
Automatic Modulation Classification for Underwater Acoustic Communication Signals Based on Deep Complex Networks


Abstract
:1. Introduction
- We adopted DCN to AMC of underwater acoustic communication signals to adequately learn features from the raw complex baseband signals.
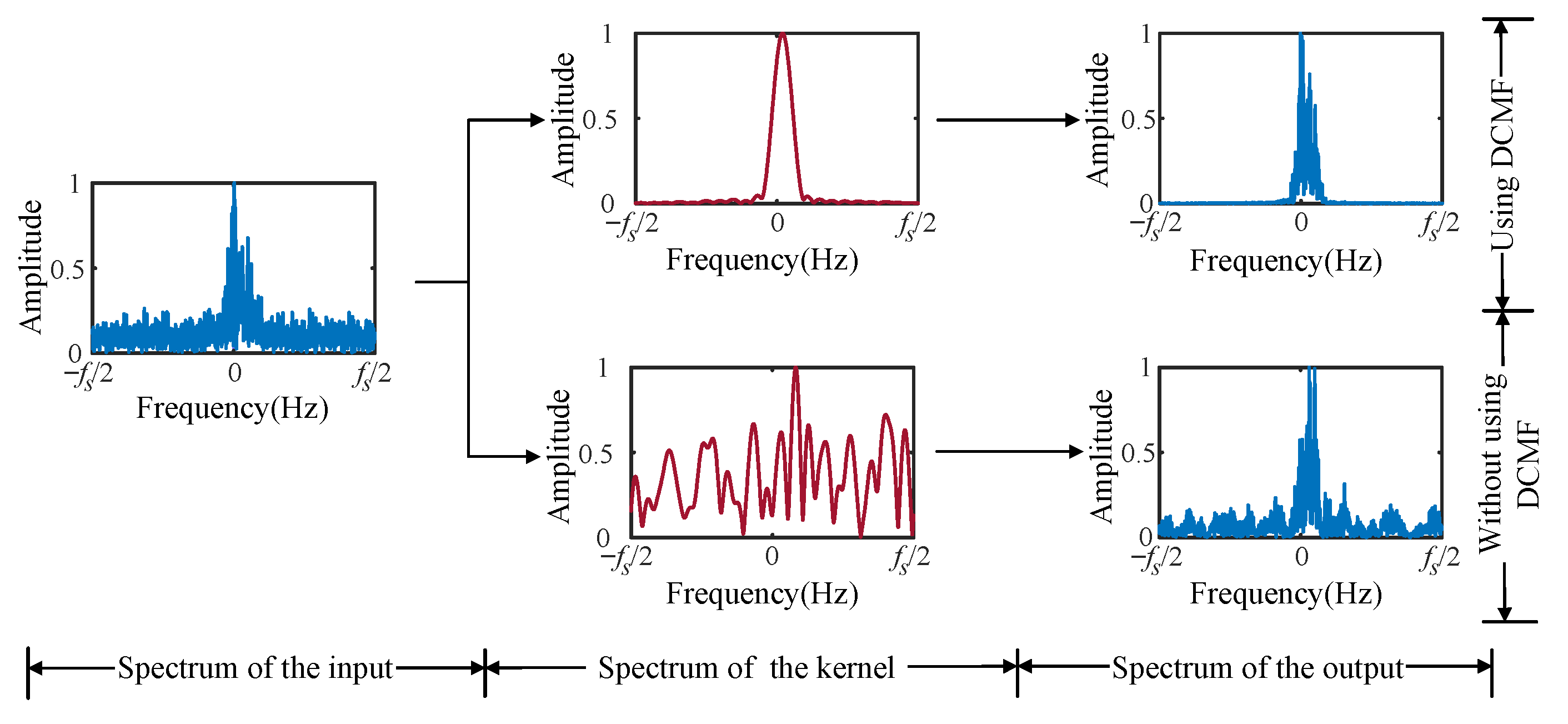
- Two physical signal processing layers were constructed based on DCN to improve the AMC performance, including a deep complex matched filter (DCMF) and deep complex channel equalizer (DCCE). The DCMF can help to remove noise from the signals, and the DCCE can reduce the influence of multi-path fading effectively. DCMF and DCCE were embedded in DCN to improve the AMC performance.
- The influence of underwater acoustic channels on the signals was fully considered, and different underwater acoustic channels were simulated by using the real-world ocean observation dataset and ambient noise. The effectiveness of the proposed method was verified in different underwater acoustic channels and real-world dataset.
2. Materials and Methods
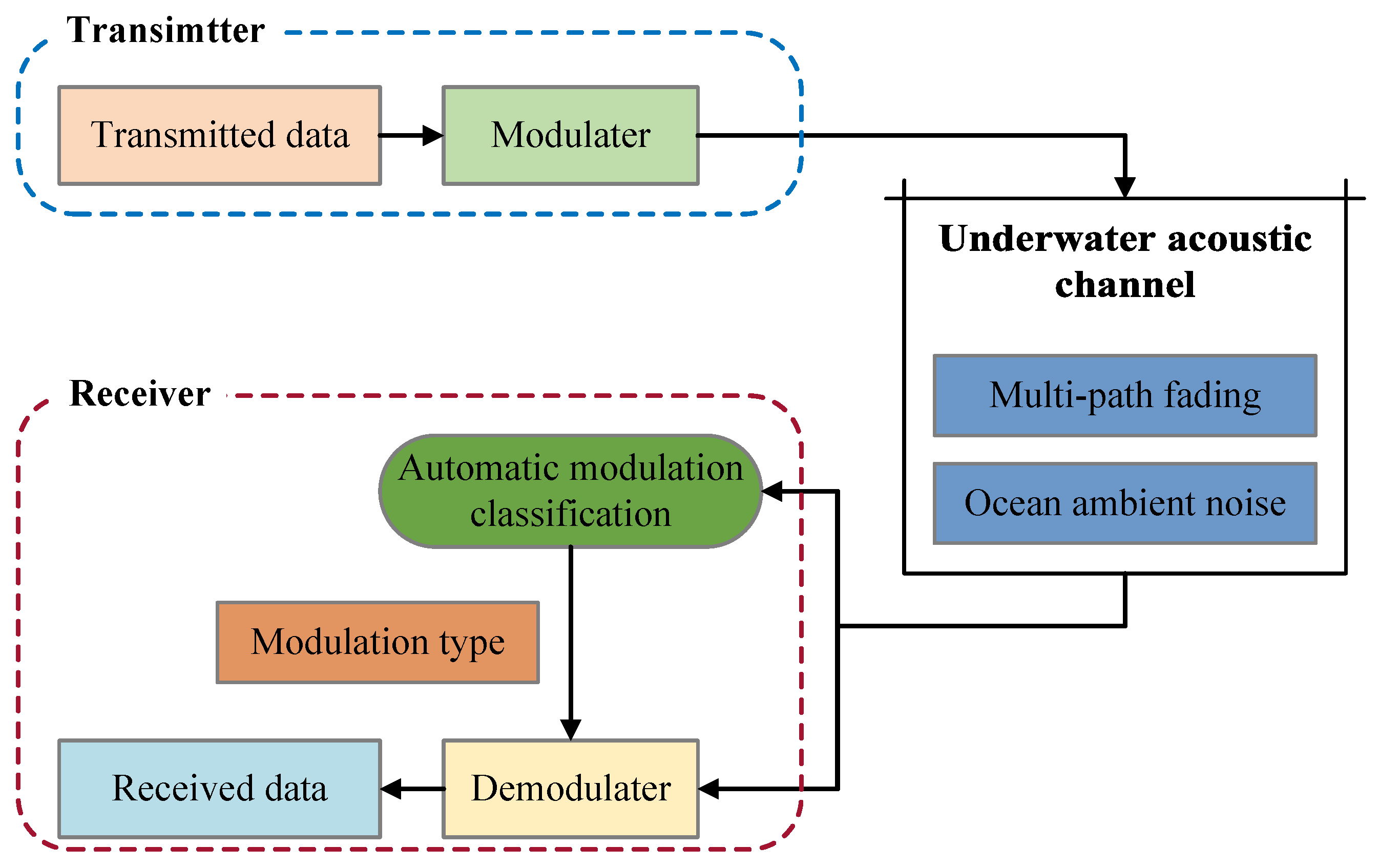
2.1. Underwater Acoustic Communication Signals and Channel
2.1.1. Signal Model
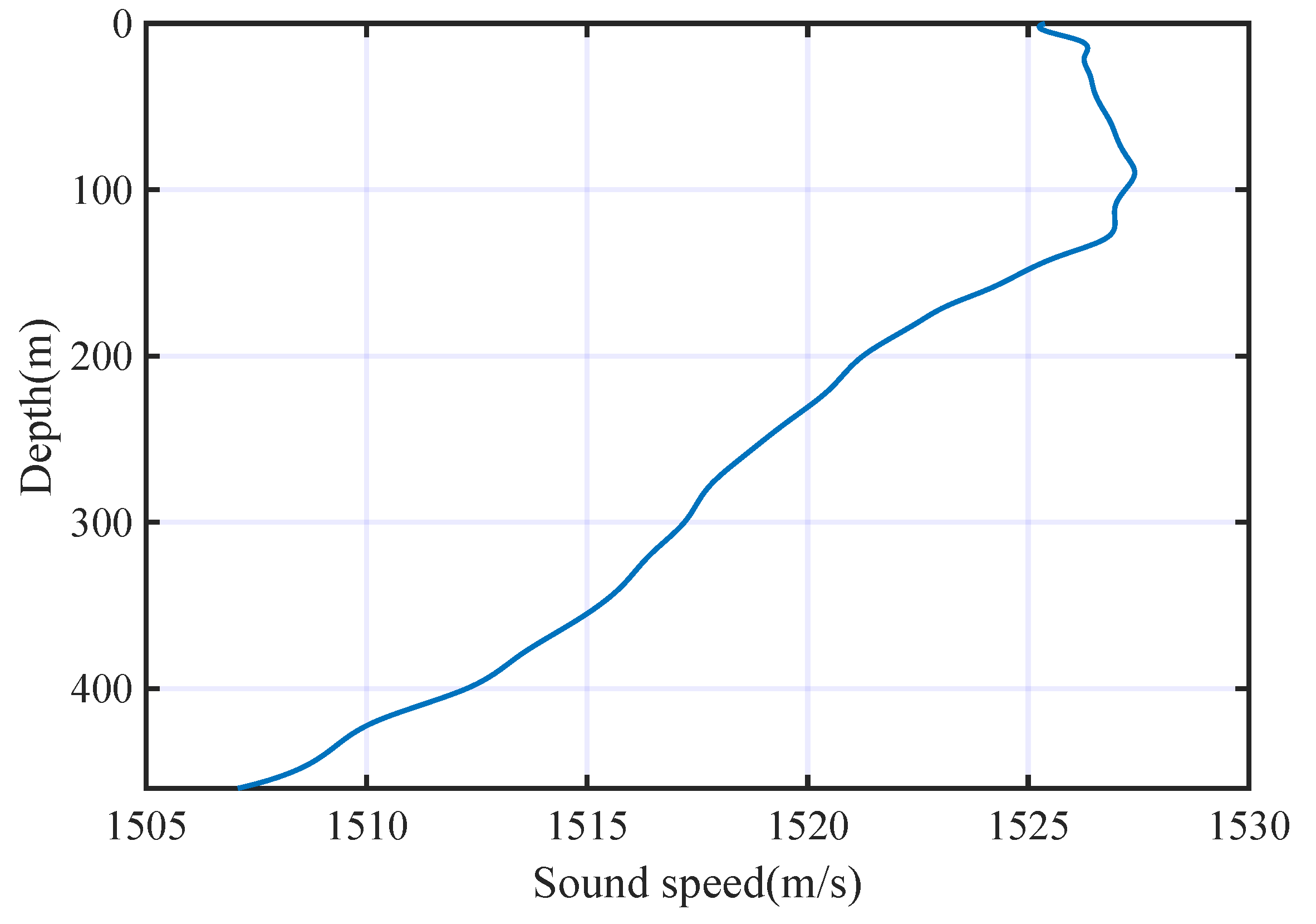
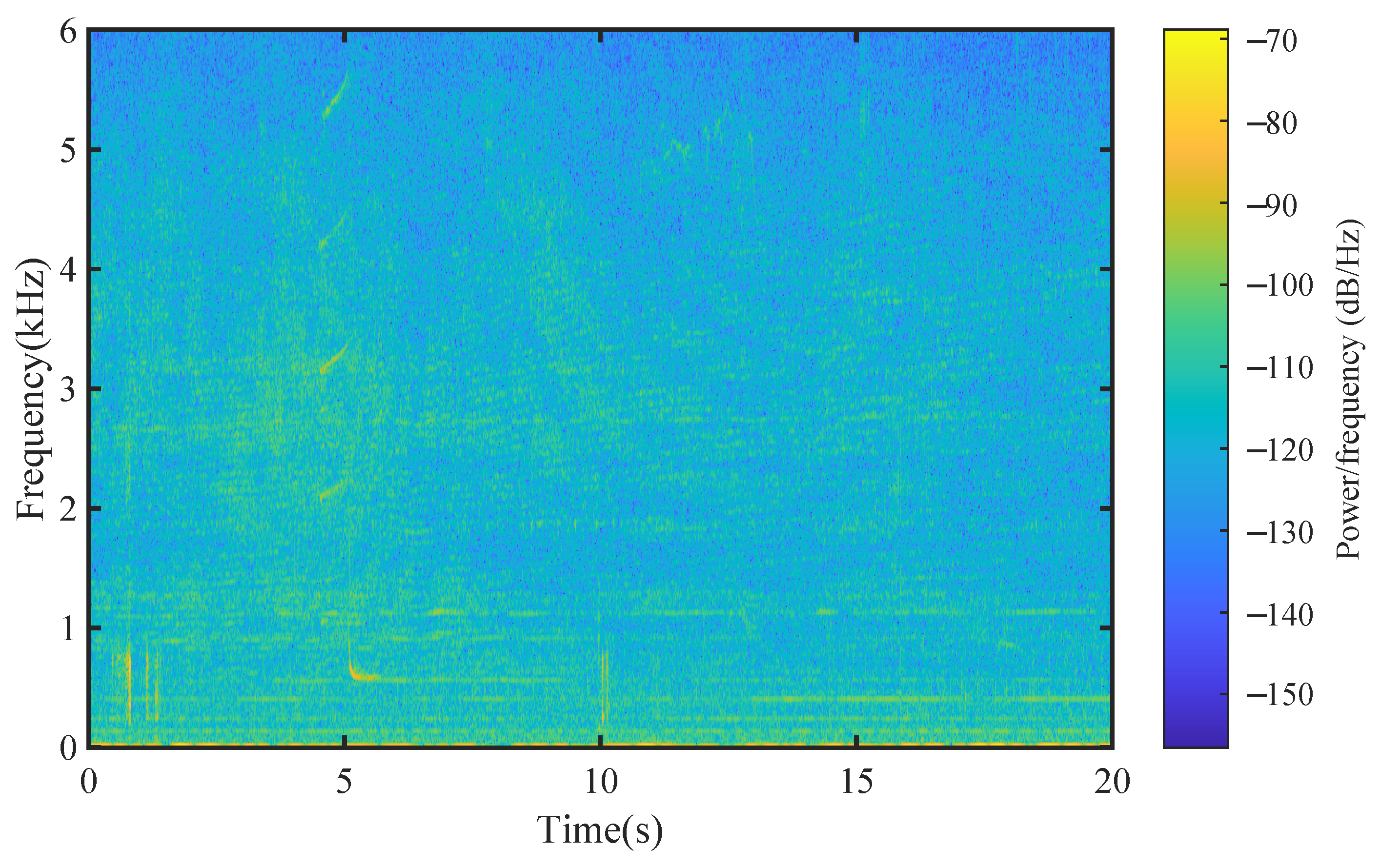
2.1.2. Underwater Acoustic Channel
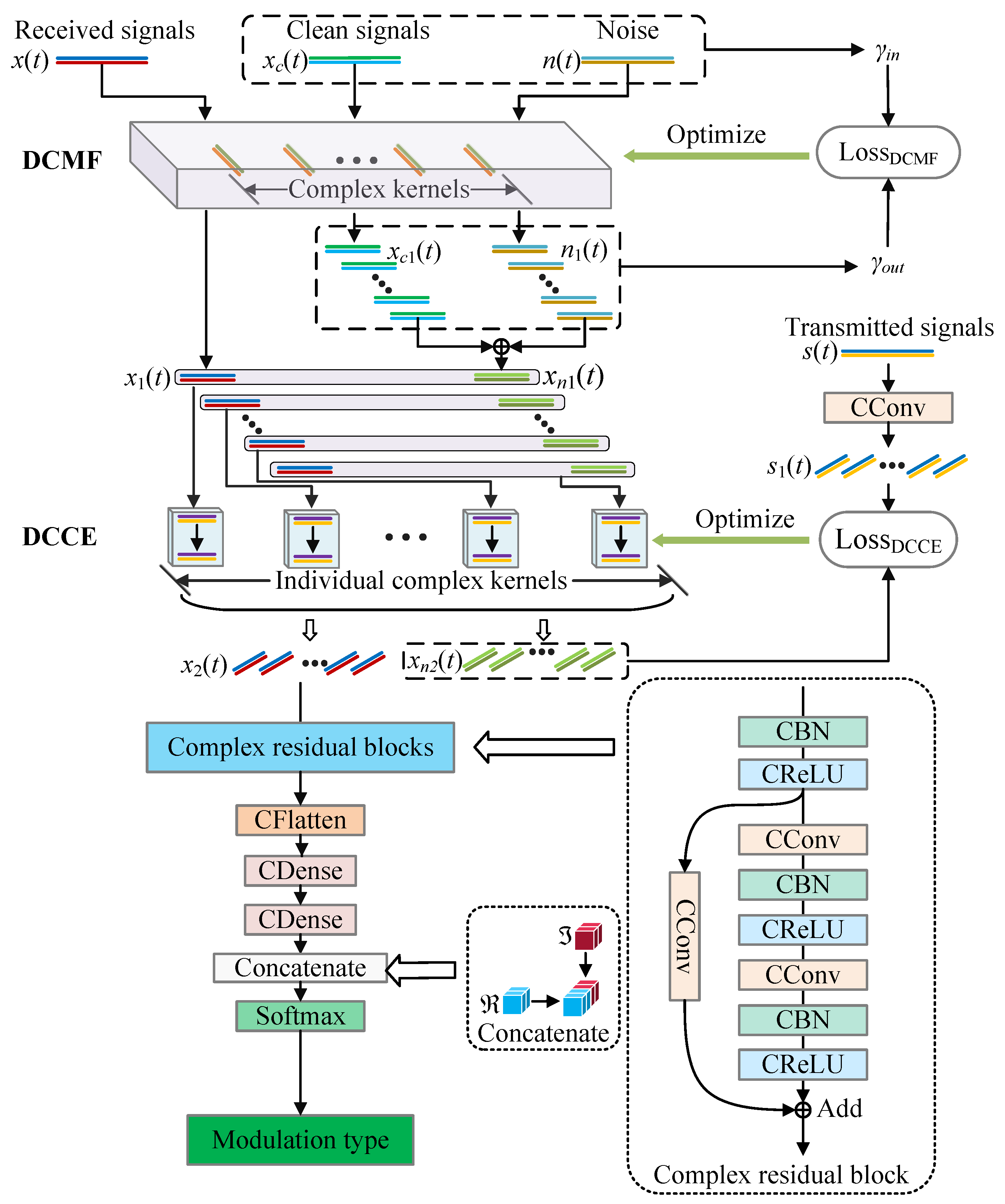
2.2. DCN-Based AMC Method
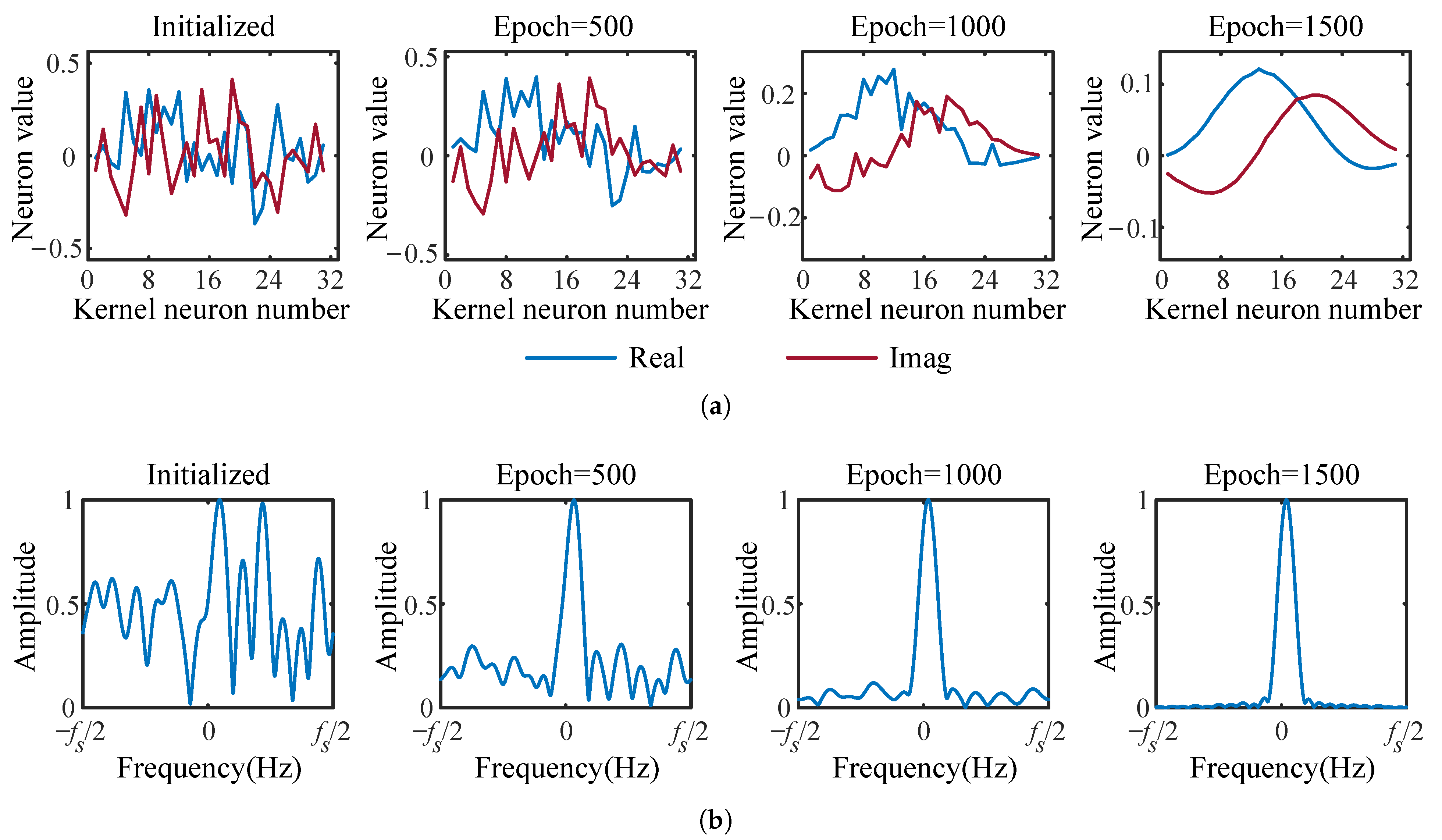
2.2.1. Deep Complex Matched Filter
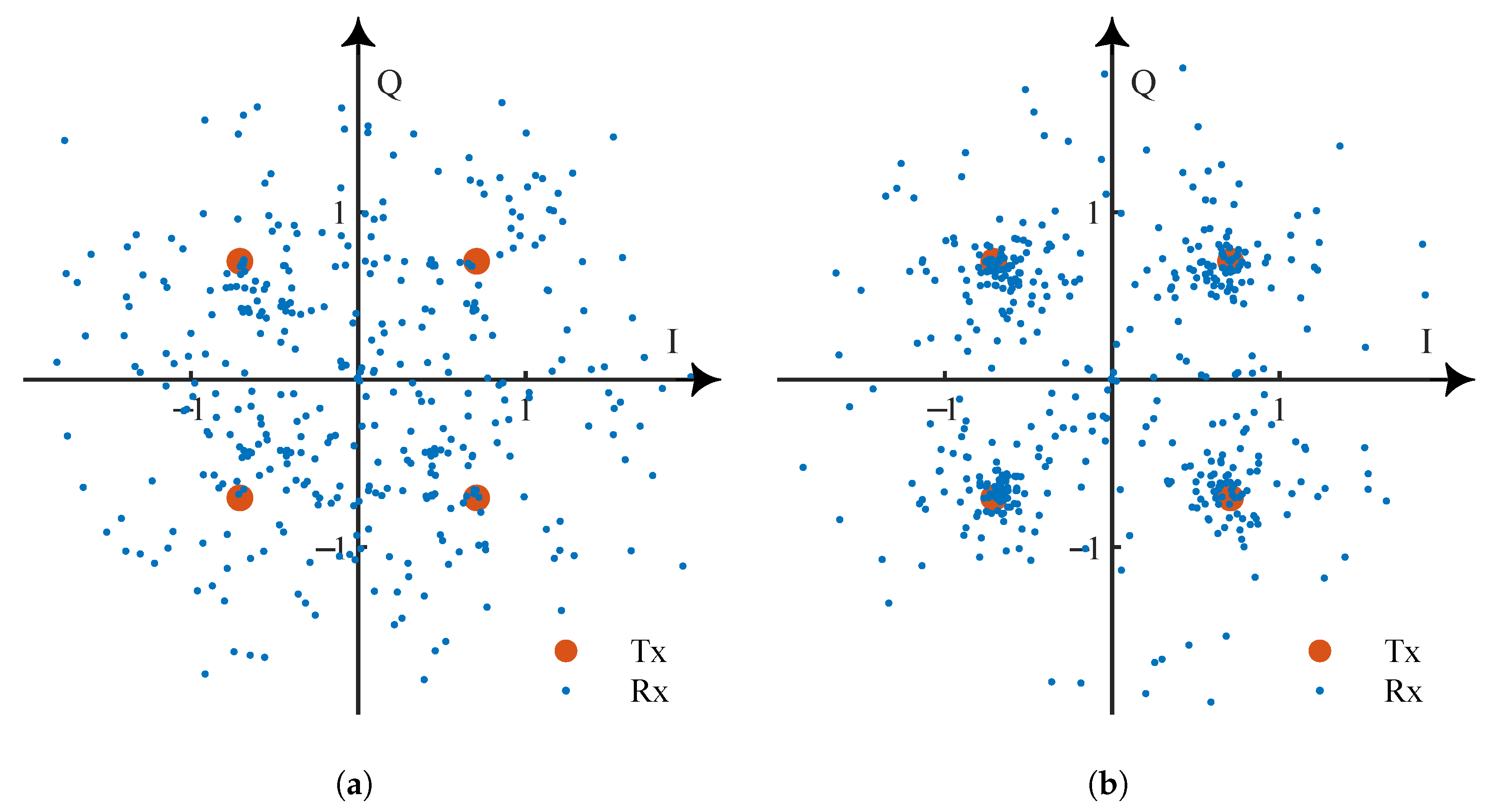
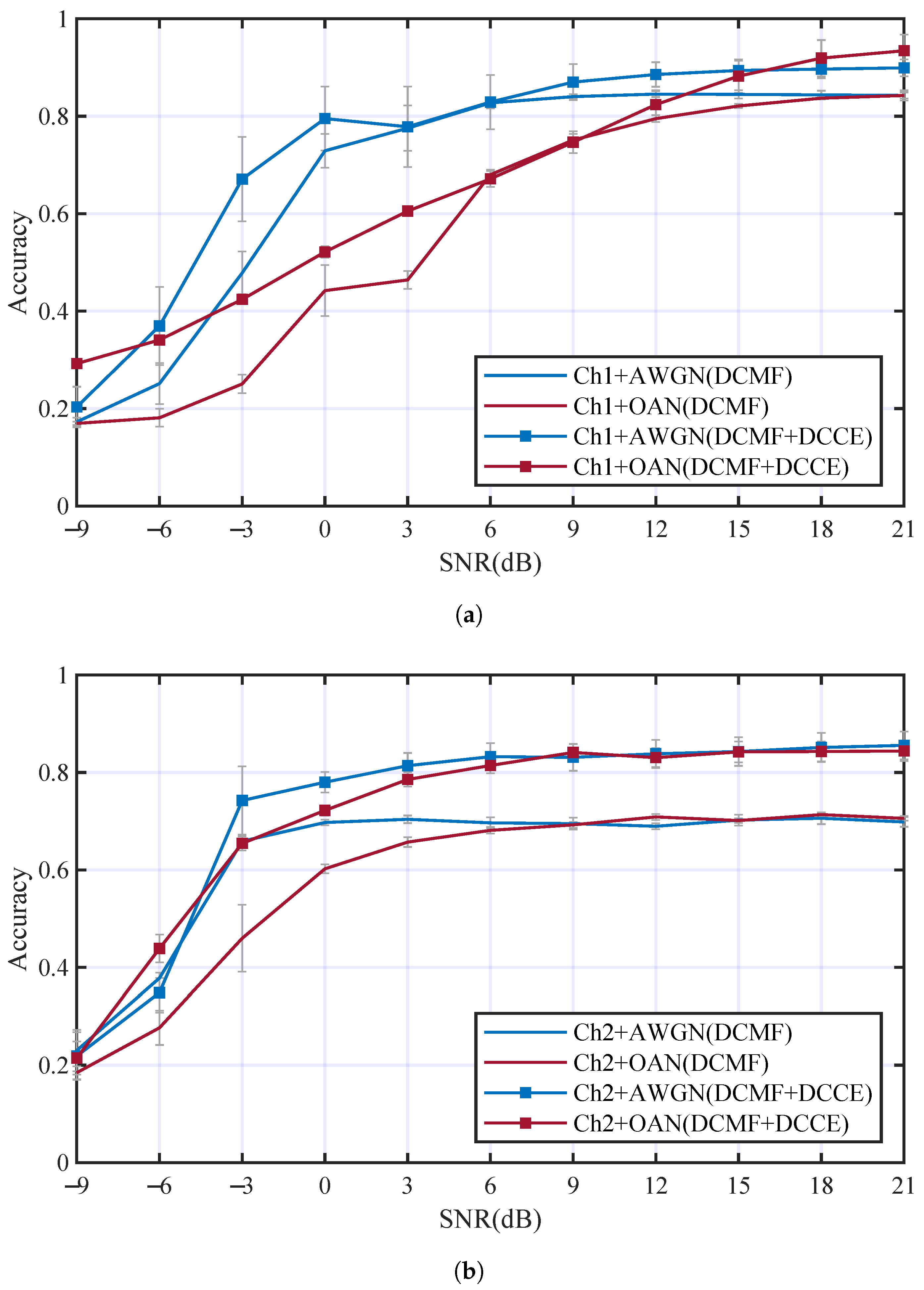
2.2.2. Deep Complex Channel Equalizer
2.2.3. Training Method
| Algorithm 1 Training of the proposed method. |
Input: received signals , true labels y, clean received signals without noise , additive noise , transmitted signals , maximum iterations N. Output: trained parameters of : , , . Initialize: trainable parameters of : , , , , .
|
3. Experiments and Discussion
