
The Performance Investigation of Smart Diagnosis for Bearings Using Mixed Chaotic Features with Fractional Order
 ,
,
Abstract
:1. Introduction
2. Data Processing
2.1. Data Resource
2.2. Data Processing
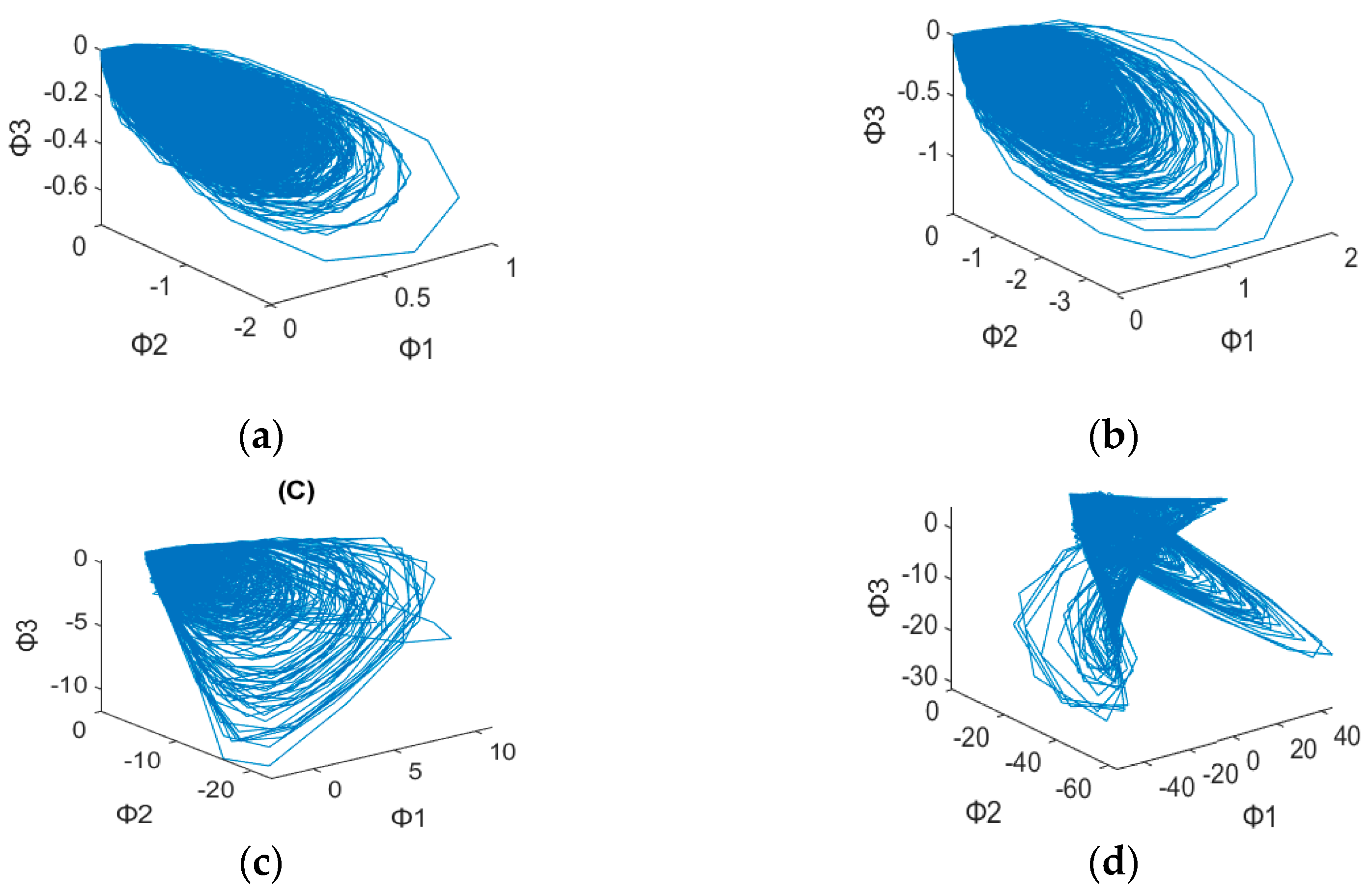
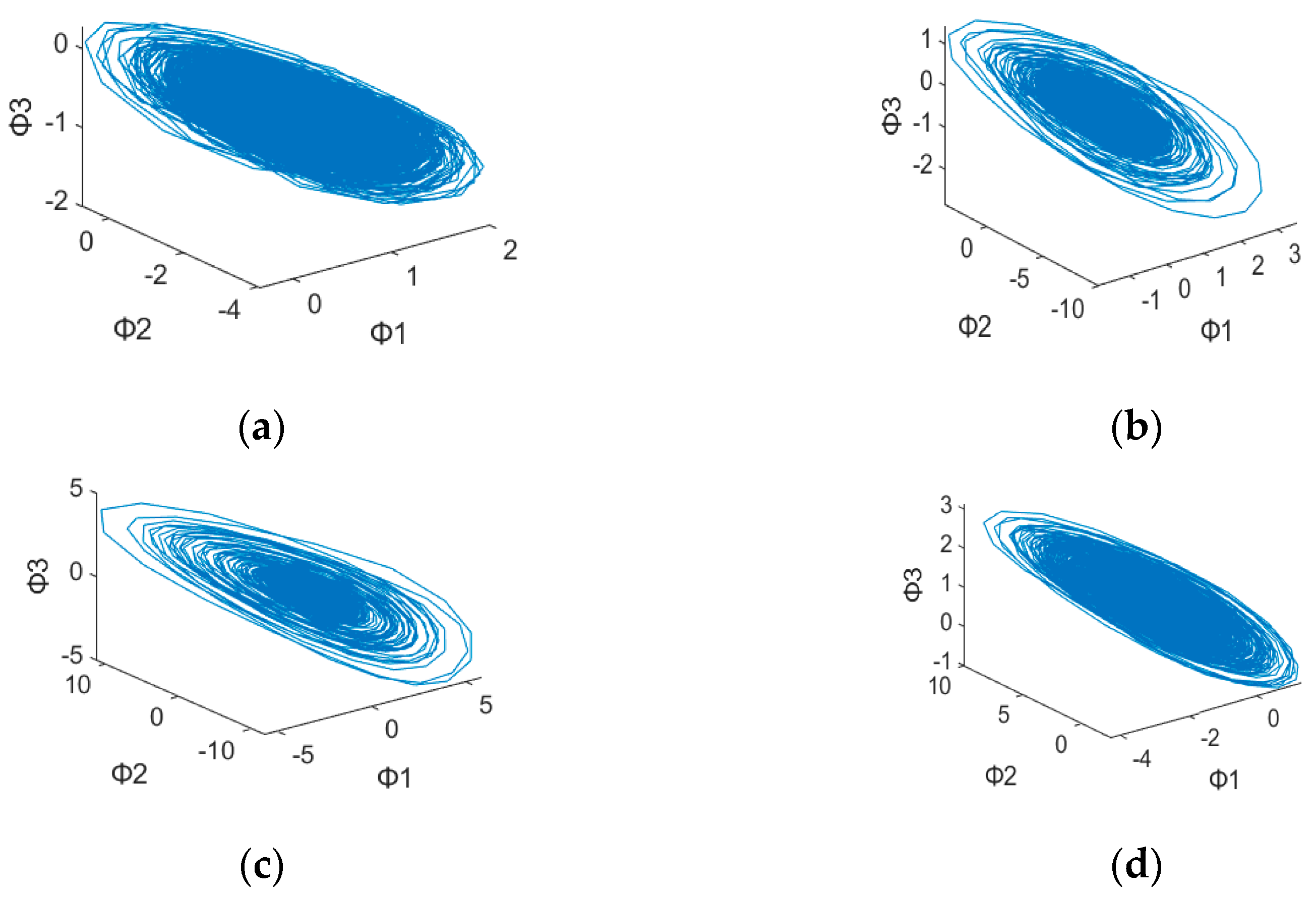
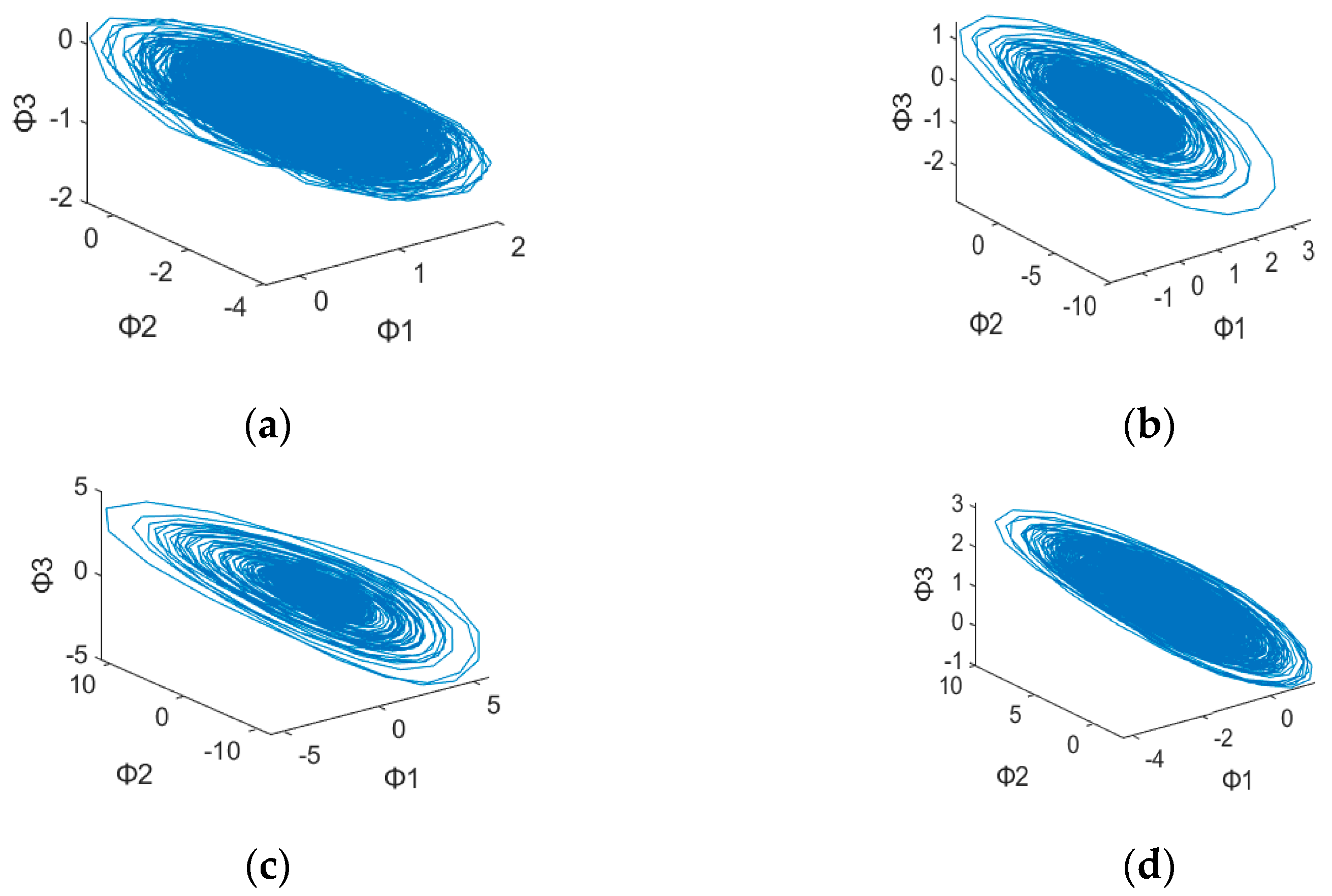
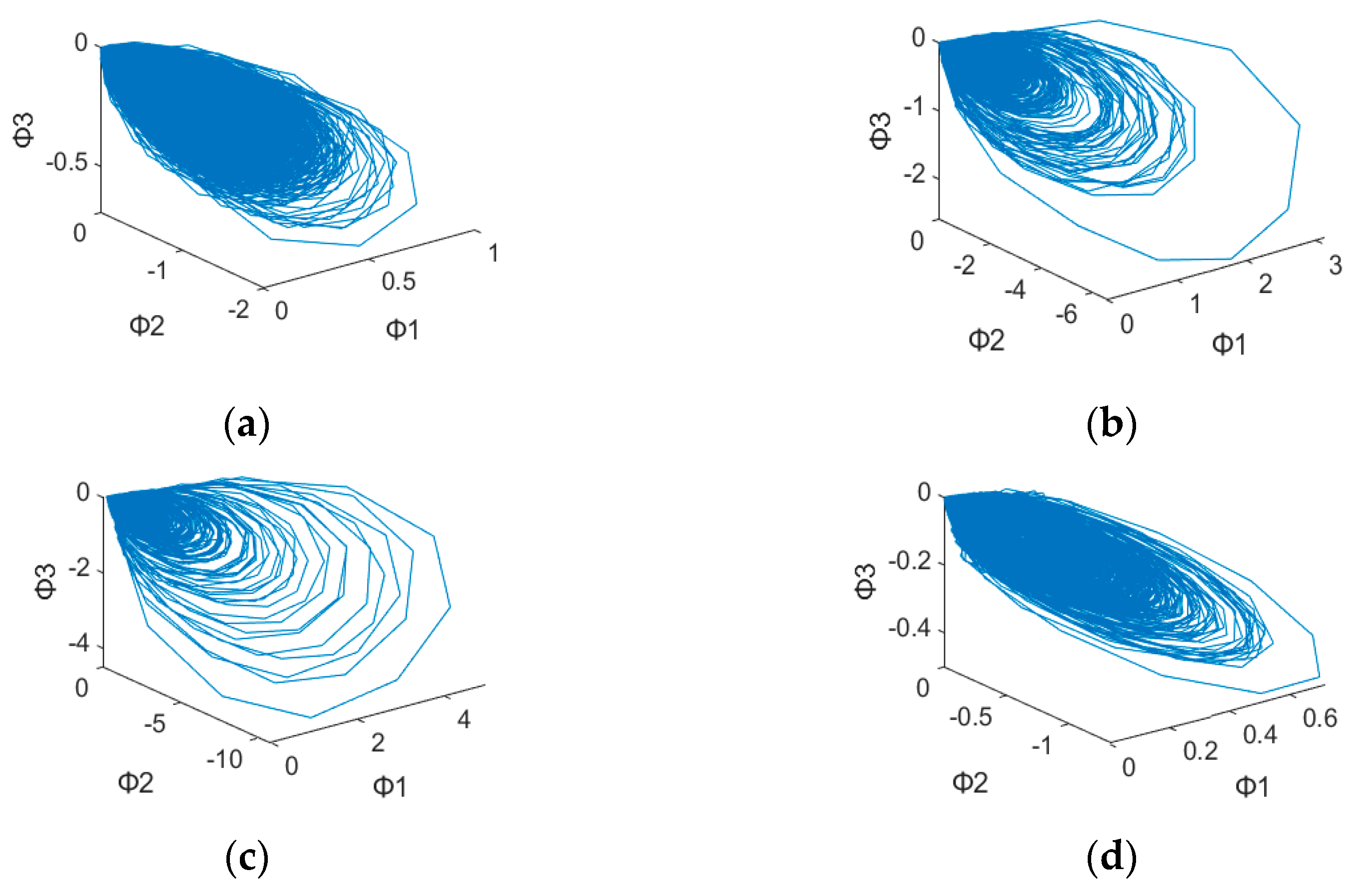
3. Chaotic Master–Slave System
3.1. Chaos Theory
3.2. Chaotic Mapping
4. Feature Extraction—Five Feature Extraction Methods for Performance Investigation
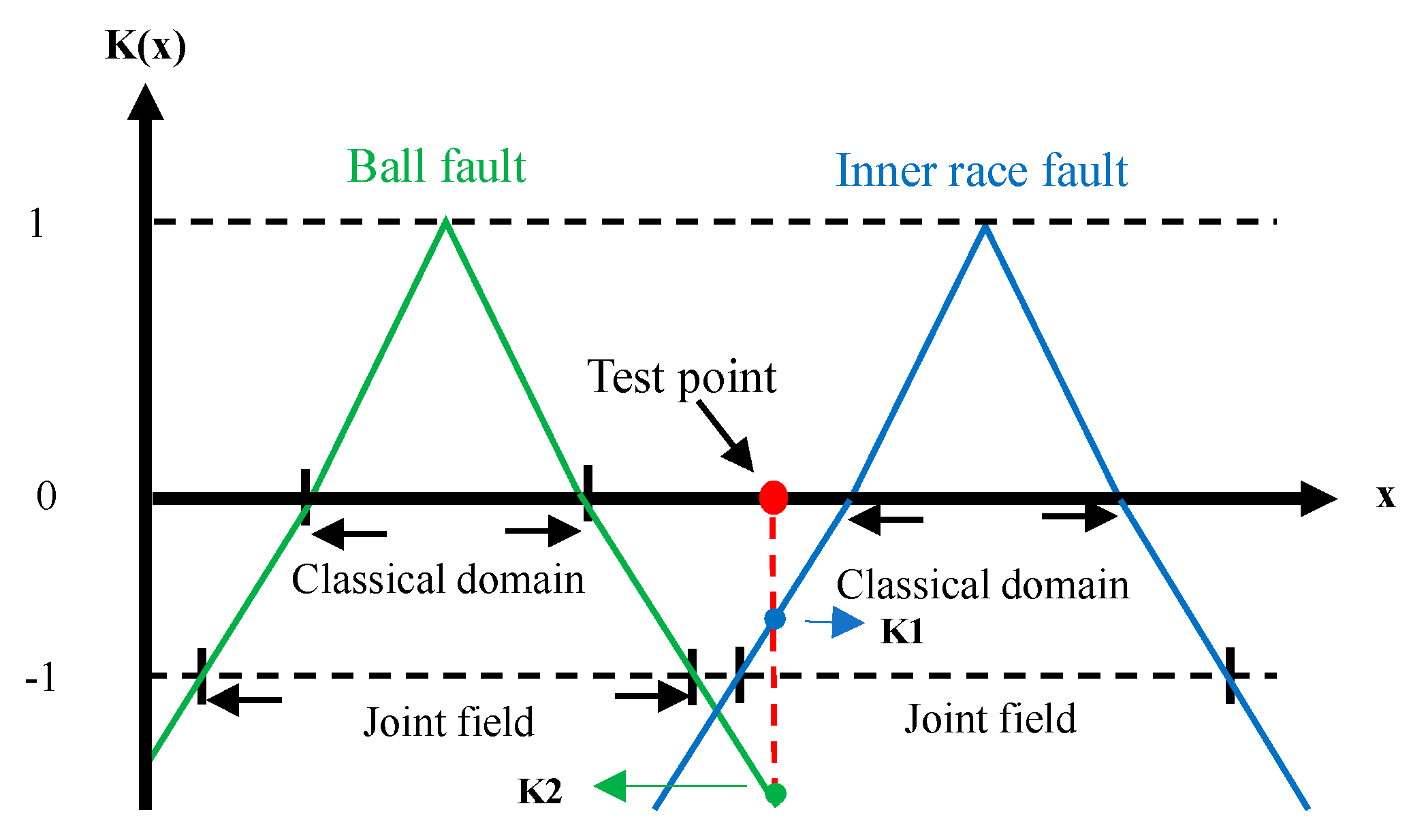
5. Extension Theory
6. Experimental Results
- Use pre-processed training and testing data to generate dynamic errors in the Chen–Lee chaotic mapping system.
- Calculate the characteristics of dynamic errors based on the variety of the methods of feature extraction.
- Set the classical domain and joint field by continuously training the characteristics.
- Calculate the correlation functions of the different testing conditions with the testing characteristics, classical domain, and joint field in extension theory.
- Compare the values of the correlation functions to determine the testing data (i.e., the vibration signal of the normal state, the ball fault state, the inner race fault state, and the outer race fault state).
