
Private Key and Decoder Side Information for Secure and Private Source Coding †




{kind=link}
Abstract
:1. Introduction
1.1. Summary of Contributions
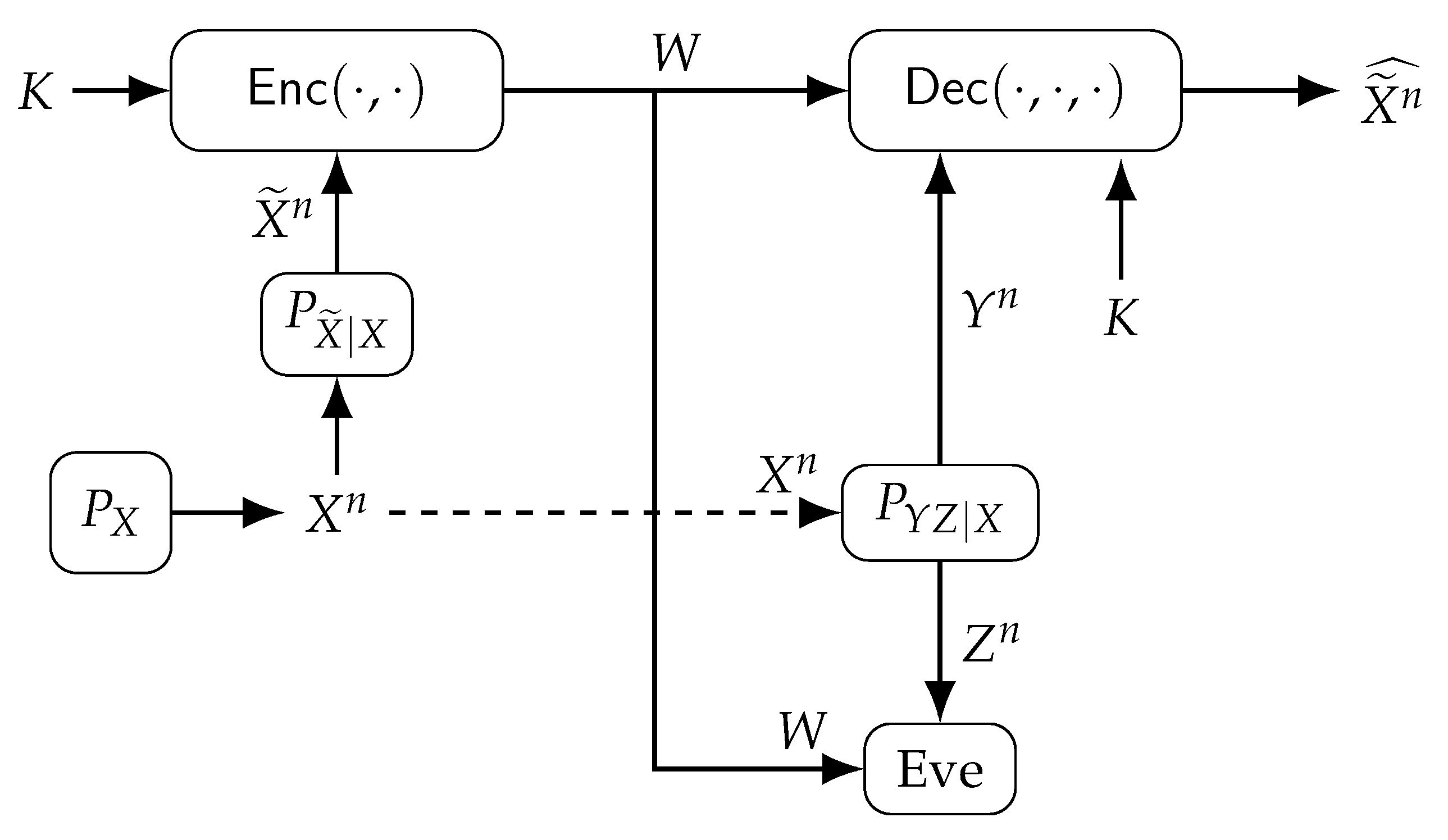
- We characterize the lossy secure and private source coding region when noisy measurements of a remote source are observed by all terminals, and there is one private key available.
- Requiring reliable source reconstruction, we also characterize the rate region for the lossless secure and private source coding problem.