3.1. Dataset and Parameters
3.1.1. Signals Generation
3.1.2. Underwater Acoustic Channel
3.2. Experiment Results Analysis
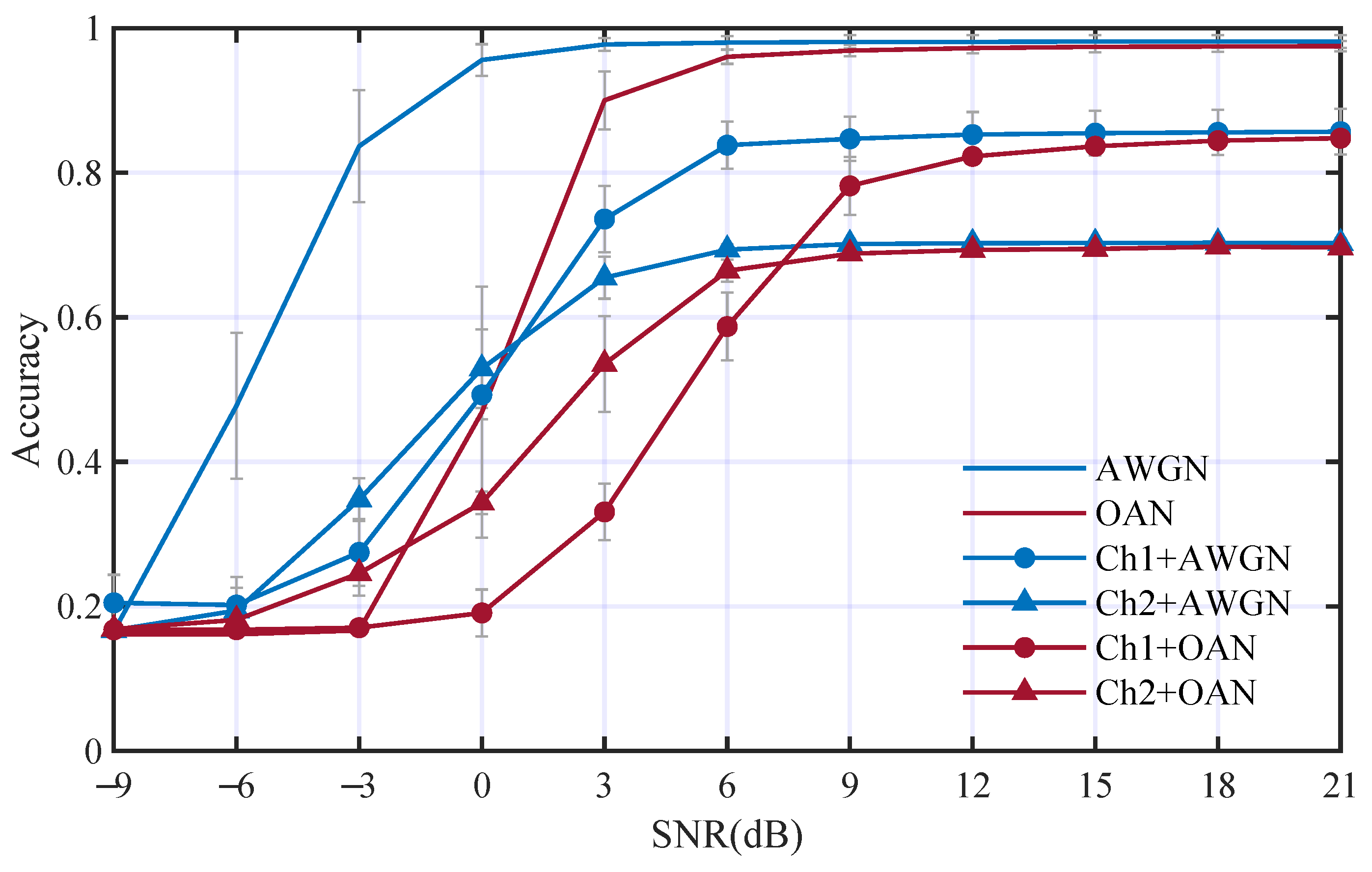
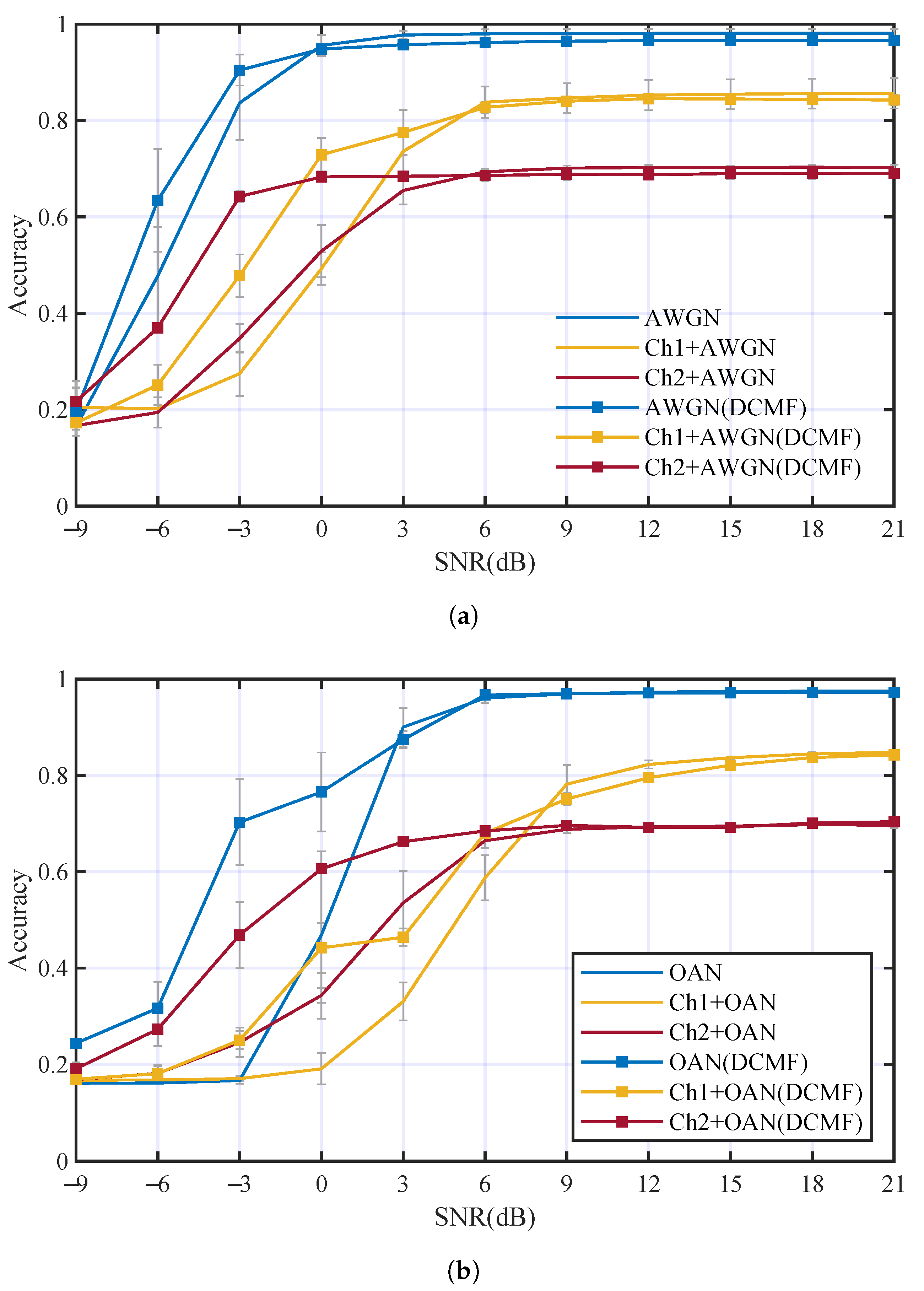
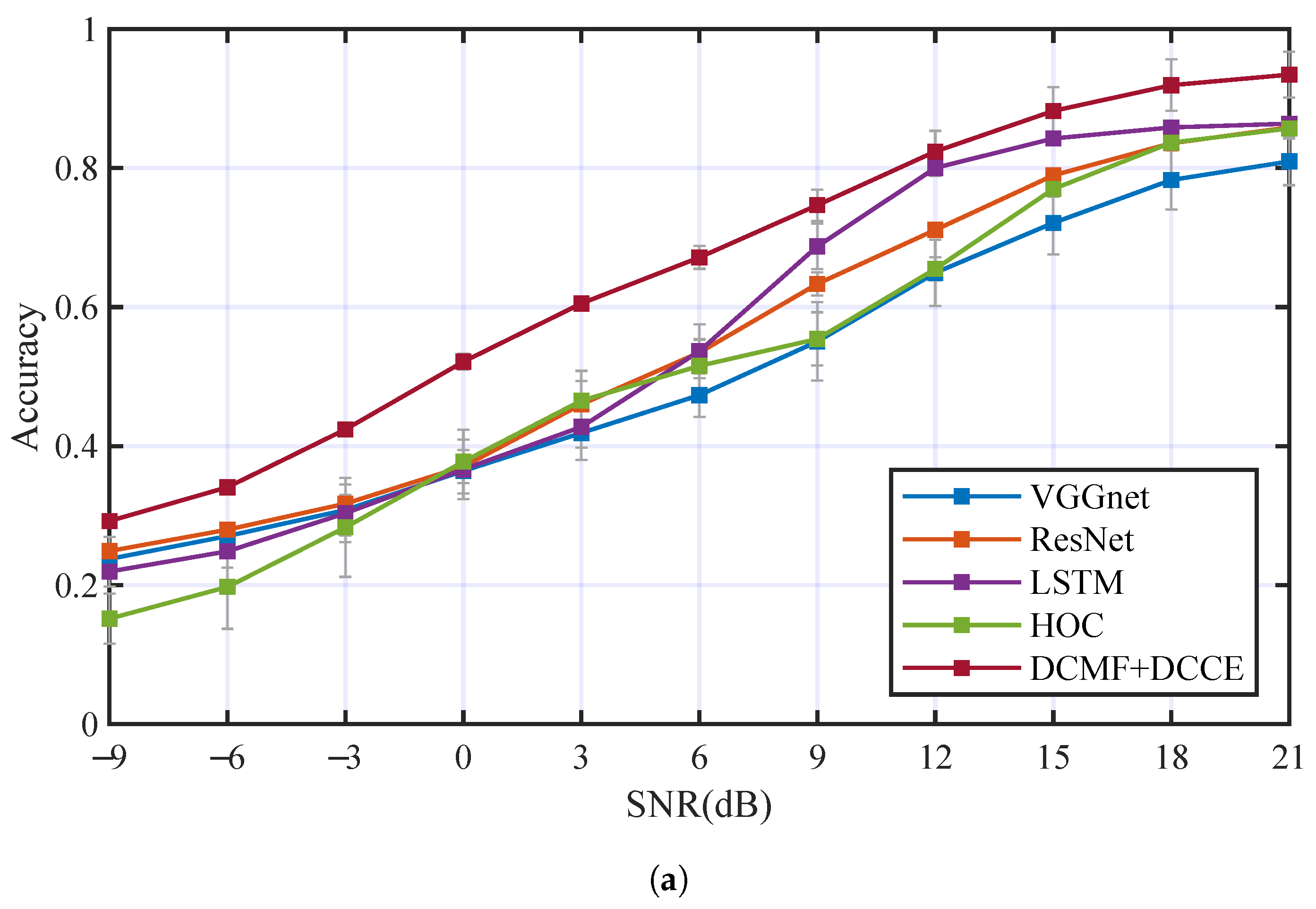
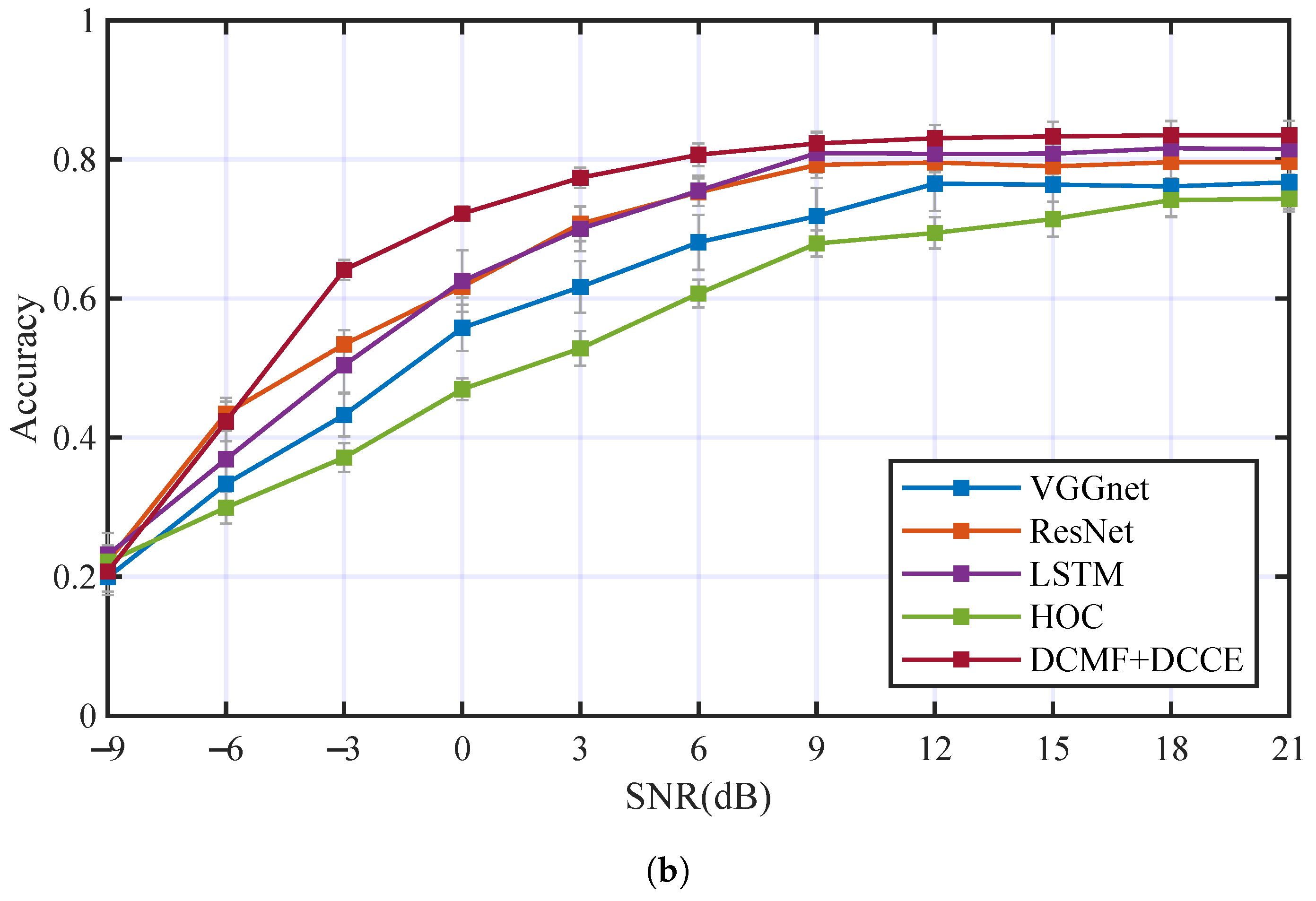
3.2.1. Influence Analysis of Underwater Acoustic Channel
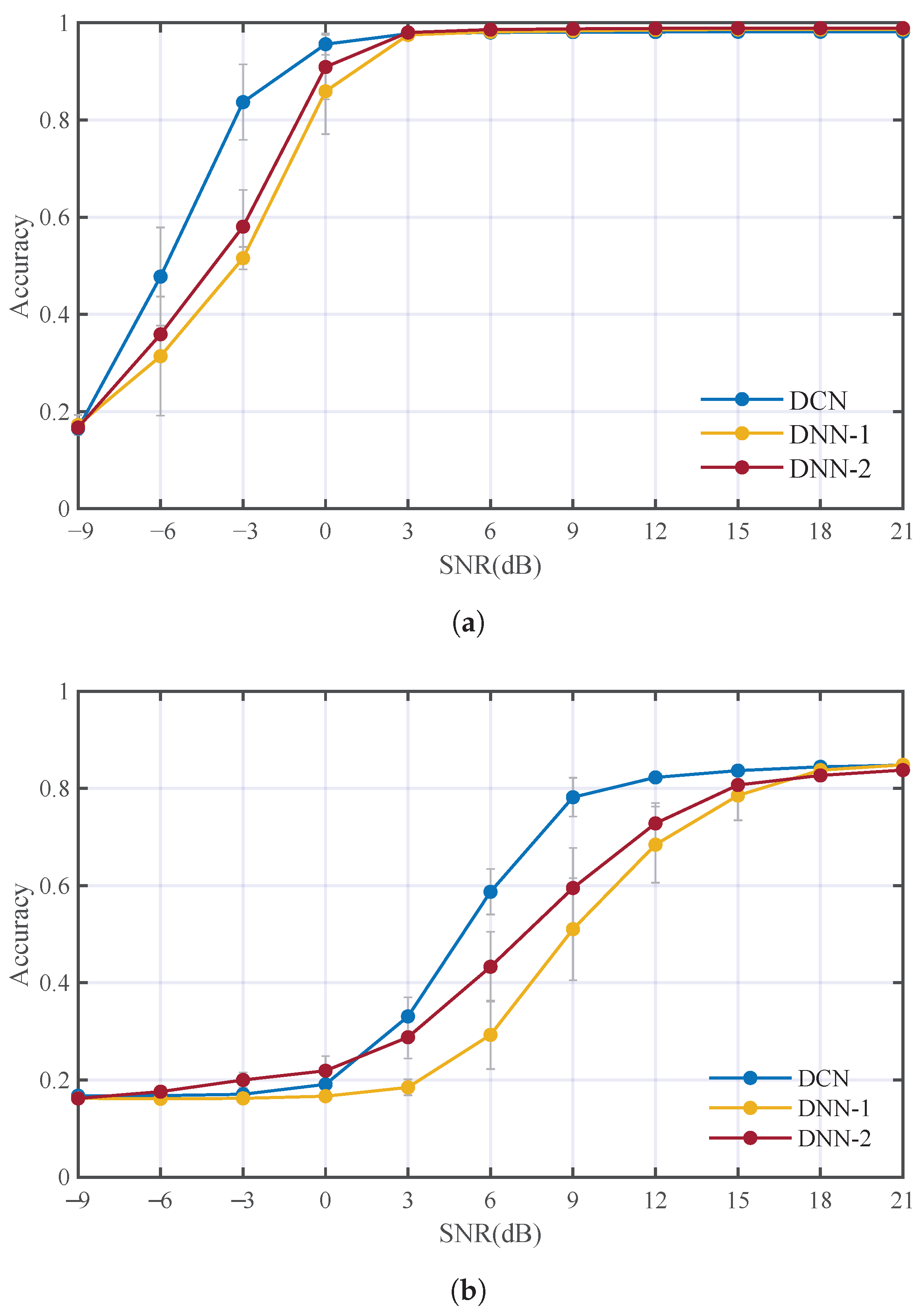
3.2.2. Comparison with Real-Valued DNN
3.2.3. Performance Analysis of Deep Complex Matched Filter
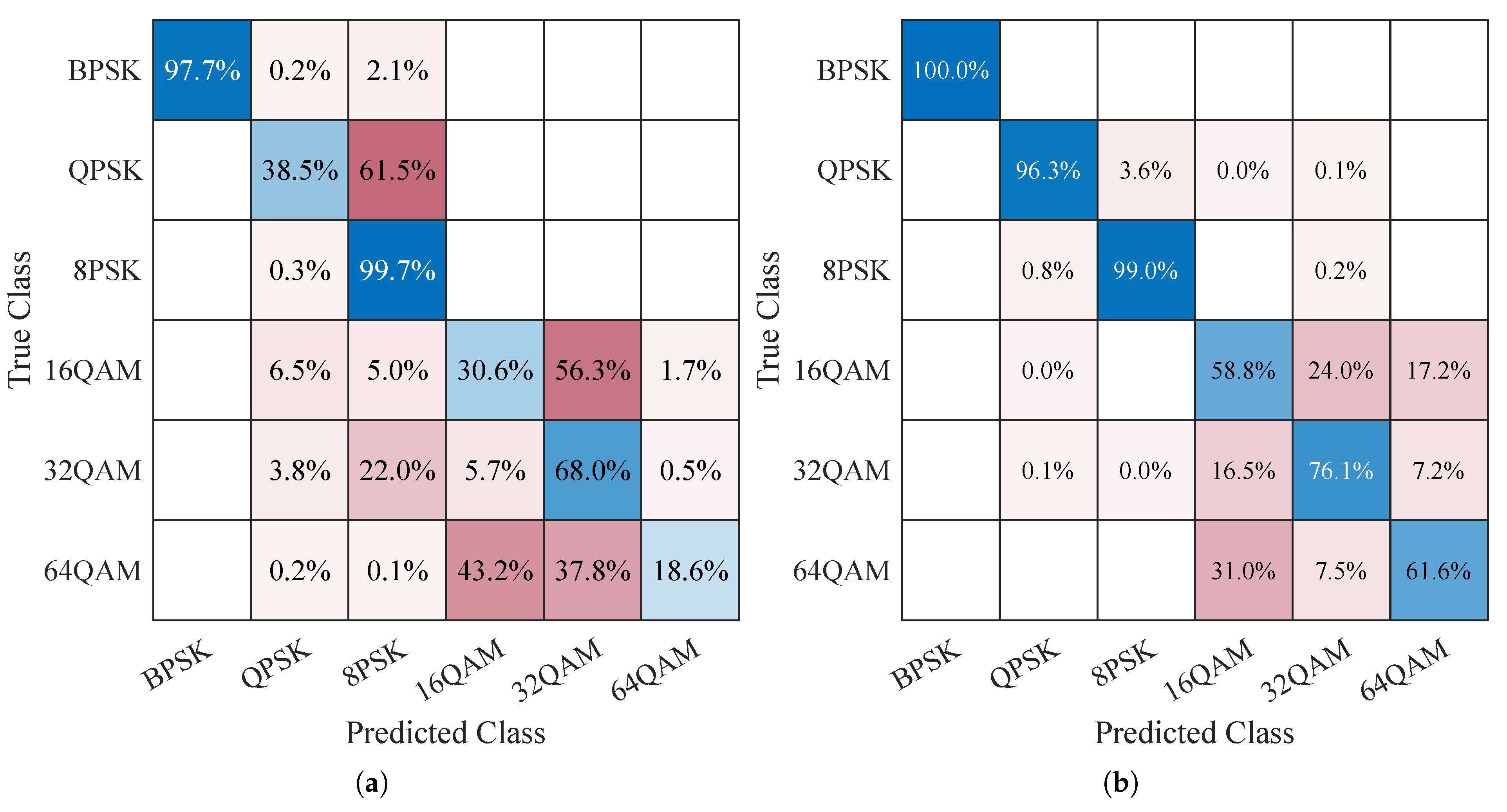
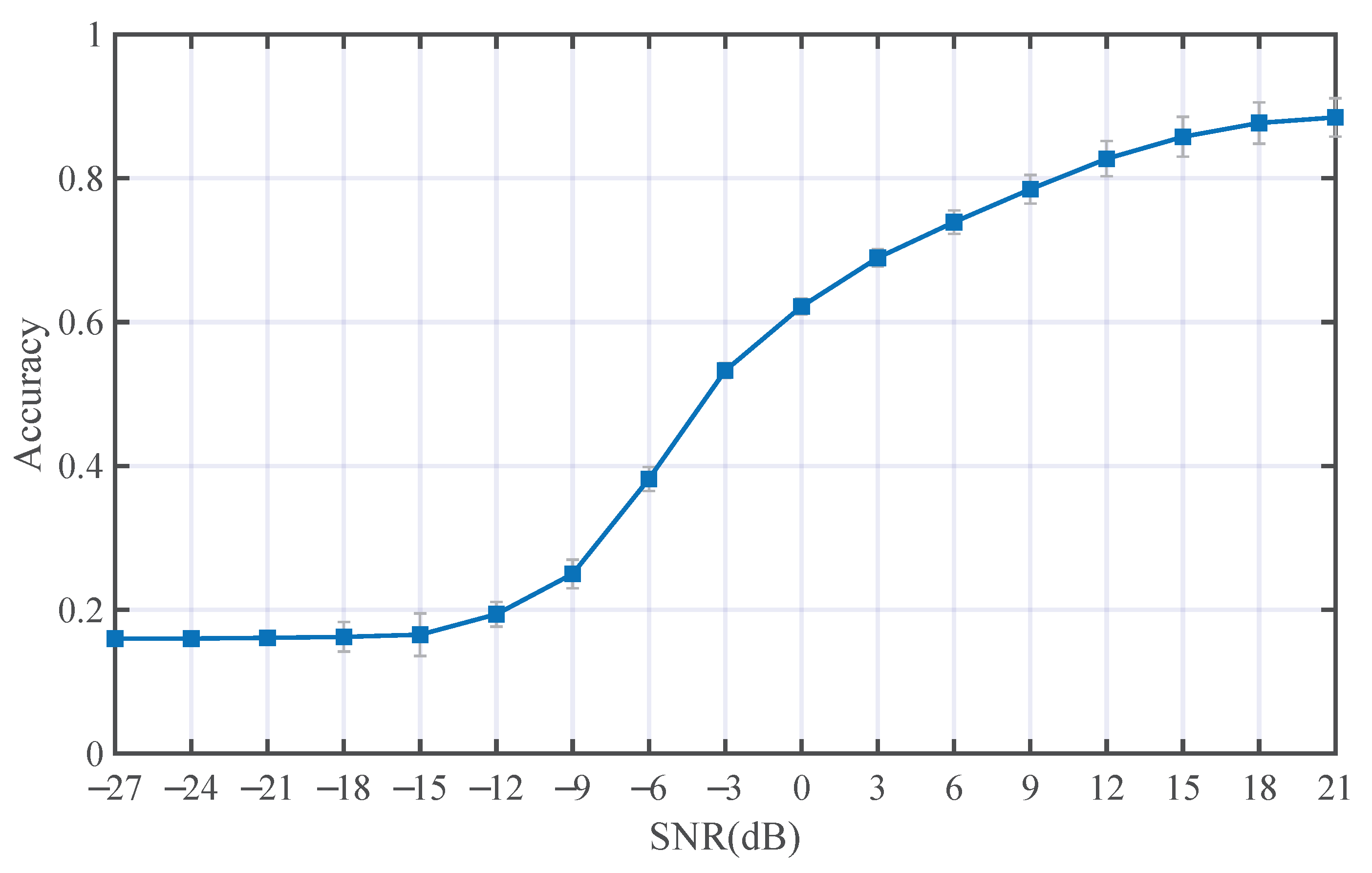
3.2.4. Performance Analysis of Proposed Method
3.2.5. Comparison with Achieved AMC Methods
3.2.6. Limitations of the Proposed Method
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| DCN | Deep complex networks |
| OAN | Ocean ambient noise |
| AMC | Automatic modulation classification |
| DCMF | Deep complex matched filter |
| DCCE | Deep complex channel equalizer |
| AUVs | Automatic underwater vehicles |
| UUVs | Underwater unmanned vehicles |
| HOC | High-order cumulant |
| ISI | Inter-symbol interference |
| PSK | Phase shift keying |
| QAM | Quadrature amplitude modulation |
| DNN | Deep neural networks |
| DBN | Deep belief networks |
| CNN | Convolution neural networks |
| LSTM | Long short term memory |
| AE | Autoencoder |
| GAN | Generative adversarial networks |
| DAE | Denoising autoencoder |
| AWGN | Additive white Gaussian noise |
| SSB | Single side band |
| FM | Frequency modulation |
| FSK | Frequency shift keying |
| OFDM | Orthogonal frequency division multiplexing |
| MC-MFSK | Multi-carrier multiple frequency shift keying |
| CConv | Complex convolution |
| CBN | Complex batch-normalization |
| MSE | Mean square error |
References