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sun, F.; Wei, Z. Rolling Bearing Fault Diagnosis Based on Wavelet Packet and RBF Neural Network. In Proceedings of the 2007 Chinese Control Conference, CCC Chinese, Zhangjiajie, China, 26–31 July 2007; pp. 451–455. [Google Scholar]
- Banks, J.; Brooks, J.; Cairns, G.; Davis, G.; Stacy, P. On Devaney’s definition of chaos. In The American Mathematical Monthly; Mathematical Association of America: Washington, DC, USA, 1992; Volume 99, pp. 332–334. [Google Scholar]
- Shifat, T.A.; Hur, J.W. An effective stator fault diagnosis framework of BLDC motor based on vibration and current signals. IEEE Access 2020, 8, 106968–106981. [Google Scholar] [CrossRef]
- Glowacz, A.; Tadeusiewicz, R.; Legutko, S.; Caesarendra, W.; Irfan, M.; Liu, H.; Brumercik, F.; Gutten, M.; Sulowicz, M.; Daviu, J.A.A.; et al. Fault diagnosis of angle grinders and electric impact drills using acoustic signals. Appl. Acoust. 2021, 179, 108070. [Google Scholar] [CrossRef]
- Chen, H.Y.; Lee, C.H. Vibration signals analysis by explainable artificial intelligence (XAI) approach: Application on bearing faults diagnosis. IEEE Access 2020, 8, 134246–134256. [Google Scholar] [CrossRef]
- Strömbergsson, D.; Marklund, P.; Berglund, K.; Larsson, P.E. Bearing monitoring in the wind turbine drivetrain: A comparative study of the FFT and wavelet transforms. Wind. Energy 2020, 23, 1381–1393. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Z.; Wang, Y.; Wang, K. Fault diagnosis and prognosis using wavelet packet decomposition, Fourier transform and artificial neural network. J. Intel. Manuf. 2013, 24, 1213–1227. [Google Scholar] [CrossRef]
