
Channel Estimation for RIS-Assisted MIMO Systems in Millimeter Wave Communications


Abstract
:1. Introduction
- We present a linear minimal mean square error (LMMSE) channel estimation approach based on OMP to estimate the BS-UE direct channel without taking RIS into account in the model we develop in mmWave MIMO communication system. We employ the OMP approach to obtain the support set and the LMMSE algorithm to estimate the channel after converting the channel estimation problem into a sparse signal recovery problem. The proposed approach can increase estimation accuracy while requiring less pilot overhead.
- By using the double-structured sparsity of the angle cascaded channel in mmWave, we present an LMMSE channel estimation technique based on DS-OMP to estimate the BS-RIS-UE cascaded channel. The DS-OMP approach is used to get the support sets for the angle cascaded channel, and the LMMSE algorithm is used to estimate the channel. The proposed technique successfully manages noise to produce a more accurate estimation.
2. System Model and Problem Formulation
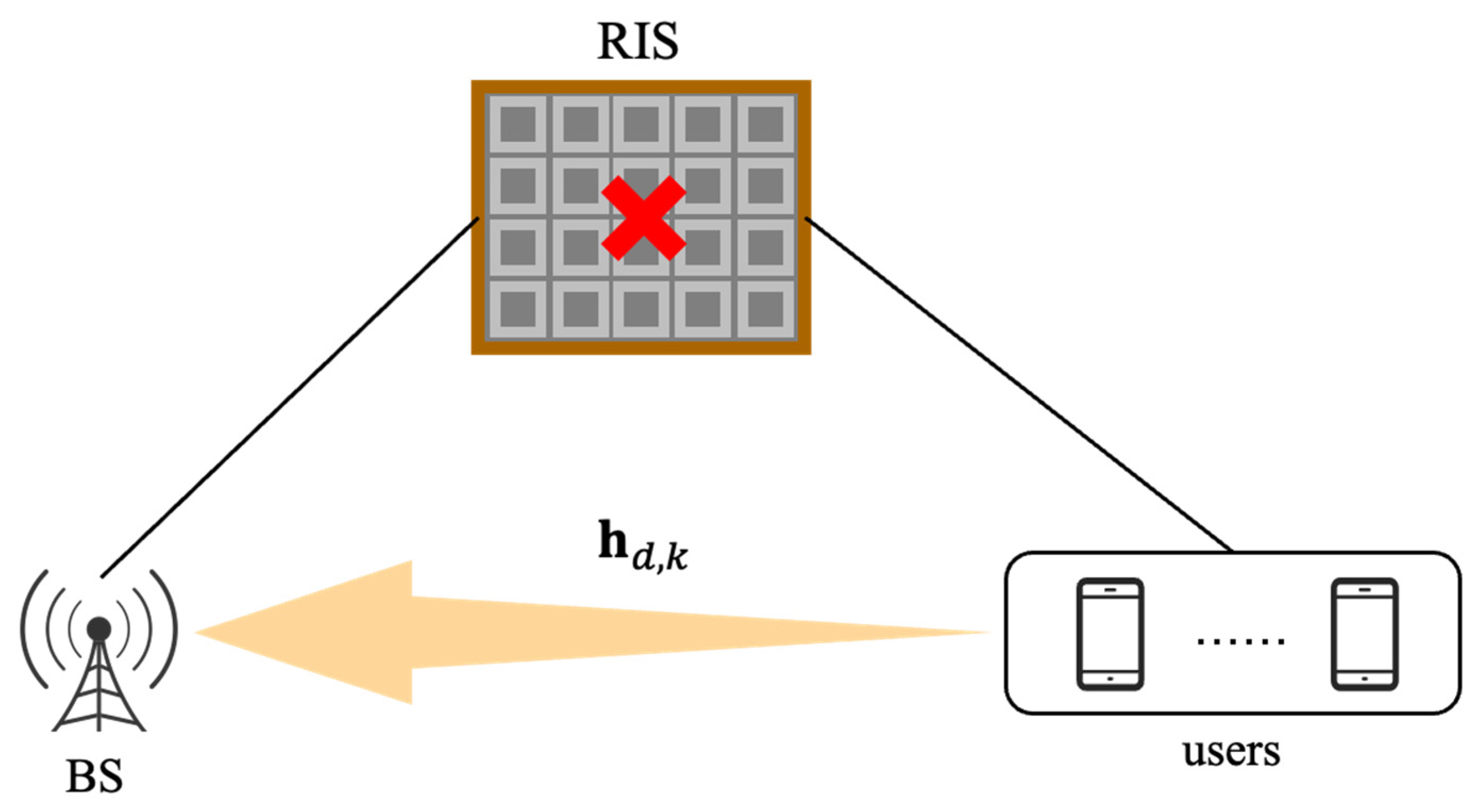
2.1. Direct Channel
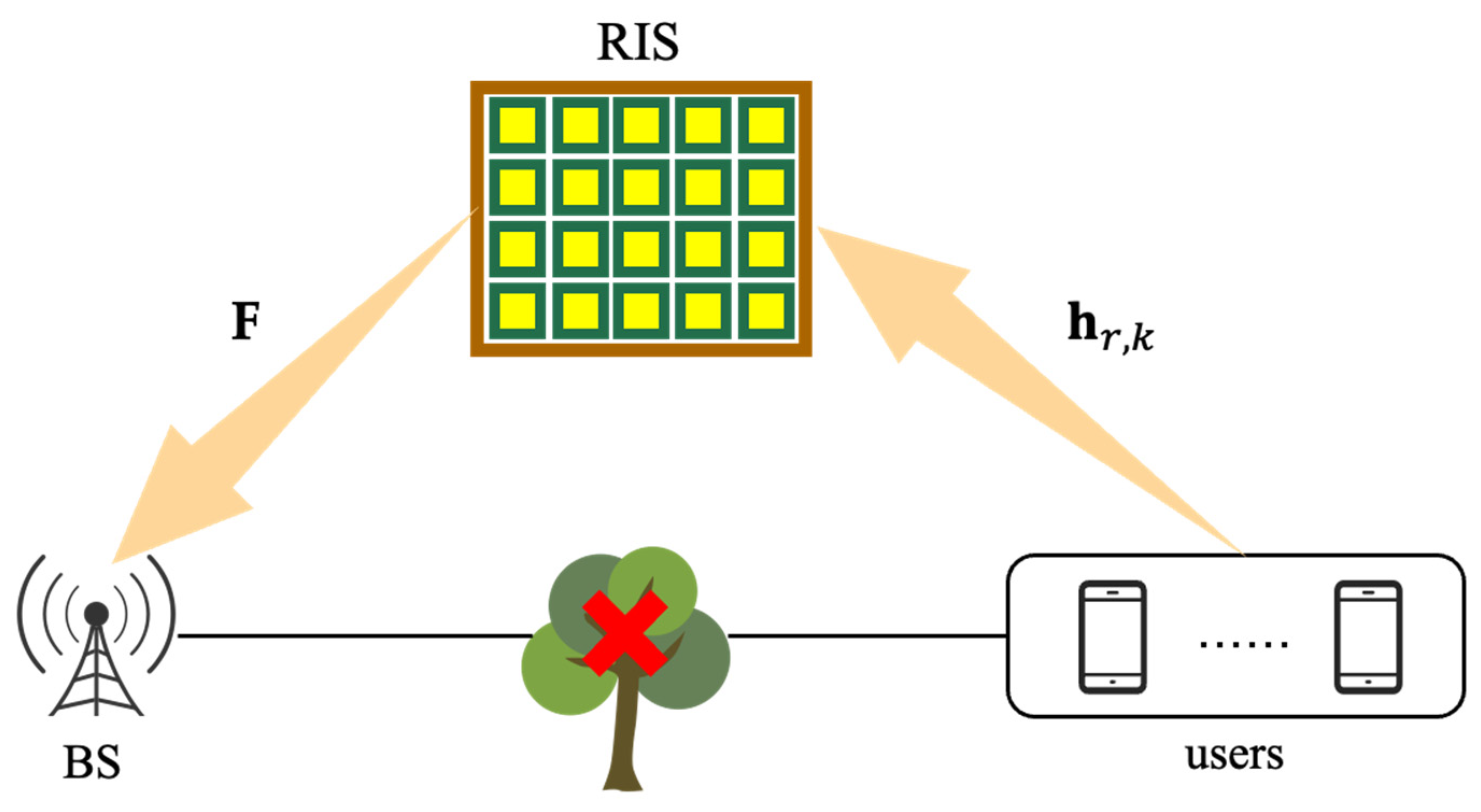
