



Enhancing the Performance of a Large Aperture Ultrasound System (LAUS): A Combined Approach of Simulation and Measurement for Transmitter–Receiver Optimization

Abstract
:1. Introduction
2. Methods
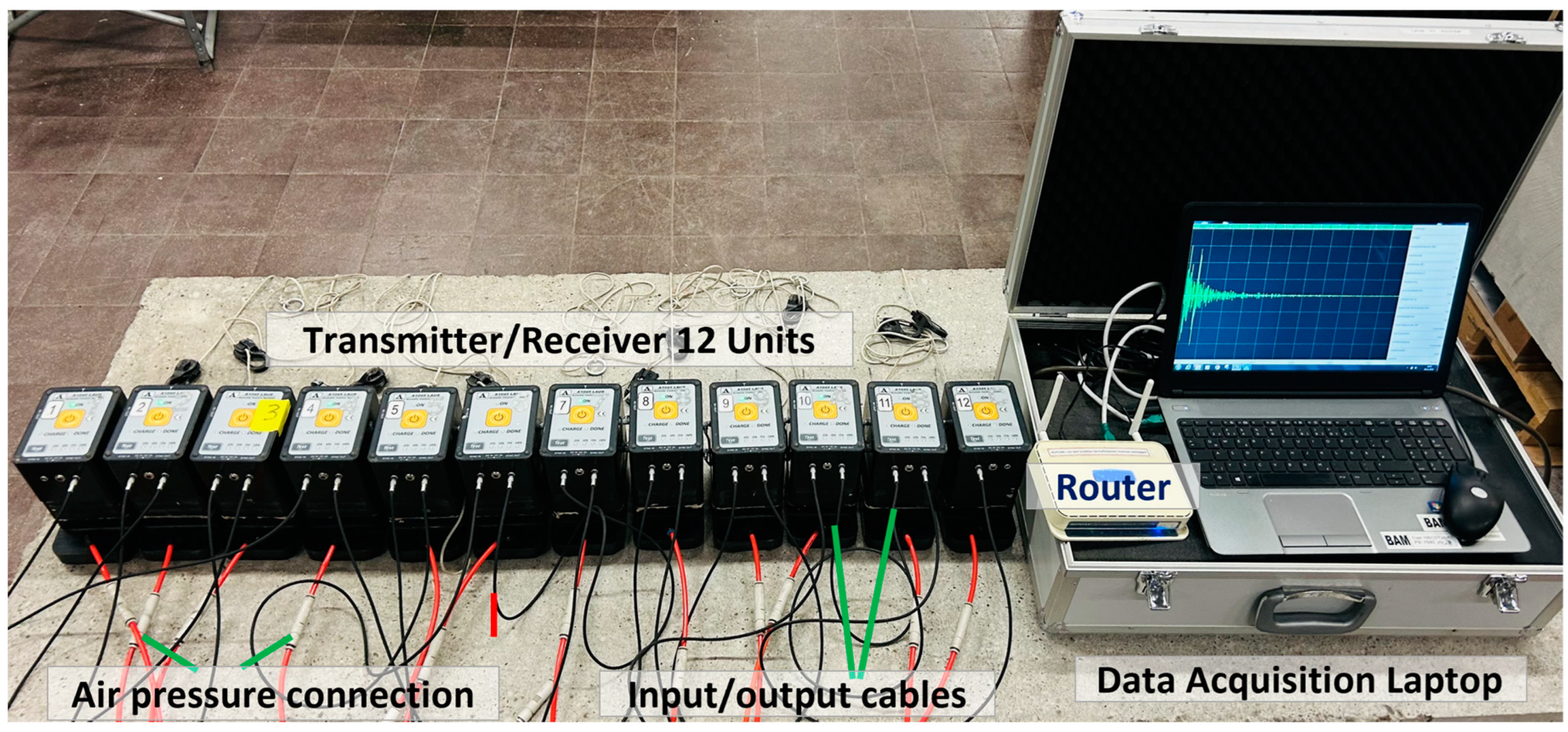
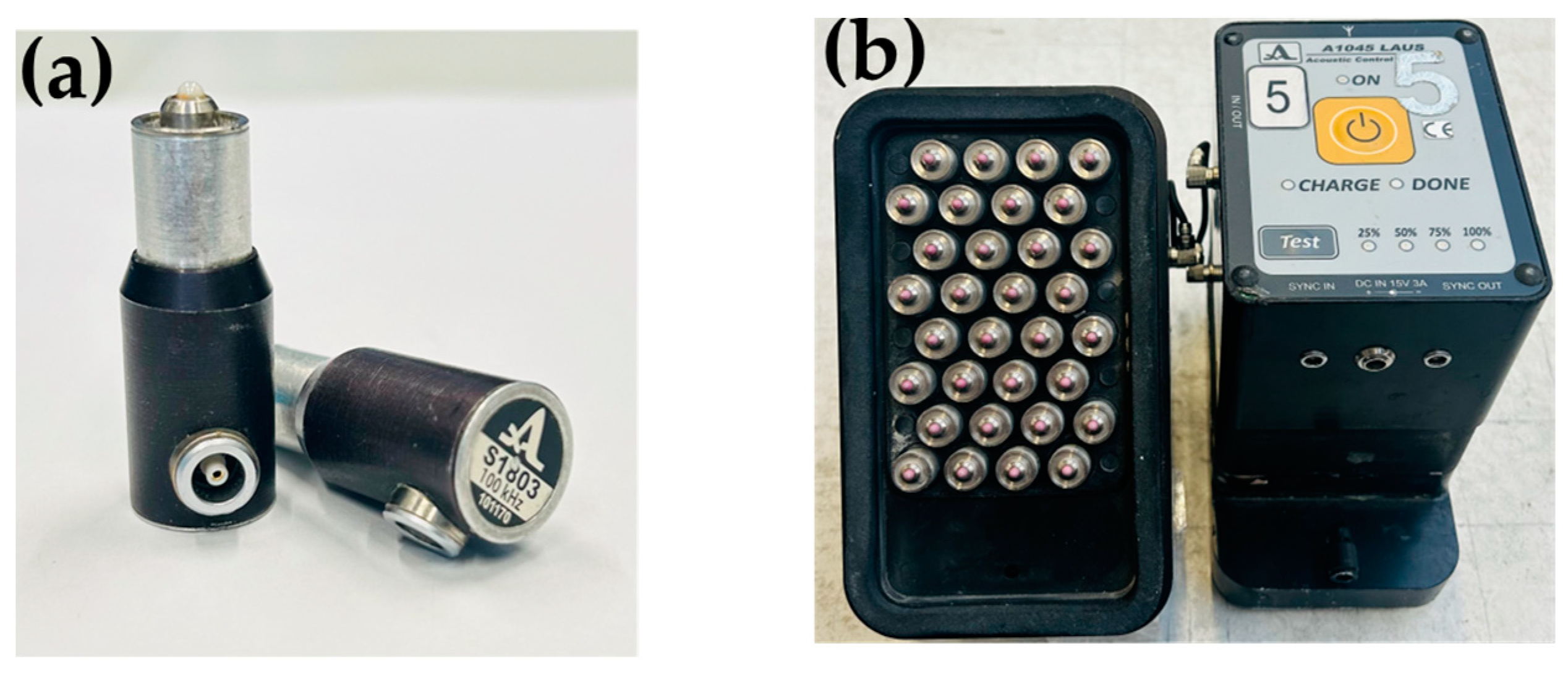
