
Frequency Response of RC Propellers to Streamwise Gusts in Forward Flight

Abstract
:1. Introduction and Background
1.1. Gust Types and Unsteady Wind Tunnels
1.2. Propeller Performance in Unsteady Flows
2. Experimental Setup
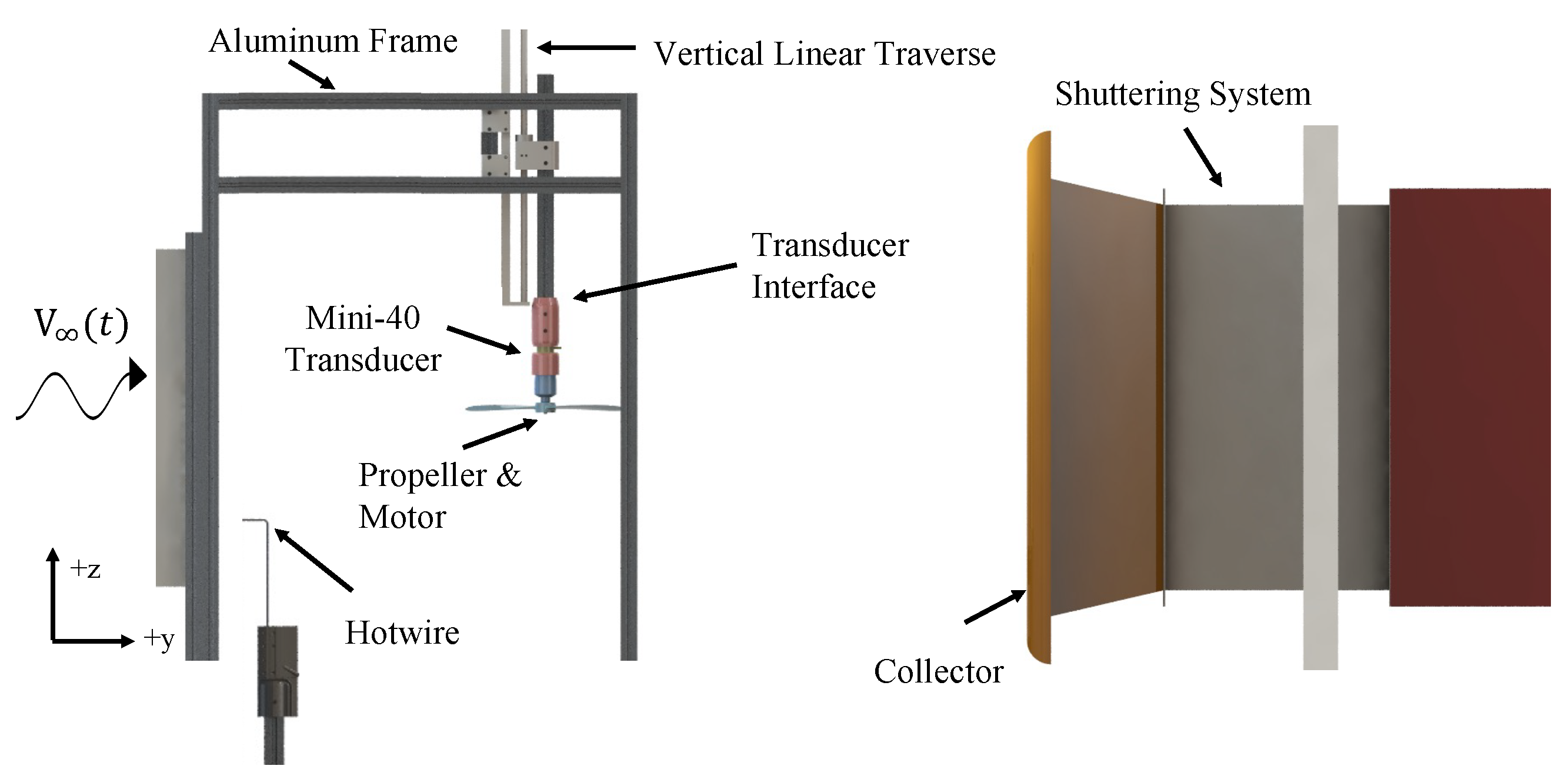
2.1. Propeller Test Setup
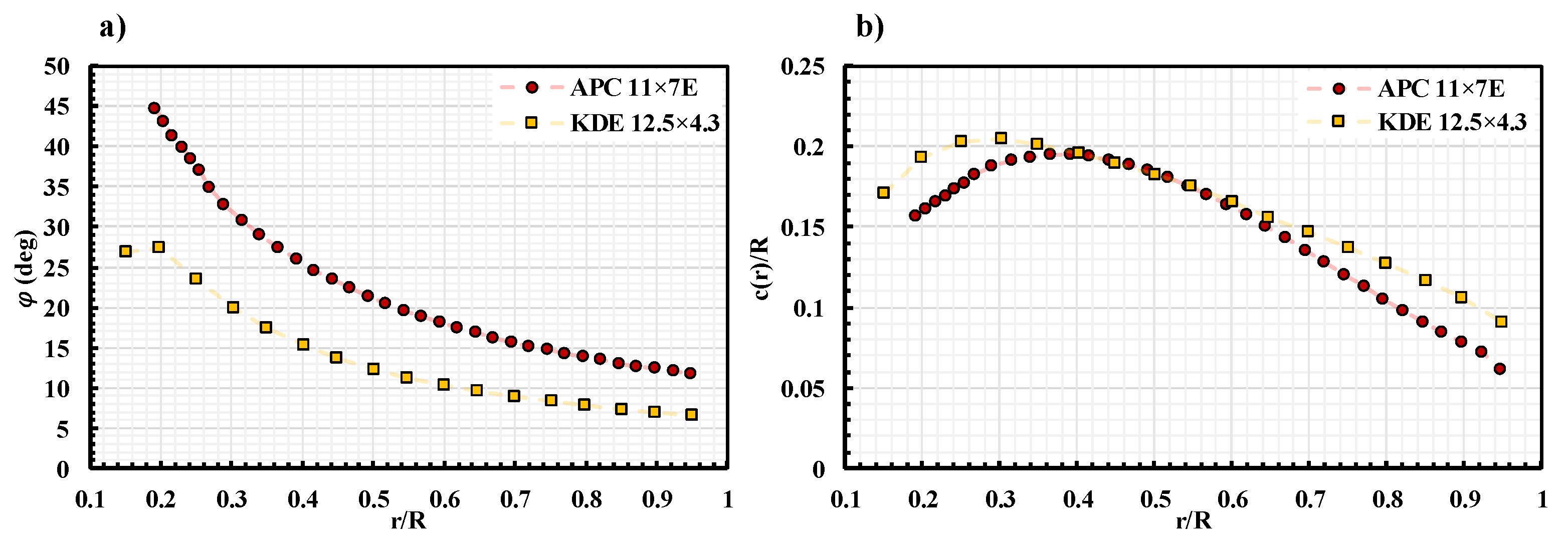
2.2. Propeller Geometry
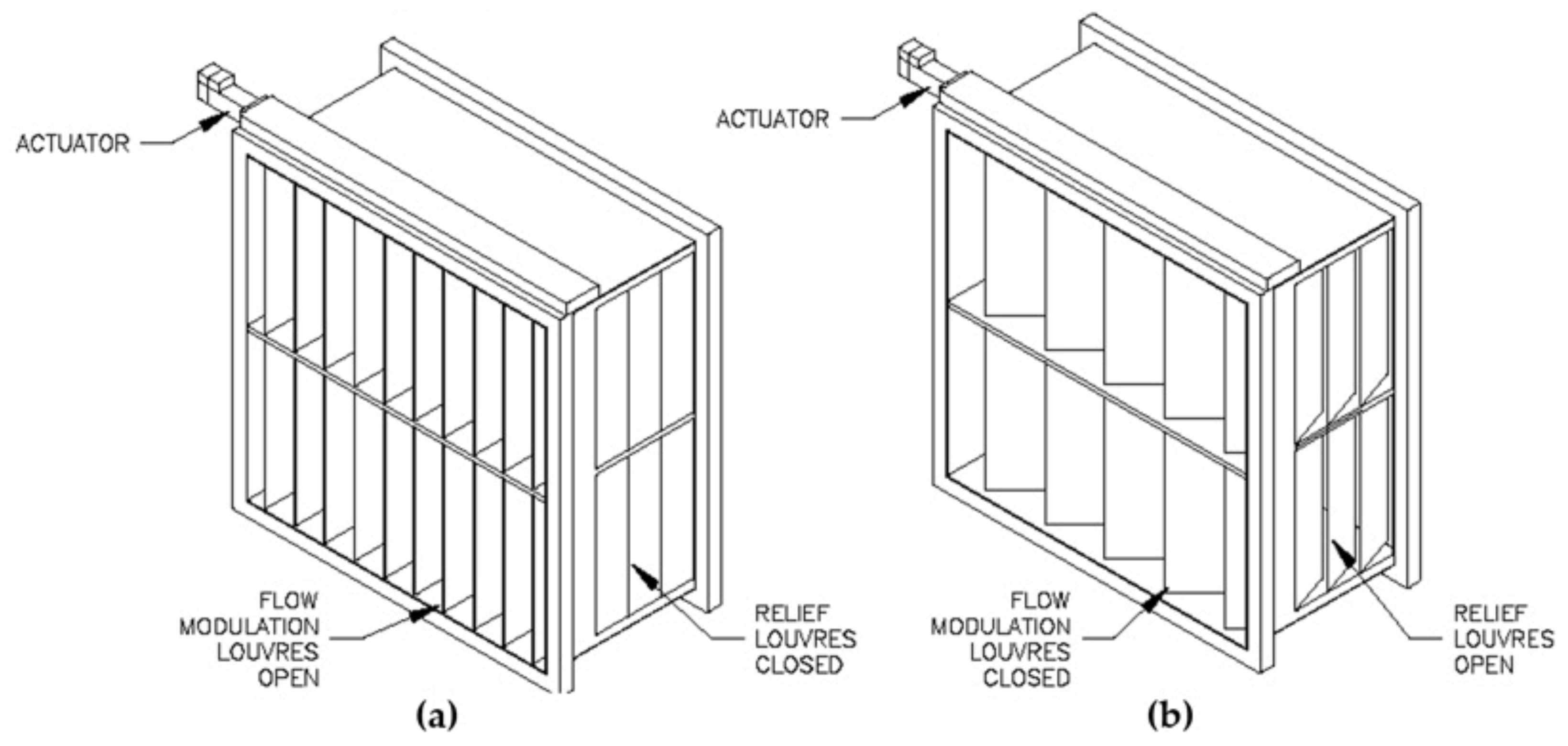
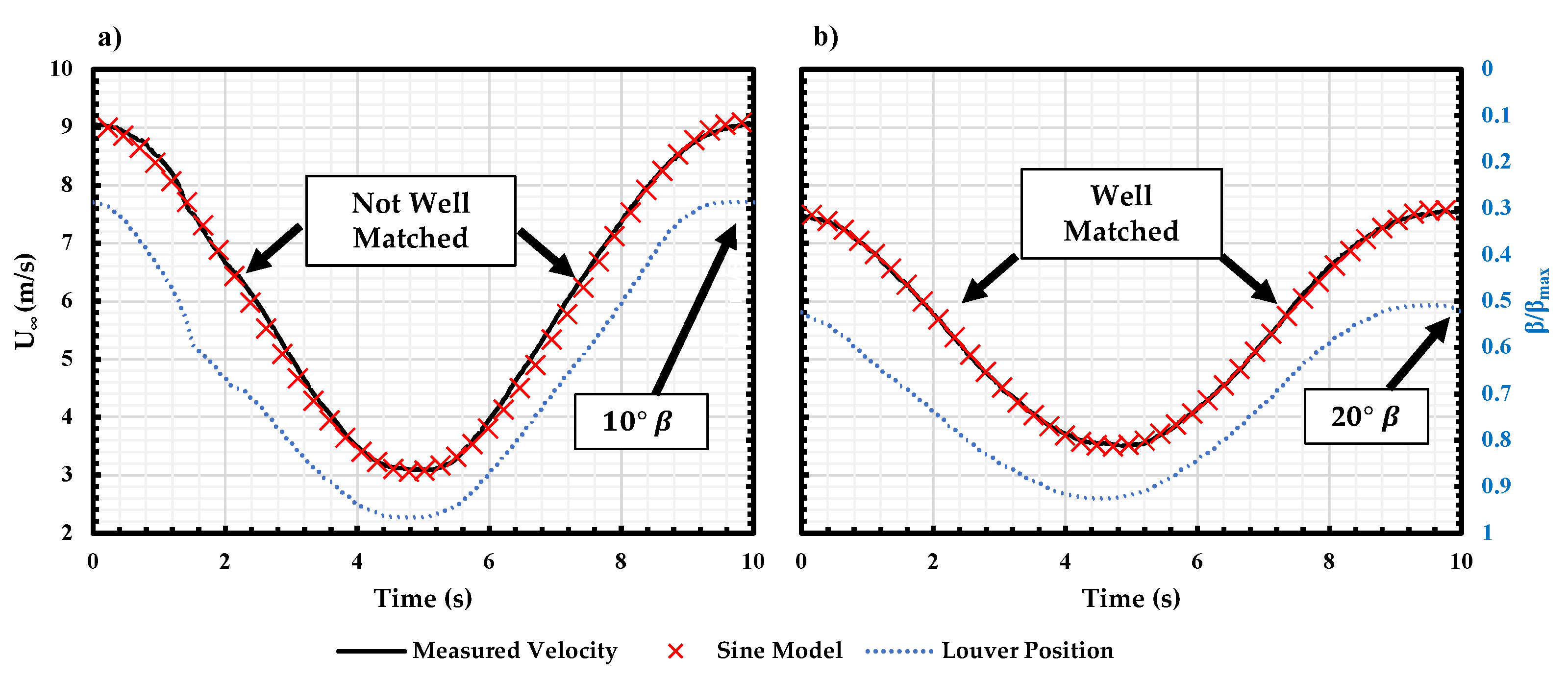
