1. Introduction
Medical image segmentation is a crucial technique used in the field of medicine. It involves dividing medical images into distinct regions based on specific similarity features. This segmentation process helps identify and isolate features that hold significant clinical relevance [
1,
2,
3]. By providing a reliable foundation for clinical diagnosis, treatment, and pathological research, it empowers medical professionals to make more accurate and informed diagnoses. However, medical images frequently encounter obstacles, such as low contrast and a low signal-to-noise ratio, as well as organ movement, deformation, and variations among individuals depicted in the images. These challenges substantially amplify the difficulty and complexity associated with medical image segmentation [
4,
5,
6].
Nowadays, medical image segmentation algorithms based on convolutional neural networks (CNNs) have become mainstream [
7,
8,
9,
10]. These algorithms include fully convolutional neural networks (FCNs), U-Net, and U-shaped network structures [
11,
12,
13]. By continuously extracting features and utilizing the encoder–decoder structure, CNN algorithms can effectively recognize and segment important regions in medical images [
14,
15,
16]. However, due to its inherent induction bias constraint, the CNN is unable to complete global modeling and obtain comprehensive global information [
17,
18]. As a result, the segmented areas may have blurred contours, and determining boundary information may be difficult.
Thanks to the remarkable success of transformers in natural language processing, vision transformers are increasingly being utilized as backbone networks in medical image segmentation [
19,
20,
21]. Dosovitskiy A et al. introduced the concept of visual transformers (VITs) [
22]. In the VIT, an image is first divided into several smaller patch blocks, with each block typically measuring 16 × 16 pixels. Subsequently, each patch block is projected into a fixed-length vector and passed through a transformer network. Concurrently, token and location codes are incorporated into the process. Through this sequence of operations, the VIT has demonstrated impressive accuracy and robustness in image classification tasks. Subsequently, the transformer architecture began to find applications in computer vision tasks, with the VIT serving as a significant milestone in this domain. In an effort to mitigate the computational complexity of the VIT and optimize its parameters, Touvron et al. introduced DeiT [
23]. DeiT not only simplifies the training process of the VIT but also enhances the performance of image classification by leveraging knowledge distillation techniques. This advancement in the form of DeiT offers a promising avenue for improving the efficiency and effectiveness of transformer-based image classification models.
With the growing applicability of transformers in medical image segmentation, researchers have increasingly integrated transformers and CNNs to accomplish segmentation tasks [
24,
25]. Prominent examples of such networks include TransUnet [
26] and LeVit-Unet [
27]. TransUnet was the pioneering work that successfully combined these two approaches. In TransUnet, a VIT is employed for the encoder part, while U-Net is used for the decoder part. Additionally, three skip connections are incorporated. This network demonstrates improved accuracy and robustness compared to traditional models. Following the success of TransUnet, a series of transformer-based methods have emerged, including DS-TransUNet [
28], AFTer-UNet [
29], MT-UNet [
30], and FCN-Transformer [
31]. In these networks, the combination of convolutional neural networks (CNNs) and transformers empowers the network to simultaneously extract detailed features and perform global modeling. This effectively addresses the limitations of CNNs in segmenting image edge information. Nevertheless, both TransUent and LeVit-Unet encounter challenges in encoding and interacting with multiscale features. Additionally, due to the inherent encoding characteristics of vision transformers, they are unable to establish strong connections based on the distance between each patch block. These networks uniformly encode all patch blocks, resulting in a reduced encoding efficiency and increased overhead.
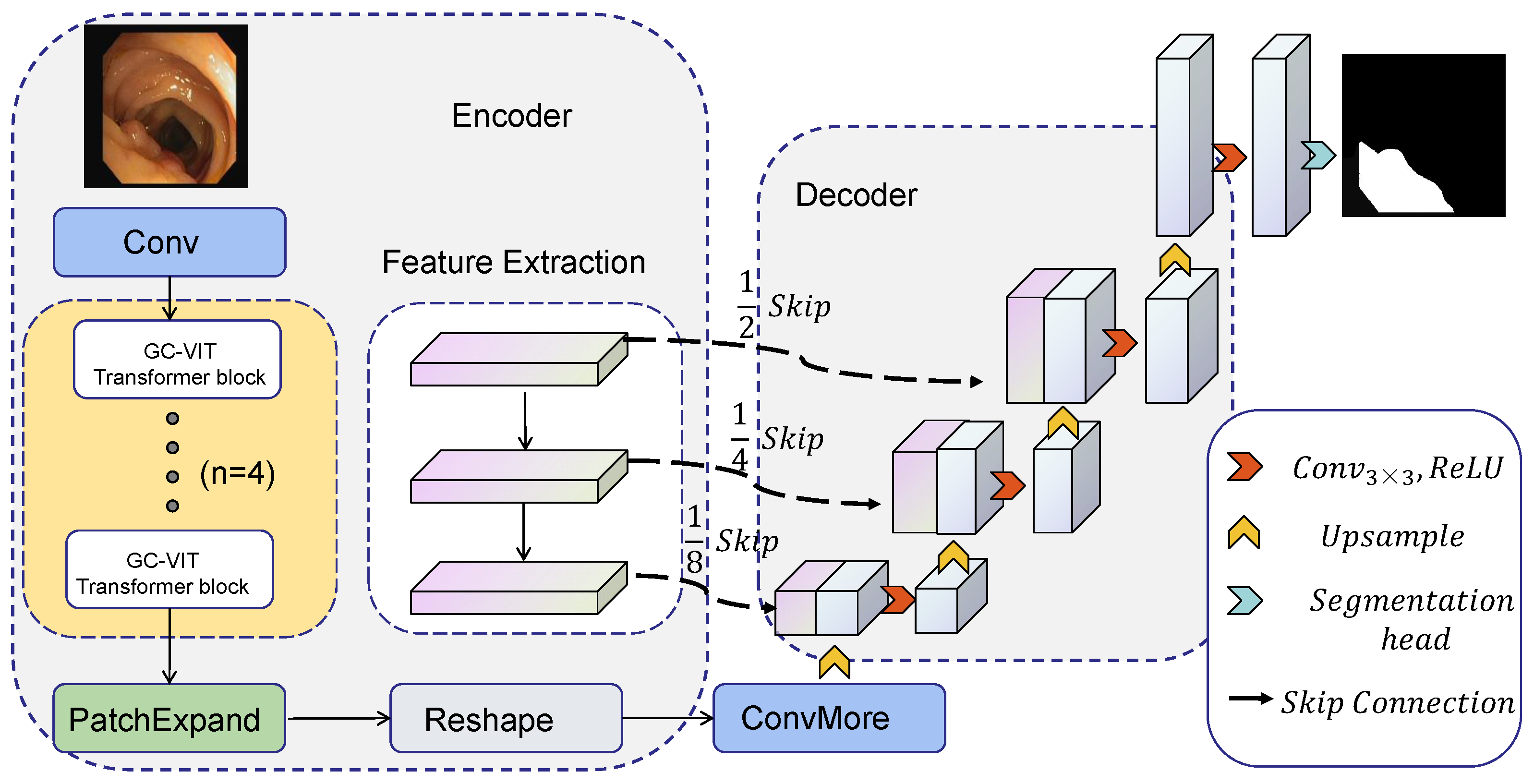