- Li, L.; Cai, H.; Han, H.; Jiang, Q.; Ji, H. Adaptive short-time Fourier transform and synchrosqueezing transform for non-stationary signal separation. Signal Process. 2020, 166, 107231. [Google Scholar] [CrossRef]
- Zhang, N.; Li, Y.; Yang, X.; Zhang, J. Bearing Fault Diagnosis Based on BP Neural Network and Transfer Learning. J. Phys. Conf. Ser. 2021, 1881, 022084. [Google Scholar] [CrossRef]
- Guo, J.; Liu, X.; Li, S.; Wang, Z. Bearing intelligent fault diagnosis based on wavelet transform and convolutional neural network. Shock Vib. 2020, 2020, 6380486. [Google Scholar] [CrossRef]
- Song, Y.H.; Zeng, S.K.; Ma, J.M. A fault diagnosis method for roller bearing based on empirical wavelet transform decomposition with adaptive empirical mode segmentation. Measurement 2018, 117, 266–276. [Google Scholar] [CrossRef]
- Lu, Y.; Du, J.; Tao, X. Fault diagnosis of rolling bearing based on resonance-based sparse signal decomposition with optimal Q-factor. Meas. Control 2019, 52, 1111–1121. [Google Scholar] [CrossRef] [Green Version]
- Yau, H.T.; Wu, S.Y.; Chen, C.L.; Li, Y.C. Fractional-order chaotic self-synchronization-based tracking faults diagnosis of ball bearing systems. IEEE Trans. Ind. Electron. 2016, 63, 3824–3833. [Google Scholar] [CrossRef]