- Yao, X.; Yang, H.; Li, Y. Modulation identification of underwater acoustic communications signals based on generative adversarial networks. In Proceedings of the OCEANS 2019—Marseille, Marseille, France, 17–20 June 2019; Volume 2019, pp. 1–6. [Google Scholar] [CrossRef]
- Huang, S.; Jiang, Y.; Qin, X.; Gao, Y.; Feng, Z.; Zhang, P. Automatic modulation classification of overlapped sources using multi-gene genetic programming with structural risk minimization principle. IEEE Access 2018, 6, 48827–48839. [Google Scholar] [CrossRef]
- Fang, T.; Wang, Q.; Zhang, L.; Liu, S. Modulation Mode Recognition Method of Non-Cooperative Underwater Acoustic Communication Signal Based on Spectral Peak Feature Extraction and Random Forest. Remote Sens. 2022, 14, 1603. [Google Scholar] [CrossRef]
- Xueyi, G.; Adam, Z. An eigenpath underwater acoustic communication channel model. In Proceedings of the 1995 MTS/IEEE Oceans Conference, San Diego, CA, USA, 9–12 October 1995; Volume 2, pp. 1189–1196. [Google Scholar] [CrossRef]
- Honghui, Y.; Junhao, L.; Meiping, S. Underwater acoustic target multi-attribute correlation perception method based on deep learning. Appl. Acoust. 2022, 190, 108644. [Google Scholar] [CrossRef]
- Li, Y.; Tang, B.; Geng, B.; Jiao, S. Fractional Order Fuzzy Dispersion Entropy and Its Application in Bearing Fault Diagnosis. Fractal Fract. 2022, 6, 544. [Google Scholar] [CrossRef]
- Li, Y.; Geng, B.; Jiao, S. Dispersion entropy-based Lempel-Ziv complexity: A new metric for signal analysis. Chaos Solitons Fractals 2022, 161, 112400. [Google Scholar] [CrossRef]
- Azzouz, E.E.; Nandi, A.K. Automatic identification of digital modulation types. Signal Process. 1995, 47, 55–69. [Google Scholar] [CrossRef]
- Wang, L.; Li, Y. Constellation based signal modulation recognition for MQAM. In Proceedings of the 9th IEEE International Conference on Communication Software and Networks, ICCSN 2017, Guangzhou, China, 6–8 May 2017; Volume 2017, pp. 826–829. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, U.; Kim, S.C. Spectrogram-based automatic modulation recognition using convolutional neural network. In Proceedings of the 10th International Conference on Ubiquitous and Future Networks, ICUFN 2018, Prague, Czech Republic, 3–6 July 2018; Volume 2018, pp. 843–845. [Google Scholar] [CrossRef]
- Vanhoy, G.; Asadi, H.; Volos, H.; Bose, T. Multi-receiver modulation classification for non-cooperative scenarios based on higher-order cumulants. Analog. Integr. Circuits Signal Process. 2021, 106, 1–7. [Google Scholar] [CrossRef]
- Wenxuan, C.; Yuan, J.; Lin, Z.; Yang, Z. A new modulation recognition method based on wavelet transform and high-order cumulants. J. Phys. Conf. Ser. 2021, 1738, 012025. [Google Scholar] [CrossRef]
- Sanderson, J.; Li, X.; Liu, Z.; Wu, Z. Hierarchical blind modulation classification for underwater acoustic communication signal via cyclostationary and maximal likelihood analysis. In Proceedings of the Military Communications Conference, Milcom 2013, San Diego, CA, USA, 18–20 November 2013; pp. 29–34. [Google Scholar] [CrossRef]
- Wu, Z.; Yang, T.C.; Liu, Z.; Chakarvarthy, V. Modulation detection of underwater acoustic communication signals through cyclostationary analysis. In Proceedings of the Military Communications Conference, 2012 Milcom, Orlando, FL, USA, 29 October–1 November 2012; pp. 1–6. [Google Scholar] [CrossRef]
- Wang, L.; Guo, S.; Jia, C. Recognition of digital modulation signals based on wavelet amplitude difference. In Proceedings of the 7th IEEE International Conference on Software Engineering and Service Science, ICSESS 2016, Beijing, China, 26–28 August 2016; pp. 627–630. [Google Scholar] [CrossRef]
- Safavian, S.R.; Landgrebe, D. A survey of decision tree classifier methodology. IEEE Trans. Syst. Man Cybern. 1991, 21, 660–674. [Google Scholar] [CrossRef]