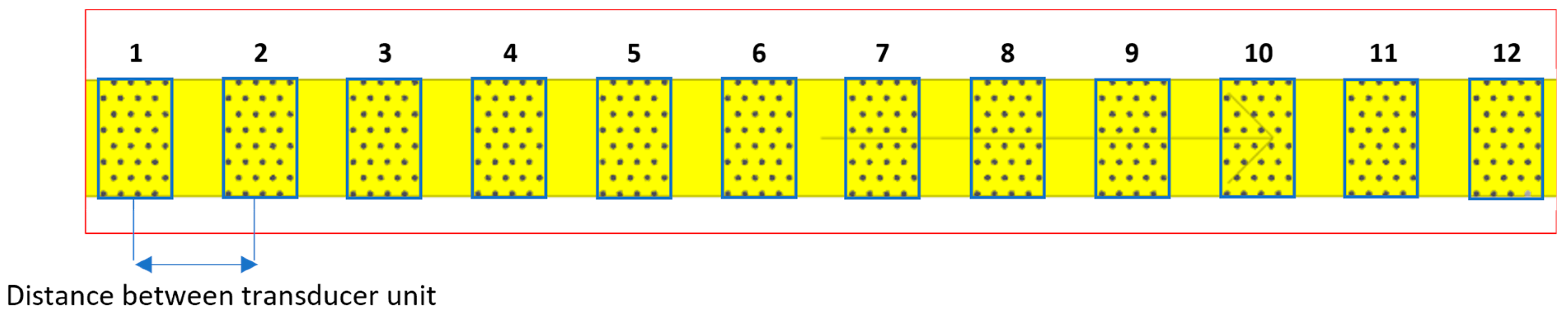
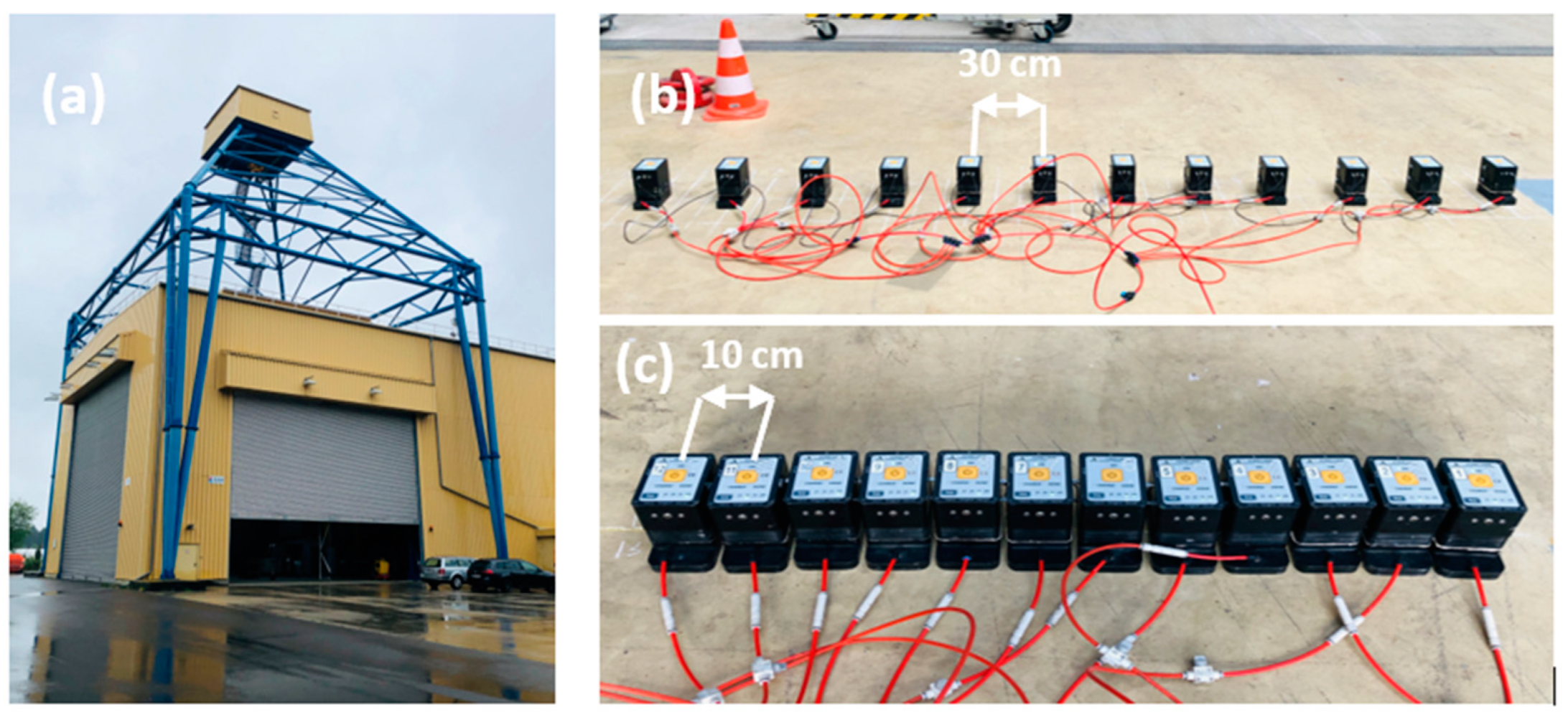
2.1. Large Aperture Ultrasound System (LAUS)
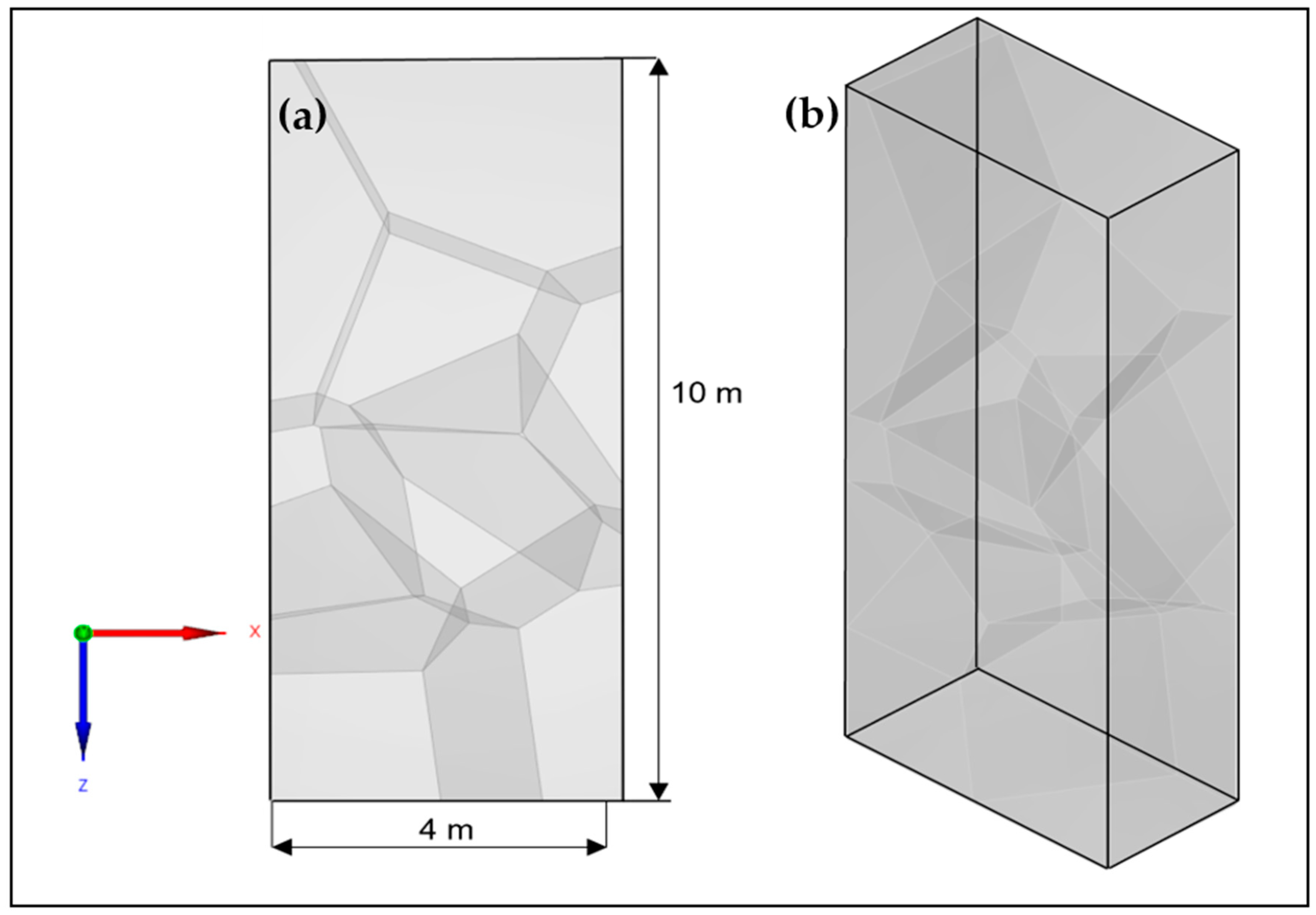
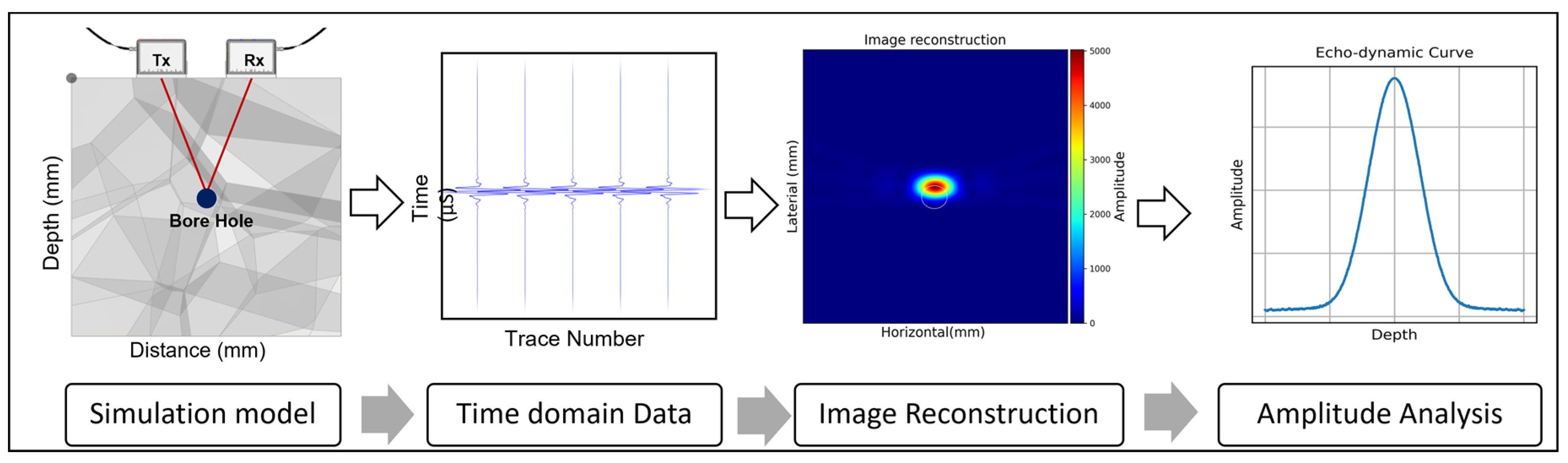
2.2. Simulation
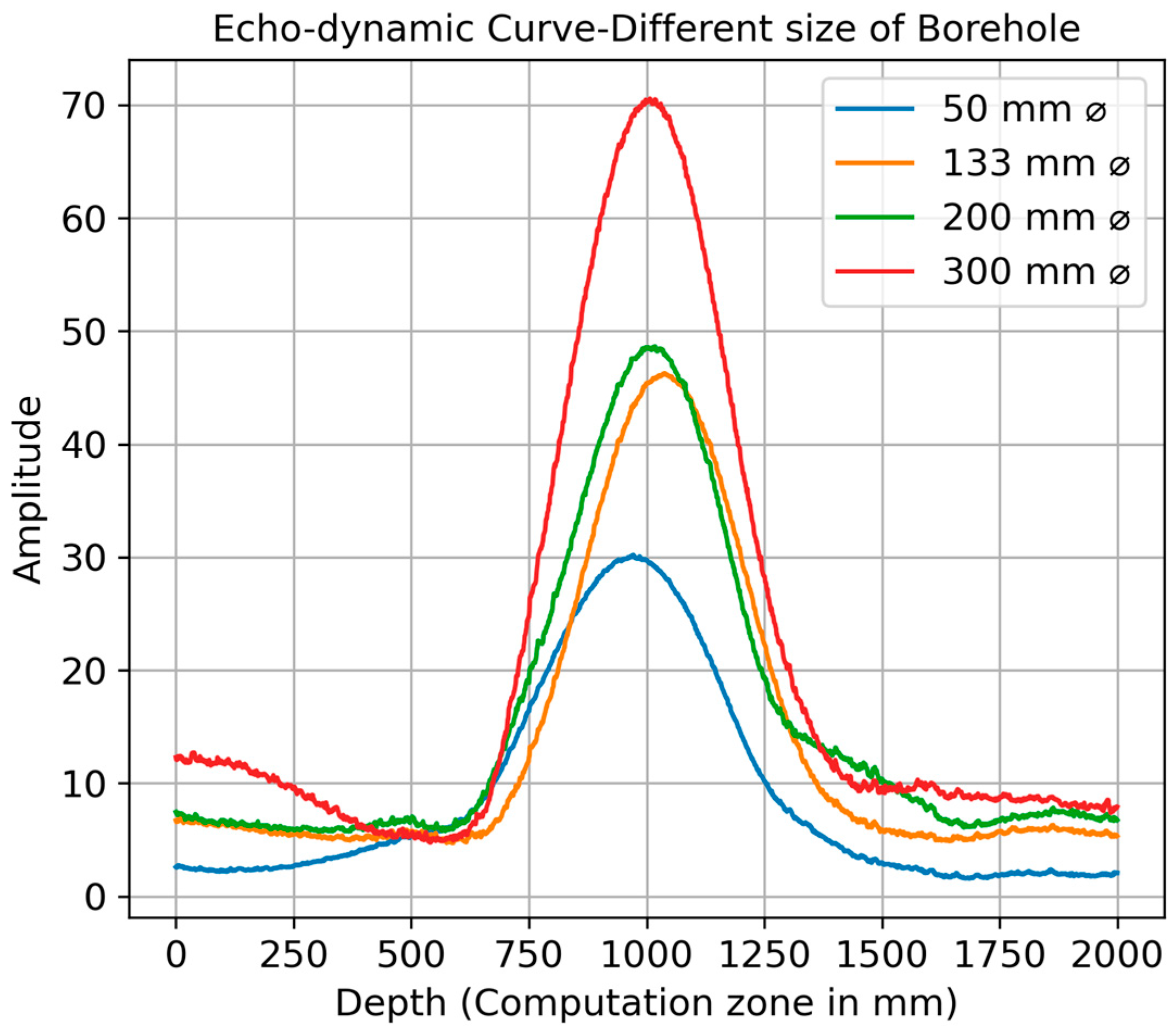
- Retaining a consistent spacing between units