
Nonlinear Fault-Tolerant Vibration Control for Partial Actuator Fault of a Flexible Arm


Abstract
:1. Introduction
- 1.
- The double-sided interactive SAM actuator is used for vibration suppression of the load-attached flexible arm with the partial actuator fault.
- 2.
- Robust stability and the desired tracking performance of the nonlinear vibration control system have improved by the reconfigurable controller even if in the presence of an actuator fault.
- 3.
- Fault-tolerant dynamic is carried out for partial actuator fault by experiment results.
2. Preliminaries and Basic Theory
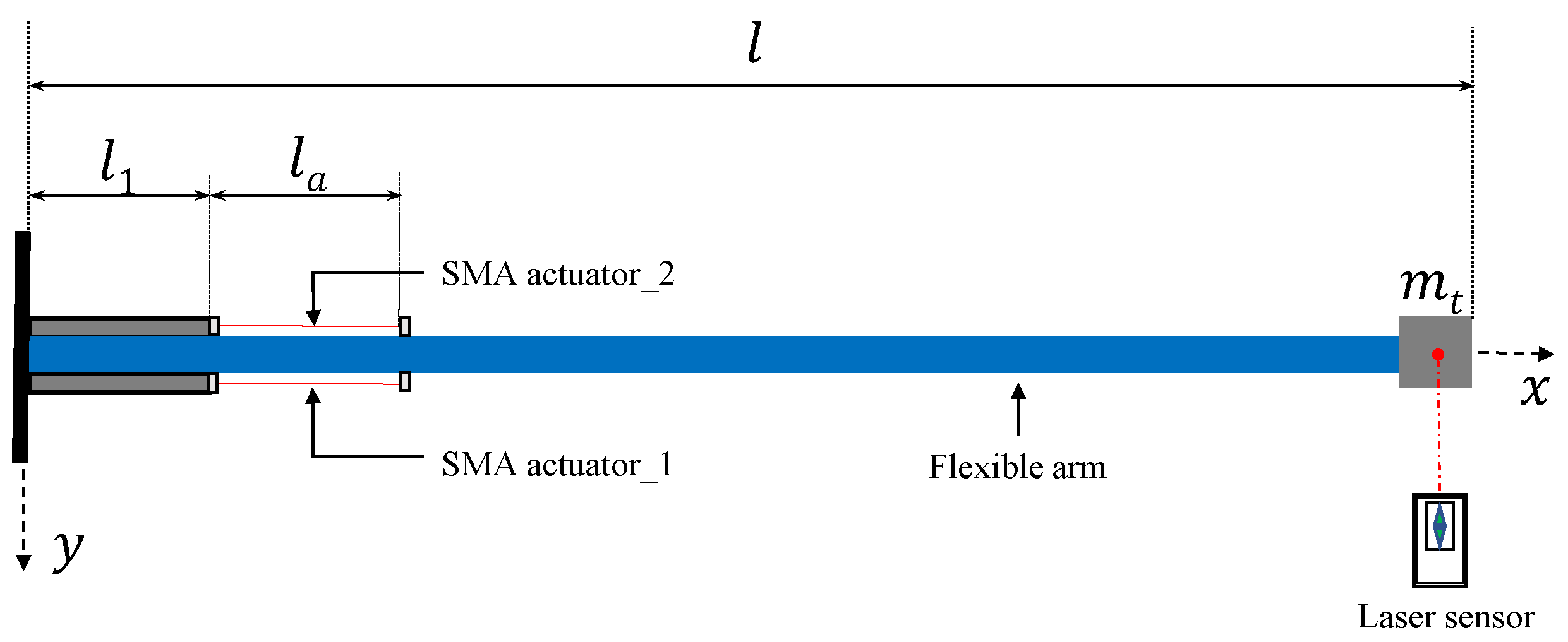
2.1. Overview of the Flexible Arm
2.2. Vibration Model of the Load-Attached Flexible Arm

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Parameters [Unit] | Value |
|---|---|---|
| Density | 2700 | |
| Cross-sectional area | ||
| Young’s modulus | ||
| Moment of inertia of area | ||
| First order damping modulus | ||
| Position of SMA | ||
| Length | ||
| Mass of load |
2.3. Thermal Model of the Interactive SMA Actuator
2.4. PI Hysteresis Model of the Interactive SMA Actuator
2.5. Operator Theory
- Right factorization
- The given plant operator P: U→Y is said to have a right factorization if there exist two stable operators D: W→U and N: W→Y, such that D is invertible and . The linear space W is called a quasi-state space.
- Right coprime factorization
- If there exist two stable operators A: Y→U and B: U→U satisfying the Bezout identifywhere the operator B is invertible, M∈ is the unimodular operator.
