


Orthogonal Time Frequency Space Modulation Based on the Discrete Zak Transform

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Discrete Zak Transform
2.1. Definition and Relations
2.2. Properties of the DZT
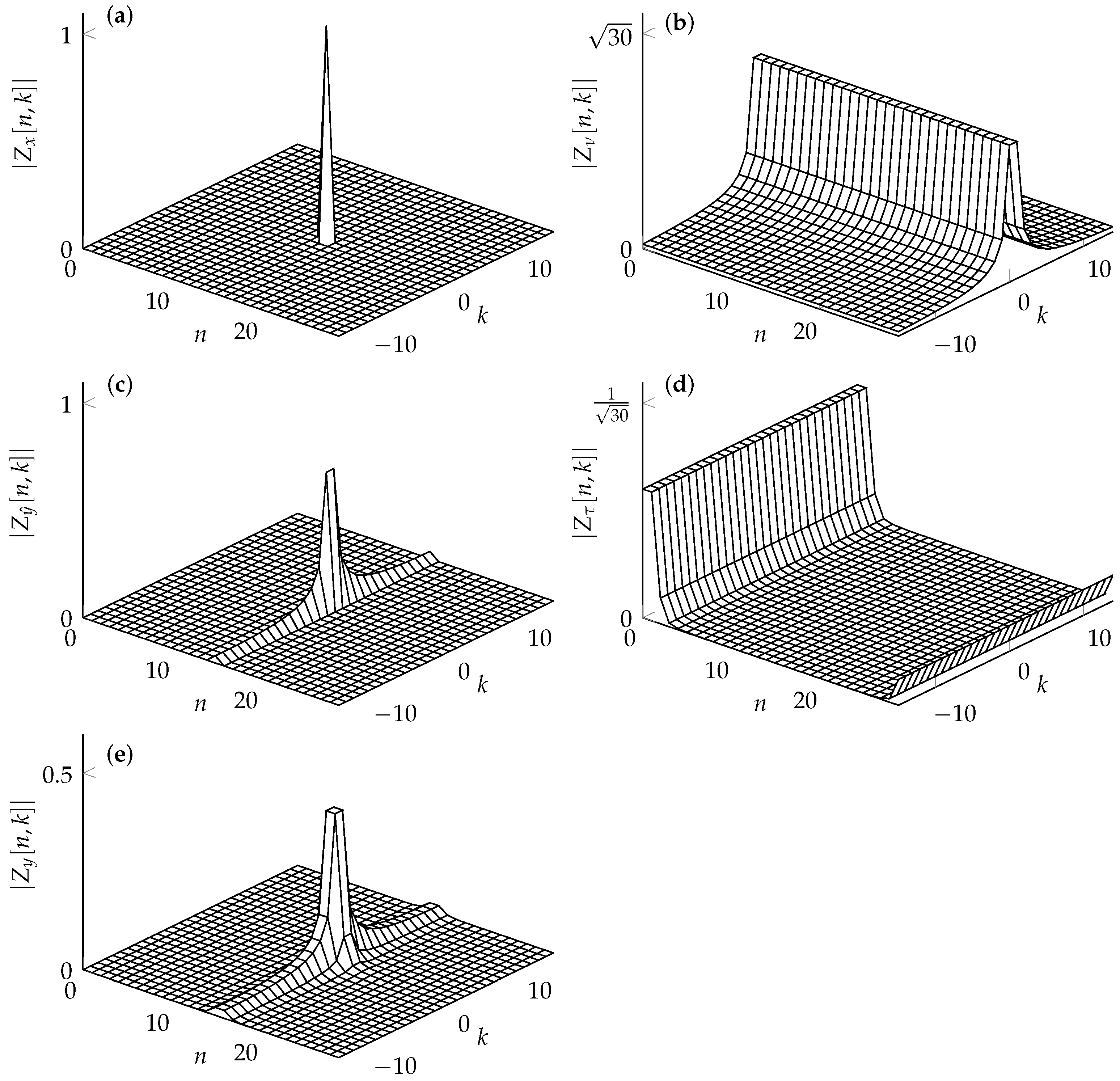
2.3. Signal Transform Properties
- 1.