while varying the diameter of the borehole to assess the impact of hole size on the results.
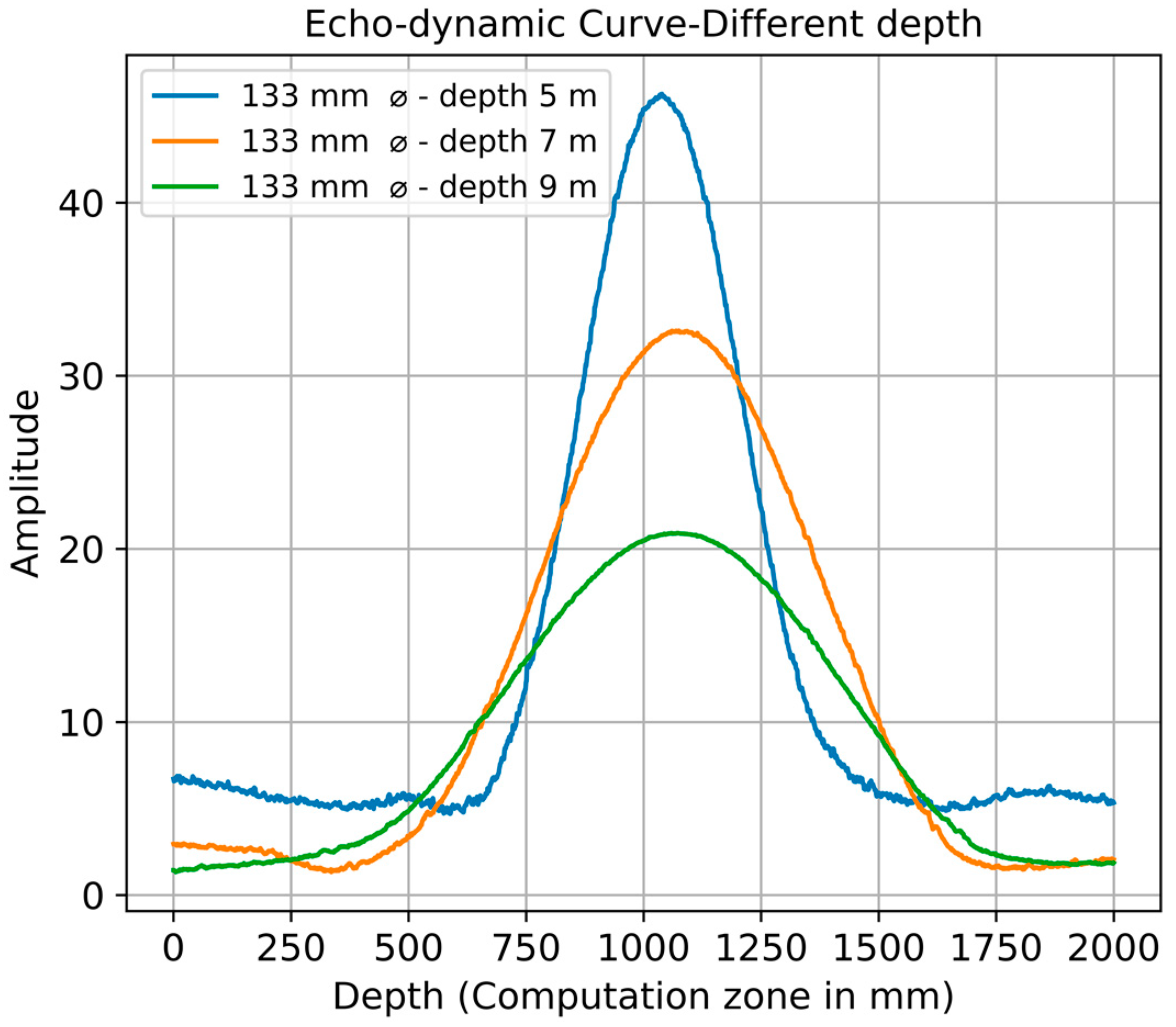
- Maintaining both the inter-unit spacing and the reference borehole’s size constant but adjusting the borehole depth to determine its influence on the readings.