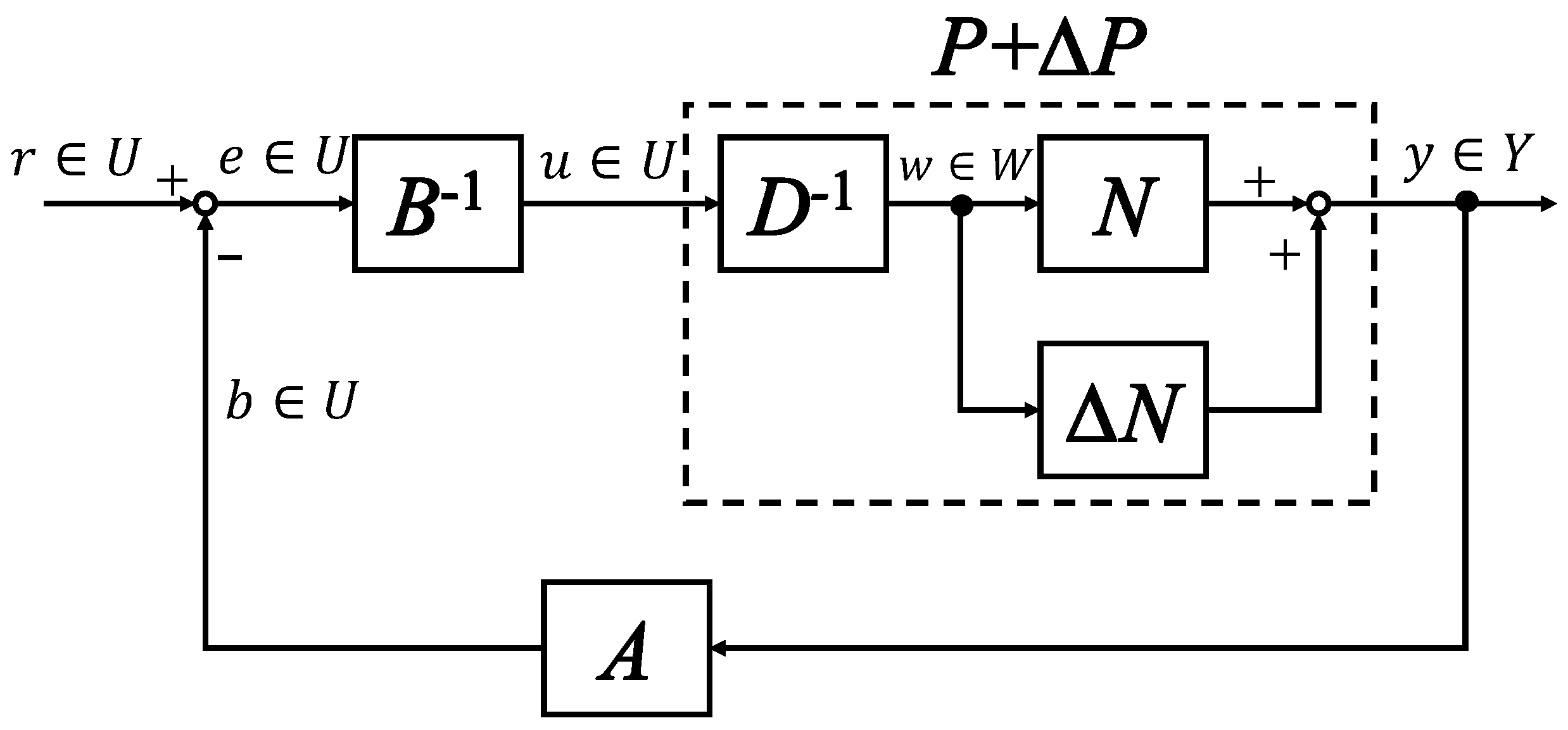
- Robust right coprime factorization
- In Figure 2, the Bezout identity for the given plant with uncertainty is formulated by
- The system is said to have robust stability property if the corresponding control system with uncertainty remains stable. Generally speaking, if ⊆, where is a null set defined by
- Δ denotes unknown bounded uncertainty. A sufficient condition of robust stability for right coprime factorization was proposed in [29]. If the designed operators are satisfiedwhere · denotes the generalized Lipschitz operator. Then, the system is robust and stable for uncertainty .

2.6. Fault-Tolerant Control
2.7. Problem Setup
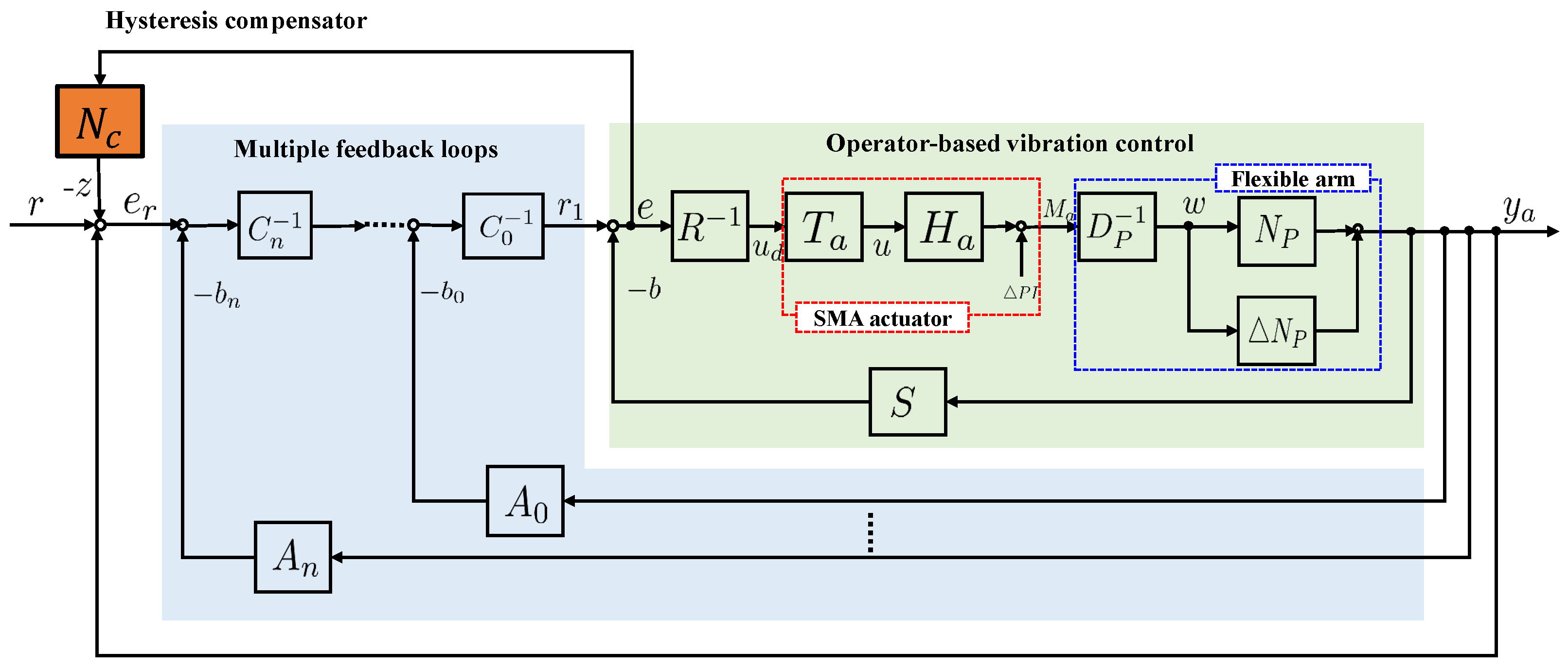
3. Nonlinear Fault-Tolerant Vibration Control System
- Nonlinear vibration controller is to guarantee robust stabilization by using robust right coprime factorization.