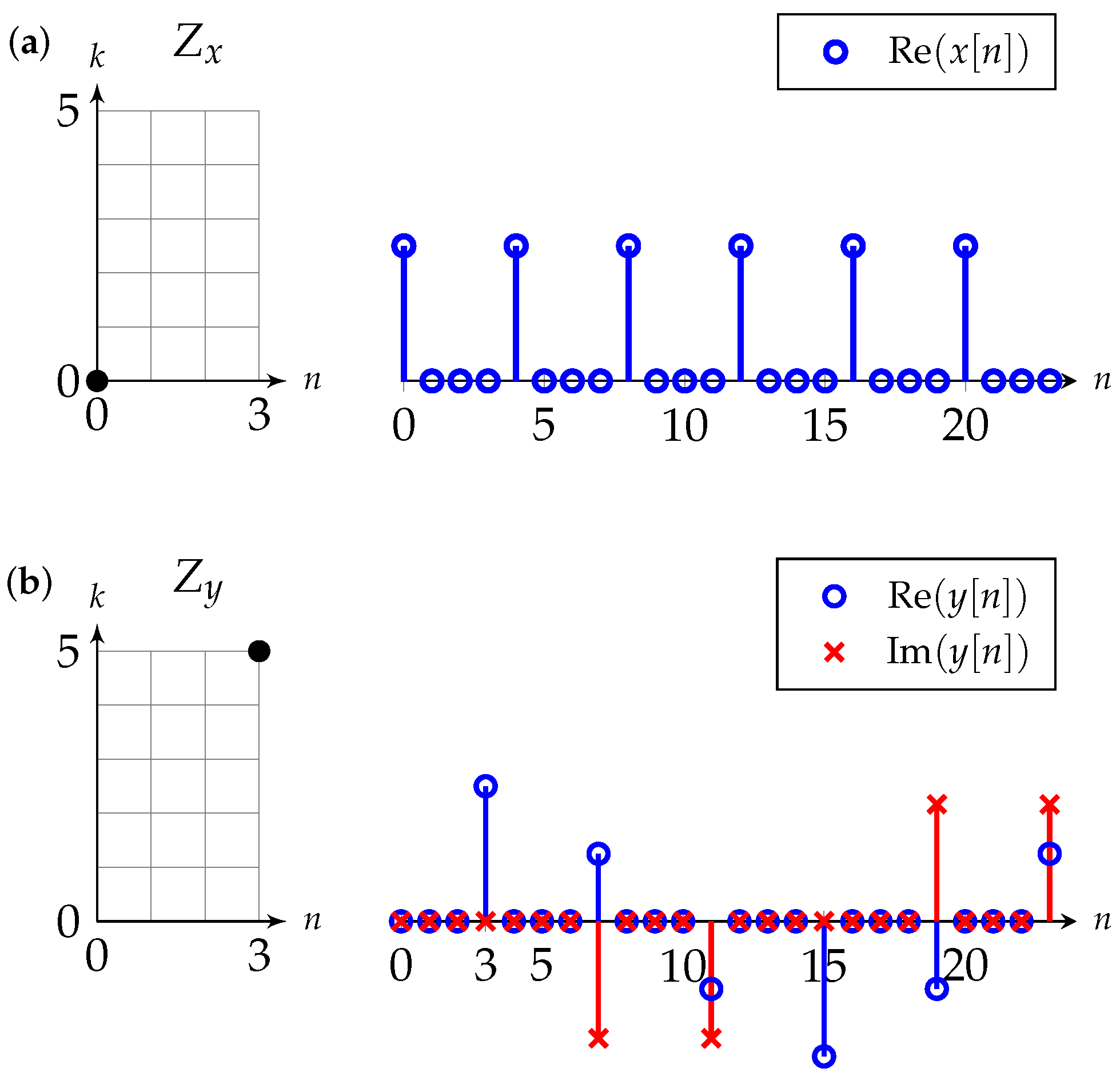
- Shift: Let y be the shifted version of x, i.e., ; then,
- 2.
