
Event-Triggered Fixed-Time Integral Sliding Mode Control for Nonlinear Multi-Agent Systems with Disturbances



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- In existing works [27,28], the disturbance rejection method was applied to study the fixed-time consensus of MASs with external disturbances. However, the integral SMC method combination with event-triggered control mechanism are introduced to design the distributed protocol in this paper, which can effectively suppress the disturbances and achieve consensus in fixed-time.
- In [35,36], the finite-time event-triggered integral SMC protocols were proposed, in which the estimation of settling time was associated with the initial conditions. To overcome this disadvantage, the fixed-time event-triggered integral SMC protocols are proposed in this paper. According to the stability theory of fixed-time, we can prove that the consensus can be reached in fixed-time and the upper bound estimation of settling time is regardless of the initial conditions of MASs.
- The containment control for FONMASs with multiple leaders is also considered, in which a generalized event-triggered integral SMC protocol is designed and the controller is updated only at some discrete instants. The sliding surface and the containment control can be reached in fixed-time. The Zeno phenomenon can be avoided.
2. Preliminaries
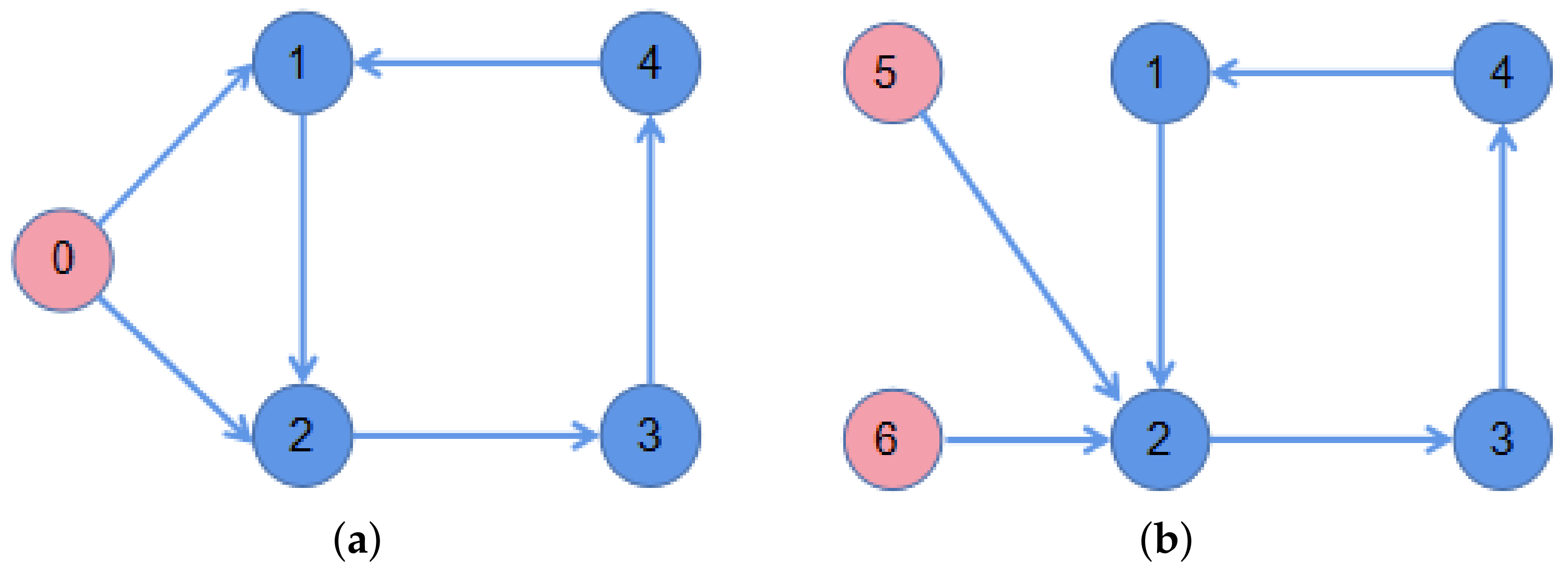
2.1. Algebraic Graph Theory
2.2. Definitions and Lemmas
2.3. Problem Formulation
3. Main Results
3.1. Fixed-Time Consensus with Single Leader
3.2. Fixed-Time Containment Control with Multiple Leaders
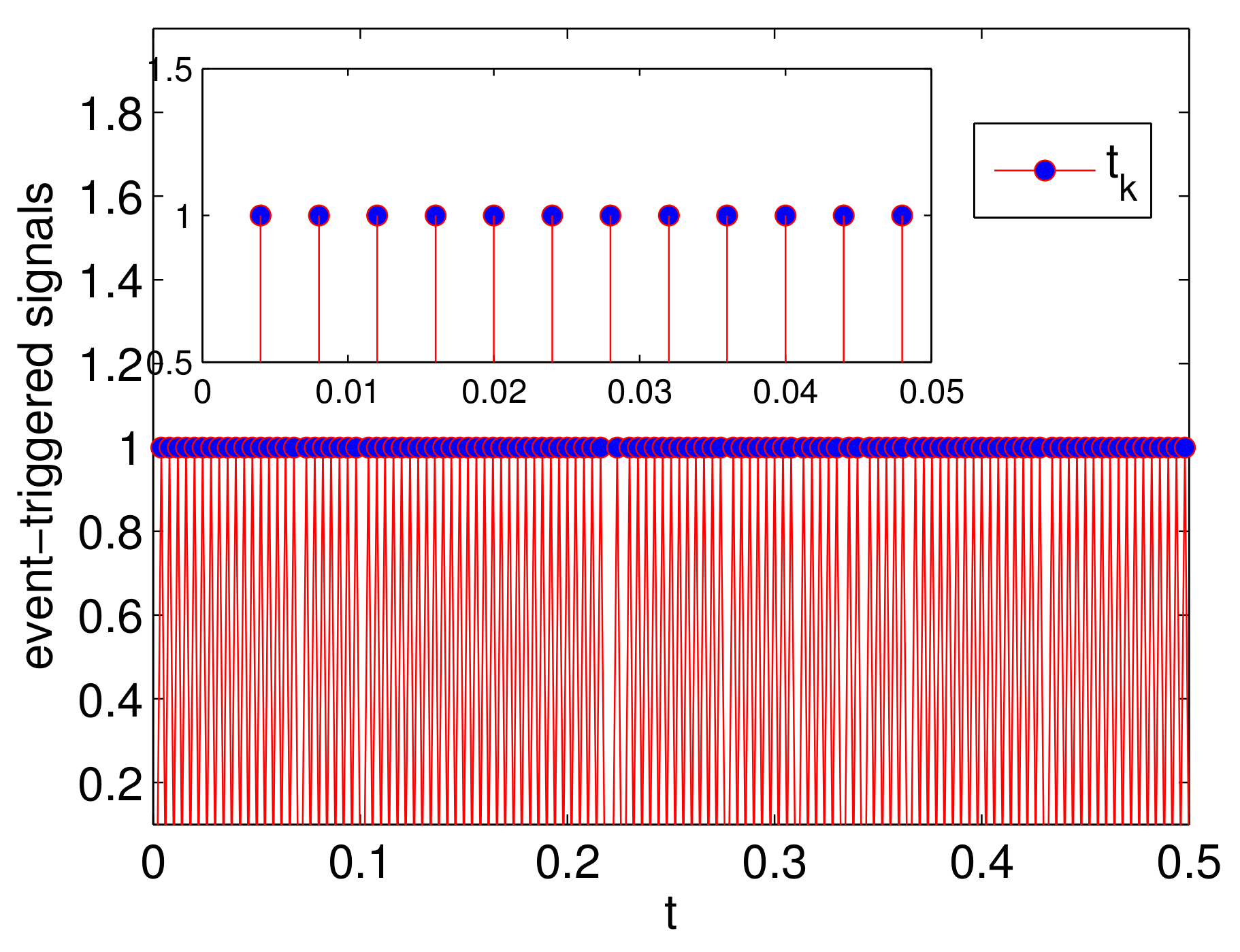
4. Numerical Example
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| MASs | Multi-agent systems |
| FONMASs | First-order nonlinear multi-agent systems |
| SMC | Sliding mode control |
References
- Wang, Z.; Wang, L.; Zhang, H.; Chen, Q.; Liu, J. Distributed regular polygon formation control and obstacle avoidance for non-holonomic wheeled mobile robots with directed communication topology. IET Control. Theory Appl. 2020, 14, 1113–1122. [Google Scholar] [CrossRef]
- Halakarnimath, B.; Sutagundar, A. Multi-agent-based acoustic sensor node deployment in underwater acoustic wireless sensor networks. J. Inf. Technol. Res. 2020, 13, 136–155. [Google Scholar] [CrossRef]
- Rezaee, H.; Abdollahi, F. Robust attitude alignment in multispacecraft systems with stochastic links failure. Automatica 2020, 118, 109033. [Google Scholar] [CrossRef]
