
AST-GIN: Attribute-Augmented Spatiotemporal Graph Informer Network for Electric Vehicle Charging Station Availability Forecasting

Abstract
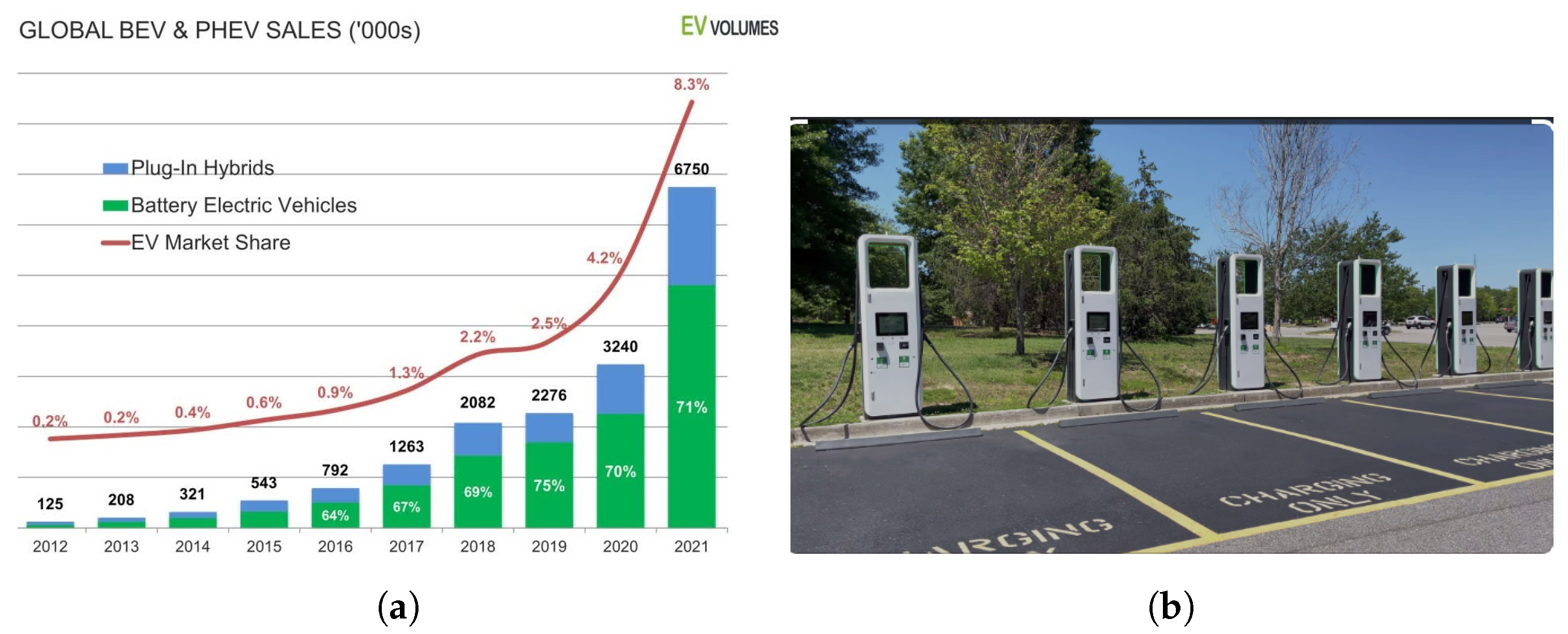
:1. Introduction
- As far as we know, our study is one of the few research works on the deep learning approaches for the EV charging station availability forecasting problem.
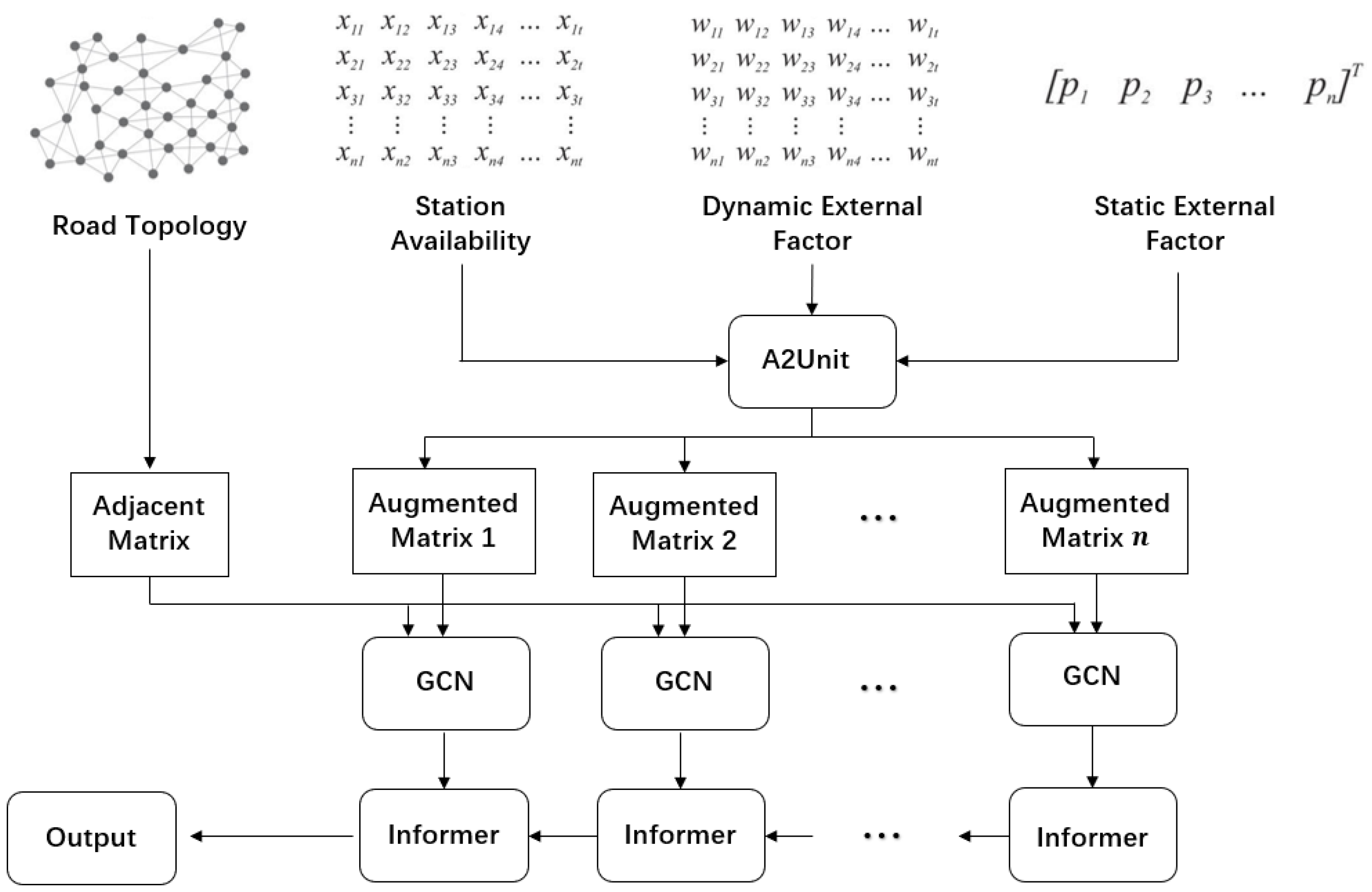
- The AST-GIN’s structure is firstly proposed to deal with the EV charging station availability forecasting problem by combining the Attribute Augmentation Unit (A2Unit), the GCN, and the Informer network.