- The hysteresis compensator is to eliminate the effect of hysteresis behavior.
- The tracking controller and the reconfigurable controller can be obtained by multiple feedback loops even if in the presence of a fault.
3.1. Operator-Based Fault-Tolerant Vibration Control
3.2. Design of Hysteresis Compensator
3.3. Tracking Controller Using Multiple Unimodular Operators
- Normal conditions
- First, based on operators and in Equation (28), two stable operators and are designed to satisfy the following Bezout identity.
- Next, based on operators and , the formulation of multiple feedback loops is described in the following.where the unimodular operators satisfy geometric progression with a geometric ratio of . In each feedback loop, the operators and are designed to satisfy the corresponding Bezout identity, respectively. The designed controllers are shown as follows.where the designed parameters , , , k, are 0.0055, 0.07, 0.0035, 0.92, 0.9, respectively. When each feedback loop of the designed n-times feedback loops satisfies the Bezout identity, the desired tracking performance can be obtained in the control system.
- Faulty conditions
4. Results and Discussion
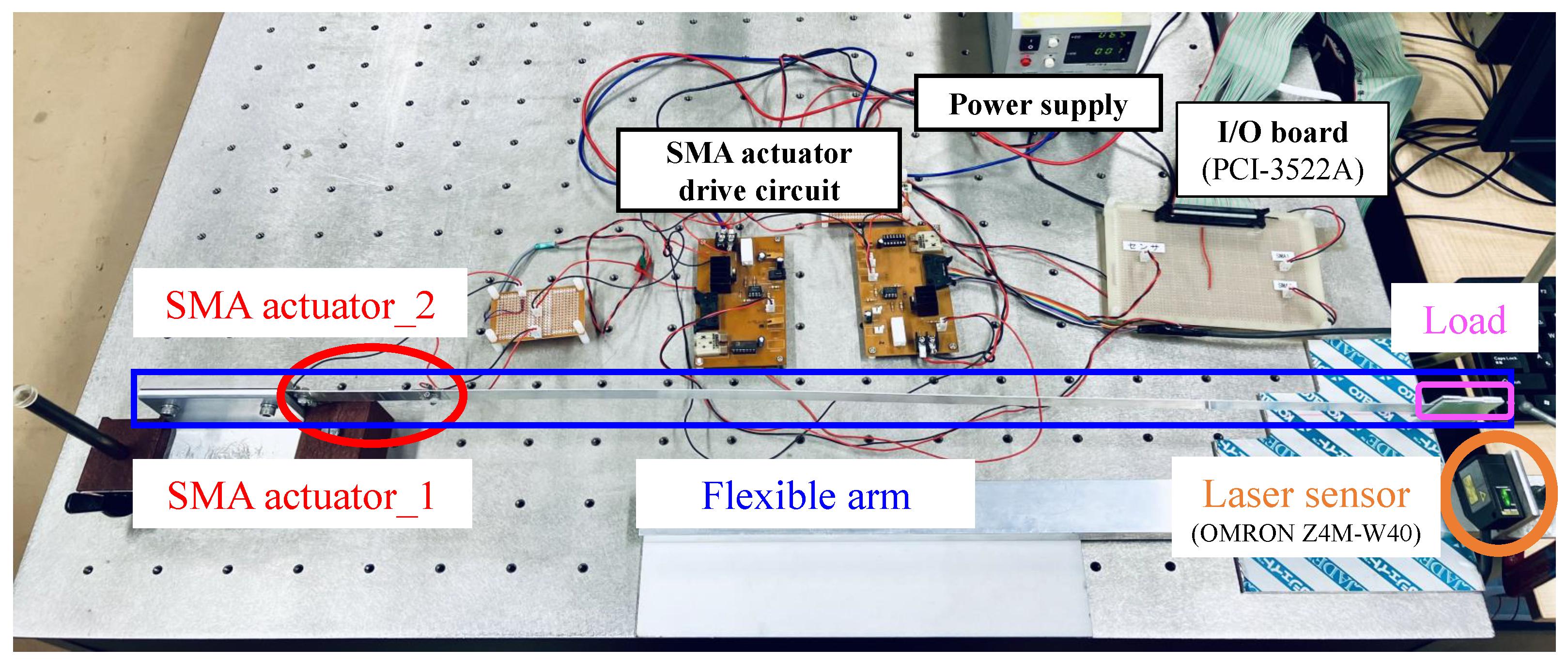
4.1. Experimental Results
- Double-sided interactive SMA actuation for vibration controller
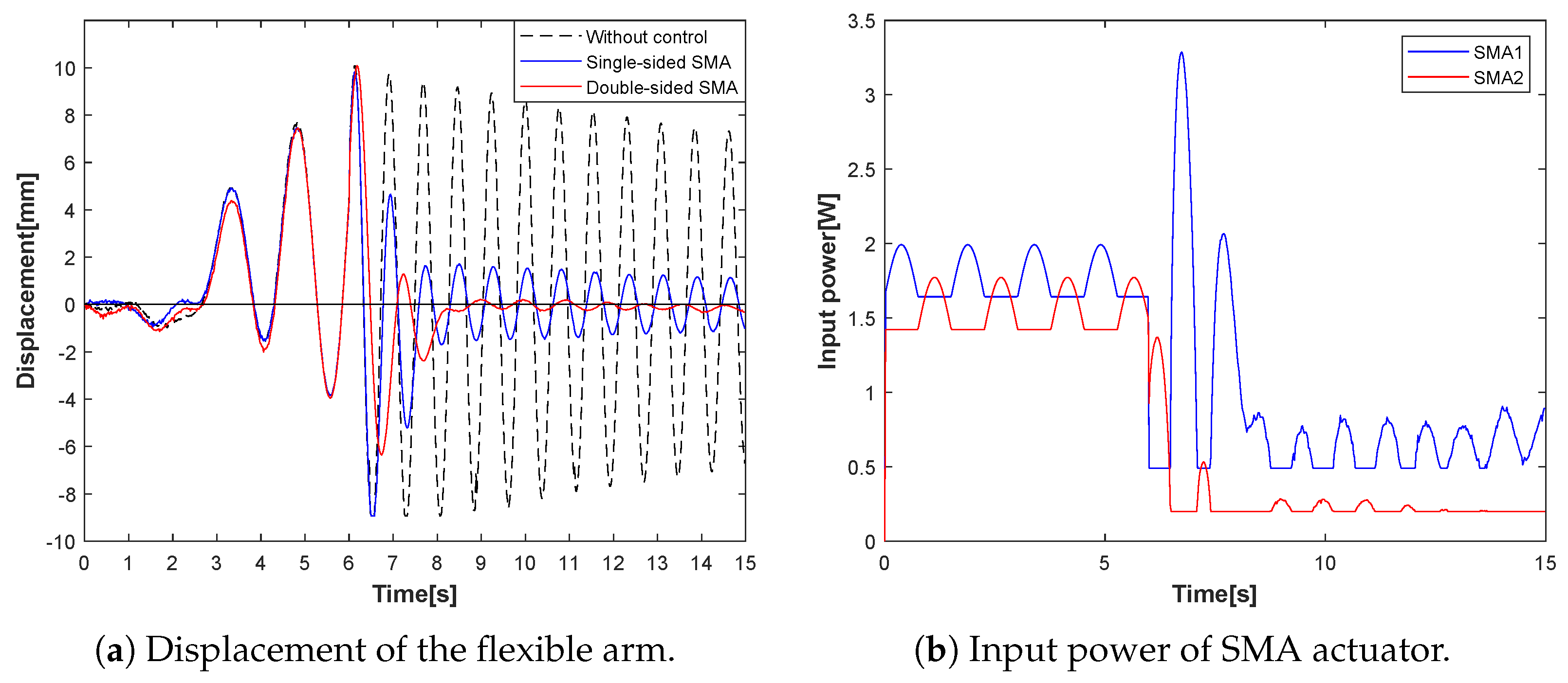