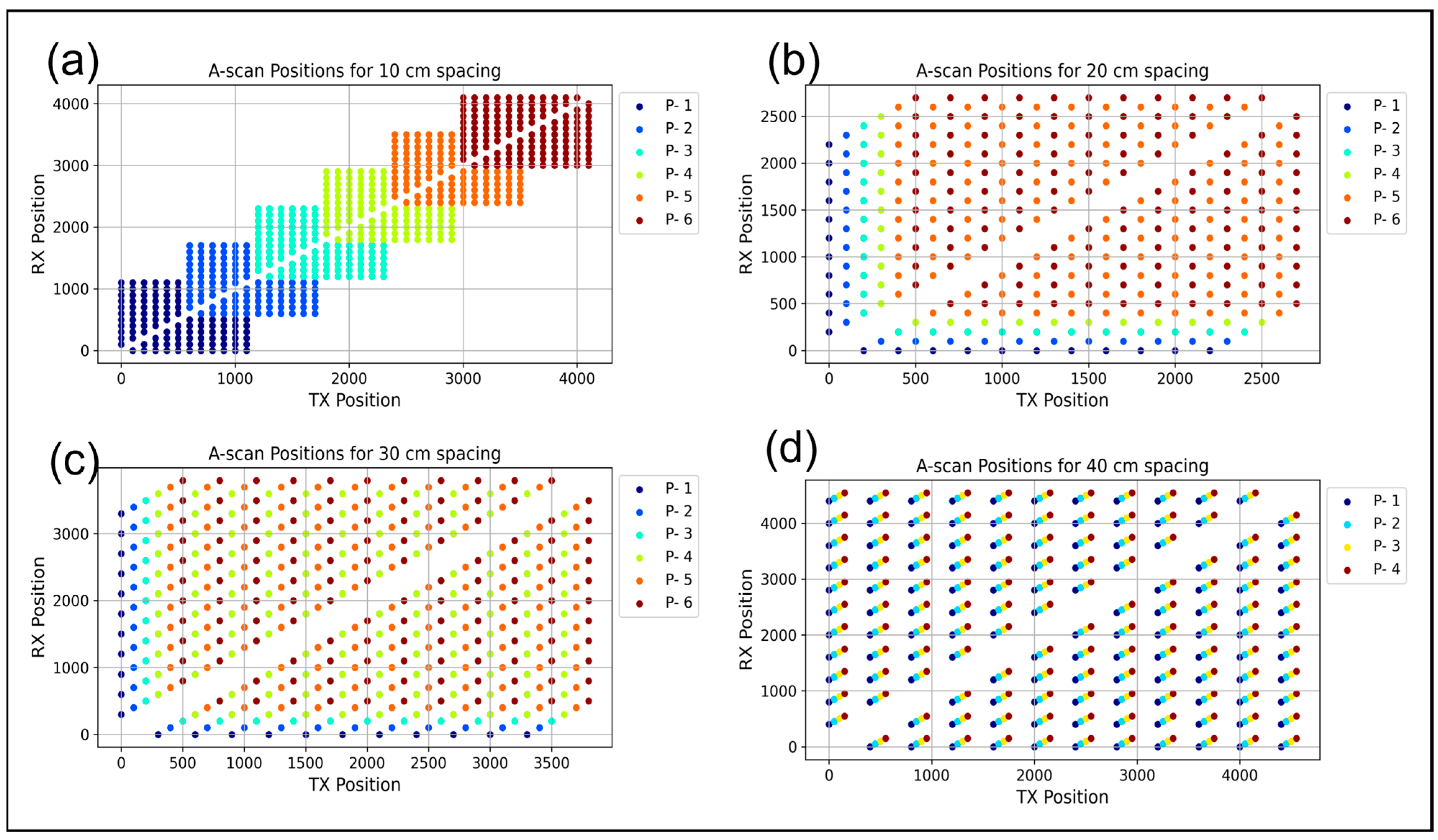
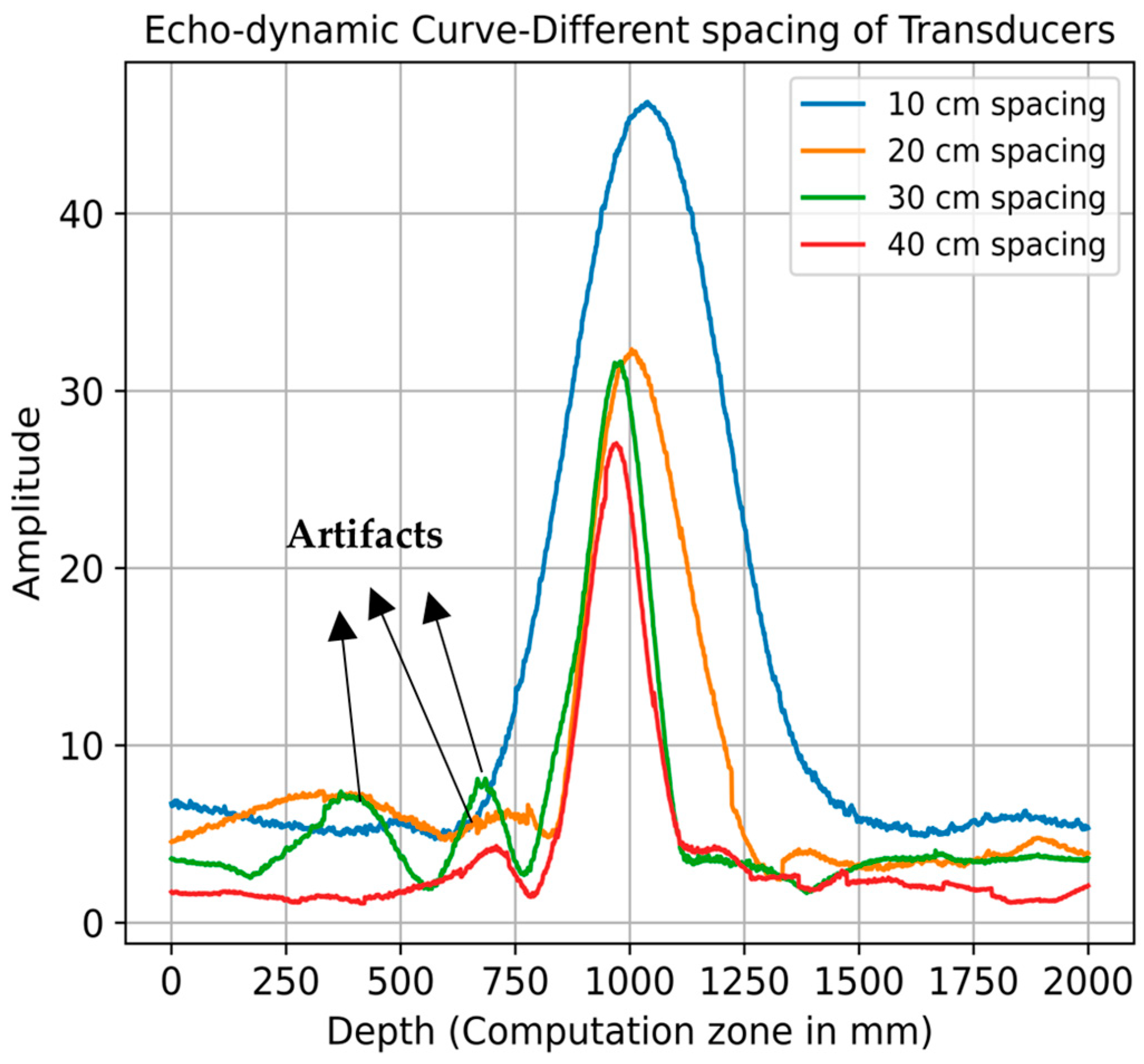
- Keeping the depth and diameter of the borehole unchanged, the spacing between each unit was altered, ranging from 10 cm to 40 cm. This was performed to observe the effects of varying unit distances on the simulation output.
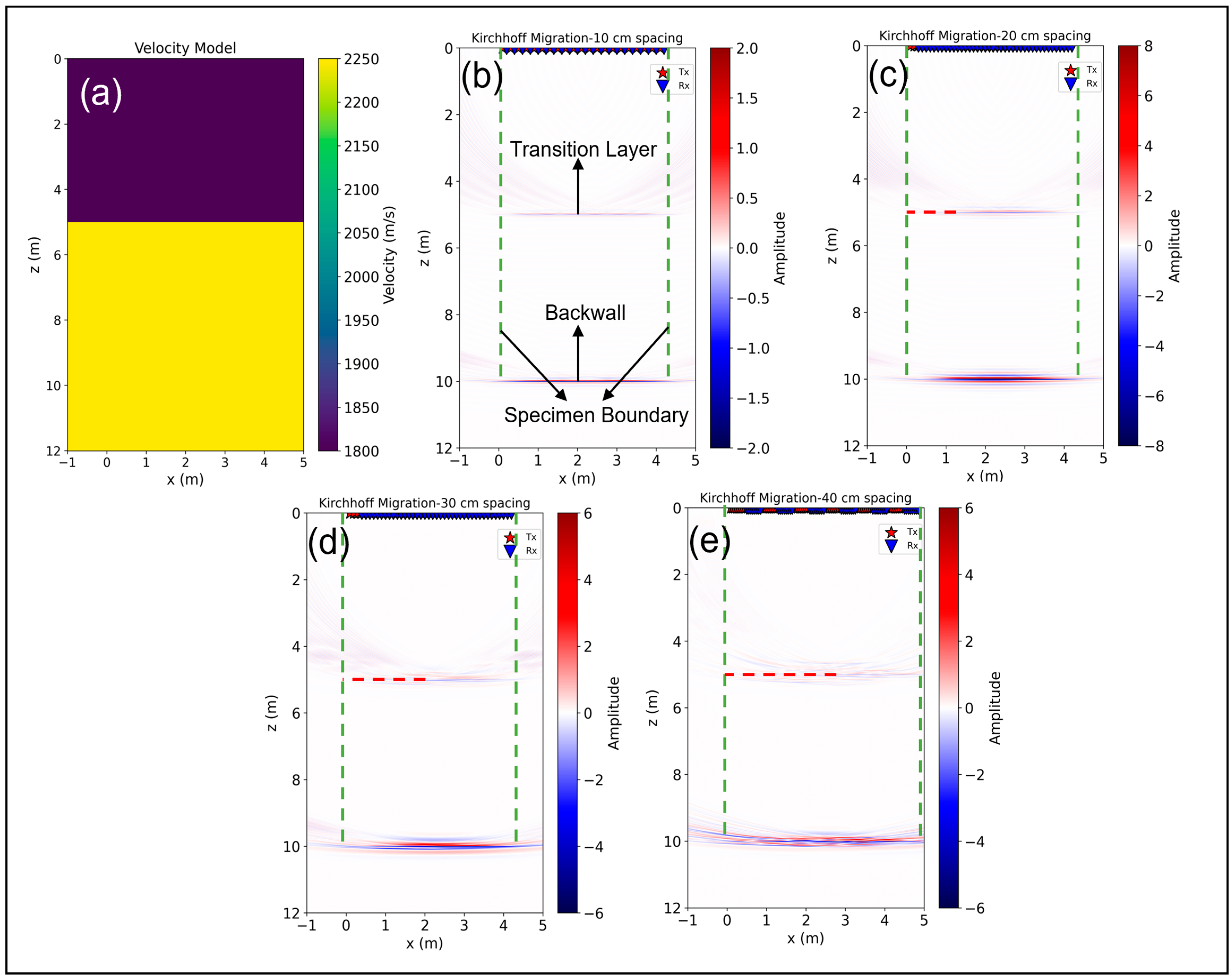
- Employing a model that incorporated two different material layers and examining the results for different unit spacings.
