
Development of a Clock Generation and Time Distribution System for Hyper-Kamiokande †

 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Context
1.2. Timing Needs and Requirements
2. Materials and Methods
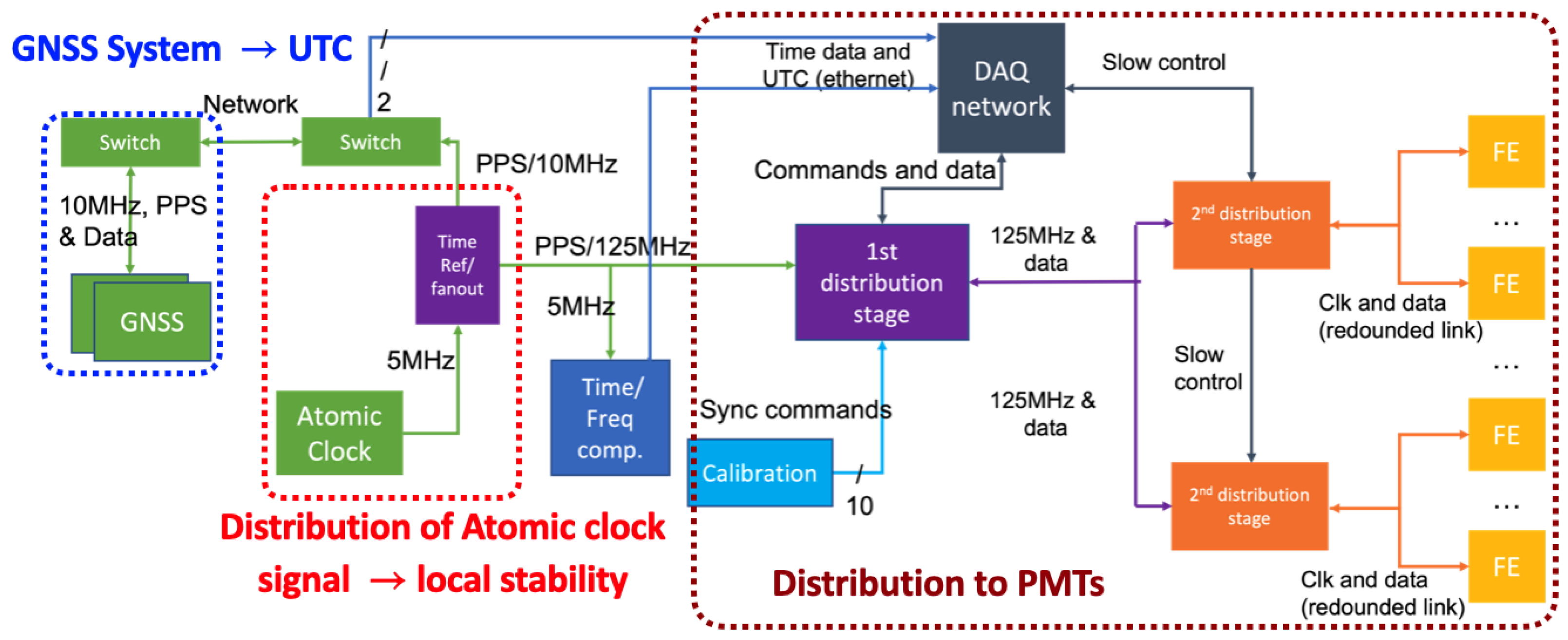
2.1. Proposed Solution
2.2. GNSS Receiver
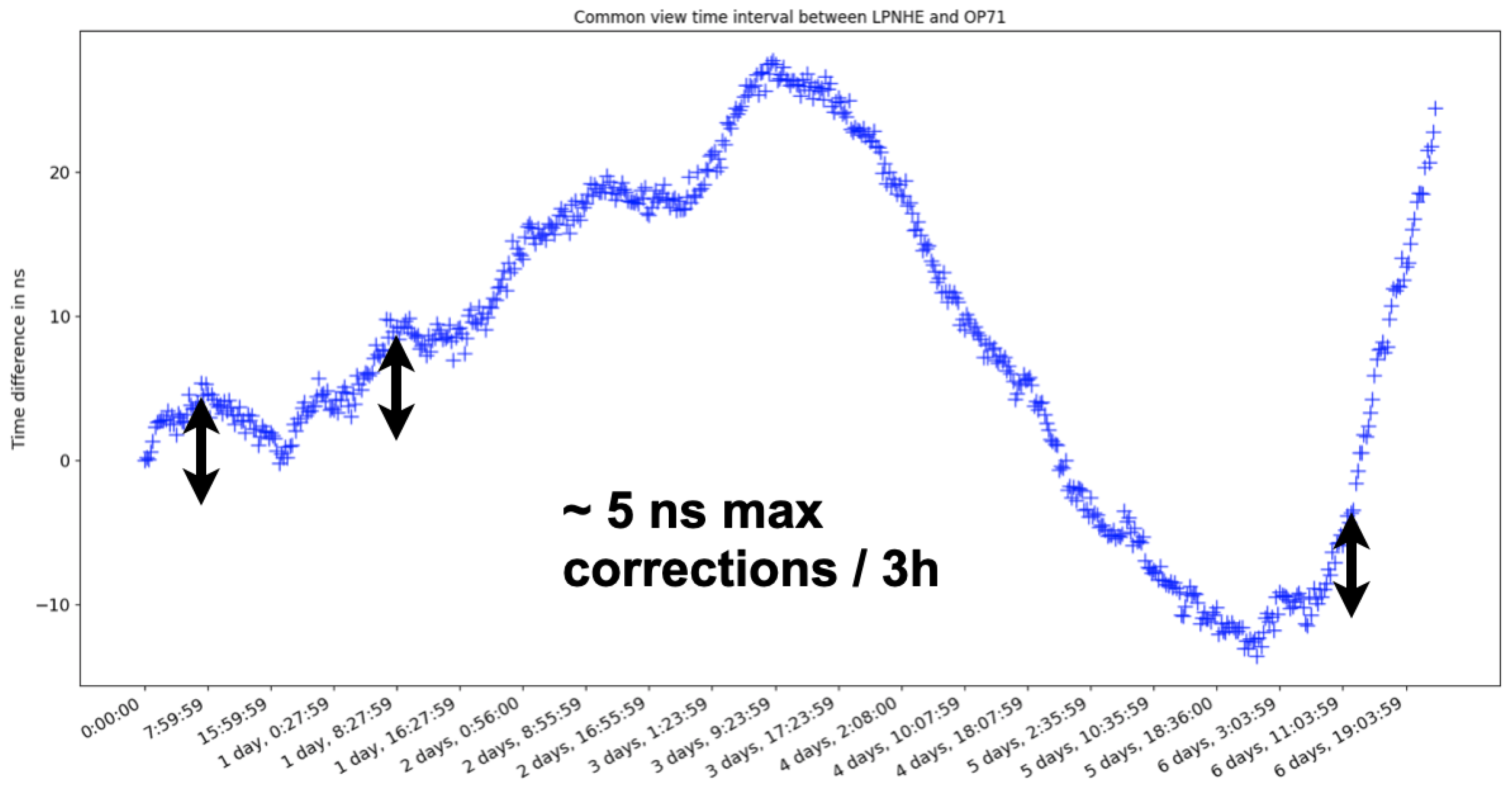
2.3. The Common-View Time-Transfer Technique
3. Results
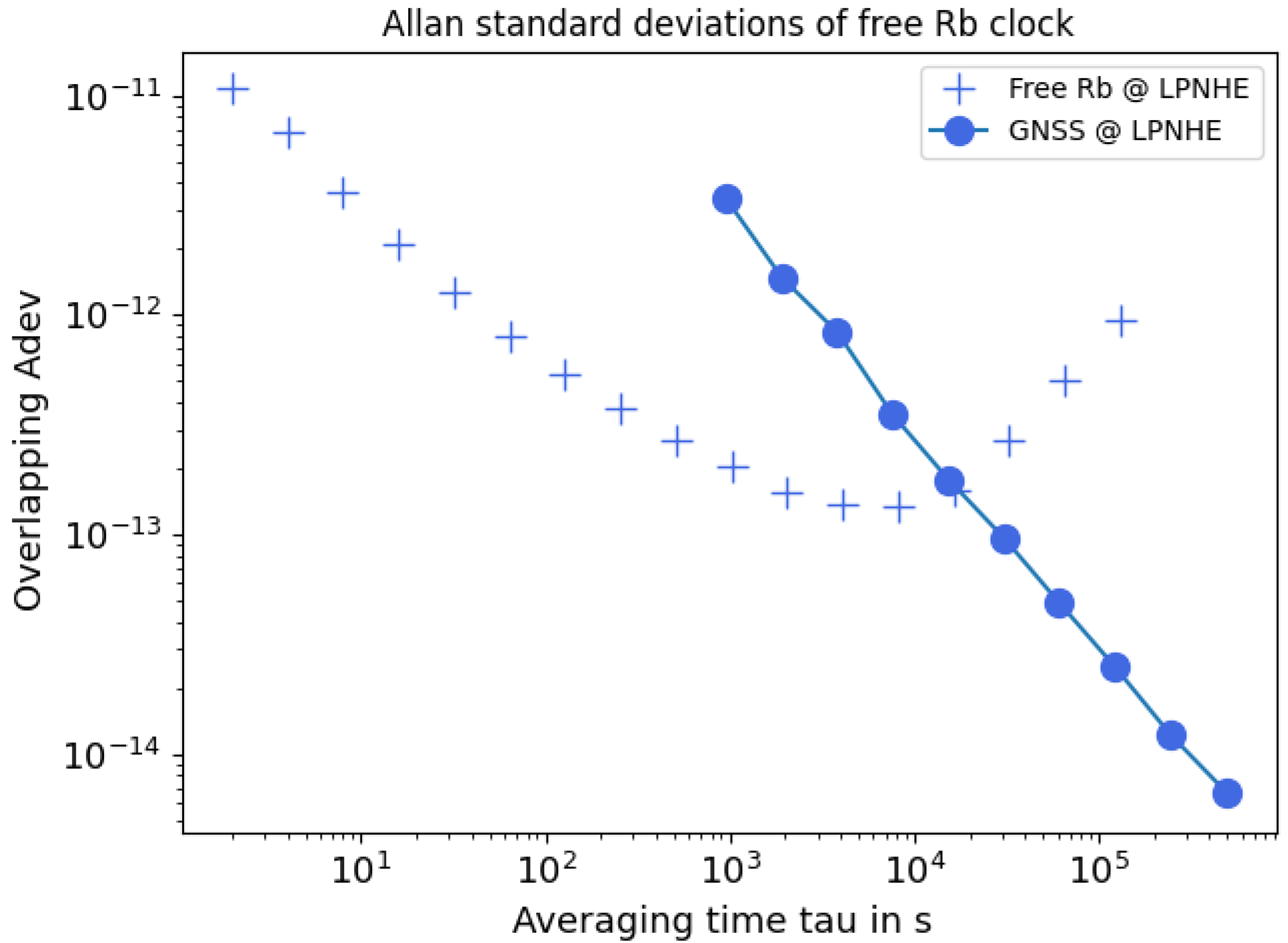
3.1. Clock Signal Generation
3.2. Time Distribution
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite Systems |
| GPS | Global Positioning System |
| UTC | Universal Time Coordinated |
| R&D | Research and Development |
| SYRTE | SYstèmes de Référence Temps-Espace (lab) |
References
- Abe, K.; Abgrall, N.; Aihara, H.; Ajima, Y.; Albert, J.B.; Allan, D.; Amaudruz, P.-A.; Andreopoulos, C.; Andrieu, B.; Anerella, M.D.; et al. The T2K Experiment. Nucl. Instrum. Methods A 2011, 659, 106–135. [Google Scholar] [CrossRef]
- Abe, K.; Aihara, H.; Ajmi, A.; Alt, C.; Andreopoulos, C.; Antonova, M.; Aoki, S.; Asada, Y.; Ashida, Y.; Atherton, A.; et al. J-PARC Neutrino Beamline Upgrade Technical Design Report. arXiv 2019, arXiv:1908.05141. [Google Scholar]
