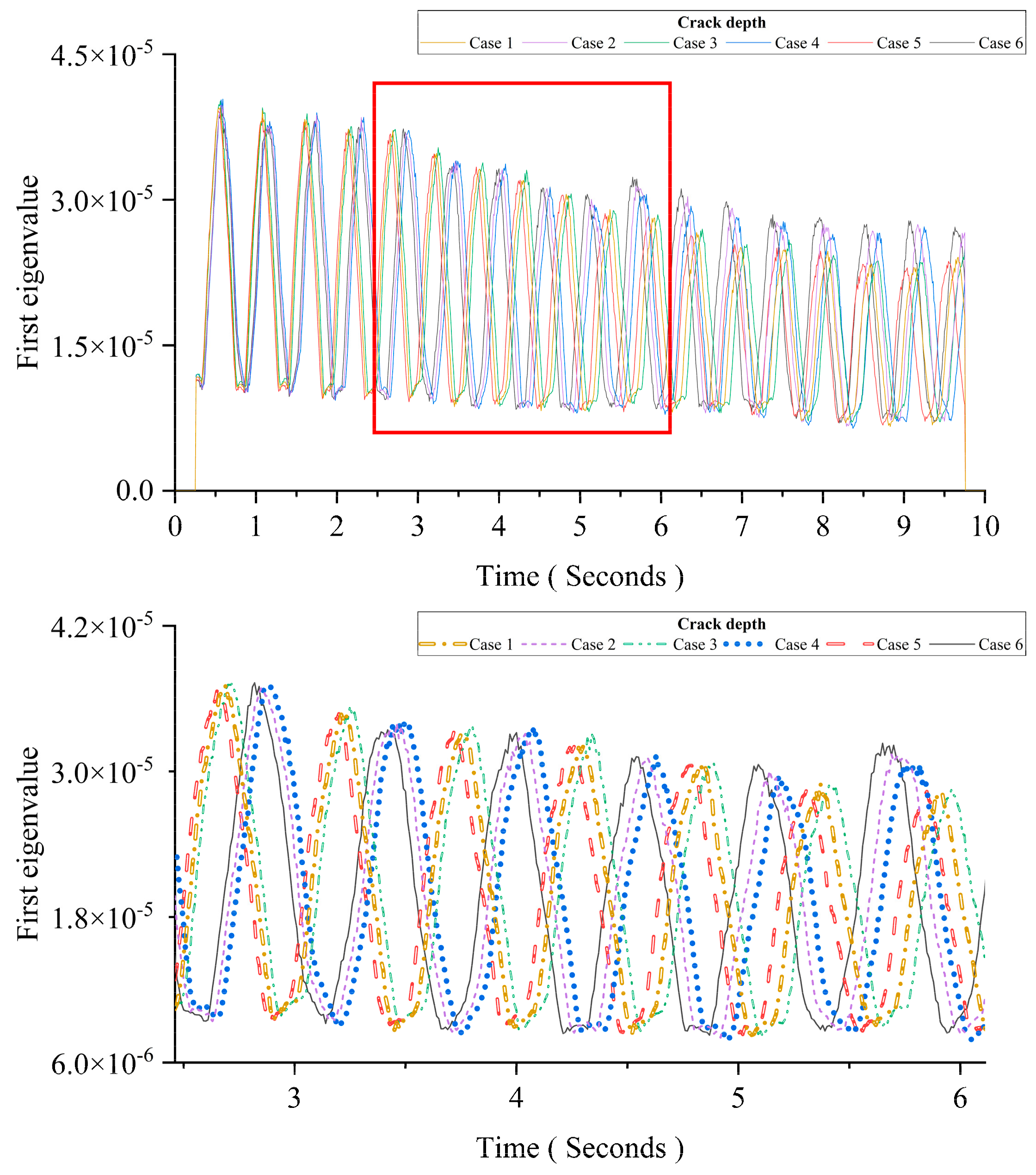
- The gradient of the first eigenvalue curve obtained from raw acceleration signals using MPCA is used as the damage-sensitive feature (DSF) of the highway bridge. The DSF can clearly reflect the existence of the breathing crack on the bridge. The change pattern of the first eigenvalue curve induced by the different vehicle’s mass, temperature fluctuations, different damage depths, and locations has been studied, and the results show the robustness, accuracy, and practicality of the proposed DSF.