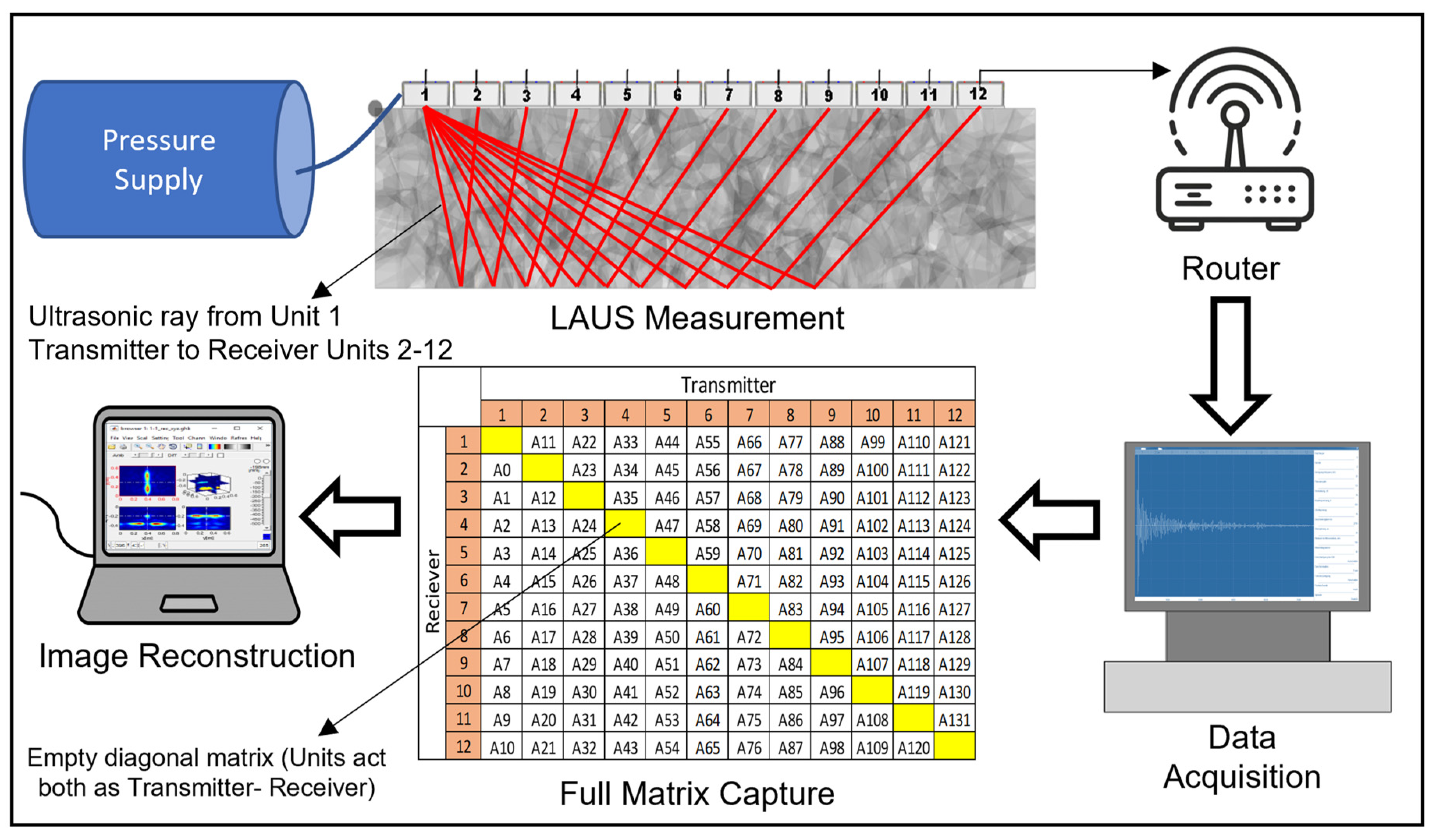
2.3. Measurement and Analysis
2.4. Data Pre-Processing and Image Reconstruction
- Singular Value Decomposition (SVD) deconvolution: SVD is a powerful tool in linear algebra and signal processing that is used for various purposes including noise reduction, data compression, and system identification. In the context of seismic data processing, SVD can be employed to enhance the signal-to-noise ratio and to deconvolve the seismic signal. SVD is a factorization of a real or complex matrix. For a given matrix A of dimensions m × n, SVD decomposes A into three other matrices [28,32,33,34].where U is an m × m unitary matrix, indicating the left singular vectors of A. is an m × n diagonal matrix with non-negative real numbers (singular values) on the diagonal, and V* is the conjugate transpose of an n × n unitary matrix, representing the right singular vectors of A.
- 3.
- Signal amplitude compensation: As ultrasonic waves propagate through a medium, their energy decreases due to factors such as absorption, scattering, and mode conversion. This attenuation can vary depending on the properties of the medium and the distance the wave has travelled. Compensation techniques are essential for maintaining the clarity and consistency of received signals, especially when analyzing reflections from different depths.
- 4.
- Kirchhoff migration: Reconstruction is an important technique in ultrasound imaging for converting reflected ultrasound signals from the time domain and assigning these reflections precisely to the corresponding physical locations [2,5]. Among the numerous reconstruction methods available, the Kirchhoff technique is characterized by the use of Two-Way Time (TWT) isochrones or can be seen as a diffraction summation based on the principle of superposition and Huygens’s principle [27,35,36,37,38,39]. Underlying Kirchhoff migration is the notion that each subsurface point interacts with multiple near-surface observation points. Conversely, the recorded signal of each of these surface receiver points is influenced by numerous visual points in the subsurface or concrete structure. According to [31,38,40], Kirchhoff migration in a 2D space can be represented mathematically as:where denotes the intensity of the migrated image I at specified spatial coordinates, with x representing the horizontal and z the vertical axis; is the recorded seismic or ultrasonic signal amplitude for a source at , a receiver at , and travel time T; is the travel time from the source to the image point and back to the receiver, calculated based on the distances and the velocity of the medium; and ) is the weighting function calculated based on the obliquity factor [41,42] where θ represents the angle of incidence of the wave front with respect to the normal of the reflector. The intensity of reflections in ultrasound imaging depends on the angle of incidence. Perpendicular incidences (i.e., θ = 0⁰) give the maximum reflection intensity. When the angle deviates from this perpendicular orientation, the reflection intensity becomes weaker, so a compensation factor is required to ensure an accurate representation in the resulting image concerning reflection intensity.
3. Results and Discussion
3.1. Simulation
3.1.1. Varying the Depth of the Borehole
3.1.2. Varying Borehole Size
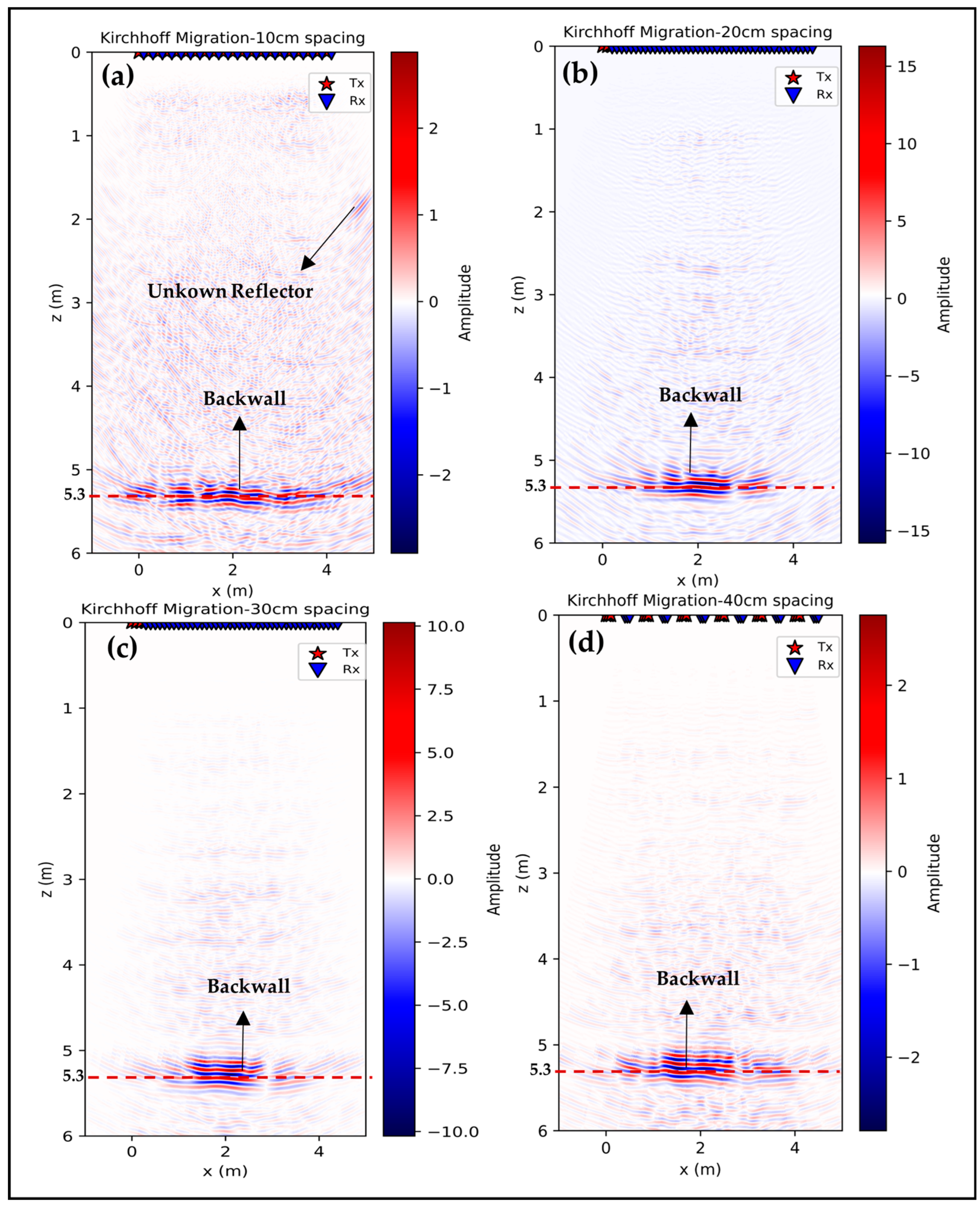
3.1.3. Variation in Transmitter and Receiver Spacing
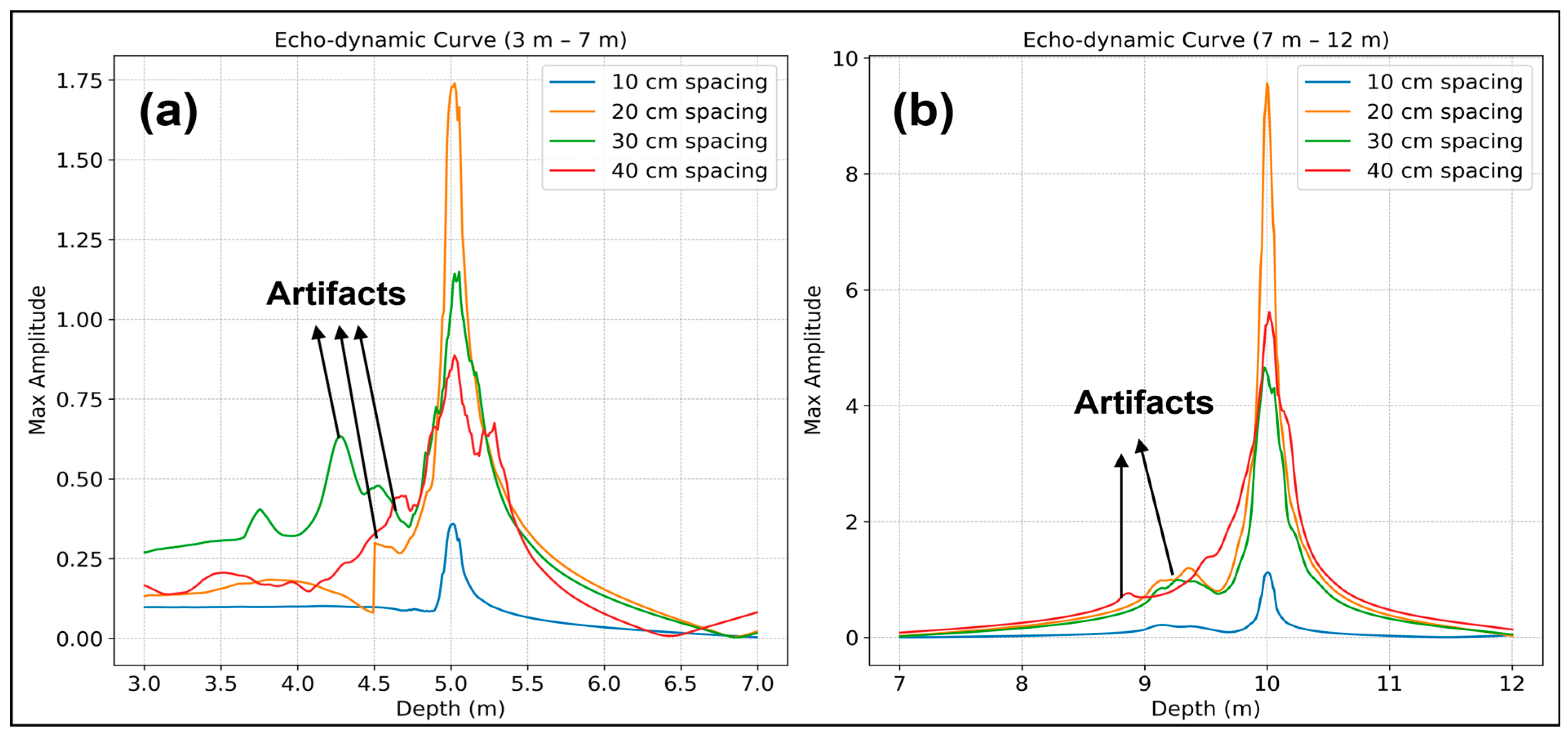
3.1.4. Investigation of a Two-Layer Material Model with Varied Unit Spacings
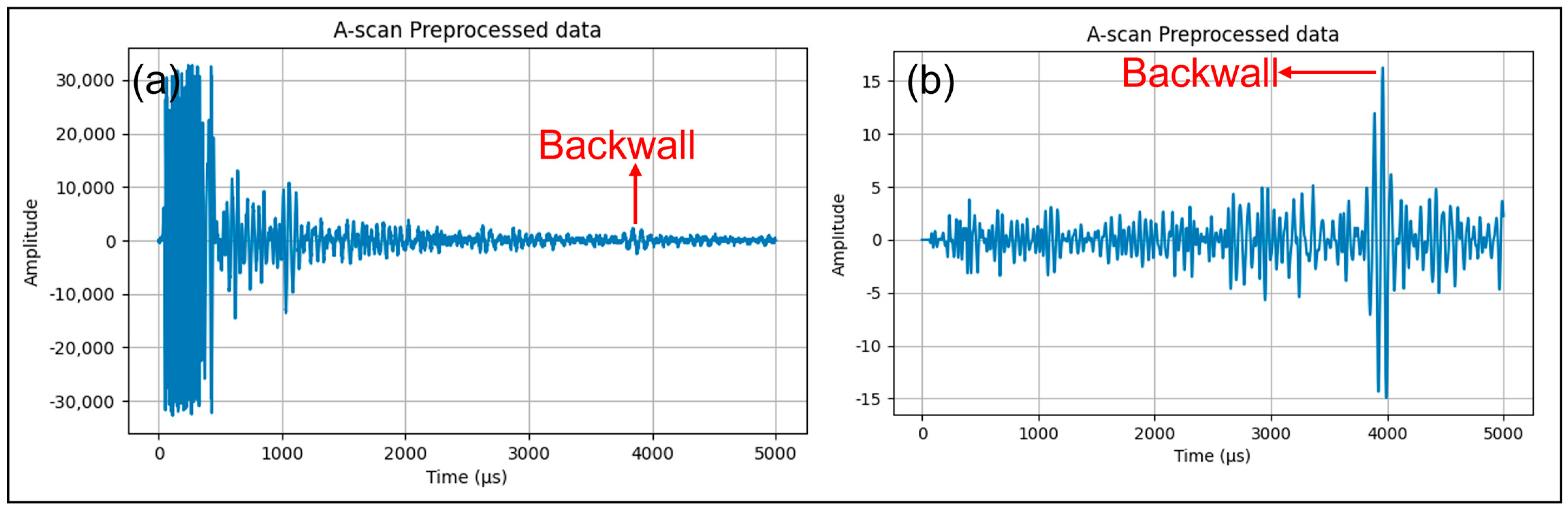
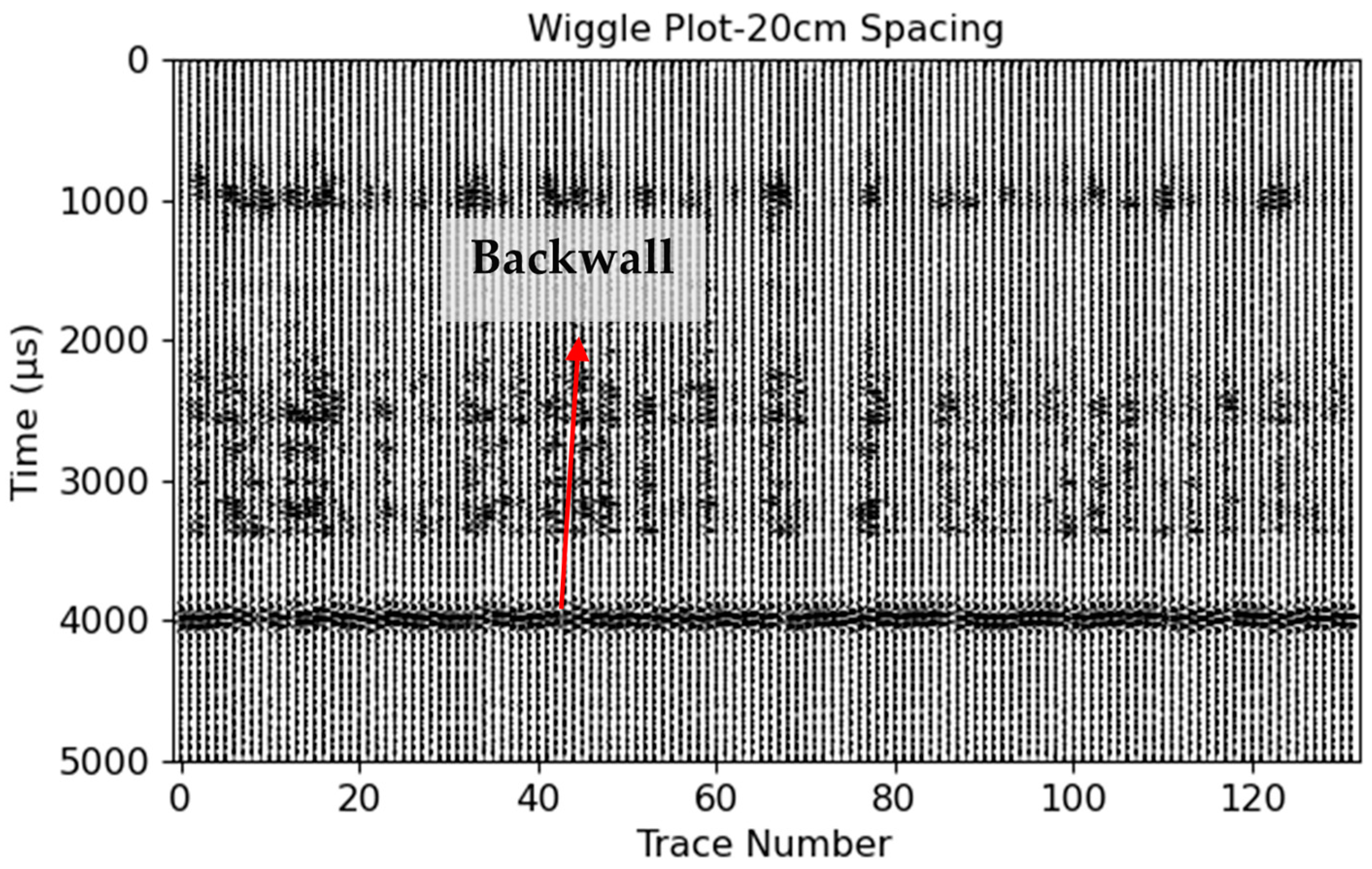
3.2. Measurement
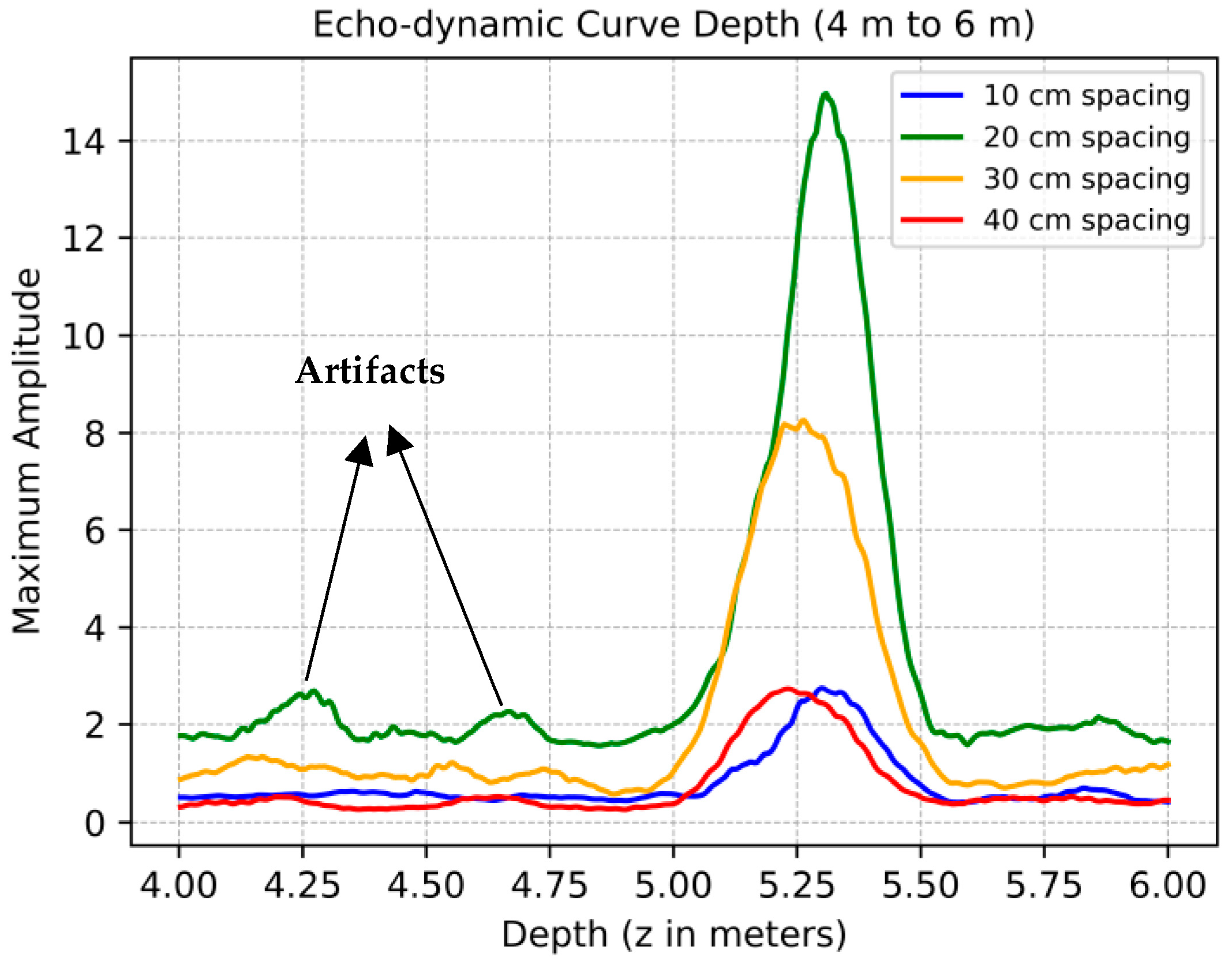
3.3. Data Analysis of Migration Data
4. Discussion
4.1. Impact of Borehole Depth and Size
4.2. Transducer Spacing
4.3. Data Analysis Insights
4.4. Comparative to Previous Studies
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. Pre-Processing Parameters to Enhance Backwall Reflection Signal

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Pre-Processing Step | Description | Value |
|---|---|---|---|