- Lippmann, R.P. Pattern classification using neural networks. IEEE Commun. Mag. 1989, 27, 47–50. [Google Scholar] [CrossRef]
- Cortes, C.; Vapnik, V. Support-vector networks. Mach. Learn. 1995, 20, 273–297. [Google Scholar] [CrossRef]
- Zhao, Z.; Wang, S.; Zhang, W.; Xie, Y. A novel automatic modulation classification method based on Stockwell-transform and energy entropy for underwater acoustic signals. In Proceedings of the IEEE International Conference on Signal Processing, Communications and Computing, Hong Kong, China, 5–8 August 2016. [Google Scholar] [CrossRef]
- Fang, T.; Xia, Z.; Liu, S.; Wu, X.; Zhang, L. Blind modulation identification of underwater acoustic MPSK using sparse Bayesian learning and expectation maximization. Appl. Sci. 2020, 10, 5919. [Google Scholar] [CrossRef]
- Hinton, G.E.; Osindero, S.; Teh, Y.W. A fast learning algorithm for deep belief nets. Neural Comput. 2006, 18, 1527–1554. [Google Scholar] [CrossRef]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]
- Cho, K.; Merrienboer, B.V.; Gulcehre, C.; Bougares, F.; Bengio, Y.J.C.S. Learning phrase representations using RNN encoder-decoder for statistical machine translation. Comput. Sci. 2014, 2014, 1724–1734. [Google Scholar] [CrossRef]
- Sak, H.; Senior, A.; Rao, K.; Beaufays, F. Fast and accurate recurrent neural network acoustic models for speech recognition. arXiv 2015, arXiv:1507.06947. [Google Scholar]
- Bengio, Y.; Lamblin, P.; Popovici, D.; Larochelle, H. Greedy layer-wise training of deep networks. In Proceedings of the 20th Annual Conference on Neural Information Processing Systems, NIPS 2006, Vancouver, BC, Canada, 4–7 December 2006; pp. 153–160. [Google Scholar]
- Hochreiter, S.; Schmidhuber, J. Long short-term memory. Neural Comput. 1997, 9, 1735–1780. [Google Scholar] [CrossRef]