- Chen, H.C.; Yau, H.T.; Chen, P.Y. Chaos synchronization error technique-based defect pattern recognition for GIS through partial discharge signal analysis. Entropy 2014, 16, 4566–4582. [Google Scholar] [CrossRef] [Green Version]
- Li, S.Y.; Gu, K.R. A Smart Fault-detection Approach with Feature Production and Extraction Processes. Inf. Sci. 2020, 513, 553–564. [Google Scholar] [CrossRef]
- Li, S.Y.; Gu, K.R.; Chieh, H.S. A Chaotic System-based Signal Identification Technology: Fault-Diagnosis of Industrial Bearing System. Measurement 2021, 171, 108832. [Google Scholar] [CrossRef]
- Li, S.Y.; Lin, Y.C.; Tam, L.M. A smart detection technology for personal ECG monitoring via chaos-based data mapping strategy. Multimed. Tools Appl. 2021, 80, 6397–6412. [Google Scholar] [CrossRef]
- Hamadache, M.; Jung, J.H.; Park, J.; Youn, B.D. A comprehensive review of artificial intelligence-based approaches for rolling element bearing PHM: Shallow and deep learning. JMST Adv. 2019, 1, 125–151. [Google Scholar] [CrossRef] [Green Version]
- Pham, T.A.; Tran, V.Q.; Vu, H.L.T.; Ly, H.B. Design deep neural network architecture using a genetic algorithm for estimation of pile bearing capacity. PLoS ONE 2020, 15, e0243030. [Google Scholar] [CrossRef]
- Ding, H.; Yang, L.; Cheng, Z.; Yang, Z. A remaining useful life prediction method for bearing based on deep neural networks. Measurement 2021, 172, 108878. [Google Scholar] [CrossRef]
