3.3. Performance Indicators
In order to authentically assess the performance of the algorithm presented in this study, we adopt the differentially driven motion modelproposed in the referenced literature [
22]. As illustrated in
Figure 10, the robotic platform is equipped with an omnidirectional wheel and two drive wheels. In the model,
,
, and
denote the linear velocities of the left drive wheel, right drive wheel, and overall robot, respectively. Symbol
L represents the wheelbase between the left and right drive wheels. The robot’s angular velocity is denoted by
. Consequently, the kinematic equations governing the robot’s motion are expressed as follows:
Here, , , and respectively signify the velocities of the robot in the x-axis, y-axis, and angular directions.
The PID controller stands as a classical feedback control methodology, continually adjusting the output to approximate the system’s actual output to the desired output [
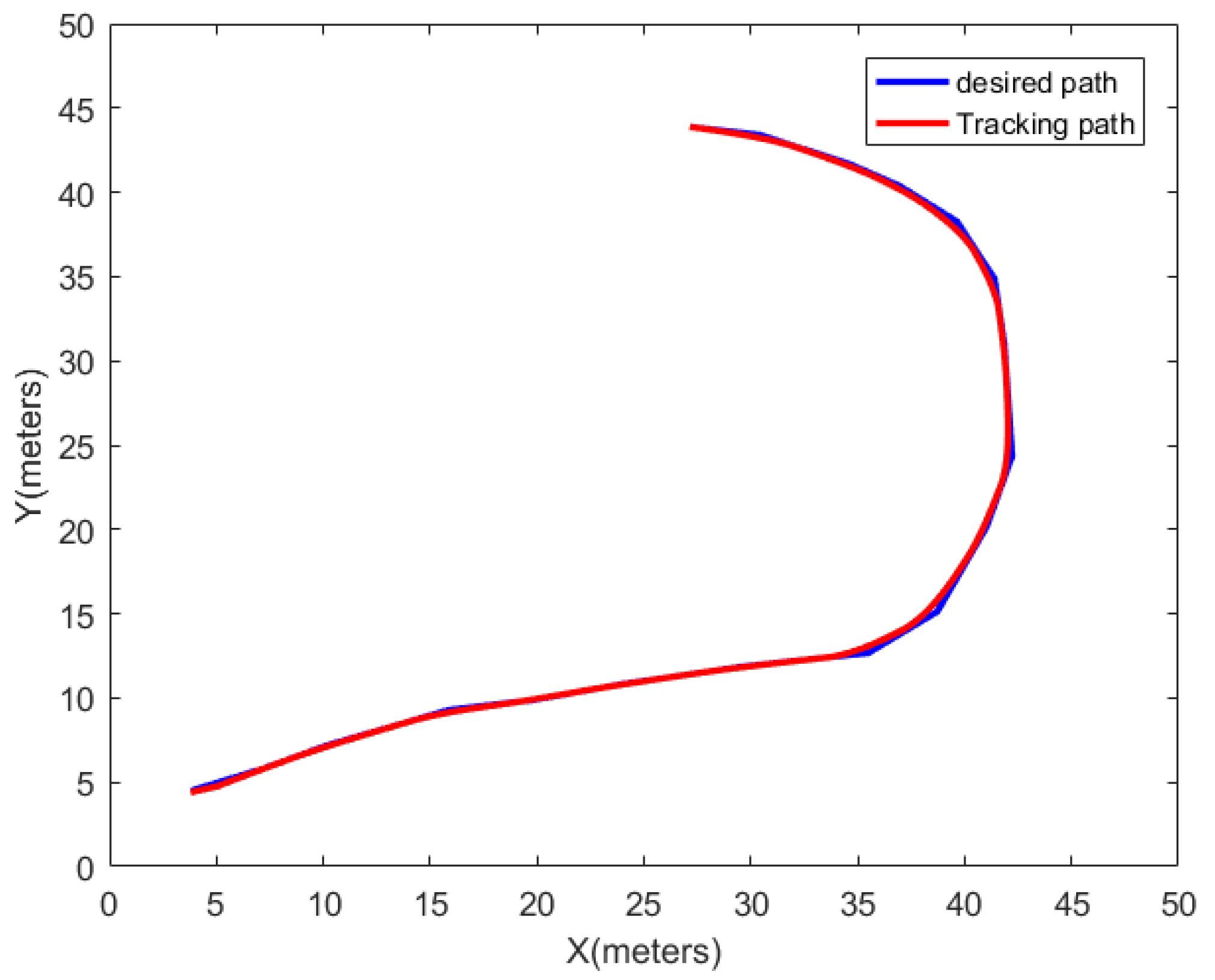
23]. Consequently, this manuscript employs the PID controller to govern the motion of a differentially driven two-wheeled vehicle, ensuring that the vehicle adheres to the planned trajectory. Under the assumption of a robot with a wheelbase of 60 cm and a travel speed of 1 m/s, the trajectory tracked by the differentially driven two-wheeled robot under PID control is illustrated in
Figure 11.