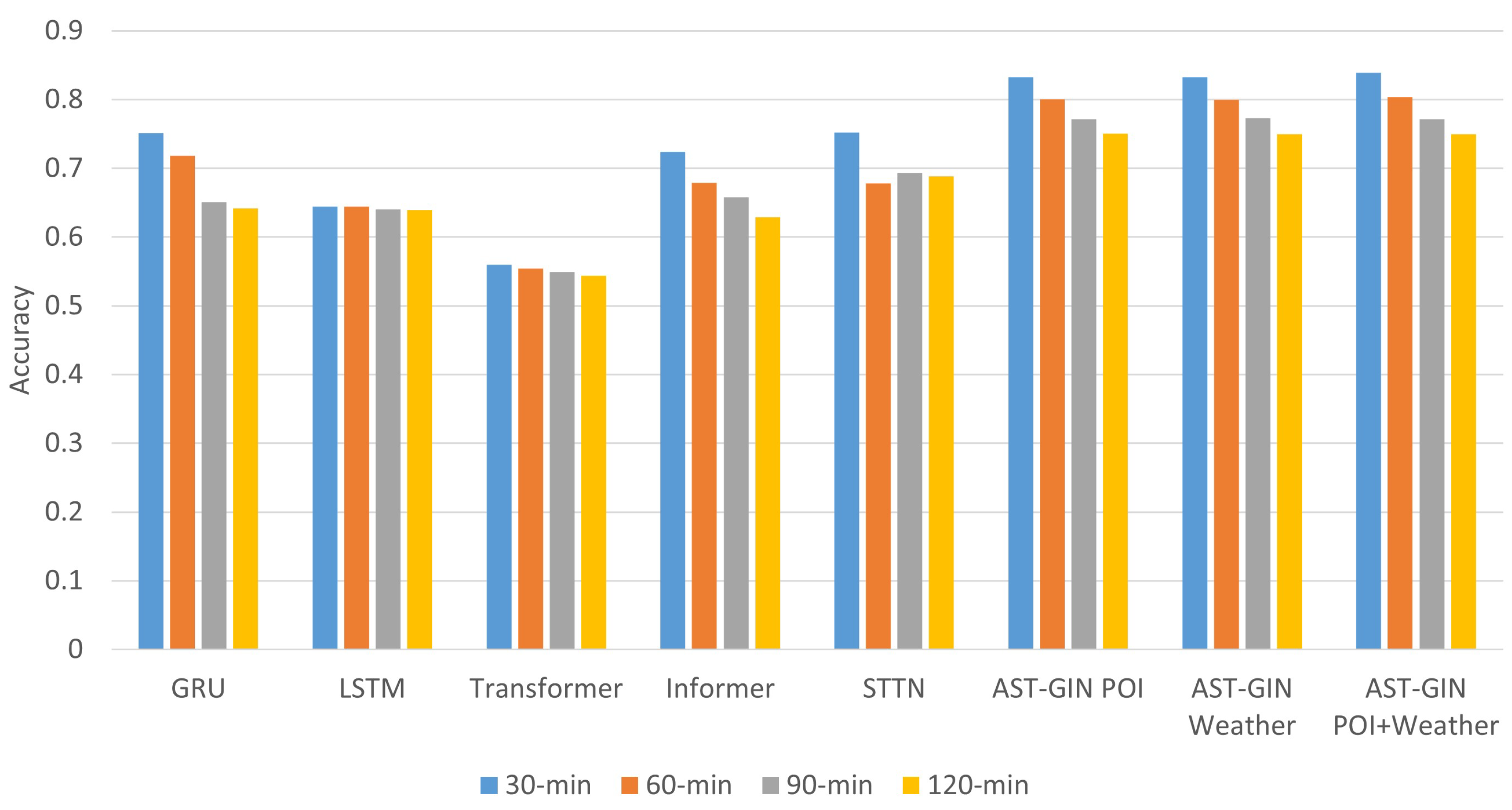
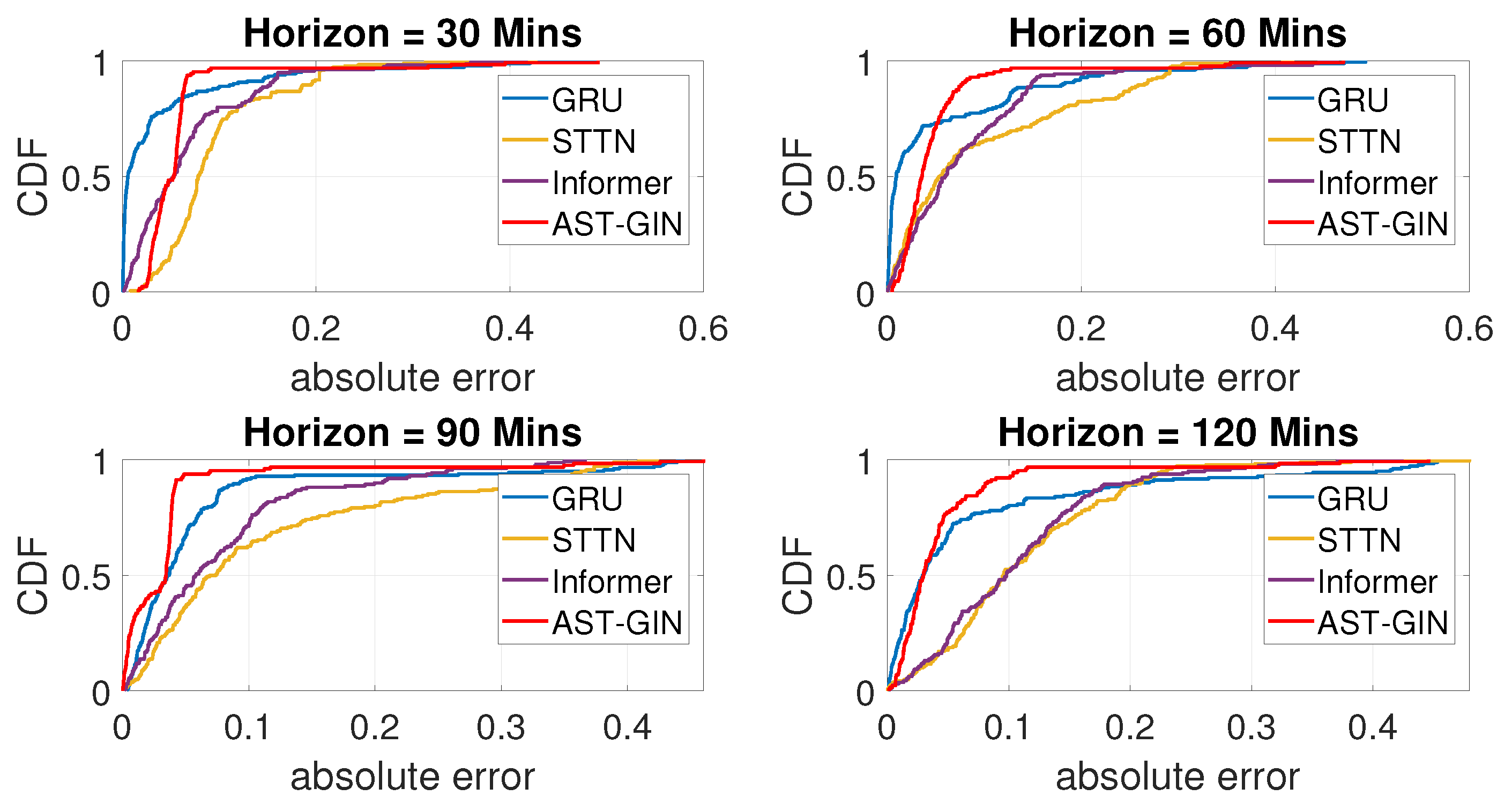
- The proposed AST-GIN model was verified and tested on real-world data. The comparison results showed that the AST-GIN has better prediction capability over different horizons and metrics.
2. Related Research
2.1. EV Charging Issue