- Vincent, P.; Larochelle, H.; Bengio, Y.; Manzagol, P.A. Extracting and composing robust features with denoising autoencoders. In Proceedings of the 25th International Conference on Machine Learning, ICML 2008, Helsinki, Finland, 5–9 July 2008; pp. 1096–1103. [Google Scholar] [CrossRef]
- Simonyan, K.; Zisserman, A. Very deep convolutional networks for large-scale image recognition. arXiv 2014, arXiv:1409.1556. [Google Scholar]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, CVPR 2015, Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar] [CrossRef]
- Goodfellow, I.J.; Pouget-Abadie, J.; Mirza, M.; Xu, B.; Warde-Farley, D.; Ozair, S.; Courville, A.; Bengio, Y. Generative adversarial networks. In Proceedings of the 28th Annual Conference on Neural Information Processing Systems 2014, Montreal, QC, Canada, 8–13 December 2014; Volume 3, pp. 2672–2680. [Google Scholar]
- Yang, H.; Shen, S.; Xiong, J.; Zhang, X. Modulation recognition of underwater acoustic communication signals based on denoising & deep sparse autoencoder. In Proceedings of the 45th International Congress and Exposition on Noise Control Engineering: Towards a Quieter Future (INTER-NOISE 2016), Hamburg, Germany, 21–24 August 2016; pp. 5144–5149. [Google Scholar]
- West, N.E.; O’Shea, T. Deep architectures for modulation recognition. In Proceedings of the 2017 IEEE International Symposium on Dynamic Spectrum Access Networks (DySPAN), Baltimore, MD, USA, 6–9 March 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Li-Da, D.; Shi-Lian, W.; Wei, Z. Modulation classification of underwater acoustic communication signals based on deep learning. In Proceedings of the 2018 OCEANS—MTS/IEEE Kobe Techno-Oceans, OCEANS—Kobe 2018, Kobe, Japan, 28–31 May 2018; pp. 1–4. [Google Scholar] [CrossRef]
- Shea, T.J.; West, N. Radio machine learning dataset generation with GNU radio. In Proceedings of the GNU Radio Conference, Boulder, CO, USA, 12–16 September 2016; Volume 1. Available online: https://pubs.gnuradio.org/index.php/grcon/article/view/11 (accessed on 10 January 2023).