| Lowcut-1, Highcut-1 | Bandpass Filter 1 | cut-off frequencies for first bandpass filter | 5 k Hz to 70 kHz |
| Lowcut-2, Highcut-2 | Bandpass Filter 1 | cut-off frequencies for second bandpass filter | 10 k Hz to 40 kHz |
| Fs | Bandpass Filter 1, 2 | Sampling frequency | 1 M Hz |
| Window length before | Automatic Gain Control | Window length before reflection sample for AGC | 1024 µs |
| Window length after | Automatic Gain Control | Window length after reflection sample for AGC | 4096 µs |
| Start gain, End gain | Time-Varying Gain | Initial gain and Final gain for time-varying gain (TVG) | 0 dB, 20 dB |
| Start time–end time | Time-Varying Gain | Start and end time in TVG | 0–5000 µs |
| SVD threshold | SVD Deconvolution | Threshold for singular value decomposition (0 to 1 normalization) | 0.5 |
| Window size | SVD Deconvolution | Size of window for windowed SVD deconvolution | 512 µs |
References
- Maierhofer, C.; Krause, M.; Wiggenhauser, H. Non-destructive investigation of sluices using radar and ultrasonic impulse echo. NDT E Int. 1998, 31, 421–427. [Google Scholar] [CrossRef]
- Krautkramer, J.; Krautkramer, H. Ultrasonic Testing of Materials; Springer: Berlin/Heidelberg, Germany; New York, NY, USA, 2009. [Google Scholar]
- Langenberg, K.-J.; Marklein, R.; Mayer, K. Ultrasonic Nondestructive Testing of Materials: Theoretical Foundation; CRC Press Taylor & Francis Group: Boca Raton, FL, USA, 2012. [Google Scholar]
- Krause, M.; Wiggenhauser, H. Ultrasonic Pulse Echo Technique For Concrete Elements Using Synthetic Aperture. In Proceedings of the Non-Destructive Testing in Civil Engineering (Proceedings), Liverpool, UK, 8–11 April 1997; pp. 135–142. [Google Scholar]
- Schickert, M.; Krause, M.; Müller, W. Ultrasonic Imaging of Concrete Elements Using Reconstruction by Synthetic Aperture Focusing Technique. J. Mater. Civ. Eng. 2003, 15, 235–246. [Google Scholar] [CrossRef]
- Mayer, K.; Langenberg, K.-J.; Krause, M.; Milmann, B.; Mielentz, F. Characterization of Reflector Types by Phase-Sensitive Ultrasonic Data Processing and Imaging. J. Nondestruct. Eval. 2008, 27, 35–45. [Google Scholar] [CrossRef]
- Mayer, K.; Krause, M.; Wiggenhauser, H.; Millmann, B. Investigations for the Improvement of the SAFT Imaging Quality of a Large Aperture Ultrasonic System. In Proceedings of the International Symposium Non-Destructive Testing in Civil Engineering (NDT-CE), Berlin, Germany, 15–17 September 2015. [Google Scholar]
- DIN EN 12504-4; Prüfung von Beton in Bauwerken. Teil 4, Bestimmung der Ultraschall-Impulsgeschwindigkeit: Testing Concrete in Structures. Part 4, Determination of Ultrasonic Pulse Velocity. Beuth Verlag: Berlin, Germany, 2021. [CrossRef]
- ASTM-C597-22; Standard Test Method for Ultrasonic Pulse Velocity Through Concrete. ASTM: West Conshohocken, PA, USA, 2023. [CrossRef]
- RILEM Technical Committee. Non-Destructive Assessment of Concrete Structures: Reliability and Limits of Single and Combined Techniques; State-of-the-Art Report; Breysse, D., Ed.; Springer: Dordrecht, The Netherlands, 2012; p. 374. [Google Scholar]
- Epple, N.; Sanchez-Trujillo, C.A.; Niederleithinger, E. Ultrasonic Monitoring of Large-Scale Structures—Input to Engineering Assessment; CRC: Boca Raton, FL, USA, 2023; pp. 1805–1812. [Google Scholar]
- Wiggenhauser, H.; Samokrutov, A.; Mayer, K.; Krause, M.; Alekhin, S.; Elkin, V. Large Aperture Ultrasonic System for Testing Thick Concrete Structures. J. Infrastruct. Syst. 2017, 23, B4016004. [Google Scholar] [CrossRef]
- Prabhakara, P.; Mielentz, F.; Stolpe, H.; Behrens, M.; Lay, V.; Niederleithinger, E. Validation of Novel Ultrasonic Phased Array Borehole Probe by Using Simulation and Measurement. Sensors 2022, 22, 9823. [Google Scholar] [CrossRef] [PubMed]
- Bundesamt für Strahlenschutz. Endlager Morsleben: Hintergründe, Maßnahmen und Perspektiven der Stilllegung; Bundesamt für Strahlenschutz: Salzgitter, Germany, 2015. [Google Scholar]