2.2. Canonical Forecasting Model
2.3. Deep Learning Forecasting Model
2.4. External Factors in Forecasting
3. Methodology
3.1. Definition of EV Charging Station Availability
3.2. Incorporating the Attributes
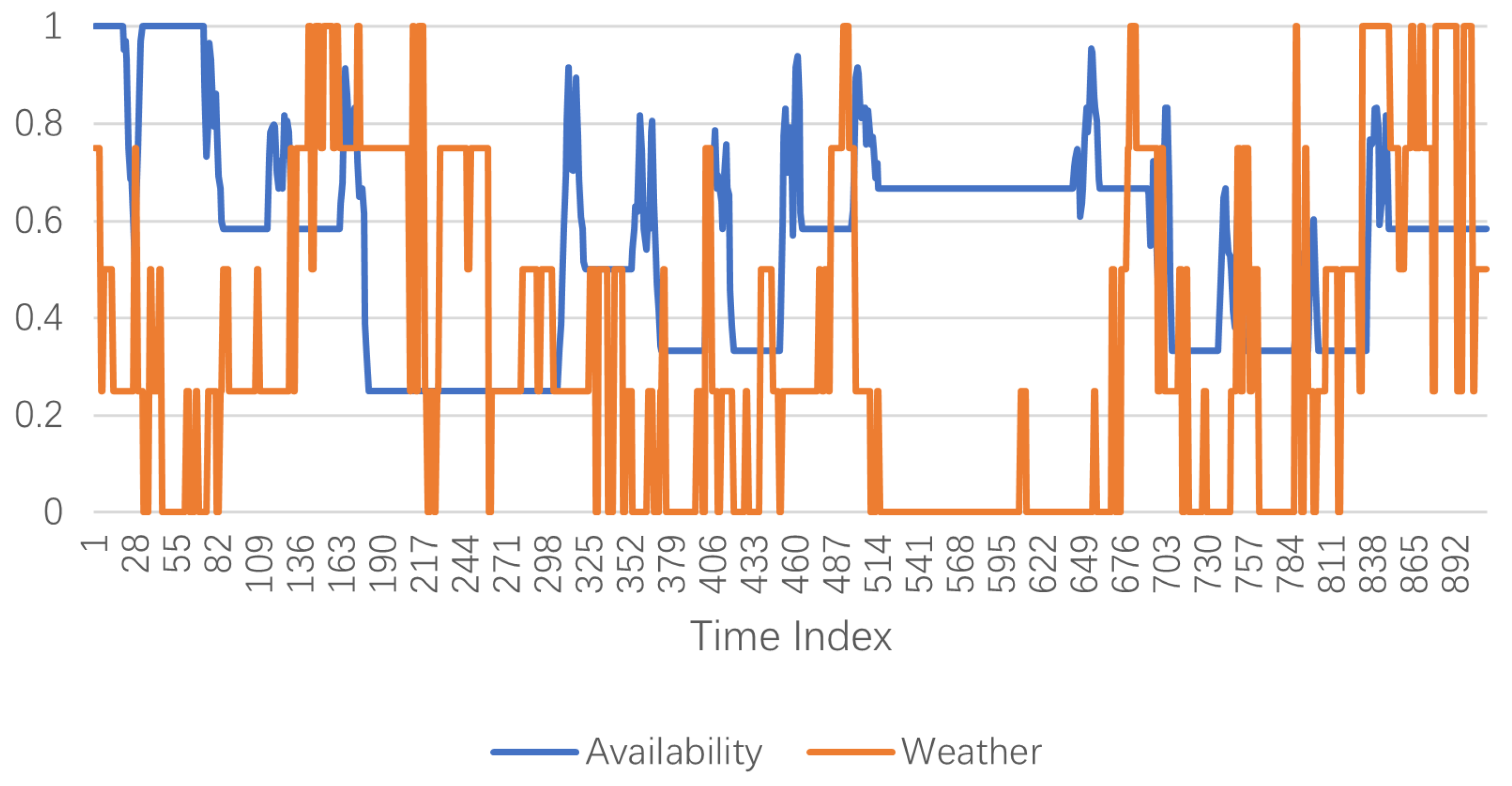
3.2.1. Weather Condition Attribute
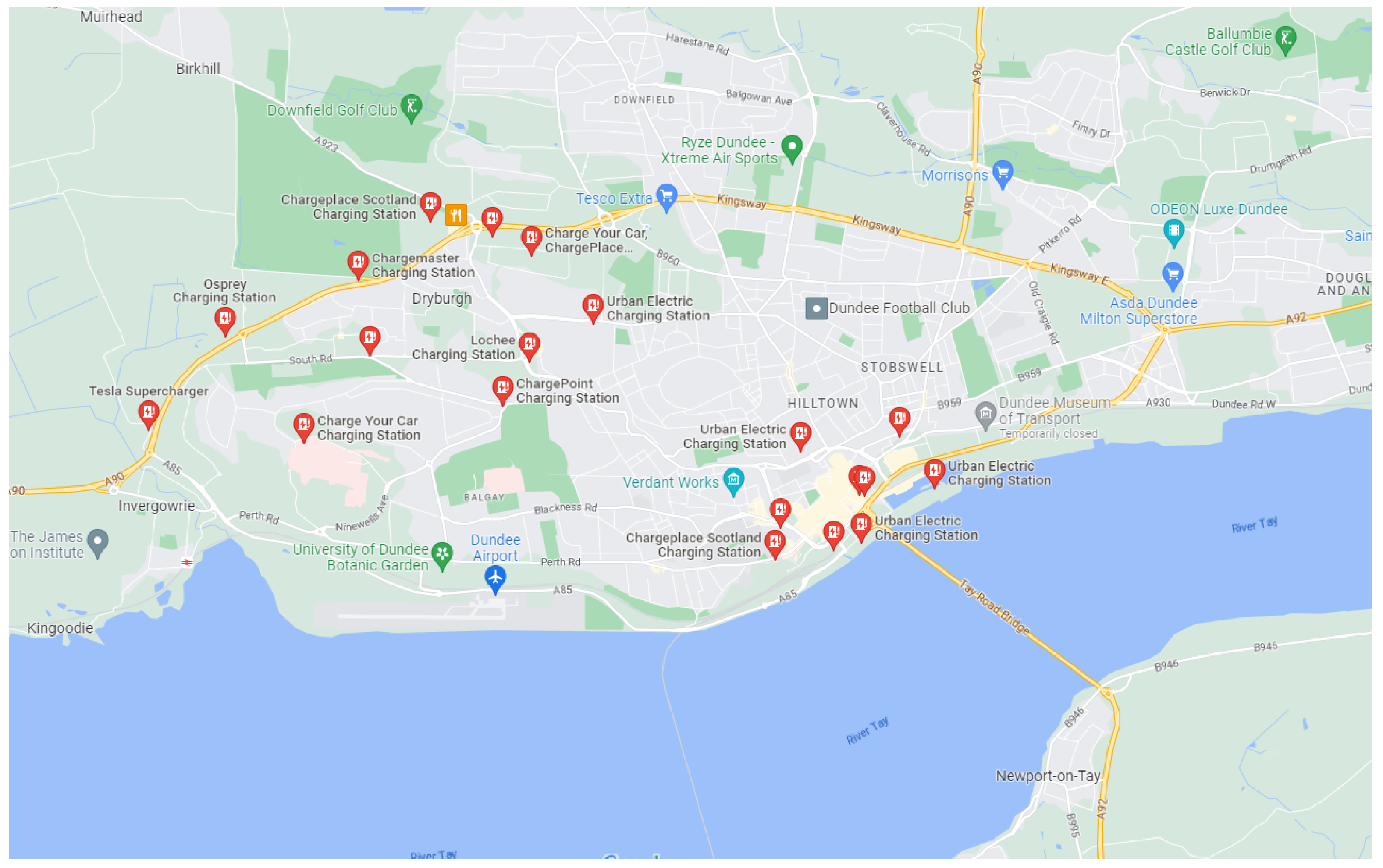