- A Gaussian remote source and independent additive Gaussian noise measurement channels are considered to establish their lossy rate region under squared error distortion.
- We provide an achievable lossy secure and private source coding region for a binary remote source and its measurements through additive Gaussian noise channels, which includes computable differential entropy terms.
1.2. Organization
1.3. Notation
2. System Model
3. Secure and Private Source Coding Regions
3.1. Lossy Source Coding
3.2. Lossless Source Coding
4. Gaussian Sources and Additive Gaussian Noise Channels
5. Multiple Binary-input Additive Gaussian Noise Channels
6. Proof for Theorem 1
6.1. Achievability Proof for Theorem 1
6.2. Converse Proof for Theorem 1
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Slepian, D.; Wolf, J. Noiseless coding of correlated information sources. IEEE Trans. Inf. Theory 1973, 19, 471–480. [Google Scholar] [CrossRef]
- Gamal, A.E.; Kim, Y.H. Network Information Theory; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Orlitsky, A.; Roche, J.R. Coding for computing. IEEE Trans. Inf. Theory 2001, 47, 903–917. [Google Scholar] [CrossRef]
- Günlü, O. Function computation under privacy, secrecy, distortion, and communication constraints. Entropy 2022, 24, 110. [Google Scholar] [CrossRef] [PubMed]
- Prabhakaran, V.; Ramchandran, K. On secure distributed source coding. In Proceedings of the 2007 IEEE Information Theory Workshop, Solstrand, Norway, 1–6 July 2007; pp. 442–447. [Google Scholar]
- Gündüz, D.; Erkip, E.; Poor, H.V. Secure lossless compression with side information. In Proceedings of the 2008 IEEE Information Theory Workshop, Porto, Portugal, 5–9 May 2008; pp. 169–173. [Google Scholar]
- Tandon, R.; Ulukus, S.; Ramchandran, K. Secure source coding with a helper. IEEE Trans. Inf. Theory 2013, 59, 2178–2187. [Google Scholar] [CrossRef] [Green Version]
- Gündüz, D.; Erkip, E.; Poor, H.V. Lossless compression with security constraints. In Proceedings of the 2008 IEEE Information Theory Workshop, Porto, Portugal, 5–9 May 2008; pp. 111–115. [Google Scholar]
- Luh, W.; Kundur, D. Distributed secret sharing for discrete memoryless networks. IEEE Trans. Inf. Forensics Secur. 2008, 3, 1–7. [Google Scholar] [CrossRef]
- Kittichokechai, K.; Chia, Y.K.; Oechtering, T.J.; Skoglund, M.; Weissman, T. Secure source coding with a public helper. IEEE Trans. Inf. Theory 2016, 62, 3930–3949. [Google Scholar] [CrossRef] [Green Version]
- Salimi, S.; Salmasizadeh, M.; Aref, M.R. Generalised secure distributed source coding with side information. IET Commun. 2010, 4, 2262–2272. [Google Scholar] [CrossRef]
- Naghibi, F.; Salimi, S.; Skoglund, M. The CEO problem with secrecy constraints. IEEE Trans. Inf. Forensics Secur. 2015, 10, 1234–1249. [Google Scholar] [CrossRef] [Green Version]
- Yamamoto, H. Coding theorems for Shannon’s cipher system with correlated source outputs, and common information. IEEE Trans. Inf. Theory 1994, 40, 85–95. [Google Scholar] [CrossRef]
- Ghourchian, H.; Stavrou, P.A.; Oechtering, T.J.; Skoglund, M. Secure source coding with side-information at decoder and shared key at encoder and decoder. In Proceedings of the 2021 IEEE Information Theory Workshop (ITW) 2021, Virtual. 17–21 October 2021; pp. 1–6. [Google Scholar]
- Maurer, U.M. Secret key agreement by public discussion from common information. IEEE Trans. Inf. Theory 1993, 39, 2733–2742. [Google Scholar] [CrossRef]
- Ahlswede, R.; Csiszár, I. Common randomness in information theory and cryptography—Part I: Secret sharing. IEEE Trans. Inf. Theory 1993, 39, 1121–1132. [Google Scholar] [CrossRef]
- Yao, A.C. Protocols for secure computations. In Proceedings of the 3rd Annual Symposium on Foundations of Computer Science (SFCS 1982), Chicago, IL, USA, 3–5 November 1982; pp. 160–164. [Google Scholar]