- Lay, V.; Baensch, F.; Johann, S.; Sturm, P.; Mielentz, F.; Prabhakara, P.; Hofmann, D.; Niederleithinger, E.; Kühne, H.C. SealWasteSafe: Materials technology, monitoring techniques, and quality assurance for safe sealing structures in underground repositories. Saf. Nucl. Waste Disposal 2021, 1, 127–128. [Google Scholar] [CrossRef]
- Effner, U.; Mielentz, F.; Niederleithinger, E.; Friedrich, C.; Mauke, R.; Mayer, K. Testing repository engineered barrier systems for cracks—A challenge. Mater. Werkst. 2021, 52, 19–31. [Google Scholar] [CrossRef]
- Lay, V.; Effner, U.; Niederleithinger, E.; Arendt, J.; Hofmann, M.; Kudla, W. Ultrasonic Quality Assurance at Magnesia Shotcrete Sealing Structures. Sensors 2022, 22, 8717. [Google Scholar] [CrossRef]
- Büttner, C.; Niederleithinger, E.; Buske, S.; Friedrich, C. Ultrasonic Echo Localization Using Seismic Migration Techniques in Engineered Barriers for Nuclear Waste Storage. J. Nondestruct. Eval. 2021, 40, 99. [Google Scholar] [CrossRef]
- Spitzer, R.; Nitsche, F.O.; Green, A.G.; Horstmeyer, H. Efficient acquisition, processing, and interpretation strategy for shallow 3D seismic surveying: A Case Study. Geophysics 2003, 68, 1792–1806. [Google Scholar] [CrossRef]
- Sloan, S.; Steeples, D.; Tsoflias, G. Ultra-shallow imaging using 3D seismic-reflection methods. Near Surf. Geophys. 2009, 7, 307–314. [Google Scholar] [CrossRef]
- Maurer, H.; Curtis, A.; Boerner, D.E. Recent advances in optimized geophysical survey design. Geophysics 2010, 75, 75A177–175A194. [Google Scholar] [CrossRef]
- Kak, A.C.; Slaney, M. Principles of Computerized Tomographic Imaging; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 2001. [Google Scholar]
- Gonzalez, R.C.; Woods, R.E. Digital Image Processing; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Tränkler, H.-R.; Reindl, L. Sensortechnik: Handbuch für Praxis und Wissenschaft; Springer: Berlin/Heidelberg, Germany, 2014. [Google Scholar] [CrossRef]
- Maack, S. Untersuchungen zum Schallfeld Niederfrequenter Ultraschallprüfköpfe für die Anwendung im Bauwesen; BAM-Dissertationsreihe; Band 95; Federal Institute for Materials Research and Testing: Berlin, Germany, 2012; pp. 28–40. [Google Scholar]
- Buske, S.; Gutjahr, S.; Sick, C. Fresnel volume migration of single-component seismic data. Geophysics 2009, 74, WCA47–WCA55. [Google Scholar] [CrossRef]
- Buske, S. Three-dimensional pre-stack Kirchhoff migration of deep seismic reflection data. Geophys. J. Int. 1999, 137, 243–260. [Google Scholar] [CrossRef]
- Taheri, H.; Ladd, K.M.; Delfanian, F.; Du, J. Phased Array Ultrasonic Technique Parametric Evaluation for Composite Materials. In Proceedings of the ASME 2014 International Mechanical Engineering Congress and Exposition, Montreal, QC, Canada, 14–20 November 2014. [Google Scholar]
- Calmon, P.; Mahaut, S.; Chatillon, S.; Raillon, R. CIVA: An expertise platform for simulation and processing NDT data. Ultrasonics 2007, 44 (Suppl. S1), e975–e979. [Google Scholar] [CrossRef] [PubMed]
- Dubois, P.; Lonné, S.; Jenson, F.; Mahaut, S. Simulation of Ultrasonic, Eddy Current and Radiographic Techniques within the CIVA Software Platform. In Proceedings of the 10th European Conference on Non-Destructive Testing, Moscow, Russia, 7–11 June 2010. [Google Scholar]
- Yilmaz, O. Seismic Data Analysis: Processing, Inversion, and Interpretation of Seismic Data (Volume 1); Society of Exploration Geophysics: Tulsa, OK, USA, 2001; Volume 1. [Google Scholar]
- Abood, S. Digital Signal Processing (Primer with Matlab); CRC Press: Boca Raton, FL, USA, 2020; 338p. [Google Scholar] [CrossRef]
- Camina, A.R.; Janacek, G.J. Mathematics for Seismic Data Processing and Interpretation; Springer: Dordrecht, The Netherlands; London, UK, 1984; p. 255. [Google Scholar]
- Jones, I. Tutorial: Migration imaging conditions. First Break 2014, 32. [Google Scholar] [CrossRef]
- Hill, S.; Rüger, A. Illustrated Seismic Processing; Imaging; Society of Exploration Geophysicists: Houston, TX, USA, 2019; Volume 1. [Google Scholar]
- Büttner, C. Application of Seismic Imaging Methods to Ultrasonic Echo Data from Underground Sealing Constructions. Master’s Thesis, Institut für Geophysik und Geoinformatik, Freiberg, Germany, 2019. [Google Scholar]
