



Enhancing Seismic Damage Detection and Assessment in Highway Bridge Systems: A Pattern Recognition Approach with Bayesian Optimization

Abstract
:1. Introduction
2. Damage Feature Extraction
3. Pattern Recognition
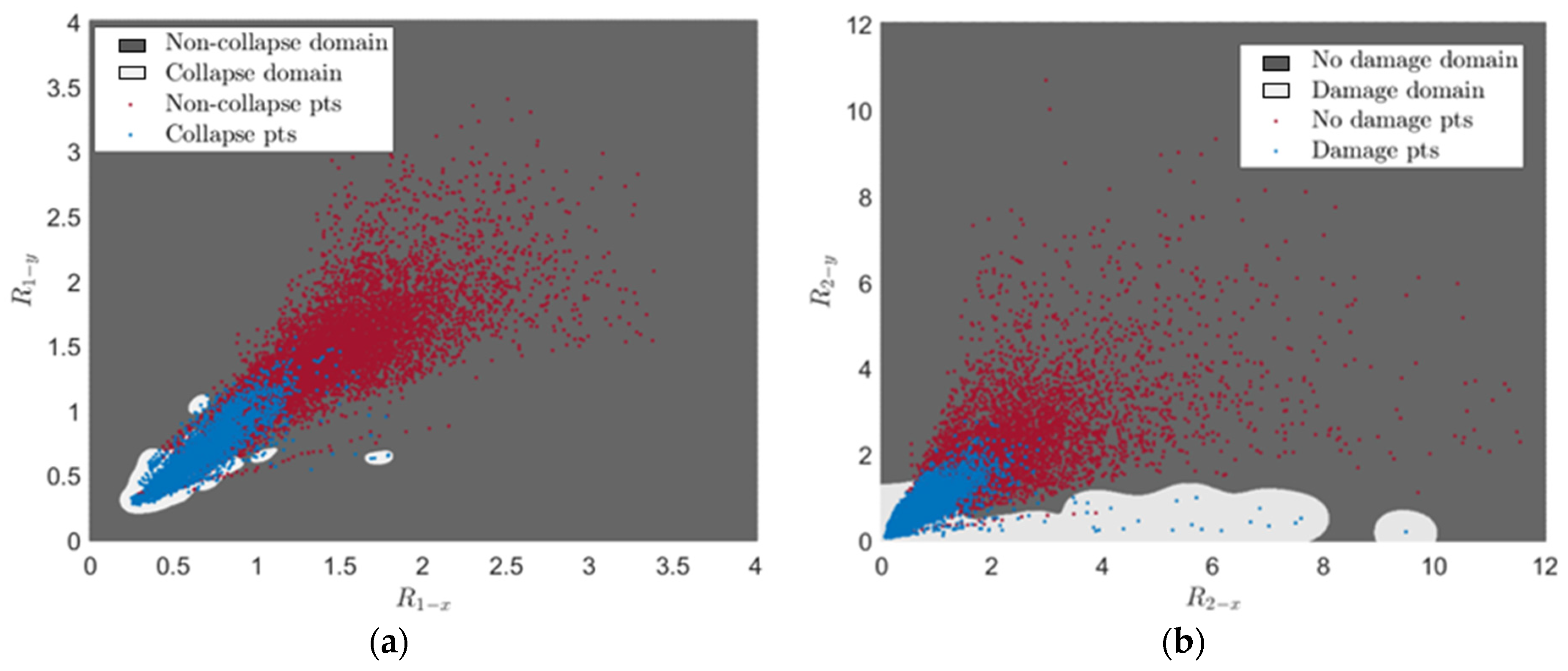
3.1. Support Vector Machine
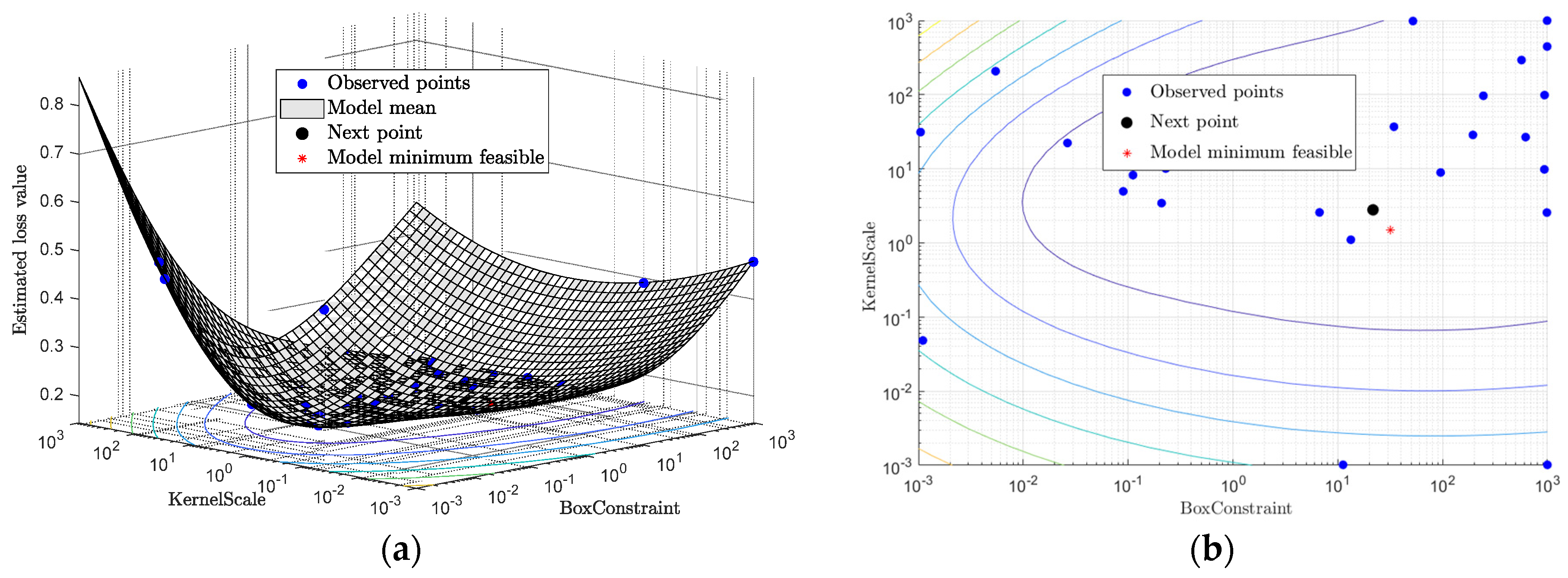
3.2. Bayesian Optimization
| Algorithm 1 SVM with Bayesian optimization |
for do
|
- Generate damage features from the training data, as detailed in Section 2;
- Train and fine-tune support vector machines (SVMs) according to the procedures outlined in Section 3. This involves using the generated damage features from Step 1 along with corresponding labels (e.g., damaged or not);
- Employ the trained SVMs from Step 2 for future predictions when a new set of acceleration records is acquired.