- Angeli, D.; Bliman, P. Stability of leaderless discrete-time multi-agent systems. Math. Control Signals Syst. 2006, 18, 293–322. [Google Scholar] [CrossRef]
- Ren, W. Distributed leaderless consensus algorithms for networked Euler-Lagrange systems. Int. J. Control 2009, 82, 2137–2149. [Google Scholar] [CrossRef]
- Bai, J.; Wen, G.; Rahmani, A. Leaderless consensus for the fractional-order nonlinear multi-agent systems under directed interaction topology. Int. J. Syst. Sci. 2018, 49, 954–963. [Google Scholar] [CrossRef]
- Wen, G.; Wang, H.; Yu, X.; Yu, W. Bipartite tracking consensus of linear multi-agent systems with a dynamic leader. IEEE Trans. Circuits Syst. II Express Briefs 2017, 65, 1204–1208. [Google Scholar] [CrossRef]
- Wen, G.; Duan, Z.; Li, Z.; Chen, G. Consensus tracking of nonlinear multi-agent systems with switching directed topologies. In Proceedings of the International Conference on Control Automation, Guangzhou, China, 5–7 December 2012; pp. 889–894. [Google Scholar]
- He, W.; Chen, G.; Han, Q.; Qian, F. Network-based leader-following consensus of nonlinear multi-agent systems via distributed impulsive control. Inf. Sci. 2017, 380, 145–158. [Google Scholar]
- Fu, Q. Iterative learning control for nonlinear heterogeneous multi-agent systems with multiple leaders. Trans. Inst. Meas. Control. 2020, 43, 854–861. [Google Scholar]
- Hu, J.; Bhowmick, P.; Lanzon, A. Distributed adaptive time-varying group formation tracking for multiagent systems with multiple leaders on directed graphs. IEEE Trans. Control Netw. Syst. 2020, 7, 140–150. [Google Scholar]
- Zou, W.; Shi, P.; Xiang, Z.; Shi, Y. Finite-time consensus of second-order switched nonlinear multi-agent systems. IEEE Trans. Neural Netw. Learn. Syst. 2020, 31, 1757–1762. [Google Scholar] [CrossRef]
- Zhao, Y.; Duan, Z.; Wen, G.; Zhang, Y. Distributed finite-time tracking control for multi-agent systems: An observer-based approach. Syst. Control Lett. 2013, 62, 22–28. [Google Scholar] [CrossRef]
- Li, W.; Sun, S.; Xia, C. Finite-time stability of multi-agent system in disturbed environment. Nonlinear Dyn. 2012, 67, 2009–2016. [Google Scholar]
- Xu, Z.; Liu, H.; Liu, Y. Fixed-time leader-following flocking for nonlinear second-order multi-agent systems. IEEE Access 2020, 8, 86262–86271. [Google Scholar] [CrossRef]
- Zou, W.; Qian, K.; Xiang, Z. Fixed-time consensus for a class of heterogeneous nonlinear multiagent systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 67, 1279–1283. [Google Scholar] [CrossRef]
- Sun, F.; Liu, P.; Li, H.; Zhu, W. Fixed-time consensus of heterogeneous multi-agent systems based on distributed observer. Int. J. Syst. Sci. 2021, 52, 1780–1789. [Google Scholar] [CrossRef]