To address the aforementioned challenges, we propose a novel approach for medical image segmentation named GC-TransUnet. Our algorithm combines a CNN and transformer architecture, leveraging an encoder–decoder structure. To ensure efficient transformer encoding, we incorporate local attention, global attention, and global token generator (GTG) modules. These modules enable distinguishing and encoding patch blocks at varying distances during the encoding process.In the first step, the image to be segmented is fed into the local attention module, where each patch block and its neighboring blocks undergo self-attention operations, facilitating local encoding. Next, we utilize the GTG module to extract crucial features from the image, allowing important information from patch blocks situated further away from the central patch block to be aggregated within a feature map. Finally, the global attention module performs operations between each central patch block and the information contained in the feature map. This interaction bridges the gap between the central patch block and those located at longer distances. By employing this encoding scheme, we maximize the extraction of important information across distant patch blocks, consequently eliminating irrelevant information and mitigating the impact of noise. Ultimately, this approach enhances encoding efficiency. Furthermore, we incorporate the patch expand module [
32,
33] to facilitate the necessary adjustments in image size and channels, ensuring compatibility with the decoder. During the decoding stage, we employ the U-Net architecture to carry out the decoding process. Additionally, we perform four rounds of encoding to obtain four feature maps of different sizes, thus capturing multiscale information. The contributions of this paper can be summarized as follows:
(1) The proposed algorithm incorporates the GTG module, effectively filtering long-distance information. Additionally, we utilize a pyramid structure to progressively downscale the feature map, capturing long-distance information at different scales.
(2) To ensure efficient encoding, we employ both local attention and global attention mechanisms. These mechanisms enable the interactive encoding of long-range information at varying scales, thus enhancing coding efficiency.
(3) By combining a transformer with U-Net, our model integrates both detailed information and long-range information, allowing for a comprehensive representation of the input data.
The rest of this paper is organized as follows: In
Section 2, we describe the motivation of the proposed algorithm.
Section 3 details our proposed algorithm.
Section 4 depicts segmentation results and analysis on different medical images. Conclusions and future work are presented and discussed in
Section 5.
2. Motivation
The correlations between each pixel block in an image can vary significantly. For instance, adjacent pixel blocks may share similar features, while those that are far apart usually have fewer connections. Traditional transformers tend to overlook the correlation between pixel blocks or introduce additional operations like interactive windows, which can lead to unnecessary computational resource wastage.
In
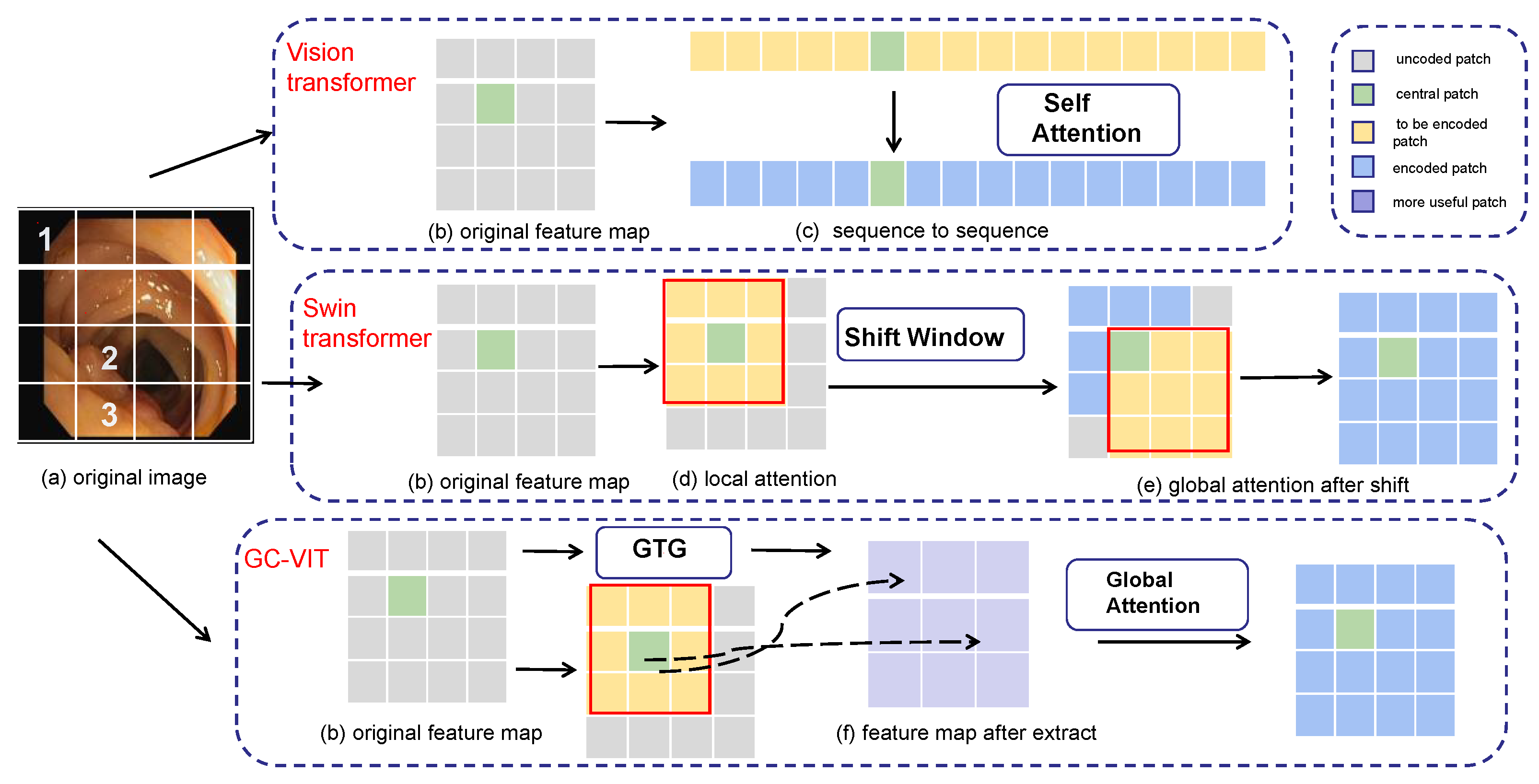
Figure 1, an example is presented to illustrate different encoding methods for various transformers. In
Figure 1a, an original colon polyp image is divided into 4 × 4 pixel blocks. Pixel block 1 represents information about the outer side of the colon and has a relatively far distance from pixel block 2, resulting in significant differences in the represented information. Pixel block 2, being adjacent to pixel block 3, provides more information about polyps and exhibits a strong correlation. When taken as the center, pixel block 2 shows a stronger correlation with closer blocks and a weaker correlation with blocks farther away. On the right side of
Figure 1, three different encoding methods for transformers are displayed, including the vision transformer, Swin transformer [
34,
35], and GC-VIT [
36]. In these representations, different colors are used to denote different stages of the encoding process. Gray represents the uncoded patch, green represents the central patch, yellow represents the current patch that needs encoding and interacts with the central patch, blue represents the encoded patch, and purple represents the more important patches extracted by GTG (global token generation).