4. Case Study
4.1. Computational Bridge Model and Ground Motion Selection
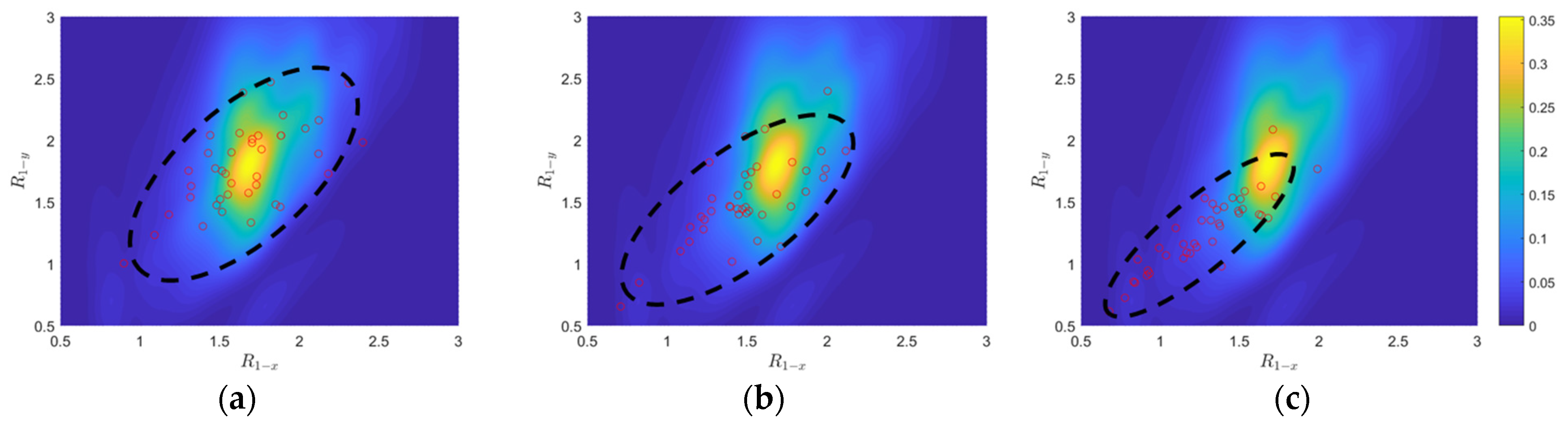
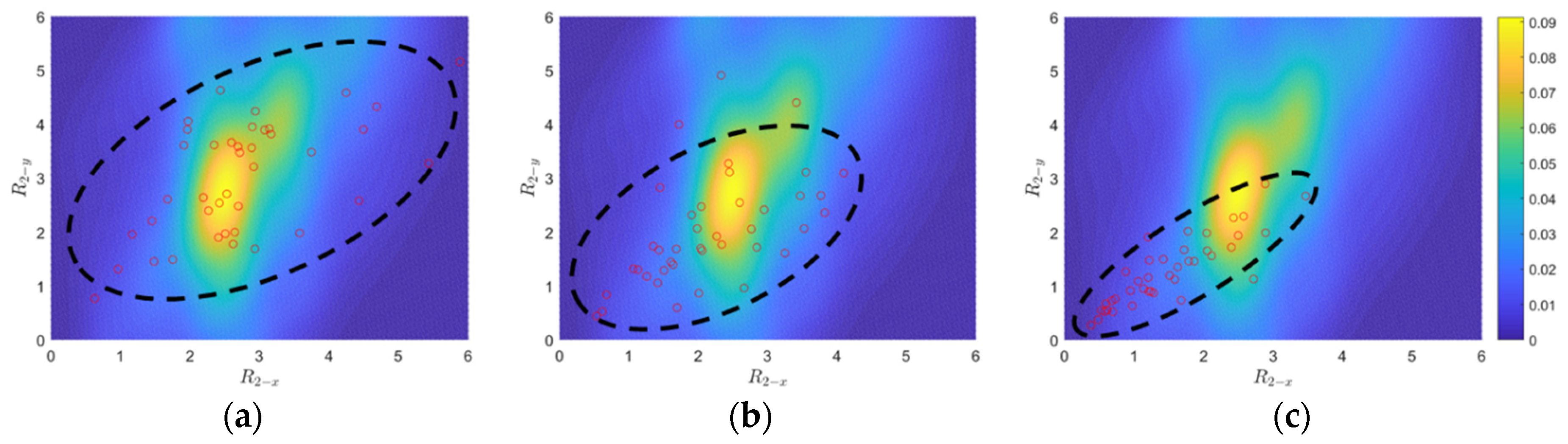
4.2. Damage Feature
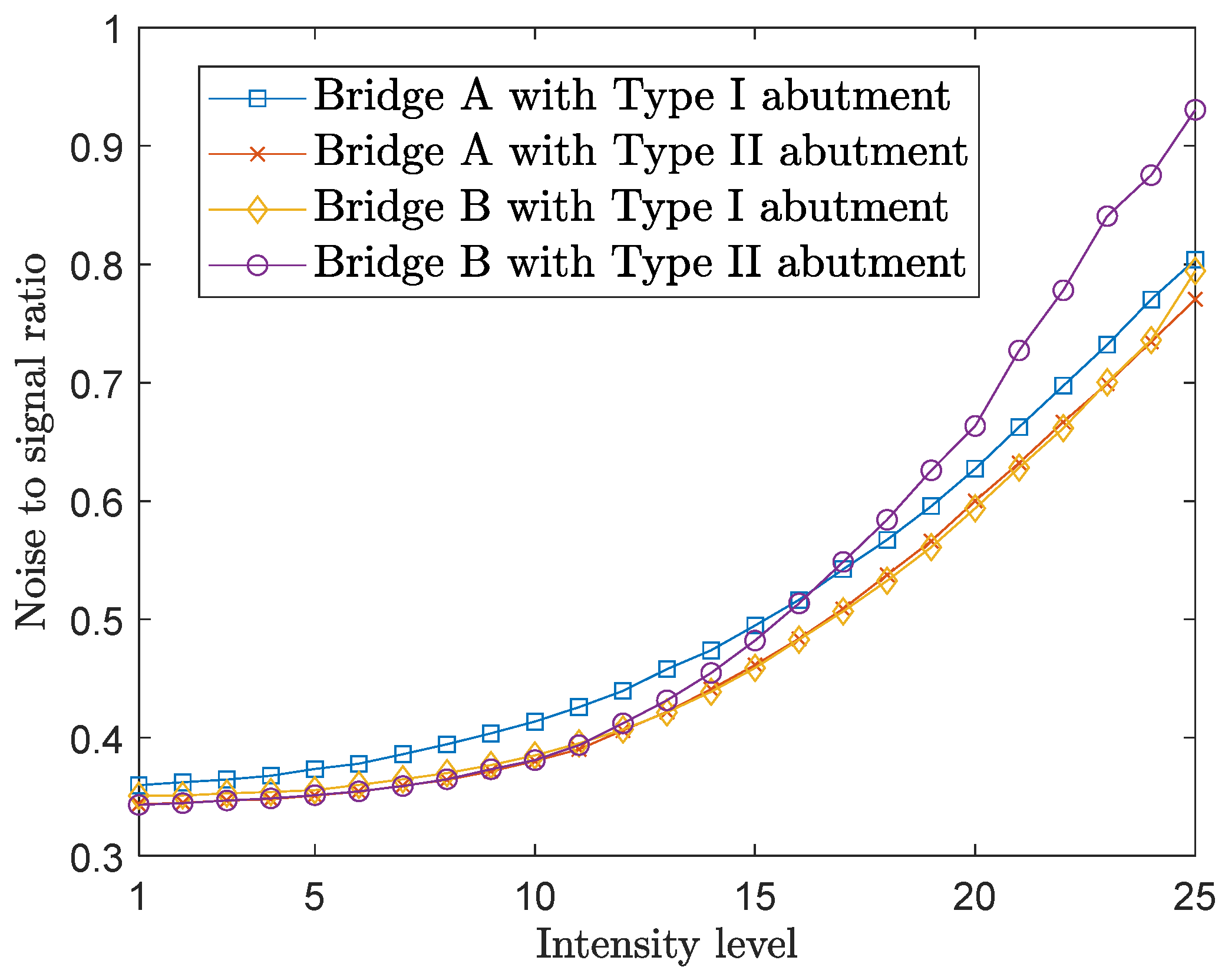
4.3. Simulated Measurement Noise
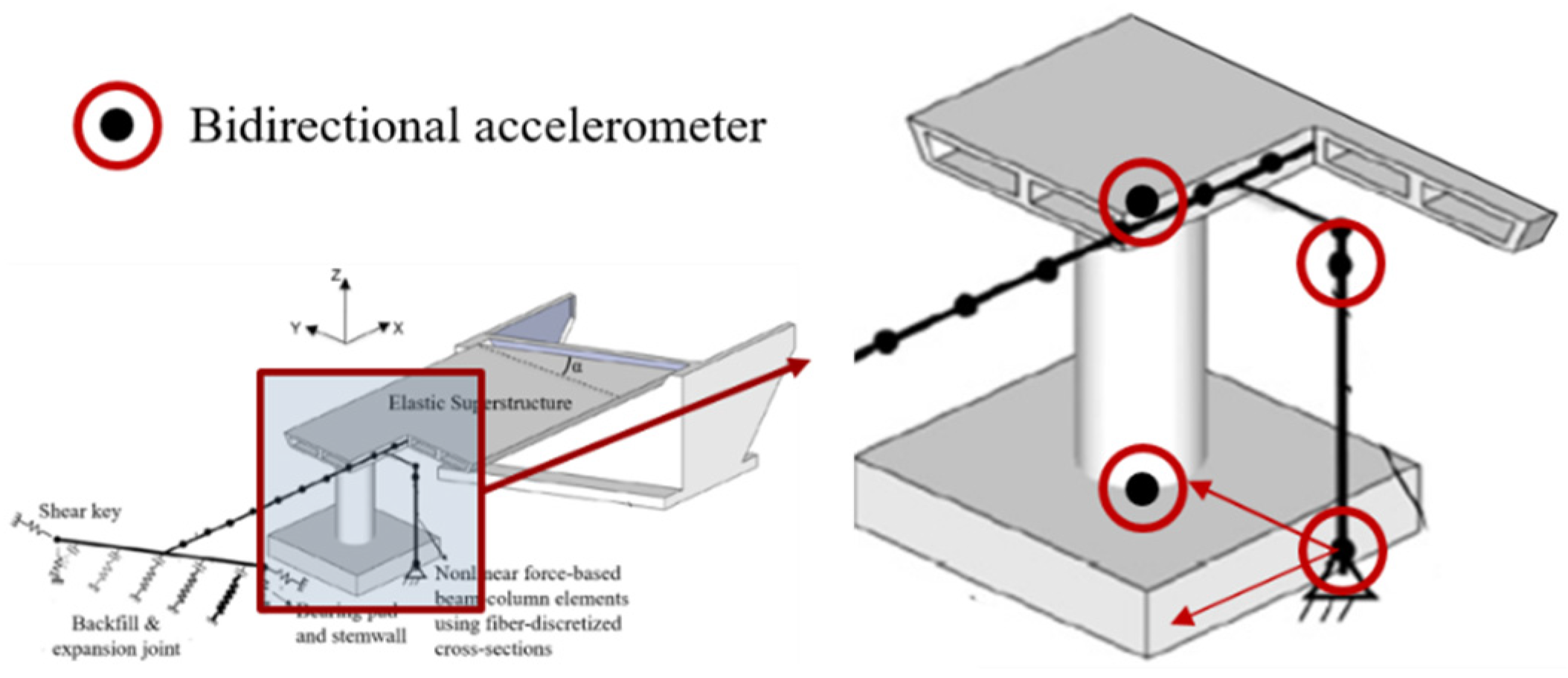
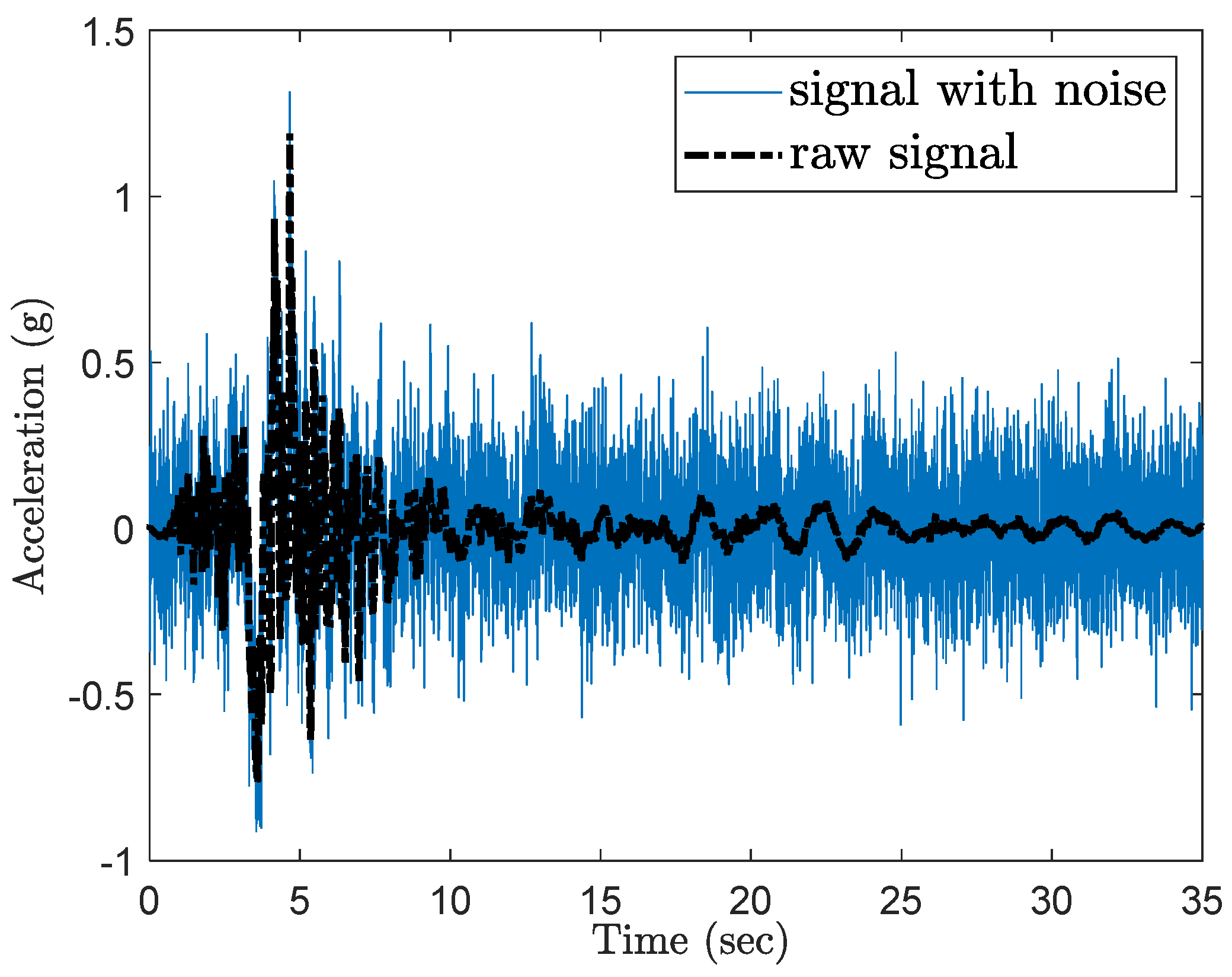
- Random Gaussian noise, with a noise-to-signal ratio of 30% (calculated as the ratio of standard deviations within the duration of each ground motion), is added to the acceleration time history of the input GM excitation at the column bottom (see Figure 1);
- The acceleration time history at the column top is obtained by summing up the acceleration at the ground level (with noise) from Step 1 and the relative acceleration from NTHA simulations. Note that the relative acceleration is recorded in OpenSees [48] for the column top;
- Again, random Gaussian noise with a noise-to-signal ratio of 30% is added to the obtained acceleration time history at the column top in Step 2. Figure 7 illustrates the comparison of the acceleration signal at the column top with and without noise for one GM scaled to the highest intensity level.