- Manivannan, R.; Samidurai, R.; Cao, J.; Perc, M. Design of resilient reliable dissipativity control for systems with actuator faults and probabilistic time-delay signals via sampled-data approach. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 4243–4255. [Google Scholar] [CrossRef]
- Dimarogonas, D.; Frazzoli, E.; Johansson, K. Distributed event-triggered control for multi-agent systems. IEEE Trans. Autom. Control 2012, 57, 1291–1297. [Google Scholar] [CrossRef]
- Zhang, H.; Feng, G.; Yan, H.; Chen, Q. Observer-based output feedback event-triggered control for consensus of multi-agent systems. IEEE Trans. Ind. Electron. 2014, 61, 4885–4894. [Google Scholar] [CrossRef]
- Zou, W.; Xiang, Z. Event-triggered containment control of second-order nonlinear multi-agent systems. J. Frankl. Inst. 2019, 356, 10421–10438. [Google Scholar] [CrossRef]
- Yang, Z.; Zheng, S.; Liang, B.; Xie, Y. Event-triggered finite-time consensus for stochastic multi-agent systems. Trans. Inst. Meas. Control 2020, 43, 782–791. [Google Scholar] [CrossRef]
- Liu, L.; Perc, M.; Cao, J. Aperiodically intermittent stochastic stabilization via discrete time or delay feedback control. Sci. China Inf. Sci. 2019, 62, 072201. [Google Scholar] [CrossRef] [Green Version]
- Wei, Q.; Wang, X.; Zhong, X.; Wu, N. Consensus control of leader-following multi-agent systems in directed topology with heterogeneous disturbances. IEEE/CAA J. Autom. Sin. 2021, 8, 423–431. [Google Scholar] [CrossRef]
- Wang, X.; Wang, G. Distributed finite-time optimisation algorithm for second-order multi-agent systems subject to mismatched disturbances. IET Control. Theory Appl. 2020, 14, 2977–2988. [Google Scholar] [CrossRef]
- Sun, J.; Yang, J.; Li, S.; Wang, X.; Li, G. Event-triggered output consensus disturbance rejection algorithm for multi-agent systems with time-varying disturbances. J. Frankl. Inst. 2020, 357, 12870–12885. [Google Scholar] [CrossRef]
- Liu, J.; Yu, Y.; Sun, J.; Sun, C. Distributed event-triggered fixed-time consensus for leader-follower multiagent systems with nonlinear dynamics and uncertain disturbances. Int. J. Robust Nonlinear Control 2018, 28, 3543–3559. [Google Scholar] [CrossRef]
- Zhou, D.; Zhang, A.; Yang, P. Fixed-time event-triggered consensus of second-order multi-agent systems with fully continuous communication free. IET Control Theory Appl. 2020, 14, 2385–2394. [Google Scholar] [CrossRef]