- (2)
- The DSF is not limited to a few pre-considered parameters but rather reflects the beam’s damage extent from a dynamic perspective. As the damage in the concrete structures is a crack zone in the actual situation, the equivalent crack depth indicated by this DSF could reflect the damage extent of the beam.
- (3)
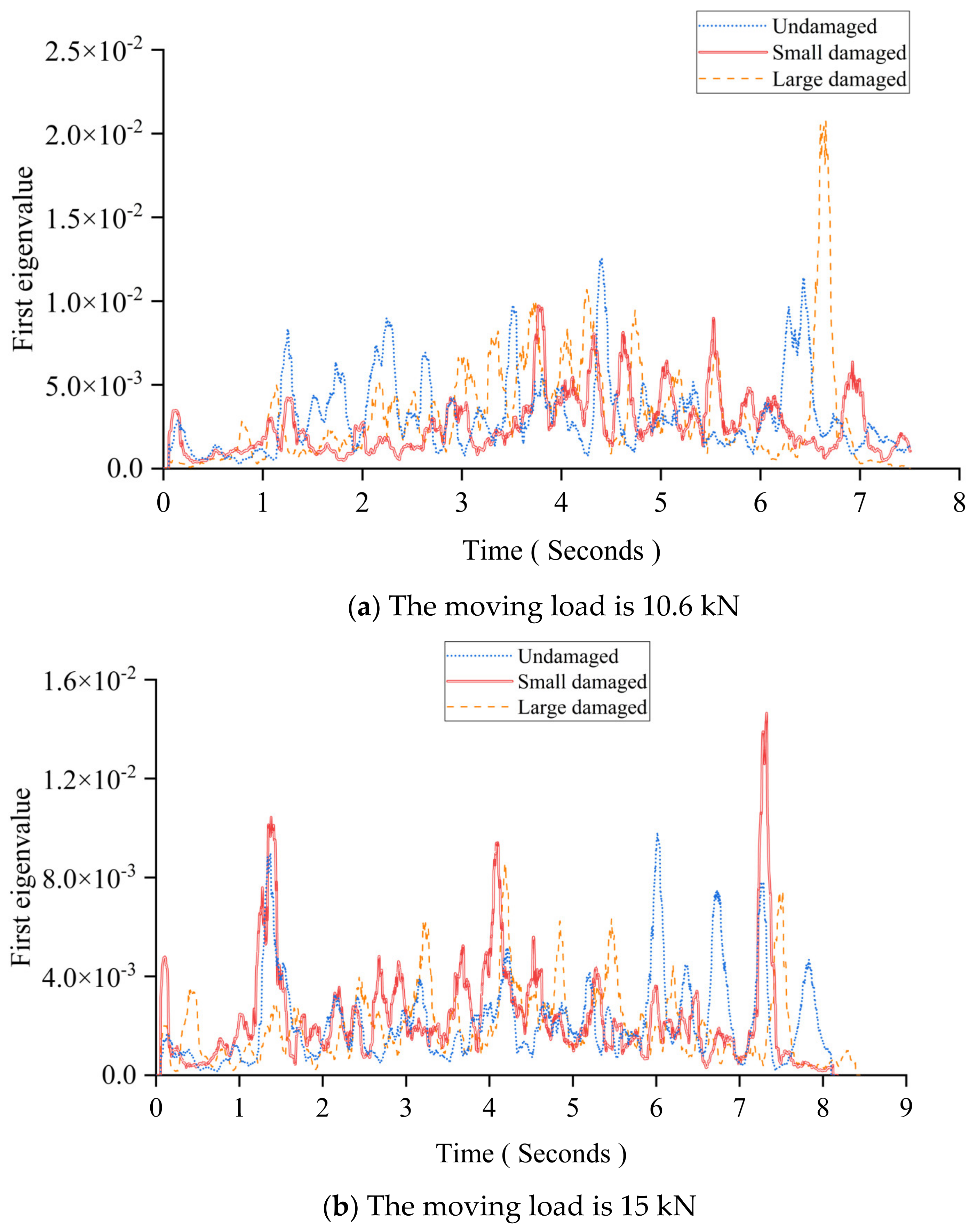
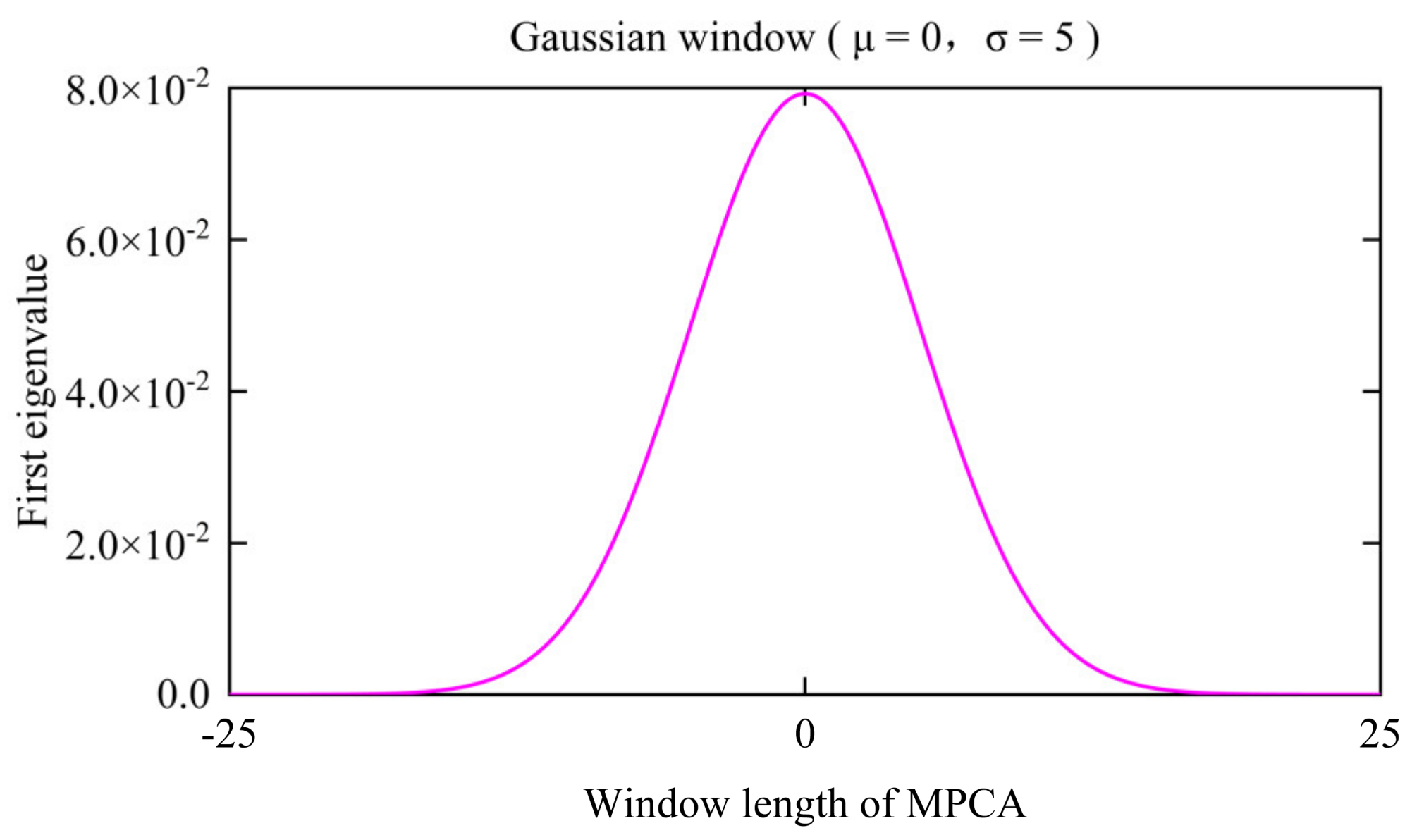
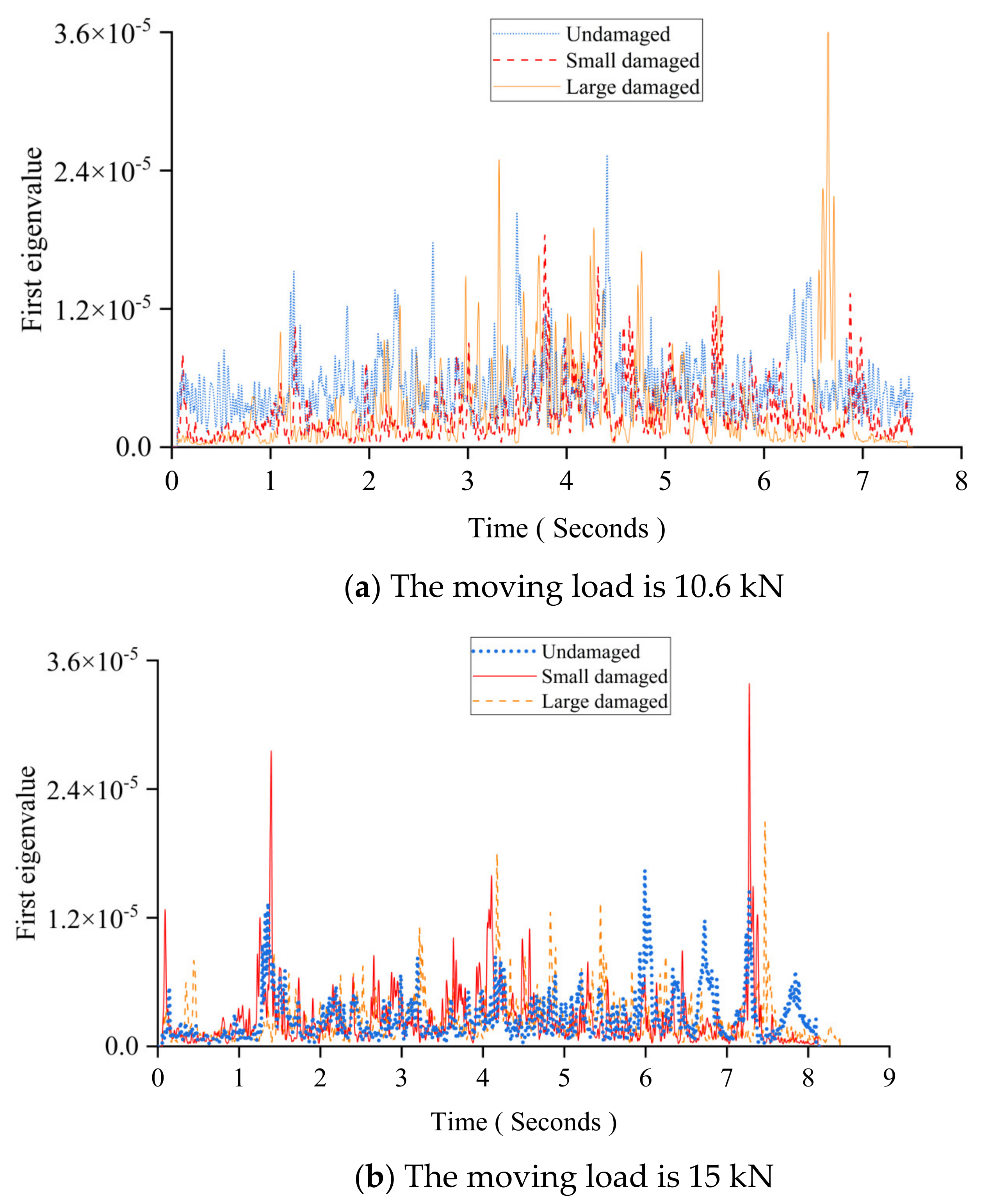