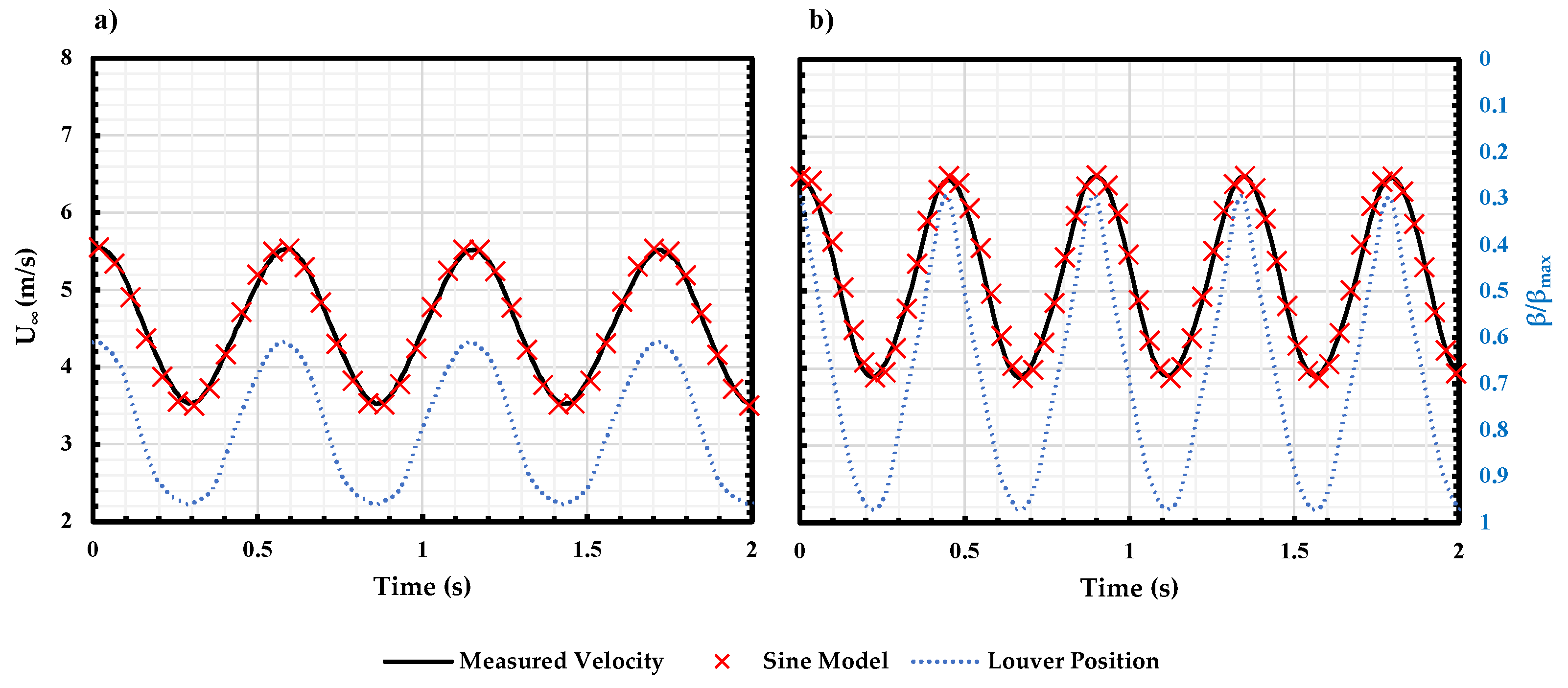
2.3. Shuttering System
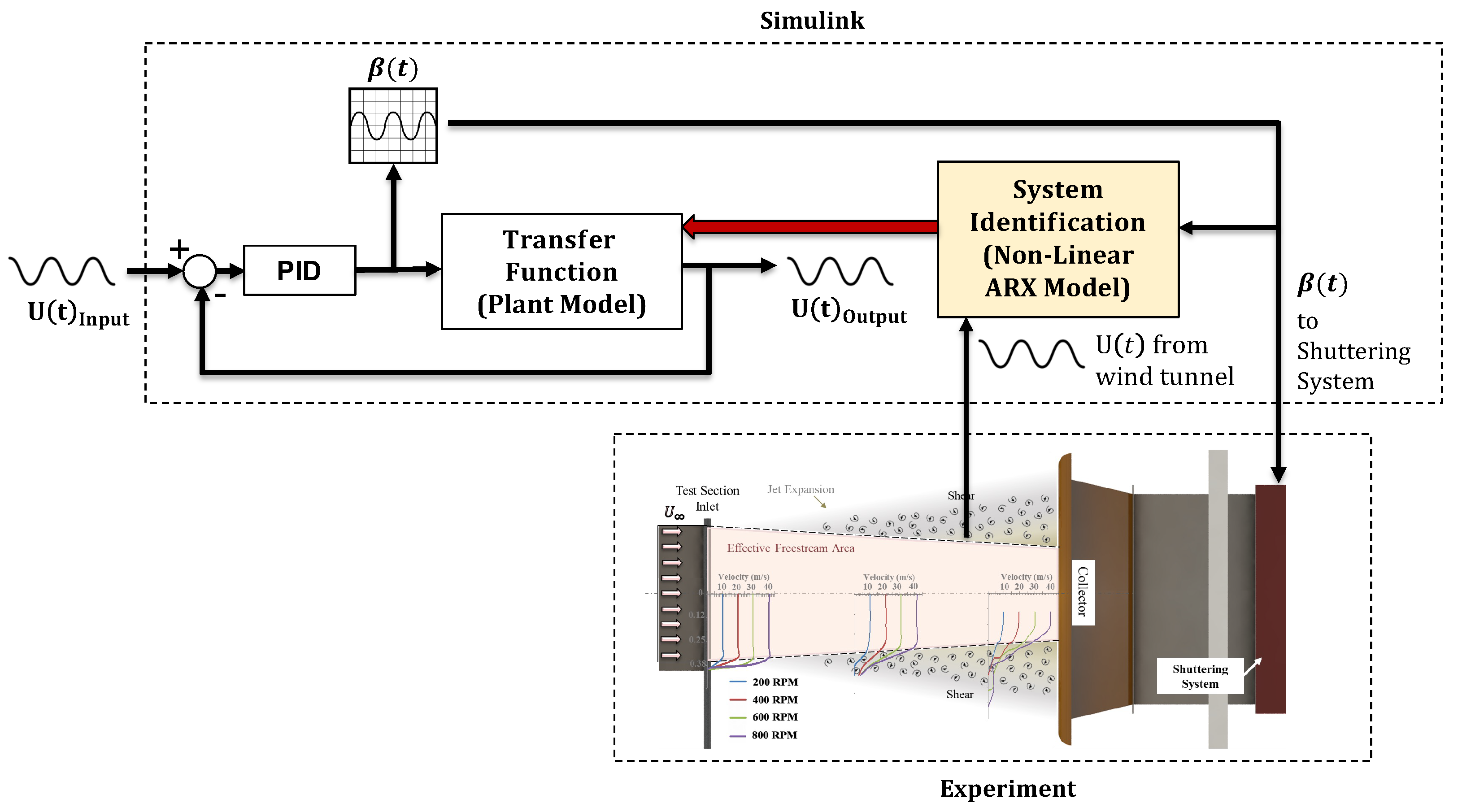
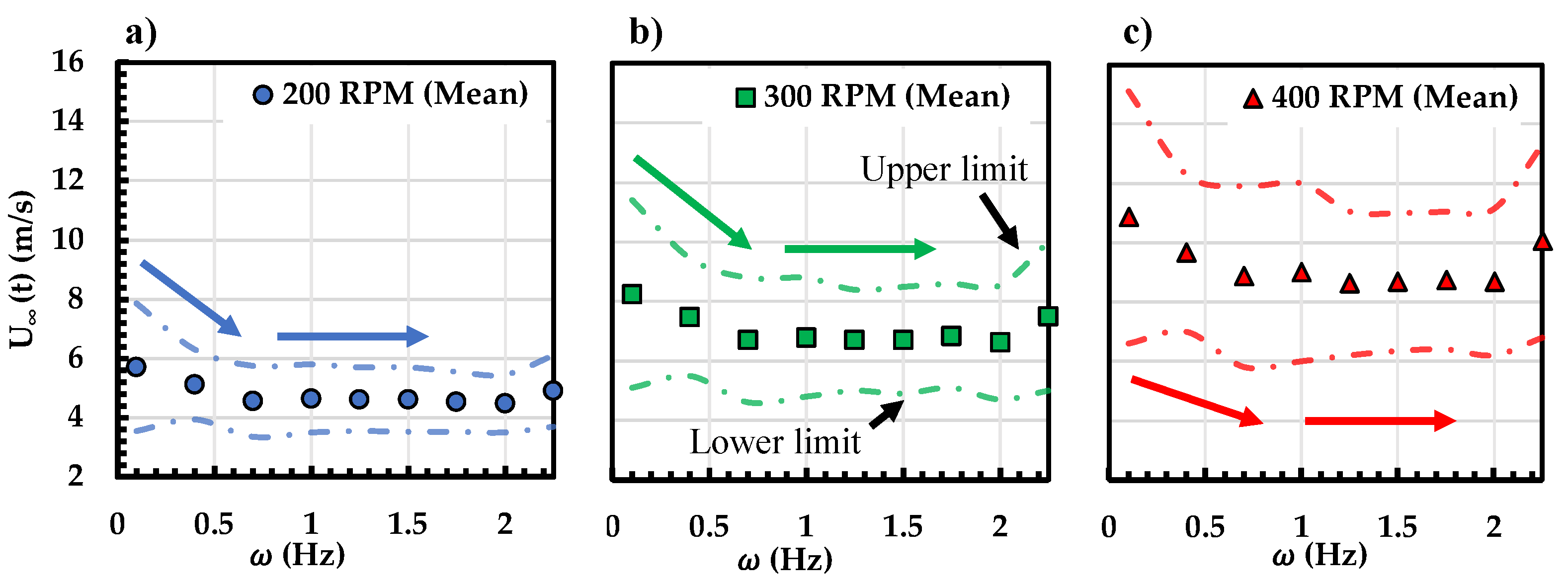
3. Shuttering System Characterization
4. Results
4.1. Propeller Performance in Steady Freestream