3.2.2. Road Network and POI Attributes


3.3. Problem Formulation
3.4. AST-GIN Architecture
3.4.1. A2Unit
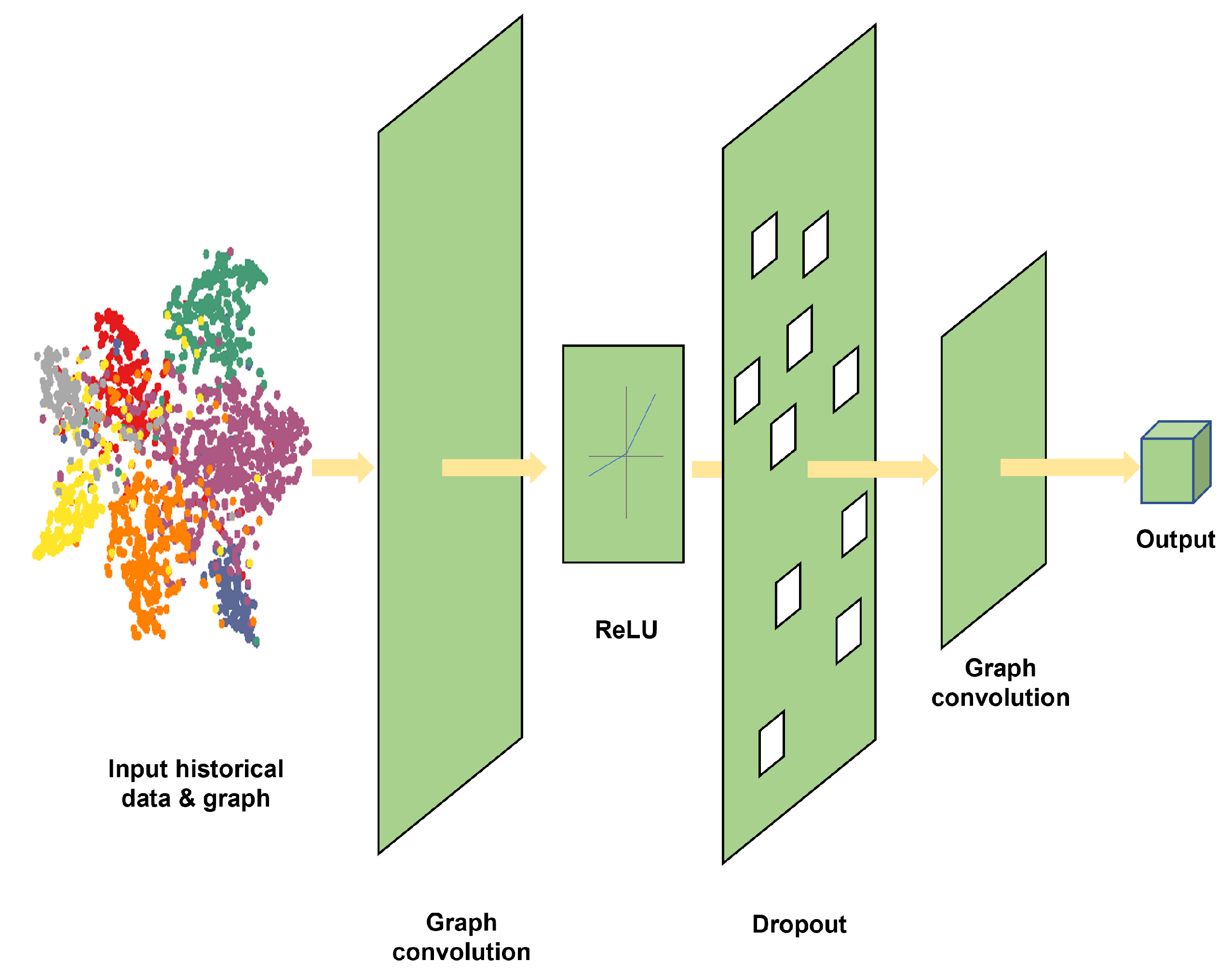
3.4.2. GCN Layer
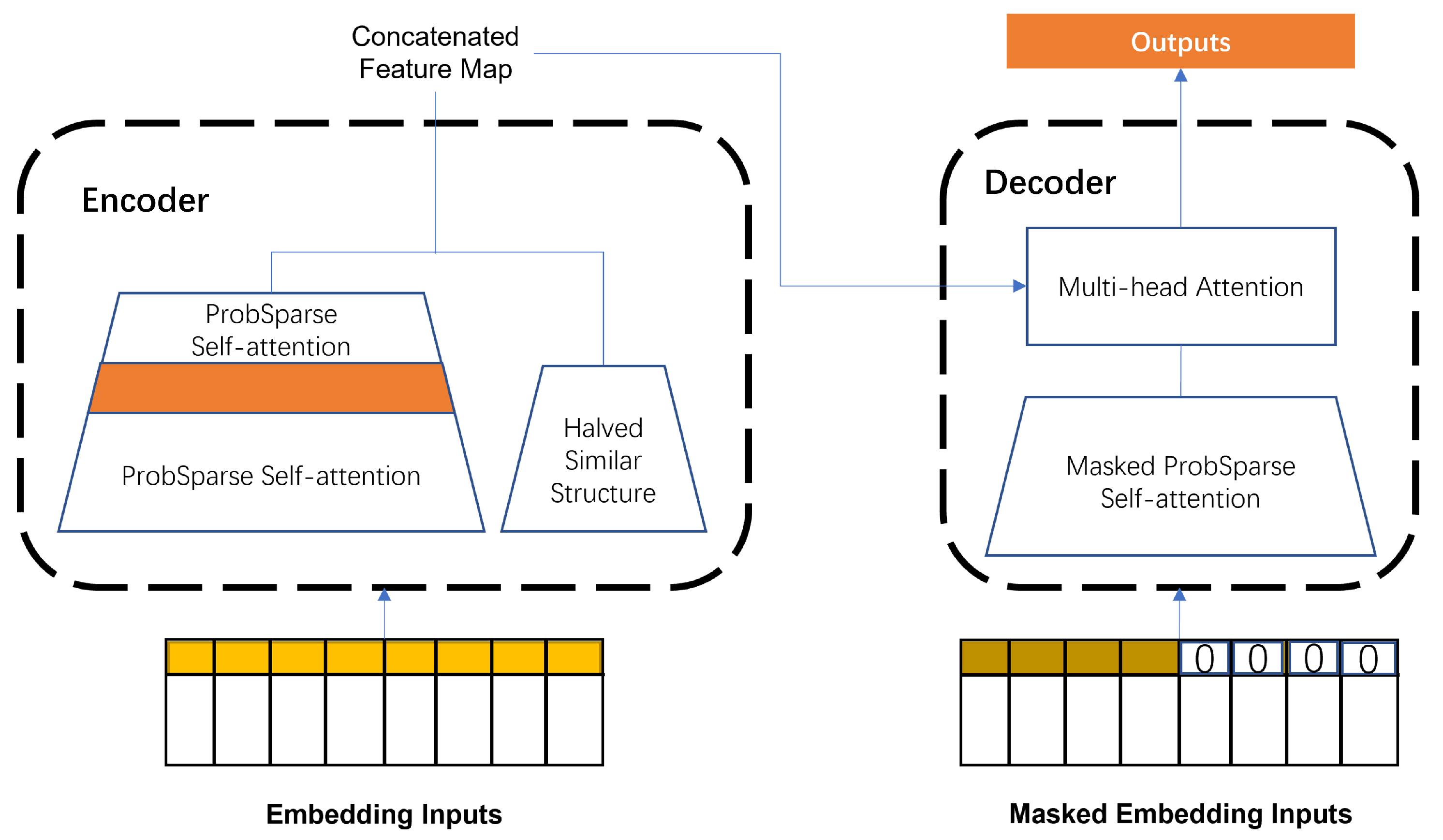
3.4.3. Informer Layer
3.4.4. Loss Function
4. Empirical Analysis
4.1. Dataset and Preprocessing
4.1.1. EV Charging Station Data
4.1.2. Static External Factors
4.1.3. Dynamic External Factors
4.2. Settings
4.2.1. Evaluation Metrics
4.2.2. Baseline Settings
- GRU: The commonly used time series model, which has been proven effective in traffic prediction problems and can alleviate the problem of gradient explosion and vanishing.