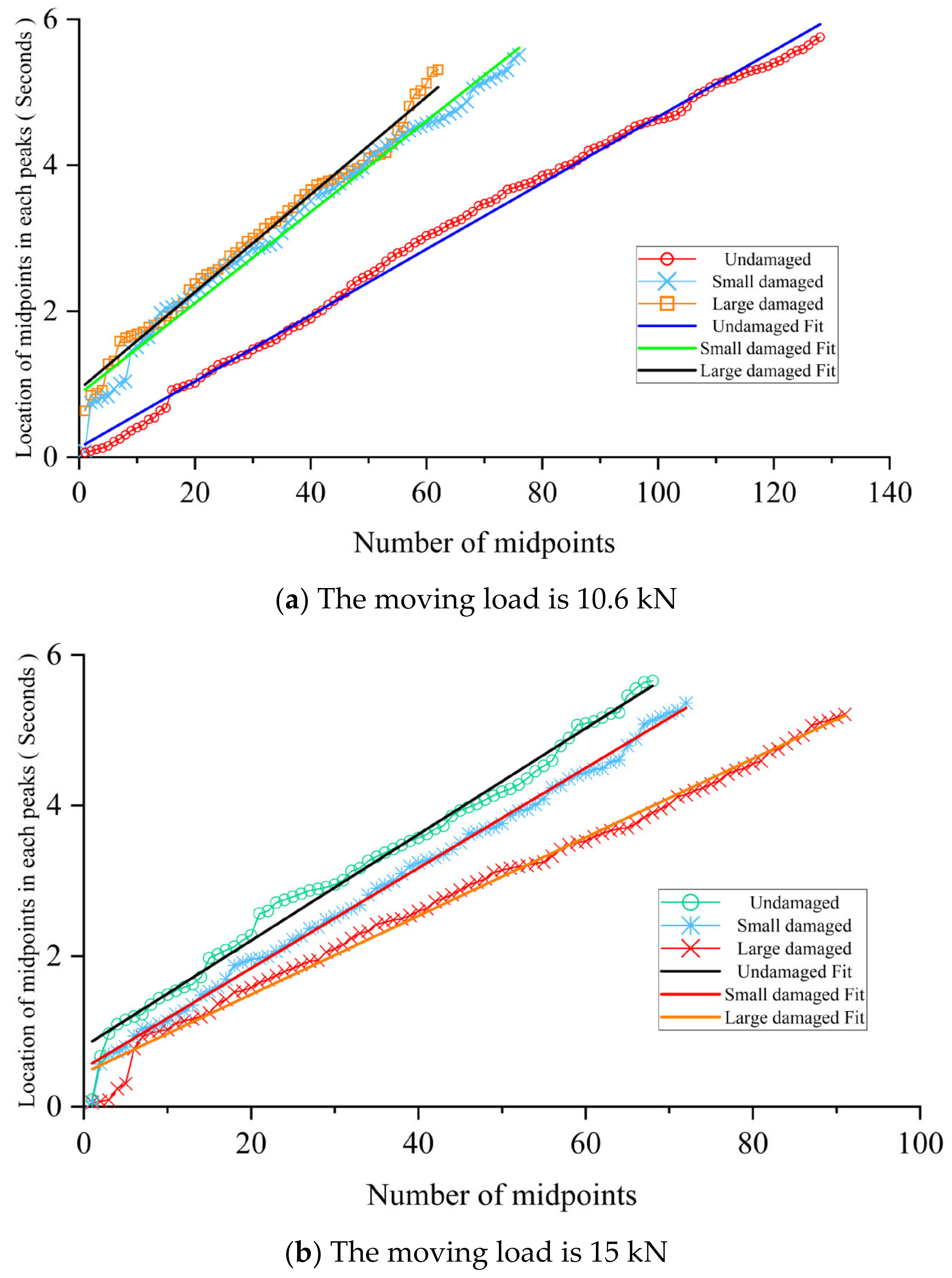
- The experimental results show that the Gaussian window is useful for improving the performance of MPCA on actual datasets. This window can filter out the impact of effects like measurement noise and the vehicle–bridge interaction. The experimental results also show that the DSF can detect and distinguish crack damage of different extents under the different vehicles’ weights.