The vision transformer directly utilizes the self-attention mechanism to uniformly encode each patch block, ignoring the relationships between pixel blocks. The U-Net based on Swin the transformer uses the shift window to encode the central pixel block with additional neighboring pixel blocks. However, this approach can lead to resource wastage due to window sliding and the computation of masks. To address these weaknesses, the proposed GC-VIT employs GTG (global token generation) to calculate the correlations between each pixel block. This process allows for the extraction of useful pixel blocks while effectively removing irrelevant and redundant information. Instead of incorporating all information, the approach selectively includes only the useful information in the computation of global self-attention. This method does not require any additional operations, resulting in resource savings.
We compare the Swin transformer with the GC-VIT and discuss their performance. In the paper “Global Context Vision Transformers”, the authors conducted experiments on the ADE20K dataset to compare the GC-VIT with several mainstream models, including the Swin transformer. In the experiments, Swin-T has a higher number of parameters (Param (M)) compared to the GC VIT-T, while their computational complexity (FLOPs (G)) is approximately the same. Swin-B has a higher number of parameters (Param (M)) than GC VIT-T, but its computational complexity (FLOPs (G)) is significantly lower than GC VIT-B.
Based on these experimental results, it can be observed that the GC-VIT outperforms the Swin transformer significantly, indicating that the GC-VIT is more efficient than the sliding window mechanism used in the Swin transformer in terms of computational cost. The GC-VIT avoids the computational overhead associated with masking and window shifting, which is required by the sliding window approach. The sliding window mechanism often involves extensive masking and window shifting operations, especially when dealing with high-resolution images, leading to a notable increase in computation and inference time.
4. Experimental Results and Analysis
4.1. Dataset
- (1)
ISIC 2018 dataset:
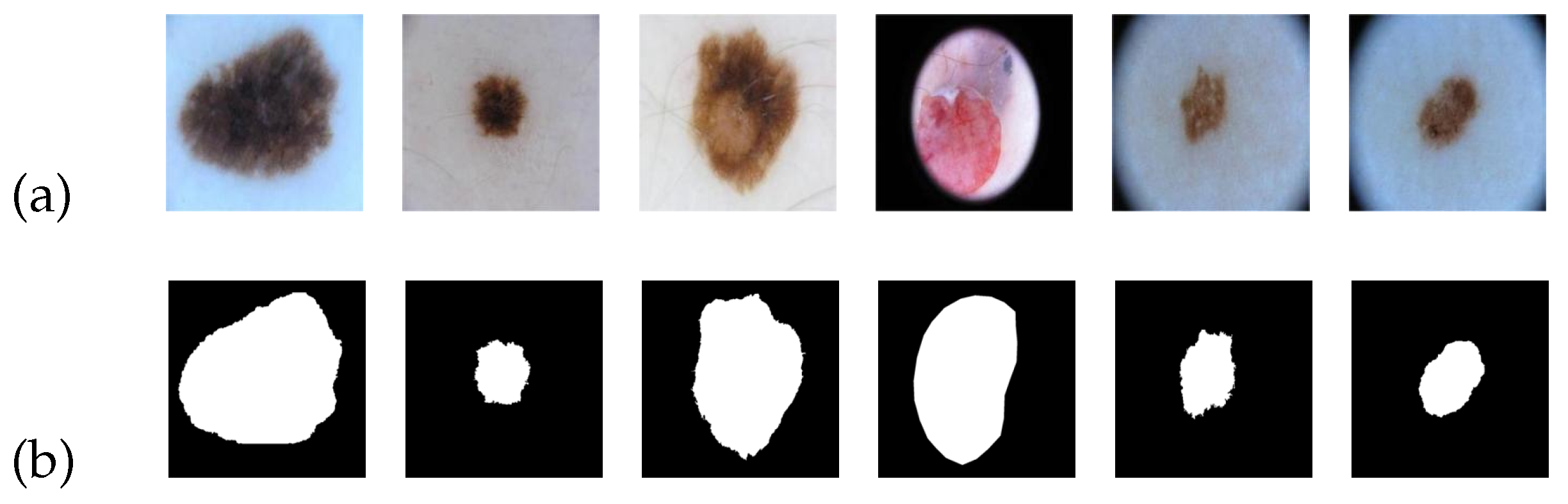
The ISIC 2018 dataset comprises images of skin cancer lesions, which are provided in PNG format. This dataset consists of 2596 images along with their corresponding standard segmentation results.
Figure 5 serves as an illustrative example of the ISIC 2018 image dataset. In
Figure 5a, a collection of skin cancer lesion images is presented, while
Figure 5b showcases the corresponding standard segmentation results depicting the segmented lesion area.
For our experiment, we divided the dataset into three subsets: a training set, a validation set, and a test set. These subsets accounted for 60%, 20%, and 20% of the total, respectively. Additionally, we resized the images to a dimension of 224 × 224. Multiple rounds of training were conducted, and we selected the best-performing model to generate the final segmentation result.