- Nitta, T. On the critical points of the complex-valued neural network. In Proceedings of the 9th International Conference on Neural Information Processing, ICONIP 2002, Singapore, 18–22 November 2002; Volume 3, pp. 1099–1103. [Google Scholar] [CrossRef]
- Hirose, A.; Yoshida, S. Generalization characteristics of complex-valued feedforward neural networks in relation to signal coherence. IEEE Trans. Neural Netw. Learn. Syst. 2012, 23, 541–551. [Google Scholar] [CrossRef]
- Trabelsi, C.; Bilaniuk, O.; Serdyuk, D.; Subramanian, S.; Santos, J.F.; Mehri, S.; Rostamzadeh, N.; Bengio, Y.; Pal, C.J. Deep complex networks. arXiv 2017, arXiv:1705.09792. [Google Scholar]
- Hong, L.; Fanghua, X.; Wei, Z.; Dongxiao, W.; Zenghong, L. Development of a global gridded Argo data set with Barnes successive corrections. J. Geophys. Res. Ocean. 2017, 122, 866–889. [Google Scholar] [CrossRef]
- O’Shea, T.J.; Roy, T.; Clancy, T.C. Over-the-Air Deep Learning Based Radio Signal Classification. IEEE J. Sel. Top. Signal Process. 2018, 12, 168–179. [Google Scholar] [CrossRef]
- Wu, P.; Sun, B.; Su, S.; Wei, J.; Wen, X. Automatic Modulation Classification Based on Deep Learning for Software-Defined Radio. Math. Probl. Eng. 2020, 2020, 2678310. [Google Scholar] [CrossRef]
- Qi, P.; Zhou, X.; Zheng, S.; Li, Z. Automatic Modulation Classification Based on Deep Residual Networks With Multimodal Information. IEEE Trans. Cogn. Commun. Netw. 2021, 7, 21–33. [Google Scholar] [CrossRef]
- Karahan, S.N.; Kalaycioğlu, A. Deep Learning Based Automatic Modulation Classification With Long-Short Term Memory Networks. In Proceedings of the 2020 28th Signal Processing and Communications Applications Conference (SIU), Gaziantep, Turkey, 5–7 October 2020; pp. 1–4. [Google Scholar] [CrossRef]