- In experimental case 1, the operator-based nonlinear vibration controller uses a single-sided and a double-sided SMA actuator, compared with free vibration without the vibration controller. The three displacements of the flexible arm are shown in Figure 6a, where the blue line is with a single-sided actuator, the red line is with a double-sided actuator, and the black dashed line is the free vibration as a reference result. The corresponding input power for the double-sided SMA actuator is presented in Figure 6b. The results show that the double-sided interactive actuator can stabilize the vibration to almost zero within 2 s, while the vibration displacement of the one-sided actuator tends to be 2 mm. Therefore, the double-sided interactive SMA actuation for the operator-based nonlinear vibration controller is better than that with a single-sided actuator.

- Hysteresis compensator for vibration controller
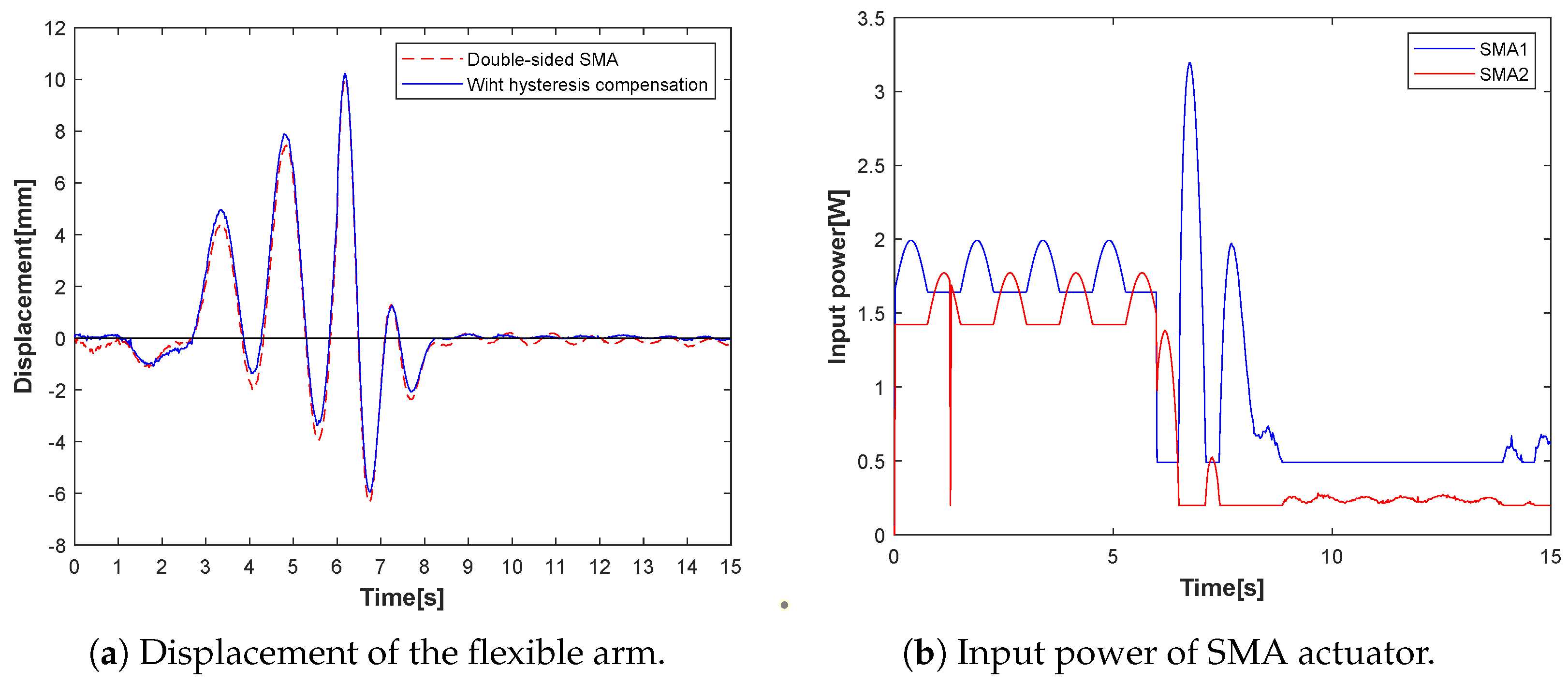
- In experimental case 2, the effectiveness of the hysteresis compensator is compared with the vibration controller in experimental case 1. The displacements of the flexible arm are shown in Figure 7a, where the blue line is a designed hysteresis compensator, and the red dashed line is without a hysteresis compensator as a reference result. The corresponding input power for the vibration controller with compensator is presented in Figure 7b. The results show that the designed hysteresis compensator can stabilize the vibration to zero with lower input power. Hence, the advantage of an interactive vibration controller with the designed hysteresis compensator is that less energy is consumed and more precise control is obtained.