- LSTM: Together with the GRU, they are two popular variants of the RNN. LSTM has a more complex structure than the GRU.
- Transformer: The classic Transformer model with the self-attention mechanism [37].
- Informer: A new Transformer variant proposed to process the long-sequence prediction issue without spatial dependencies’ extraction.
- STTN: A new proposed framework utilizing two Transformer blocks to capture both spatial and long-range bidirectional temporal dependencies across multiple time steps [50].
4.2.3. Hyperparameters
4.3. Experimental Results
4.4. Results’ Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, R.; Su, R. Traffic signal transition time prediction based on aerial captures during peak hours. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 104–110. [Google Scholar]
- Irle, R. Global Plug-In Vehicle Sales Reached over 3, 2 Million in 2020. EV Volumes. Available online: https://www.ev-volumes.com (accessed on 10 October 2022).
- Storandt, S.; Funke, S. Cruising with a battery-powered vehicle and not getting stranded. In Proceedings of the AAAI Conference on Artificial Intelligence, Stanford, CA, USA, 8–12 October 2012; Volume 26. [Google Scholar]
- Qian, K.; Zhou, C.; Allan, M.; Yuan, Y. Load model for prediction of electric vehicle charging demand. In Proceedings of the 2010 International Conference on Power System Technology, Hangzhou, China, 24–28 October 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 1–6. [Google Scholar]
- Kondo, Y.; Kato, H.; Ando, R.; Suzuki, T.; Karakama, Y. To what extent can speed management alleviate the range anxiety of EV? In Proceedings of the 2013 World Electric Vehicle Symposium and Exhibition (EVS27), Barcelona, Spain, 17–20 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar]
- Deilami, S.; Masoum, A.S.; Moses, P.S.; Masoum, M.A. Real-time coordination of plug-in electric vehicle charging in smart grids to minimize power losses and improve voltage profile. IEEE Trans. Smart Grid 2011, 2, 456–467. [Google Scholar] [CrossRef]
- Xiong, Y.; Gan, J.; An, B.; Miao, C.; Bazzan, A.L. Optimal electric vehicle fast charging station placement based on game theoretical framework. IEEE Trans. Intell. Transp. Syst. 2017, 19, 2493–2504. [Google Scholar] [CrossRef]
- Alface, G.; Ferreira, J.C.; Pereira, R. Electric vehicle charging process and parking guidance app. Energies 2019, 12, 2123. [Google Scholar] [CrossRef]
- Yan, J.; Zhang, J.; Liu, Y.; Lv, G.; Han, S.; Alfonzo, I.E.G. EV charging load simulation and forecasting considering traffic jam and weather to support the integration of renewables and EVs. Renew. Energy 2020, 159, 623–641. [Google Scholar] [CrossRef]
- Zhu, J.; Wang, Q.; Tao, C.; Deng, H.; Zhao, L.; Li, H. AST-GCN: Attribute-augmented spatiotemporal graph convolutional network for traffic forecasting. IEEE Access 2021, 9, 35973–35983. [Google Scholar] [CrossRef]
- Huang, C.W.; Chiang, C.T.; Li, Q. A study of deep learning networks on mobile traffic forecasting. In Proceedings of the 2017 IEEE 28th Annual International Symposium on Personal, Indoor, and Mobile Radio Communications (PIMRC), Montreal, QC, Canada, 8–13 October 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 1–6. [Google Scholar]
- Siami-Namini, S.; Tavakoli, N.; Namin, A.S. A comparison of ARIMA and LSTM in forecasting time series. In Proceedings of the 2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), Orlando, FL, USA, 17–20 December 2018; IEEE: Piscataway, NJ, USA, 2018; pp. 1394–1401. [Google Scholar]
- Jiang, W.; Luo, J. Graph neural network for traffic forecasting: A survey. arXiv 2021, arXiv:2101.11174. [Google Scholar] [CrossRef]
- Yang, J.; Chen, H.; Xu, Y.; Shi, Z.; Luo, R.; Xie, L.; Su, R. Domain adaptation for degraded remote scene classification. In Proceedings of the 2020 16th International Conference on Control, Automation, Robotics and Vision (ICARCV), Shenzhen, China, 13–15 December 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 111–117. [Google Scholar]
- Amara-Ouali, Y.; Goude, Y.; Massart, P.; Poggi, J.M.; Yan, H. A review of electric vehicle load open data and models. Energies 2021, 14, 2233. [Google Scholar] [CrossRef]
- Bikcora, C.; Refa, N.; Verheijen, L.; Weiland, S. Prediction of availability and charging rate at charging stations for electric vehicles. In Proceedings of the 2016 International Conference on Probabilistic Methods Applied to Power Systems (PMAPS), Beijing, China, 16–20 October 2016; IEEE: Piscataway, NJ, USA, 2016; pp. 1–6. [Google Scholar]
- Kim, T.Y.; Cho, S.B. Predicting residential energy consumption using CNN-LSTM neural networks. Energy 2019, 182, 72–81. [Google Scholar] [CrossRef]
- Lee, Z.J.; Li, T.; Low, S.H. ACN-Data: Analysis and applications of an open EV charging dataset. In Proceedings of the Tenth ACM International Conference on Future Energy Systems, Phoenix, AZ, USA, 25–28 June 2019; pp. 139–149. [Google Scholar]