2.2. Cascaded Channel
3. Proposed Channel Estimation Scheme
3.1. Direct Channel Estimation
3.1.1. Least Square (LS) Algorithm
3.1.2. Proposed LMMSE Algorithm Based on OMP
| Algorithm 1 Proposed LMMSE Algorithm Based on OMP |
| Input: Receive signal, ; sensing matrix, ; true channel matrix, ; a scalar parameter for LMMSE estimation, ; SNR; BS’s number of antennas, M; the number of users, K; and the number of paths (BS-UE), . |
| Initialization: , , . |
| 1. for do |
| 2. = (: , : , k), . |
| 3. for do |
| 4. Compute the term = . |
| 5. Find the index of the maximum value in the term. |
| 6. Find the column and row indices of the selected index. |
| 7. for do |
| 8. Find the corresponding rows in and |
| 9. Compute the LS of the channel for the selected column |
| 10. end for |
| 11. end for |
| 12. ’; ’. |
| 13. Calculate the estimated channel matrix, according to Equation (19). |
| 14. end for |
| Output: Estimated channel matrix, . |
3.1.3. Computational Complexity Analysis
3.2. Cascaded Channel Estimation
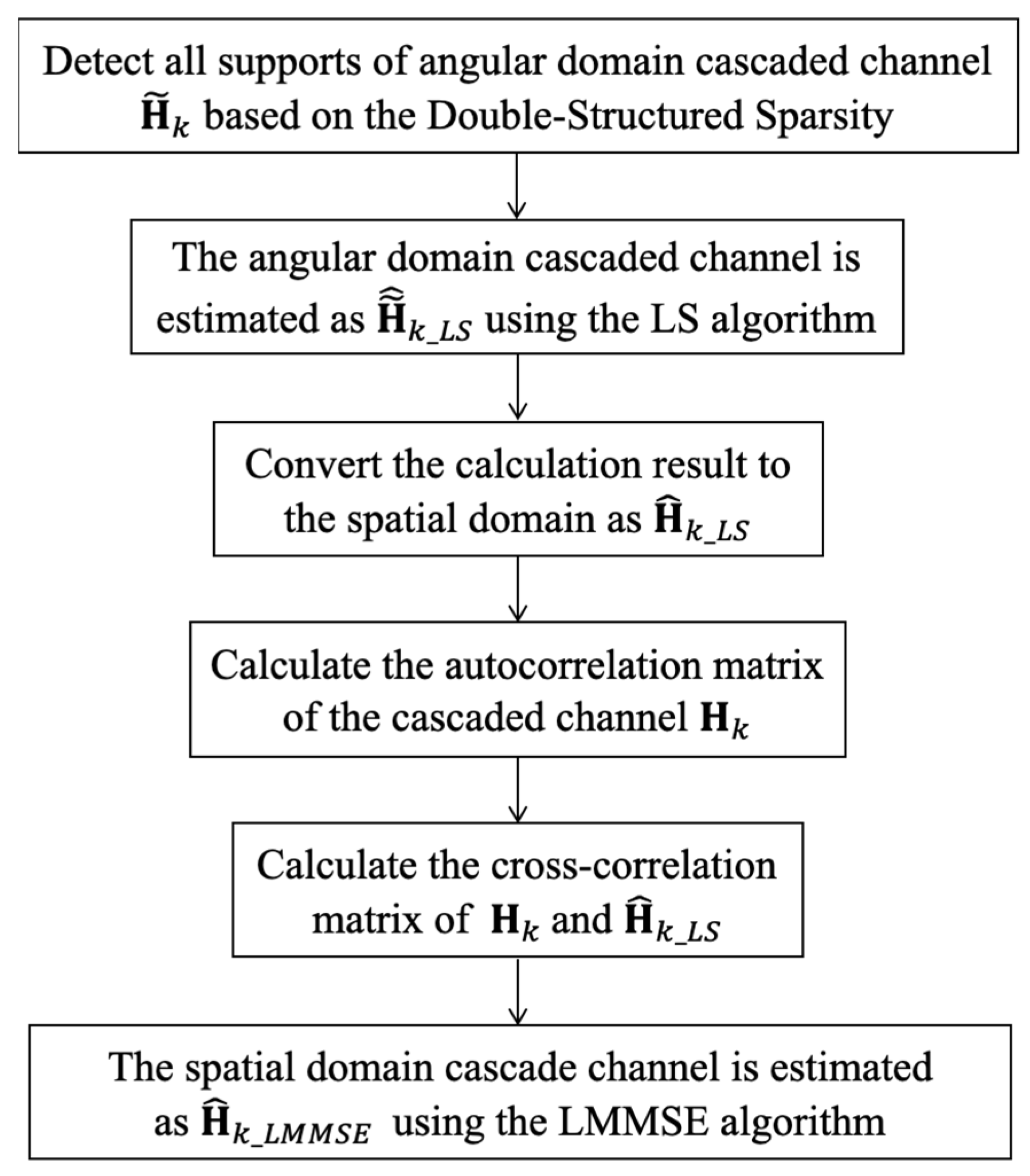
3.2.1. Proposed LMMSE Algorithm Based on OMP
3.2.2. Computational Complexity Analysis
4. Stimulation Results