- (4)
- The method has been verified with a bridge subjected to one moving vehicle. Further studies are needed for practical applications, with a bridge subjected to multiple vehicles.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Cawley, P. Structural health monitoring: Closing the gap between research and industrial deployment. Struct. Health Monit. 2018, 17, 1225–1244. [Google Scholar] [CrossRef]
- An, Y.; Chatzi, E.; Sim, S.H.; Laflamme, S.; Blachowski, B.; Ou, J. Recent progress and future trends on damage identification methods for bridge structures. Struct. Control Health Monit. 2019, 26, e2416. [Google Scholar] [CrossRef]
- Bao, Y.; Chen, Z.; Wei, S.; Xu, Y.; Tang, Z.; Li, H. The state of the art of data science and engineering in structural health monitoring. Engineering 2019, 5, 234–242. [Google Scholar] [CrossRef]
- Sun, L.; Shang, Z.; Xia, Y.; Bhowmick, S.; Nagarajaiah, S. Review of Bridge Structural Health Monitoring Aided by Big Data and Artificial Intelligence: From Condition Assessment to Damage Detection. J. Struct. Eng. 2020, 146, 04020073. [Google Scholar] [CrossRef]
- Law, S.-S.; Zhu, X.-Q. Damage Models and Algorithms for Assessment of Structures under Operating Conditions: Structures and Infrastructures Book Series, 1st ed.; CRC Press: London, UK, 2009; Volume 5. [Google Scholar]
- Kromanis, R.; Kripakaran, P. Data-driven approaches for measurement interpretation: Analysing integrated thermal and vehicular response in bridge structural health monitoring. Adv. Eng. Inform. 2017, 34, 46–59. [Google Scholar] [CrossRef]
- Han, Q.; Ma, Q.; Xu, J.; Liu, M. Structural health monitoring research under varying temperature condition: A review. J. Civ. Struct. Health Monit. 2021, 11, 149–173. [Google Scholar] [CrossRef]
- Gu, J.; Gul, M.; Wu, X. Damage detection under varying temperature using artificial neural networks. Struct. Control Health Monit. 2017, 24, e1998. [Google Scholar] [CrossRef]
- Kim, J.-T.; Park, J.-H.; Lee, B.-J. Vibration-based damage monitoring in model plate-girder bridges under uncertain temperature conditions. Eng. Struct. 2007, 29, 1354–1365. [Google Scholar] [CrossRef]
- Kostić, B.; Gül, M. Vibration-based damage detection of bridges under varying temperature effects using time-series analysis and artificial neural networks. J. Bridge Eng. 2017, 22, 04017065. [Google Scholar] [CrossRef]
- Zhang, H.; Gül, M.; Kostić, B. Eliminating temperature effects in damage detection for civil infrastructure using time series analysis and autoassociative neural networks. J. Aerosp. Eng. 2019, 32, 04019001. [Google Scholar] [CrossRef]
- Erazo, K.; Sen, D.; Nagarajaiah, S.; Sun, L. Vibration-based structural health monitoring under changing environmental conditions using Kalman filtering. Mech. Syst. Signal Process. 2019, 117, 1–15. [Google Scholar] [CrossRef]
- Sarmadi, H.; Karamodin, A. A novel anomaly detection method based on adaptive Mahalanobis-squared distance and one-class kNN rule for structural health monitoring under environmental effects. Mech. Syst. Signal Process. 2020, 140, 106495. [Google Scholar] [CrossRef]
- Kromanis, R.; Kripakaran, P. SHM of bridges: Characterising thermal response and detecting anomaly events using a temperature-based measurement interpretation approach. J. Civ. Struct. Health Monit. 2016, 6, 237–254. [Google Scholar] [CrossRef]