- Gray, S.; Etgen, J.; Dellinger, J.; Whitmore, D. Seismic migration problems and solutions. Geophysics 2001, 66, 1622–1640. [Google Scholar] [CrossRef]
- Schneider, W. Integral Formulation for Migration in Two and Three Dimensions. Geophysics 1978, 43, 49–76. [Google Scholar] [CrossRef]
- Schleicher, J.; Tygel, M.; Hubral, P. Seismic True Amplitude Imaging; Society of Exploration Geophysicists: Houston, TX, USA, 2007; 401p. [Google Scholar] [CrossRef]
- Claerbout, J.F. Earth Soundings Analysis: Processing Versus Inversion; Blackwell Scientific Publications: Boston, MA, USA, 1992. [Google Scholar]
- Silva, R. Antialiasing and application of weighting factors in Kirchhoff migration. In SEG Technical Program Expanded Abstracts; Society of Exploration Geophysicists: Houston, TX, USA, 1992; pp. 995–998. [Google Scholar]
- Schuster, K.; Amann, F.; Yong, S.; Bossart, P.; Connolly, P. High-resolution mini-seismic methods applied in the Mont Terri rock laboratory (Switzerland). Swiss J. Geosci. Suppl. 2017, 5, 213–230. [Google Scholar] [CrossRef]
- Eaglekumar, G.T.; PATANKAR, V. SNR Enhancement of Ultrasonic Pulse-Echo Signals using 1-D Anisotropic Diffusion Filter. In Proceedings of the NDE 2018, Mumbai, India, 19–21 December 2018. [Google Scholar]
- Roach, D.P.; Walkington, P.D.; Rackow, K.A. Pulse-Echo Ultrasonic Inspection System for In-Situ Nondestructive Inspection of Space Shuttle RCC Heat Shields; SAND2005-3429; Sandia National Laboratories: Albuquerque, NM, USA, 2005. [Google Scholar]
- Xu, W.; Li, X.; Zhang, J.; Xue, Z.; Cao, J. Ultrasonic Signal Enhancement for Coarse Grain Materials by Machine Learning Analysis. Ultrasonics 2021, 117, 106550. [Google Scholar] [CrossRef]
- Nuber, A.; Manukyan, E.; Maurer, H. Optimizing measurement geometry for seismic near-surface full waveform inversion. Geophys. J. Int. 2017, 210, 1909–1921. [Google Scholar] [CrossRef]
- Hloušek, F.; Hellwig, O.; Buske, S. Improved structural characterization of the Earth’s crust at the German Continental Deep Drilling Site using advanced seismic imaging techniques. J. Geophys. Res. Solid Earth 2015, 120, 6943–6959. [Google Scholar] [CrossRef]
- Grohmann, M.; Niederleithinger, E.; Maack, S.; Buske, S. Application of Iterative Elastic SH Reverse Time Migration to Synthetic Ultrasonic Echo Data. J. Nondestruct. Eval. 2023, 43, 1. [Google Scholar] [CrossRef]



















| Measurement | ||
|---|---|---|
| Configuration No. | Spacing in cm | Position Offset in cm |
| 1 | 10 | 60 |
| 2 | 20 | 10 |
| 3 | 30 | 10 |
| 4 | 40 | 5 |
| Depth Range | Spacing between Units (cm) | SNR (dB) Half Array Offset | SNR (dB) Full Data |
|---|---|---|---|
| Transition layer (5 m) | 10 | 12.26 | 12.26 |
| 20 | 5.29 | 9.20 | |
| 30 | 3.55 | 6.08 | |
| 40 | 2.99 | 4.07 | |
| Backwall (10 m) | 10 | 7.29 | 7.29 |
| 20 | 8.78 | 15.84 | |
| 30 | 7.74 | 12.14 | |
| 40 | 7.56 | 13.06 |
| Spacing | Peak Depth (m) | Peak Amplitude | Standard Deviation | SNR (dB) |
|---|---|---|---|---|
| 10 cm | 5.305 | 2.210 | 0.200 | 16.40 |
| 20 cm | 5.304 | 11.470 | 0.883 | 15.48 |
| 30 cm | 5.264 | 7.220 | 0.503 | 14.16 |
| 40 cm | 5.259 | 2.382 | 0.160 | 13.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Prabhakara, P.; Lay, V.; Mielentz, F.; Niederleithinger, E.; Behrens, M. Enhancing the Performance of a Large Aperture Ultrasound System (LAUS): A Combined Approach of Simulation and Measurement for Transmitter–Receiver Optimization. Sensors 2024, 24, 100. https://doi.org/10.3390/s24010100
Prabhakara P, Lay V, Mielentz F, Niederleithinger E, Behrens M. Enhancing the Performance of a Large Aperture Ultrasound System (LAUS): A Combined Approach of Simulation and Measurement for Transmitter–Receiver Optimization. Sensors. 2024; 24(1):100. https://doi.org/10.3390/s24010100
Chicago/Turabian StylePrabhakara, Prathik, Vera Lay, Frank Mielentz, Ernst Niederleithinger, and Matthias Behrens. 2024. "Enhancing the Performance of a Large Aperture Ultrasound System (LAUS): A Combined Approach of Simulation and Measurement for Transmitter–Receiver Optimization" Sensors 24, no. 1: 100. https://doi.org/10.3390/s24010100