- Fault-tolerant dynamics for vibration controller
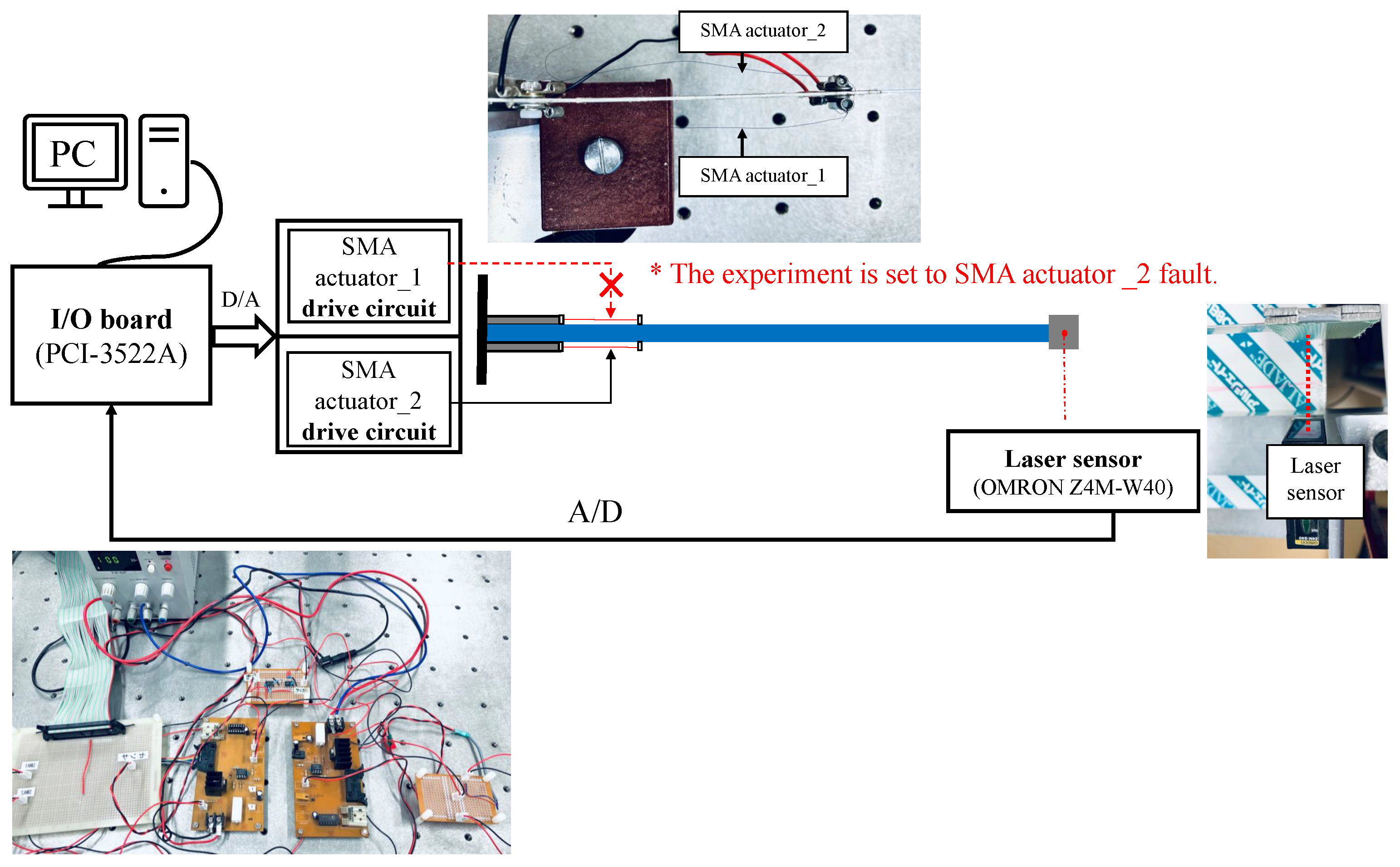
- In experimental case 3, the fault tolerance of the system is tested with the partial actuator fault. The displacements of the flexible arm are shown in Figure 8a, where the blue line is for the faulty condition, and the red dashed line is without actuator faults as a reference result. The corresponding input power for SMA actuator_2 fault is presented at time = 7.5 s in Figure 8b. When SMA actuator_2 loses the input signal at a given moment, the proposed vibration control system remains stable by increasing the input power of SMA actuator_1. The results verify that this method has a fault-tolerant dynamic for partial actuator fault. In addition, from the view of the physical structure, using double-sided actuator hardware redundancy will better secure the system.