- Zhang, S.; Zhang, S.; Wang, B.; Habetler, T.G. Deep learning algorithms for bearing fault diagnostics—A comprehensive review. IEEE Access 2020, 8, 29857–29881. [Google Scholar] [CrossRef]
- Lorenz, E.N. Deterministic Nonperiodic Flow. J. Atmos. Sci. 2020, 2, 130–141. [Google Scholar]
- Cuomo, K.M.; Oppenheim, A.V. Circuit Implementation of Synchronized Chaos with Applications to Communications. Phys. Rev. Lett. 1993, 71, 65–68. [Google Scholar] [CrossRef]
- Meng, X.; Ni, J.; Zhu, Y. Research on Vibration Signal Filtering Based on Wavelet Multi-resolution Analysis. In Proceedings of the 2010 International Conference on Artificial Intelligence and Computational Intelligence, Sanya, China, 23–24 October 2010; Volume 2, pp. 115–118. [Google Scholar]
- Chang, Y.C.; Chen, S.M.; Liau, C.J. Fuzzy Interpolative Rea soning for Sparse Fuzzy-Rule-Based Systems Based on the Areas of Fuzzy Sets. IEEE Trans. Fuzzy Syst. 2008, 16, 1285–1301. [Google Scholar] [CrossRef]
- Cai, W. Extension set, fuzzy set and classical set. In Proceedings of the 1st Congress of International Fuzzy System Association, Palma de Mallorca, Spain, 4–6 July 1985. [Google Scholar]
- Cai, W. Extension Set and Incompatible Problems. Sci. Explor. 1983, 3, 83–89. [Google Scholar]
- Case Western Reserve University Bearing Data Center. 2010. Available online: http://csegroups.case.edu/bearingdatacenter/page/welcomecase-western-reserve-university-bearing-data-center-websi (accessed on 19 August 2022).