- (2)
CVC-ClinicDB dataset:
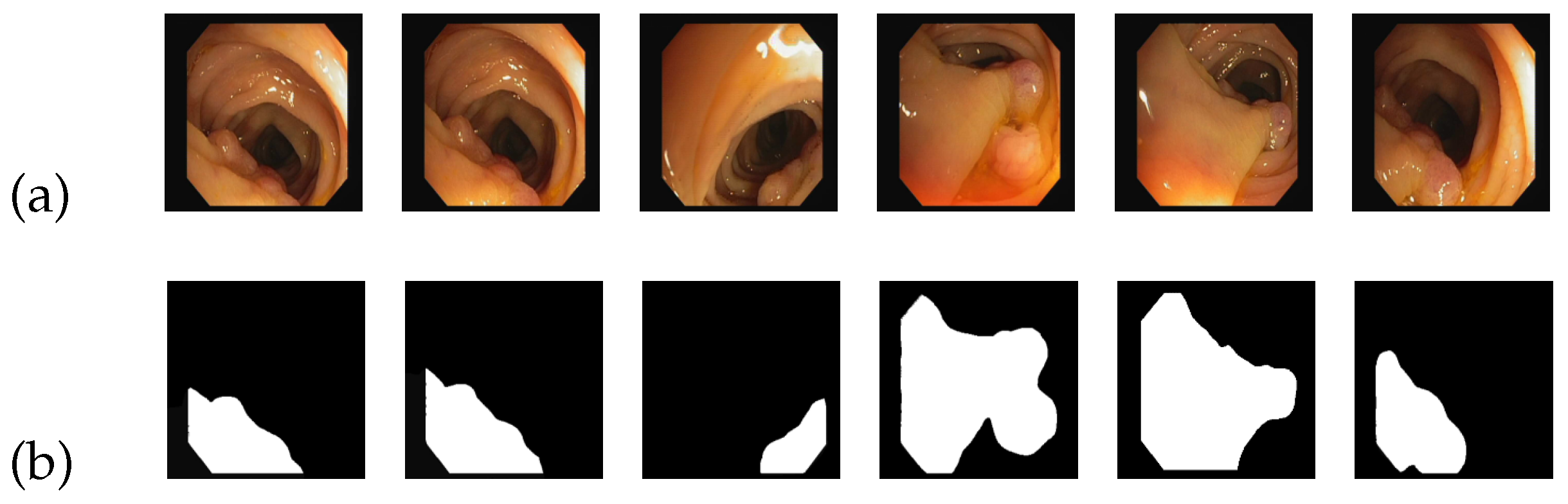
The CVC-ClinicDB dataset comprises images in PNG format specifically focused on colon polyps. This dataset consists of 612 images, each with a size of 384 × 288, all derived from colonoscopy sequences.
Figure 6 serves as an illustrative example of the CVC-ClinicDB image dataset. In
Figure 6a, a group of source images depicting colon polyps is displayed, while
Figure 6b showcases the corresponding standard segmentation results representing the segmented lesion area.
Considering the specific characteristics of the images, we further divided them into a size of 384 × 384 pixels. Additionally, we partitioned the dataset into three subsets: a training set, a test set, and a validation set, with proportions of 70%, 20%, and 10%, respectively. Multiple rounds of training were performed, repeatedly iterating the training process to achieve the optimal results.
- (3)
Kvasir-SEG dataset
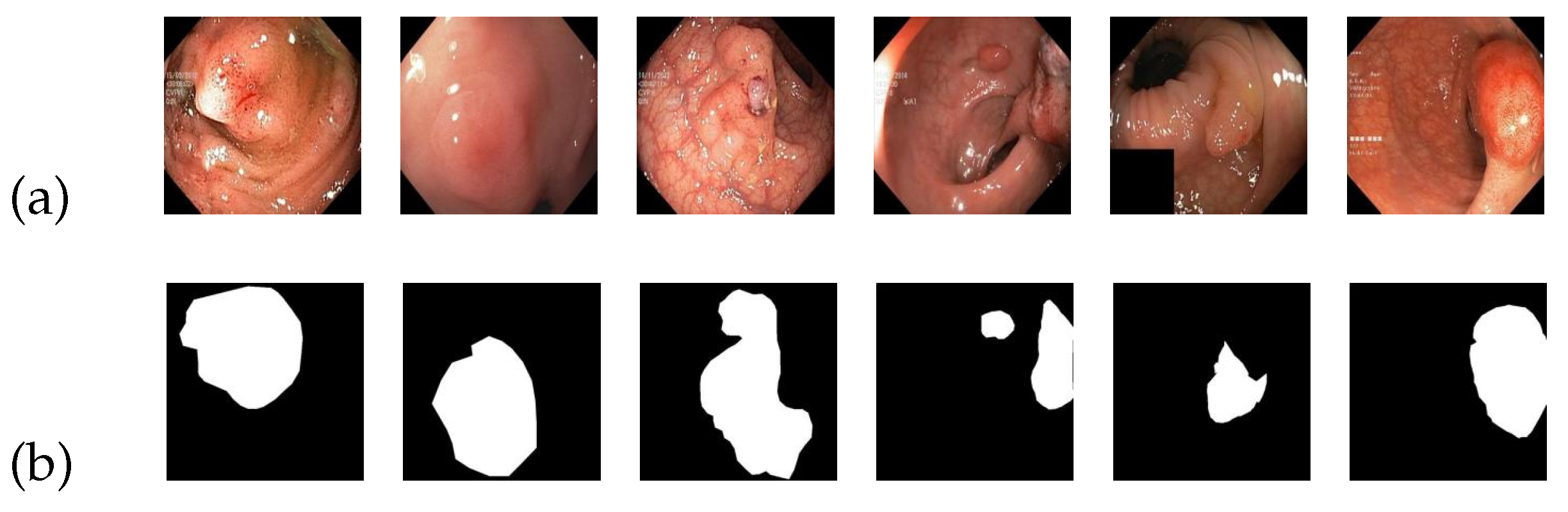
The Kvasir-SEG dataset consists of 1000 images of colon polyps in JPEG format, accompanied by their respective labels. The image sizes in the dataset vary from 332 × 487 pixels to 1920 × 1072 pixels.
Figure 7 serves as an illustrative example of the Kvasir-SEG image dataset. In
Figure 7a, a collection of source images depicting colon polyps is displayed, while
Figure 7b showcases the corresponding standard segmentation results representing the segmented lesion area.
To facilitate training, the images are set to a standardized size of 384 × 384 pixels. The dataset is divided into a training set, a test set, and a validation set, containing 700, 100, and 200 images, respectively. Multiple training iterations are performed, and the model with the highest score is selected to demonstrate the final results.