- Fault-tolerant improvement for vibration controller
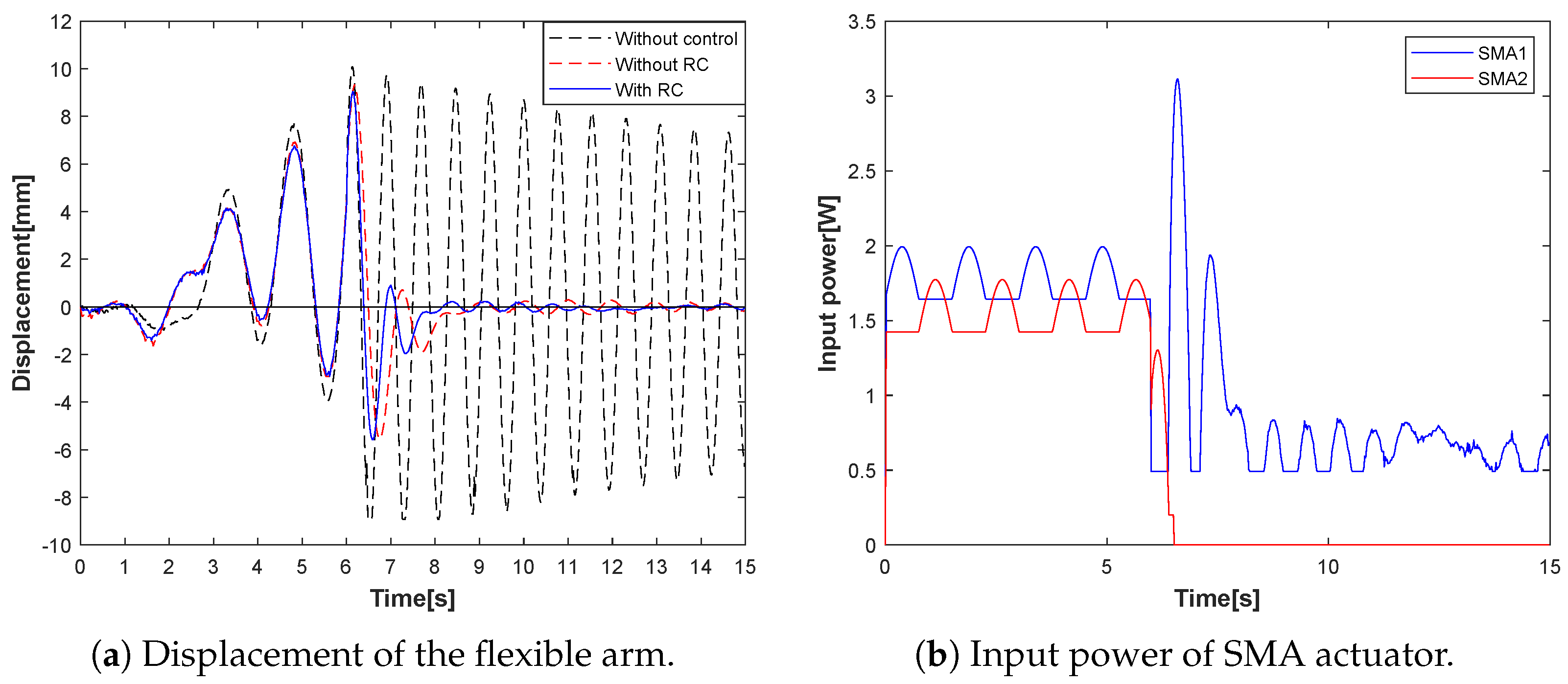
- In experimental case 4, the fault-tolerant improvement of the system has redesigned the parameters of as a reconfigurable controller (RC). The displacements of the flexible arm are shown in Figure 9a, where the blue line is for a reconfigurable controller (RC), and the red dashed line is without RC as a reference result. The corresponding input power for RC is presented as the SMA actuator_2 is set to the actuator fault at time = 6.5 s in Figure 9b, and the proposed vibration control system switches to the redesigned . In this case, the results prove that the reconfigurable controller has improved the fault-tolerant vibration control dynamic even if it is in the presence of the fault.

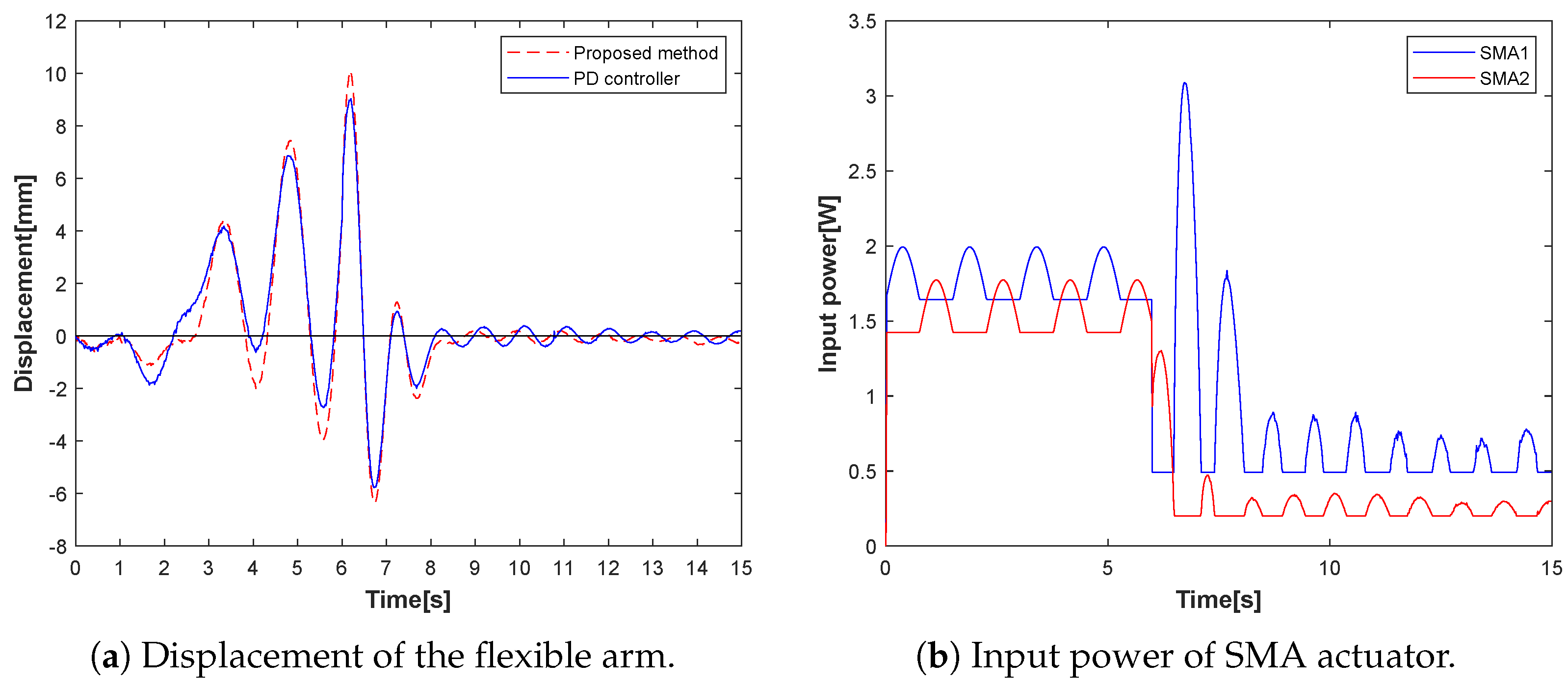
- Traditional PD controller for vibration
- In experimental case 5, the traditional PD controller is compared with the proposed method under normal conditions. The parameters of PD controller are found in Table 3. The displacements of the flexible arm are shown in Figure 10a, where the blue line is for the PD controller as a reference result, and the red dashed line is for the proposed method. The corresponding input power for PD controller is presented in Figure 10b. The displacement of the proposed method is smaller than PD controller with lower input power.