- Flammini, M.G.; Prettico, G.; Julea, A.; Fulli, G.; Mazza, A.; Chicco, G. Statistical characterisation of the real transaction data gathered from electric vehicle charging stations. Electr. Power Syst. Res. 2019, 166, 136–150. [Google Scholar] [CrossRef]
- Majidpour, M.; Qiu, C.; Chu, P.; Pota, H.R.; Gadh, R. Forecasting the EV charging load based on customer profile or station measurement? Appl. Energy 2016, 163, 134–141. [Google Scholar] [CrossRef] [Green Version]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef] [PubMed]
- Ma, T.Y.; Faye, S. Multistep electric vehicle charging station occupancy prediction using hybrid LSTM neural networks. Energy 2022, 244, 123217. [Google Scholar] [CrossRef]
- Ahmadian, A.; Mohammadi-Ivatloo, B.; Elkamel, A. A review on plug-in electric vehicles: Introduction, current status, and load modeling techniques. J. Mod. Power Syst. Clean Energy 2020, 8, 412–425. [Google Scholar] [CrossRef]
- Savari, G.F.; Krishnasamy, V.; Sathik, J.; Ali, Z.M.; Aleem, S.H.A. Internet of Things based real-time electric vehicle load forecasting and charging station recommendation. Isa Trans. 2020, 97, 431–447. [Google Scholar] [CrossRef] [PubMed]
- Huang, N.; He, Q.; Qi, J.; Hu, Q.; Wang, R.; Cai, G.; Yang, D. Multinodes interval electric vehicle day-ahead charging load forecasting based on joint adversarial generation. Int. J. Electr. Power Energy Syst. 2022, 143, 108404. [Google Scholar] [CrossRef]
- Zheng, Y.; Shao, Z.; Zhang, Y.; Jian, L. A systematic methodology for mid-and-long term electric vehicle charging load forecasting: The case study of Shenzhen, China. Sustain. Cities Soc. 2020, 56, 102084. [Google Scholar] [CrossRef]
- Zhang, W.; Liu, H.; Liu, Y.; Zhou, J.; Xu, T.; Xiong, H. Semi-Supervised City-Wide Parking Availability Prediction via Hierarchical Recurrent Graph Neural Network. IEEE Trans. Knowl. Data Eng. 2020, 34, 3984–3996. [Google Scholar] [CrossRef]
- Yang, S.; Ma, W.; Pi, X.; Qian, S. A deep learning approach to real-time parking occupancy prediction in transportation networks incorporating multiple spatio-temporal data sources. Transp. Res. Part Emerg. Technol. 2019, 107, 248–265. [Google Scholar] [CrossRef]
- Pantelidis, T.P.; Li, L.; Ma, T.Y.; Chow, J.Y.; Jabari, S.E.G. A node-charge graph-based online carshare rebalancing policy with capacitated electric charging. Transp. Sci. 2021, 56, 654–676. [Google Scholar] [CrossRef]
- Ma, T.Y.; Pantelidis, T.; Chow, J.Y. Optimal queueing-based rebalancing for one-way electric carsharing systems with stochastic demand. arXiv 2021, arXiv:2106.02815. [Google Scholar]
- Zhao, H.; Yang, H.; Wang, Y.; Wang, D.; Su, R. Attention Based Graph Bi-LSTM Networks for Traffic Forecasting. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Luo, X.; Li, D.; Zhang, S. Traffic flow prediction during the holidays based on DFT and SVR. J. Sensors 2019, 2019, 6461450. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; Yang, H.; Wang, Y.; Su, R.; Wang, D. Domain-Adversarial-based Temporal Graph Convolutional Network for Traffic Flow Prediction Problem. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1365–1370. [Google Scholar]
- Yang, H.; Wang, Y.; Zhao, H.; Zhu, J.; Wang, D. Real-time Traffic Incident Detection Using an Autoencoder Model. In Proceedings of the 2020 IEEE 23rd International Conference on Intelligent Transportation Systems (ITSC), Rhodes, Greece, 20–23 September 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–6. [Google Scholar]
- Zhang, D.; Kabuka, M.R. Combining weather condition data to predict traffic flow: A GRU-based deep learning approach. Iet Intell. Transp. Syst. 2018, 12, 578–585. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. Adv. Neural Inf. Process. Syst. 2015, 28, 802–810. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Kaiser, Ł.; Polosukhin, I. Attention is all you need. Adv. Neural Inf. Process. Syst. 2017, 30, 6000–6010. [Google Scholar]
- Luo, R.; Zhang, Y.; Zhou, Y.; Chen, H.; Yang, L.; Yang, J.; Su, R. Deep Learning Approach for Long-Term Prediction of Electric Vehicle (EV) Charging Station Availability. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 3334–3339. [Google Scholar]
- Wagner, S.; Götzinger, M.; Neumann, D. Optimal location of charging stations in smart cities: A points of interest based approach. In Proceedings of the 34th International Conference on Information Systems, Milan, Italy, 15–18 December 2013. [Google Scholar]
- Koncar, I.; Bayram, I.S. A probabilistic methodology to quantify the impacts of cold weather on electric vehicle demand: A case study in the UK. IEEE Access 2021, 9, 88205–88216. [Google Scholar] [CrossRef]