- Wang, Y.; Ni, Y. Bayesian dynamic forecasting of structural strain response using structural health monitoring data. Struct. Control Health Monit. 2020, 27, e2575. [Google Scholar] [CrossRef]
- Yuen, K.-V. Bayesian Methods for Structural Dynamics and Civil Engineering; John Wiley & Sons (Asia) Pte Ltd: Singapore, 2010. [Google Scholar]
- Law, S.-S.; Zhu, X.-Q. Moving Loads-Dynamic Analysis and Identification Techniques: Structures and Infrastructures Book Series, 1st ed.; CRC Press: London, UK, 2011; Volume 8. [Google Scholar]
- Martinez, D.; Malekjafarian, A.; OBrien, E. Bridge flexural rigidity calculation using measured drive-by deflections. J. Civ. Struct. Health Monit. 2020, 10, 833–844. [Google Scholar] [CrossRef]
- Martinez, D.; Malekjafarian, A.; OBrien, E. Bridge health monitoring using deflection measurements under random traffic. Struct. Control Health Monit. 2020, 27, e2593. [Google Scholar] [CrossRef]
- Shahbaznia, M.; Dehkordi, M.R.; Mirzaee, A. An Improved Time-Domain Damage Detection Method for Railway Bridges Subjected to Unknown Moving Loads. Period. Polytech. Civ. Eng. 2020, 64, 928–938. [Google Scholar] [CrossRef]
- Mao, L.; Weng, S.; Li, S.-J.; Zhu, H.-P.; Sun, Y.-H. Statistical damage identification method based on dynamic response sensitivity. J. Low Freq. Noise Vib. Act. Control 2020, 39, 560–571. [Google Scholar] [CrossRef]
- Deraemaeker, A.; Worden, K. A comparison of linear approaches to filter out environmental effects in structural health monitoring. Mech. Syst. Signal Process. 2018, 105, 1–15. [Google Scholar] [CrossRef]
- Kumar, K.; Biswas, P.K.; Dhang, N. Damage diagnosis of steel truss bridges under varying environmental and loading conditions. Int. J. Acoust. Vib. 2019, 24, 56–67. [Google Scholar] [CrossRef]
- Shokrani, Y.; Dertimanis, V.K.; Chatzi, E.N.; Savoia, M.N. On the use of mode shape curvatures for damage localization under varying environmental conditions. Struct. Control Health Monit. 2018, 25, e2132. [Google Scholar] [CrossRef]
- Sen, D.; Erazo, K.; Zhang, W.; Nagarajaiah, S.; Sun, L. On the effectiveness of principal component analysis for decoupling structural damage and environmental effects in bridge structures. J. Sound Vib. 2019, 457, 280–298. [Google Scholar] [CrossRef]
- Guo, W.; Zhao, H.; Gao, X.; Kong, L.; Li, Y. An efficient representative for object recognition in structural health monitoring. Int. J. Adv. Manuf. Technol. 2018, 94, 3239–3250. [Google Scholar] [CrossRef]
- Nie, Z.; Guo, E.; Li, J.; Hao, H.; Ma, H.; Jiang, H. Bridge condition monitoring using fixed moving principal component analysis. Struct. Control Health Monit. 2020, 27, e2535. [Google Scholar] [CrossRef]
- Lanata, F.; Posenato, D.; Inaudi, D. Data Anomaly Identification in Complex Structures Using Model Free Data Statistical Analysis. In Proceedings of the 3rd International Conference on Structural Health Monitoring of Intelligent Infrastructure (SHMII-3), Vancouver, BC, Canada, 13–16 November 2007. [Google Scholar]
- Posenato, D.; Lanata, F.; Inaudi, D.; Smith, I.F. Model-free data interpretation for continuous monitoring of complex structures. Adv. Eng. Inform. 2008, 22, 135–144. [Google Scholar] [CrossRef]
- Cavadas, F.; Smith, I.F.; Figueiras, J. Damage detection using data-driven methods applied to moving-load responses. Mech. Syst. Signal Process. 2013, 39, 409–425. [Google Scholar] [CrossRef]
- Zhu, Y.; Ni, Y.-Q.; Jin, H.; Inaudi, D.; Laory, I. A temperature-driven MPCA method for structural anomaly detection. Eng. Struct. 2019, 190, 447–458. [Google Scholar] [CrossRef]