- Modulation: Let be the elementwise product of x and y, i.e., . Then,i.e., the DZT of the element-wise multiplication is a scaled convolution with respect to the variable k.
- 3.
- Circular Convolution: Consider , i.e., the circular convolution of x and y. Then, the DZT isi.e., the DZT of a circular convolution is the scaled convolution with respect to the variable n up to a constant.
3. System Model
3.1. Transmitter
3.2. Channel Model
3.3. Receiver
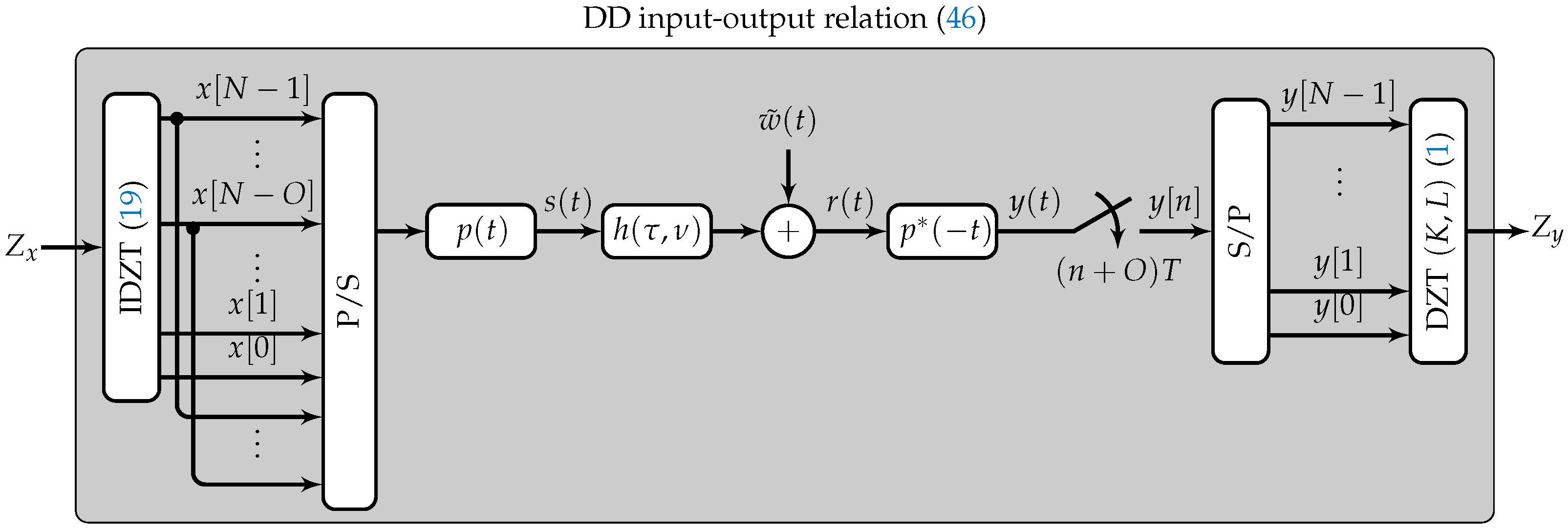
4. Delay Doppler Input–Output Relationship
5. OTFS Overlay for OFDM
6. DD Channel Capacity
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Data Availability Statement
Conflicts of Interest
Appendix A. Proof of Relation (14)
Appendix B. Proof of Relation (16)
Appendix C. Proof of Relation (25)
Appendix D. Proof of the Modulation Property
Appendix E. Proof of the Convolution Property
Appendix F. Proof of Theorem 1
References
- Monk, A.; Hadani, R.; Tsatsanis, M.; Rakib, S. OTFS—Orthogonal Time Frequency Space. arXiv 2016, arXiv:1608.02993. [Google Scholar]
- Hadani, R.; Rakib, S.; Kons, S.; Tsatsanis, M.; Monk, A.; Ibars, C.; Delfeld, J.; Hebron, Y.; Goldsmith, A.J.; Molisch, A.F.; et al. Orthogonal Time Frequency Space Modulation. arXiv 2018, arXiv:1808.00519. [Google Scholar]
- Hadani, R.; Rakib, S.; Tsatsanis, M.; Monk, A.; Goldsmith, A.J.; Molisch, A.F.; Calderbank, R. Orthogonal Time Frequency Space Modulation. In Proceedings of the 2017 IEEE Wireless Communications and Networking Conference (WCNC), San Francisco, CA, USA, 19–22 March 2017; pp. 1–6. [Google Scholar]
- Hadani, R.; Rakib, S.; Molisch, A.F.; Ibars, C.; Monk, A.; Tsatsanis, M.; Delfeld, J.; Goldsmith, A.; Calderbank, R. Orthogonal Time Frequency Space (OTFS) modulation for millimeter-wave communications systems. In Proceedings of the 2017 IEEE MTT-S International Microwave Symposium (IMS), Honololu, HI, USA, 4–9 June 2017; pp. 681–683. [Google Scholar]
- Raviteja, P.; Phan, K.T.; Hong, Y.; Viterbo, E. Interference Cancellation and Iterative Detection for Orthogonal Time Frequency Space Modulation. IEEE Trans. Wirel. Commun. 2018, 17, 6501–6515. [Google Scholar] [CrossRef] [Green Version]
- Gaudio, L.; Kobayashi, M.; Caire, G.; Colavolpe, G. On the Effectiveness of OTFS for Joint Radar Parameter Estimation and Communication. IEEE Trans. Wirel. Commun. 2020, 19, 5951–5965. [Google Scholar] [CrossRef]