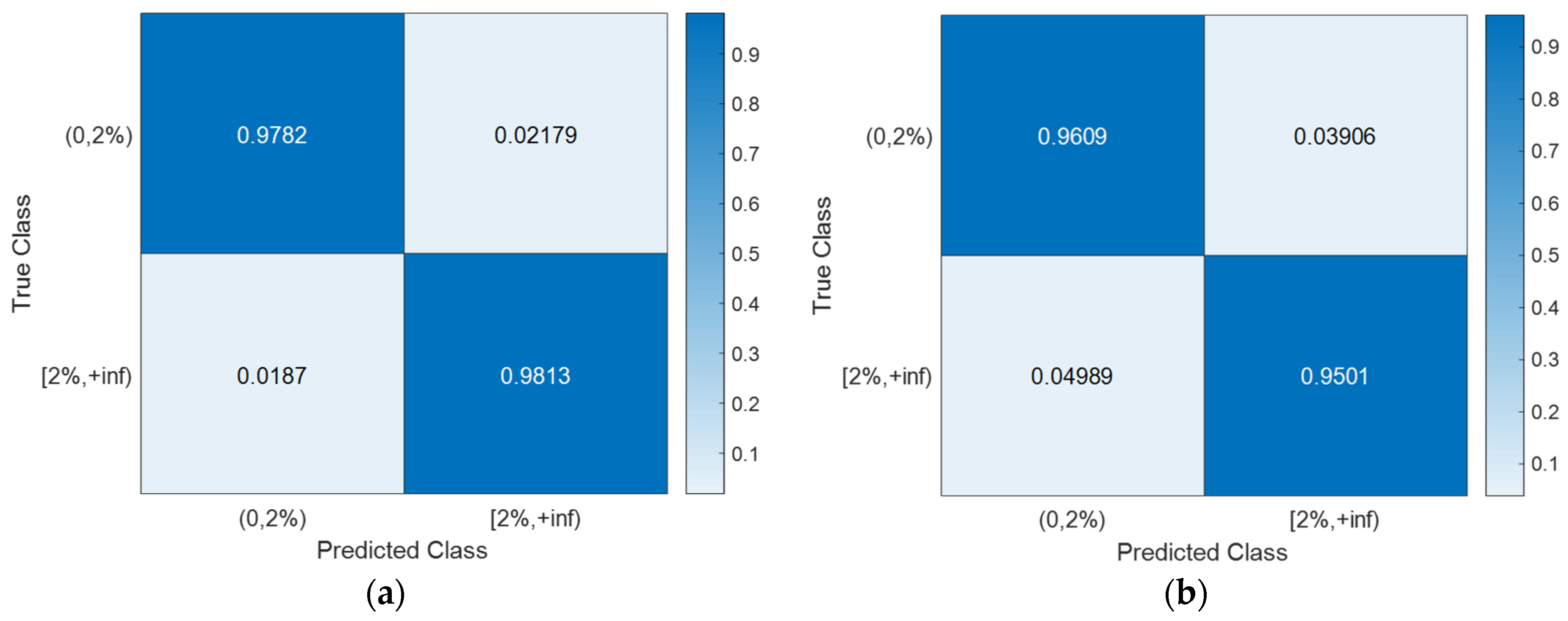
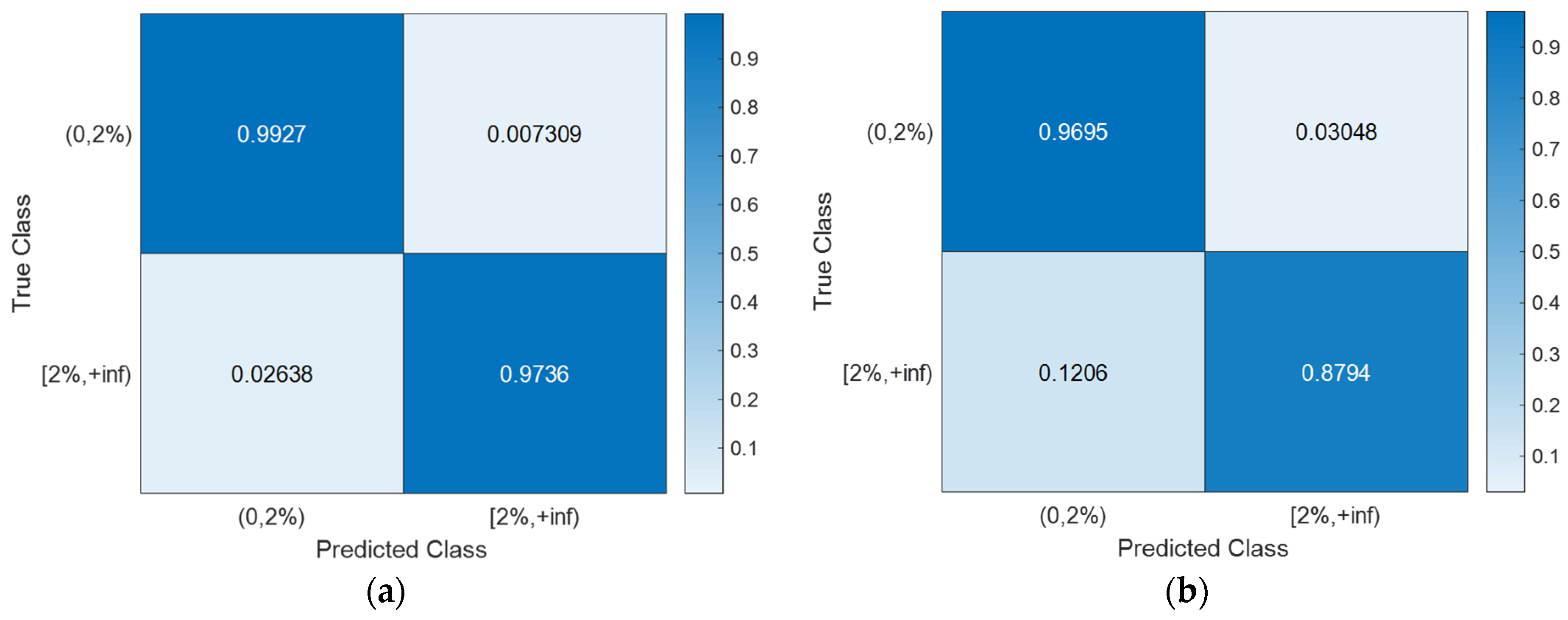
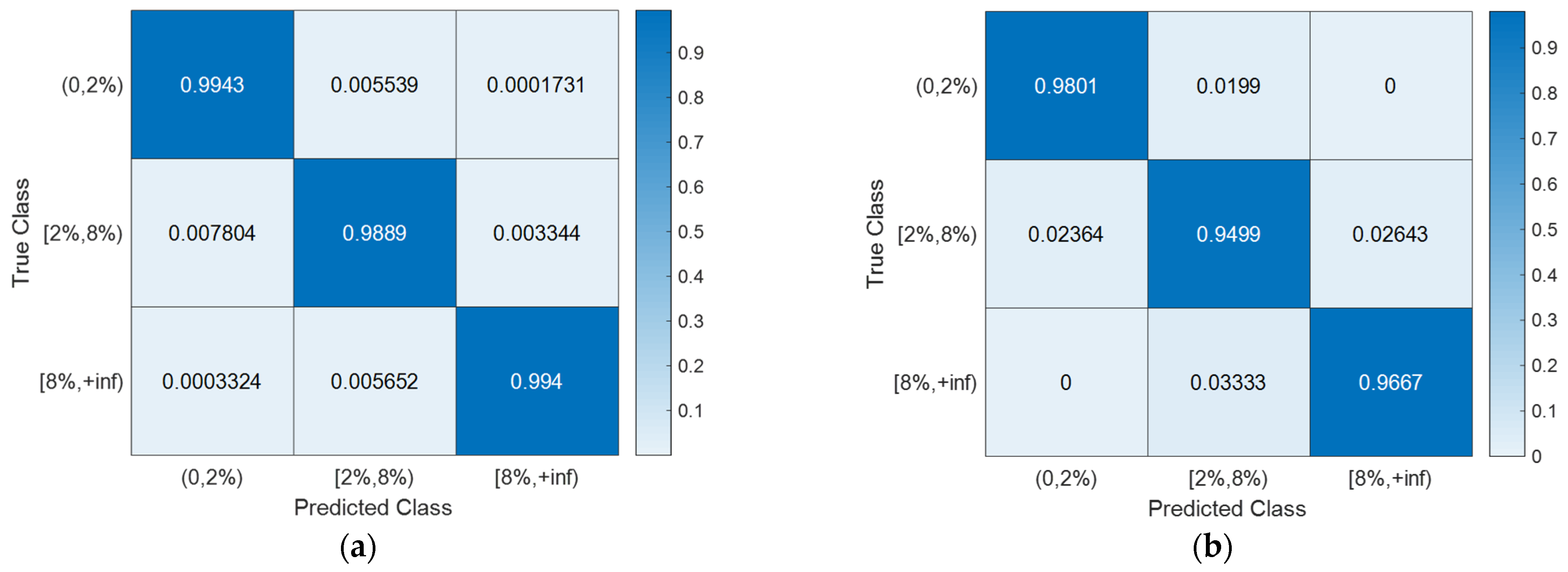
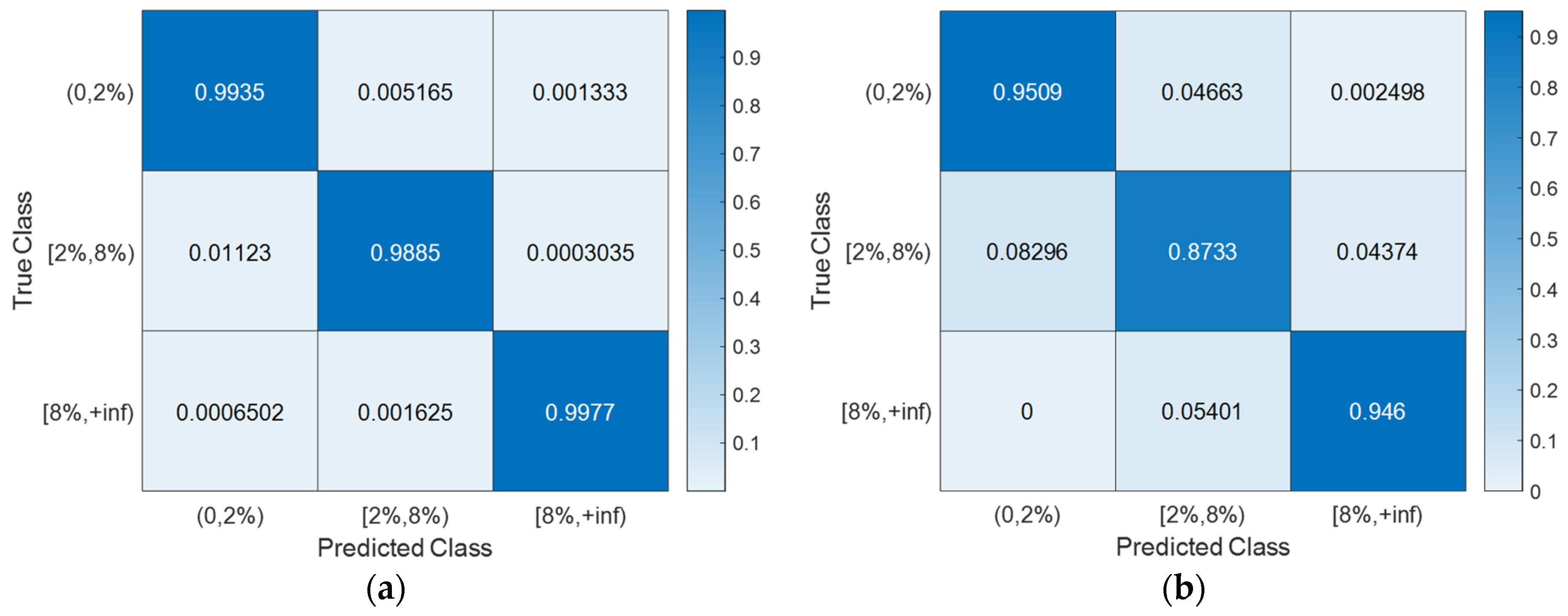
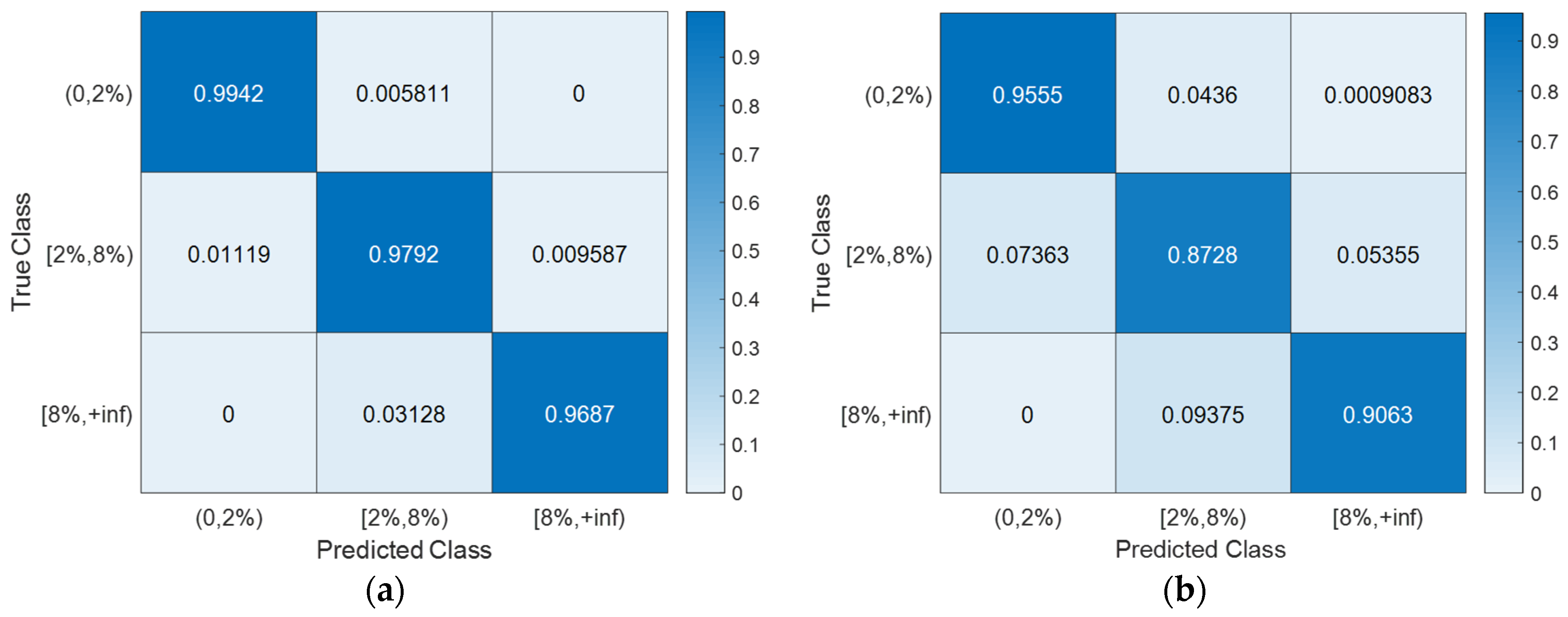
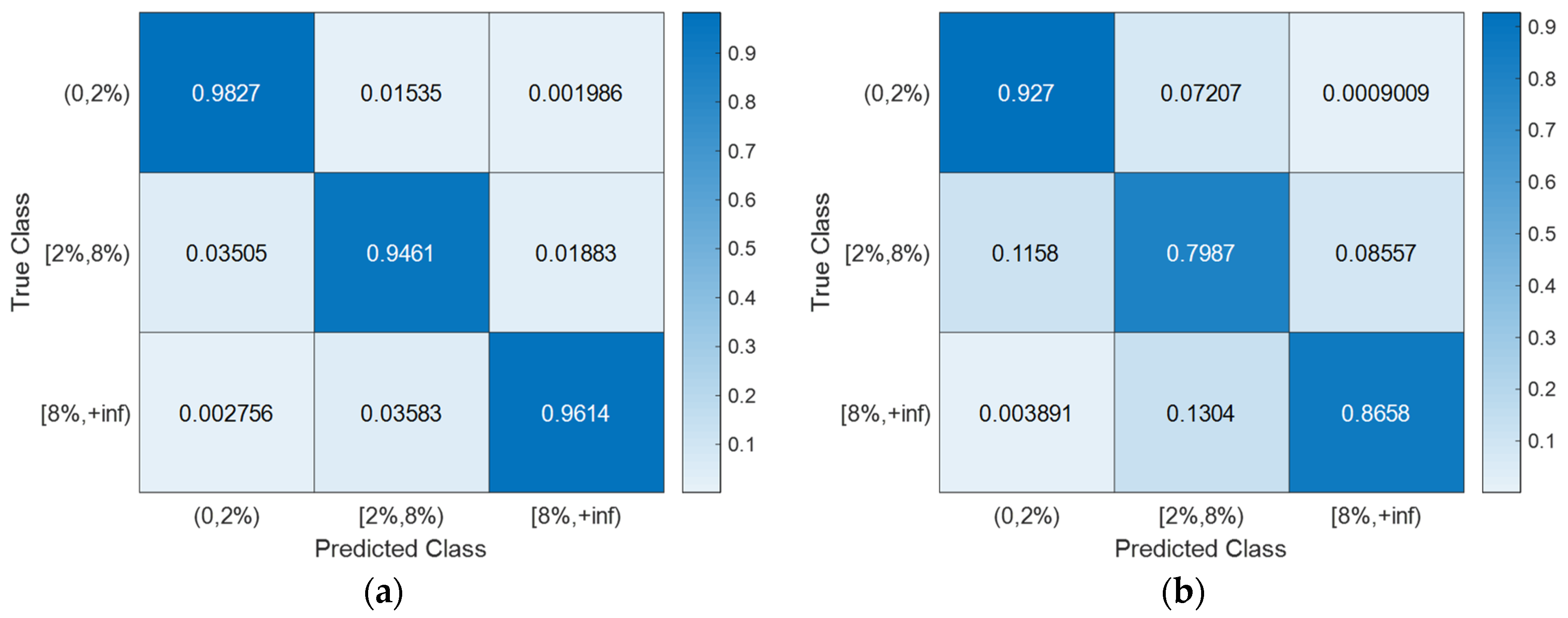
4.4. Classification Results
5. Conclusions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A
- Apply Independent Component (IC) analysis to the data , e.g., , in the original space to obtain the data in the IC space as follows:where stands for mean matrix of and .
- Apply KDE to each IC and the joint PDF in the IC space can be obtained as follows:
- The joint PDF in the original space can be obtained as follows with |●| denotes the determinate of the matrix:
References
- ASCE. Infrastructure Report Card. 2021. Available online: https://www.infrastructurereportcard.org/ (accessed on 1 November 2023).