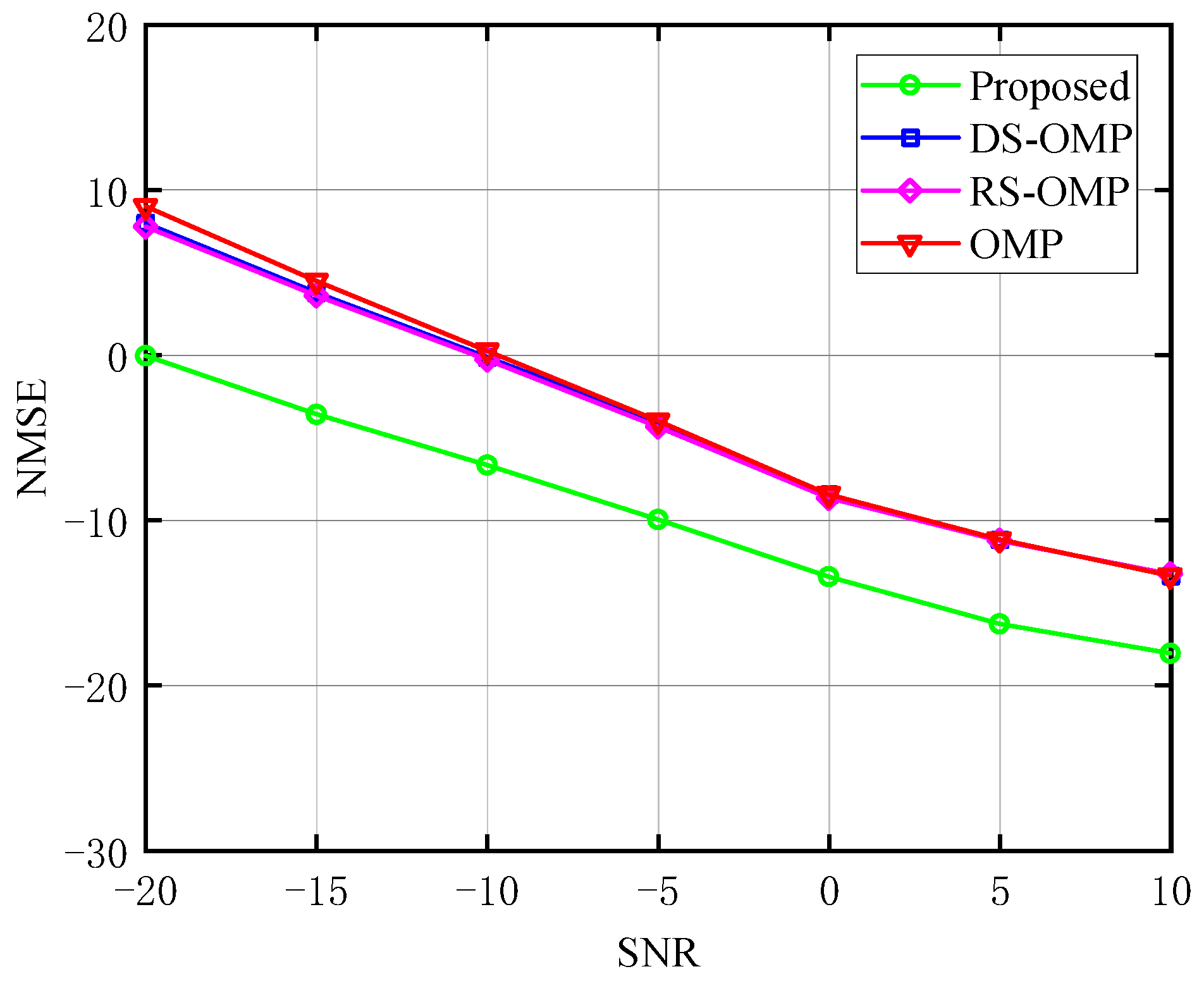
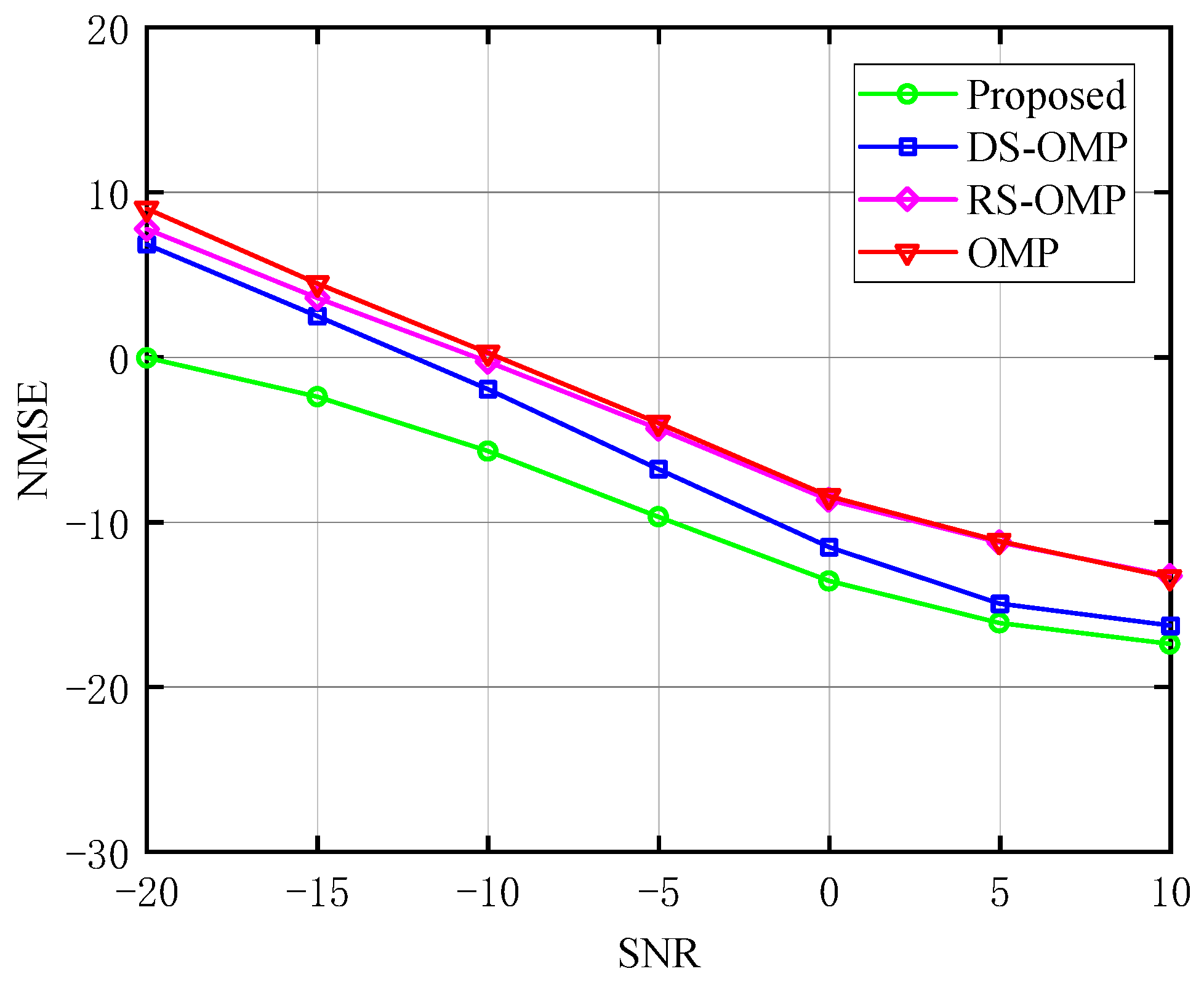
4.1. Direct Channel Estimation
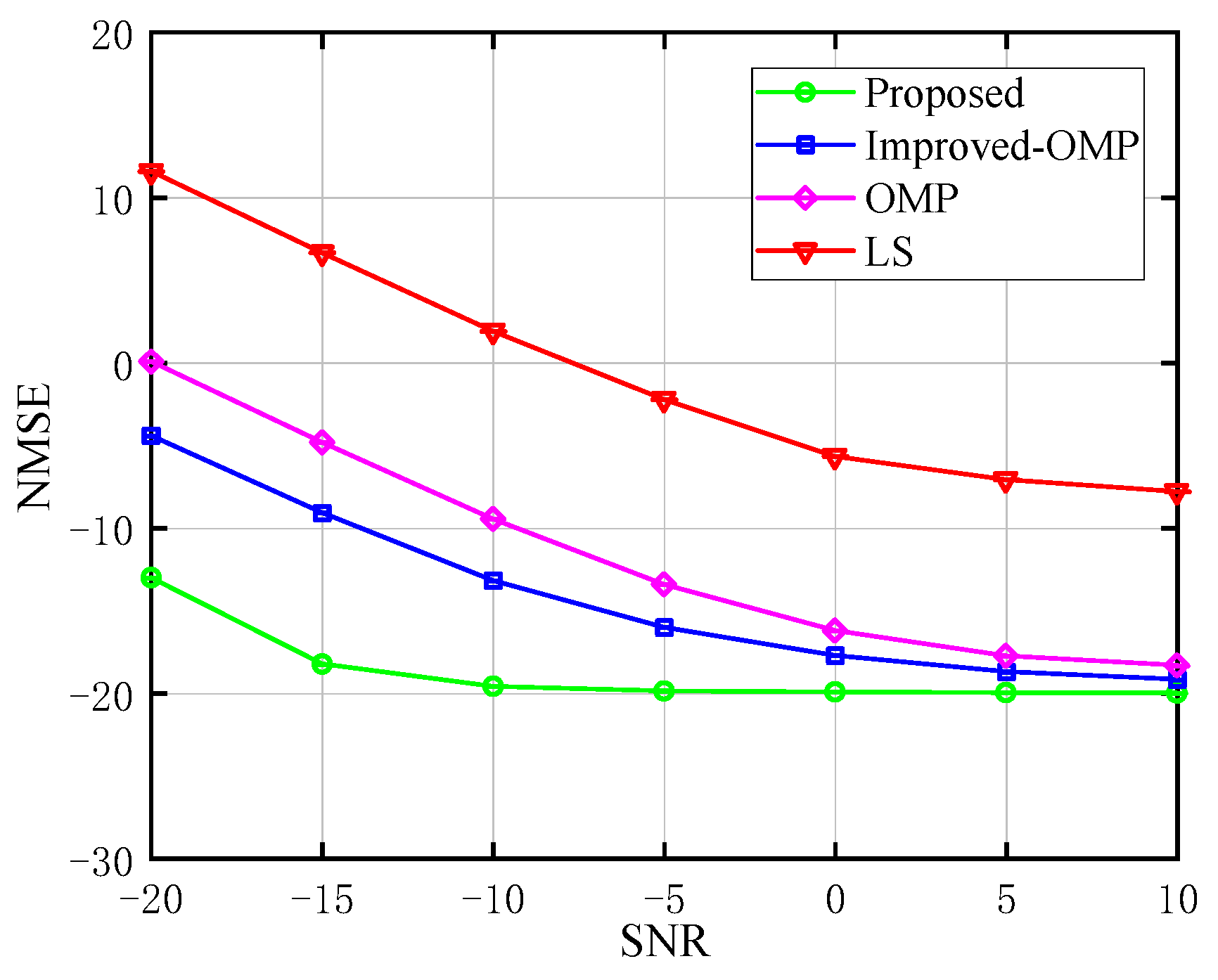
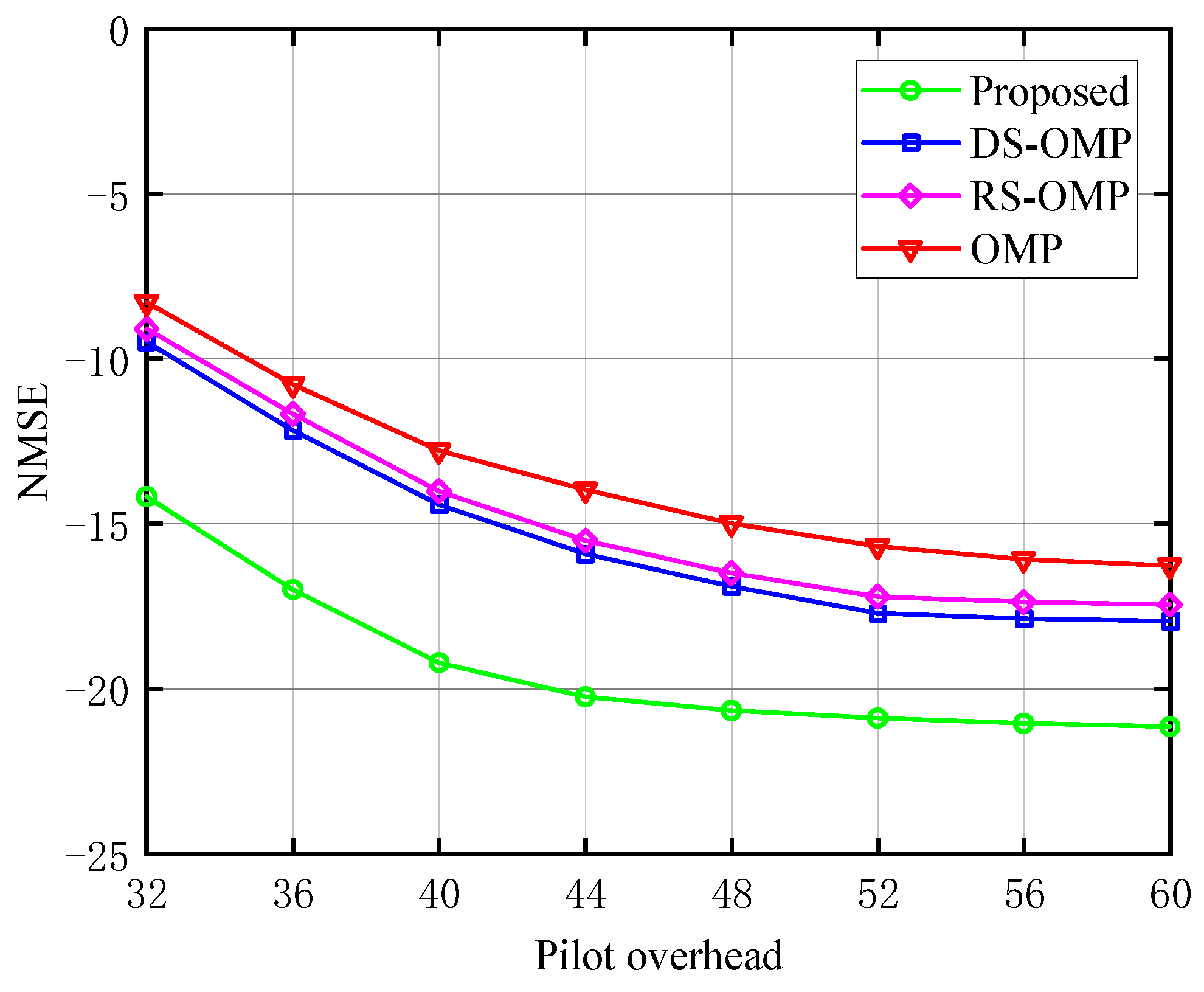
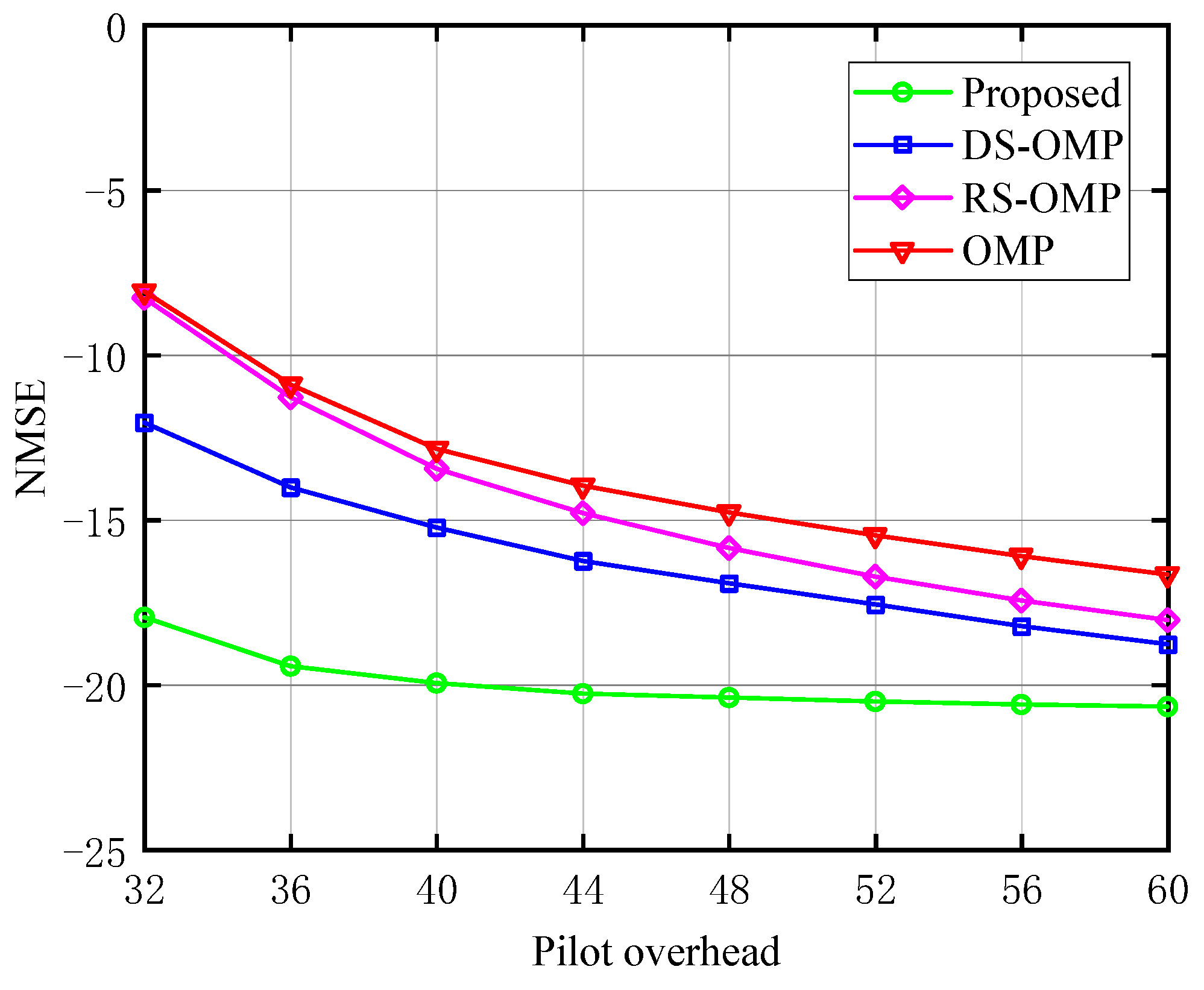
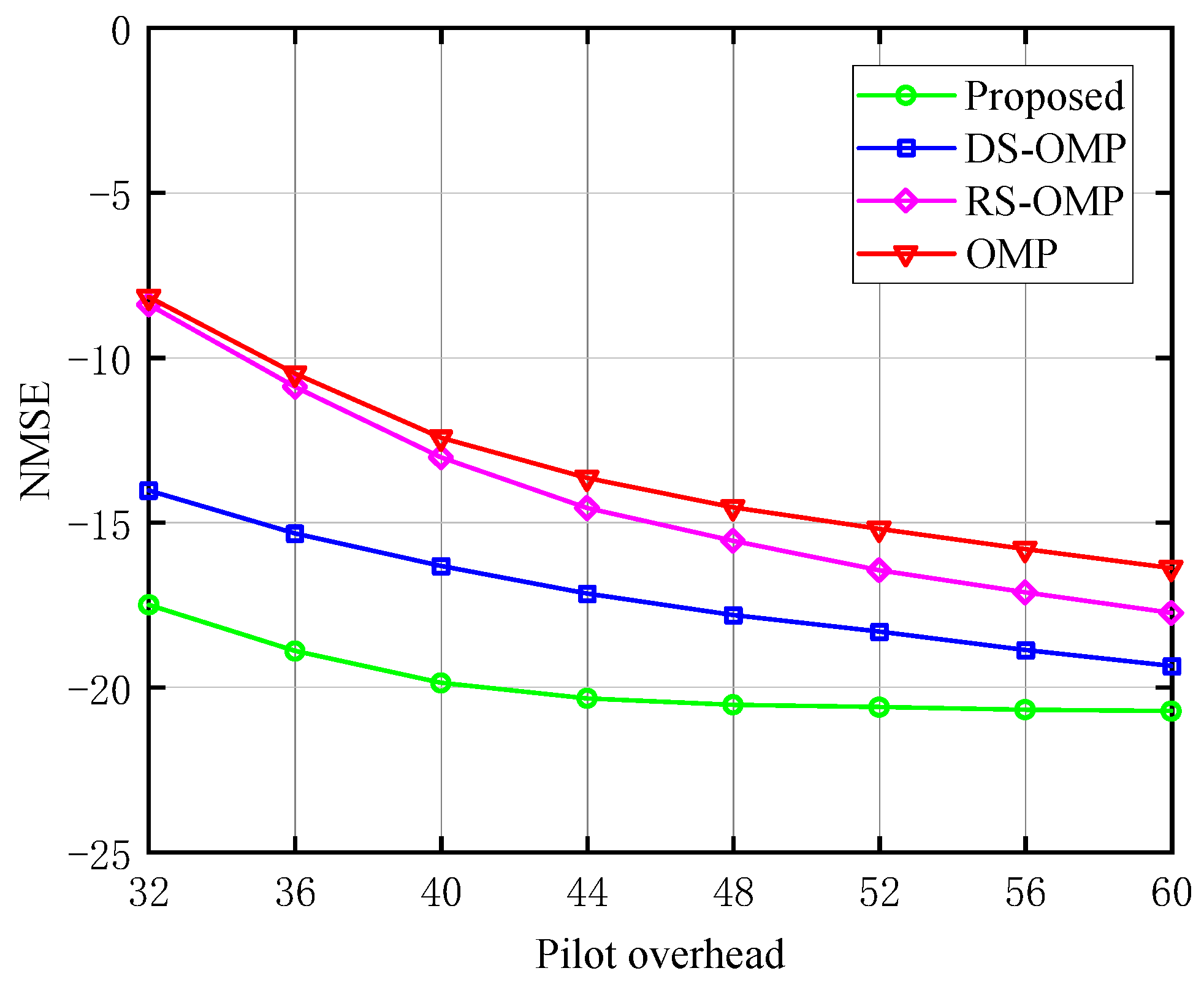
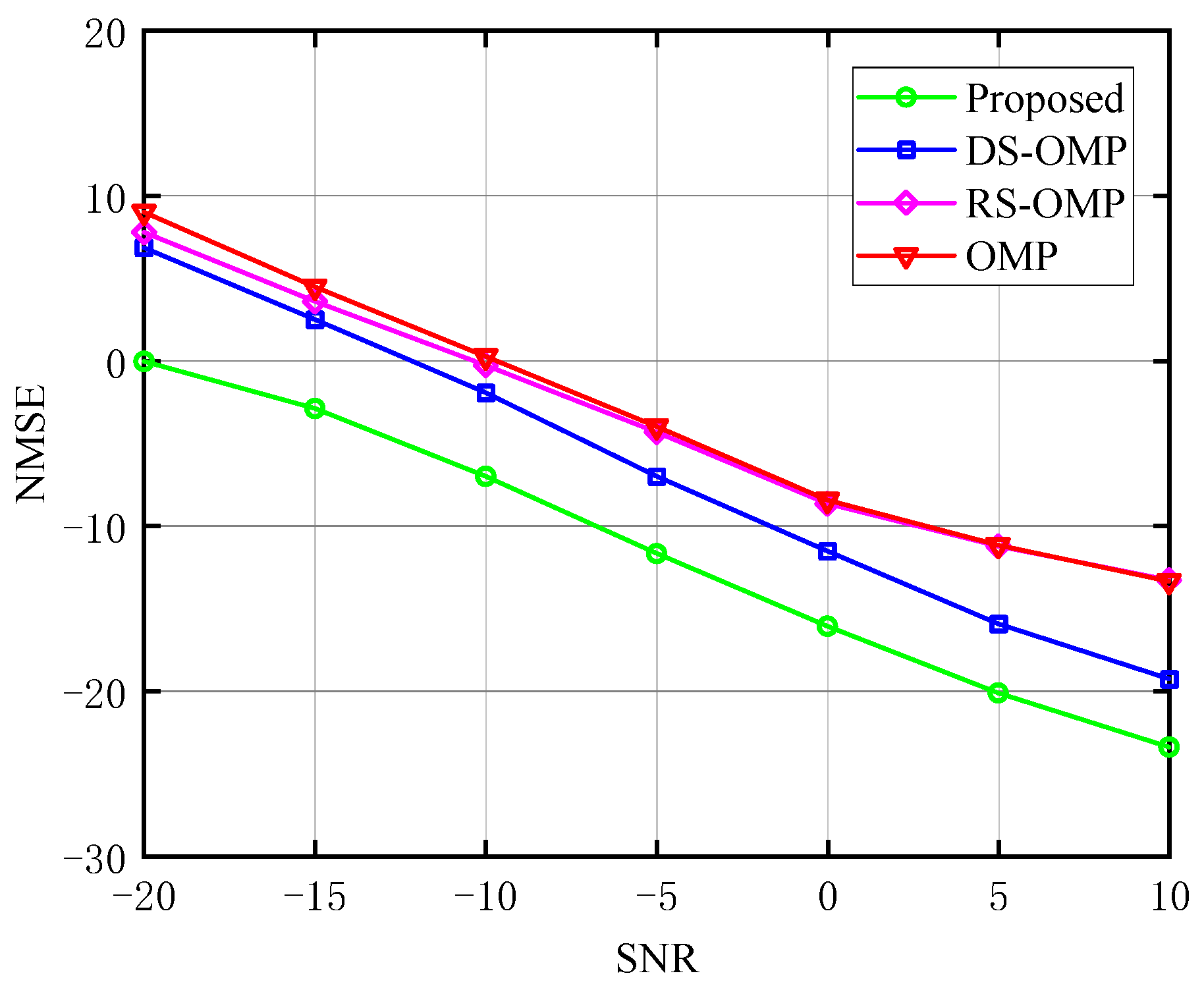
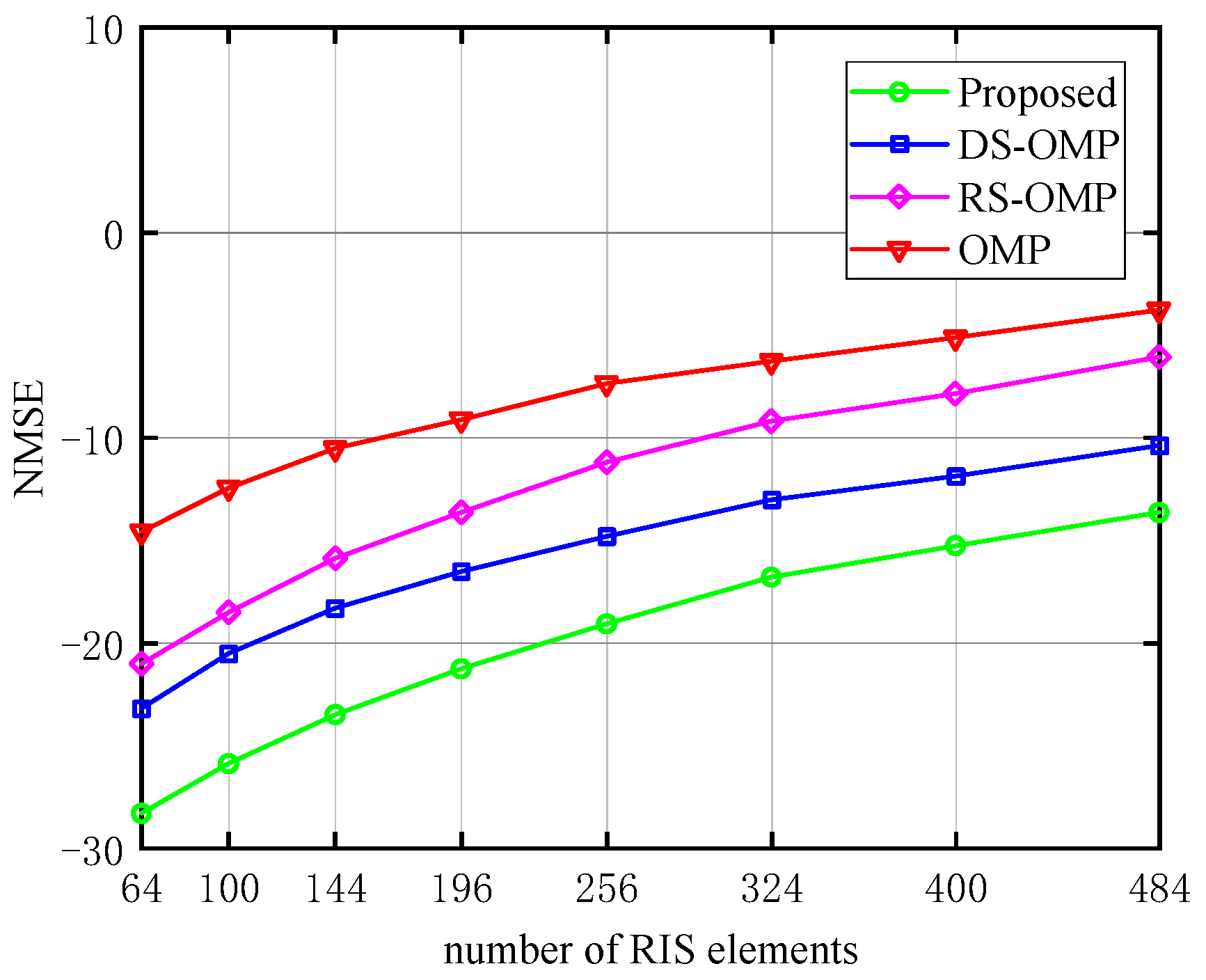
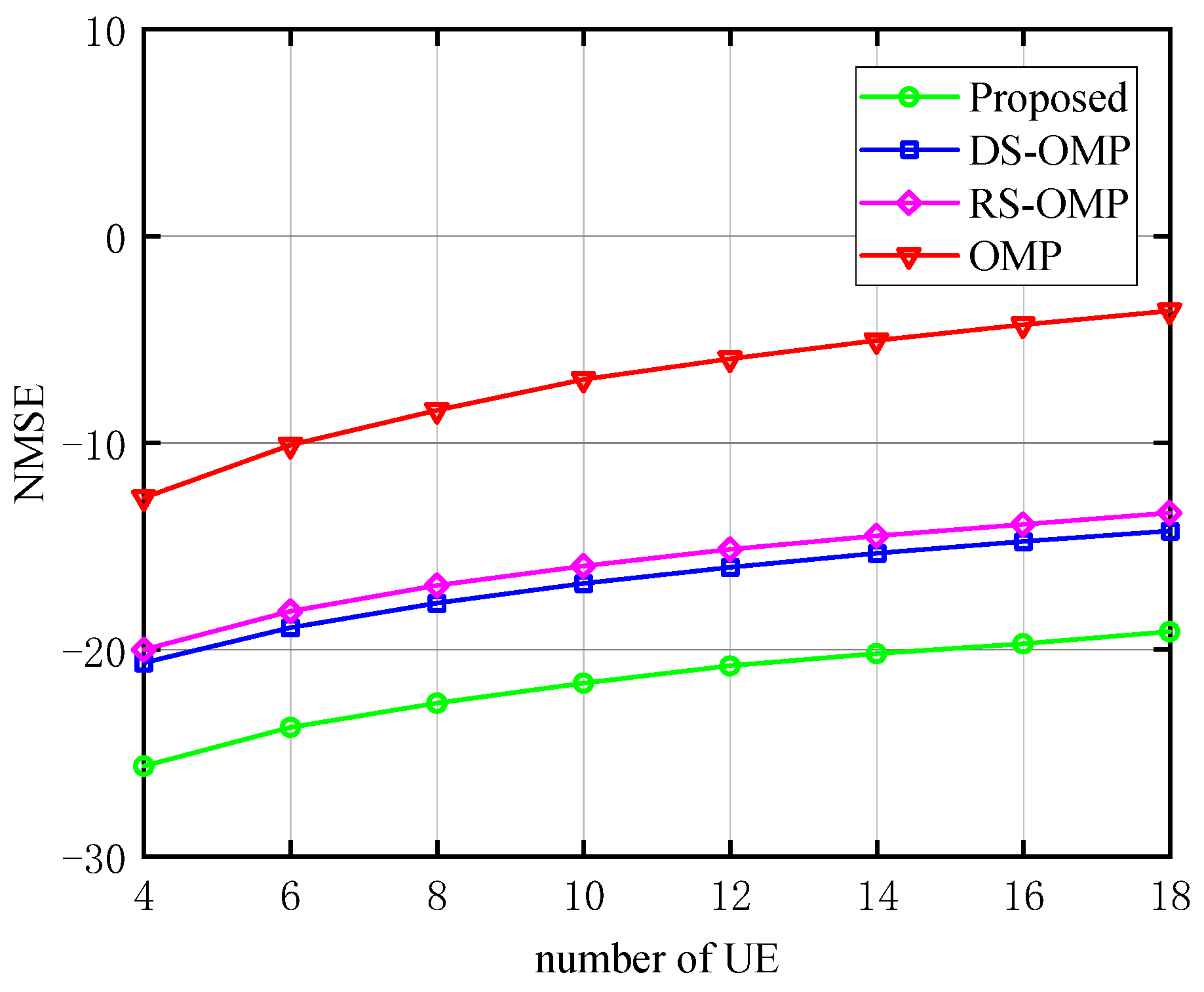
4.2. Cascaded Channel Estimation
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liang, Y.C.; Zhang, Q.Q. Large intelligent surface/antennas (LISA): Making reflective radios smart. J. Commun. Inf. Netw. 2019, 4, 40–50. [Google Scholar] [CrossRef]
- Dai, L.L.; Wang, B.C.; Wang, M. Reconfigurable intelligent surface-based wireless communications: Antenna design, prototyping, and experimental results. IEEE Access 2020, 8, 45913–45923. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, R. Towards smart and reconfigurable environment: Intelligent reflecting surface aided wireless network. IEEE Commun. Mag. 2020, 58, 106–112. [Google Scholar] [CrossRef] [Green Version]