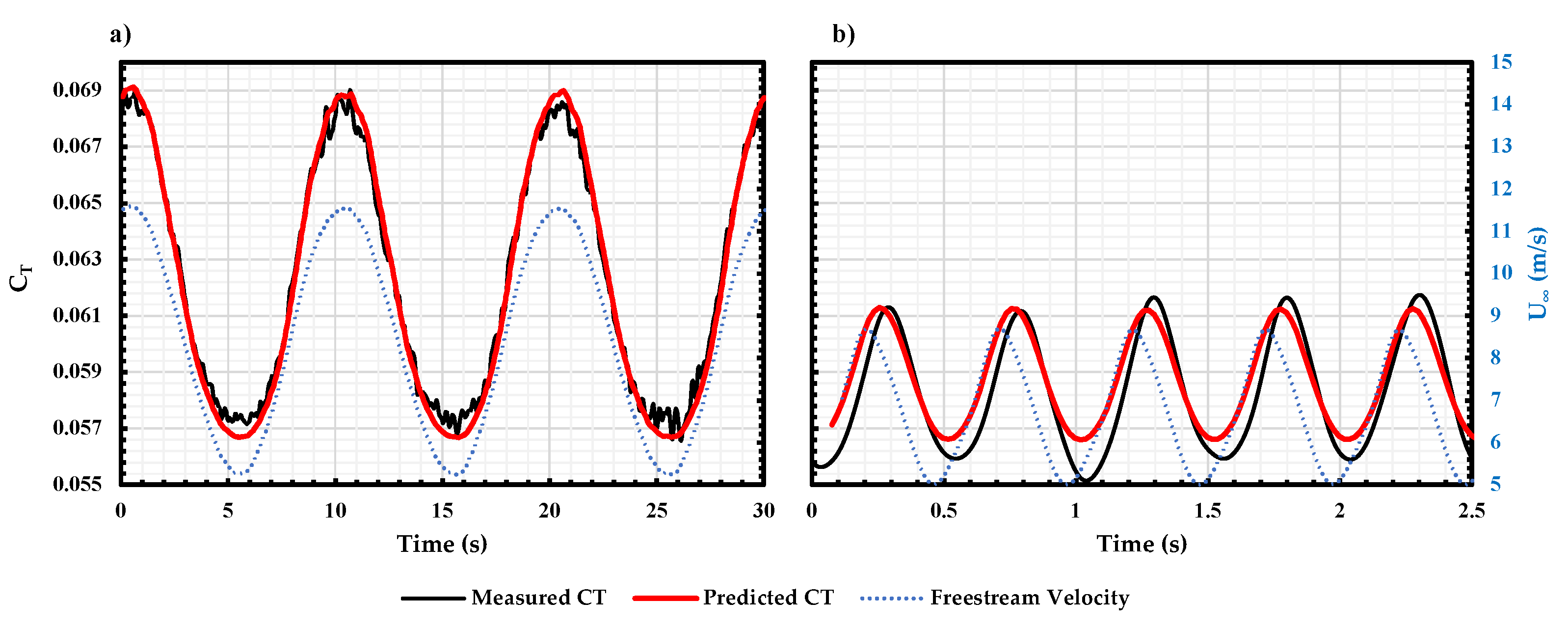
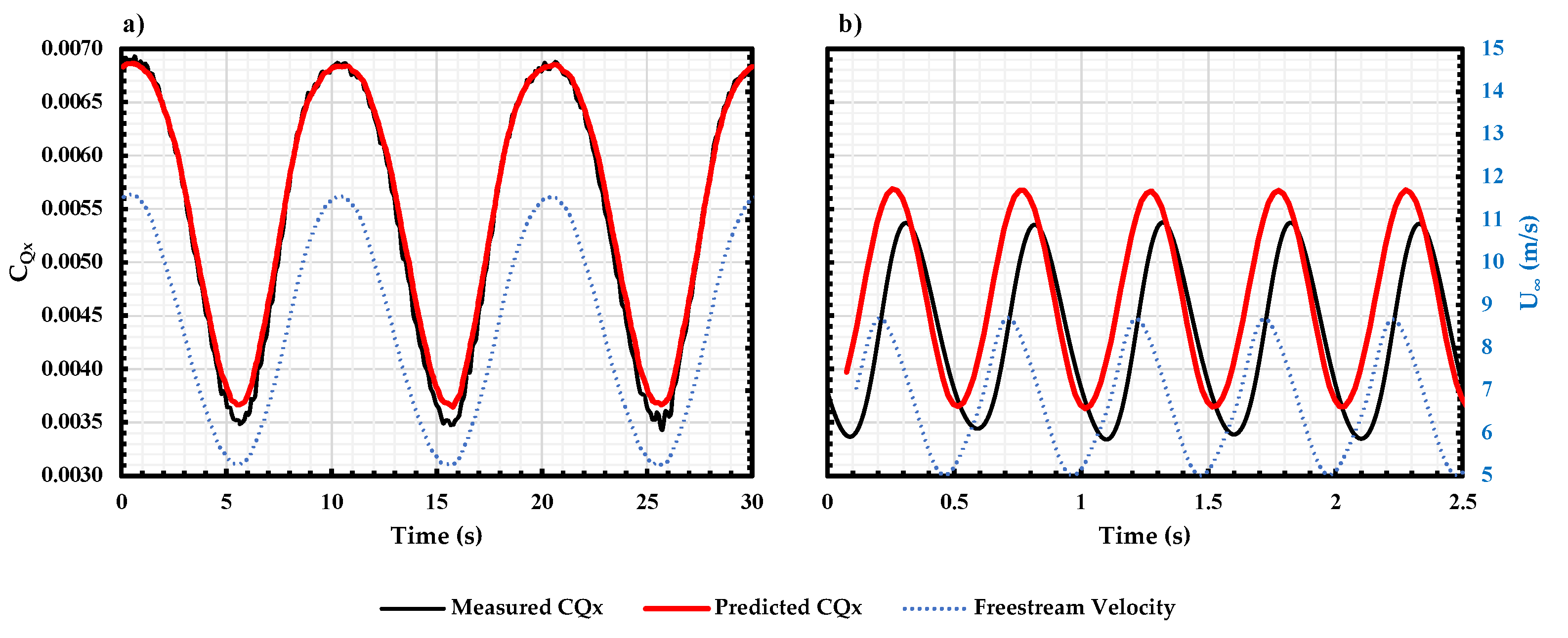
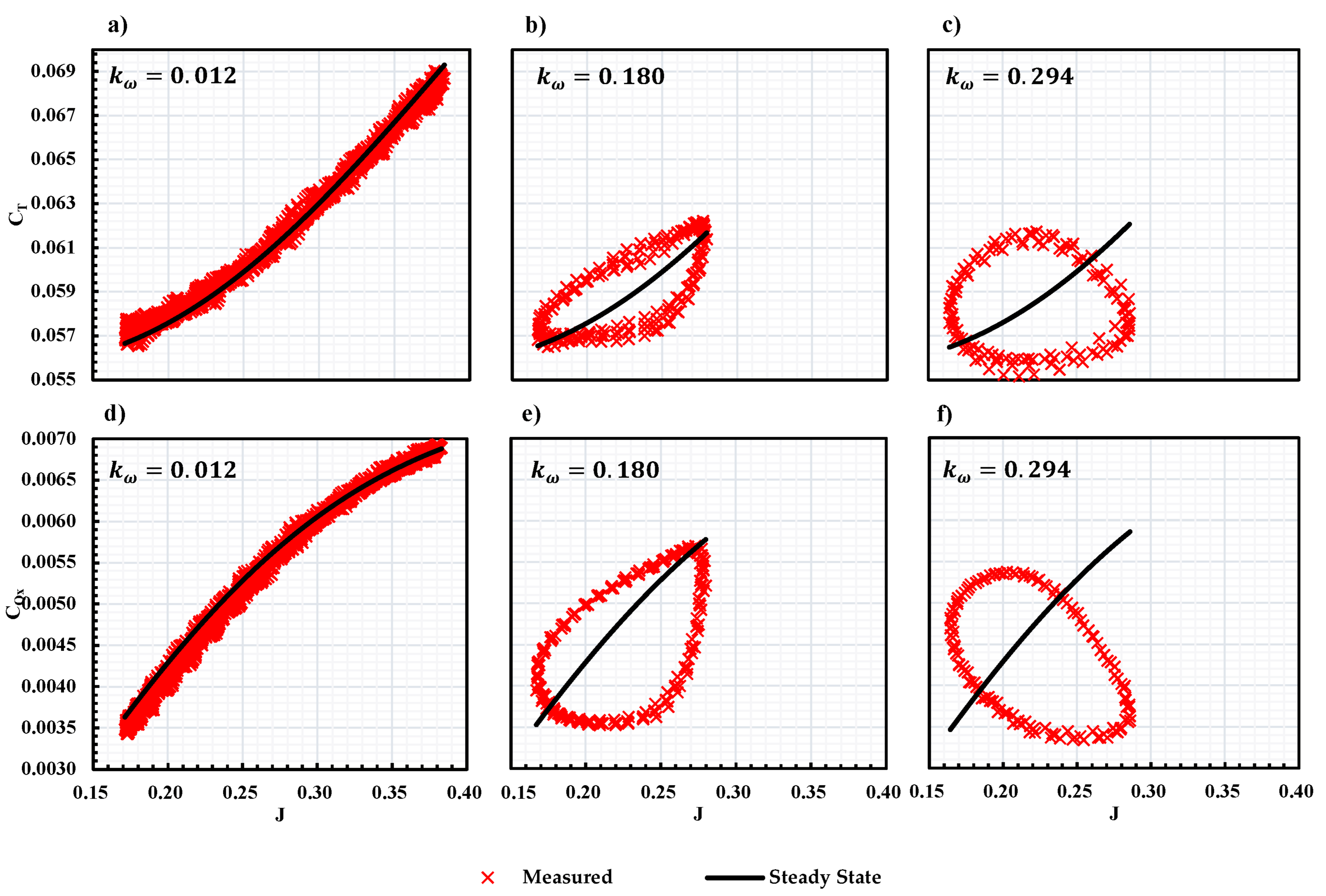
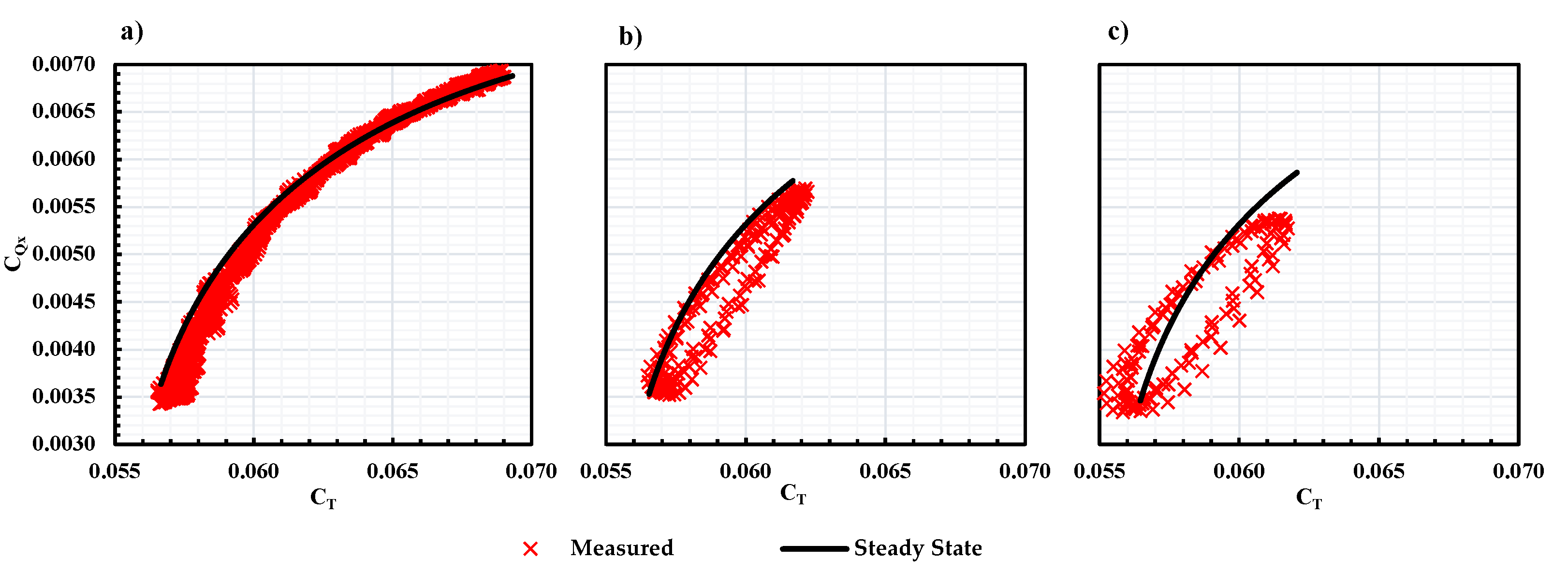
4.2. Propeller Performance under Time-Varying Sinusoidal Freestream