- Murali, K.R.; Chockalingam, A. On OTFS Modulation for High-Doppler Fading Channels. In Proceedings of the 2018 Information Theory and Applications Workshop (ITA), San Diego, CA, USA, 11–16 February 2018; pp. 1–10. [Google Scholar]
- Mohammed, S.K. Derivation of OTFS Modulation from First Principles. IEEE Trans. Veh. Technol. 2021, 70, 7619–7636. [Google Scholar] [CrossRef]
- Matz, G.; Bolcskei, H.; Hlawatsch, F. Time-Frequency Foundations of Communications: Concepts and Tools. IEEE Signal Process. Mag. 2013, 30, 87–96. [Google Scholar] [CrossRef]
- Bölcskei, H.; Hlawatsch, F. Discrete Zak transforms, polyphase transforms, and applications. IEEE Trans. Signal Process. 1997, 45, 851–866. [Google Scholar] [CrossRef] [Green Version]
- Chang, R.W. Synthesis of band-limited orthogonal signals for multichannel data transmission. Bell Syst. Tech. J. 1966, 45, 1775–1796. [Google Scholar] [CrossRef]
- Weinstein, S.; Ebert, P. Data Transmission by Frequency-Division Multiplexing Using the Discrete Fourier Transform. IEEE Trans. Commun. Technol. 1971, 19, 628–634. [Google Scholar] [CrossRef]
- Farhang, A.; RezazadehReyhani, A.; Doyle, L.E.; Farhang-Boroujeny, B. Low Complexity Modem Structure for OFDM-Based Orthogonal Time Frequency Space Modulation. IEEE Wirel. Commun. Lett. 2018, 7, 344–347. [Google Scholar] [CrossRef] [Green Version]
- Richards, M.; Scheer, J.; Holm, W. Principles of Modern Radar, 1st ed.; ASciTech Publishing: Edison, NJ, USA, 2010. [Google Scholar]
- Skollnik, M. Introduction to Radar Systems, 3rd ed.; McGraw Hill Education: New York, NY, USA, 2001. [Google Scholar]
- Bondre, A.S.; Richmond, C.D. Dual-Use of OTFS Architecture for Pulse Doppler Radar Processing. In Proceedings of the 2022 IEEE Radar Conference (RadarConf22), New York, NY, USA, 21–25 March 2022; pp. 1–6. [Google Scholar]
- Lampel, F.; Avarado, A.; Willems, F.M. On OTFS using the Discrete Zak Transform. In Proceedings of the 2022 IEEE International Conference on Communications Workshops (ICC Workshops), Seoul, Republic of Korea, 16–20 May 2022; pp. 729–734. [Google Scholar]
- Schempp, W. Radar ambiguity functions, the Heisenberg group, and holomorphic theta series. Proc. Am. Math. Soc. 1984, 92, 103–110. [Google Scholar] [CrossRef]
- Zak, J. Finite Translation in Solid-State Physics. Phys. Rev. Lett. 1967, 19, 1385–1397. [Google Scholar] [CrossRef]