- Yao, A.C. How to generate and exchange secrets. In Proceedings of the 3rd Annual Symposium on Foundations of Computer Science (SFCS 1982), Chicago, IL, USA, 3–5 November 1982; pp. 162–167. [Google Scholar]
- Bloch, M.; Günlü, O.; Yener, A.; Oggier, F.; Poor, H.V.; Sankar, L.; Schaefer, R.F. An overview of information-theoretic security and privacy: Metrics, limits and applications. IEEE J. Sel. Areas Inf. Theory 2021, 2, 5–22. [Google Scholar] [CrossRef]
- Günlü, O.; Kramer, G. Privacy, secrecy, and storage with multiple noisy measurements of identifiers. IEEE Trans. Inf. Forensics Secur. 2018, 13, 2872–2883. [Google Scholar] [CrossRef] [Green Version]
- Günlü, O.; Bloch, M.; Schaefer, R.F. Secure multi-function computation with private remote sources. arXiv 2021, arXiv:2106.09485. [Google Scholar]
- Berger, T. Rate Distortion Theory: A Mathematical Basis for Data Compression; Prentice-Hall: Englewood Cliffs, NJ, USA, 1971. [Google Scholar]
- Permuter, H.; Weissman, T. Source coding with a side information “Vending Machine”. IEEE Trans. Inf. Theory 2011, 57, 4530–4544. [Google Scholar] [CrossRef] [Green Version]
- Berger, T.; Zhang, Z.; Viswanathan, H. The CEO problem. IEEE Trans. Inf. Theory 1996, 42, 887–902. [Google Scholar] [CrossRef]
- Günlü, O. Key Agreement with Physical Unclonable Functions and Biometric Identifiers. Ph.D. Thesis, Technical University of Munich, Munich, Germany, February 2019. [Google Scholar]
- Ignatenko, T.; Willems, F.M.J. Biometric systems: Privacy and secrecy aspects. IEEE Trans. Inf. Forensics Secur. 2009, 4, 956–973. [Google Scholar] [CrossRef] [Green Version]
- Lai, L.; Ho, S.W.; Poor, H.V. Privacy-security trade-offs in biometric security systems - Part I: Single use case. IEEE Trans. Inf. Forensics Secur. 2011, 6, 122–139. [Google Scholar] [CrossRef]
- Kusters, L.; Günlü, O.; Willems, F.M. Zero secrecy leakage for multiple enrollments of physical unclonable functions. In Proceedings of the 2018 Symposium on Information Theory and Signal Processing in the Benelux, Enschede, The Netherlands, 31 May–1 June 2018; pp. 119–127. [Google Scholar]
- Lai, L.; Ho, S.W.; Poor, H.V. Privacy-security trade-offs in biometric security systems—Part II: Multiple use case. IEEE Trans. Inf. Forensics Secur. 2011, 6, 140–151. [Google Scholar] [CrossRef]
- Günlü, O. Multi-Entity and Multi-Enrollment Key Agreement with Correlated Noise. IEEE Trans. Inf. Forensics Secur. 2021, 16, 1190–1202. [Google Scholar] [CrossRef]
- Günlü, O.; Schaefer, R.F.; Boche, H.; Poor, H.V. Secure and private source coding with private key and decoder side information. arXiv 2022, arXiv:2205.05068. [Google Scholar]
- Tu, W.; Lai, L. On function computation with privacy and secrecy constraints. IEEE Trans. Inf. Theory 2019, 65, 6716–6733. [Google Scholar] [CrossRef]
- Villard, J.; Piantanida, P. Secure multiterminal source coding with side information at the eavesdropper. IEEE Trans. Inf. Theory 2013, 59, 3668–3692. [Google Scholar] [CrossRef] [Green Version]
- Bross, S.I. Secure cooperative source-coding with side information at the eavesdropper. IEEE Trans. Inf. Theory 2016, 62, 4544–4558. [Google Scholar] [CrossRef]
- Ekrem, E.; Ulukus, S. Secure lossy source coding with side information. In Proceedings of the 2011 49th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 28–30 September 2011; pp. 1098–1105. [Google Scholar]
- Körner, J.; Marton, K. Comparison of two noisy channels. Topics Inf. Theory 1977, 411–423. [Google Scholar]
- Bergmans, P. A simple converse for broadcast channels with additive white Gaussian noise (Corresp.). IEEE Trans. Inf. Theory 1974, 20, 279–280. [Google Scholar] [CrossRef]