- Comfort, L.K. Crisis management in hindsight: Cognition, communication, coordination, and control. Public Adm. Rev. 2007, 67, 189–197. [Google Scholar]
- Bruneau, M.; Chang, S.E.; Eguchi, R.T.; Lee, G.C.; O’Rourke, T.D.; Reinhorn, A.M.; Shinozuka, M.; Tierney, K.; Wallace, W.A.; Von Winterfeldt, D. A framework to quantitatively assess and enhance the seismic resilience of communities. Earthq. Spectra 2003, 19, 733–752. [Google Scholar]
- Farrar, C.R.; Worden, K. Structural Health Monitoring: A Machine Learning Perspective; John Wiley & Sons: New York, NY, USA, 2012. [Google Scholar]
- Sajedi, S.O.; Liang, X. Uncertainty-assisted deep vision structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 126–142. [Google Scholar]
- Liang, X. Image-based post-disaster inspection of reinforced concrete bridge systems using deep learning with Bayesian optimization. Comput.-Aided Civ. Infrastruct. Eng. 2019, 34, 415–430. [Google Scholar] [CrossRef]
- Spencer, B.F., Jr.; Hoskere, V.; Narazaki, Y. Advances in Computer Vision-Based Civil Infrastructure Inspection and Monitoring. Engineering 2019, 5, 199–222. [Google Scholar]
- Sajedi, S.; Eltouny, K.A.; Liang, X. Twin models for high-resolution visual inspections. Smart Struct. Syst. 2023, 31, 351–363. [Google Scholar]
- Rehman, S.K.U.; Ibrahim, Z.; Memon, S.A.; Jameel, M. Nondestructive test methods for concrete bridges: A review. Constr. Build. Mater. 2016, 107, 58–86. [Google Scholar] [CrossRef]
- Doebling, S.W.; Farrar, C.R.; Prime, B.J.S.M. A summary review of vibration-based damage identification methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Sohn, H.; Farrar, C.R.; Hemez, F.M.; Shunk, D.D.; Stinemates, D.W.; Nadler, B.R.; Czarnecki, J.J. A Review of Structural Health Monitoring Literature: 1996–2001; Los Alamos National Laboratory: Los Alamos, NM, USA, 2003. [Google Scholar]
- Arici, Y.; Mosalam, K.M. System identification of instrumented bridge systems. Earthq. Eng. Struct. Dyn. 2003, 32, 999. [Google Scholar]
- Arici, Y.; Mosalam, K.M. Modal identification of bridge systems using state-space methods. Struct. Control Health Monit. 2005, 12, 381. [Google Scholar]
- Arici, Y.; Mosalam, K.M. Statistical significance of modal parameters of bridge systems identified from strong motion data. Earthq. Eng. Struct. Dyn. 2005, 34, 1323. [Google Scholar]
- Pandey, A.K.; Biswas, M.; Samman, M.M. Damage detection from changes in curvature mode shapes. J. Sound Vib. 1991, 145, 321. [Google Scholar]
- Zou, Y.; Tong, L.; Steven, G.P. Vibration-based model-dependent damage (delamination) identification and health monitoring for composite structures—A review. J. Sound Vib. 2000, 230, 357–378. [Google Scholar] [CrossRef]
- Worden, K.; Manson, G.; Fieller, N.R. Damage detection using outlier analysis. J. Sound Vib. 2000, 229, 647. [Google Scholar] [CrossRef]
- Santos, A.; Figueiredo, E.; Silva, M.F.M.; Sales, C.S.; Costa, C.W.A.J. Machine learning algorithms for damage detection: Kernel-based approaches. J. Sound Vib. 2016, 363, 584. [Google Scholar] [CrossRef]
- Santos, A.; Figueiredo, E.; Silva, M.F.M.; Santos, R.; Sales, C.S.; Costa, C.W.A.J. Genetic-based EM algorithm to improve the robustness of Gaussian mixture models for damage detection in bridges. Struct. Control Health Monit. 2017, 24, e1886. [Google Scholar]
- Alves, V.; Cury, A.; Roitman, N.; Magluta, C.; Cremona, C. Structural modification assessment using supervised learning methods applied to vibration data. Eng. Struct. 2015, 99, 439–448. [Google Scholar]
- Abdeljaber, O.; Avci, O.; Kiranyaz, S.; Gabbouj, M.; Inman, D.J. Real-time vibration-based structural damage detection using one-dimensional convolutional neural networks. J. Sound Vib. 2017, 388, 154. [Google Scholar] [CrossRef]
- Sohn, H.; Worden, K.; Farrar, C.R. Statistical damage classification under changing environmental and operational conditions. J. Intell. Mater. Syst. Struct. 2002, 13, 561. [Google Scholar]
- Figueiredo, E.; Park, G.; Farrar, C.R.; Worden, K.; Figueiras, J. Machine learning algorithms for damage detection under operational and environmental variability. Struct. Health Monit. 2011, 10, 559. [Google Scholar] [CrossRef]
- Hsu, T.Y.; Loh, C.H. Damage detection accommodating nonlinear environmental effects by nonlinear principal component analysis. Struct. Control Health Monit. 2010, 17, 338–354. [Google Scholar] [CrossRef]
- Cheung, A.; Cabrera, C.; Sarabandi, P.; Nair, K.K.; Kiremidjian, A.; Wenzel, H. The application of statistical pattern recognition methods for damage detection to field data. Smart Mater. Struct. 2008, 17, 065023. [Google Scholar]
- Sohn, H.; Kim, S.D.; Harries, K. Reference-free damage classification based on cluster analysis. Comput.-Aided Civ. Infrastruct. Eng. 2008, 23, 324. [Google Scholar] [CrossRef]
- Kesavan, K.N.; Kiremidjian, A.S. A wavelet-based damage diagnosis algorithm using principal component analysis. Struct. Control Health Monit. 2012, 19, 672. [Google Scholar]
- Kuok, S.C.; Yuen, K.V. Investigation of modal identification and modal identifiability of a cable-stayed bridge with Bayesian framework. Smart Struct. Syst. 2016, 17, 445–470. [Google Scholar] [CrossRef]
- Mustafa, S.; Debnath, N.; Dutta, A. Bayesian probabilistic approach for model updating and damage detection for a large truss bridge. Int. J. Steel Struct. 2015, 15, 473–485. [Google Scholar] [CrossRef]
- Kim, C.W.; Zhang, Y.; Wang, Z.; Oshima, Y.; Morita, T. Long-term bridge health monitoring and performance assessment based on a Bayesian approach. Struct. Infrastruct. Eng. 2018, 14, 883–894. [Google Scholar] [CrossRef]
- González, M.P.; Zapico, J.L. Seismic damage identification in buildings using neural networks and modal data. Comput. Struct. 2008, 86, 416–426. [Google Scholar] [CrossRef]
- De Lautour, O.R.; Omenzetter, P. Prediction of seismic-induced structural damage using artificial neural networks. Eng. Struct. 2009, 31, 600–606. [Google Scholar] [CrossRef]
- Elwood, E.; Corotis, R.B. Application of fuzzy pattern recognition of seismic damage to concrete structures. ASCE-ASME J. Risk Uncertain. Eng. Syst. Part A Civ. Eng. 2015, 1, 04015011. [Google Scholar]
- Zhang, Y.; Burton, H.V.; Sun, H.; Shokrabadi, M. A machine learning framework for assessing post-earthquake structural safety. Struct. Saf. 2018, 72, 1–16. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. Vibration-based semantic damage segmentation for large-scale structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2020, 35, 579–596. [Google Scholar] [CrossRef]
- Sajedi, S.; Liang, X. Dual Bayesian inference for risk-informed vibration-based damage diagnosis. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 1168–1184. [Google Scholar]
- Sajedi, S.; Liang, X. Deep generative Bayesian optimization for sensor placement in structural health monitoring. Comput.-Aided Civ. Infrastruct. Eng. 2022, 37, 1109–1127. [Google Scholar]
- Sajedi, S.; Liang, X. Filter banks and hybrid deep learning architectures for performance-based seismic assessments of bridges. J. Struct. Eng. 2022, 148, 04022196. [Google Scholar] [CrossRef]