- Jin, S.-S.; Cho, S.; Jung, H.-J. Adaptive reference updating for vibration-based structural health monitoring under varying environmental conditions. Comput. Struct. 2015, 158, 211–224. [Google Scholar] [CrossRef]
- Zhang, G.; Tang, L.; Zhou, L.; Liu, Z.; Liu, Y.; Jiang, Z. Principal component analysis method with space and time windows for damage detection. Sensors 2019, 19, 2521. [Google Scholar] [CrossRef]
- Jin, S.-S.; Jung, H.-J. Vibration-based damage detection using online learning algorithm for output-only structural health monitoring. Struct. Health Monit. 2018, 17, 727–746. [Google Scholar] [CrossRef]
- Li, H. Statistical Learning Method, 2nd ed.; Tsinghua University Press: Beijing, China, 2019. [Google Scholar]
- Zhou, Y.; Xia, Y.; Fujino, Y. Analytical formulas of beam deflection due to vertical temperature difference. Eng. Struct. 2021, 240, 112366. [Google Scholar] [CrossRef]
- Voggu, S.; Sasmal, S. Dynamic nonlinearities for identification of the breathing crack type damage in reinforced concrete bridges. Struct. Health Monit. 2021, 20, 339–359. [Google Scholar] [CrossRef]
- Law, S.; Zhu, X. Vibration of a beam with a breathing crack subject to moving mass. In Computational Methods; Liu, G.R., Tan, V.B.C., Han, X., Eds.; Springer: Dordrecht, The Netherlands, 2006; pp. 1963–1968. [Google Scholar]
- Tada, H.; Paris, P.C.; Irwin, G.R. The Analysis of Cracks Handbook, 3rd ed.; ASME Press: New York, NY, USA, 2000; p. 698. [Google Scholar]
- Zhu, X.Q.; Law, S.S. Wavelet-based crack identification of bridge beam from operational deflection time history. Int. J. Solids Struct. 2006, 43, 2299–2317. [Google Scholar] [CrossRef]

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Formula | Coefficient | ||
|---|---|---|---|---|
| Expansion | ||||
| Young’s modulus | ||||
| Second moment of inertia |
| Natural Frequencies | |
|---|---|
| By Zhu and Law [40] | By the Proposed Method |
| 0.94 | 0.9375 |
| 3.75 | 3.7501 |
| 8.44 | 8.4377 |
| 15.00 | 15.0004 |
| 23.44 | 23.4390 |
| 33.75 | 33.7547 |
| Case | Mass Change | Time Duration | |
|---|---|---|---|
| Start Time | End Time | ||
| 1 | 0% | - | - |
| 2 | 1% | 5 s | 6 s |
| 3 | 1% | 5 s | 10 s |
| Case | Mass Change | Time Duration | Crack Depth | |
|---|---|---|---|---|
| Start Time | End Time | |||
| 1 | 0% | - | - | 0 |
| 2 | 1% | 5 s | 6 s | 0 |
| 3 | 1% | 5 s | 10 s | 0 |
| 4 | 0% | - | - | 50% |
| 5 | 1% | 5 s | 6 s | 50% |
| 6 | 1% | 5 s | 10 s | 50% |
| Case | Crack Depth | |||
|---|---|---|---|---|
| Start Time | End Time | |||
| 1 | 25 | 0 | 0 | 0 |
| 2 | 25 | 0 | 0 | 50% |
| 3 | 40 | 28 | 25 | 0 |
| 4 | 40 | 28 | 25 | 50% |
| 5 | 10 | 20 | 15 | 0 |
| 6 | 10 | 20 | 15 | 50% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yuan, Y.; Zhu, X.; Li, J. Moving-Principal-Component-Analysis-Based Structural Damage Detection for Highway Bridges in Operational Environments. Sensors 2024, 24, 383. https://doi.org/10.3390/s24020383
Yuan Y, Zhu X, Li J. Moving-Principal-Component-Analysis-Based Structural Damage Detection for Highway Bridges in Operational Environments. Sensors. 2024; 24(2):383. https://doi.org/10.3390/s24020383
Chicago/Turabian StyleYuan, Ye, Xinqun Zhu, and Jun Li. 2024. "Moving-Principal-Component-Analysis-Based Structural Damage Detection for Highway Bridges in Operational Environments" Sensors 24, no. 2: 383. https://doi.org/10.3390/s24020383