- Chen, H.; Li, C. Anti-control of chaos in rigid body motion. Chaos Solitons Fractals 2004, 21, 957–965. [Google Scholar] [CrossRef]
- Hui, W.M. Application of extension theory to vibration fault diagnosis of generator sets. IEE Proc. Gener. Transm. Distrib. 2004, 151, 503–508. [Google Scholar]
- Wang, M.H.; Chen, H.C. Application of extension theoryto the fault diagnosis of power transformers. In Proceeding of the 22nd Symposium on Electrical Power Engineering, Kaohsiung, Taiwan, 21–22 November 2001; pp. 797–800. [Google Scholar]
- Huang, Y.P.; Chen, H.J. The extension-based fuzzy modelingmethod and its applications. In Proceedings of the 1999 IEEE Canadian Conference on Electrical and Computer Engineering, Edmonton, AB, Canada, 9–12 May 1999; pp. 977–982. [Google Scholar]
- Li, J.; Wang, S. Primary Research on Extension Control and System; International Academic Publishers: New York, NY, USA, 1991. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Types |
|---|---|
| Sampling rate | 48 k (Hz) |
| Motor load | 0/1/2/3 (Hp) |
| SPOF diameter | 0.007/0.014/0.021 (in) |
| SPOF depth | 0.011 (in) |
| Type of fault | Normal/Inner Race Fault/Ball Fault/Outer Race Fault |
| Training Data | Testing Data | |
|---|---|---|
| Motor load 0 Hp with different diameters of faults | 48,000–144,000th | 144,001–240,000th |
| Motor load 1/2/3 Hp with different diameters of faults | 48,000–264,000th | 264,001–480,000th |
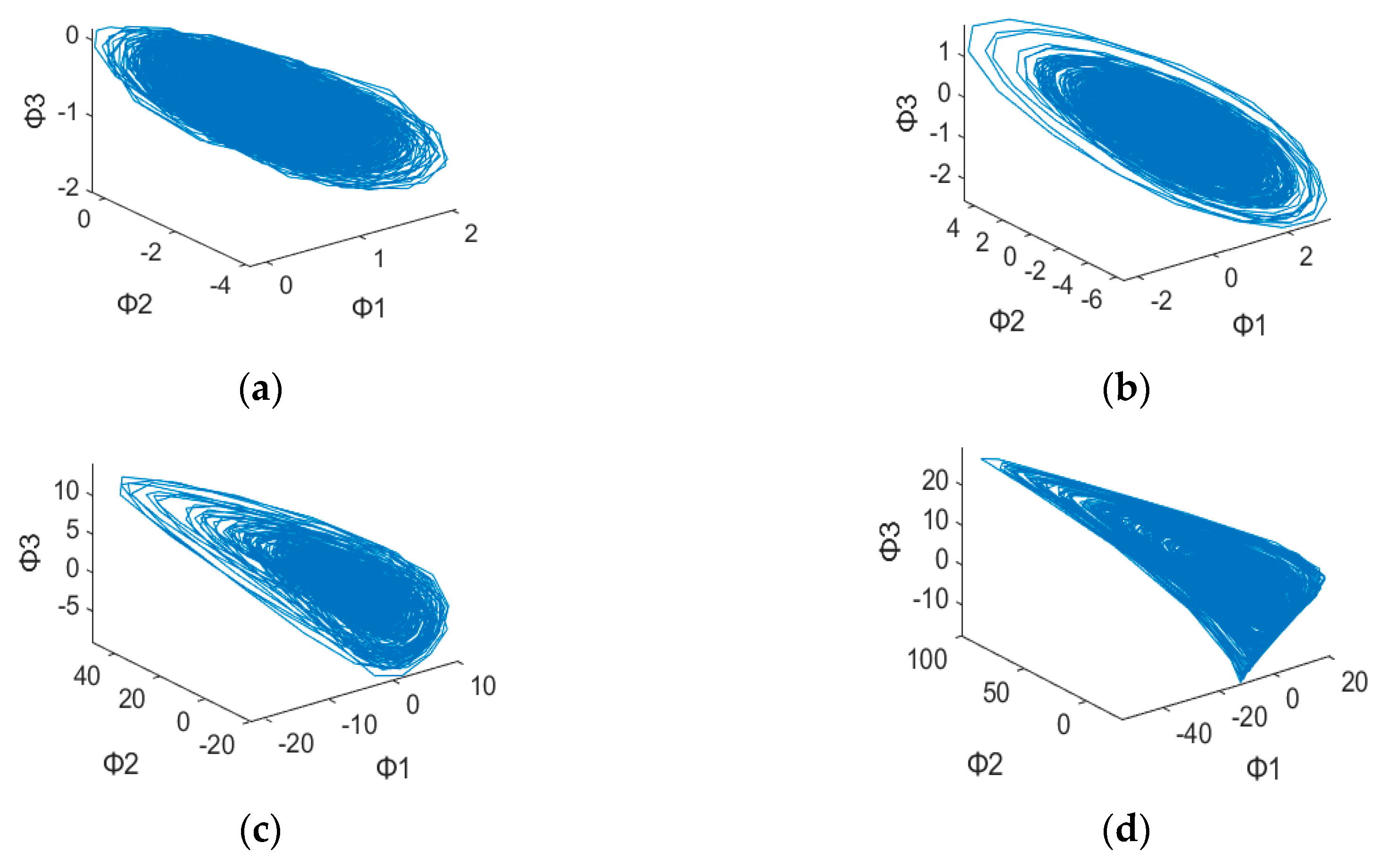
| Figure\State | SPOF | α |
|---|---|---|
| Figure 3 | 0.007 in | α = 0 |
| Figure 4 | 0.007 in | α = 0.3 |
| Figure 5 | 0.007 in | α = 0.6 |
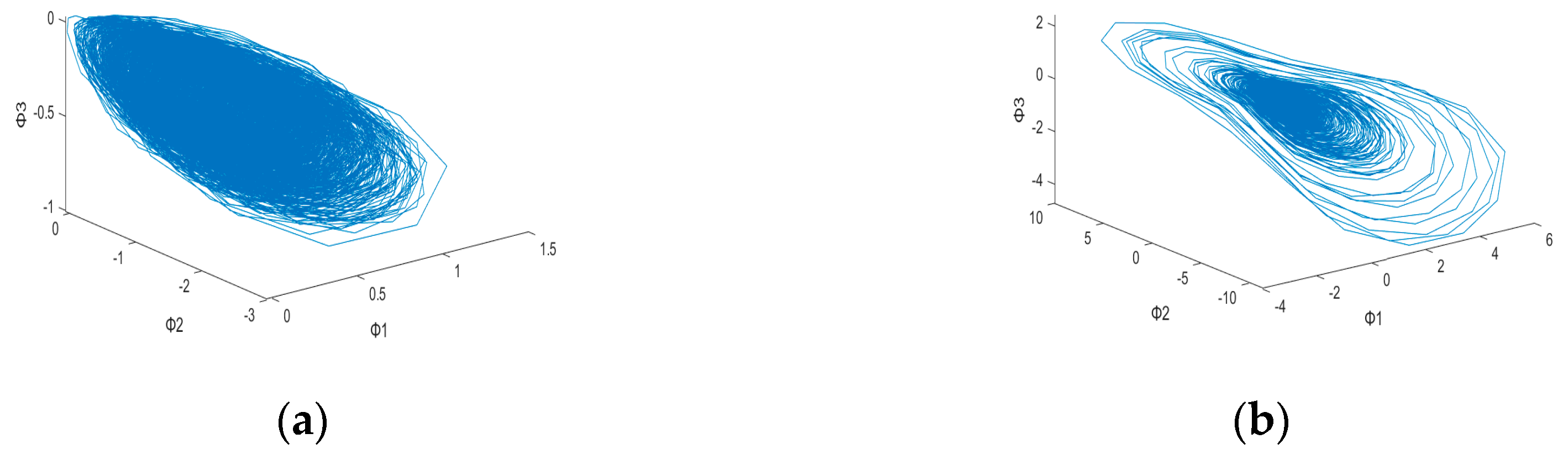
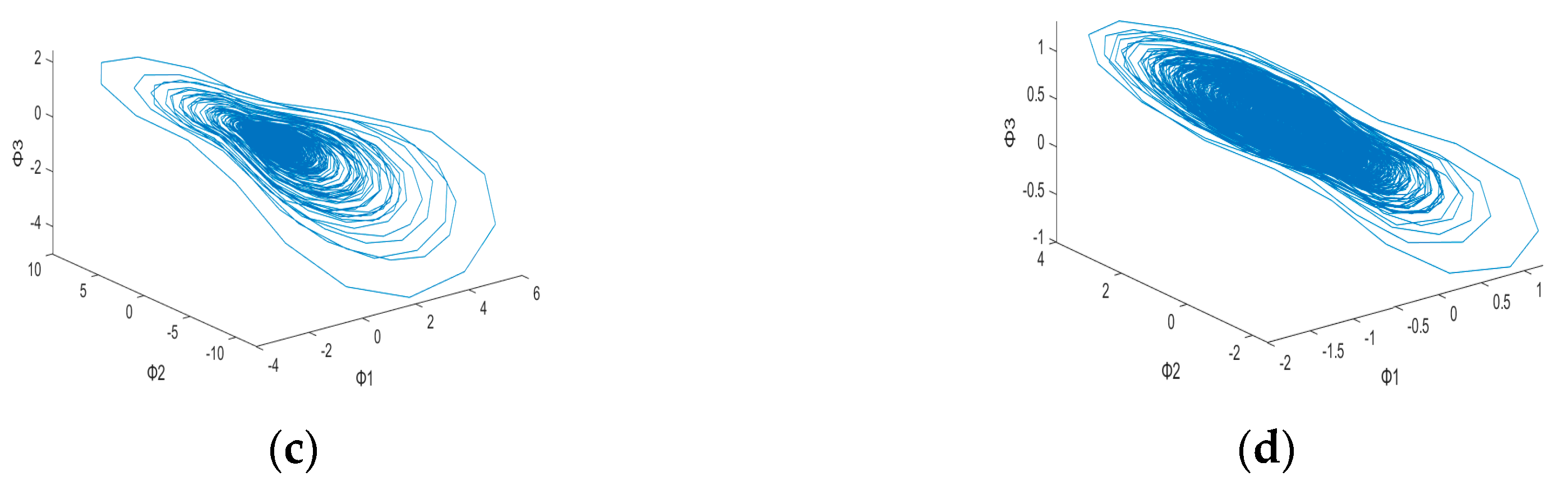
| Figure 6 | 0.014 in | α = 0 |
| Figure 7 | 0.014 in | α = 0.3 |
| Figure 8 | 0.014 in | α = 0.6 |
| State | Classical Domain | Joint Field |
|---|---|---|
| Normal | X <3.336 4.811> Y <1.071 1.090> | X <2.968 5.179> Y <1.066 1.095> |
| Ball fault | X <1106 1464> Y <1.204 1.275> | X <1017 1554> Y <1.186 1.293> |
| Inner race fault | X <16.69 30.97> Y <1.028 1.062> | X <13.12 34.55> Y <1.020 1.070> |
| Outer race fault | X <7383 9604> Y <1.574 1.649> | X <6828 10,158> Y <1.555 1.669> |