- Gong, S.; Lu, X.; Hoang, D. Toward smart wireless communications via intelligent reflecting surfaces: A contemporary survey. IEEE Commun. Surv. Tut. 2020, 22, 2283–2314. [Google Scholar] [CrossRef]
- Wu, Q.; Zhang, S.; Zhang, B. Intelligent reflecting surface aided wireless communications: A tutorial. IEEE Trans. Commun. 2021, 69, 3313–3351. [Google Scholar] [CrossRef]
- Peng, C.; Deng, H.; Xiao, H.; Qian, Y.; Zhang, W.; Zhang, Y. Two-Stage Channel Estimation for Semi-Passive RIS-Assisted Millimeter Wave Systems. Sensors 2022, 22, 5908. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, X.; Mu, X. Reconfigurable intelligent surfaces: Principles and opportunities. IEEE Commun. Surv. Tutor. 2021, 23, 1546–1577. [Google Scholar] [CrossRef]
- Tang, W.; Chen, M.; Chen, X. Wireless communications with reconfigurable intelligent surface: Path loss modeling and experimental measurement. IEEE Trans. Wirel. Commun. 2021, 20, 421–439. [Google Scholar] [CrossRef]
- Gacanin, H.; di Renzo, M. Wireless 2.0: Toward an intelligent radio environment empowered by reconfigurable meta-surfaces and artificial intelligence. IEEE Veh. Technol. Mag. 2020, 15, 74–82. [Google Scholar] [CrossRef]