- Bai, J.; Wen, G.; Rahmani, A.; Yu, Y. Consensus for the fractional-order double-integrator multi-agent systems based on the sliding mode estimator. IET Control Theory Appl. 2018, 12, 621–628. [Google Scholar] [CrossRef]
- Wang, Q.; Sun, C.; Chat, X.; Yao, Y. Disturbance observer-based sliding mode control for multi-agent systems with mismatched uncertainties. Assem. Autom. 2018, 38, 606–614. [Google Scholar] [CrossRef]
- Yu, Z.; Yu, S.; Jiang, H.; Hu, C. Distributed consensus for multi-agent systems via adaptive sliding mode control. Int. J. Robust Nonlinear Control 2021, 31, 7125–7151. [Google Scholar] [CrossRef]
- Park, D.; Moon, J.; Han, S. Finite-time sliding mode controller design for formation control of multi-agent mobile robots. J. Korea Robot. Soc. 2017, 12, 339–349. [Google Scholar] [CrossRef]
- Wang, C.; Wen, G.; Peng, Z.; Zhang, X. Integral sliding-mode fixed-time consensus tracking for second-order non-linear and time delay multi-agent systems. J. Frankl. Inst. 2019, 35, 3692–3710. [Google Scholar] [CrossRef]
- Wang, J.; Xu, Y.; Xu, Y.; Yang, D. Time-varying formation for high-order multi-agent systems with external disturbances by event-triggered integral sliding mode control. Appl. Math. Comput. 2019, 359, 333–343. [Google Scholar] [CrossRef]
- Nair, R.; Behera, L.; Kumar, S. Event-triggered finite-time integral sliding mode controller for consensus-based formation of multirobot systems with disturbances. IEEE Trans. Control Syst. Technol. 2017, 27, 39–47. [Google Scholar] [CrossRef]
- Wang, J.; Zhang, Y.; Li, X.; Zhao, Y. Finite-time consensus for nonholonomic multi-agent systems with disturbances via event-triggered integral sliding mode controller. J. Frankl. Inst. 2020, 357, 7779–7795. [Google Scholar] [CrossRef]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Yu, Z.; Yu, S.; Jiang, H.; Mei, X. Distributed fixed-time optimization for multiagent systems over a directed network. Nonlinear Dyn. 2021, 103, 775–789. [Google Scholar] [CrossRef]







Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Yu, Z.; Jiang, H. Event-Triggered Fixed-Time Integral Sliding Mode Control for Nonlinear Multi-Agent Systems with Disturbances. Entropy 2021, 23, 1412. https://doi.org/10.3390/e23111412
Li X, Yu Z, Jiang H. Event-Triggered Fixed-Time Integral Sliding Mode Control for Nonlinear Multi-Agent Systems with Disturbances. Entropy. 2021; 23(11):1412. https://doi.org/10.3390/e23111412
Chicago/Turabian StyleLi, Xue, Zhiyong Yu, and Haijun Jiang. 2021. "Event-Triggered Fixed-Time Integral Sliding Mode Control for Nonlinear Multi-Agent Systems with Disturbances" Entropy 23, no. 11: 1412. https://doi.org/10.3390/e23111412