Figure 12 portrays the magnitudes of the robot’s angular velocity and center velocity on this trajectory.
The original path length is 73.73 m, and under PID control, the robot traverses this path in 79.4 s. Subsequently, this model is applied to path planning, and the simulated path is evaluated in the latter part of this paper.
The primary objective of the path planning endeavors to formulate an optimal collision-free trajectory. The consumption of electrical energy by the mobile robot serves as a pivotal determinant for the successful execution of its tasks. A superior trajectory holds the potential to abbreviate the robot’s traversal time, consequently mitigating power consumption. This, in turn, guarantees that the robot maintains an ample reserve of electrical energy to effectively accomplish its designated tasks, thereby augmenting the overall operational efficiency of the robot. Hence, it becomes imperative to mandate that the paths devised prioritize safety and smoothness while concurrently minimizing their length. This paper conducts a comprehensive assessment and discourse of the planned trajectories, evaluating and discussing them across six fundamental facets: path length, collision risk, path search duration, traversal duration, trajectory smoothness, and energy consumption.
(1) Path length
The goal is to achieve the shortest path possible. Assuming that the start position and target position are
and
, respectively, the path length calculation formula is:
where
represents the path length and the unit is m.
denotes the Euclidean distance between
and
.
(2) Collision risk value
The collision risk value refers to the possibility of collision with the robot at a given point on the robot’s trajectory. If the robot collides while moving, it may cause equipment damage, mission failure, robot damage, or environmental pollution and may even cause injury to people or endanger human safety. Therefore, it is very important to evaluate and control the collision risk in robot motion control. In this paper, a two-dimensional Gaussian model is used to establish a collision safety function to estimate the collision safety value. The specific formula is as follows:
where
represents an obstacle whose distance from the robot is less than the safe distance, and the general parameters
q and
C are usually set to 2 and 1, respectively.
(3) Exercise time
In practical tasks, the robot must complete the task on time, and when moving in a dangerous environment, shortening the time can reduce the risk of damage or danger to the robot. The time calculation formula is as follows:
where
is the movement time at the corresponding position
,
represents the movement speed of the robot at position
, and the robot speed is as given above.
(4) Path smoothness
The smoother the planned path is, the fewer the turning points of the path, and the less energy and time consumed by the mobile robot. The smoothness of the path is mainly calculated by the turning angle of the mobile robot along the target path. The specific formula is
where
is the value of the i-th corner of the obtained path (calculated in radians, varies from 0 to
),
N is the number of points of the path motion of the mobile robot, and
is the inner product of two vectors.
(5) Power consumption
Robots with low power consumption can work more efficiently, reduce charging time and improve working efficiency. In this paper, it is assumed that the initial power of the robot is 100% in each test experiment, and when the 50 kg weight of the goods is carried, the robot will exhaust its power by moving 1000 m on a straight path. In the linear motion of the mobile robot, constant acceleration is used to control the speed to reduce the number of speed changes, which can effectively reduce the energy consumption. According to [
24], the set speed changes every five time periods to consume 1% of the power. In addition, every time the rotation angle of the robot reaches 360°, it will consume 1% of the power. The formula for the quantity of power
E remaining after the robot has completed the handling task is shown in Equation (
20), where
is the number of speed changes:
In order to conduct a comprehensive evaluation of the algorithm, this study compares these metrics using percentages to better evaluate the performance of the algorithm. The calculation method is shown in Equations (
21) to (
26):
In the equations, , , , , , and represent the path length, collision risk value, searching time, run time, smoothness, and residual power obtained by the reference methods, respectively. , , , , , and represent the corresponding metrics for the path planned by the algorithm proposed in this study. , , , , , and represent the percentage reductions in path length, collision risk value, searching time, run time, smoothness, and residual power achieved by the algorithm proposed in this study compared to the reference methods.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}