- Rasmussen, C.E.; Williams, C. Gaussian Processes for Machine Learning; MIT Press: Cambridge, MA, USA, 2006. [Google Scholar]
- Muin, S.; Mosalam, K.M. Cumulative Absolute Velocity as a Local Damage Indicator of Instrumented Structures. Earthq. Spectra 2017, 33, 641. [Google Scholar] [CrossRef]
- Sajedi, S.O.; Liang, X. A data-driven framework for near real-time and robust damage diagnosis of building structures. Struct. Control. Health Monit. 2020, 27, e2488. [Google Scholar] [CrossRef]
- Hastie, T.; Tibshirani, R.; Friedman, J. The Elements of Statistical Learning: Data Mining, Inference, and Prediction; Springer: New York, NY, USA, 2009. [Google Scholar]
- Snoek, J.; Larochelle, H.; Adams, R.P. Practical Bayesian Optimization of Machine Learning Algorithms. In Proceedings of the 25th International Conference on Neural Information Processing Systems, Lake Tahoe, NV, USA, 6 December 2012. [Google Scholar]
- Brochu, E.; Cora, V.M.; De Freitas, N. A tutorial on Bayesian optimization of expensive cost functions, with application to active user modeling and hierarchical reinforcement learning. arXiv 2010, arXiv:1012.2599. [Google Scholar]
- Kaviani, P.; Zareian, F.; Taciroglu, E. Seismic Behavior of Reinforced Concrete Bridges with Skew-Angled Seat-Type Abutments. Eng. Struct. 2012, 45, 137. [Google Scholar]
- McKenna, F.; Fenves, G.L.; Filippou, F.C. The Open System for Earthquake Engineering Simulation; University of California: Berkeley, CA, USA, 2010. [Google Scholar]
- Priestley, M.J.N.; Calvi, G.M.; Seible, F. Seismic Design and Retrofit of Bridges; Wiley: New York, NY, USA, 1996. [Google Scholar]
- Aviram, A.; Mackie, K.R.; Stojadinović, B. Guidelines for Nonlinear Analysis of Bridge Structures in California; 2008/03; Pacific Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 2008. [Google Scholar]
- Mander, J.B.; Priestley, M.J.N.; Park, R. Theoretical stress-strain model for confined concrete. J. Struct. Eng. 1988, 114, 1804. [Google Scholar] [CrossRef]
- Filippou, F.C.; Bertero, V.V.; Popov, E.P. Effects of Bond Deterioration on Hysteretic Behavior of Reinforced Concrete Joints; University of California: Berkeley, CA, USA, 1983. [Google Scholar]
- Kaviani, P.; Zareian, F.; Taciroglu, E. Performance-Based Seismic Assessment of Skewed Bridges; 2014/01; Pacific Earthquake Engineering Research Center, University of California: Berkeley, CA, USA, 2014. [Google Scholar]
- Cruz, C.A.; Saiidi, M. Experimental and Analytical Seismic Studies of A Four-Span Bridge System with Innovative Materials; Technical rep no CCEER-10-04; Center for Civil Engineering Earthquake Research: Reno, NV, USA, 2010. [Google Scholar]
- Liang, X.; Mosalam, K.M. Ground motion selection and modification evaluation for highway bridges subjected to Bi-directional horizontal excitation. Soil Dyn. Earthq. Eng. 2020, 130, 105994. [Google Scholar] [CrossRef]
- NGA PEER (Pacific Earthquake Engineering Research Center). PEER NGA Ground Motion Database. 2011. Available online: http://peer.berkeley.edu/nga (accessed on 1 November 2023).
- Campbell, K.W.; Bozorgnia, Y. NGA Ground Motion Model for the Geometric Mean Horizontal Component of PGA, PGV, PGD and 5% Damped Linear Elastic Response Spectra for Periods Ranging from 0.01 to 10 s. Earthq. Spectra 2008, 24, 139. [Google Scholar] [CrossRef]
- Eltouny, K.A.; Liang, X. Bayesian-optimized unsupervised learning approach for structural damage detection. Comput.-Aided Civ. Infrastruct. Eng. 2021, 36, 1249–1269. [Google Scholar]
- Eltouny, K.A.; Liang, X. Large-scale structural health monitoring using composite recurrent neural networks and grid environments. Comput.-Aided Civ. Infrastruct. Eng. 2023, 38, 271–287. [Google Scholar]
- Eltouny, K.; Gomaa, M.; Liang, X. Unsupervised Learning Methods for Data-Driven Vibration-Based Structural Health Monitoring: A Review. Sensors 2023, 23, 3290. [Google Scholar]
- Comon, P. Independent Component Analysis: A New Concept. Signal Process. 1994, 36, 287. [Google Scholar] [CrossRef]
- Wasserman, L. All of Statistics: A Concise Course in Statistical Inference; Springer: New York, NY, USA, 2010. [Google Scholar]
- Hutchinson, T.C.; Chai, Y.H.; Boulanger, R.W. Inelastic seismic response of extended pile-shaft-supported bridge structures. Earthq. Spectra 2004, 20, 1057. [Google Scholar] [CrossRef]
- Gardoni, P.; Mosalam, K.M.; Der Kiureghian, A. Probabilistic seismic demand models and fragility estimates for RC bridges. J. Earthq. Eng. 2003, 7, 79. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bridge | Abutment | Considered | ||
|---|---|---|---|---|
| Existence of Damage | Occurrence of Collapse | Severity of Damage | ||
| A | I | 0.1, 1.0 and 1.5 | 0.1, 0.5 and 1.5 | 0.1, 0.5 and 1.5 |
| II | 0.1, 0.5 and 1.0 | 0.1, 1.5 and 2.0 | 0.2, 1.0 and 1.5 | |
| B | I | 0.2, 1.0 and 1.5 | 0.5, 1.5 and 2.0 | 0.1, 1.0 and 2.0 |
| II | 0.1, 0.2 and 0.5 | 0.5, 1.5 and 2.0 | 0.5, 1.0 and 2.0 | |
| Bridge | Abutment | Existence of Damage | Occurrence of Collapse | Severity of Damage | |||
|---|---|---|---|---|---|---|---|
| A | I | 113.82 | 0.97 | 3.82 | 0.66 | 45.11 | 0.88 |
| 128.88 | 0.63 | ||||||
| 3.91 | 1.00 | ||||||
| II | 234.37 | 1.64 | 38.67 | 2.55 | 250.66 | 2.55 | |
| 736.63 | 0.37 | ||||||
| 32.86 | 1.45 | ||||||
| B | I | 978.48 | 2.55 | 19.69 | 2.28 | 446.32 | 1.51 |
| 154.75 | 3.50 | ||||||
| 263.41 | 4.16 | ||||||
| II | 960.34 | 1.09 | 9.39 | 1.34 | 888.00 | 7.59 | |
| 13.53 | 1.08 | ||||||
| 242.96 | 6.30 | ||||||
| Bridge | Abutment | Existence of Damage | Occurrence of Collapse | Severity of Damage | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Training | CV | Testing | Training | CV | Testing | Training | CV | Testing | ||
| A | I | 99% | 97% | 98% | 99% | 98% | 99% | 99% | 96% | 97% |
| II | 97% | 95% | 95% | 99% | 97% | 98% | 99% | 92% | 93% | |
| B | I | 98% | 95% | 96% | 99% | 96% | 96% | 98% | 92% | 92% |
| II | 96% | 93% | 93% | 99% | 94% | 95% | 97% | 87% | 88% | |
| Scenario | Existence of Damage | Occurrence of Collapse | Severity of Damage | ||||
|---|---|---|---|---|---|---|---|
| Bayesian Optimization | No | Yes | No | Yes | No | Yes | |
| Bridge A | Type I | 73% | 98% | 76% | 99% | 61% | 97% |
| Type II | 80% | 95% | 75% | 98% | 62% | 93% | |
| Bridge B | Type I | 64% | 96% | 76% | 96% | 63% | 92% |
| Type II | 67% | 93% | 77% | 95% | 63% | 88% | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liang, X. Enhancing Seismic Damage Detection and Assessment in Highway Bridge Systems: A Pattern Recognition Approach with Bayesian Optimization. Sensors 2024, 24, 611. https://doi.org/10.3390/s24020611
Liang X. Enhancing Seismic Damage Detection and Assessment in Highway Bridge Systems: A Pattern Recognition Approach with Bayesian Optimization. Sensors. 2024; 24(2):611. https://doi.org/10.3390/s24020611
Chicago/Turabian StyleLiang, Xiao. 2024. "Enhancing Seismic Damage Detection and Assessment in Highway Bridge Systems: A Pattern Recognition Approach with Bayesian Optimization" Sensors 24, no. 2: 611. https://doi.org/10.3390/s24020611