4.2. Experimental Details
The GC-TransUnet model is implemented using Python 3.7 and PyTorch 1.11.0. On the GPU side, we utilize the NVIDIA GeForce RTX 3060 Laptop GPU with 6 GB of memory. Throughout the training process, we maintain a uniform patch block size of 4. The optimizer employed is RMSprop, and the loss function utilized is dice loss.
Regarding the ISIC 2018 dataset, the learning rate is set to 0.001, and the batch size is set to 6. We train the gc-vit-tiny model and repeat the training process to obtain the best value. In our experiment, we utilize various evaluation metrics to assess the experimental results, including the midce, accuracy, recall, miou, fwavacc, and F1 score. We also conduct a comparative analysis between the U-Net series network and TransUnet using the ISIC 2018 dataset. Furthermore, in the colon polyp dataset, we compare the experimental results with classic networks, such as U-Net, resulting in favorable outcomes.
4.3. Experimental Results on ISIC 2018 Dataset
The experimental results of different algorithms on the ISIC 2018 dataset are presented in
Table 2, with the best outcomes highlighted in bold. As shown in
Table 2, GC-TransUnet and TransUnet outperform other algorithms significantly in terms of recall, miou, and F1 score. In comparison to the TransUnet model, our proposed GC-TransUnet exhibits a noticeable improvement of 1.4% and 2.3% in midce and recall, respectively, while also showing enhancements in other metrics. Hence, the GC-Transformer model demonstrates superiority over other comparative models in the identification and segmentation of skin cancer lesions, particularly for larger lesions.
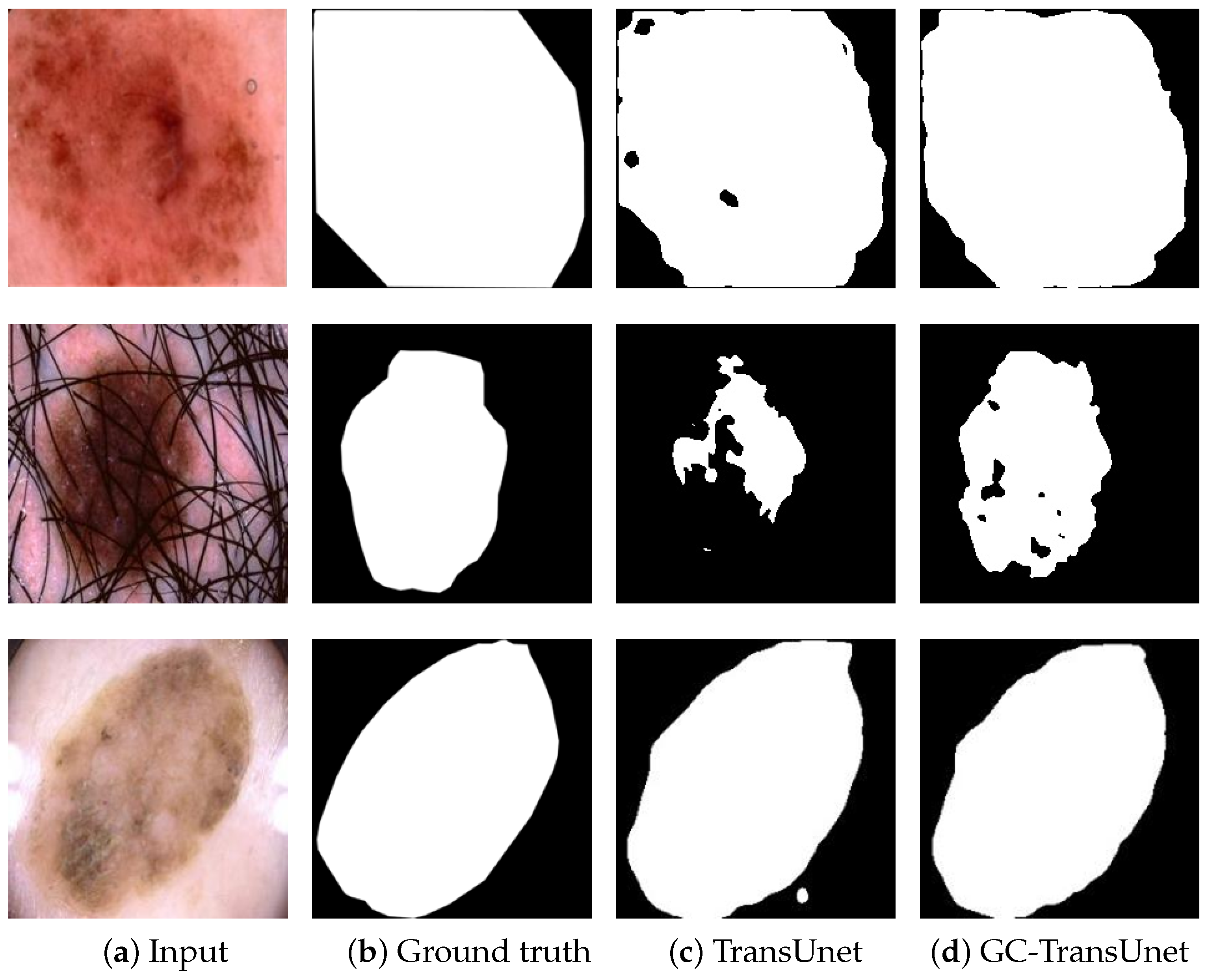
In order to compare the segmentation results of TransUnet and GC-TransUnet more clearly, an example of segmentation results of both algorithms on the ISIC 2018 dataset are depicted in
Figure 8. In
Figure 8,
Figure 8a portrays the input images, while
Figure 8b represents the corresponding ground truth of the lesion areas.
Figure 8c and
Figure 8d display the segmentation results achieved by TransUnet and GC-TransUnet, respectively.
Figure 8 clearly demonstrates that, compared to TransUnet, GC-TransUnet produces more comprehensive segmentation of the lesion area, exhibiting sharper boundaries and closely resembling the ground truth at numerous prediction points. These improvements are likely attributed to the encoding of both long-range and short-range information. The results indicate the proposed model’s capability to deliver impressive outcomes in medical image segmentation.