| State | Classical Domain | Joint Field |
|---|---|---|
| Normal | X <3.336 4.811> Y <1.071 1.090> | X <2.968 5.179> Y <1.066 1.095> |
| Ball fault | X <1106 1464> Y <1.204 1.275> | X <1017 1554> Y <1.186 1.293> |
| Inner race fault | X <16.69 30.97> Y <1.028 1.062> | X <13.12 34.55> Y <1.020 1.070> |
| Outer race fault | X <7383 9604> Y <1.574 1.649> | X <6828 10,158> Y <1.555 1.669> |
| State | Classical Domain | Joint Field |
|---|---|---|
| Normal | X <2.756 6.106> Y <1.066 1.101> | X <1.919 6.944> Y <1.058 1.109> |
| Ball fault | X <222.0 287.0> Y <1.277 1.330> | X <205.8 303.3> Y <1.264 1.343> |
| Inner race fault | X <13.50 24.10> Y <1.125 1.184> | X <10.85 26.75> Y <1.109 1.199> |
| Outer race fault | X <4568 6023> Y <1.598 1.690> | X <4204 6387> Y <1.575 1.713> |
| State | Classical Domain | Joint Field |
|---|---|---|
| Normal | X <3.000 4.538> Y <1.059 1.116> | X <2.615 4.922> Y <1.045 1.130> |
| Ball fault | X <183.5 237.6> Y <1.303 1.349> | X <170.0 251.1> Y <1.291 1.361> |
| Inner race fault | X <12.42 27.98> Y <1.132 1.184> | X <8.531 31.87> Y <1.118 1.197> |
| Outer race fault | X <4976 6454> Y <1.602 1.670> | X <4606 6824> Y <1.585 1.687> |
| Method | Method 1 | Method 2 | Method 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SPOF Diameter (10−3 in) | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 |
| Normal (%) | 100 | 100 | 100 | 100 | 83.9 | 98.2 | 100 | 80.2 | 92.4 |
| Ball fault (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Inner race fault (%) | 100 | 59.9 | 100 | 100 | 88.4 | 100 | 100 | 65 | 100 |
| Outer race fault (%) | 100 | 0 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Average (%) | 100 | 64.9 | 100 | 100 | 93.1 | 99.6 | 100 | 86.3 | 98.1 |
| Method | Method 1 | Method 2 | Method 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SPOF Diameter (10−3 in) | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 |
| Normal (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 90.9 | 100 |
| Ball fault (%) | 100 | 89.9 | 90.4 | 100 | 68.8 | 100 | 100 | 88.7 | 100 |
| Inner race fault (%) | 100 | 91.9 | 84.2 | 100 | 100 | 100 | 100 | 91.1 | 100 |
| Outer race fault (%) | 100 | 100 | 100 | 100 | 71.4 | 100 | 100 | 92.7 | 100 |