- Tang, W.; Chen, X.; Chen, M. Path loss modeling and measurements for reconfigurable intelligent surfaces in the millimeter-wave frequency band. IEEE Trans. Commun. 2022, 70, 6259–6276. [Google Scholar] [CrossRef]
- Mishra, D.; Johansson, H. Channel estimation and low-complexity beamforming design for passive intelligent surface assisted MISO wireless energy transfer. In Proceedings of the 2019 IEEE International Conference on Acoustics, Speech Signal Process (ICASSP’19), Brighton, UK, 12–17 May 2019; pp. 4659–4663. [Google Scholar]
- Jensen, T.L.; Carvalho, E.D. An optimal channel estimation scheme for intelligent reflecting surfaces based on a minimum variance unbiased estimator. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing, Barcelona, Spain, 4–8 May 2020; pp. 5000–5004. [Google Scholar]
- Chen, J.; Liang, H.; Cheng, H.; Yu, W. Channel estimation for reconfigurable intelligent surface aided multi-user MIMO systems. arXiv 2019, arXiv:1912.03619. [Google Scholar] [CrossRef]
- Wang, P.; Fang, J.; Duan, H.; Li, H. Compressed channel estimation for intelligent reflecting surface-assisted millimeter wave systems. IEEE Signal Process. Lett. 2020, 27, 905–909. [Google Scholar] [CrossRef]