4.4. Experimental Results on CVC-ClinicDB Dataset
The experimental results of different algorithms on the CVC-ClinicDB dataset are presented in
Table 3, with the optimal outcomes highlighted in bold. As observed in
Table 3, GC-TransUnet surpasses other models in terms of midce, accuracy, miou, and F1 score metrics. In the case of the recall index, the Attention R2U-Net model achieves the best results, with GC-TransUnet trailing by approximately 4.5%. However, GC-TransUnet outperforms Attention R2U-Net in other metrics. Notably, GC-TransUnet exhibits more than a 13% improvement in accuracy compared to Attention R2U-Net. This further emphasizes the advantage of our model in accuracy.
The segmentation results of different algorithms on the CVC-ClinicDB dataset are depicted in
Figure 9.
Figure 9a illustrates the input images,
Figure 9b represents the corresponding ground truth of colon polyps, and
Figure 9c–f depict the segmentation results obtained by U-Net, U-Net++, Attention R2U-Net, and GC-TransUnet, respectively. It is evident from
Figure 9 that GC-TransUnet demonstrates a superior performance. In the case of small region segmentation (such as the input image in the first row), our model yields the most accurate predictions, while for larger region segmentation, it excels at capturing contours and protrusions within the images. Furthermore, in the second and third sets of images, our model exhibits better identification of interference caused by other pixels, thereby ensuring prediction accuracy.
4.5. Experimental Results on Kvasir-SEG Dataset
The experimental results of different algorithms on the Kvasir-SEG dataset are displayed in
Table 4, with the best outcomes highlighted in bold. As observed in
Table 4, our model outperforms other classical models across various metrics. The average midce, precision, recall, miou, and F1 score are higher by 3.49%, 4.82%, 4.96%, 4%, and 4.97%, respectively, compared to the suboptimal model (U-Net++). The experimental results demonstrate that our model achieves favorable segmentation results in colon polyp segmentation.
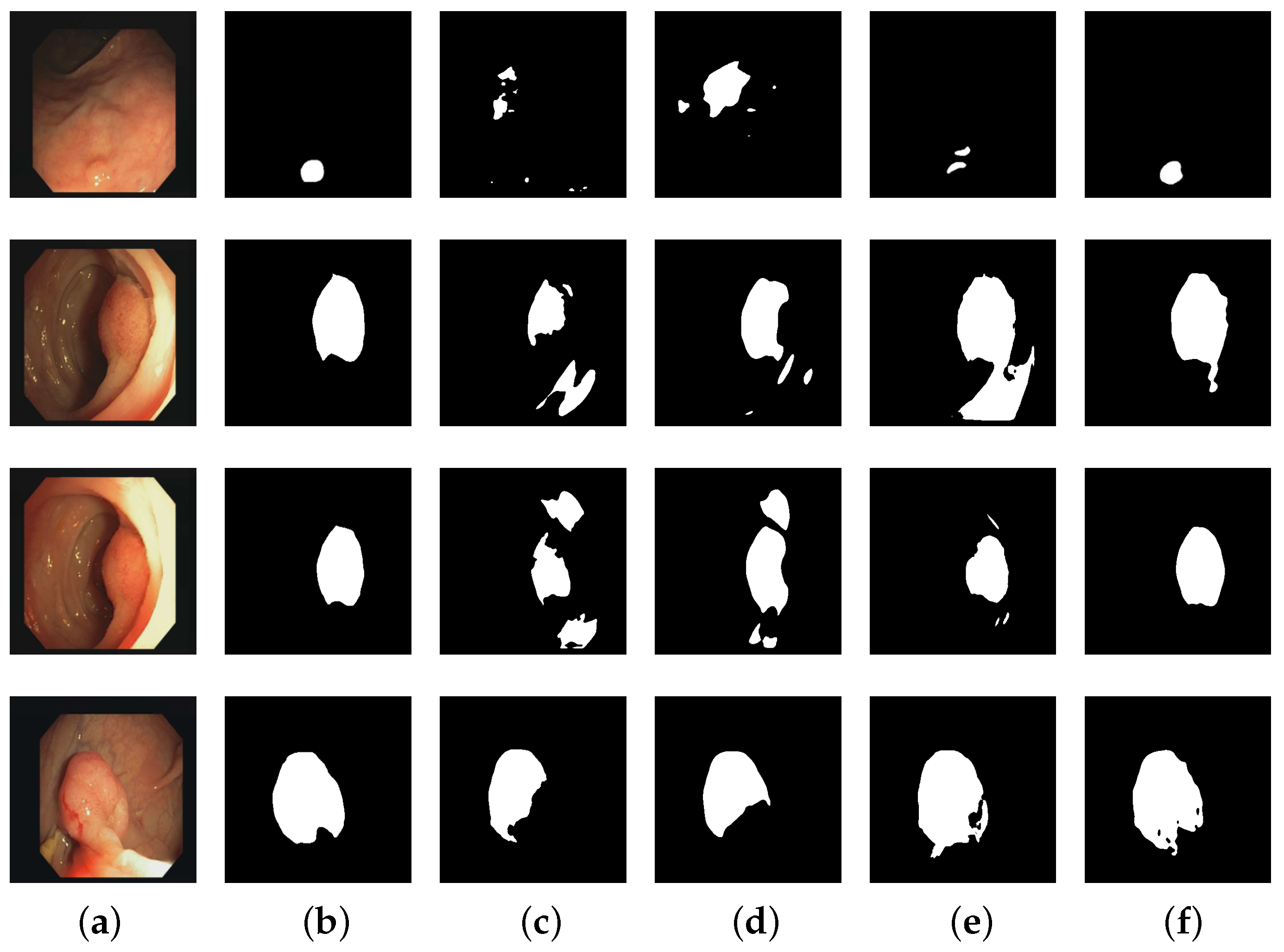
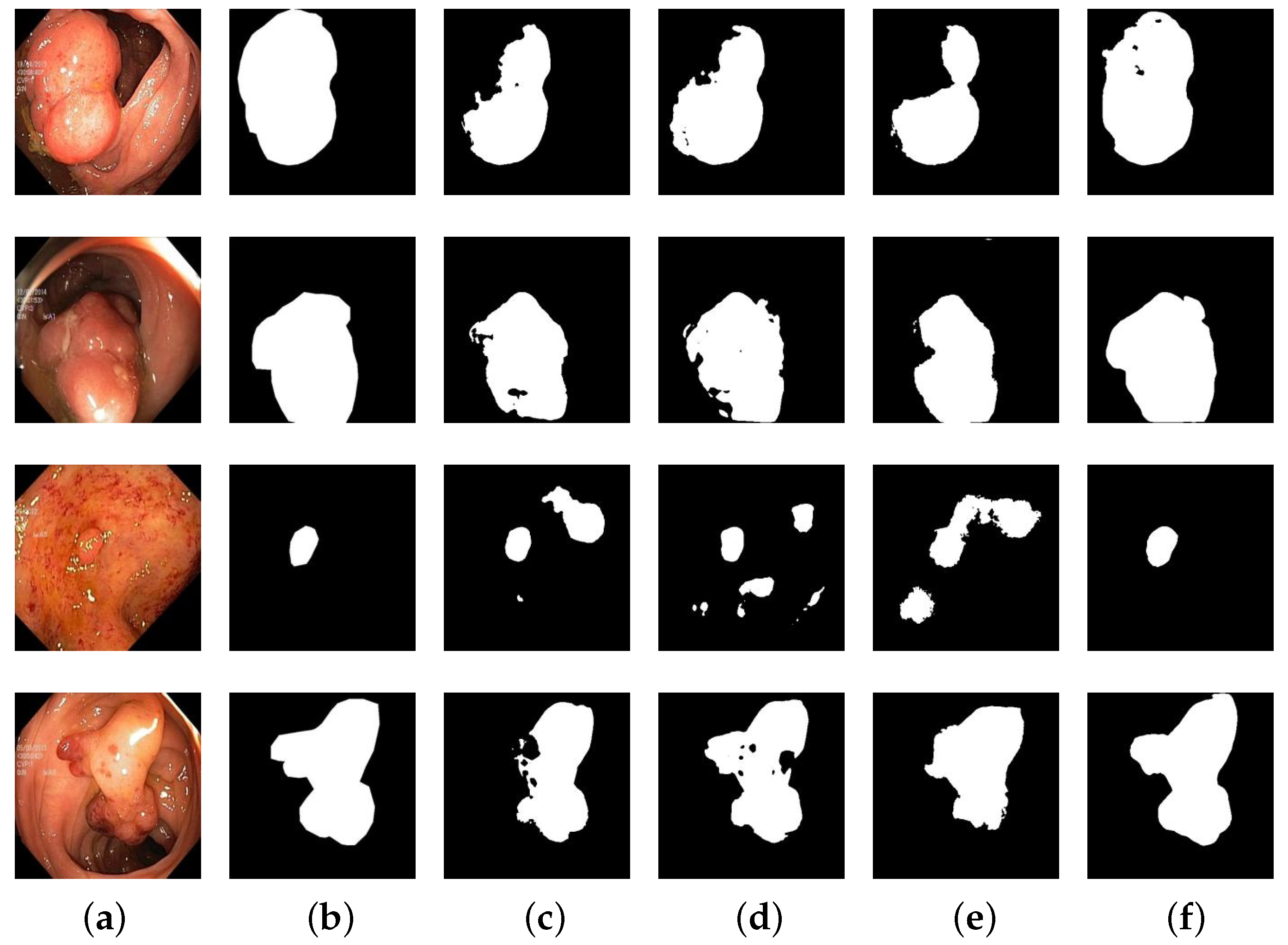
The segmentation results of different algorithms on the Kvasir-SEG dataset are depicted in
Figure 10. In
Figure 10,
Figure 10a represents the input images,
Figure 10b portrays the corresponding ground truth of colon polyps, and
Figure 10c–f depict the segmentation results obtained by U-Net, U-Net++, ResUNet++, and GC-TransUnet, respectively. It is evident from
Figure 10 that in the first set of segmentation results GC-TransUnet provides more comprehensive and accurate predictions. Moreover, in the case of small region segmentation (such as the input image in the third row), GC-TransUnet accurately predicts the shape and position of the image. In the second and fourth sets of segmentation results, GC-TransUnet demonstrates precise prediction of the segmentation area’s outline, closely resembling the ground truth in many details. Therefore, our model exhibits a superior performance in colon polyp image segmentation applications.
4.6. Processing Time and Computational Cost