- Janssen, A. The Zak Transform: A Signal Transform for Sampled Time-Continuous Signals. Philips J. Res. 1988, 43, 23–69. [Google Scholar]
- Vetterli, M.; Kovačević, J.; Goyal, V.K. Foundations of Signal Processing, 1st ed.; Cambridge University Press: Cambridge, UK, 2014. [Google Scholar]
- An, M.; Brodzik, A.; Gertner, I.; Tolimieri, R. Weyl-Heisenberg Systems and the Finite Zak Transform. In Signal and Image Representation in Combined Spaces; Coifman, Y.Z.R., Ed.; Wavelet Analysis and Its Applications; Academic Press: San Diego, CA, USA, 1998; Volume 7, pp. 3–21. [Google Scholar]
- Barry, J.; Lee, E.; Messerschmitt, D. Digital Communication, 3rd ed.; Springer Science+Business Media: New York, NY, USA, 2004. [Google Scholar]
- Hlawatsch, F.; Matz, G. (Eds.) Wireless Communications Over Rapidly Time-Varying Channels, 1st ed.; Academic Press: Oxford, UK, 2011. [Google Scholar]
- Wexler, J.; Raz, S. Discrete Gabor expansions. Signal Process. 1990, 21, 207–220. [Google Scholar] [CrossRef]
- Molisch, A. Wireless Communications, 2nd ed.; Wiley: Chichester, UK, 2011. [Google Scholar]
- Goldsmith, A. Wireless Communications, 1st ed.; Cambridge University Press: New York, NY, USA, 2005. [Google Scholar]
- Stüber, G.L. Principles of Mobile Communications, 4th ed.; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Han, T.S. Information-Spectrum Methods in Information Theory, 1st ed.; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Dobrushin, R. General formulation of Shannon’s main theorem in information theory. Am. Math. Sot. Trans. 1963, 33, 323–438. [Google Scholar]
- Telatar, E. Capacity of multi-antenna Gaussian channels. Eur. Trans. Telecomm. 1999, 10, 585–595. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lampel, F.; Joudeh, H.; Alvarado, A.; Willems, F.M.J. Orthogonal Time Frequency Space Modulation Based on the Discrete Zak Transform. Entropy 2022, 24, 1704. https://doi.org/10.3390/e24121704
Lampel F, Joudeh H, Alvarado A, Willems FMJ. Orthogonal Time Frequency Space Modulation Based on the Discrete Zak Transform. Entropy. 2022; 24(12):1704. https://doi.org/10.3390/e24121704
Chicago/Turabian StyleLampel, Franz, Hamdi Joudeh, Alex Alvarado, and Frans M. J. Willems. 2022. "Orthogonal Time Frequency Space Modulation Based on the Discrete Zak Transform" Entropy 24, no. 12: 1704. https://doi.org/10.3390/e24121704