4.2. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Tabrizikahou, A.; Kuczma, M.; Łasecka-Plura, M.; Farsangi, E.N.; Noori, M.; Gardoni, P.; Li, S. Application and modelling of Shape-Memory Alloys for structural vibration control: State-of-the-art review. Constr. Build. Mater. 2022, 342, 127975. [Google Scholar] [CrossRef]
- Lee, S.; Jung, S. Design of a fuzzy compensator for balancing control of a one-wheel robot. Int. J. Fuzzy Log. Intell. Syst. 2016, 16, 188–196. [Google Scholar] [CrossRef]
- Jiang, C.; Ueno, S. Study on vibration control system of structures based on magnetic levitation technology. Eur. J. Emerg. Med. 2020, 7, 19–00307. [Google Scholar] [CrossRef]
- Sohn, J.; Han, Y.; Choi, S.; Lee, Y.; Han, M. Vibration and position tracking control of a flexible beam Using SMA wire actuators. JVC 2009, 15, 263–281. [Google Scholar] [CrossRef]
- Kadokawa, M.; Jiang, C. Development of a thin dielectric elastomer actuator with 3DOFs. In Proceedings of the 2021 International Conference on Advanced Mechatronic Systems (ICAMechS), Tokyo, Japan, 9–12 December 2021; pp. 12–15. [Google Scholar]
- Liu, M.; Wang, Z.; Ikeuchi, D.; Fu, J.; Wu, X. Design and simulation of a flexible bending actuator for solar sail attitude control. Aerospace 2021, 8, 372. [Google Scholar] [CrossRef]
- Baz, A.; Imam, K.; McCoy, J. Active vibration control of flexible beams using shape memory actuators. JSV 1990, 140, 437–456. [Google Scholar] [CrossRef]
- Clarke, J.; Tesfamariam, S.; Yannacopoulos, S. Smart structures using shape memory alloys. In Proceedings of the Sensors and Smart Structures Technologies for Civil, Mechanical, and Aerospace Systems 2009, SPIE, San Diego, CA, USA, 9–12 March 2009; Tomizuka, M., Ed.; International Society for Optics and Photonics: San Diego, CA, USA, 2009; Volume 7292, p. 729205. [Google Scholar]
- Yuse, K.; Kikushima, Y.; Xu, Y. Experimental considerations on fabrication of a smart actuator for vibration control using shape memory alloy (SMA). In Proceedings of the Smart Structures and Materials 2002: Damping and Isolation, San Diego, CA, USA, 17–21 March 2002; Agnes, G.S., Ed.; International Society for Optics and Photonics: San Diego, CA, USA, 2002; Volume 4697, pp. 382–392. [Google Scholar]
- Bu, N.; Liu, H.; Li, W. Robust passive tracking control for an uncertain soft actuator using robust right coprime factorization. Int. J. Robust Nonlinear Control 2021, 31, 6810–6825. [Google Scholar] [CrossRef]
- Amin, A.A.; Hasan, K.M. A review of fault tolerant control systems: Advancements and applications. Measurement 2019, 143, 58–68. [Google Scholar] [CrossRef]
- Nguyen, N.P.; Xuan Mung, N.; Hong, S.K. Actuator fault detection and fault-tolerant control for hexacopter. Sensors 2019, 19, 4721. [Google Scholar] [CrossRef]
- Zhao, K.; Song, J.; Ai, S.; Xu, X.; Liu, Y. Active fault-tolerant control for near-space hypersonic vehicles. Aerospace 2022, 9, 237. [Google Scholar] [CrossRef]
- Hagh, Y.S.; Asl, R.M.; Fekih, A.; Wu, H.; Handroos, H. Active fault-tolerant control design for actuator fault mitigation in robotic manipulators. IEEE Access 2021, 9, 47912–47929. [Google Scholar] [CrossRef]
- Deng, M.; Koyama, A. Operator-based robust fault tolerance control for uncertain nonlinear microreactors with coupling effects. In Proceedings of the 2019 American Control Conference (ACC), Philadelphia, PA, USA, 10–12 July 2019; pp. 3746–3751. [Google Scholar]
- Gao, X.; Cao, W.; Yang, Q.; Wang, H.; Wang, X.; Jin, G.; Zhang, J. Parameter optimization of control system design for uncertain wireless power transfer systems using modified genetic algorithm. CAAI Trans. Intell. Technol. 2022, 7, 582–593. [Google Scholar] [CrossRef]
- Ogihara, Y.; Deng, M. Operator-based nonlinear fault detection and fault tolerant control for microreactor using one-class SVM. Int. J. Adv. Mechatron. Syst. 2020, 8, 109–115. [Google Scholar] [CrossRef]
- Chen, W.; Jiang, J. Fault-tolerant control against stuck actuator faults. IEE Proc. Control Theory Appl. 2005, 152, 138–146. [Google Scholar] [CrossRef]
- Zhang, L.; Wang, Z.; Wang, L.; Zhang, Z.; Chen, X.; Meng, L. Machine learning-based real-time visible fatigue crack growth detection. Digit. Commun. Netw. 2021, 7, 551–558. [Google Scholar] [CrossRef]
- Furukawa, Y.; Deng, M. SVM-based fault detection for double layered tank system by considering ChangeFinder’s characteristics. Int. J. Adv. Mechatron. Syst. 2022, 9, 185–192. [Google Scholar] [CrossRef]
- Li, X.; Yang, G. Robust adaptive fault-tolerant control for uncertain linear systems with actuator failures. IET Control Theory Appl. 2012, 6, 1544–1551. [Google Scholar] [CrossRef]
- Yang, Q.; Ge, S.S.; Sun, Y. Adaptive actuator fault tolerant control for uncertain nonlinear systems with multiple actuators. Automatica 2015, 60, 92–99. [Google Scholar] [CrossRef]
- Qikun, S.; Bin, J.; Peng, S. Active fault-tolerant control against actuator fault and performance analysis of the effect of time delay due to fault diagnosis. Int. J. Control Autom. Syst. 2017, 15, 537–546. [Google Scholar]