- Wei, X.; Shen, D.; Dai, L. Channel estimation for RIS assisted wireless communications—Part II: An improved solution based on double-structured sparsity. IEEE Commun. Lett. 2021, 25, 1403–1407. [Google Scholar] [CrossRef]
- Shi, X.; Wang, J.; Song, J. Triple-Structured Compressive Sensing-Based Channel Estimation for RIS-Aided MU-MIMO Systems. IEEE Trans. Wirel. Commun. 2022, 21, 11095–11109. [Google Scholar] [CrossRef]
- Bayraktar, M.; Palacios, J.; González-Prelcic, N.; Zhang, C. Multidimensional Orthogonal Matching Pursuit-based RIS-aided Joint Localization and Channel Estimation at mmWave. In Proceedings of the 2022 IEEE International Workshop on Signal Processing Advances in Wireless Communication (SPAWC), Oulu, Finland, 4–6 July 2022; pp. 1–5. [Google Scholar]
- Abdallah, A.; Celik, A.; Mansour, M.; Eltawil, A. RIS-Aided mmWave MIMO Channel Estimation Using Deep Learning and Compressive Sensing. IEEE Trans. Wirel. Commun. 2023, 22, 3503–3521. [Google Scholar] [CrossRef]
- Zhu, Z.; Deng, H.; Xu, F.; Zhang, W.; Liu, G.; Zhang, Y. Hybrid Precoding-Based Millimeter Wave Massive MIMO-NOMA Systems. Symmetry 2022, 14, 412. [Google Scholar] [CrossRef]