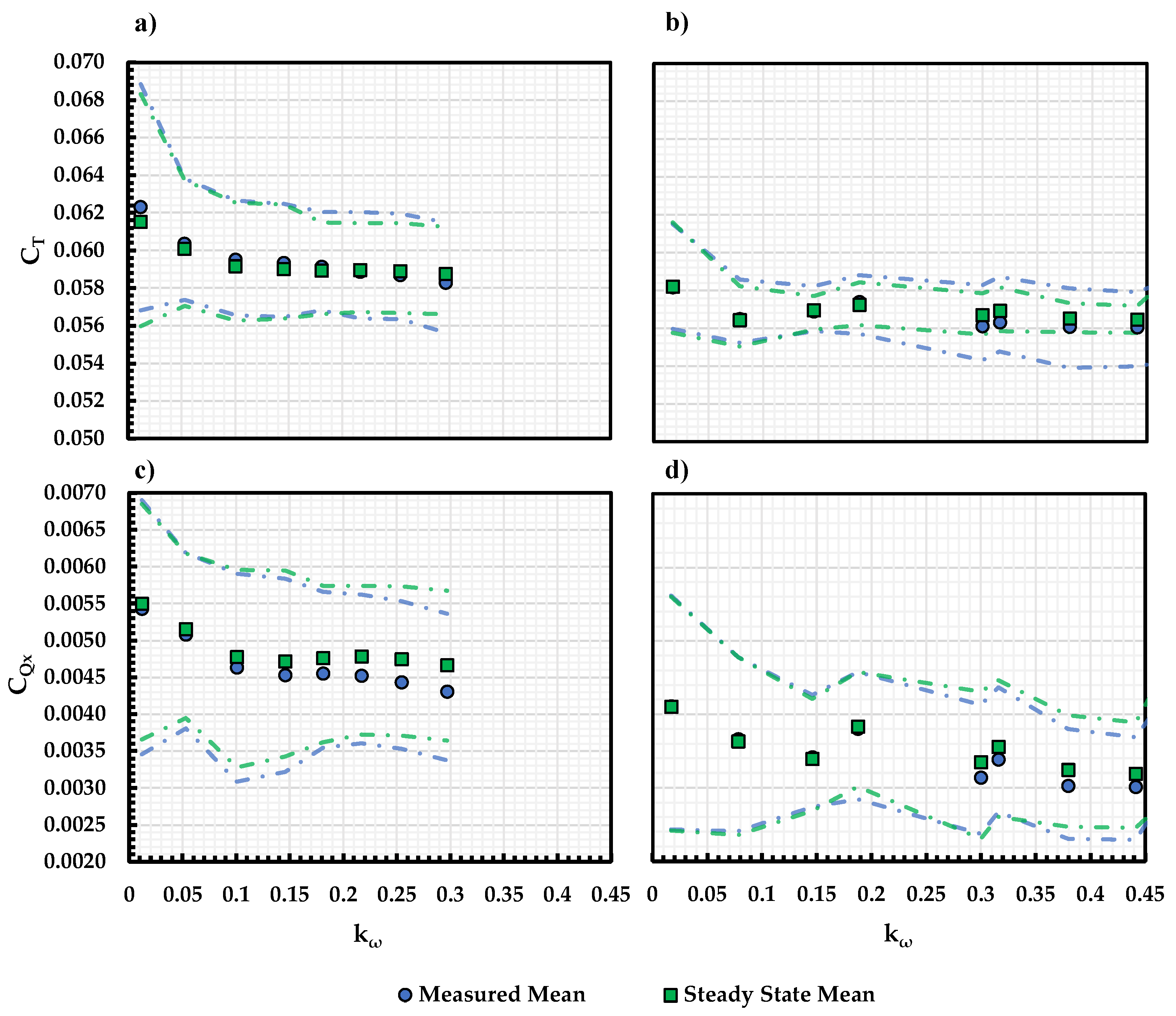
4.2.1. KDE 12.5 × 4.3 Propeller
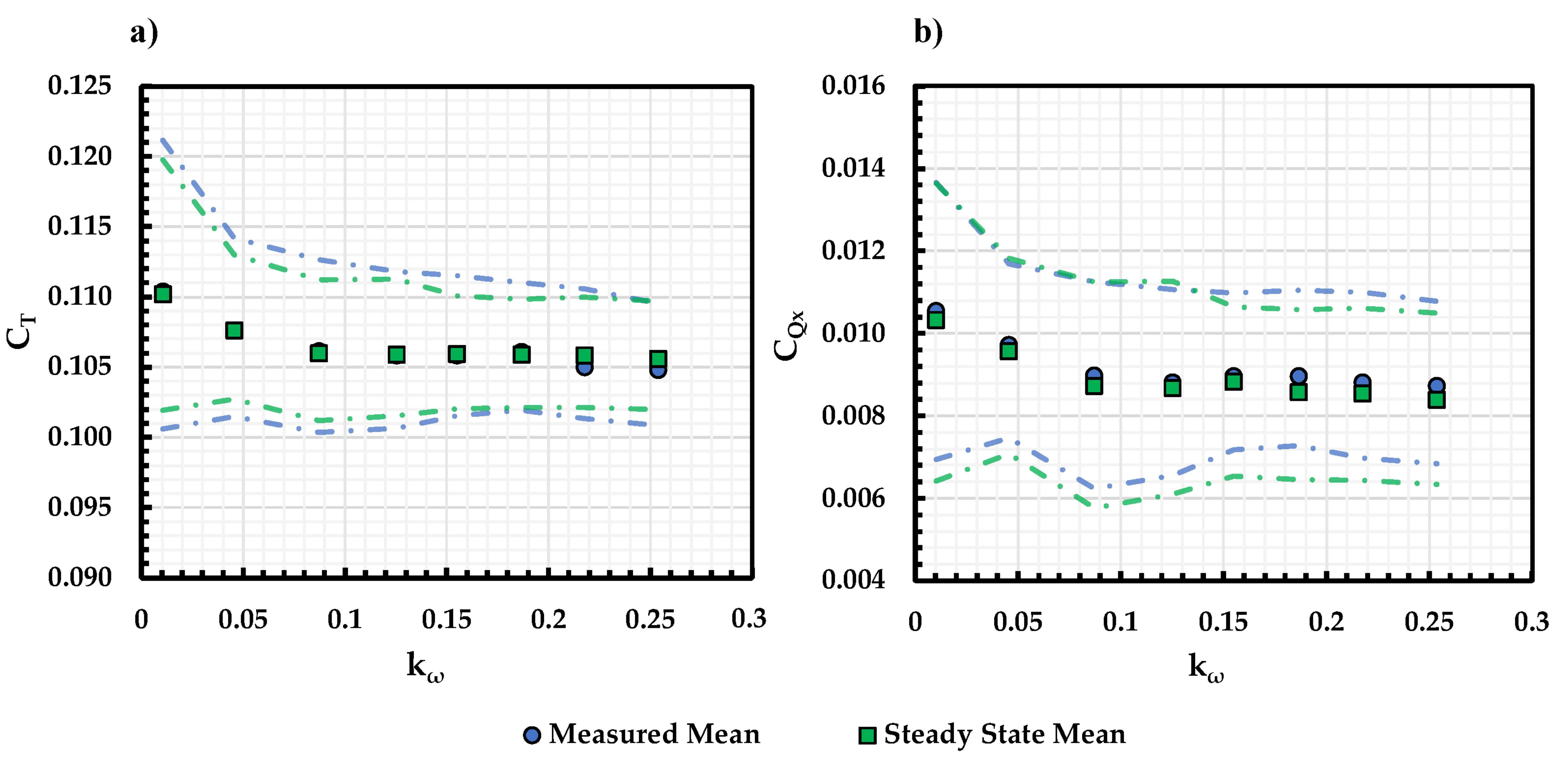
4.2.2. APC 11 × 7 Propeller
4.3. Effect of the Propeller Incidence Angle
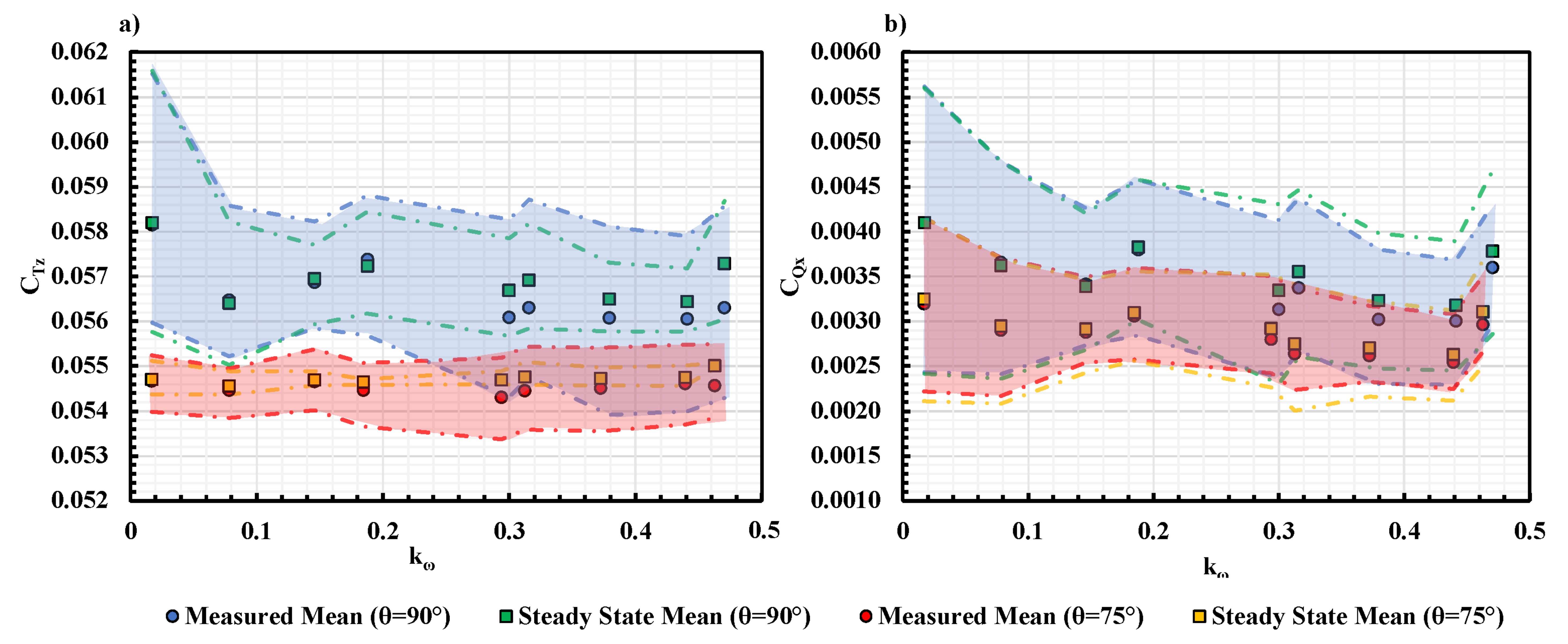