- Liao, B.; Zhang, J.; Wu, C.; McIlwraith, D.; Chen, T.; Yang, S.; Guo, Y.; Wu, F. Deep sequence learning with auxiliary information for traffic prediction. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 537–546. [Google Scholar]
- Zhao, L.; Song, Y.; Zhang, C.; Liu, Y.; Wang, P.; Lin, T.; Deng, M.; Li, H. T-gcn: A temporal graph convolutional network for traffic prediction. IEEE Trans. Intell. Transp. Syst. 2019, 21, 3848–3858. [Google Scholar] [CrossRef]
- Quirós-Tortós, J.; Ochoa, L.F.; Lees, B. A statistical analysis of EV charging behavior in the UK. In Proceedings of the 2015 IEEE PES Innovative Smart Grid Technologies Latin America (ISGT LATAM), Montevideo, Uruguay, 5–7 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 445–449. [Google Scholar]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.; Wang, Y. Learning traffic as images: A deep convolutional neural network for large-scale transportation network speed prediction. Sensors 2017, 17, 818. [Google Scholar] [CrossRef]
- Ranjan, N.; Bhandari, S.; Zhao, H.P.; Kim, H.; Khan, P. City-wide traffic congestion prediction based on CNN, LSTM and transpose CNN. IEEE Access 2020, 8, 81606–81620. [Google Scholar] [CrossRef]
- Kipf, T.N.; Welling, M. Semi-supervised classification with graph convolutional networks. arXiv 2016, arXiv:1609.02907. [Google Scholar]
- Tsai, Y.H.H.; Bai, S.; Yamada, M.; Morency, L.P.; Salakhutdinov, R. Transformer Dissection: A Unified Understanding of Transformer’s Attention via the Lens of Kernel. arXiv 2019, arXiv:1908.11775. [Google Scholar]
- Zhou, H.; Zhang, S.; Peng, J.; Zhang, S.; Li, J.; Xiong, H.; Zhang, W. Informer: Beyond efficient transformer for long sequence time series forecasting. In Proceedings of the AAAI, Virtually, 2–9 February 2021. [Google Scholar]
- Bilgic, B.; Chatnuntawech, I.; Fan, A.P.; Setsompop, K.; Cauley, S.F.; Wald, L.L.; Adalsteinsson, E. Fast image reconstruction with L2-regularization. J. Magn. Reson. Imaging 2014, 40, 181–191. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Xu, M.; Dai, W.; Liu, C.; Gao, X.; Lin, W.; Qi, G.J.; Xiong, H. Spatial-temporal transformer networks for traffic flow forecasting. arXiv 2020, arXiv:2001.02908. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Horizon (min) | Metric | GRU | LSTM | Transformer | Informer | STTN | AST-GIN | ||
|---|---|---|---|---|---|---|---|---|---|
| POI | Weather | POI + Weather | |||||||
| 30 | RMSE | 0.1726 | 0.2431 | 0.2923 | 0.2112 | 0.171 | 0.1215 | 0.1224 | 0.1174 |
| 0.7665 | 0.4918 | 0.4021 | 0.6583 | 0.7183 | 0.8778 | 0.8709 | 0.8803 | ||
| EVS | 0.7579 | 0.4879 | 0.3746 | 0.6511 | 0.7175 | 0.8787 | 0.8704 | 0.8801 | |
| MAE | 0.1041 | 0.1683 | 0.2365 | 0.1556 | 0.1331 | 0.0784 | 0.0759 | 0.067 | |
| Accuracy | 0.7531 | 0.6493 | 0.5589 | 0.7293 | 0.7521 | 0.8382 | 0.8322 | 0.8388 | |
| 60 | RMSE | 0.1820 | 0.2321 | 0.2862 | 0.2326 | 0.2221 | 0.1446 | 0.1471 | 0.1438 |
| 0.6851 | 0.5047 | 0.3952 | 0.5467 | 0.6248 | 0.8149 | 0.8174 | 0.8227 | ||
| EVS | 0.6789 | 0.4941 | 0.3782 | 0.5376 | 0.6276 | 0.8149 | 0.8174 | 0.8225 | |
| MAE | 0.1168 | 0.1735 | 0.2385 | 0.1870 | 0.1679 | 0.0827 | 0.0864 | 0.0757 | |
| Accuracy | 0.7138 | 0.6424 | 0.5534 | 0.6798 | 0.6728 | 0.8020 | 0.7994 | 0.8037 | |
| 90 | RMSE | 0.2269 | 0.2336 | 0.2848 | 0.2613 | 0.2118 | 0.1682 | 0.1674 | 0.1687 |
| 0.5362 | 0.496 | 0.3335 | 0.4806 | 0.5718 | 0.7652 | 0.7653 | 0.7605 | ||
| EVS | 0.5085 | 0.485 | 0.3662 | 0.4695 | 0.5634 | 0.7641 | 0.7652 | 0.7604 | |
| MAE | 0.1548 | 0.1741 | 0.2377 | 0.1976 | 0.1683 | 0.0957 | 0.0982 | 0.1017 | |
| Accuracy | 0.6508 | 0.6406 | 0.5491 | 0.6581 | 0.693 | 0.7713 | 0.7731 | 0.7713 | |
| 120 | RMSE | 0.2372 | 0.2354 | 0.2896 | 0.2882 | 0.3264 | 0.1834 | 0.1852 | 0.1851 |
| 0.5114 | 0.4743 | 0.3237 | 0.4553 | 0.5581 | 0.7162 | 0.7138 | 0.7134 | ||
| EVS | 0.4823 | 0.4675 | 0.3624 | 0.3934 | 0.5524 | 0.7154 | 0.7131 | 0.7131 | |
| MAE | 0.1565 | 0.1769 | 0.2369 | 0.2128 | 0.1643 | 0.1134 | 0.1106 | 0.1123 | |
| Accuracy | 0.6481 | 0.6329 | 0.5473 | 0.6238 | 0.6839 | 0.7517 | 0.7496 | 0.7496 | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Luo, R.; Song, Y.; Huang, L.; Zhang, Y.; Su, R. AST-GIN: Attribute-Augmented Spatiotemporal Graph Informer Network for Electric Vehicle Charging Station Availability Forecasting. Sensors 2023, 23, 1975. https://doi.org/10.3390/s23041975
Luo R, Song Y, Huang L, Zhang Y, Su R. AST-GIN: Attribute-Augmented Spatiotemporal Graph Informer Network for Electric Vehicle Charging Station Availability Forecasting. Sensors. 2023; 23(4):1975. https://doi.org/10.3390/s23041975
Chicago/Turabian StyleLuo, Ruikang, Yaofeng Song, Liping Huang, Yicheng Zhang, and Rong Su. 2023. "AST-GIN: Attribute-Augmented Spatiotemporal Graph Informer Network for Electric Vehicle Charging Station Availability Forecasting" Sensors 23, no. 4: 1975. https://doi.org/10.3390/s23041975