- Günlü, O.; Schaefer, R.F.; Poor, H.V. Biometric and Physical Identifiers with Correlated Noise for Controllable Private Authentication. arXiv 2020, arXiv:2001.00847. [Google Scholar]
- Wyner, A.D.; Ziv, J. A theorem on the entropy of certain binary sequences and applications: Part I. IEEE Trans. Inf. Theory 1973, 19, 769–772. [Google Scholar] [CrossRef]
- Watanabe, S.; Oohama, Y. Secret key agreement from correlated Gaussian sources by rate limited public communication. IEICE Trans. Fundam. Electron., Commun. Comp. Sci. 2010, 93, 1976–1983. [Google Scholar] [CrossRef] [Green Version]
- Willems, F.M.; Ignatenko, T. Quantization effects in biometric systems. In Proceedings of the 2009 Information Theory and Applications Workshop, San Diego, CA, USA, 27 January–1 February 2009; pp. 372–379. [Google Scholar]
- Yachongka, V.; Yagi, H.; Oohama, Y. Secret key-based authentication with passive eavesdropper for scalar Gaussian sources. arXiv 2022, arXiv:2202.10018. [Google Scholar]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory, 2nd ed.; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Maes, R. An accurate probabilistic reliability model for silicon PUFs. In International Conference on Cryptographic Hardware and Embedded Systems; Springer: Berlin/Heidelberg, Germany, 2013; pp. 73–89. [Google Scholar]
- Anantharam, V. Lecture Notes in Stochastic Estimation and Control: Jointly Gaussian Random Variables; University California Berkeley: Berkeley, CA, USA, 2007. [Google Scholar]
- Wyner, A.; Ziv, J. The rate-distortion function for source coding with side information at the decoder. IEEE Trans. Inf. Theory 1976, 22, 1–10. [Google Scholar] [CrossRef]
- Chayat, N.; Shamai, S. Extension of an entropy property for binary input memoryless symmetric channels. IEEE Trans. Inf. Theory 1989, 35, 1077–1079. [Google Scholar] [CrossRef]
- Günlü, O.; Kramer, G.; Skórski, M. Privacy and secrecy with multiple measurements of physical and biometric identifiers. In Proceedings of the 2015 IEEE Conference on Communications and Network Security (CNS), Florence, Italy, 28–30 September 2015; pp. 89–94. [Google Scholar]
- Yassaee, M.H.; Aref, M.R.; Gohari, A. Achievability proof via output statistics of random binning. IEEE Trans. Inf. Theory 2014, 60, 6760–6786. [Google Scholar] [CrossRef] [Green Version]
- Renes, J.M.; Renner, R. Noisy channel coding via privacy amplification and information reconciliation. IEEE Trans. Inf. Theory 2011, 57, 7377–7385. [Google Scholar] [CrossRef] [Green Version]
- Bloch, M. Lecture Notes in Information-Theoretic Security; Georgia Institute of Technology: Atlanta, GA, USA, 2018. [Google Scholar]
- Holenstein, T.; Renner, R. On the randomness of independent experiments. IEEE Trans. Inf. Theory 2011, 57, 1865–1871. [Google Scholar] [CrossRef]
- Bloch, M.; Barros, J. Physical-Layer Security; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]
- Csiszár, I.; Körner, J. Information Theory: Coding Theorems for Discrete Memoryless Systems, 2nd ed.; Cambridge University Press: Cambridge, UK, 2011. [Google Scholar]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Günlü, O.; Schaefer, R.F.; Boche, H.; Poor, H.V. Private Key and Decoder Side Information for Secure and Private Source Coding. Entropy 2022, 24, 1716. https://doi.org/10.3390/e24121716
Günlü O, Schaefer RF, Boche H, Poor HV. Private Key and Decoder Side Information for Secure and Private Source Coding. Entropy. 2022; 24(12):1716. https://doi.org/10.3390/e24121716
Chicago/Turabian StyleGünlü, Onur, Rafael F. Schaefer, Holger Boche, and Harold Vincent Poor. 2022. "Private Key and Decoder Side Information for Secure and Private Source Coding" Entropy 24, no. 12: 1716. https://doi.org/10.3390/e24121716