- Akdeniz, M.R.; Liu, Y.; Samimi, M.K.; Sun, S.; Rangan, S.; Rappaport, T.S.; Erkip, E. Millimeter Wave Channel Modeling and Cellular Capacity Evaluation. IEEE J. Sel. Areas Commun. 2014, 32, 1164–1179. [Google Scholar] [CrossRef]
- Ayach, O.E.; Rajagopal, S.; Abu-Surra, S.; Pi, Z.; Heath, R.W. Spatially Sparse Precoding in Millimeter Wave MIMO Systems. IEEE Trans. Wirel. Commun. 2014, 13, 1499–1513. [Google Scholar] [CrossRef] [Green Version]
- Lee, J.; Gil, G.T.; Lee, Y.H. Channel estimation via orthogonal matching pursuit for hybrid MIMO systems in millimeter wave communications. IEEE Trans. Commun. 2016, 64, 2370–2386. [Google Scholar] [CrossRef]
- Zhao, P.; Ma, K.; Wang, Z.; Chen, S. Virtual angular-domain channel estimation for FDD based massive MIMO systems with partial orthogonal pilot design. IEEE Trans. Veh. Technol. 2020, 69, 5164–5178. [Google Scholar] [CrossRef] [Green Version]
- Hu, C.; Dai, L.; Mir, T.; Fang, J. Super-resolution channel estimation for mmWave massive MIMO with hybrid precoding. IEEE Trans. Veh. Technol. 2018, 67, 8954–8958. [Google Scholar] [CrossRef] [Green Version]