In this section, we conducted a comparative study of different models and our proposed algorithm in terms of processing time. We used “Params (M)” to measure the number of model parameters and “FLOPs (G)” to estimate the computational complexity. We used the FPS (Frames Per Second) metric to measure the performance of each model on the same dataset. Throughout the experiments, all images were resized to a size of 224 × 224. The experimental results are presented in
Table 5 below:
According to
Table 5, our algorithm demonstrates a relatively low processing time, indicating high efficiency in handling images. Our algorithm outperforms Unet++ and R2AttUnet in image processing capability and slightly surpasses ResUnet++ and Att-unet, while being comparable to Unet. Although DeepLabV3+ exhibits a faster processing time, the image quality of its segmentation results is inferior to our algorithm. On the ISIC 2018 dataset, our algorithm performs more than 2% better in all evaluation metrics compared to DeepLabV3+. In the polyp dataset, our algorithm also outperforms DeepLabV3+.
We believe that achieving higher image quality is desirable even if it comes at the cost of increased processing time. By balancing both time and image quality considerations, our algorithm exhibits outstanding performance in medical image segmentation tasks. Its efficient processing speed and excellent segmentation results make it highly promising for practical applications.
And our model has a relatively small number of parameters, which is comparable to U-Net. However, in terms of computational complexity, our model requires fewer FLOPs compared to mainstream models. This indicates that our model’s inference speed will be faster. Additionally, due to its faster inference speed and appropriate parameter size, our model provides valuable assistance for future algorithm improvements.
4.7. Ablation Study
To investigate the impact of various factors, we conducted ablation experiments on the ISIC 2018 dataset. Specifically, we examined the effect of the distance between each patch block on encoding quality and the patch expand module in our model.
In order to investigate the influence of the distance between each patch block on encoding quality, we conducted three sets of experiments: (1) The first set of experiments involved removing global attention and replacing it with local attention, aiming to explore the significance of distant patch blocks in the encoding process. (2) The second set of experiments focused on removing the feature extraction mechanism of the GTG module while retaining other components, with the aim of exploring the necessity of feature extraction and filtering out redundant information. (3) The third set of experiments aims to investigate the impact of our proposed patch expand module compared to the traditional bilinear interpolation on image segmentation results.
- (1)
Effect of local attention
In order to explore the role of local attention in the entire algorithm, we conducted an ablation study on the ISIC 2018 dataset by removing local attention from the encoder. The experimental results are shown in
Table 6. From
Table 6, it can be observed that after disabling local attention the model’s performance decreased by 0.43% in midce, 0.61% in miou, and 0.53% in F1 score. The largest decrease was observed in accuracy, reaching 1.32%. However, the recall remained unchanged compared to the original algorithm. We believe that local attention effectively performs local encoding, leading to improved accuracy at local edge positions.