- Fukuda, S.; Fukuda, Y.; Hayakawa, T.; Ichihara, E.; Ishitsuka, M.; Itow, Y.; Kajita, T.; Kameda, J.; Kaneyuki, K.; Kasuga, S.; et al. The Super-Kamiokande detector. Nucl. Instrum. Methods A 2003, 501, 418–462. [Google Scholar]
- Abe, K.; Abe, K.; Aihara, H.; Aimi, A.; Akutsu, R.; Andreopoulos, C.; Anghel, I.; Anthony, L.H.V.; Antonova, M.; Ashida, Y.; et al. Hyper-Kamiokande Design Report. arXiv 2016, arXiv:1805.04163. [Google Scholar]
- Abe, K.; Adam, J.; Aihara, H.; Akiri, T.; Andreopoulos, C. Upper bound on neutrino mass based on T2K neutrino timing measurements. Phys. Rev. Am. Phys. Soc. 2016, 93, 012006. [Google Scholar] [CrossRef]
- Lombardi, M. Fundamentals of Time and Frequency. In The Mechatronics Handbook; CRC Press: Boca Raton, FL, USA, 2002; ISBN 978-0-8493-6358-0. [Google Scholar]
- Lombardi, M.A.; Nelson, L.M.; Novick, A.N.; Zhang, V.S. Time and Frequency Measurements Using the Global Positioning System. Cal Lab Int. J. Metrol. 2001, 8, 26–33. [Google Scholar]