- Theilliol, D.; Join, C.; Zhang, Y. Actuator fault tolerant control design based on a reconfigurable reference input. Int. J. Appl. Math. Comput. Sci. 2008, 18, 553–560. [Google Scholar] [CrossRef]
- Wang, T.; Xie, W.; Zhang, Y. Sliding mode fault tolerant control dealing with modeling uncertainties and actuator faults. ISA Trans. 2012, 51, 386–392. [Google Scholar] [CrossRef] [PubMed]
- Su, X.; Xiao, B. Actuator-integrated fault estimation and fault tolerant control for electric power steering system of forklift. Appl. Sci. 2021, 11, 7236. [Google Scholar] [CrossRef]
- Li, X.; Jin, G.; Deng, M. Nonlinear Vibration Control Experimental System Design of a Flexible Arm Using Interactive Actuations from Shape Memory Alloy. Sensors 2023, 23, 1133. [Google Scholar] [CrossRef]
- Deng, M.; Jiang, C.; Inoue, A.; Su, C.Y. Operator-based robust control for nonlinear systems with Prandtl–Ishlinskii hysteresis. Int. J. Syst. Sci. 2011, 42, 643–652. [Google Scholar] [CrossRef]
- Deng, M.; Inoue, A.; Ishikawa, K. Operator-based nonlinear feedback control design using robust right coprime factorization. IEEE Trans. Autom. Control 2006, 51, 645–648. [Google Scholar] [CrossRef]
- Abbaspour, A.; Mokhtari, S.; Sargolzaei, A.; Yen, K.K. A survey on active fault-tolerant control systems. Electronics 2020, 9, 1513. [Google Scholar] [CrossRef]
- Benosman, M.; Lum, K.Y. Passive actuators’ fault-tolerant control for affine nonlinear systems. IEEE Trans. Control Syst. Technol. 2009, 18, 152–163. [Google Scholar] [CrossRef]
- Lunze, J.; Richter, J. Reconfigurable fault-tolerant control: A tutorial introduction. Eur. J. Control 2008, 14, 359–386. [Google Scholar] [CrossRef]
- Ochi, Y.; Kanai, K. Design of restructurable flight control systems using feedback linearization. J. Guid. Control Dyn. 1991, 14, 903–911. [Google Scholar] [CrossRef]
- Bodson, M.; Groszkiewicz, J. Multivariable adaptive algorithms for reconfigurable flight control. IEEE Conf. Decis. Control 1994, 4, 3330–3335. [Google Scholar]
- Morse, W.D.; Ossman, A. Model following reconfigurable flight control system for the AFTI/F-16. J. Guid. Control Dyn. 1990, 13, 969–976. [Google Scholar] [CrossRef]
- Looze, D.; Weiss, J.; Eterno, J.; Barrett, N. An automatic redesign approach for restructurable control systems. IEEE Contr. Syst. Mag. 1985, 5, 16–22. [Google Scholar] [CrossRef]
- Wang, F.; Qian, Z.; Yan, Z.; Yuan, C.; Zhang, W. A novel resilient robot: Kinematic analysis and experimentation. IEEE Access 2020, 8, 2885–2892. [Google Scholar] [CrossRef]
- Gao, S.; Liu, J. Adaptive fault-tolerant boundary vibration control for a flexible aircraft wing against actuator and sensor faults. JVC 2022, 28, 1025–1034. [Google Scholar] [CrossRef]
- Li, L.; Liu, J. Event-triggered adaptive fault-tolerant vibration control for a flexible robotic manipulator based on the partial differential equation model. Int. J. Adapt. Control Signal Process. 2022, 36, 2083–2099. [Google Scholar] [CrossRef]
- Li, L.; Cao, F.; Liu, J. Adaptive vibration control for constrained moving vehicle-mounted nonlinear 3D rigid-flexible manipulator system subject to actuator failures. J. Vib. Control 2022. [Google Scholar] [CrossRef]
- Hasan, M.N.; Haris, M.; Qin, S. Vibration suppression and fault-tolerant attitude control for flexible spacecraft with actuator faults and malalignments. Aerosp. Sci. Technol. 2022, 120, 107290. [Google Scholar] [CrossRef]
- Wang, J.; Cao, F.; Liu, J. Nonlinear partial differential equation modeling and adaptive fault-tolerant vibration control of flexible rotatable manipulator in three-dimensional space. Int. J. Adapt. Control Signal Process. 2021, 35, 2138–2154. [Google Scholar] [CrossRef]
- Cao, L.; Dolovich, A.T.; Schwab, A.L.; Herder, J.L.; Zhang, W. Toward a unified design approach for both compliant mechanisms and rigid-body mechanisms: Module optimization. J. Mech. Des. 2015, 137, 122301. [Google Scholar] [CrossRef]




| Description | Parameters [Unit] | Value |
|---|---|---|
| Length | [m] | |
| Diameter | [m] | |
| Resistance | [] | |
| Heat transfer coefficient | [W/mC] | 689 |
| Surface area | [m] | |
| Mass | [kg] | |
| Specific heat | [J/kg C] | 7349 |
| Parameters | Symbol [Unit] | Value |
|---|---|---|
| Sampling time | ||
| Experimental time | 15 | |
| Forced vibration time | 6 | |
| Ambient temperature | 20 | |
| PD controller’s parameter | ||
| PD controller’s parameter | ||
| Designed parameter |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, X.; Jin, G.; Deng, M. Nonlinear Fault-Tolerant Vibration Control for Partial Actuator Fault of a Flexible Arm. Dynamics 2023, 3, 234-249. https://doi.org/10.3390/dynamics3020014
Li X, Jin G, Deng M. Nonlinear Fault-Tolerant Vibration Control for Partial Actuator Fault of a Flexible Arm. Dynamics. 2023; 3(2):234-249. https://doi.org/10.3390/dynamics3020014
Chicago/Turabian StyleLi, Ximei, Guang Jin, and Mingcong Deng. 2023. "Nonlinear Fault-Tolerant Vibration Control for Partial Actuator Fault of a Flexible Arm" Dynamics 3, no. 2: 234-249. https://doi.org/10.3390/dynamics3020014