- (2)
Effect of global attention
By removing global attention, we intentionally eliminated the interaction between global attention and GTG modules, effectively preventing the network from encoding remote patch blocks. The impact of this modification on the encoding quality is demonstrated in
Table 7. Without the presence of global attention, the transformer only encodes adjacent patch blocks, neglecting crucial information from patch blocks located further away. Consequently, this limited encoding strategy leads to suboptimal performance.
- (3)
Effect of GTG
In this experiment, we excluded the feature extraction mechanism from the GTG module while retaining certain pooling functionality. Without feature extraction, global attention encoded each patch block of the entire image uniformly. The experimental results are presented in
Table 8. Due to the significant distance between two patch blocks, the valuable information shared between them was limited, resulting in some information becoming irrelevant or even noise. To improve encoding quality, it is crucial to filter patch blocks over longer distances, extract essential information, and mitigate the impact of noise. Hence, we incorporate a feature extraction mechanism to achieve these objectives.
- (4)
Effect of downsample
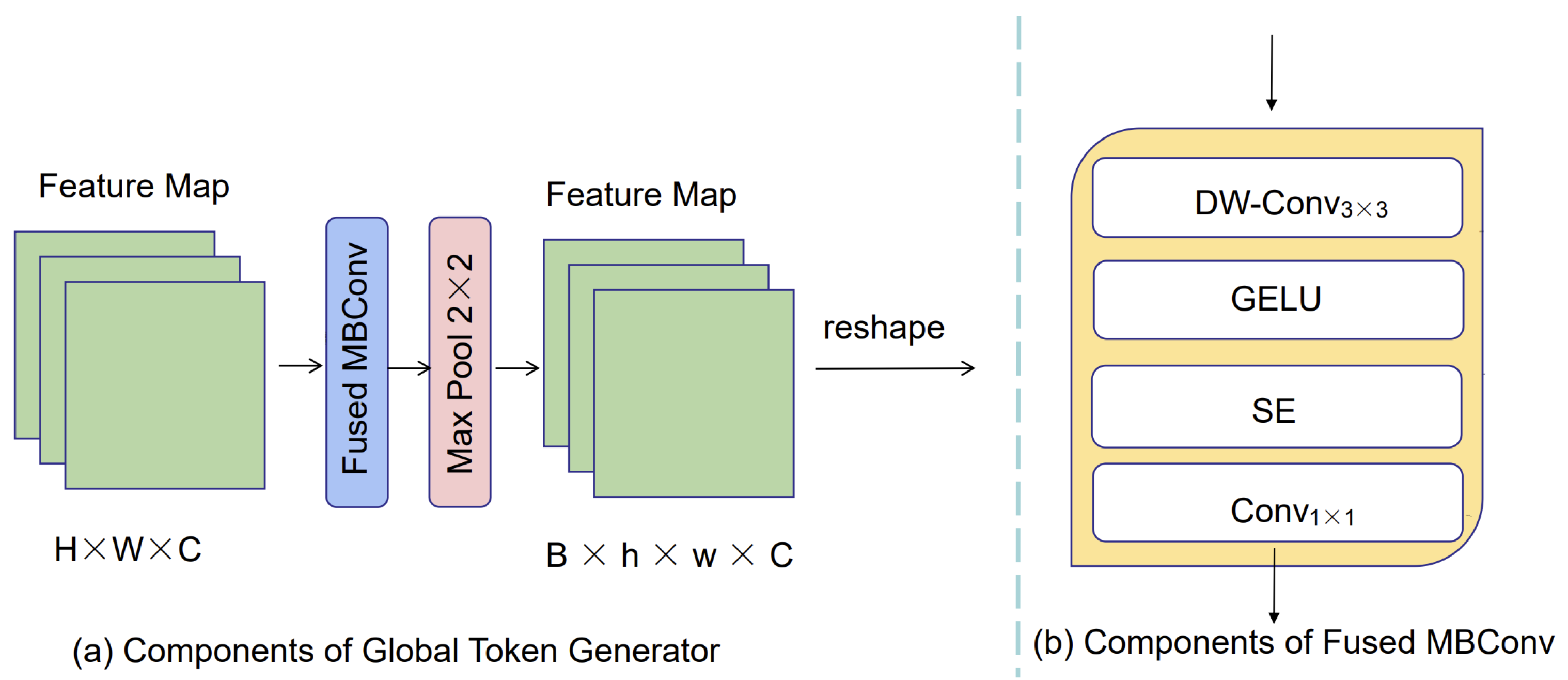
The most crucial part of the downsample module is the Fused-MBConv module. To understand the role of the downsample module in the algorithm, we removed the Fused-MBConv module from it and conducted experiments to analyze the impact. The experimental results are presented in
Table 9. After removing the Fused-MBConv module, the overall performance of the algorithm declined. Specifically, there was a decrease of 0.65% in miou, 0.37% in accuracy, 0.78% in recall, 0.63% in F1 score, and 0.56% in midce. These results suggest that the absence of the Fused-MBConv module in the downsample module hindered the proper organization and improvement of feature maps, leading to a decline in the overall algorithm performance.
- (5)
Effect of patch expand module
In the proposed GC-TransUnet, we utilize the patch expand module to facilitate the necessary adjustments in image size and channels, ensuring compatibility with the decoder. In this experiment, we investigate the impact of patch expand module compared to the traditional bilinear-interpolation-based upsampling on image segmentation results. The experimental results in
Table 10 demonstrate the superiority of our proposed patch expand module in achieving improved segmentation outcomes within GC-TransUnet.
5. Conclusions
In this paper, we introduce GC-TransUnet, an approach based on an innovative global context vision transformer for medical image segmentation. The encoder incorporates a pyramid structure inspired by the GC-VIT to enhance operational efficiency. In the decoder part, we utilize upsampling layers and convolutional layers from U-Net. To address the interaction issue, we employ both local self-attention and global self-attention mechanisms. Additionally, we use the patch expand module to effectively adjust image size information and channels.
We evaluate the performance of GC-TransUnet on three medical image datasets: ISIC 2018, CVC-ClinicDB, and Kvasir-SEG. Experimental results demonstrate the effectiveness of GC-TransUnet, as it achieves highly satisfactory segmentation outcomes. When compared to other methods, our proposed algorithm exhibits superior performance, both subjectively and objectively. For future work, we intend to explore the incorporation of the transformer into the decoder to further enhance the results.

 ,
, 










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}