| Average (%) | 100 | 95.5 | 93.6 | 100 | 85.1 | 100 | 100 | 90.8 | 100 |
| Method | Method 1 | Method 2 | Method 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SPOF Diameter (10−3 in) | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 |
| Normal (%) | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 | 100 |
| Ball fault (%) | 100 | 100 | 100 | 100 | 71.3 | 100 | 100 | 100 | 100 |
| Inner race fault (%) | 100 | 0 | 100 | 100 | 88.6 | 100 | 100 | 0 | 0 |
| Outer race fault (%) | 100 | 0 | 100 | 100 | 51.3 | 100 | 100 | 0 | 100 |
| Average (%) | 100 | 50 | 100 | 100 | 77.8 | 100 | 100 | 50 | 75 |
| Method | Method 1 | Method 2 | Method 3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| SPOF Diameter (10−3 in) | 7 | 14 | 21 | 7 | 14 | 21 | 7 | 14 | 21 |
| Normal (%) | 100 | 100 | 100 | 100 | 87.6 | 88 | 100 | 76.3 | 85.7 |
| Ball fault (%) | 100 | 100 | 100 | 100 | 98.5 | 100 | 100 | 100 | 100 |
| Inner race fault (%) | 100 | 0 | 100 | 100 | 69.7 | 98.7 | 100 | 0 | 0 |
| Outer race fault (%) | 100 | 0 | 96.6 | 100 | 68.2 | 100 | 100 | 6.4 | 100 |
| Average (%) | 100 | 50 | 99.1 | 100 | 81 | 96.6 | 100 | 46.5 | 71.4 |
| Method | Method 1 | Method 2 | Method 3 |
|---|---|---|---|
| Total Average Accuracy (%) | 87.8 | 94.4 | 84.8 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, S.-Y.; Tam, L.-M.; Wu, S.-P.; Tsai, W.-L.; Hu, C.-W.; Cheng, L.-Y.; Xu, Y.-X.; Cheng, S.-C. The Performance Investigation of Smart Diagnosis for Bearings Using Mixed Chaotic Features with Fractional Order. Sensors 2023, 23, 3801. https://doi.org/10.3390/s23083801
Li S-Y, Tam L-M, Wu S-P, Tsai W-L, Hu C-W, Cheng L-Y, Xu Y-X, Cheng S-C. The Performance Investigation of Smart Diagnosis for Bearings Using Mixed Chaotic Features with Fractional Order. Sensors. 2023; 23(8):3801. https://doi.org/10.3390/s23083801
Chicago/Turabian StyleLi, Shih-Yu, Lap-Mou Tam, Shih-Ping Wu, Wei-Lin Tsai, Chia-Wen Hu, Li-Yang Cheng, Yu-Xuan Xu, and Shyi-Chyi Cheng. 2023. "The Performance Investigation of Smart Diagnosis for Bearings Using Mixed Chaotic Features with Fractional Order" Sensors 23, no. 8: 3801. https://doi.org/10.3390/s23083801