- The OPERA Collaboration; Adam, T.; Agafonova, N.; Aleksandrov, A.; Altinok, O.; Alvarez Sanchez, P.; Anokhina, A.; Aoki, S.; Ariga, A.; Ariga, T.; et al. Measurement of the neutrino velocity with the OPERA detector in the CNGS beam. J. High Energy Phys. 2011, 2012, 93. [Google Scholar] [CrossRef]
- Septentrio Polant Choke Ring Antenna Web Page. 2021. Available online: https://www.septentrio.com/en/products/antennas/chokering-b3-e6 (accessed on 4 October 2022).
- Septentrio Polarx5tr Gnss Receiver Web Page. 2021. Available online: https://www.septentrio.com/en/products/gnss-receivers/reference-receivers/polarx-5tr (accessed on 4 October 2022).
- Stanford Research System fs725 Rubidium Atomic Clock Web Page. 2021. Available online: https://www.thinksrs.com/products/fs725.html (accessed on 4 October 2022).
- Allan, D.W. Statistics of Atomic Frequency Standards; IEEE: Piscataway, NJ, USA, 1966; Volume 54, pp. 221–230. [Google Scholar] [CrossRef]
- Defraigne, P.; Petit, G. CGGTTS-Version 2E: An Extended Standard for GNSS Time Transfer. Metrologia 2015, 52, 6. [Google Scholar] [CrossRef]
- Available online: https://syrte.obspm.fr/spip/services/ref-temps/article/logiciel-de-raccordement-a-utc-op (accessed on 4 October 2022).
- Available online: https://www.bipm.org/en/time-ftp/circular-t (accessed on 4 October 2022).



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mellet, L.; Guigue, M.; Popov, B.; Russo, S.; Voisin, V., on behalf of the Hyper-Kamiokande Collaboration. Development of a Clock Generation and Time Distribution System for Hyper-Kamiokande. Phys. Sci. Forum 2023, 8, 72. https://doi.org/10.3390/psf2023008072
Mellet L, Guigue M, Popov B, Russo S, Voisin V on behalf of the Hyper-Kamiokande Collaboration. Development of a Clock Generation and Time Distribution System for Hyper-Kamiokande. Physical Sciences Forum. 2023; 8(1):72. https://doi.org/10.3390/psf2023008072
Chicago/Turabian StyleMellet, Lucile, Mathieu Guigue, Boris Popov, Stefano Russo, and Vincent Voisin on behalf of the Hyper-Kamiokande Collaboration. 2023. "Development of a Clock Generation and Time Distribution System for Hyper-Kamiokande" Physical Sciences Forum 8, no. 1: 72. https://doi.org/10.3390/psf2023008072