4.3.1. KDE 12.5 × 4.3 Propeller
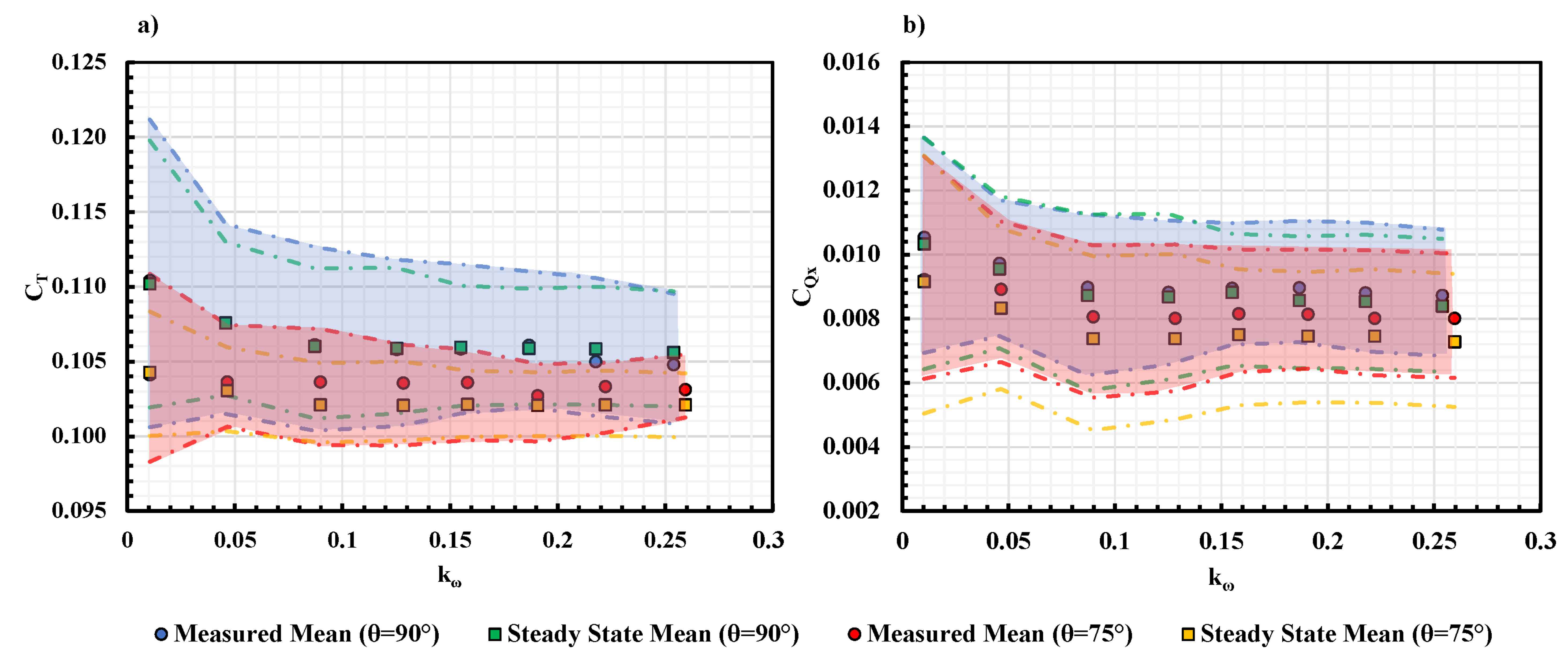
4.3.2. APC 11 × 7 Propeller
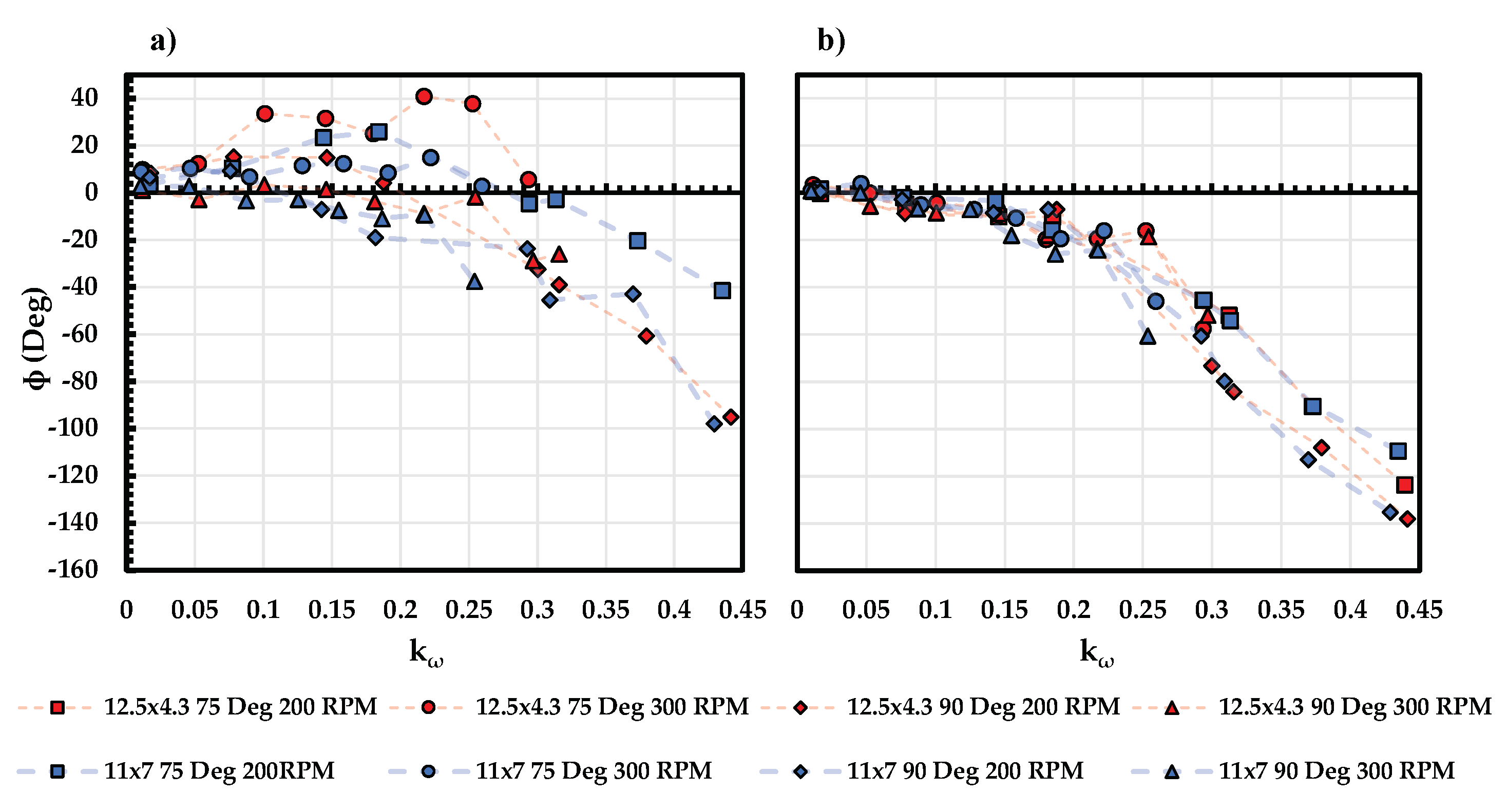
4.4. Phase Response of Propellers
5. Conclusions
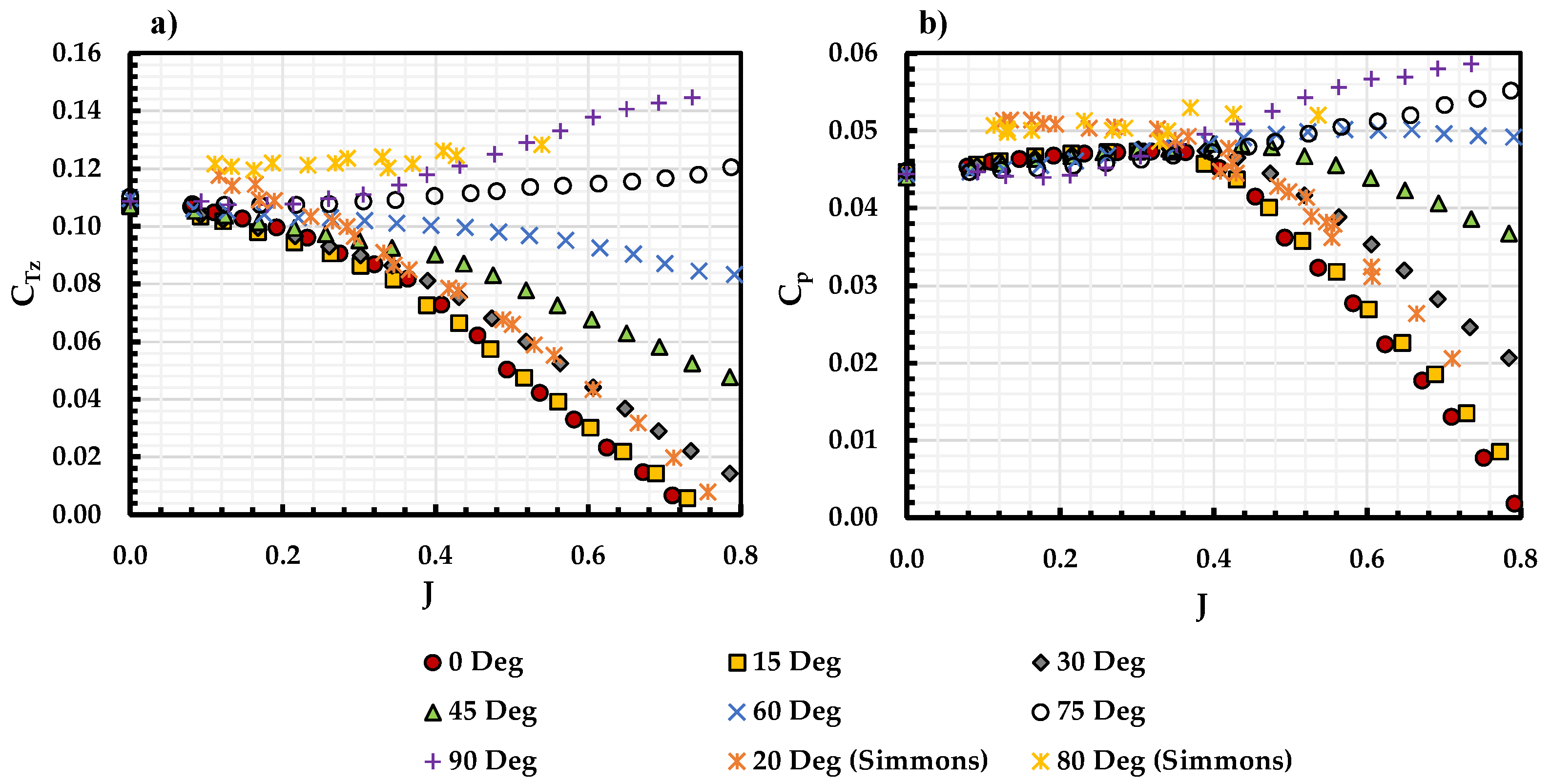
- An increment in propeller thrust, power, pitching moment, and rolling moment was found with the increment of incidence angle at the same advance ratio, which is consistent with the helicopter literature [9].