- Munshi, A.; Unnikrishnan, S. Performance analysis of compressive sensing based LS and MMSE channel estimation algorithm. J. Commun. Softw. Syst. 2021, 17, 13–19. [Google Scholar] [CrossRef]
- Mirzaei, J.; Sohrabi, F.; Adve, R.; ShahbazPanahi, S. MMSE-based channel estimation for hybrid beamforming massive MIMO with correlated channels. In Proceedings of the 2020 IEEE International Conference on Acoustics, Speech Signal Process (ICASSP’20), Barcelona, Spain, 4–9 May 2020; pp. 5015–5019. [Google Scholar]
- Khlifi, A.; Bouallegue, R. Performance analysis of LS and LMMSE channel estimation techniques for LTE downlink systems. arXiv 2011, arXiv:1111.1666. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Deng, H.; Peng, C. Channel Estimation for RIS-Assisted MIMO Systems in Millimeter Wave Communications. Sensors 2023, 23, 5516. https://doi.org/10.3390/s23125516
Liu Y, Deng H, Peng C. Channel Estimation for RIS-Assisted MIMO Systems in Millimeter Wave Communications. Sensors. 2023; 23(12):5516. https://doi.org/10.3390/s23125516
Chicago/Turabian StyleLiu, Ying, Honggui Deng, and Chengzuo Peng. 2023. "Channel Estimation for RIS-Assisted MIMO Systems in Millimeter Wave Communications" Sensors 23, no. 12: 5516. https://doi.org/10.3390/s23125516