- Hamza, M.A.; Hassine, S.B.; Larabi-Marie-Sainte, S.; Nour, M.K.; Al-Wesabi, F.N.; Motwakel, A.; Hilal, A.M.; Al Duhayyim, M. Optimal Bidirectional LSTM for Modulation Signal Classification in Communication Systems. Cmc-Comput. Mater. Contin. 2022, 72, 3055–3071. [Google Scholar] [CrossRef]
- Ge, Z.; Jiang, H.; Guo, Y.; Zhou, J. Accuracy Analysis of Feature-Based Automatic Modulation Classification via Deep Neural Network. Sensors 2021, 21, 8252. [Google Scholar] [CrossRef]
- Li, T.; Li, Y.; Dobre, O.A. Modulation Classification Based on Fourth-Order Cumulants of Superposed Signal in NOMA Systems. IEEE Trans. Inf. Forensics Secur. 2021, 16, 2885–2897. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Sampling rate (Hz) | 12 k |
| Carrier frequency offset (Hz) | 300 |
| Symbol rate (Baud) | 800∼1200 |
| Roll off value | 0.1∼0.4 |
| SNR (dB) | −9∼21 |
| 1 | 1.965 | 0.861 | 3.276 | −1 |
| 2 | 2.046 | 0.8 + 0.599j | 3.334 | 0.305 + 0.903j |
| 3 | 2.074 | −0.945 − 0.153j | 3.35 | −0.358 − 0.848j |
| 4 | 2.279 | −0.143 | 3.357 | 0.483 + 0.72j |
| 5 | - | - | 3.482 | −0.437 |
| Accuracy | 73% | 69% | 64% | 71% |
| Ch1+OAN | 50.78% | 54.94% | 55.95% | 51.48% | 65.1% |
| Ch2+OAN | 59.95% | 65.79% | 65.82% | 55.17% | 70.27% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yao, X.; Yang, H.; Sheng, M. Automatic Modulation Classification for Underwater Acoustic Communication Signals Based on Deep Complex Networks. Entropy 2023, 25, 318. https://doi.org/10.3390/e25020318
Yao X, Yang H, Sheng M. Automatic Modulation Classification for Underwater Acoustic Communication Signals Based on Deep Complex Networks. Entropy. 2023; 25(2):318. https://doi.org/10.3390/e25020318
Chicago/Turabian StyleYao, Xiaohui, Honghui Yang, and Meiping Sheng. 2023. "Automatic Modulation Classification for Underwater Acoustic Communication Signals Based on Deep Complex Networks" Entropy 25, no. 2: 318. https://doi.org/10.3390/e25020318