- Using the normalized advance ratio, and , the propeller performance under various incidence angles collapses, except for thrust and power coefficient in near edgewise flight conditions.
- A good fit between the steady-state model and measurement is found for both coefficients up to a reduced frequency of 0.2.
- A reduction in both coefficients is found at a higher reduced frequency under 90 and 75 incidence angles for the lower propeller. For the higher propeller, an increment in both coefficients is observed at .
- A phase lag in the propeller response is also observed at a higher reduced frequency range. The phase lag for the pitching moment overlaps for all cases. While the phase lag for the propeller thrust depends on the incidence angle.
- A reduction in the incidence angle leads to a phase lead in the thrust coefficient at a small reduce frequency range and a smaller phase lag at a higher reduced frequency range.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| c | Propeller local chord length, (m) |
| Propeller thrust coefficient; | |
| Propeller Power coefficient; | |
| Propeller torque coefficient; | |
| D | Propeller diameter, (m) |
| J | Advance ratio; |
| Normalized advance ratio | |
| Normalized shuttering system frequency | |
| n | Propeller rotational speed per second |
| P | Power, (W) |
| Q | Torque, () |
| T | Thrust, (N) |
| Propeller incidence angle, () | |
| Propeller pitch, (m) | |
| Propeller local blade pitch angle, () | |
| Shuttering system frequency, () | |
| Wind tunnel fan rotational speed, () | |
| Phase lag, () |
References
- Joby-Aviation. Available online: https://www.jobyaviation.com/ (accessed on 1 November 2021).
- Ascendance Flight Technologies ATEA. Available online: https://www.ascendance-ft.com/ (accessed on 1 November 2021).
- Jones, A.R. Gust encounters of rigid wings: Taming the parameter space. Phys. Rev. Fluids 2020, 5, 110513. [Google Scholar] [CrossRef]
- Granlund, K.; Monnier, B.; Ol, M.; Williams, D. Airfoil longitudinal gust response in separated vs. attached flows. Phys. Fluids 2014, 26, 027103. [Google Scholar] [CrossRef]
- Greenblatt, D. Unsteady Low-Speed Wind Tunnels. AIAA J. 2016, 54, 1817–1830. [Google Scholar] [CrossRef]
- Retelle, J.; McMichael, J.; Kennedy, D. Harmonic Optimization of a Periodic FlowWind Tunnel. J. Aircr. 1981, 18, 618–623. [Google Scholar] [CrossRef]
- Gloutak, D.; Jansen, K.; Farnsworth, J. Impact of Streamwise Gusts on the Aerodynamic Performance of a Finite-SpanWing. In Proceedings of the 2022 AIAA SciTech Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- Farnsworth, J.; Sinner, D.; Gloutak, D.; Droste, L.; Bateman, D. Design and qualification of an unsteady low-speed wind tunnel with an upstream louver system. Exp. Fluids 2020, 61, 181. [Google Scholar] [CrossRef]
- Leishman, G. Principles of Helicopter Aerodynamics; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- Lowey, R.G. A Two-Dimensional Approximation to the Unsteady Aerodynamics of Rotary Wings. J. Am. Helicopter Soc. 1957, 24, 81–92. [Google Scholar] [CrossRef]
- Jones, J.P. The Influence of the Wake on the Flutter and Vibration or Rotor Blades. Aeronaut. Q. 1958, 9, 258–286. [Google Scholar] [CrossRef]
- Isaacs, R. Airfoil Theory for Flows of Variable Velocity. J. Aeronaut. Sci. 1945, 12, 113–117. [Google Scholar] [CrossRef]
- Strangfeld, C.; Müller-Vahl, H.; Nayeri, C.N.; Paschereit, C.O.; Greenblatt, D. Airfoil in a High Amplitude Oscillating Stream. J. Fluid Mech. 2016, 793, 79–108. [Google Scholar] [CrossRef]
- Wang, B.; Ali, Z.A.; Wang, D. Controller for UAV to Oppose Different Kinds of Wind in the Environment. J. Control Sci. Eng. 2020, 2020, 5708970. [Google Scholar] [CrossRef]
- Kugelberg, E.; Andersson, O. Wind Vector Estimation by Drone. Master’s Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2020. [Google Scholar]
- Whidborne, J.F.; Cooke, A.K. Gust Rejection Properties of VTOL Multirotor Aircraft. IFAC-PapersOnLine 2017, 50, 175–180. [Google Scholar] [CrossRef]
- McCrink, M.; Seth, D.; Herz, S. Quadrotor Performance Measurement During Wake and Gust Encounters. In Proceedings of the AIAA Aviation 2022 Forum, Chicago, IL, USA, 27 June–1 July 2022; p. 4064. [Google Scholar]
- Simmons, B.M.; Hatke, D.B. Investigation of High Incidence Angle Propeller Aerodynamics for Subscale eVTOL Aircraft; NASA/TM-20210014010; NASA: Washington, DC, USA, 2021.
- McLemore, H.C.; Cannon, M.D. Aerodynamic Investigation of a Four-Blade Propeller Operating through an Angle of Attack from 0 Degree to 180 Degree; NASA: Washington, DC, USA, 1954.
- ATI. F/T Mini-40 Sensor. Available online: http://www.ati-ia.com/ (accessed on 1 November 2018).
- MathWorks, Designfilt, FIR Band Stop Filter. Available online: https://www.mathworks.com/ (accessed on 1 November 2018).
- DANTEC Dynamics. Hot Wire and Mini-CTA 54T30. Available online: https://www.dantecdynamics.com (accessed on 1 May 2020).
- National Instruments. USB-6259 DAQ. Available online: https://www.ni.com/en-us.html (accessed on 1 November 2020).
- Thorlabs. DET10A Photodiode. Available online: https://www.thorlabs.com/ (accessed on 1 November 2020).
- Cai, J.; Gunasekaran, S.; Ol, M.V. Effect of Partial Ground and Partial Ceiling on Propeller Performance. AIAA J. Aircr. 2023, 60, 648–661. [Google Scholar] [CrossRef]
- Cai, J.; Gunasekaran, S. Sinusoidal Gust Response of RC Propellers at Different Incidence Angles. In Proceedings of the AIAA Scitech 2022 Forum, San Diego, CA, USA, 3–7 January 2022. [Google Scholar]
- APC Thin Electric Propeller. APC Propellers. Available online: https://www.apcprop.com/ (accessed on 1 November 2018).
- Cook, T.; Gunasekaran, S.; Ol, M.V.; Mongin, M.P. Frequency Response of a Shuttered Open Jet Wind Tunnel. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar]
- MathWorks, Nonlinear-ARX Model. Available online: https://www.mathworks.com/help/ident/ug/what-are-nonlinear-arx-models.html (accessed on 1 November 2018).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Propeller Type | Diameter (m) | Pitch (m) | Blade Twist Angle at 75% Radius (°) |
|---|---|---|---|
| KDE 12.5 × 4.3 | 0.3175 | 0.1100 | 8.3 |
| APC 11 × 7E | 0.2794 | 0.1778 | 15.1 |
| Test Conditions | Values |
|---|---|
| Propeller RPS (n) | 80, 100 RPS |
| Freestream Velocity () | 0, 22 m/s |
| Propeller Incidence Angle () | 75, 90 Degree |
| Shuttering System Frequency () | 0–2.0 Hz |
| Propeller Reduced Frequency () | 0–0.45 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cai, J.; Gunasekaran, S. Frequency Response of RC Propellers to Streamwise Gusts in Forward Flight. Wind 2023, 3, 253-272. https://doi.org/10.3390/wind3020015
Cai J, Gunasekaran S. Frequency Response of RC Propellers to Streamwise Gusts in Forward Flight. Wind. 2023; 3(2):253-272. https://doi.org/10.3390/wind3020015
Chicago/Turabian StyleCai, Jielong, and Sidaard Gunasekaran. 2023. "Frequency Response of RC Propellers to Streamwise Gusts in Forward Flight" Wind 3, no. 2: 253-272. https://doi.org/10.3390/wind3020015